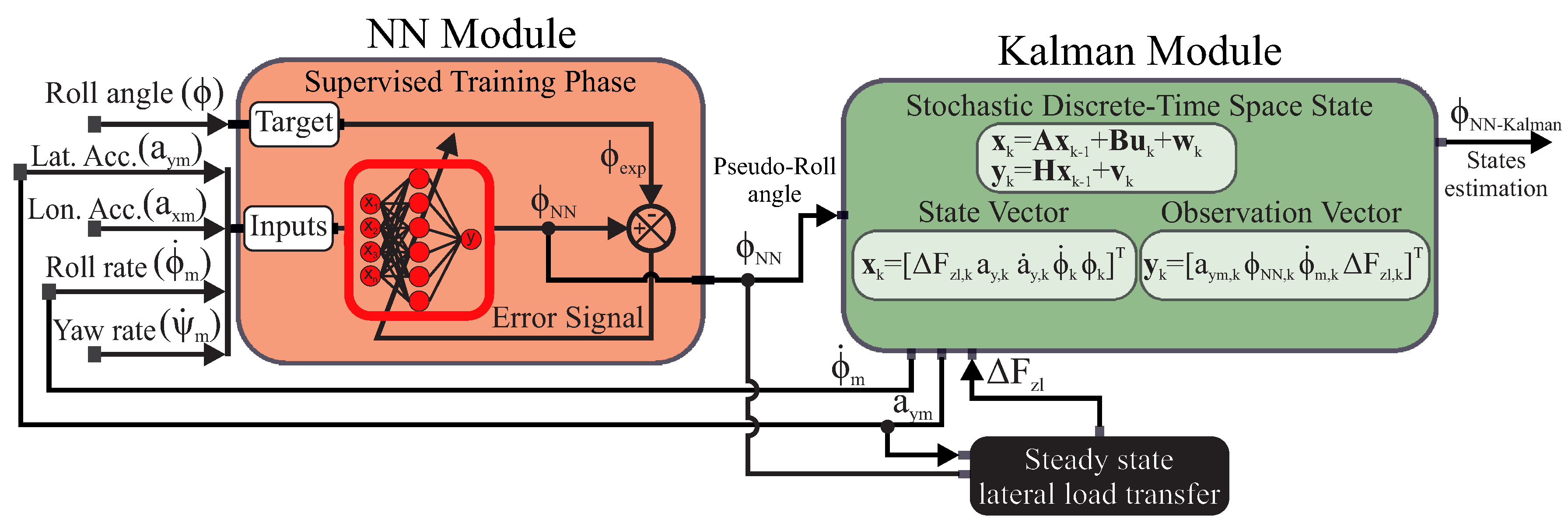
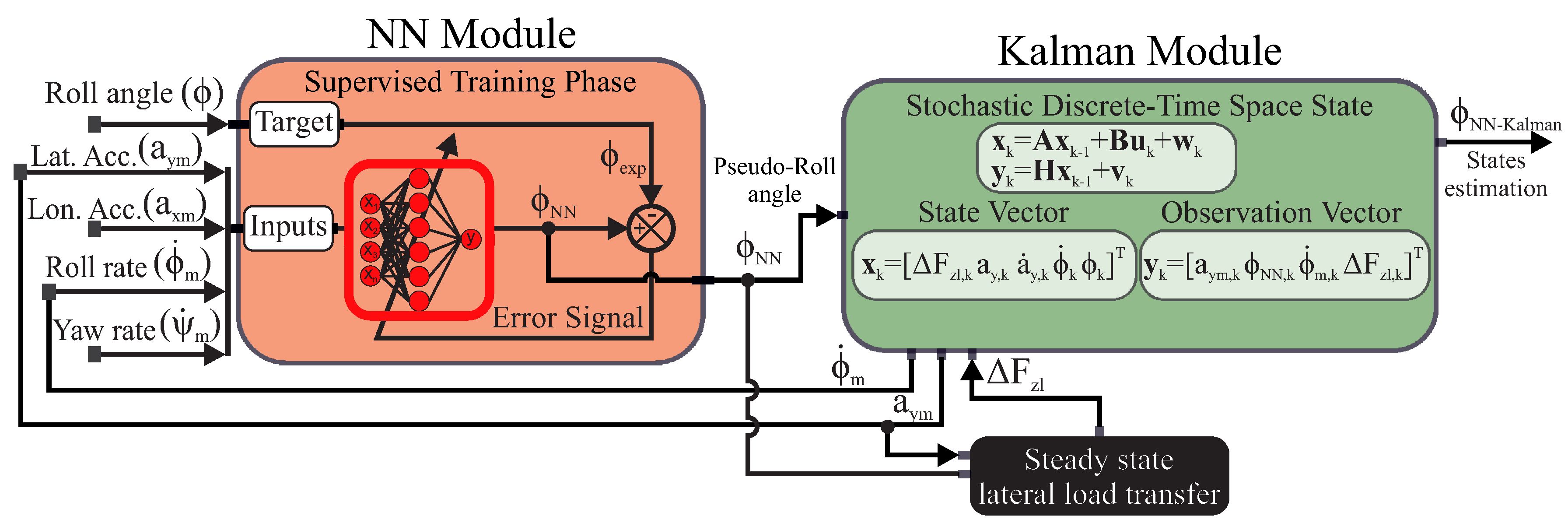
The Kalman module employs a discrete stochastic state-space form. The purpose of this module is to estimate the internal state of a linear dynamic system by means of a Kalman filter. The Kalman filter is a mathematical tool that is used for stochastic estimation from noisy sensor measurements. The real vehicle measurements include a substantial quantity of noise, as well as unobserved states in the system, which must be estimated. In this research, the unobserved state is the roll angle. The preliminary reconstruction of the roll angle obtained from the NN-based observer is used as a “pseudo-measurement” input to the Kalman filter. This previous calculation presents the advantage of considering the system non-linearities, thus providing good estimations, even though a linear vehicle model, represented as a state-space model, is used.
2.2.1. State-Space Vehicle Model
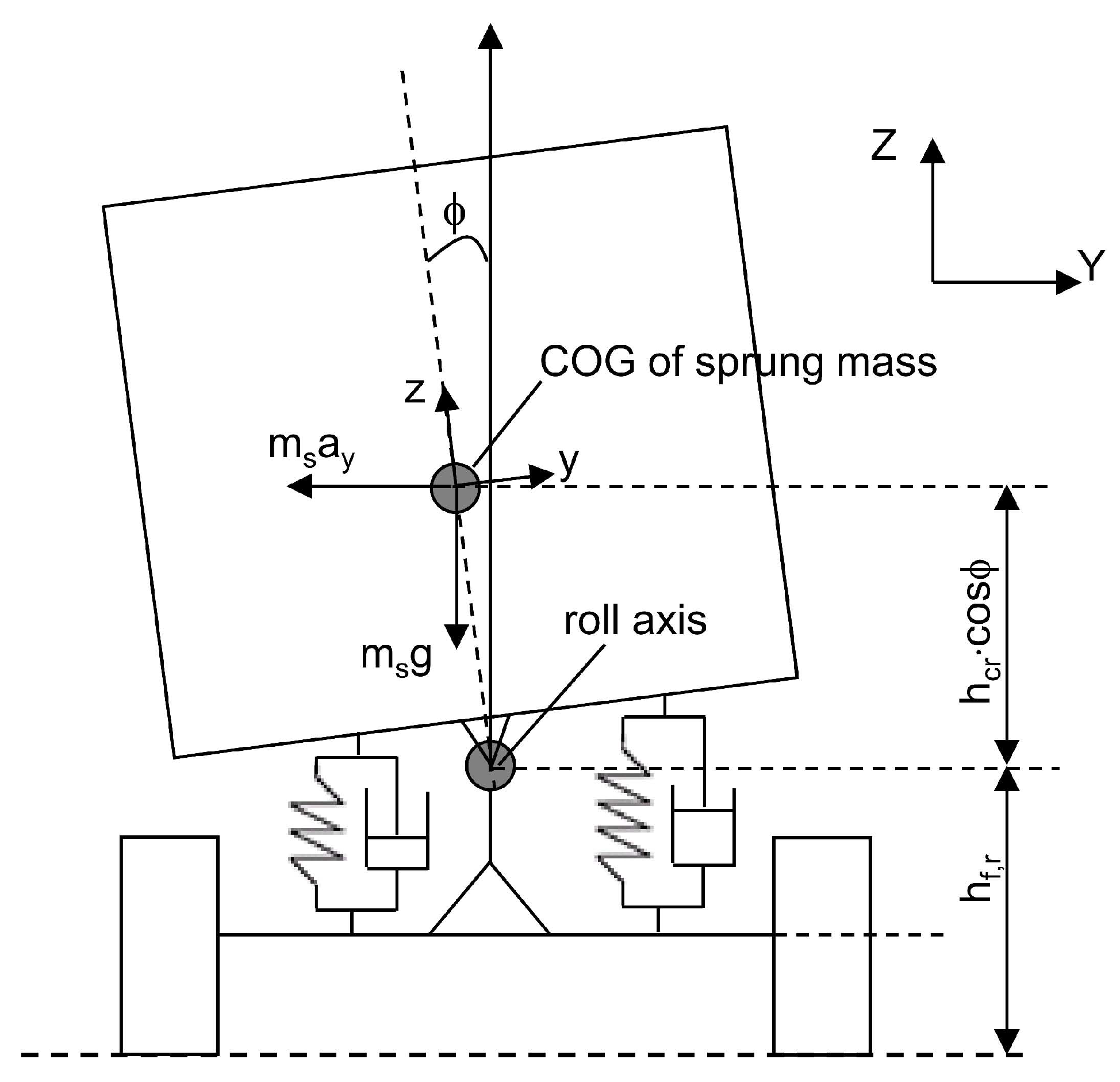
The dynamic vehicle model used in the Kalman filter algorithm is a linear model. When the vehicle model and measurement model equations are linear, the Kalman filter estimates the state vector recursively. An advantage of using linear systems is that they are easy to implement allowing the usage of the Kalman filter estimators in real time. For this reason, the dynamic model detailed in the estimation process is a 1-DOF vehicle model, which only represents vehicle roll motion. In
Figure 3, the vehicle roll model is shown. The motion is described using a coordinate system (x, y, z) fixed in the vehicle. The vehicle roll angle,
, is referenced from the vehicle’s vertical z-axis. It is assumed that the vehicle sprung mass rotates around the roll center of the vehicle. A detailed description of this model can be found in [
10]. The differential equation obtained from the vehicle’s lateral dynamics can be written as:
where
is the moment of inertia of the sprung mass
with respect to the roll axis,
and
denote respectively the total torsional damping and stiffness coefficients of the roll motion of the vehicle,
is the height of the sprung mass about the roll axis,
g is the gravitational constant and
is the lateral acceleration.
The lateral load transfer function can be obtained assuming that roll acceleration
and velocity
are equal to zero. The steady-state equation for lateral load transfer applied to the left-hand side of the vehicle is given by:
where
and
are the heights of the front and rear roll centers, respectively;
and
are the front and rear roll stiffnesses, respectively;
and
are the front and rear vehicle tracks, respectively; and
and
are the distance from the COG (Center Of Gravity) to the front and rear axles, respectively. It must be noted that the lateral acceleration,
, used in Equations (
8) and (
9), is an inertial acceleration generated at the COG. Since the IMU provides a measurement of the acceleration due to the vehicle’s motion (
) and due to gravitational acceleration
, the lateral acceleration (
) can be computed as:
Assuming that the small roll angle approximation (i.e.,
and
) is valid, the measured lateral acceleration,
, can be expressed as:
In addition, assuming that the pitching and the bounding motion of sprung mass are neglected and the road bank angle is small, the vehicle roll rate can be expressed as:
The vehicle model is represented as a continuous time state-space system as follows:
where
represents the state vector
;
is the state evolution matrix;
is the measurement vector;
;
is the observation matrix; and
and
are the state disturbance and the observation noise vectors, respectively, that are assumed to be Gaussian, uncorrelated and zero mean:
where
and
are the covariance matrices describing the second-order properties of state and measurement noise:
depends on sensor quality (the yaw and roll rates) and the lateral load transfer and pseudo-roll angle estimator quality. is often unknown and is tuned depending the developed model. and are assumed time invariant and diagonal for simplicity reason.
According to the chosen state-space vector and measurements, the matrices
and
are defined as:
In order to operate with the sensor data, the discrete state-space system is obtained using the first order approximation of Euler
, where
is the sampling time. Therefore, the discrete system can be expressed as:
where
, and the matrix
can be expressed as:
2.2.2. Kalman Filter Algorithm
In this work, a Linear Kalman Filter (LKF) algorithm was used to estimate the vehicle state. The LKF is summarized in the following recursive equations:
Time update
Prediction of state and covariance:
Measurement update:
State and covariance estimation:
The vector
contains sensor data, such as the lateral acceleration,
, and the roll rate,
, and pseudo-measurements, such as the lateral load transfer,
, calculated by Equation (
9), and roll angle,
. In order to prove the effectiveness of the proposed method, the pseudo-roll angle is computed in two different ways: (1) considering the suspension deflection, Equation (
1); (2) considering the proposed NN estimator.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}