Remote Bridge Deflection Measurement Using an Advanced Video Deflectometer and Actively Illuminated LED Targets

Abstract
:1. Introduction
2. An Advanced Video Deflectometer for Real-Time, Remote Bridge Deflection Measurement
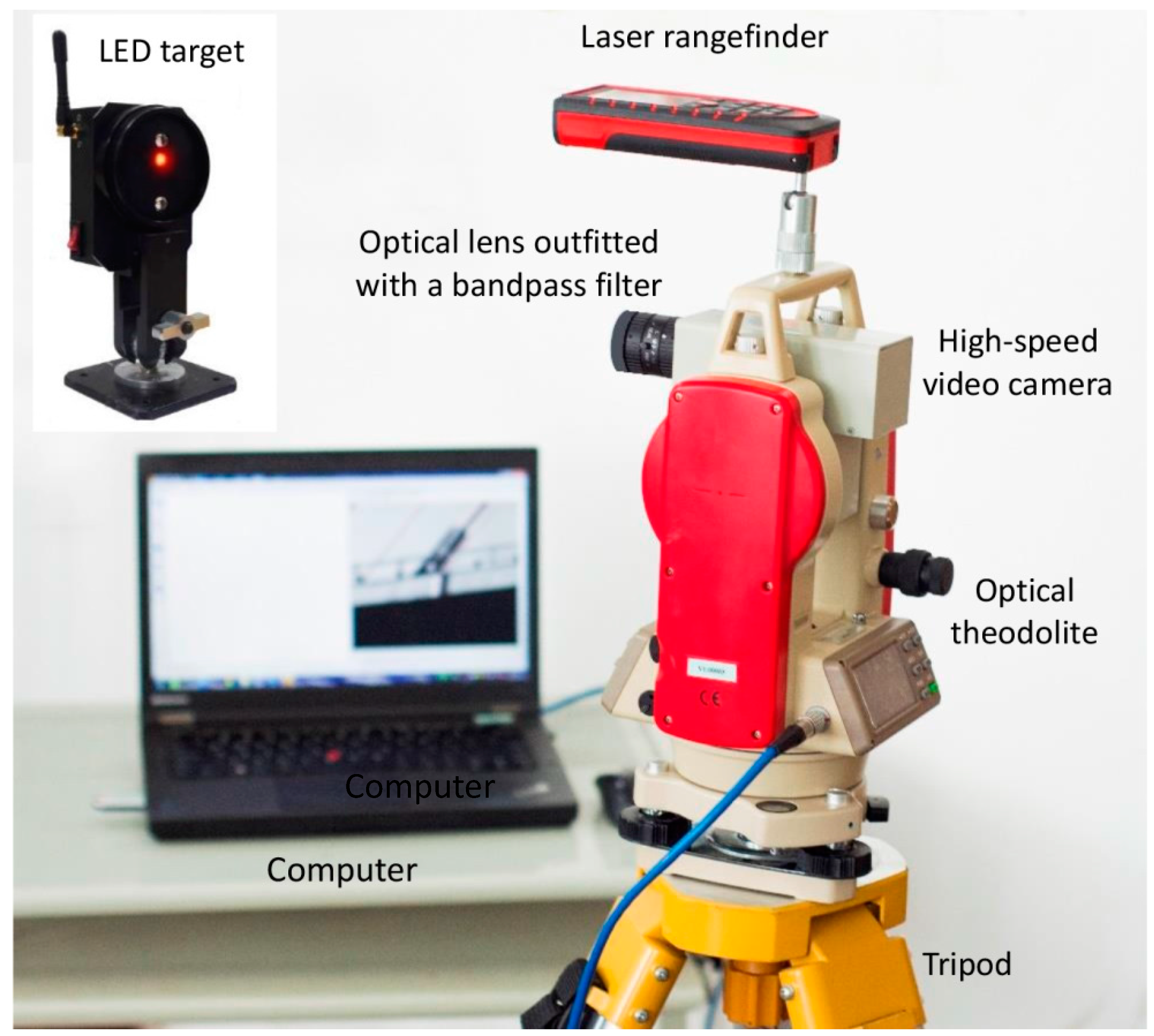
2.1. System Configuration
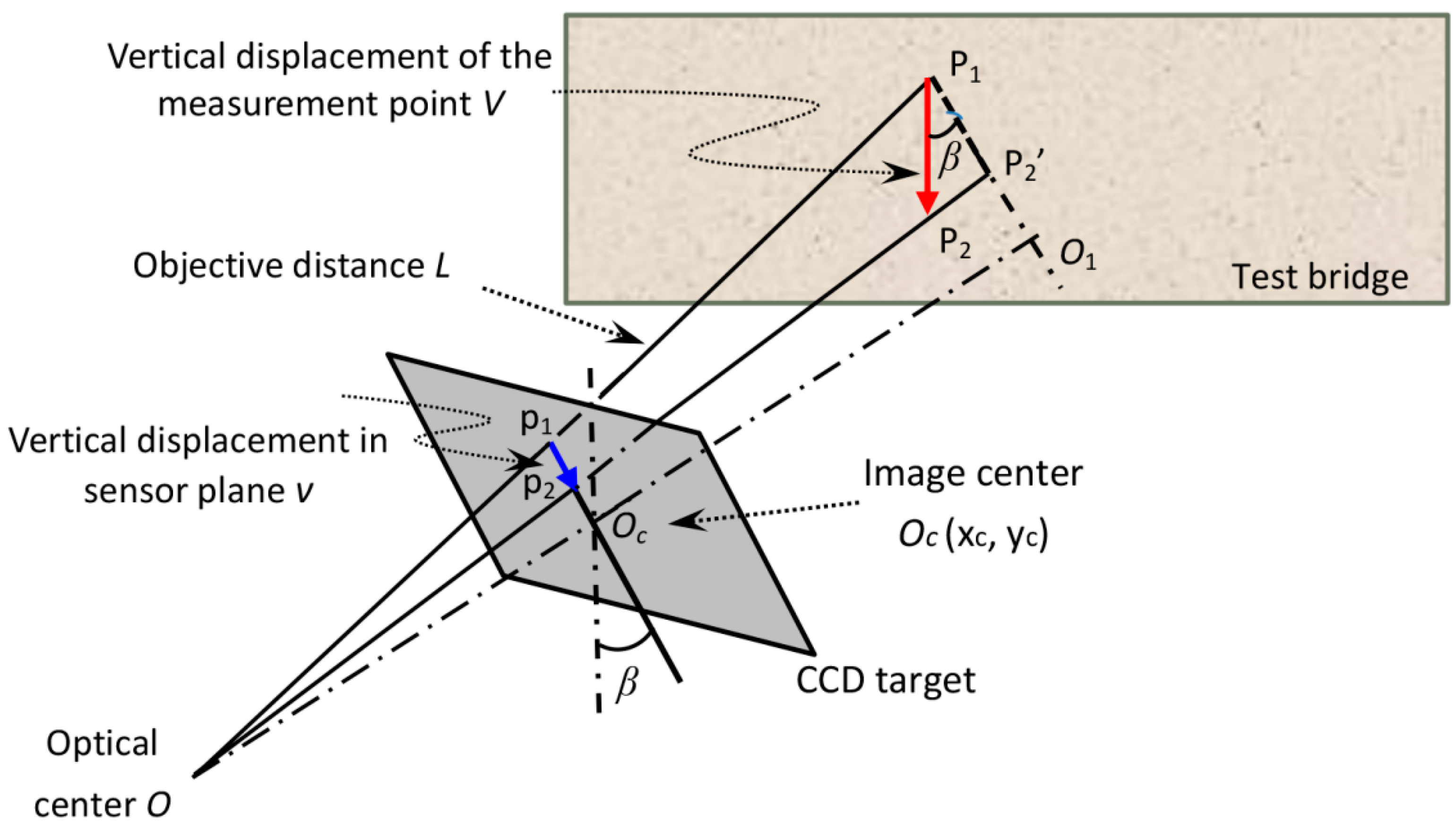
2.2. Measurement Procedures and Principles
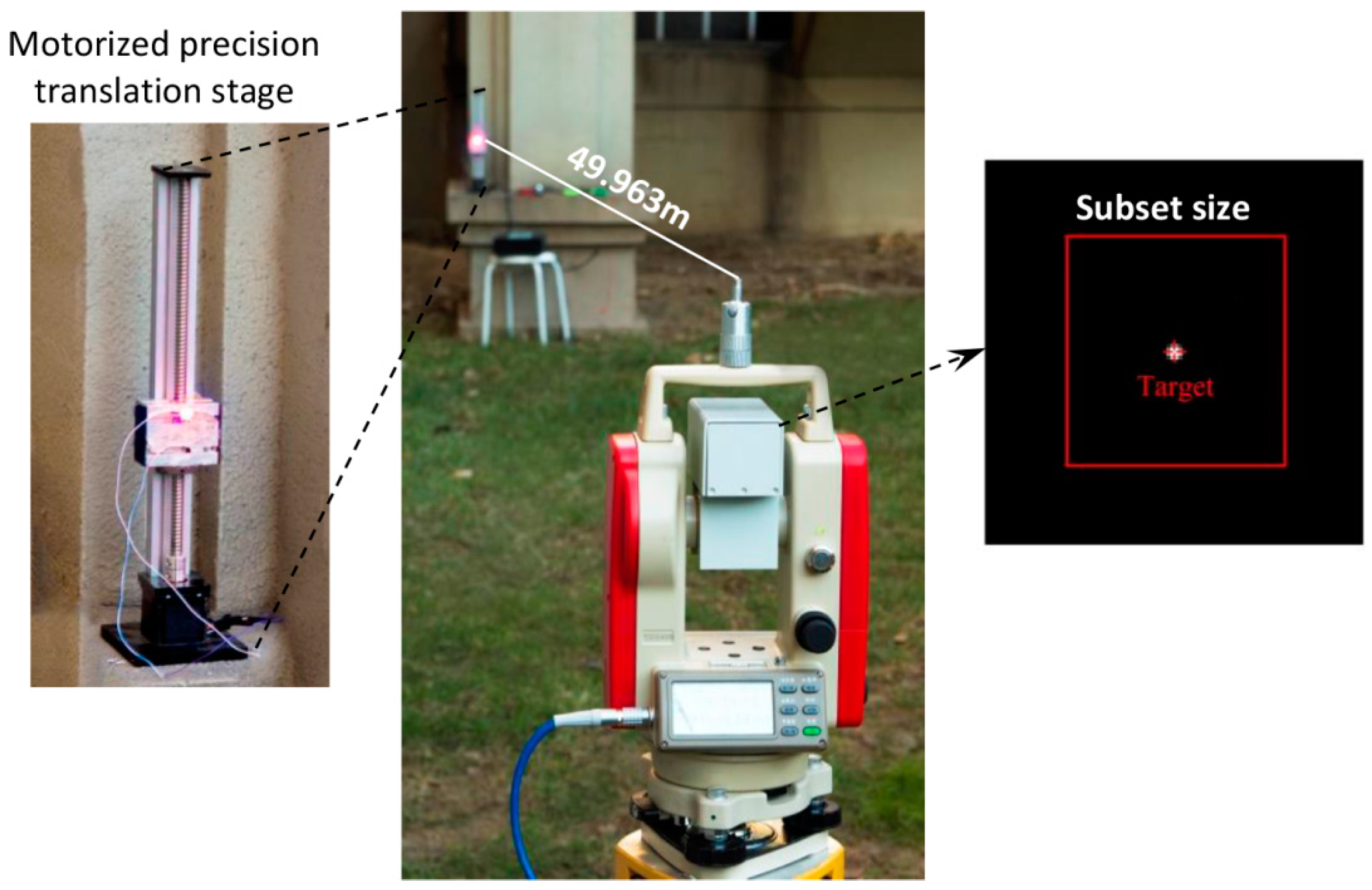
3. Accuracy Validation of the Video Deflectometer for Tracking LED Targets
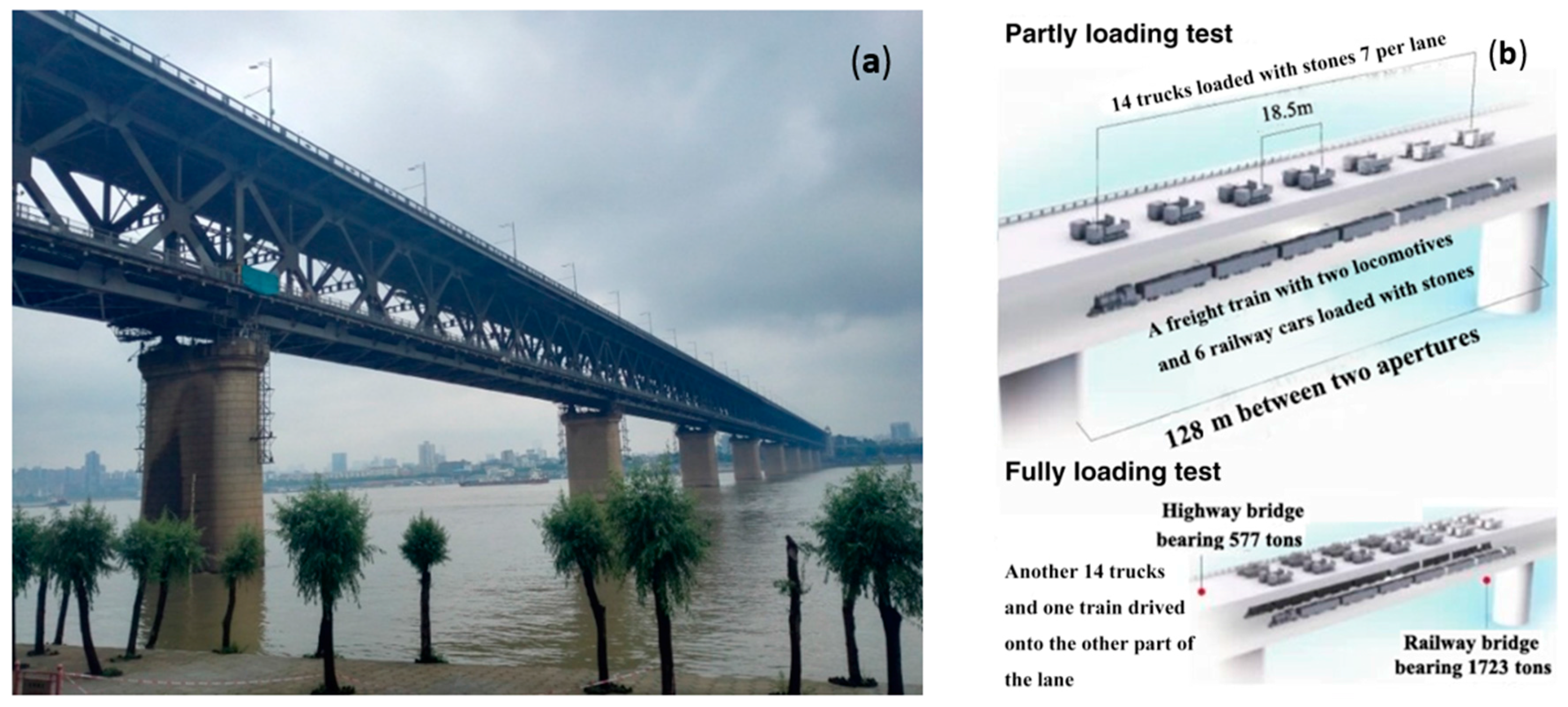
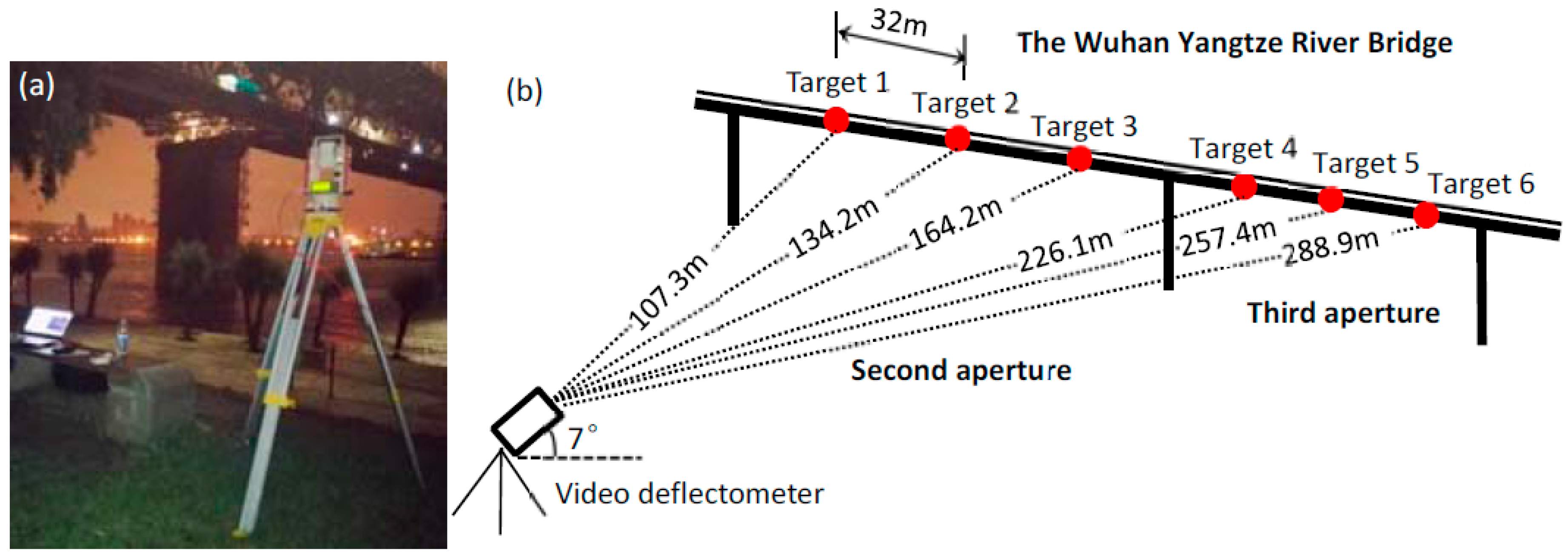
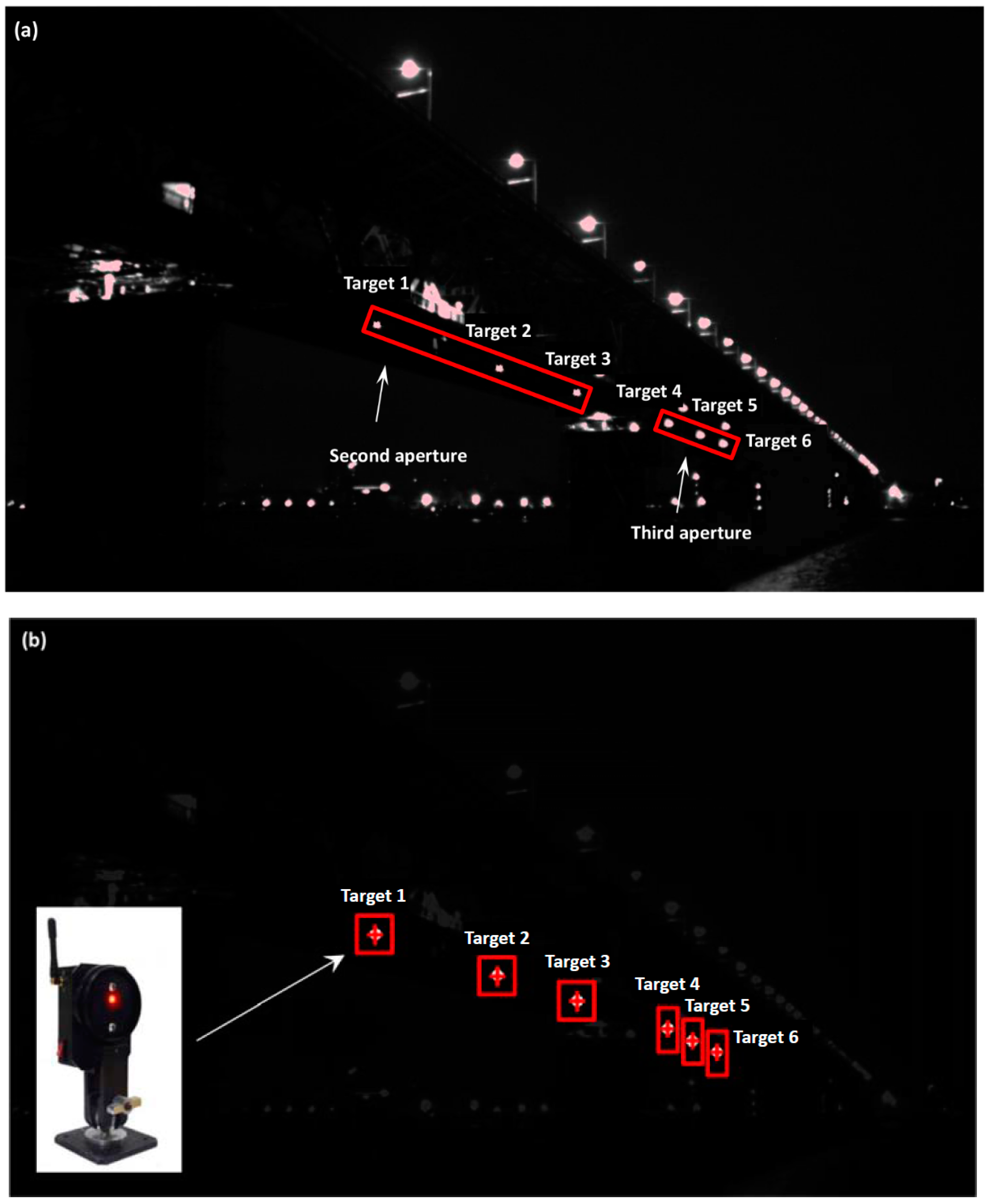
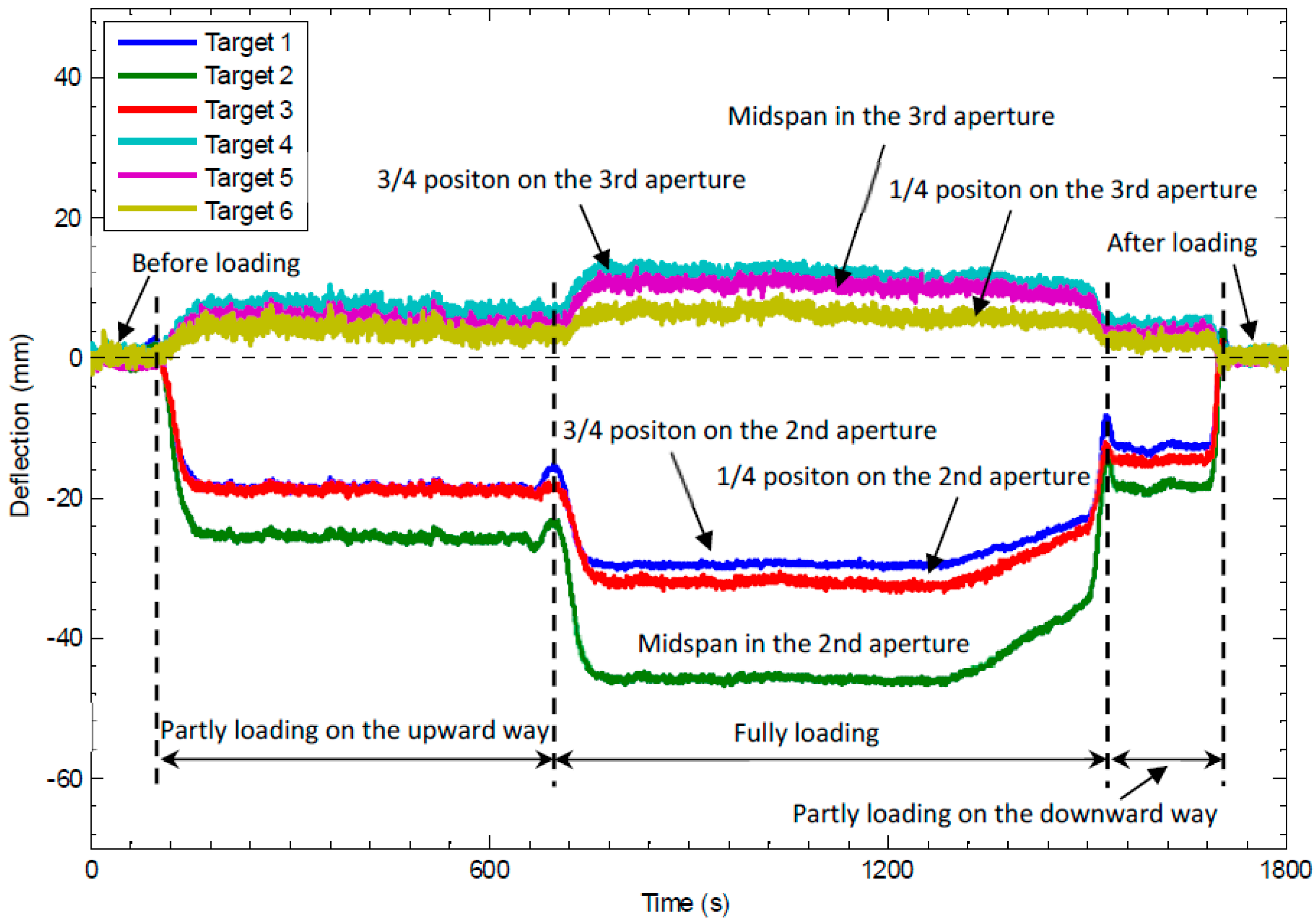
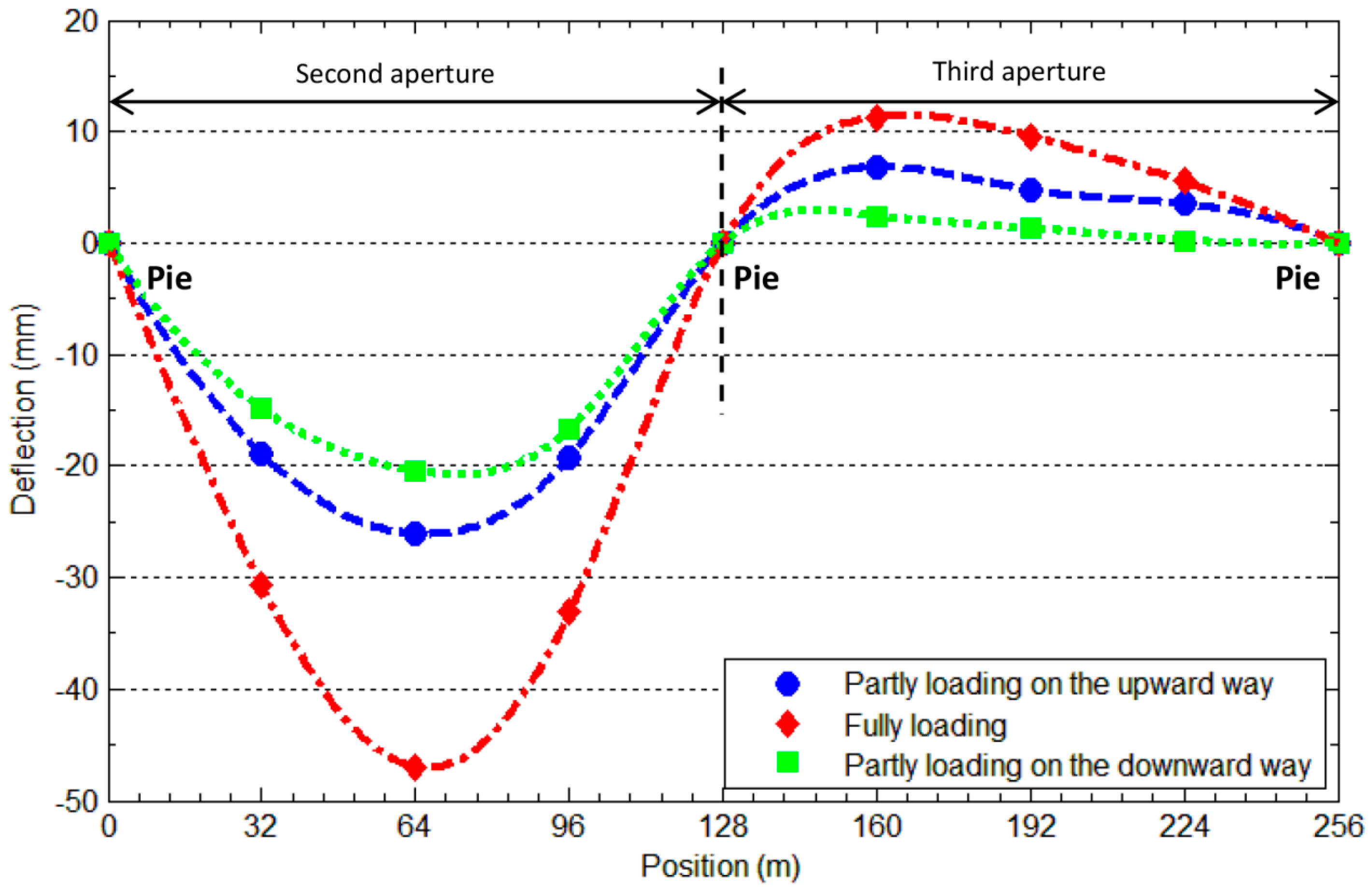
4. Deflection Measurements of the Wuhan Yangtze River Bridge under Static Loading
- (1)
- Partly loading on the upward way: the vehicles and the trains were loaded on the upward way simultaneously;
- (2)
- Full loading: the vehicles and trains were loaded on both the upward and downward ways;
- (3)
- Partly loading on the downward way: unload the vehicles and cars on the upward way and remain the loads on the downward way.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Brown, C.J.; Karuma, R.; Ashkenazi, V.; Roberts, G.W.; Evans, R.A. Monitoring of structures using the global positioning system. Struct. Build. 1999, 134, 97–105. [Google Scholar] [CrossRef]
- Meng, X.; Dodson, A.H.; Roberts, G.W. Detecting bridge dynamics with GPS and triaxial accelerometers. Eng. Struct. 2007, 29, 3178–3184. [Google Scholar] [CrossRef]
- Xia, H.; Roeck, G.D.; Zhang, N.; Maeck, J. Experimental analysis of a high-speed railway bridge under Thalys trains. J. Sound Vib. 2003, 268, 103–113. [Google Scholar] [CrossRef]
- Pieraccini, M.; Parrini, F.; Fratini, M.; Atzeni, C.; Spinelli, P.; Micheloni, M. Static and dynamic testing of bridges through microwave interferometry. NDT E Int. 2007, 40, 208–214. [Google Scholar] [CrossRef]
- Psimoulis, P.A.; Stiros, S.C. Measuring deflections of a short-span railway bridge using a robotic total station. J. Bridge Eng. 2013, 18, 182–185. [Google Scholar] [CrossRef]
- Stephen, G.A.; Brownjohn, J.M.W.; Taylor, C.A. Measurements of static and dynamic displacement from visual monitoring of the Humber Bridge. Eng. Struct. 1993, 154, 197–208. [Google Scholar] [CrossRef] [Green Version]
- Oleszak, P. Investigation of the dynamic characteristic of bridge structures using a computer vision method. Measurement 1999, 25, 227–236. [Google Scholar] [CrossRef]
- Wahbeh, A.M.; Caffrey, J.P.; Masri, S.F. A vision-based approach for the direct measurement of displacements in vibrating systems. Smart Mater. Struct. 2003, 12, 785–794. [Google Scholar] [CrossRef]
- Lee, J.J.; Shinozuka, M. Real-time displacement measurement of a flexible bridge using digital image processing techniques. Exp. Mech. 2006, 46, 105–114. [Google Scholar] [CrossRef]
- Yoneyama, S.; Kitagawa, A.; Iwata, S.; Tani, K.; Kikuta, H. Bridge deflection measurement using digital image correlation. Exp. Tech. 2007, 31, 34–40. [Google Scholar] [CrossRef]
- Busca, G.; Cigada, A.; Mazzoleni, P.; Zappa, E. Vibration monitoring of multiple bridge points by means of a unique vision-based measuring system. Exp. Tech. 2014, 54, 255–271. [Google Scholar] [CrossRef]
- Ribeiro, D.; Calcada, R.; Ferreira, J.; Martins, T. Non-contact measurement of the dynamic displacement of railway bridges using an advanced video-based system. Eng. Struct. 2014, 75, 164–180. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q.; Ozer, E.; Fakuda, Y. A vision-based sensor for noncontact structural displacement measurement. Sensors 2015, 15, 16557–16575. [Google Scholar] [CrossRef] [PubMed]
- Pan, B.; Tian, L.; Song, X.L. Real-time, non-contact and targetless measurement of vertical deflection of bridges using off-axis digital image correlation. NDT E Int. 2016, 79, 73–80. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S.C. Three-dimensional dynamic deflections and natural frequencies of a stiff footbridge based on measurements of collocated sensors. Struct. Control Health Monitor. 2014, 21, 23–42. [Google Scholar] [CrossRef]
- Jung, W.; Shin, D.; Woo, S.; Park, W.; Kim, S. Hibrid approach of cameras and GPS for displacement measurements of super long-span bridges. In Proceedings of the 28th Congress of the International Association for Automation and Robotics in Construction, Seoul, Korea, 29 June–2 July 2011.
- Pan, B.; Wu, D.F.; Wang, Z.Y.; Xia, Y. High-temperature digital image correlation for full-field deformation measurement at 1200 °C. Meas. Sci. Technol. 2011, 22, 015701. [Google Scholar] [CrossRef]
- Pan, B.; Wu, D.F.; Xia, Y. An active imaging digital image correlation method for deformation measurement insensitive to ambient light. Opt. Laser Technol. 2012, 44, 204–209. [Google Scholar] [CrossRef]
- Pan, B.; Li, K.; Tong, W. Fast, robust and accurate digital image correlation calculation without redundant computations. Exp. Mech. 2013, 53, 1277–1289. [Google Scholar] [CrossRef]
- Yoneyama, S.; Ueda, H. Bridge deflection measurement using digital image correlation with camera movement correction. Mater. Trans. 2012, 53, 285–290. [Google Scholar] [CrossRef]
- Yu, L.P.; Pan, B. The errors in digital image correlation due to overmatched shape functions. Meas. Sci. Technol. 2015, 26, 045202. [Google Scholar] [CrossRef]
- Schreier, H.W.; Braasch, J.R.; Sutton, M.A. Systematic errors in digital image correlation caused by intensity interpolation. Opt. Eng. 2000, 39, 2915–2921. [Google Scholar] [CrossRef]
- Pan, B. Bias error reduction of digital image correlation using Gaussian pre-filtering. Opt. Lasers Eng. 2013, 51, 1161–1167. [Google Scholar] [CrossRef]
- Baldi, A.; Bertolino, F. Experimental analysis of the errors due to polynomial interpolation in digital image correlation. Strain 2015, 51, 248–263. [Google Scholar] [CrossRef]
- Pan, B.; Xie, H.; Wang, Z.; Qian, K.; Wang, Z. Study on subset size selection in digital image correlation for speckle patterns. Opt. Express 2008, 16, 7037–7048. [Google Scholar] [CrossRef] [PubMed]
- Wuhan Yangtze River Bridge. Available online: https://en.wikipedia.org/wiki/Wuhan_Yangtze_River_Bridge (accessed on 20 August 2016).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measuring Distance (m) | Mean Error (mm) | Standard Deviation (mm) |
|---|---|---|
| 10.605 | 0.0091 | 0.0074 |
| 49.963 | 0.0150 | 0.0695 |
| 101.428 | 0.0970 | 0.2021 |
| 201.485 | −0.1542 | 0.2795 |
| 300.152 | 0.5674 | 0.5897 |
| Target No. | Measuring Distance (m) | Mean Error (mm) | Standard Deviation (mm) |
|---|---|---|---|
| 1 | 107.3 | −0.1566 | 0.1960 |
| 2 | 134.2 | 0.1898 | 0.2337 |
| 3 | 164.2 | 0.1190 | 0.2978 |
| 4 | 226.1 | −0.1157 | 0.4783 |
| 5 | 257.4 | 0.2107 | 0.4519 |
| 6 | 288.9 | 0.0204 | 0.5712 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, L.; Pan, B. Remote Bridge Deflection Measurement Using an Advanced Video Deflectometer and Actively Illuminated LED Targets. Sensors 2016, 16, 1344. https://doi.org/10.3390/s16091344
Tian L, Pan B. Remote Bridge Deflection Measurement Using an Advanced Video Deflectometer and Actively Illuminated LED Targets. Sensors. 2016; 16(9):1344. https://doi.org/10.3390/s16091344
Chicago/Turabian StyleTian, Long, and Bing Pan. 2016. "Remote Bridge Deflection Measurement Using an Advanced Video Deflectometer and Actively Illuminated LED Targets" Sensors 16, no. 9: 1344. https://doi.org/10.3390/s16091344