1. Introduction
With the ability of measuring three force components and three torque components, the six-axis force sensor is one kind of the most important and challenging sensors, used widely in many research areas such as wind tunnel balances, thrust stand testing of rocket engines, and in robotics, the automobile industry, aeronautics, etc. [
1]. Compared with single-axis sensors, not only the volumes and prices of multi-axis force sensors are considered, but also their structures, in order to achieve a balance between the isotropy of force/torque and that of sensitivity [
2]. Recently, researchers all over the world have done a lot of work on six-axis force sensors.
Since the Stewart platform was applied to the measurement of space six-axis forces by measuring the forces in the six legs with convection elements in 1983 [
3], parallel structure have been widely used in six-axis force sensors [
4], stimulated by the advantages of good stiffness, symmetric and compact structure, and straightforward mapping expression between the wrenches applied on the platform and the measured leg forces. Nguyen et al. [
5] developed a Stewart platform-based sensor with LVDT’s mounted along the legs for force/torque measurement in the presence of passive compliance. Durand changed the traditional Stewart structure and put piezoelectric quartz inside the Stewart structure and pre-tightened it [
6], therefore, the sensor was more compact and could be used to measure tensions. Dwarakanath et al. [
7,
8] introduced the usage of ring-shaped sensing element in the Stewart platform sensor, and presented a simply supported, ‘joint less’ six-axis parallel force sensor. Kim et al. [
9] put forward a six-axis wrist force sensor using FEM for an intelligent robot.
Although research on the traditional Stewart platform-based six-axis force sensor is quite mature, the sensor with common joints has a lower precision, and the performance of each direction is different. In comparison, the sensor with flexible joints has features of compact structure, fast response, small accumulated error, no mechanical friction, and high measurement accuracy because of the use of integrated design, so it has broad application prospects [
10,
11,
12,
13,
14]. Kerr [
15] suggested that the Stewart platform with instrumented elastic legs can be used as a six-axis force sensor. Jin et al. [
16] proposed a novel isotropic six-axis force sensor based on a variation of Stewart platform, whose three pairs of elastic legs are perpendicular to the three orthogonal surfaces of the basic cube. Gao et al. [
17] developed a six-axis controller based on Stewart platform-based force sensor, and introduced the elastic joints to replace the real spherical joints which made the miniaturization possible. Liang et al. [
18] designed and developed a new six-axis sensor system with a compact monolithic elastic element (EE), which detected the tangential cutting forces
Fx,
Fy and
Fz (i.e., forces along x-, y-, and z-axis) as well as the cutting moments
Mx,
My and
Mz (i.e., moments about x-, y-, and z-axis) simultaneously. Unfortunately, most of the sensors mentioned above are used in a small range of applications. Nowadays, the large measurement range six-axis force sensor is more and more widely needed in applications such as aircraft landing gear momentum tests, rocket thrust tests, spacecraft docking and wind tunnel tests, whose precision requirements are also getting increasingly higher. However, when the parallel six-axis force sensor is used in large measurement range occasions, the traditional joints are difficult to be processed into flexible joints, and the improvement of measurement accuracy will be affected, so parallel six-axis force sensors with large measurement range and high accuracy are urgently required.
When the force transmission relation of the sensor is established, the stiffness of each flexible joint and the whole stiffness which has a direct impact on the measuring accuracy, bearing capacity and dynamic performance, and is one of the important indexes to measure the performance of sensors must be considered. Research on stiffness of the sensors based on parallel mechanism began in the 1990s [
19], which gave Gosselin’s minimalist stiffness mapping model of parallel mechanism under no loading. Then, Griffis and Duffy [
20] proposed a kind of parallel mechanism with branches which are assumed to be wire springs. Under the premise of joints are equivalent, they considered the effect of differential motion, and established the complete stiffness model by the analytical method. Chakarov [
21] analyzed the effect of external load on the overall stiffness matrix in force redundant parallel mechanism. Pashkevich et al. [
22] proposed a kind stiffness modeling method of the over-constrained parallel mechanism with flexible branches and flexible drive joints. Zhang and Wei [
23] derived the stiffness model of the mechanism and evaluated the global stiffness using the sum of the diagonal elements of the stiffness matrix. However, existing institutions to complete stiffness modeling methods are very complex, and there is little research combining together stiffness and force Jacobian matrix.
In this paper, a kind of six-axis force sensor based on 6-UPUR parallel mechanism with flexible joints, which has large measurement range and high accuracy is proposed. Meanwhile, the complete mathematical model considering the flexibility of the joints is established, and the calibration experiment is completed.
The structure of this paper is as follows: after the introduction,
Section 2 concerns the structural analysis of the sensors, including the intrinsic disadvantages of the traditional parallel sensors based on the Stewart platform and the structure features of the large measurement range six-axis force sensor of 6-UPUR parallel mechanism with flexible joints. The measuring principle, mathematical model of the structure which included the ideal state and the state of flexibility of each flexible joint is considered in
Section 3.
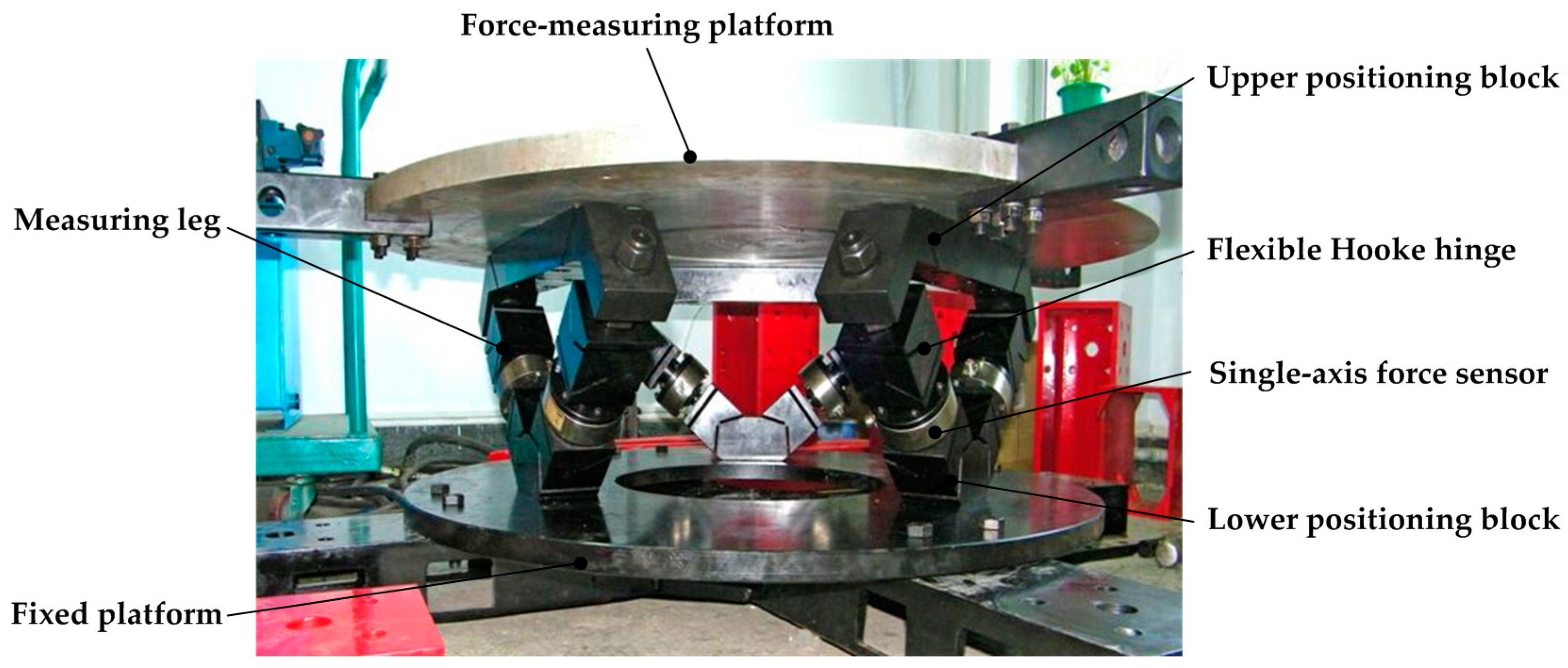
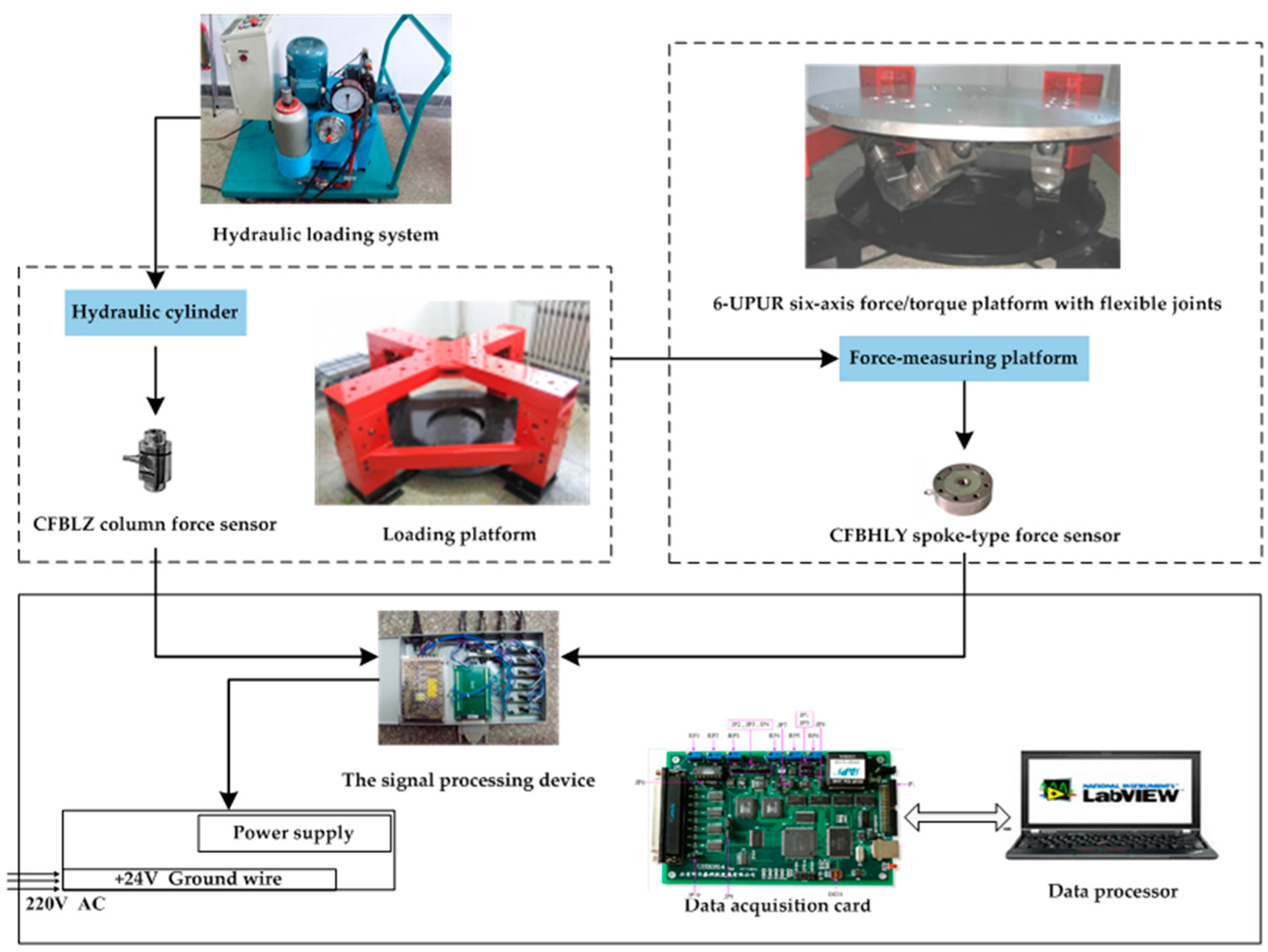
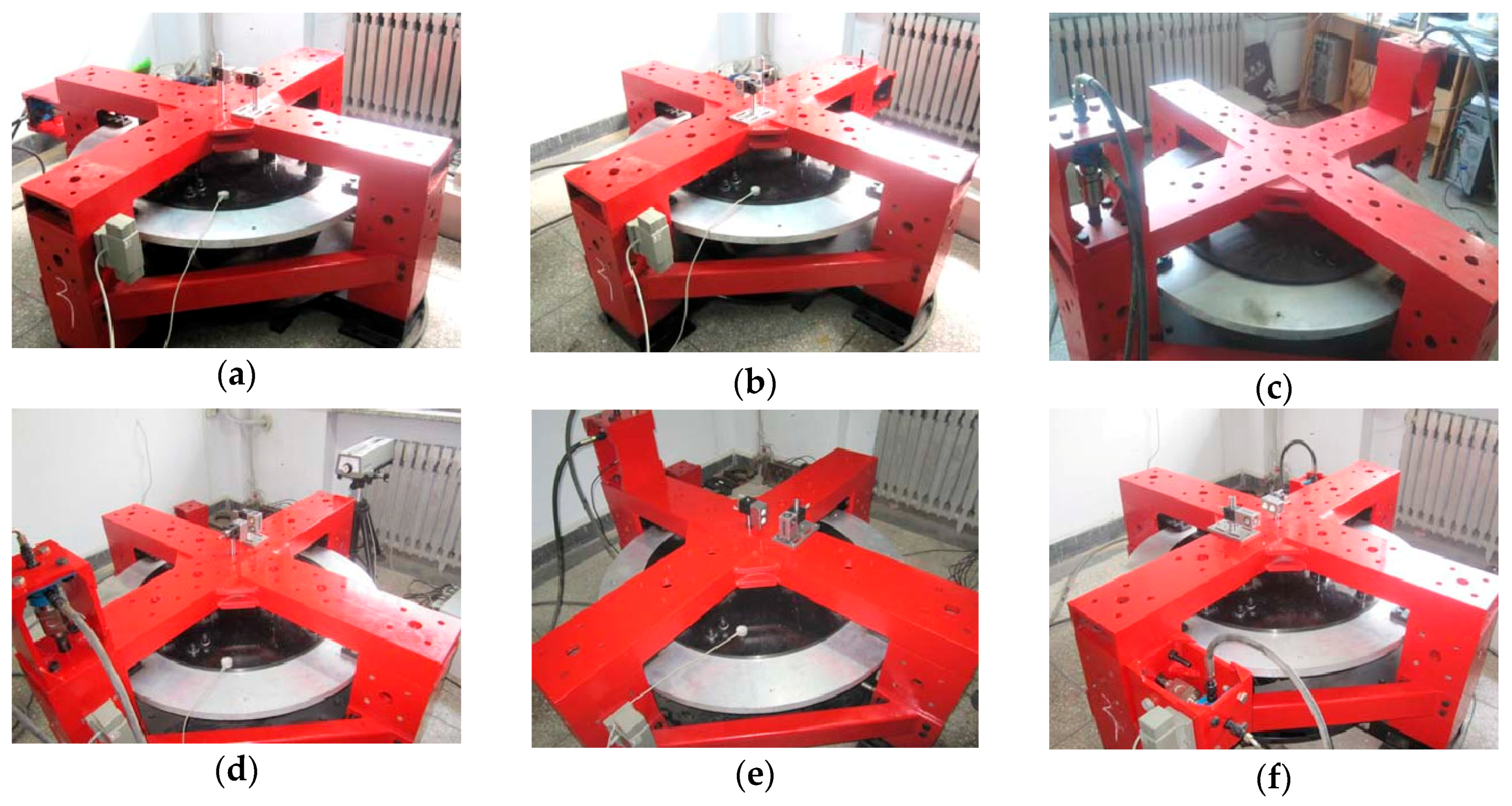
Section 4 introduces the experimental research on static calibration of the sensor prototype.
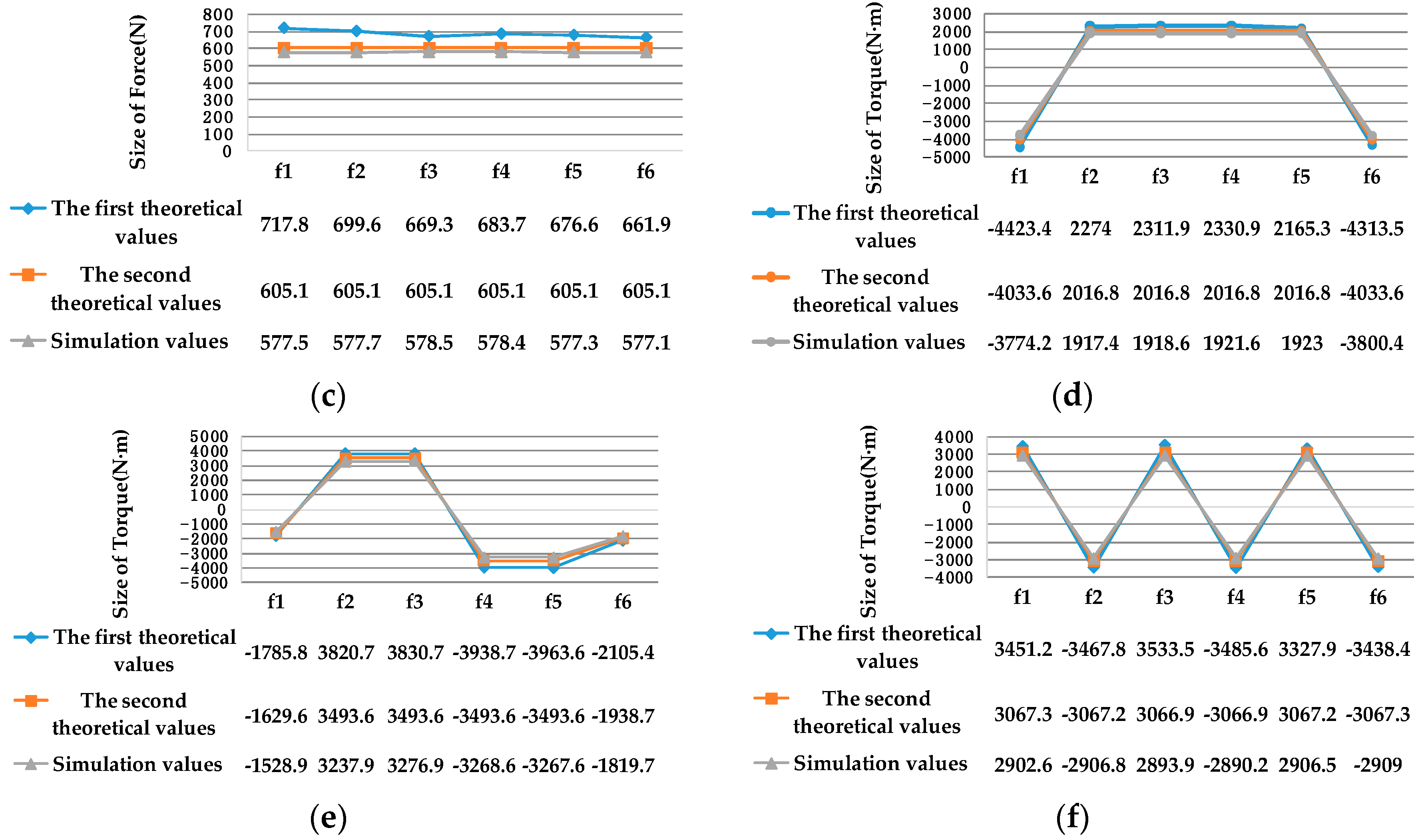
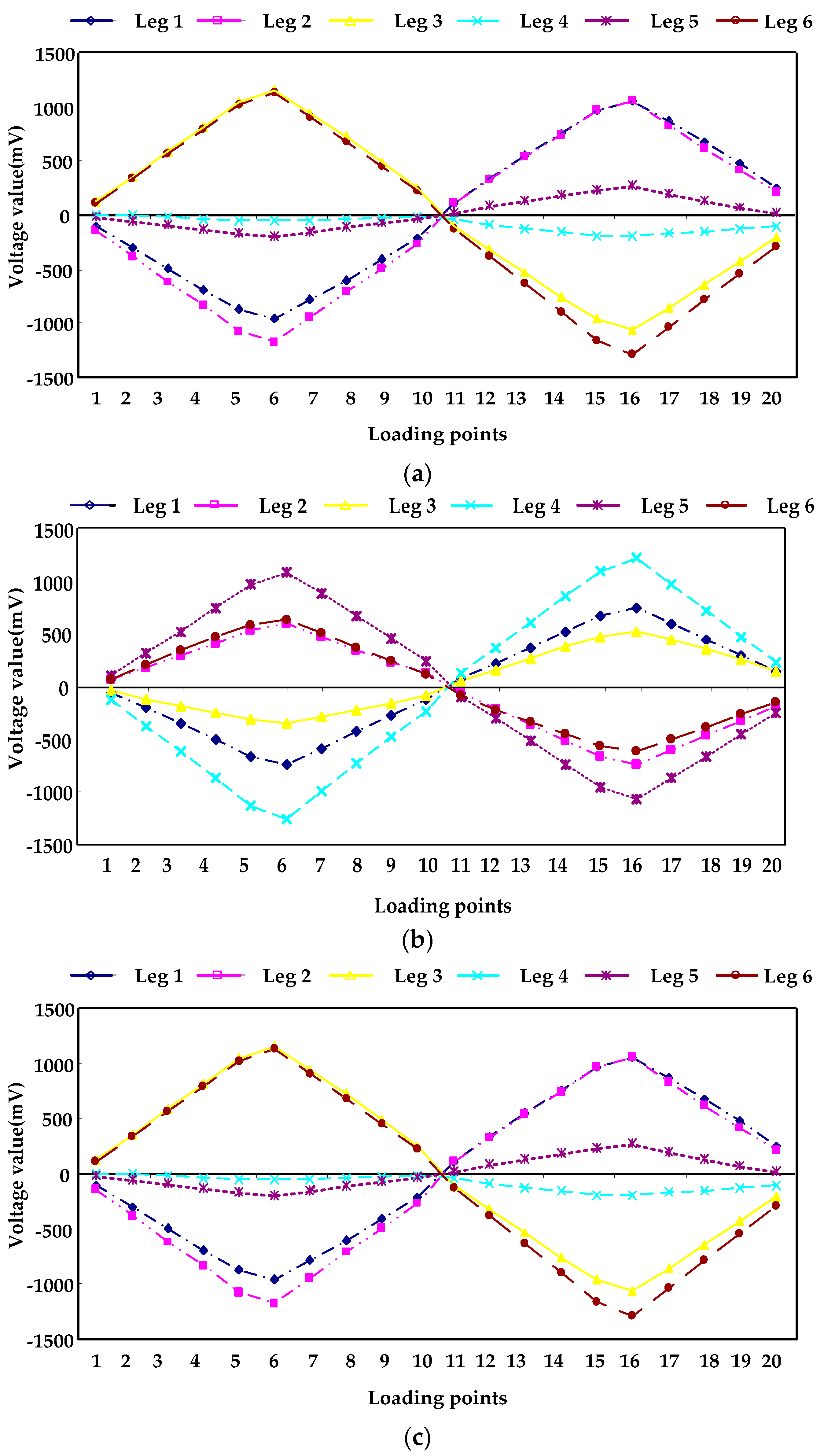
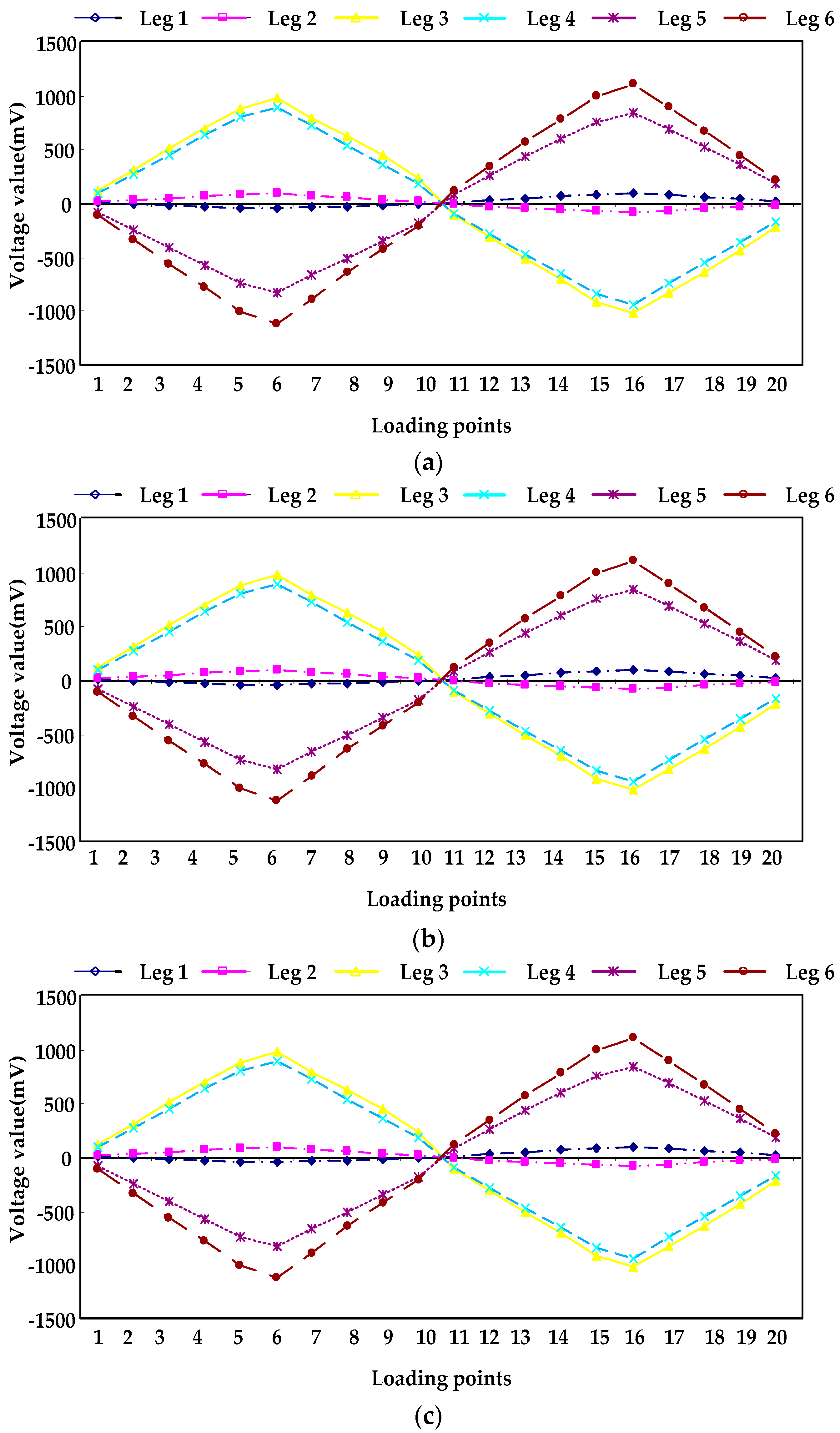
Section 5 presents the results of the experiment. The paper is concluded in
Section 6, summarizing the work that has been done.
2. Sensor Structure
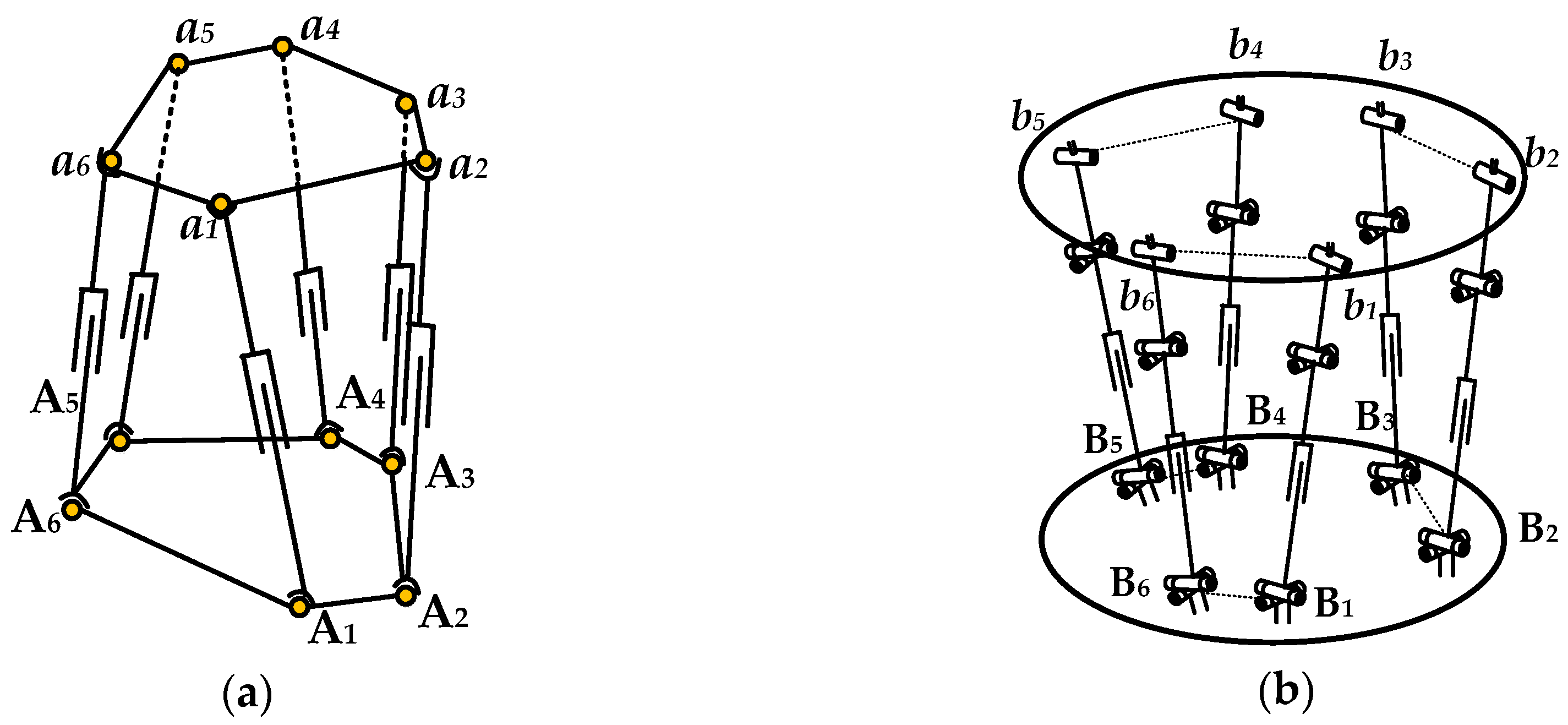
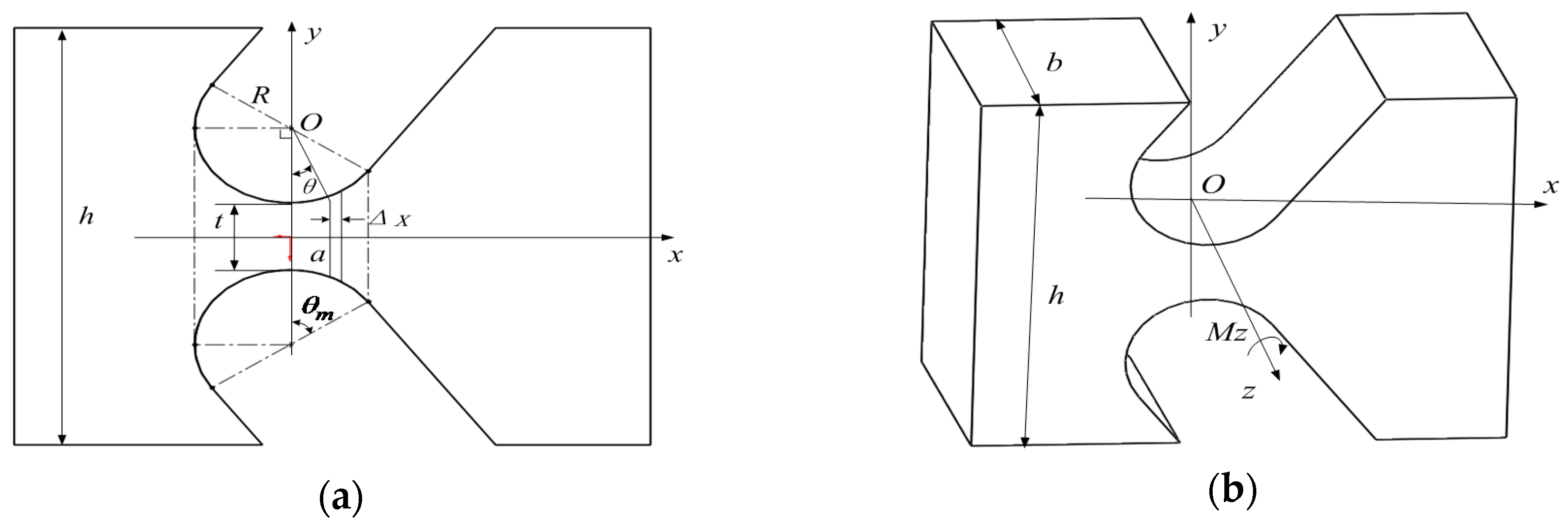
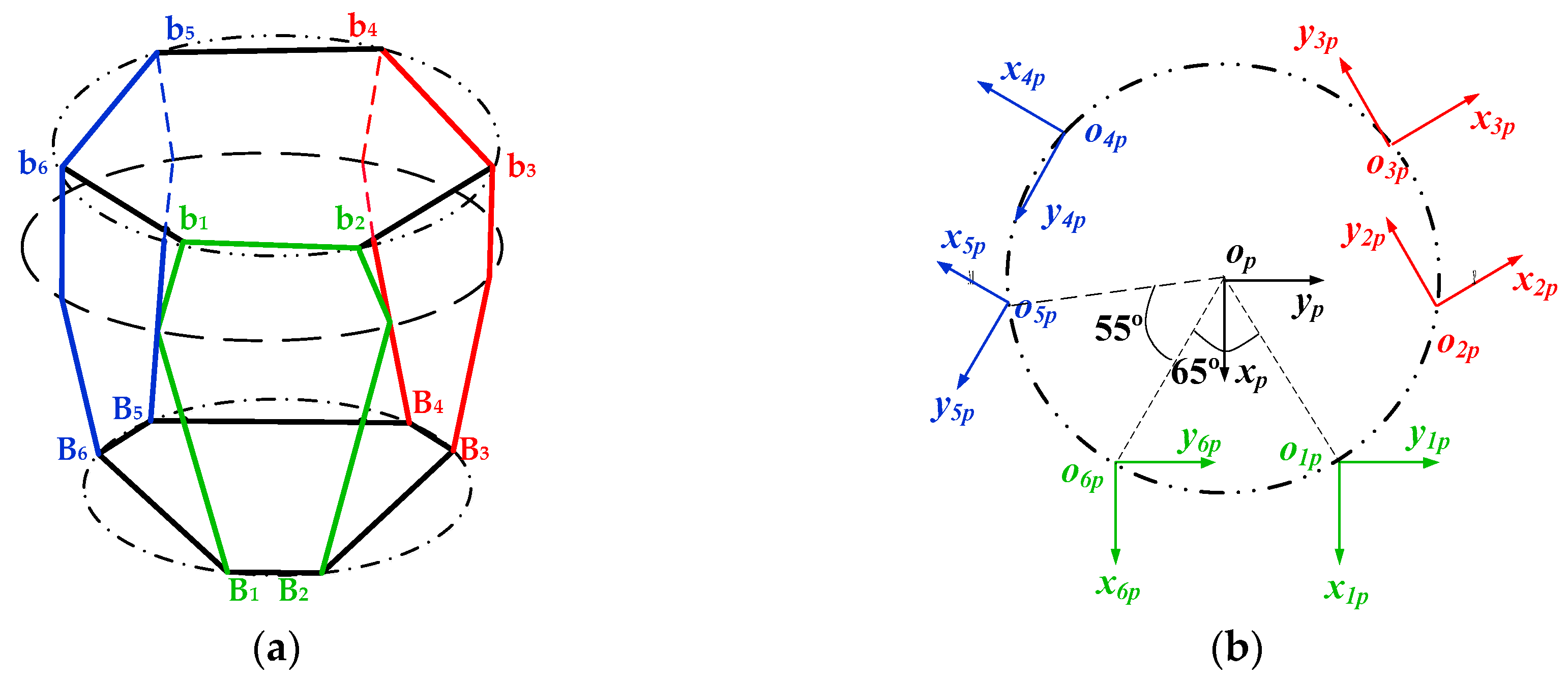
Figure 1a illustrates the traditional parallel sensor diagram, which is based on the Stewart platform and composed of a measuring platform, a lower fixed platform and six elastic legs connecting the two platforms with traditional spherical joints.
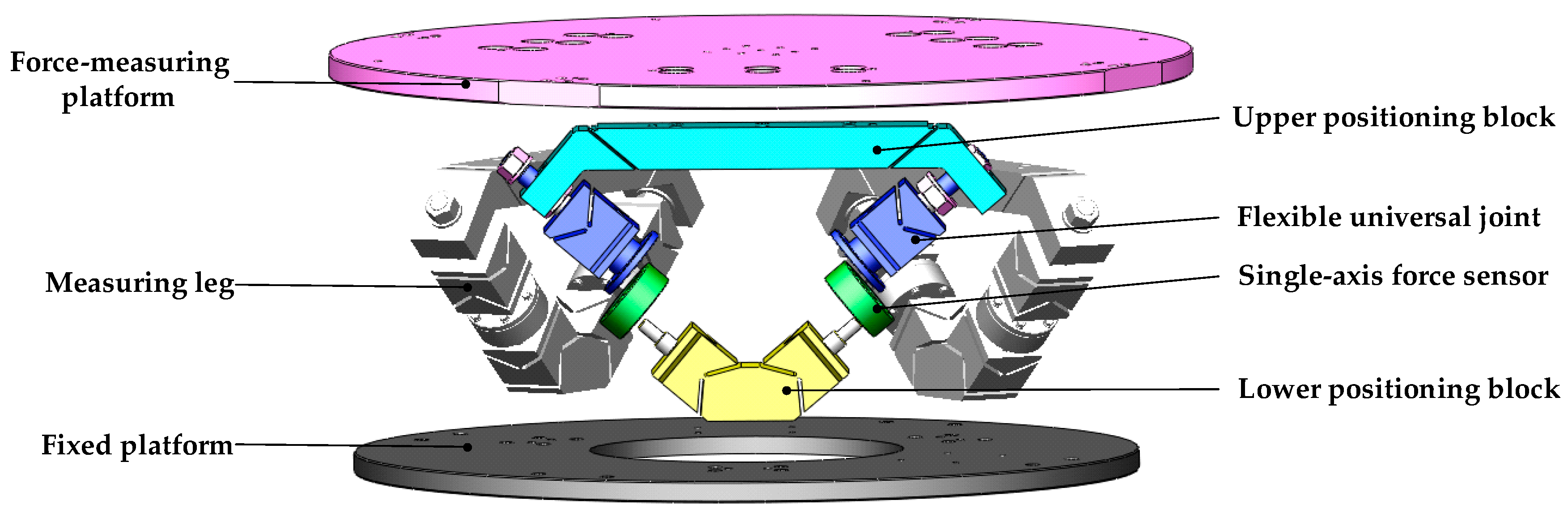
Considering the traditional spherical joints are difficult to processed into flexible joints in a large measurement range situation, and the measurement accuracy will be affected, which restricts its application in six-axis force sensors based on flexible parallel mechanism, this paper proposes a kind of structure model of six-axis force sensor based on a parallel 6-UPUR mechanism. As shown in
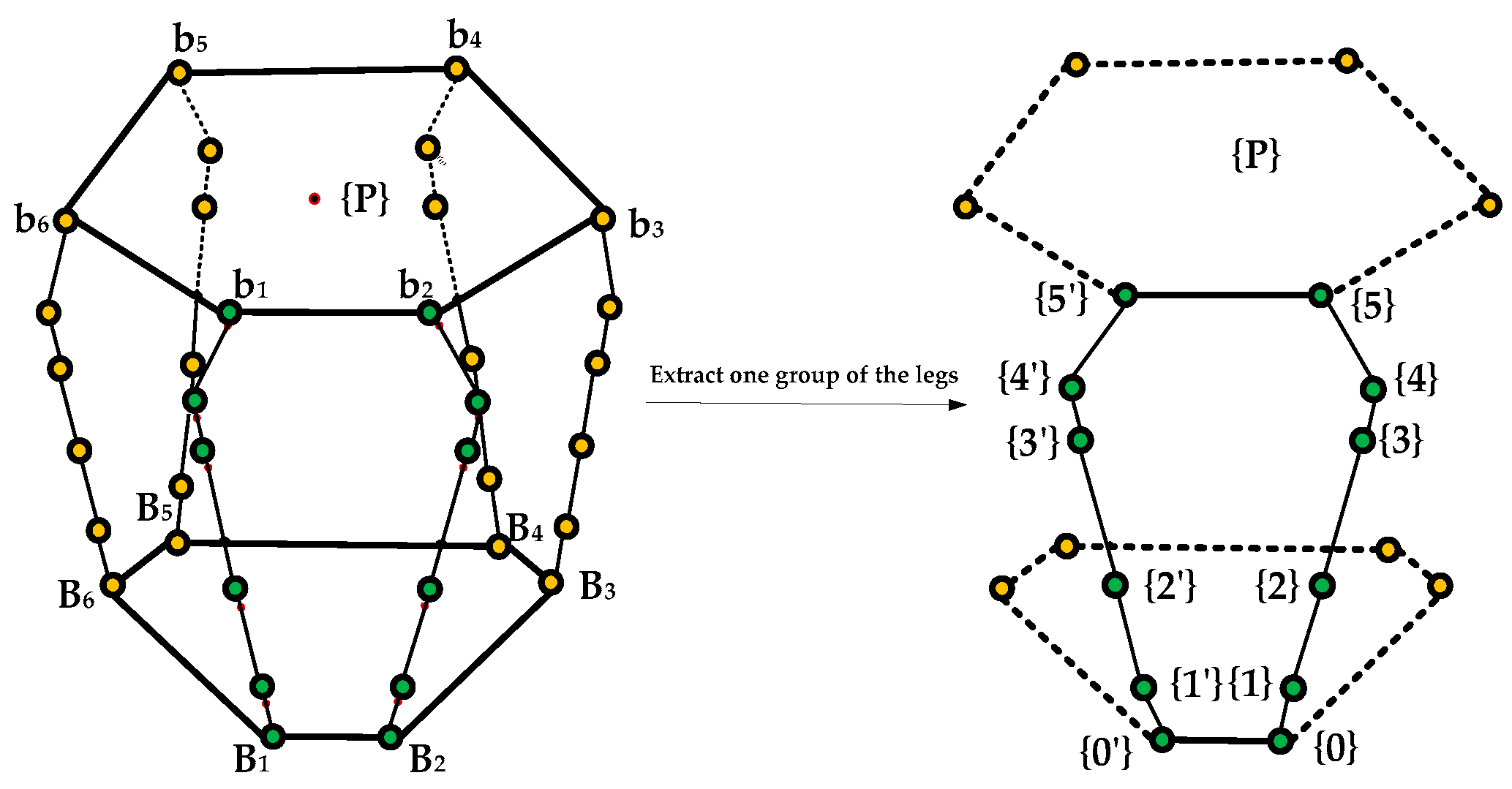
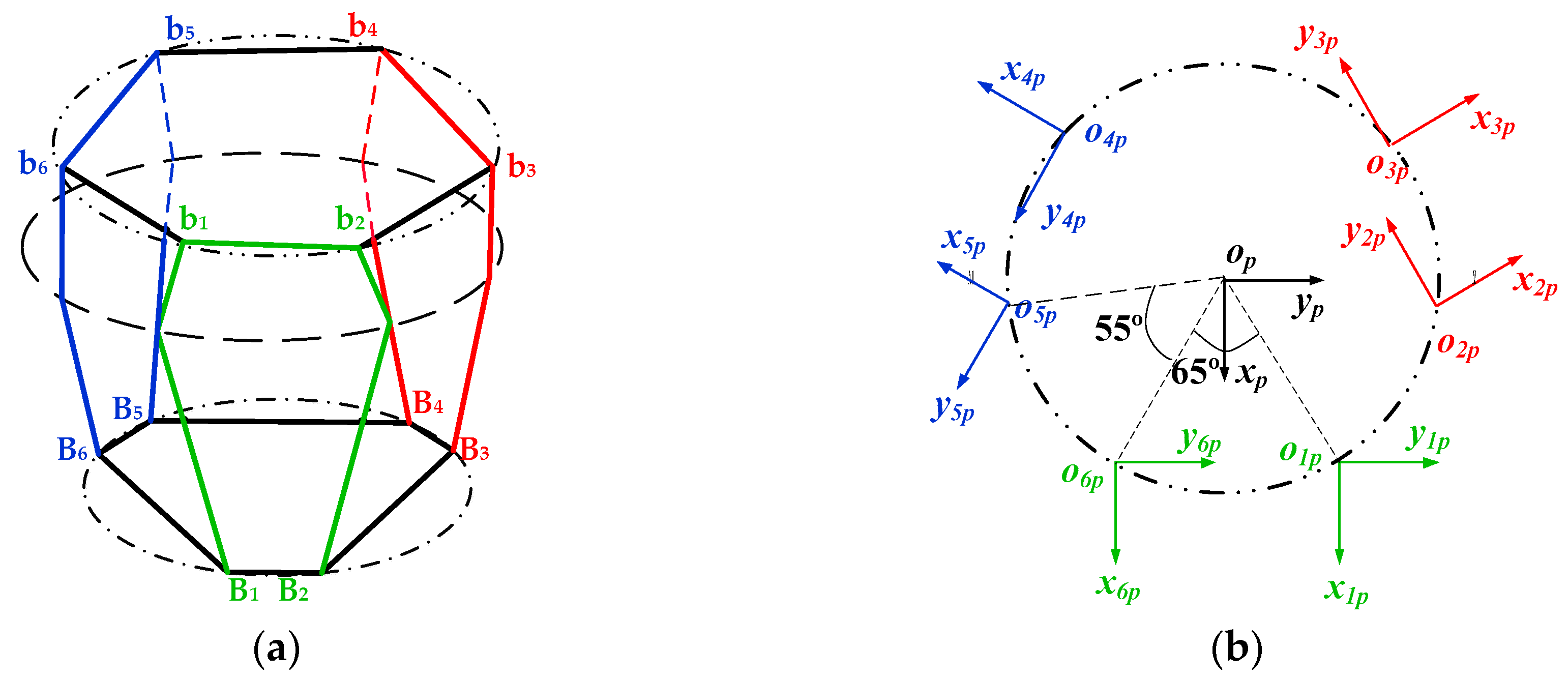
Figure 1b, it consists of a measuring platform, a fixed platform and six measuring legs divided into three groups of legs and two legs in each group are located in a vertical plane. Each measuring leg contains a single-axis force sensor and connects the fixed platform with flexible universal joint, and connects the measuring platform with combined spherical joint. Through the improvement of the traditional Stewart platform mechanism, and the introduction of flexible joints which have the peculiarities of non-clearance, friction-less and high sensitivity to replace the traditional spherical joints, it is possible to develop a sensor with a large measurement range.
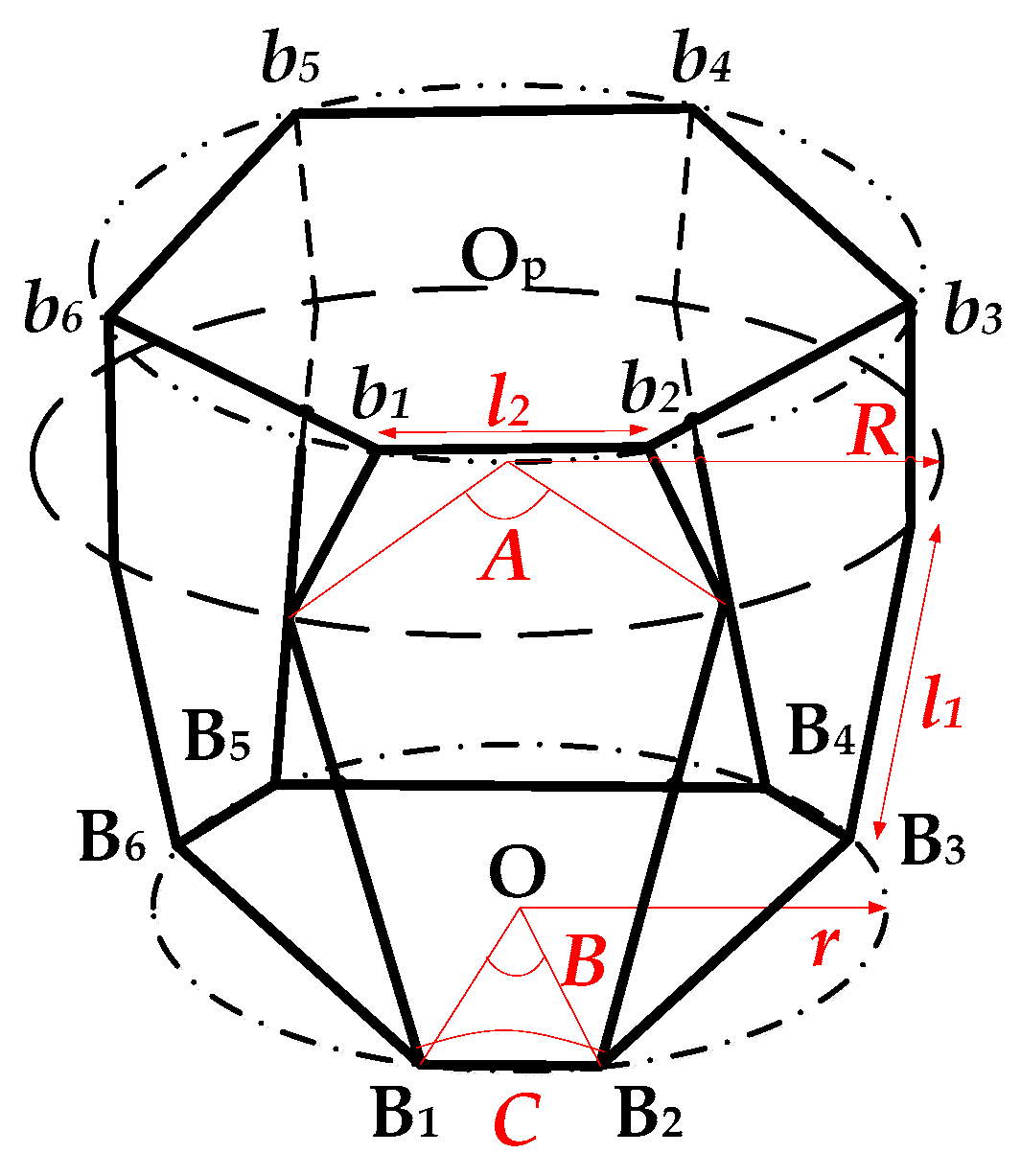
The characteristic parameters of the parallel 6-UPUR six-axis force sensor include radius
R of the measuring platform, radius
r of the lower platform, the positioning angle
A,
B,
C, the center distance
l1 of the U joint and location center distance
l2 of the R joint, as shown in
Figure 2.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}