
INS/GNSS Tightly-Coupled Integration Using Quaternion-Based AUPF for USV

Abstract
:1. Introduction
2. Sensor Measurement Simulation
2.1. Trajectory Simulator of the USV
2.2. GPS Date Simulation
2.3. IMU Date Simulation
3. Quaternion-Based INS/GNSS Integration
3.1. Quaternion-Based Propagration and Observation Models
3.2. Quaternion-Based Integration Using UPF
3.3. Residual-Based AUPF
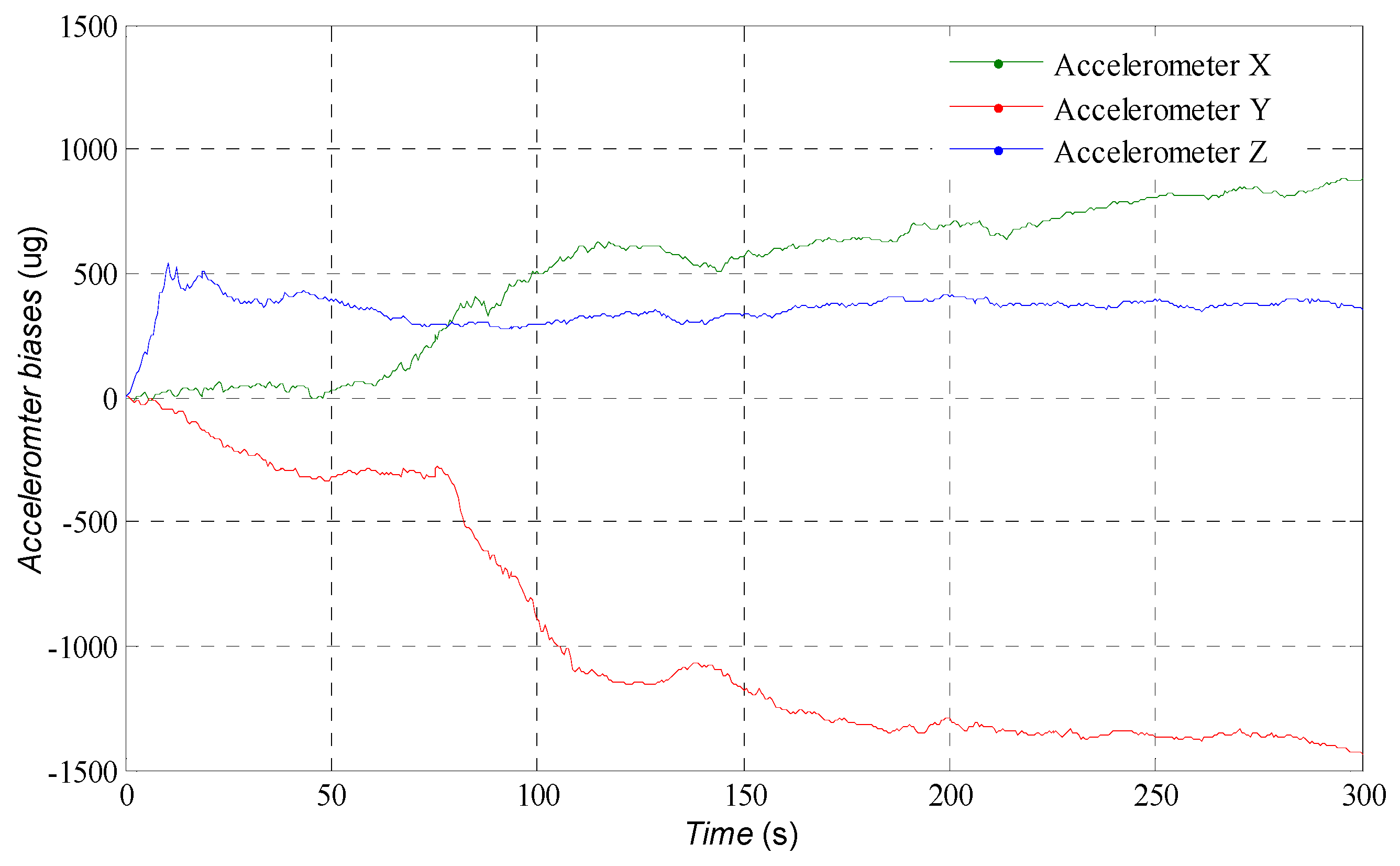
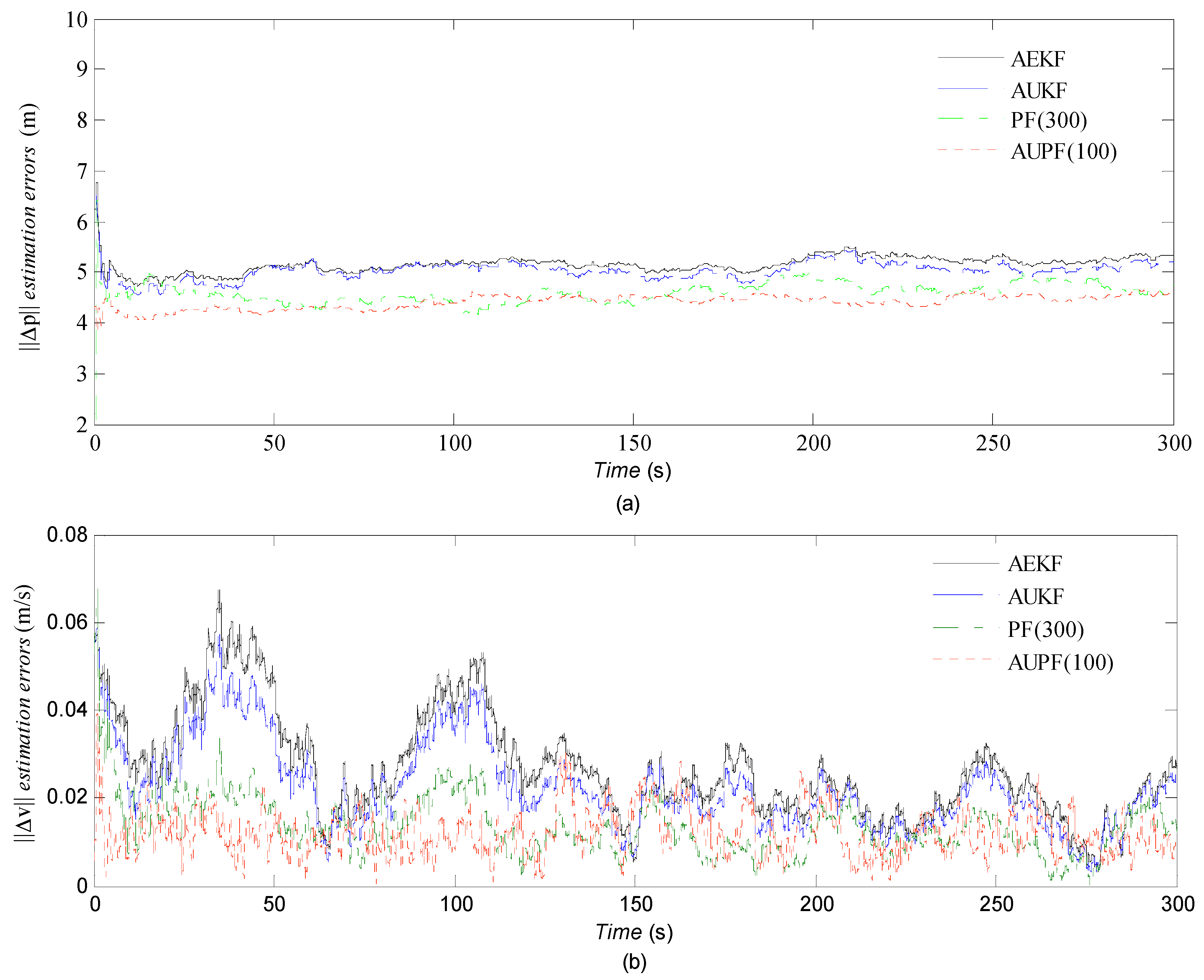
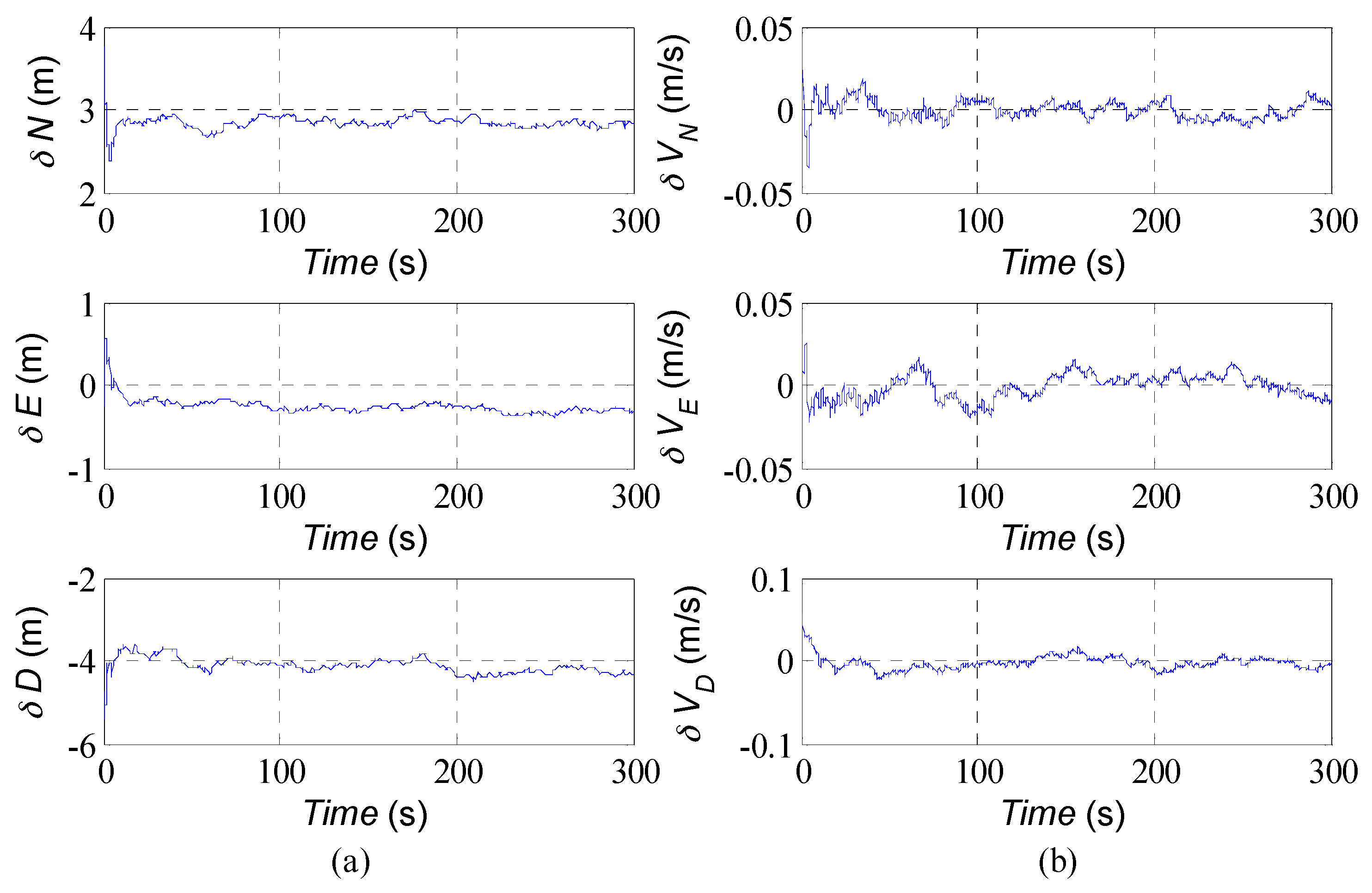
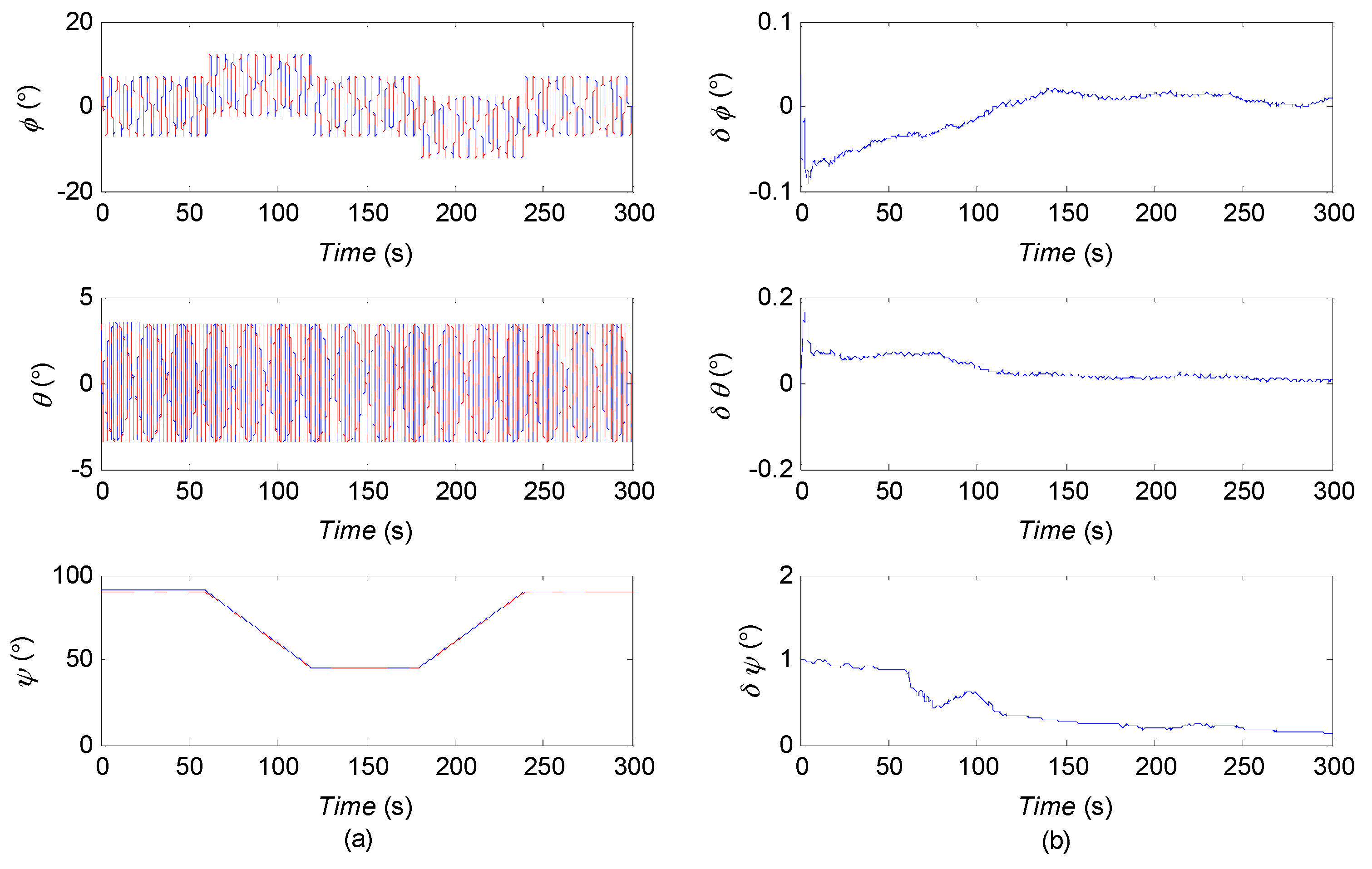
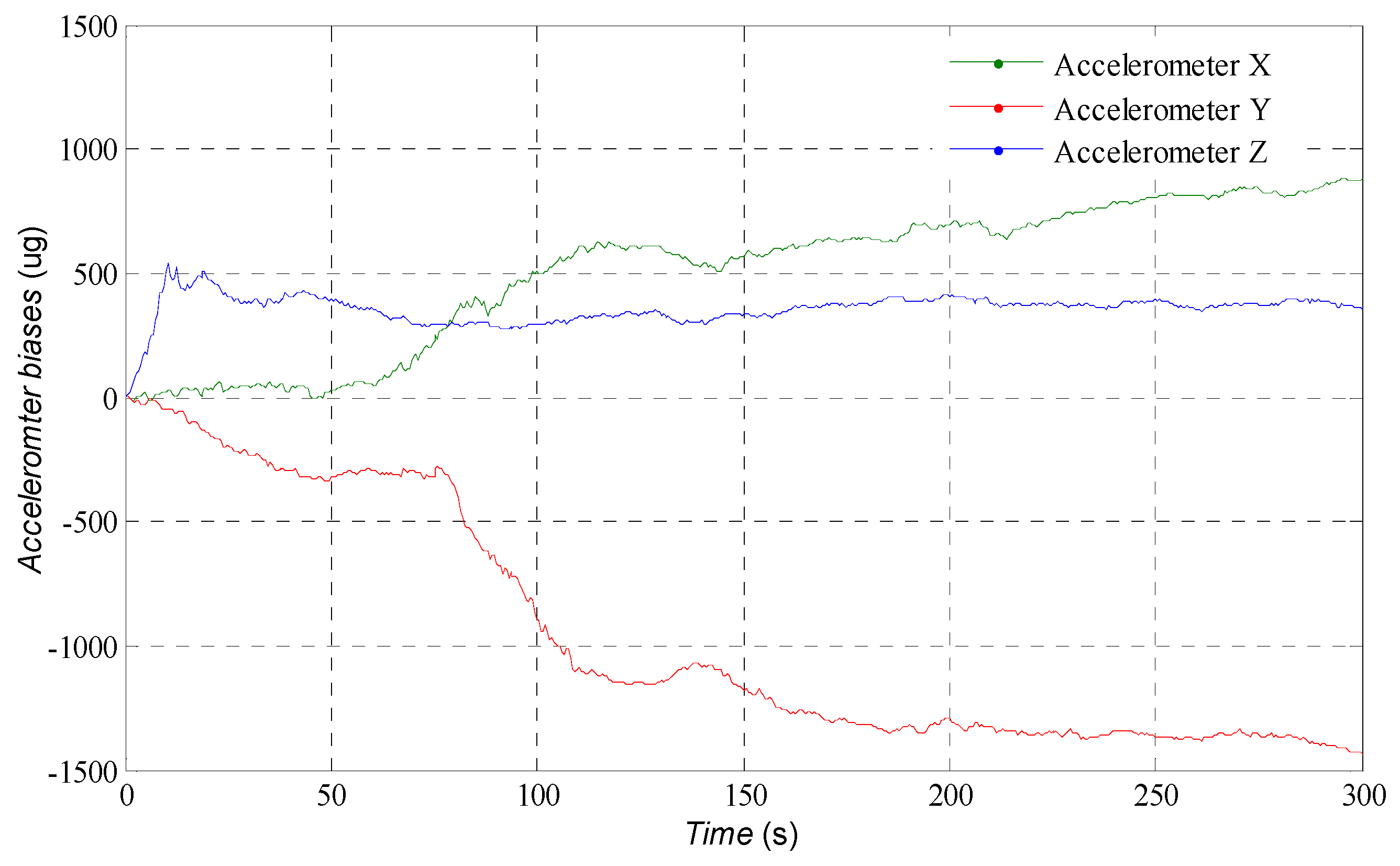
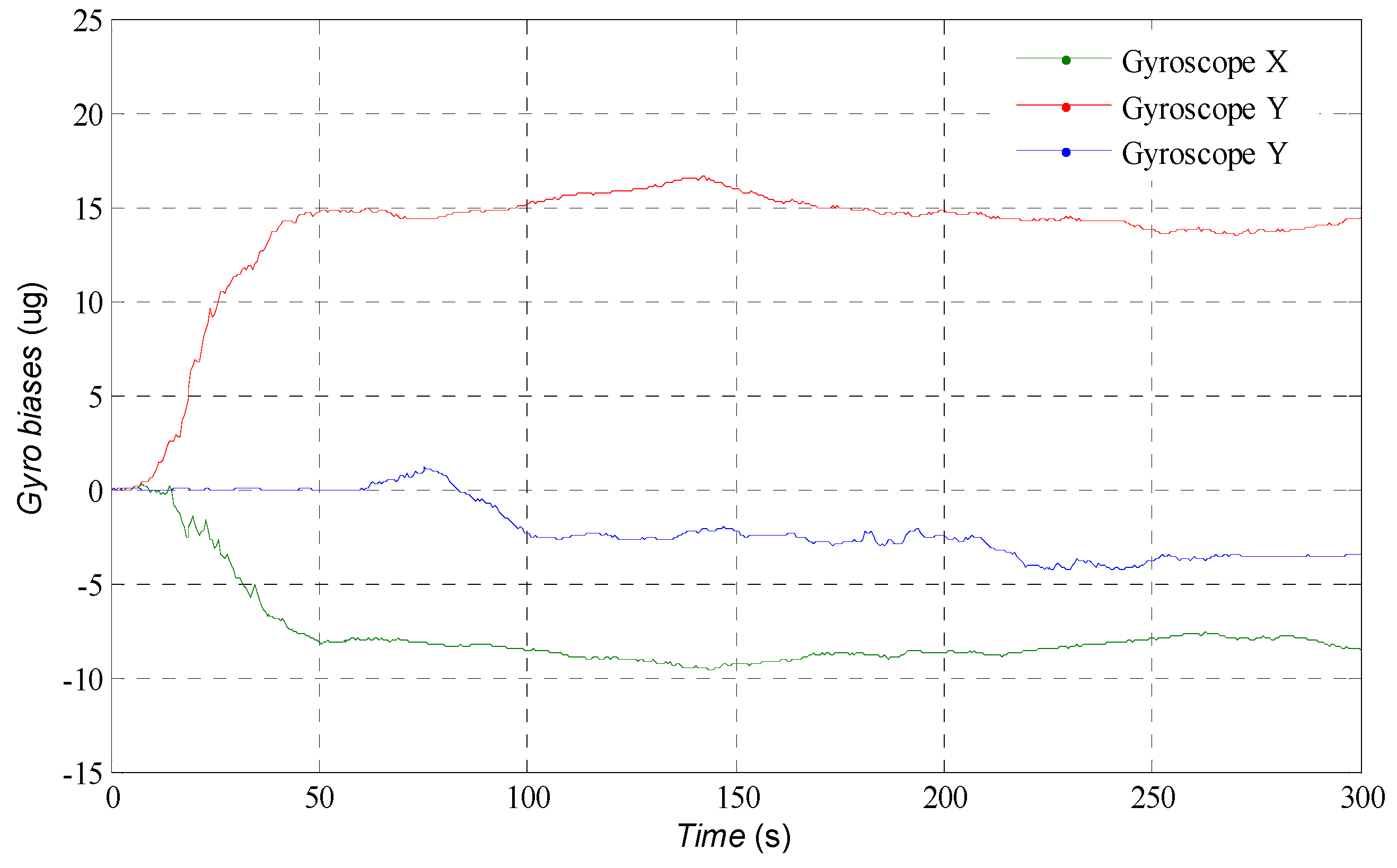
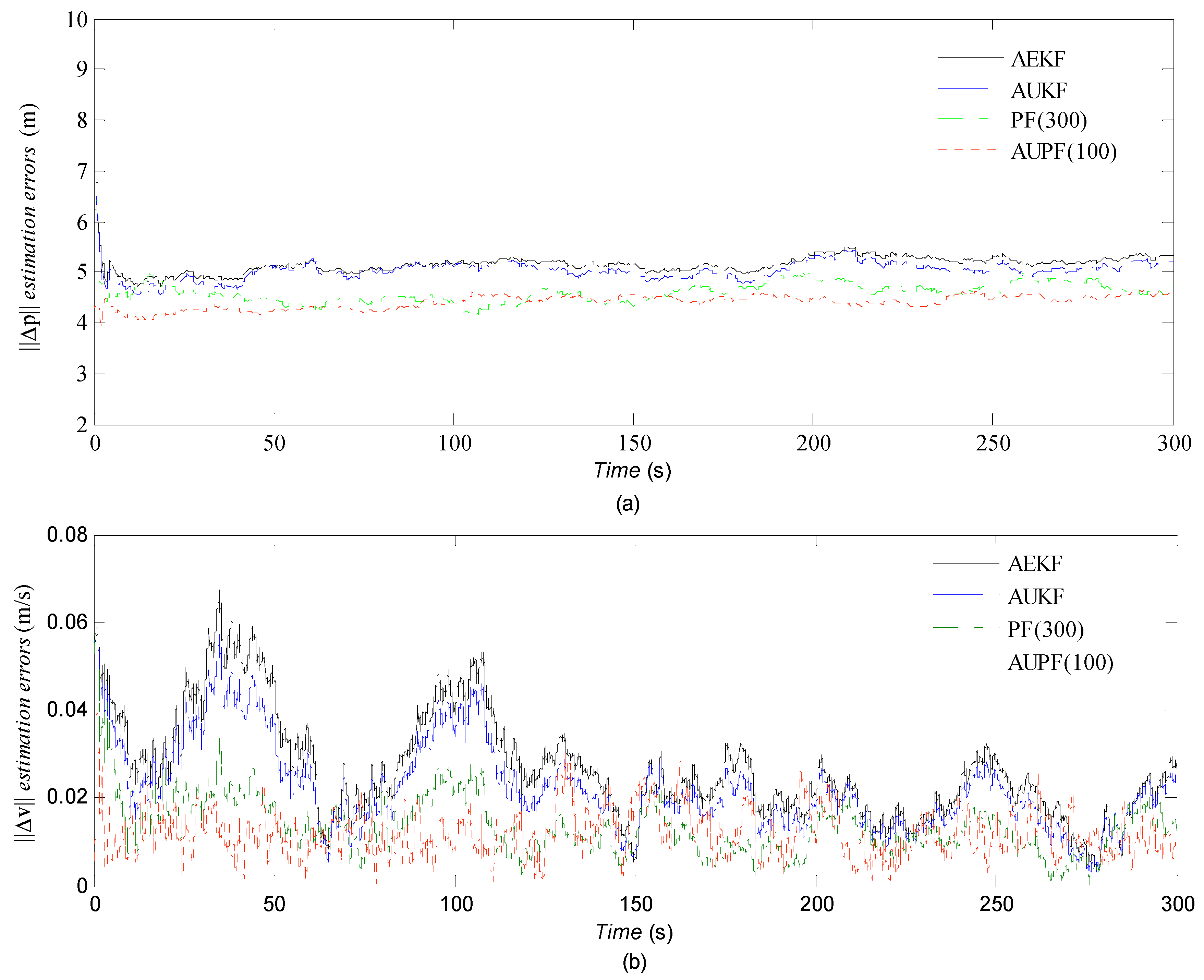
4. Simulation Results
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Manley, J.E. Unmanned surface vehicles, 15 years of development. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–4.
- Pourtakdoust, S.H.; Ghanbarpour, A.H. An adaptive unscented Kalman filter for quaternion-based orientation estimation in low-cost AHRS. Aircr. Eng. Aerosp. Technol. 2007, 79, 485–493. [Google Scholar] [CrossRef]
- Zhou, J. Low-Cost MEMS-INS/GPS Integration Using Nonlinear Filtering Approaches. Ph.D. Thesis, Universitätsbibliothek der Universität Siegen, Siegen, Germany, April 2013. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech house: Boston, MA, USA, 2013. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A new approach for filtering nonlinear systems. In Proceedings of the 1995 American Control Conference, Seattle, WA, USA, 21–23 June 1995; pp. 1628–1632.
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Haug, A.J. A Tutorial on Bayesian Estimation and Tracking Techniques Applicable to Nonlinear and Non-Gaussian Processes; MITRE Corporation: McLean, VA, USA, 2005. [Google Scholar]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Fossen, T.I. Nonlinear Modelling and Control of Underwater Vehicles. Ph.D. Thesis, Faculty of Information Technology, Norwegian University of Science and Technology, Trondheim, Norway, 1991. [Google Scholar]
- Xia, G.; Wang, G.; Chen, X.; Zhao, A.; Pang, C. DRFNN adaptive observer based sliding mode tracking control of an underactuated surface vehicle. Mechatronics and Automation. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 2255–2260.
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements and Performance, 2nd ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2006. [Google Scholar]
- Bhatti, U.I. Improved Integrity Algorithms for Integrated GPS/INS Systems in the Presence of Slowly Growing Errors. Ph.D. Thesis, Department of Civil and Environmental Engineering, Imperial College London, London, UK, March 2007. [Google Scholar]
- Hide, C.; Moore, T.; Smith, M. Adaptive Kalman filtering algorithms for integrating GPS and low cost INS. In Proceedings of the Position Location and Navigation Symposium (PLANS 2004), Monterey, CA, USA, 26–29 April 2004; pp. 227–233.
- Hide, C.; Moore, T.; Smith, M. Adaptive Kalman filtering for low-cost INS/GPS. J. Navig. 2003, 56, 143–152. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gyroscope (Angular Rates) | Accelerometer (Specific Forces) | ||
|---|---|---|---|
| Bias in-run Stability | ≦±13 [°/h] (1σ) | Bias in-run Stability | ≦±1300 [μg] (1σ) |
| Noise (ARW) | 0.028 [°/s/√Hz] (1σ) | Noise (VRW) | 70 [μg/√Hz] (1σ) |
| Scale Factor Error | <1000 [ppm] | Scale Factor Error | <1000 [ppm] |
| Algorithm | Runs | M(‖Δp‖) [m] | V(‖Δp‖) [m] | M(‖Δv‖) [m/s] | V(‖Δv‖) [m/s] | Time [s] |
|---|---|---|---|---|---|---|
| AEKF | 1 | 5.2451 | 0.0426 | 0.0327 | 0.0042 | 3.3774 |
| AUKF | 1 | 5.1962 | 0.0397 | 0.0286 | 0.0037 | 17.3859 |
| PF(300) | 100 | 4.5173 | 0.0315 | 0.0207 | 0.0021 | 283.4482 |
| AUPF(100) | 100 | 4.2358 | 0.0273 | 0.0183 | 0.0014 | 62.1538 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, G.; Wang, G. INS/GNSS Tightly-Coupled Integration Using Quaternion-Based AUPF for USV. Sensors 2016, 16, 1215. https://doi.org/10.3390/s16081215
Xia G, Wang G. INS/GNSS Tightly-Coupled Integration Using Quaternion-Based AUPF for USV. Sensors. 2016; 16(8):1215. https://doi.org/10.3390/s16081215
Chicago/Turabian StyleXia, Guoqing, and Guoqing Wang. 2016. "INS/GNSS Tightly-Coupled Integration Using Quaternion-Based AUPF for USV" Sensors 16, no. 8: 1215. https://doi.org/10.3390/s16081215
APA StyleXia, G., & Wang, G. (2016). INS/GNSS Tightly-Coupled Integration Using Quaternion-Based AUPF for USV. Sensors, 16(8), 1215. https://doi.org/10.3390/s16081215