
Fiber-Optic Surface Temperature Sensor Based on Modal Interference


Abstract
:1. Introduction
2. Fiber Optic Intermodal Interferometer
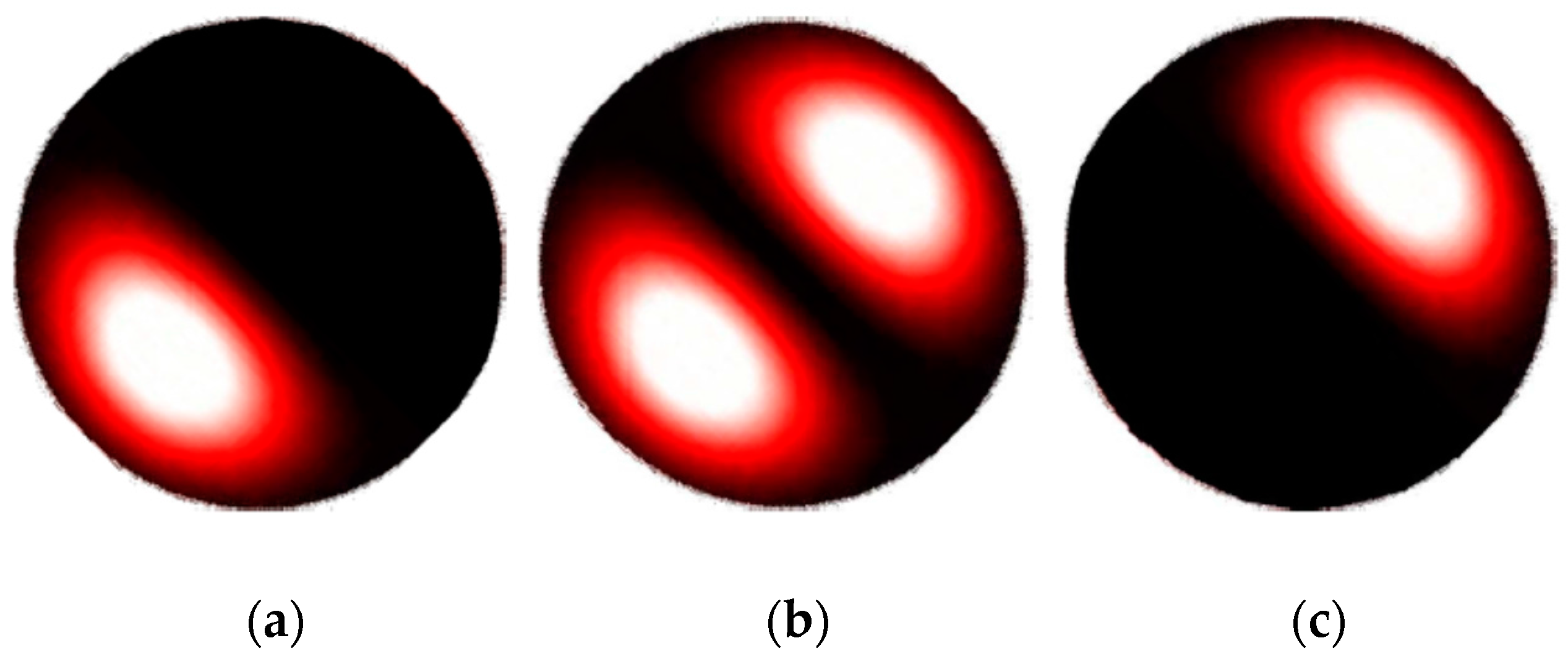
2.1. Basic Principle
2.2. Heating-Cooling Phase Discrimination
- A longitudinal stress stretching the fiber layers on the outside of the bend and compressing the layers on the inner side. This perturbation cannot induce coupling between modes of the same order.
- A compressive stress from the outer layers on the inner ones. This perturbation produces the same effect as birefringence: a detuning of the even and odd modes along the bend inducing a dephasing between modes.
3. Integrated Surface Temperature Sensing with Fiber Optic
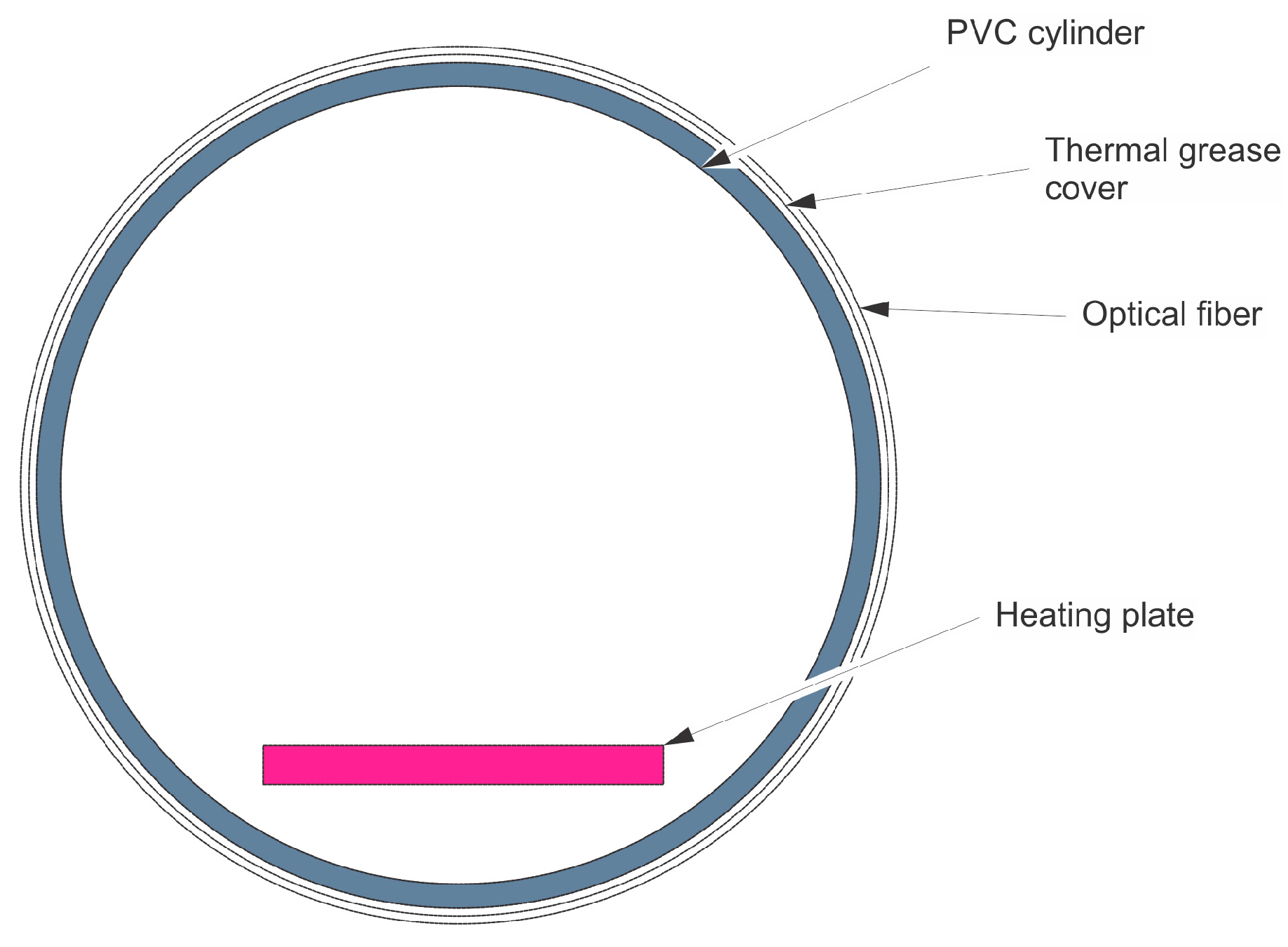
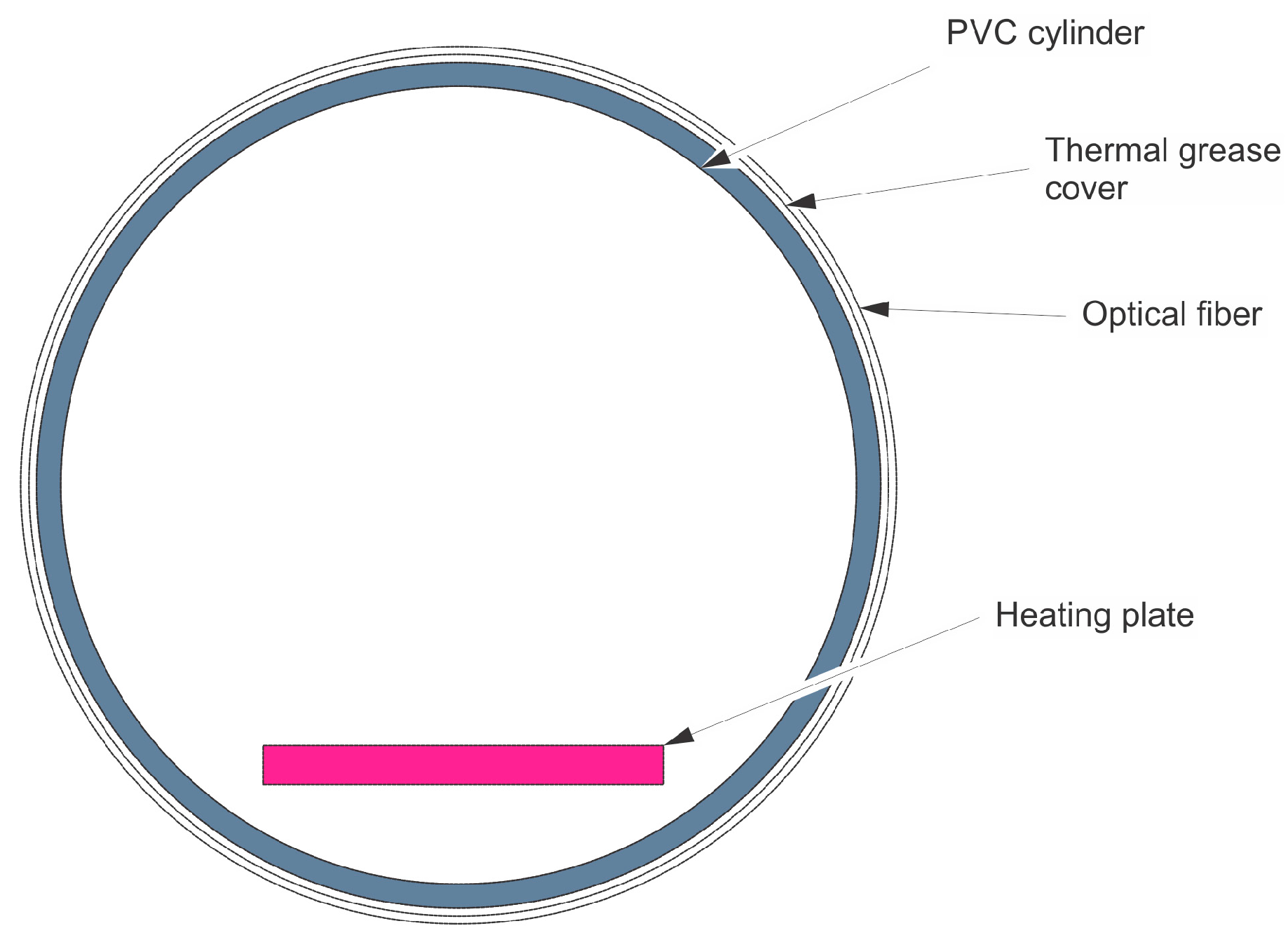
- In order to minimize immersion errors, the sensor is immersed in the boundary layer between the object being tested and its environment as closely as possible to the surface. Ideally, the sensor should be placed along an isotherm line due to the fact that the temperature needs to be constant along its sensing part, in order to avoid spatial averaging errors. With conventional surface probes, the immersion errors will be harnessed thanks to the tight fastening of the sensors to the cylinder, the use of a heat conducting grease for better contact with the surface and, if possible, a thermal insulation of the system and sensor. This insulation keeps the sensor at a temperature as close as possible to that of the object being studied. This is not always possible, due to constraints imposed by the process or environmental conditions (for example, high temperatures).
- In order to minimize heat capacity errors, the sensor must have the lowest possible heat capacity in relation to the heat capacity of the system being monitored. This is due to the fact that the sensor needs to acquire heat from the system, in order to reach the thermal equilibrium before a correct measurement can be taken.
- Even if the heat capacity of the sensor is low compared with that of the system, it will take some time for the sensor to heat due to its thermal inertia (settling time response). This phenomenon is usually quantified by a time constant. Most probes and assemblies have a time constant, which increases by the square of their diameter [25]. Lag error is another consequence of the settling time response. When the temperature of the system changes too quickly, equilibrium is never achieved with the sensor. This type of error will be harnessed by limiting the temperature change rate and using the smallest possible sensors.
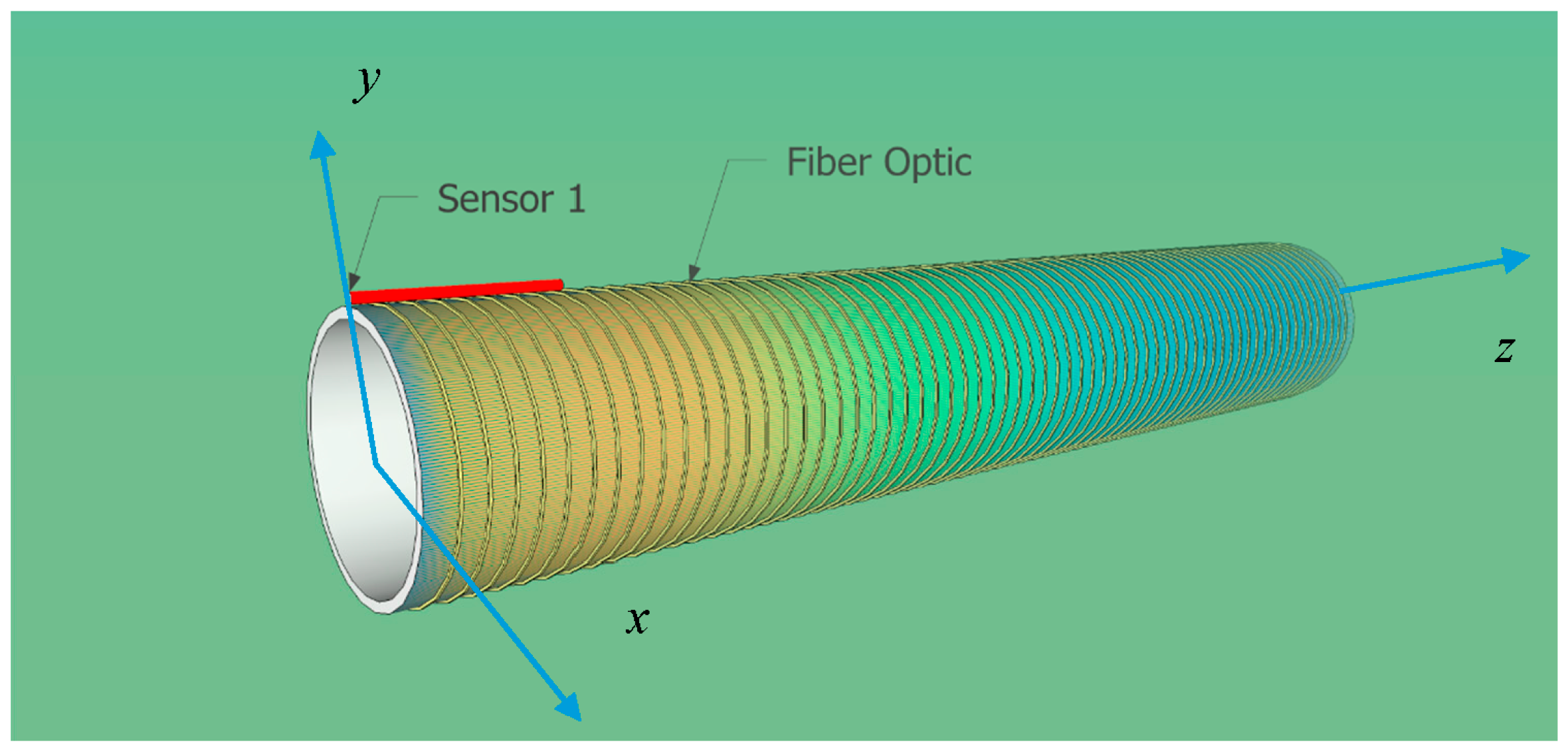
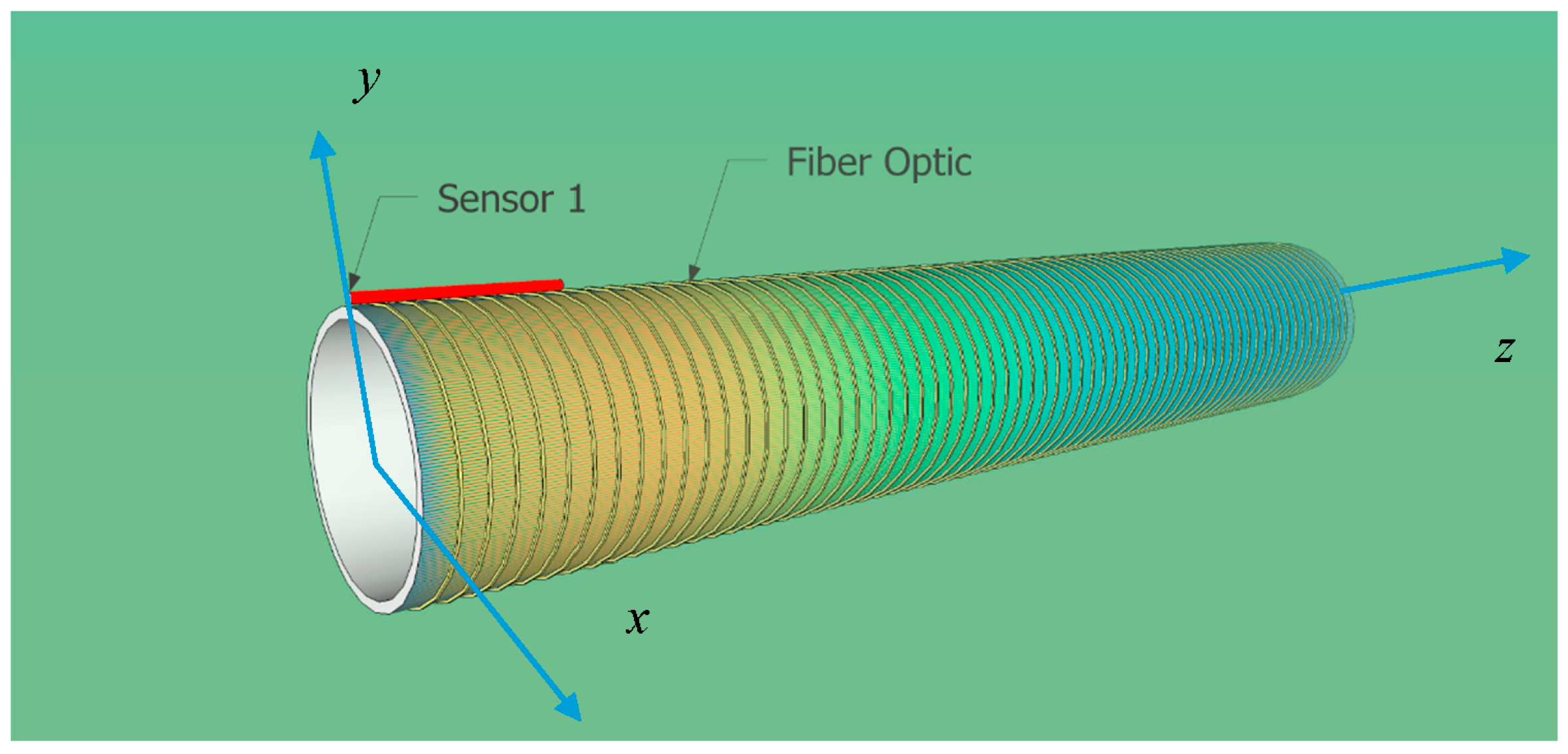
- The fiber is laid on the whole surface of the object so that its temperature is as close as possible to that of the monitored object, with minimal disturbance of the thermal equilibrium between the object and its environment. Thermal grease between the object and the fiber helps to reach this target.
- The fiber is attached in such a way that the thermal expansion or contraction of the observed object does not induce strain effect on the fiber. This condition is achieved thanks to an interlayer between the fiber and the object. Again, thermal grease between the object and the fiber is used.
- The spatial gradient of the temperature of the monitored surface (in K/m) multiplied by the inter-distance between two adjacent sections of the monitored fiber (in m) is several times lower than the required temperature accuracy (in K).
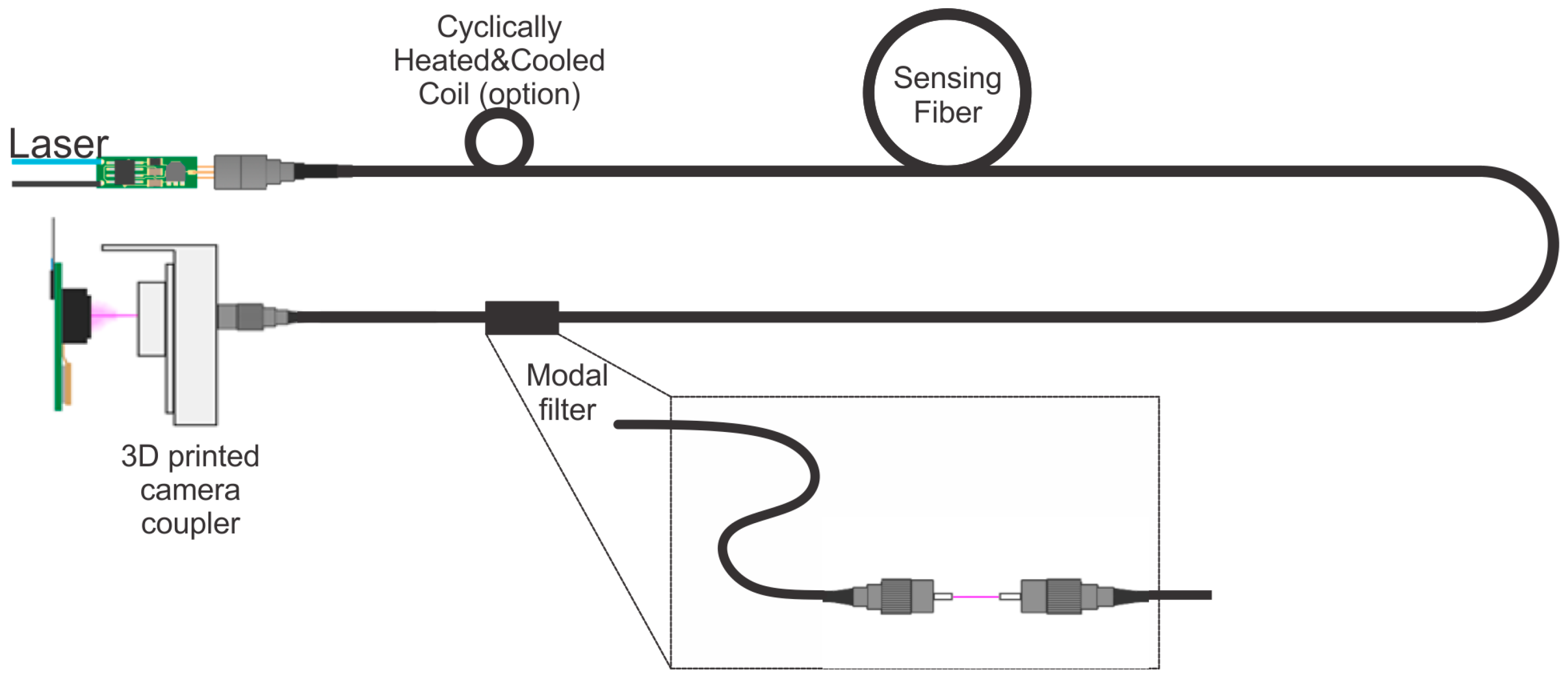
4. Surface Temperature Experimental Setup
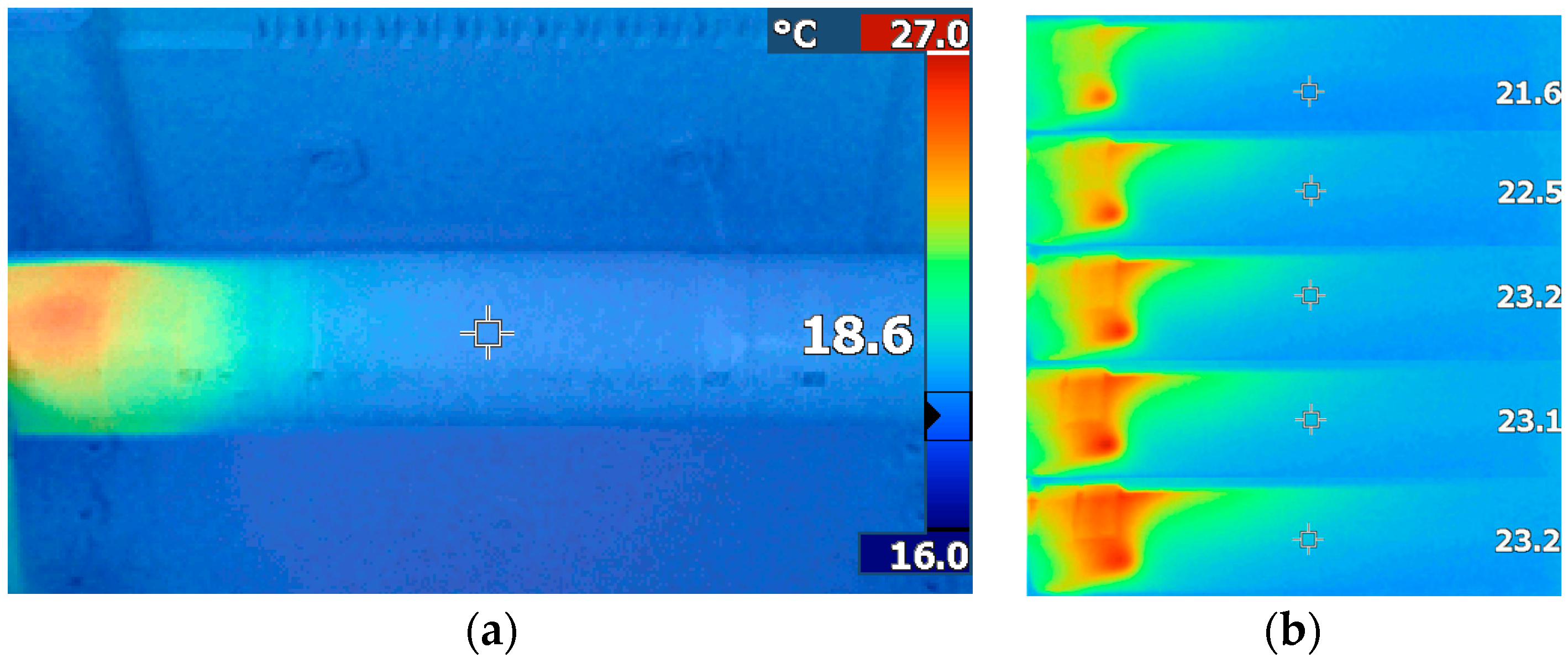
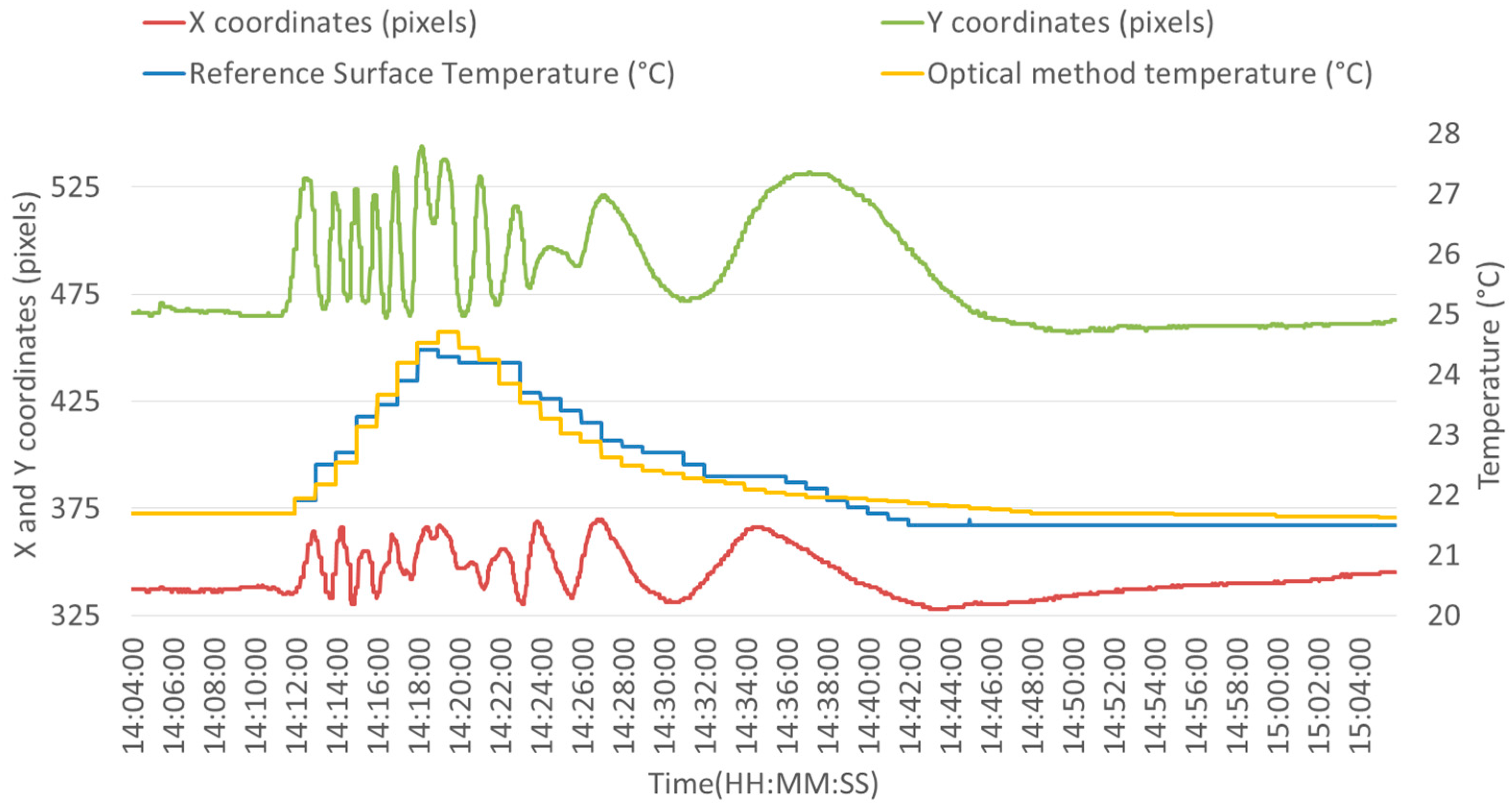
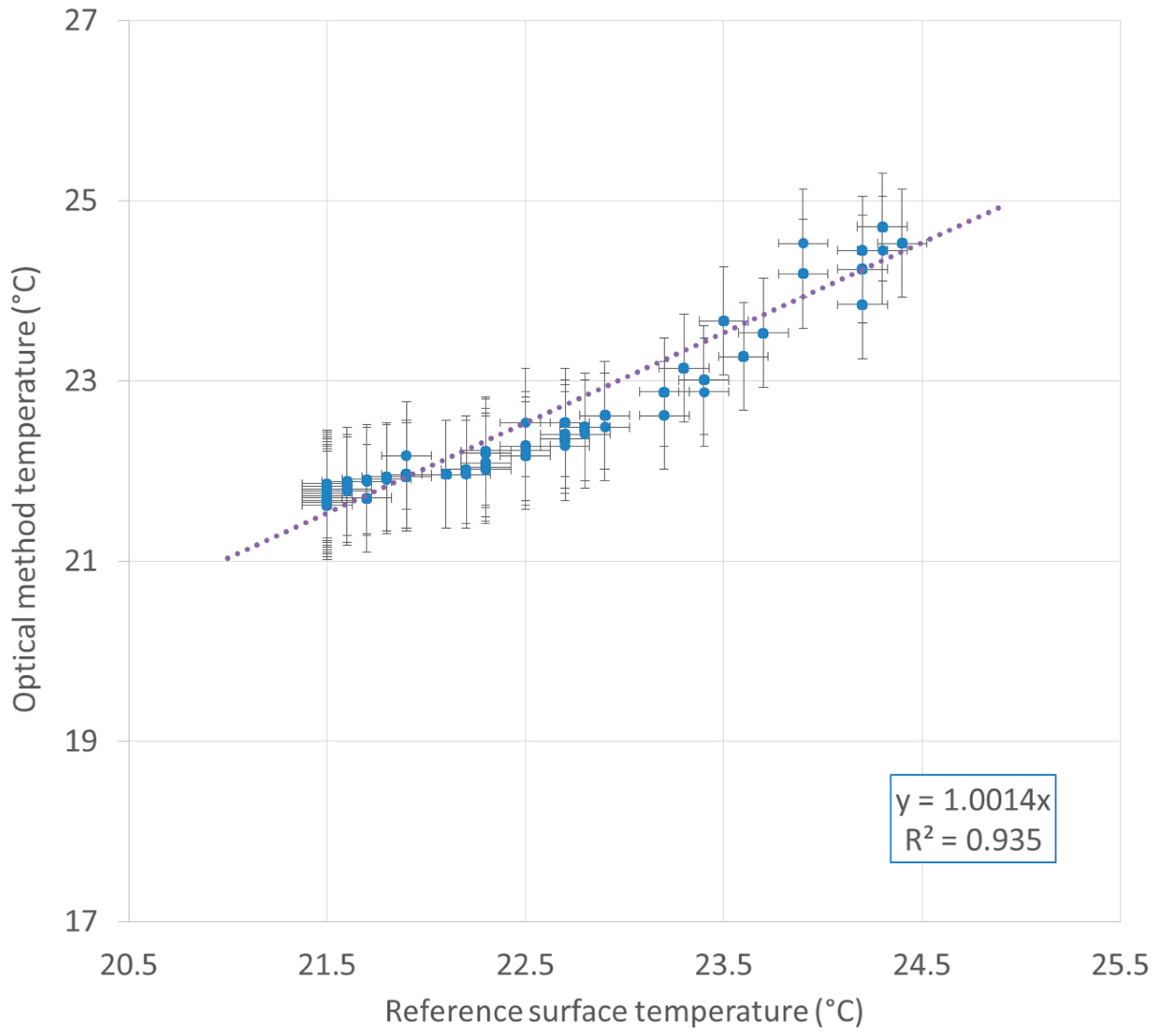
5. Results
6. Materials and Methods
- Selecting a few-mode optical fiber.
- Lighting one end of this optical fiber using a coherent light source.
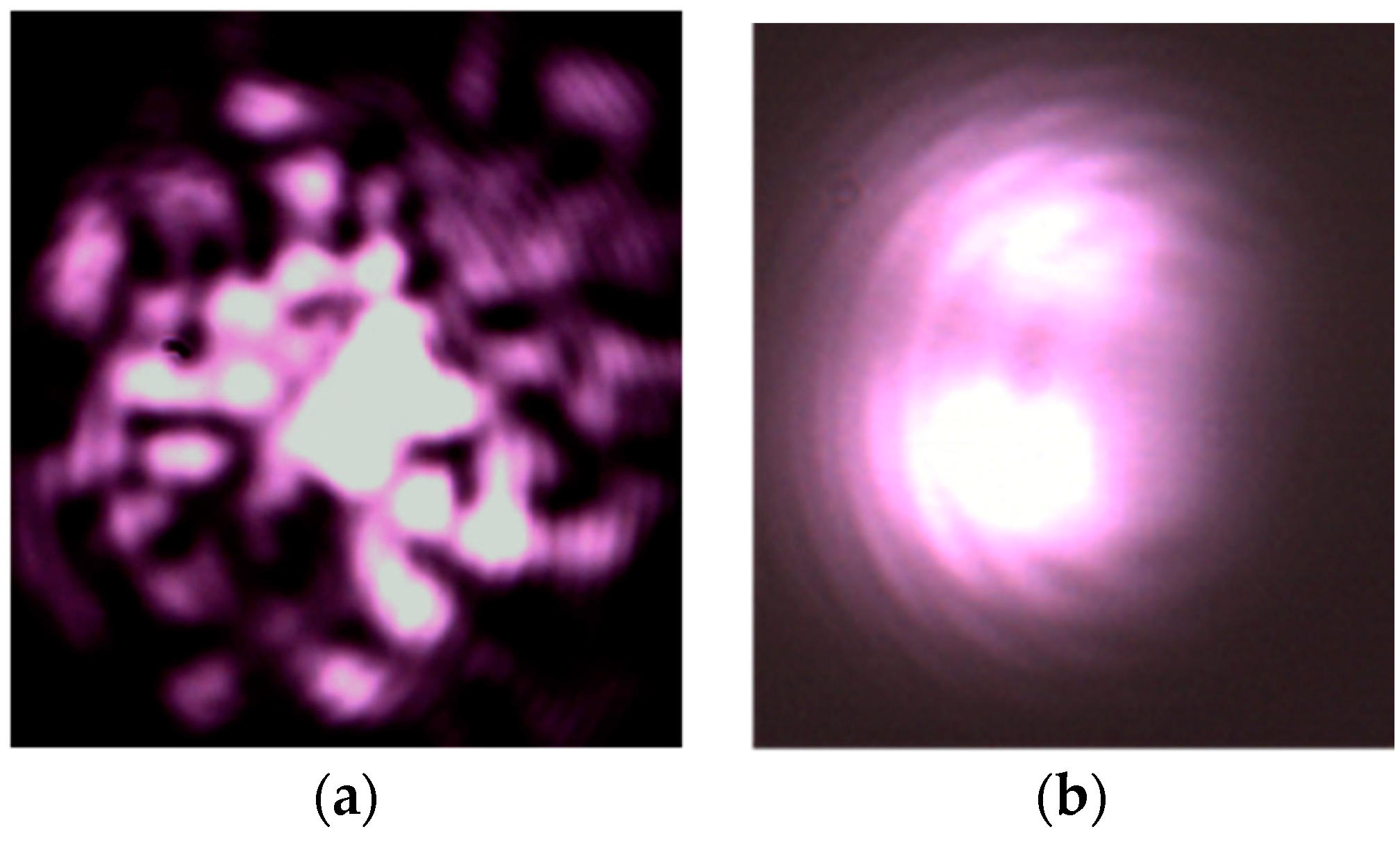
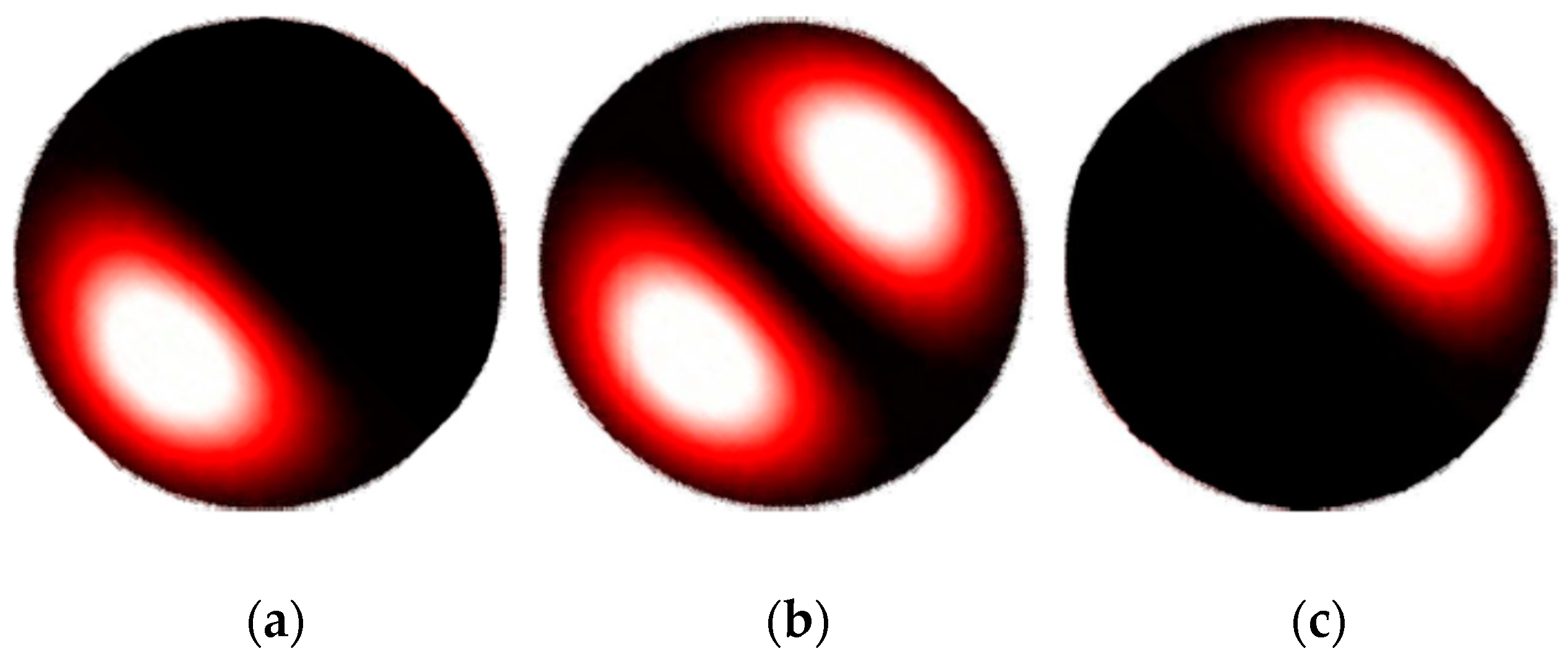
- Determining the interference pattern of coherent light at the other end of the optical fiber.
- Selecting the maximum intensity at the other end of the optical fiber by spatially filtering the lighting used on the optical fiber.
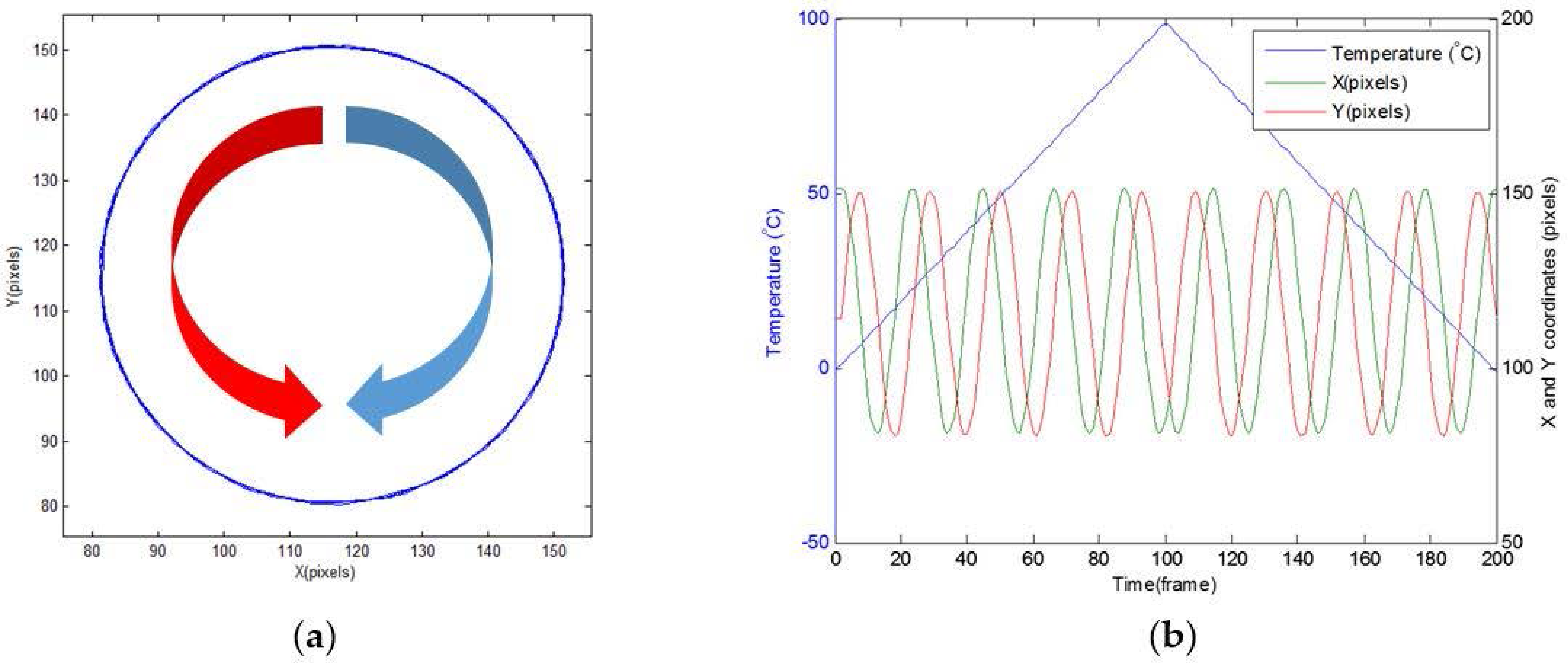
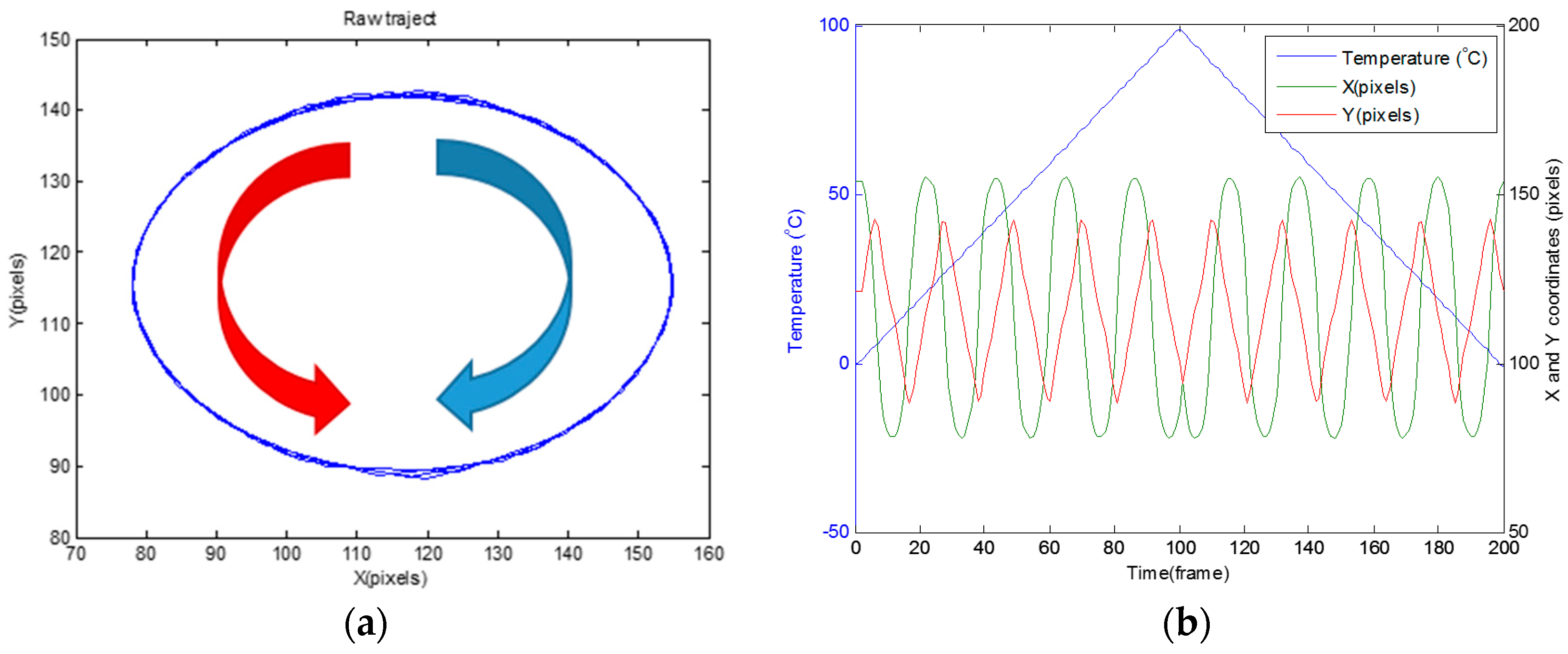
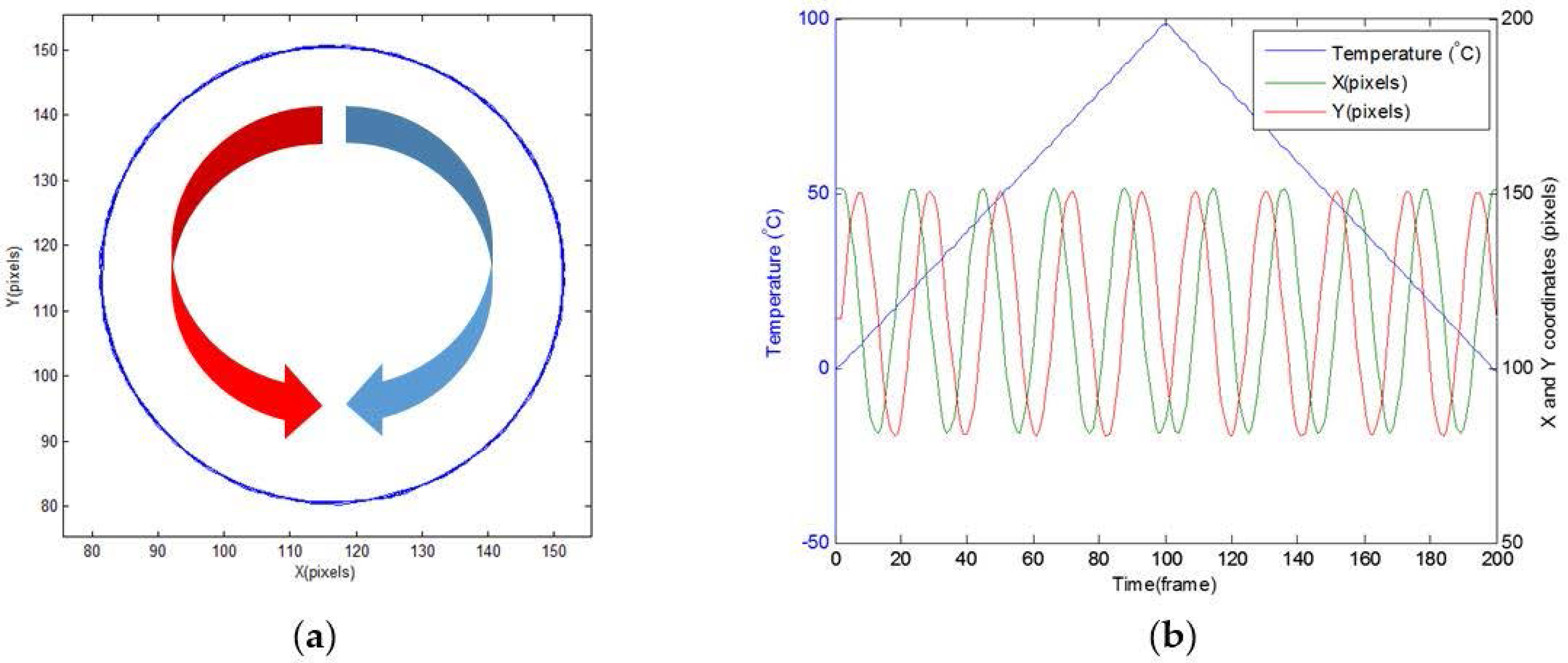
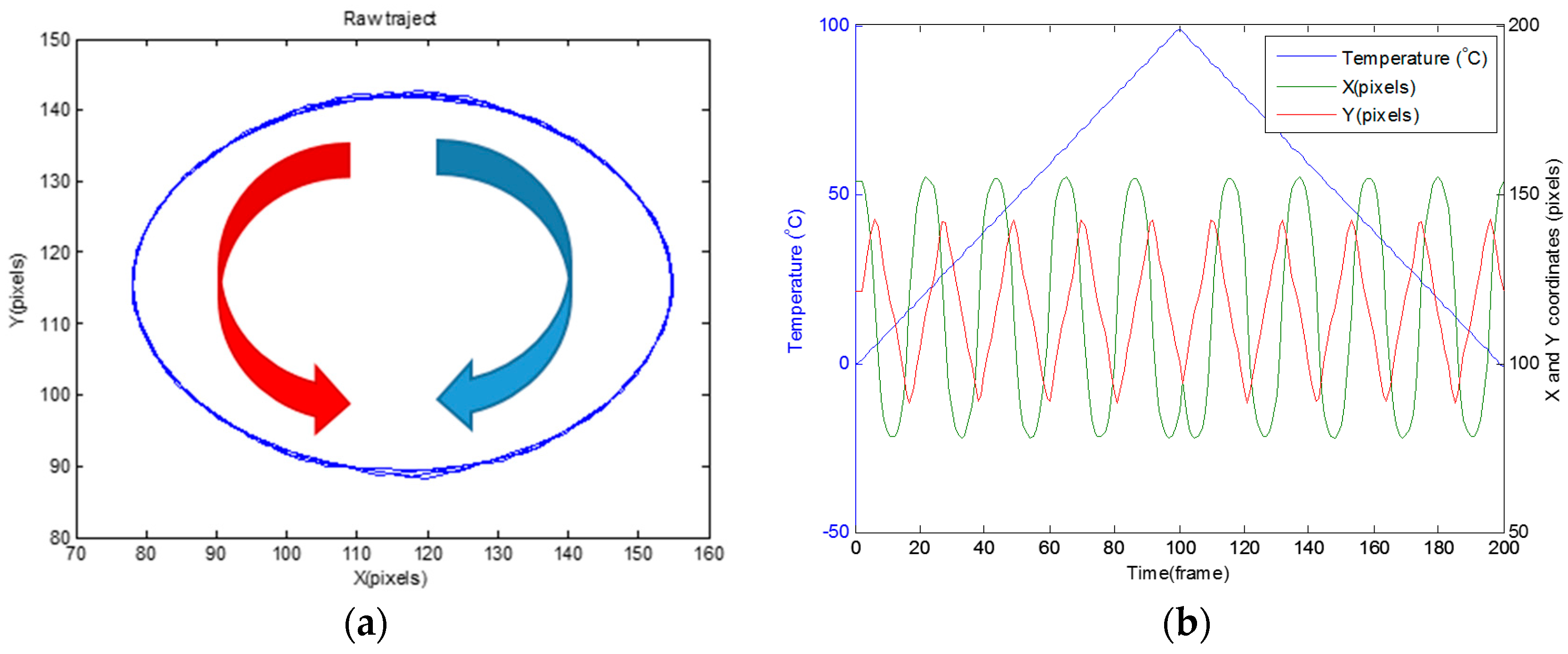
- Determining the trajectory of the selected maximum intensity.
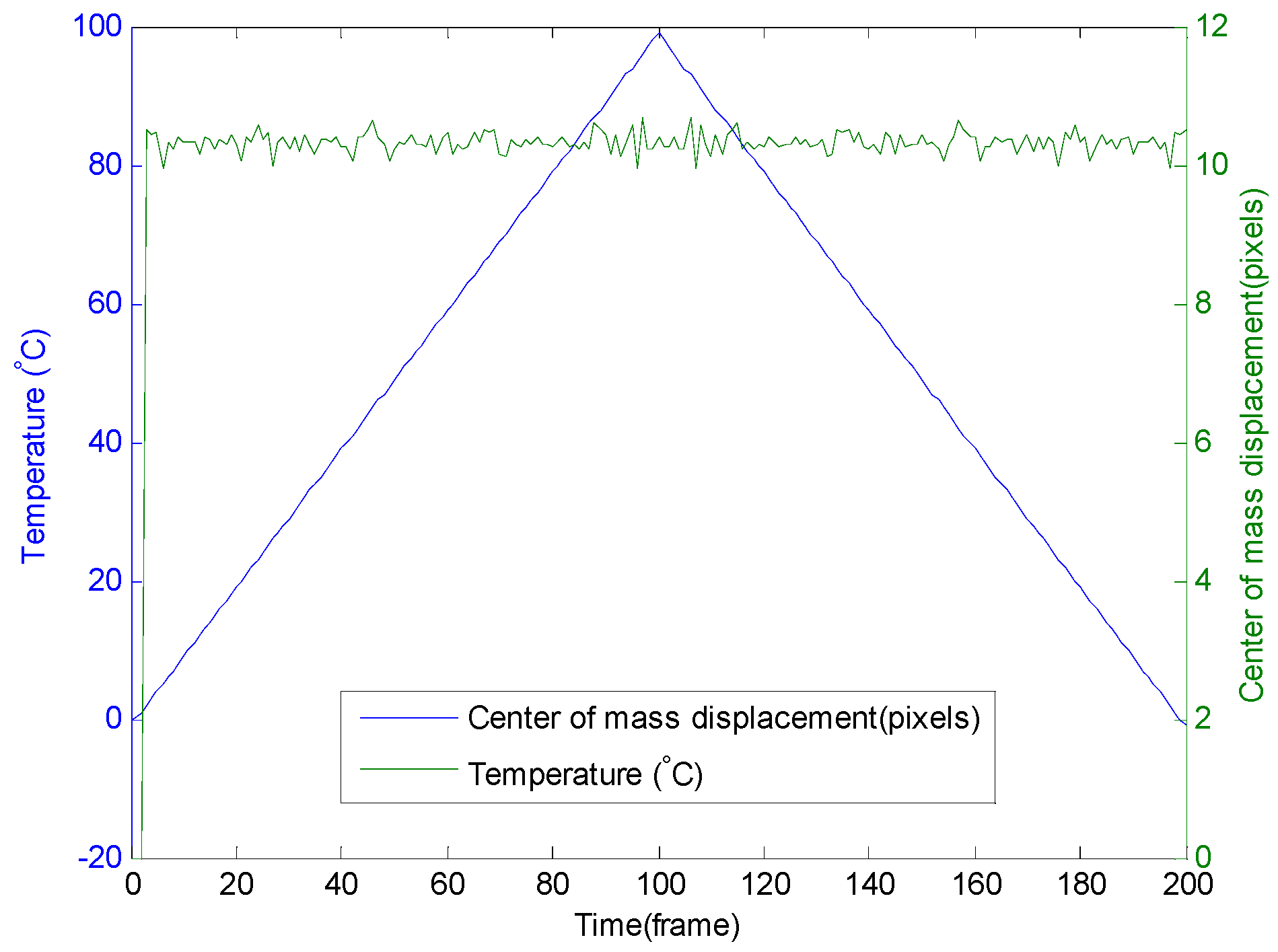
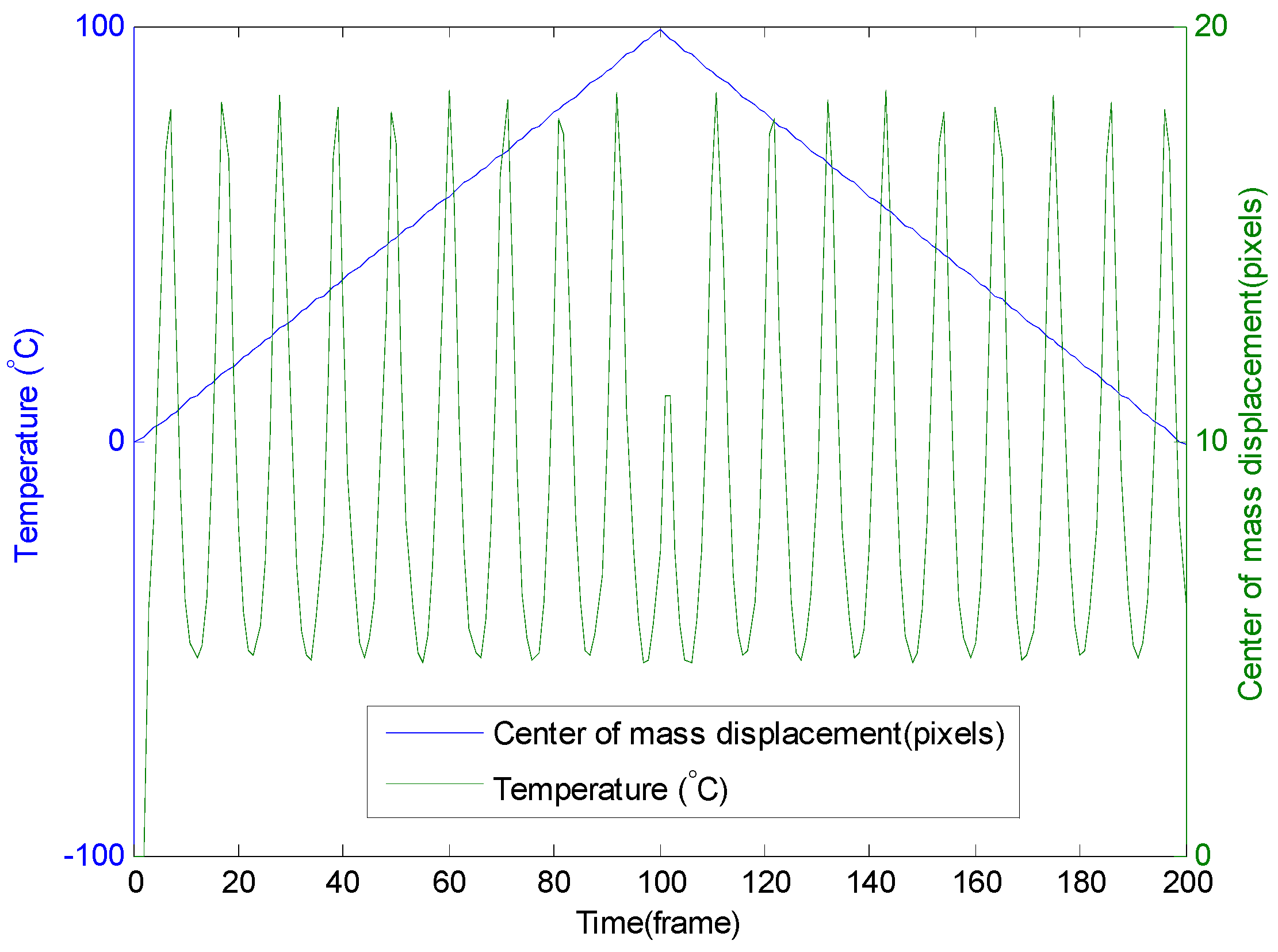
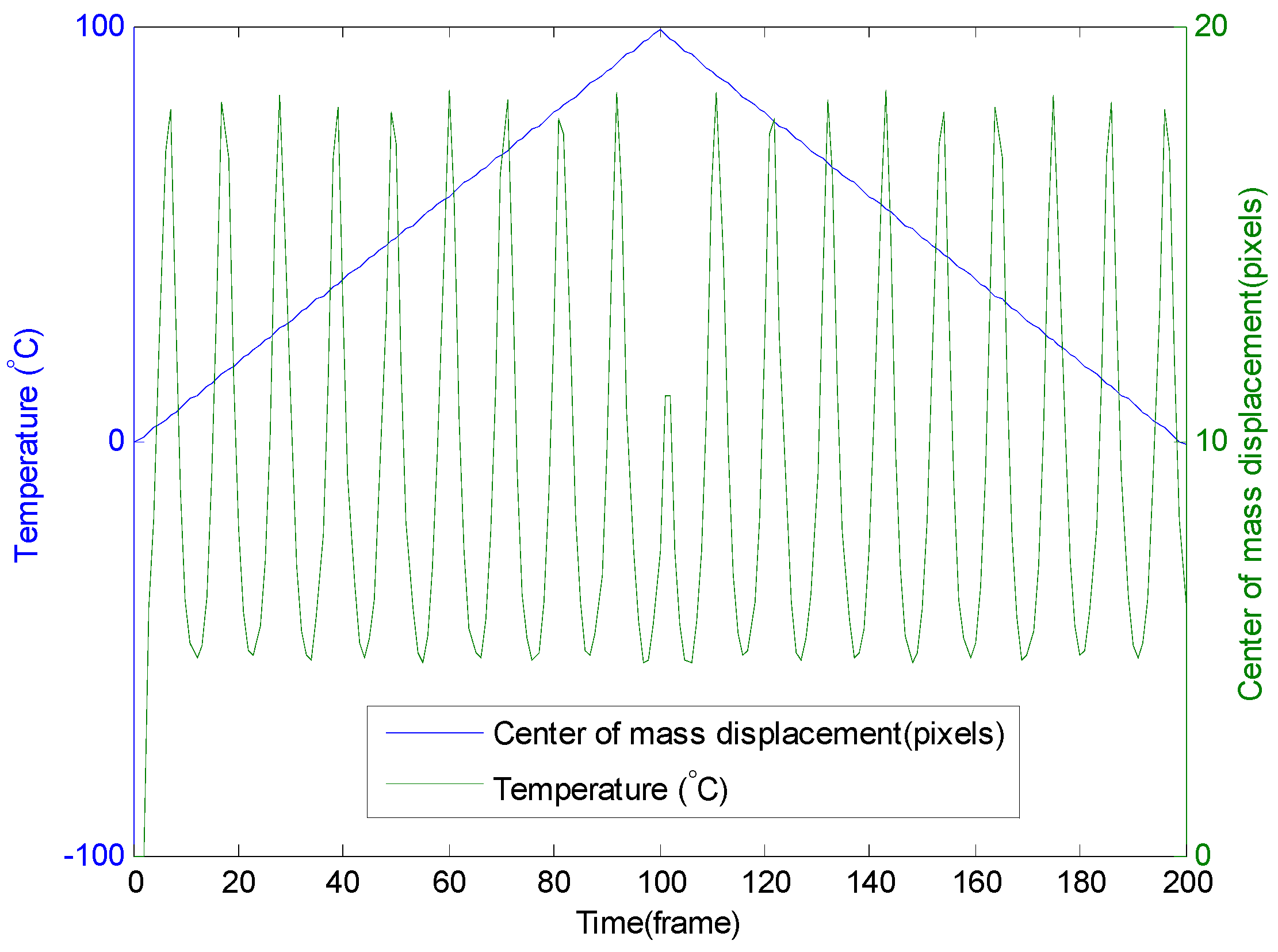
- Based on the determined trajectory of the selected maximum intensity, determining the temperature variation of the different mode optical fibers using the phase signal of the X or Y components of the center-of-mass.
- Determining signs of temperature variation from the phase lag between the X and Y components of the center-of-mass.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Epworth, R. The phenomenon of modal noise in analogue and digital optical fibre systems. In Proceedings of the 4th European Conference on Optical Communications, Genoa, Italy, 12–15 September 1978.
- Rawson, E.; Goodman, J.; Norton, R. Analysis and measurement of the modal-noise probability distribution for a step-index optical fiber. Opt. Lett. 1980, 5, 357–358. [Google Scholar] [CrossRef] [PubMed]
- Goodman, J.; Rawson, E. Statistics of modal noise in fibers: A case of constrained speckle. Opt. Lett. 1981, 6, 324–326. [Google Scholar] [CrossRef] [PubMed]
- Martincek, I.; Pudis, D.; Kacik, D.; Schuster, K. Investigation of intermodal interference of LP01 and LP11 modes in the liquid-core optical fiber for temperature measurements. Optik 2010, 122, 707–710. [Google Scholar] [CrossRef]
- Eftimov, T.A.; Bock, W.J. Sensing with a LP01-LP02 intermodal interferometer. J. Lightwave Technol. 1993, 11, 2150–2156. [Google Scholar] [CrossRef]
- Eickhoff, W. Temperature sensing by mode-mode interference in birefringent optical fibers. Opt. Lett. 1981, 6, 204–206. [Google Scholar] [CrossRef] [PubMed]
- Kumar, A.; Goel, N.K.; Varshney, R.K. Studies on a Few-Mode Fiber-Optic Strain Sensor Based on LP 01-LP 02 Mode Interference. J. Lightwave Technol. 2001, 19, 358–362. [Google Scholar] [CrossRef]
- Spillman, W.; Kline, B.; Maurice, L.; Fuhr, P. Statistical-mode sensor for fiber optic vibration sensing uses. Appl. Opt. 1989, 28, 3166–3176. [Google Scholar] [CrossRef] [PubMed]
- Murphy, K.A.; Miller, M.S.; Vengsarkar, A.M.; Claus, R.O. Elliptical-core two mode optical-fiber sensor implementation methods. J. Lightwave Technol. 1990, 8, 1688–1696. [Google Scholar] [CrossRef]
- Pan, K.; Uang, C.; Cheng, F.; Yu, F. Multimode fiber sensing by using mean-absolute speckle-intensity variation. Appl. Opt. 1994, 33, 2095–2098. [Google Scholar] [CrossRef] [PubMed]
- Wang, A.; Xiao, H.; Wang, J.; Wang, Z.; Zhao, W.; May, R.G. Self-calibrated interferometric-intensity-based optical fiber sensors. J. Lightwave Technol. 2001, 19, 1495–1501. [Google Scholar] [CrossRef]
- Numata, G.; Hayashi, N.; Tabaru, M.; Mizuno, Y.; Nakamura, K. Modal-interference-based temperature sensing using plastic optical fibers: Markedly enhanced sensitivity near glass-transition temperature. In Proceedings of the Fifth Asia-Pacific Optical Sensors Conference, Jeju, Korea, 20–22 May 2015; Volume 9655, pp. 18–21.
- Nguyen, L.V.; Hwang, D.; Moon, S.; Moon, D.S.; Chung, Y. High temperature fiber sensor with high sensitivity based on core diameter mismatch. Opt. Express 2008, 16, 11369–11375. [Google Scholar] [CrossRef] [PubMed]
- Li, E.; Wang, X.; Zhang, C. Fiber-optic temperature sensor based on interference of selective higher-order modes. Appl. Phys. Lett. 2006, 89, 9–12. [Google Scholar] [CrossRef]
- Musin, F.; Mégret, P.; Wuilpart, M. Fiber optic temperature and vibration sensor for underground power cables. In Proceedings of the Symposium IEEE Photonics Society Benelux Chapter, Ghent, Belgium, 1–2 December 2011; pp. 269–272.
- Musin, F.; Mégret, P.; Wuilpart, M. Speckle velocity sensor for underground infrastructure thermal monitoring. In Proceedings of the Symposium IEEE Photonics Society Benelux Chapter, Mons, Belgium, 29–30 November 2012; pp. 207–210.
- Musin, F.; Megret, P.; Wuilpart, M.; Grandjean, H.; Callemeyn, J.; Fohal, J. Fibre Optic Temperature Sensor Using Intermodal Interference for Underground Cable Joints Monitoring. In Proceedings of the Jicable’15, Versailles, France, 21–25 June 2015.
- Musin, F.; Mégret, P.; Wuilpart, M. Fiber optic temperature sensor based on image processing of intermodal interference pattern. In Proceedings of the IEEE Sensors 2014, Valencia, Spain, 2–5 November 2014; pp. 1519–1522.
- Safaai-Jazi, A.; McKeeman, J.C. Synthesis of Intensity Patterns in Few-Mode Optical Fibers. J. Lightwave Technol. 1991, 9, 1047–1052. [Google Scholar] [CrossRef]
- Spillman, W.B.; Huston, D.R. Scaling and Antenna Gain in Integrating Fiber-optic Sensors. J. Lightwave Technol. 1995, 13, 1222–1230. [Google Scholar] [CrossRef]
- McMillan, J.L.; Robertson, S.C. Dual-mode optical fibre interferometric sensor. Electron. Lett. 1984, 20, 2–3. [Google Scholar] [CrossRef]
- Spajer, M.; Carquille, B.; Maillotte, H. Application of intermodal interference to fibre sensors. Opt. Commun. 1986, 60, 261–264. [Google Scholar] [CrossRef]
- Eftimov, T.; Bock, W. Sensing with a LP01-LP02 Intermodal Interferometer. J. Lightwave Technol. 1993, 11–12, 2150–2156. [Google Scholar] [CrossRef]
- Palmieri, L.; Galtarossa, A. Coupling Effects among Degenerate Modes in Multimode Optical Fibers. IEEE Photonics J. 2014, 6. [Google Scholar] [CrossRef]
- Nicholas, F.V.; White, D.R. Use of thermometer. In Traceable Temperatures; John Wiley and Sons: Hoboken, NJ, USA, 2001; pp. 134–146. [Google Scholar]
- Parker, W.J.; Jenkins, R.J.; Butler, C.P.; Abbott, G.L. Flash method of determining thermal diffusivity, heat capacity, and thermal conductivity. J. Appl. Phys. 1961, 32, 1679–1684. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Value |
|---|---|
| Cladding diameter | 125 µm ± 0.7 µm |
| Core diameter | 8.2 µm |
| Cabled Cut-Off Wavelength | 1260 nm |
| Refractive Index Profile | Step-index |
| Numerical aperture | 0.14 |
| Refractive index difference | 0.36% |
| Silica thermal expansion coefficent | 5 × 10−6 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Musin, F.; Mégret, P.; Wuilpart, M. Fiber-Optic Surface Temperature Sensor Based on Modal Interference. Sensors 2016, 16, 1189. https://doi.org/10.3390/s16081189
Musin F, Mégret P, Wuilpart M. Fiber-Optic Surface Temperature Sensor Based on Modal Interference. Sensors. 2016; 16(8):1189. https://doi.org/10.3390/s16081189
Chicago/Turabian StyleMusin, Frédéric, Patrice Mégret, and Marc Wuilpart. 2016. "Fiber-Optic Surface Temperature Sensor Based on Modal Interference" Sensors 16, no. 8: 1189. https://doi.org/10.3390/s16081189