1. Introduction
Microbolometers are a type of infrared (IR) radiation detector developed by Honeywell in the 80s, to be used as focal plane arrays (FPAs) in imaging systems [
1]. Microbolometers are thermal IR sensors, that is, they modify their temperature according to the absorbed IR radiation. The bolometer feature of these sensors means that temperature variations in the sensor produce changes in its electrical resistance. Such a change can be, in turn, measured by means of simple electrical circuits. Finally, the changes in the electrical resistance are processed in a digital fashion to ultimately obtain read-out values quantifying the amount of IR radiation absorbed by the detector. Nowadays, IR cameras based on microbolometers are the most used technology for sensing in the band of 7 to 14
m, since such technology provides a good enough sensitivity to the applications, at an affordable price. Moreover, unlike other technologies such as HdCdTe, microbolometers do not require cryogenic cooling systems to operate in the long-wave infrared (LWIR) band [
2].
It has been observed in the literature that images rendered by uncooled microbolometer-based IR cameras are severely degraded by the spatial non-uniformity (NU) noise, also termed as fixed-pattern noise (FPN). Such noise imposes a fixed-pattern over the true images, and is defined as the spatially heterogeneous response of the IR camera to a uniform incoming radiation [
3]. The NU noise is caused by gradients in the fabrication of the IR FPA and readout circuitry, initial conditions of the detectors and temperature gradients [
4]. The spatial structure of the NU noise is fixed; however, its intensity varies with time due to the temperature instability of the camera [
3,
5]. The NU noise is particularly severe in microbolometer-based IR cameras, because temperature variations in the IR detector result in thermal drift and exacerbate the negative effects of the NU noise. Such variations can be produced by either the surrounding environment or internal camera elements such as the lens, the FPA, and the read-out electronics [
6,
7,
8]. Since variations in the camera temperature are unavoidable because they are part of its normal operation, manufactures and users must deal with the problem of compensating the read-out data prior to obtain an accurate measurement of the target of interest.
The temperature-dependent non-uniformity correction (NUC) problem in microbolometer-based IR cameras has traditionally been solved by performing periodic multi-point calibration (MPC) [
9], or using adaptive signal-processing-based NUC algorithms based on the statistics of the scene [
10,
11,
12,
13,
14]. MPC must be performed periodically to maintain radiometric calibration [
15]. This requires taking the camera offline and using external temperature sources, which can be impractical for many applications. Otherwise, adaptive signal-processing methods typically improve the visual quality of the image but are unable to achieve radiometric precision. Moreover, they are prone to introduce ghosting artifacts in the corrected images due to overlearning when the raw imagery lacks temporal diversity.
Currently, researchers are attempting to solve the temperature-dependent NUC problem using temperature samples of either the FPA or its surroundings. Nugent et al. proposed stabilizing the raw output of a LWIR camera using a two-parameter first-order function, which requires measuring the temperature difference of the camera between its current operating point and a predefined reference [
15]. Krupiński et al., introduced, in uncooled LWIR cameras, additional shutters and modeled the relationship between the FPA temperature and its readout raw response [
16]. Cao et al., characterized the microbolometer array using a third-order polynomial that relates the offset of each pixel in the array to the FPA temperature [
8]. Krupiński et al., recently proposed a method that uses a coefficient table to compensate for the errors caused by temperature changes in the optics of an IR camera, and computes the error caused by such variations using the camera temperature as an input [
17]. Also, in earlier works we modeled the effect of changes in the internal temperature of an IR camera, compensated their effect on the raw images, and implemented compensation algorithms in software and hardware architectures [
18,
19]. In [
20], Olbrycht and Więcek proposed the use of a semi-transparent shutter that is periodically placed in front of the FPA in order to compensate for the thermal drift of the camera. All the aforementioned methods do not exhibit ghosting artifacts and achieve better results than traditional NUC techniques; however, they demand an extensive characterization of the IR camera, frequently use complex models that must be evaluated at run time, and require samples of the FPA temperature.
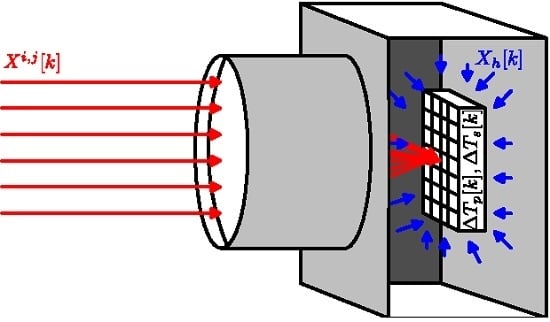
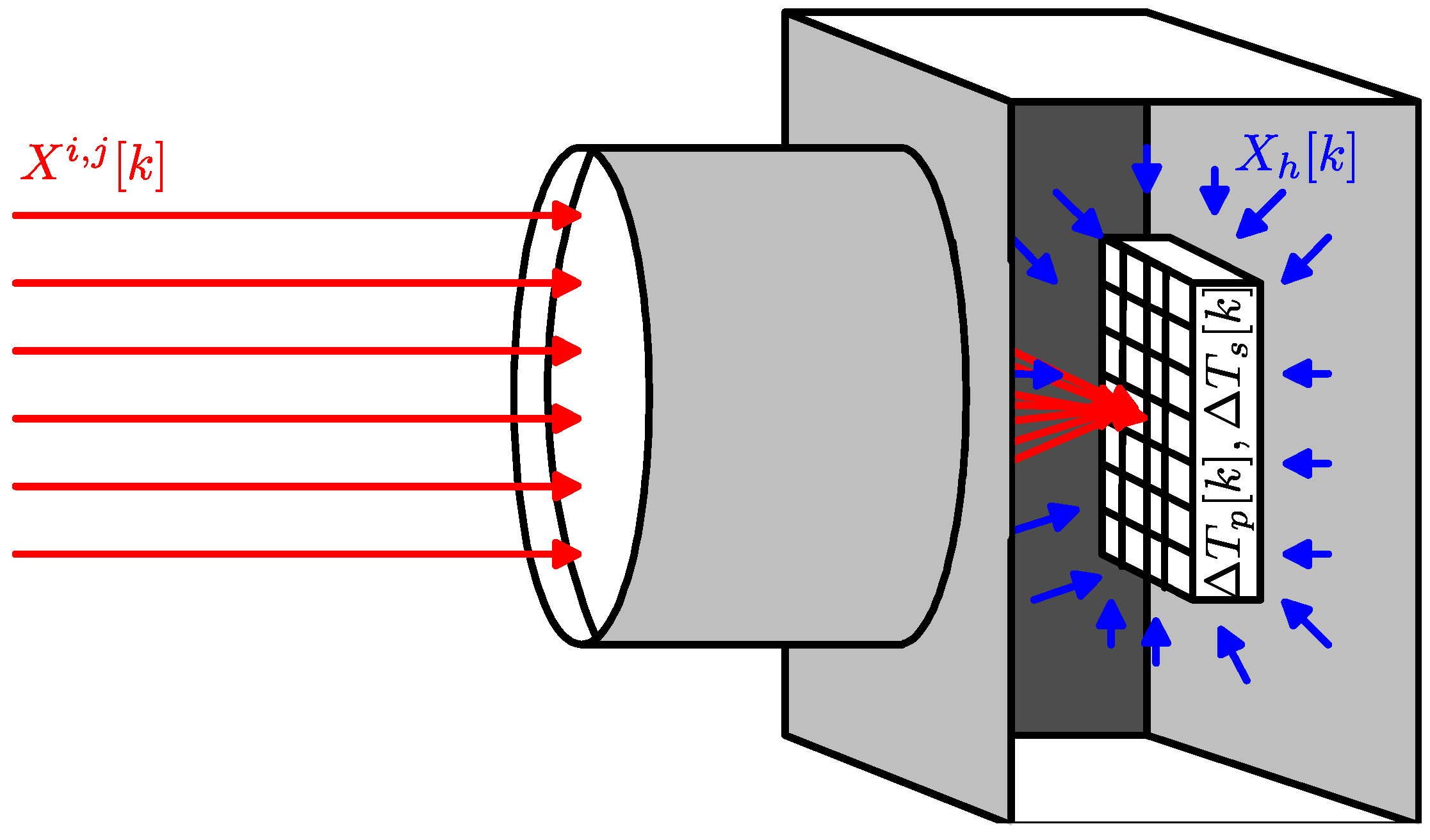
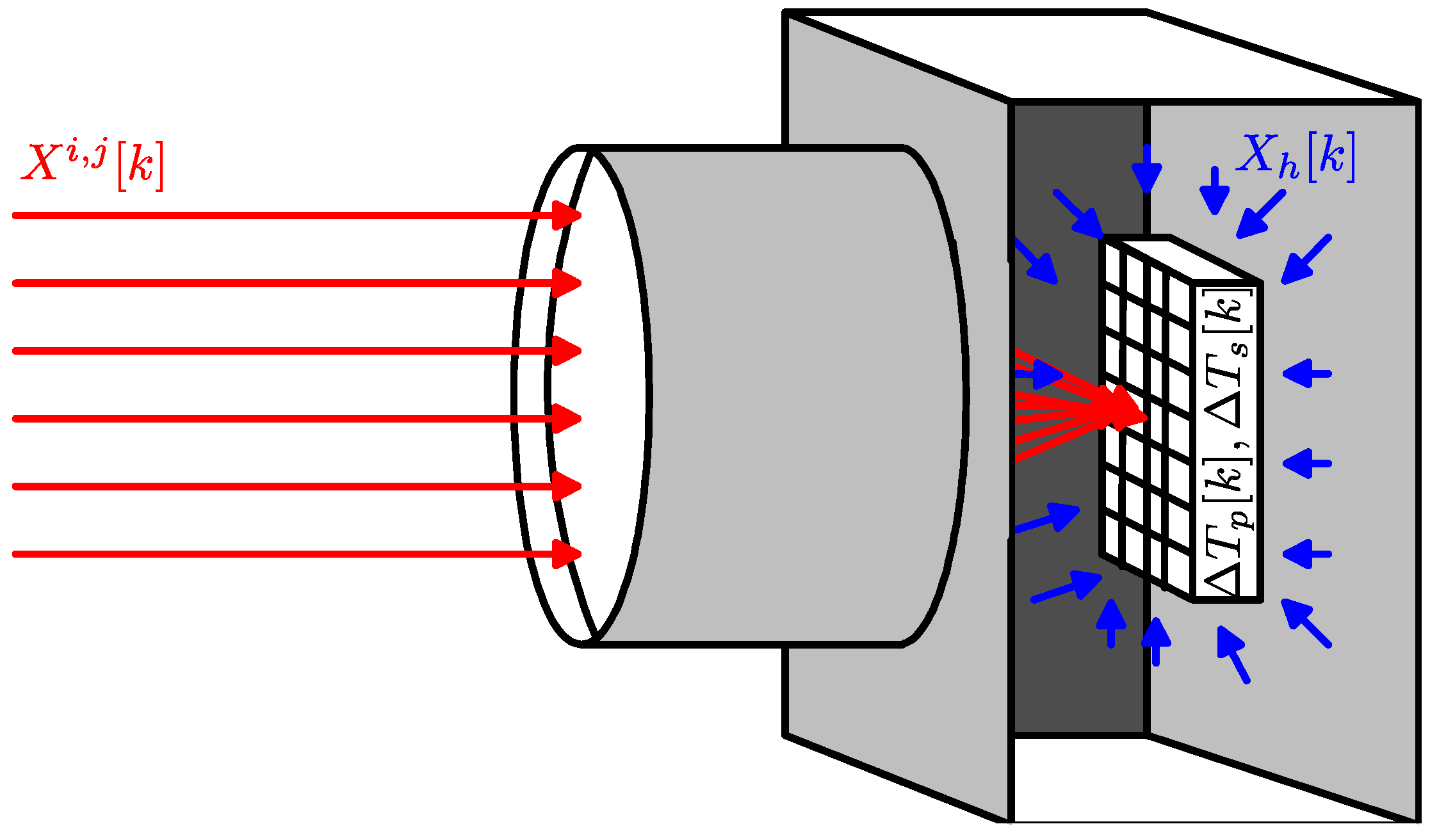
In this paper, we present a novel model for the spatial NU noise and the raw output of uncooled microbolometer-based IR cameras. In addition, we present an algorithm that compensates for the temperature-dependent variations in the NU noise. The model regards the noise as three independent terms: (i) a time-constant, spatially heterogeneous component, which defines the spatial structure of the FPN; (ii) a temperature-dependent, spatially heterogeneous component, which depends linearly on the FPA temperature fluctuations; and (iii) a temperature-dependent, spatially homogeneous component accounting for the IR radiation generated in the camera. The compensation algorithm exploits this separation to estimate the NU components offline and online. To estimate the spatially heterogeneous noise components at each pixel in the FPA, we use an offline MPC method and vary the temperature of the FPA during calibration. Next, we estimate the temperature-dependent, spatially homogeneous component using a Hammerstein-Wiener (HW) model designed offline, and samples from the temperature sensor. Finally, the temperature-dependent, spatially nonuniform component is estimated using a least mean squares (LMS) estimator and the IR video data.
The remaining part of this paper is organized as follows. In
Section 2.1, we derive the model proposed in this work by analyzing the internal and external sources affecting the microbolometer temperature in an IR camera. Next, in
Section 2.2, we present the image compensation model, the NU noise parameter estimator as well as the HW model used to track the temperature variations in the IR array. In
Section 3, we present test results using two long-wave IR cameras, a commercial a-Si–based camera and a VOx-based camera core, with a black body calibrator and natural IR images. In the same section, the NUC performance of the algorithm is also tested using real IR images. Finally, in
Section 4, the main conclusions of our work are presented and the future work is outlined.
3. Results and Discussion
We performed the calibration in Equations (7)–(9) with an initial FPA temperature of 26 C for the FLIR core and 34 C for the CEDIP camera, C, C, and set a black-body radiator at C and C. We designed a third-order HW estimator using FPA temperature samples between C and C. All model parameters were obtained 6 months before the experiments presented below.
In order to select the learning rate
η and window size
W, we used the FLIR core to capture IR video in a room, and calibrated the output using black-body radiators. We run our algorithm on the raw output of the core to estimate
using Equation (
6), and computed the RMSE between our estimation and the calibrated output. The online estimation of
is initially performed on each video frame, while the HW estimator runs every 500 ms. The FPA temperature remained constant during the experiment.
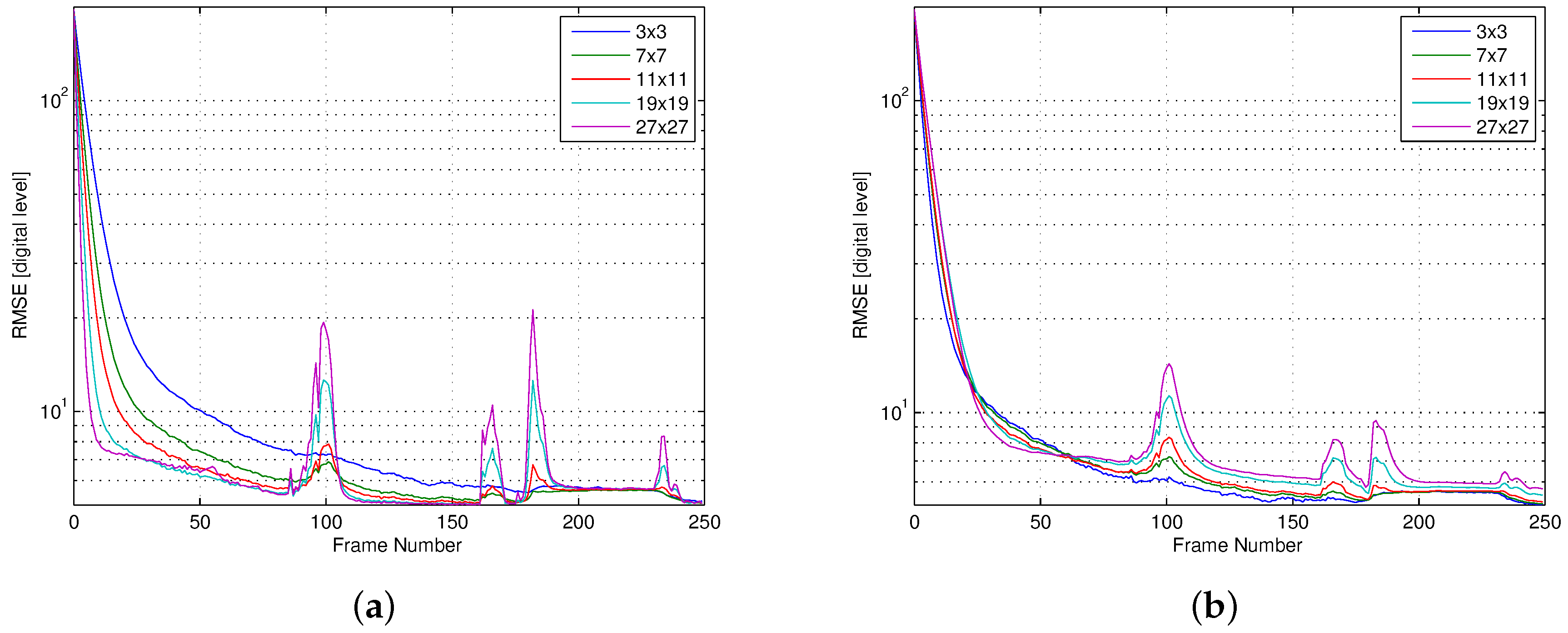
Figure 2 shows the RMSE as a function of the video frame number for different-size windows.
In the graph of
Figure 2a, we used the same learning rate independently of the window size. Because larger windows can capture spatial temperature gradients in the scene, the value of the error term
in Equation (
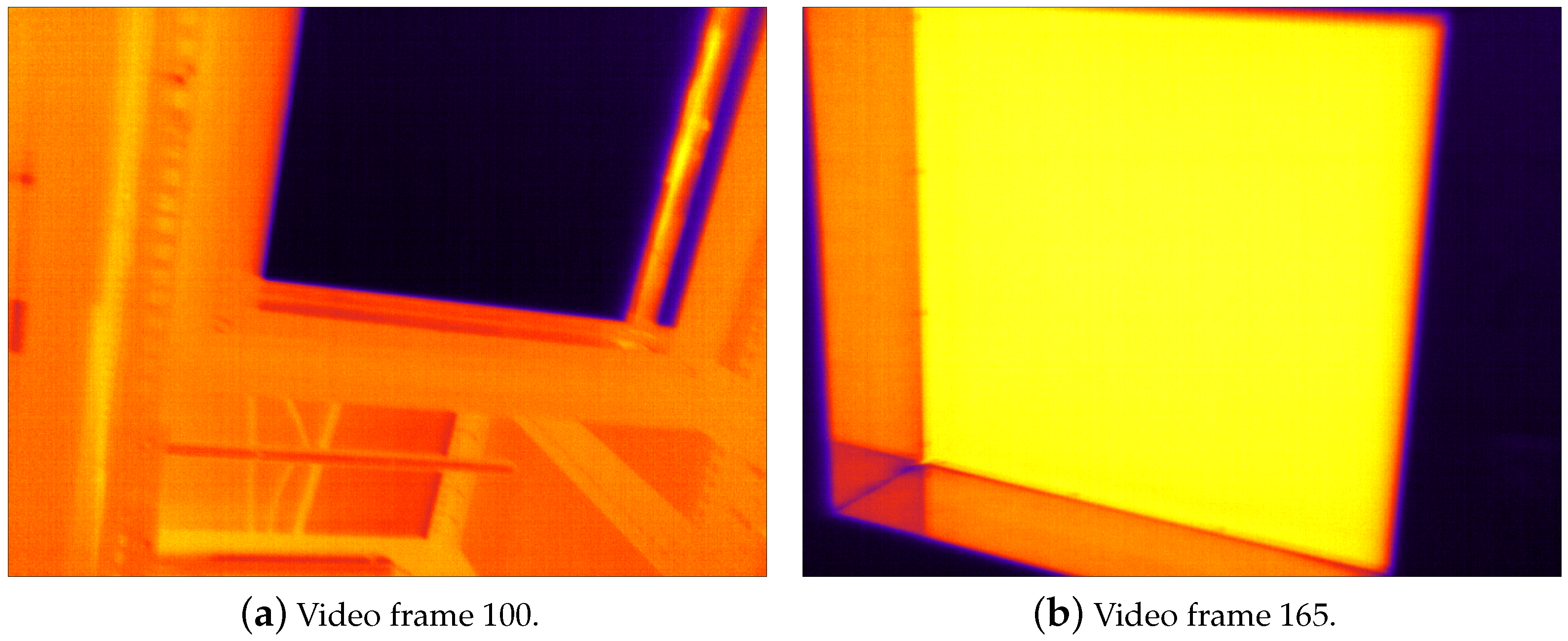
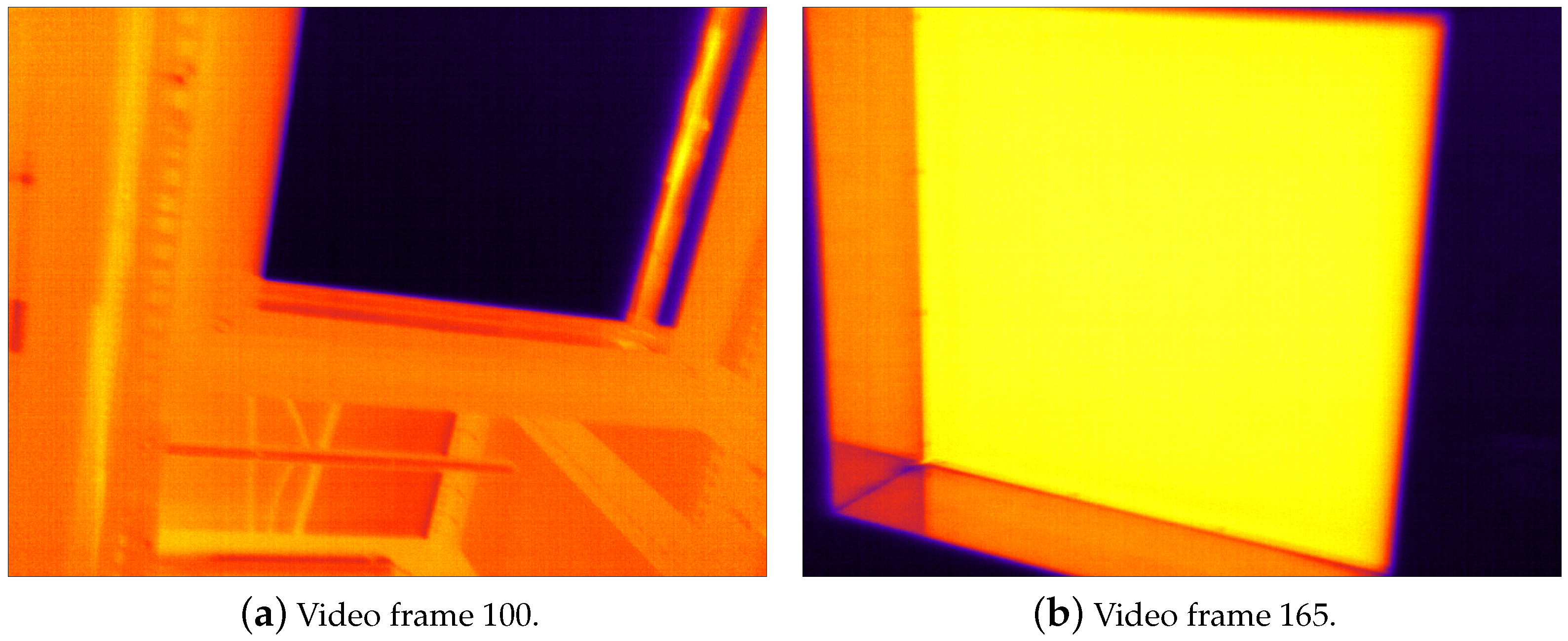
10) may be larger for these windows. Consequently, using larger windows results in a shorter settling time than smaller windows. The graph also shows RMSE peaks around video frame numbers 100, 165, 185, and 235. These peaks occur when objects that produce large spatial gradients enter the scene (e.g., cold surfaces and black-body radiators), as shown in
Figure 3. These gradients generate a larger error term, causing an increase in the RMSE. This effect is significantly more pronounced for larger window sizes.
Figure 2b repeats the experiment, this time adjusting the learning rates empirically to achieve a similar settling time for different window sizes. The graph shows that, after 60 video frames (2 s), the RMSE settles to values below 5 digital counts, which is equivalent to
C. For a
-pixel window, the RMSE remains less than 2 digital counts (
C) after 100 video frames, and it exhibits peaks of almost negligible magnitude. In consequence, we used a
-pixel window (
) and a learning rate
in the rest of our experiments.
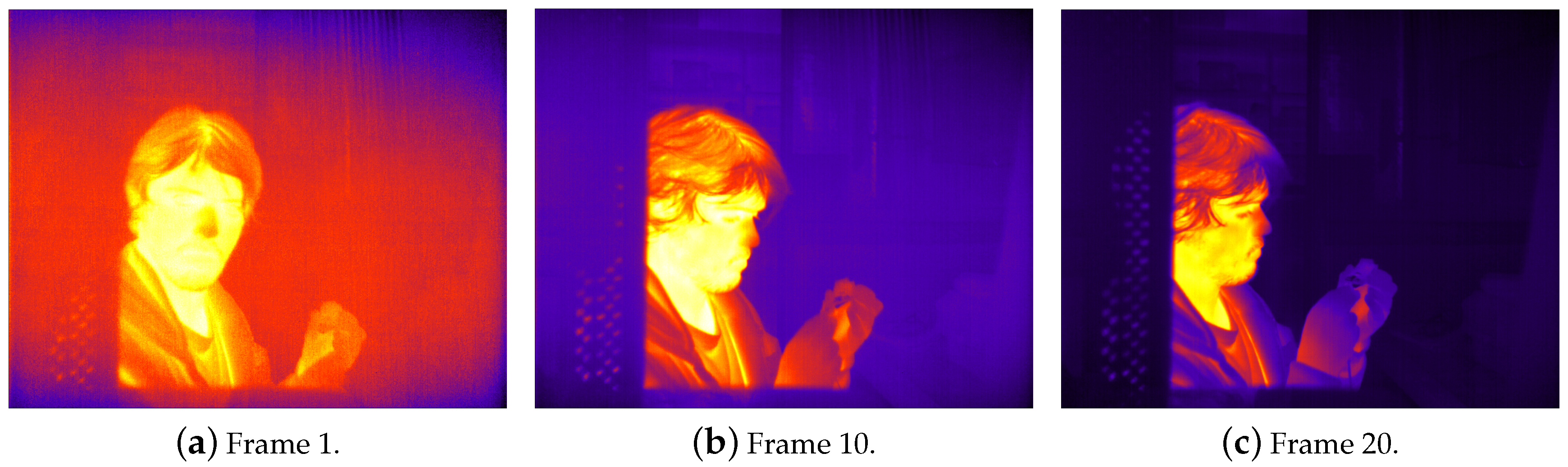
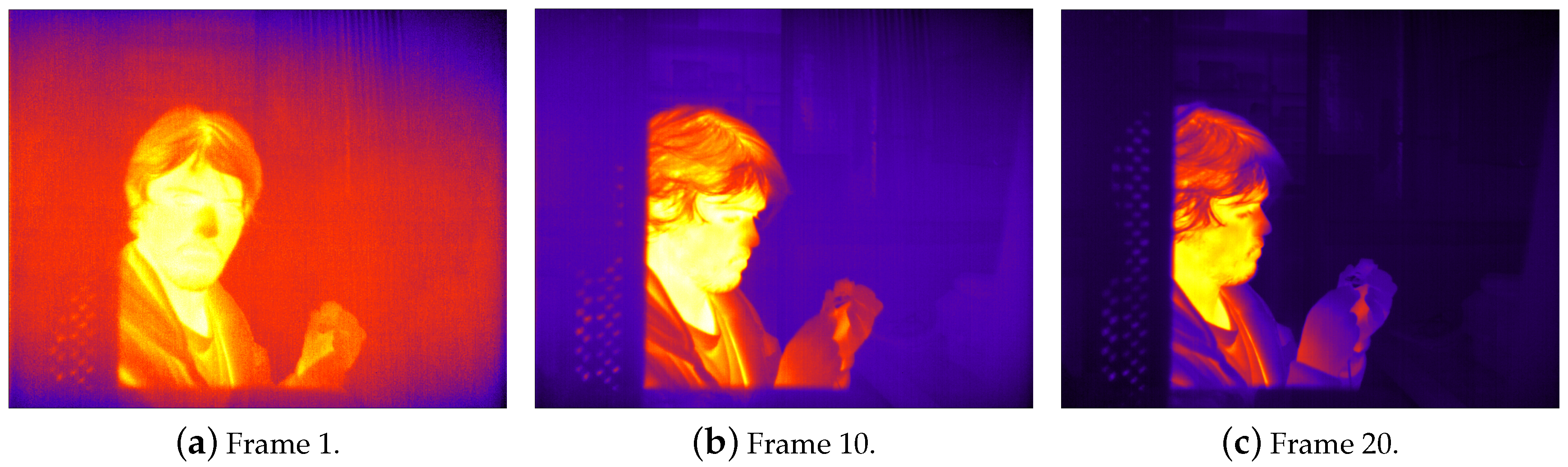
Figure 4 shows three video frames from the FLIR core after starting the algorithm with the FPA temperature
C. After only 20 iterations (670 ms), the algorithm successfully removes all visible NU artifacts from the image. The recursion in Equation (
10) converges in less than 100 video frames (3.3 s). Because changes in the FPA temperature are typically slow, we run the estimator every 500 ms after this initial sequence, thus greatly reducing the computational requirements of the algorithm.
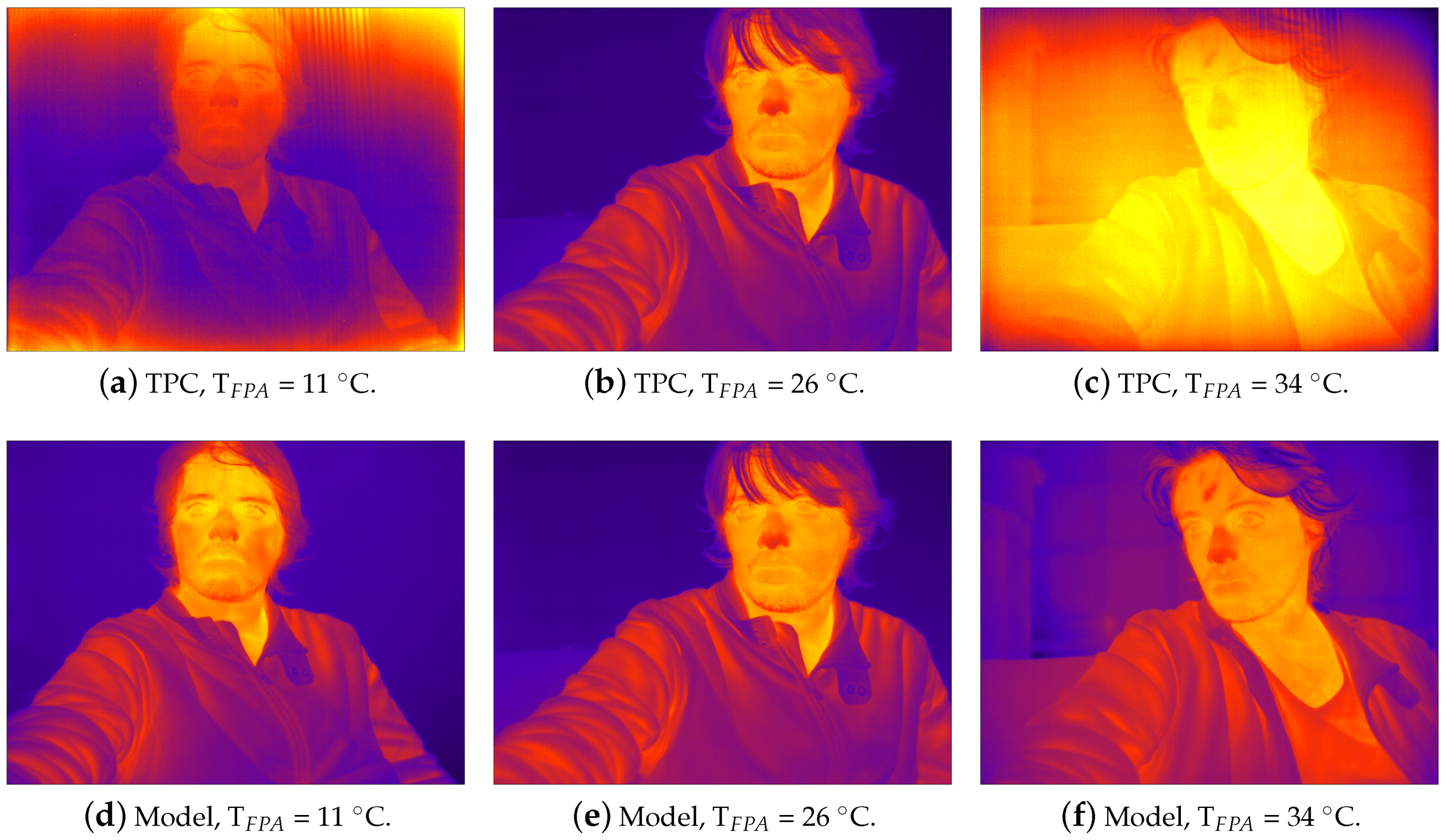
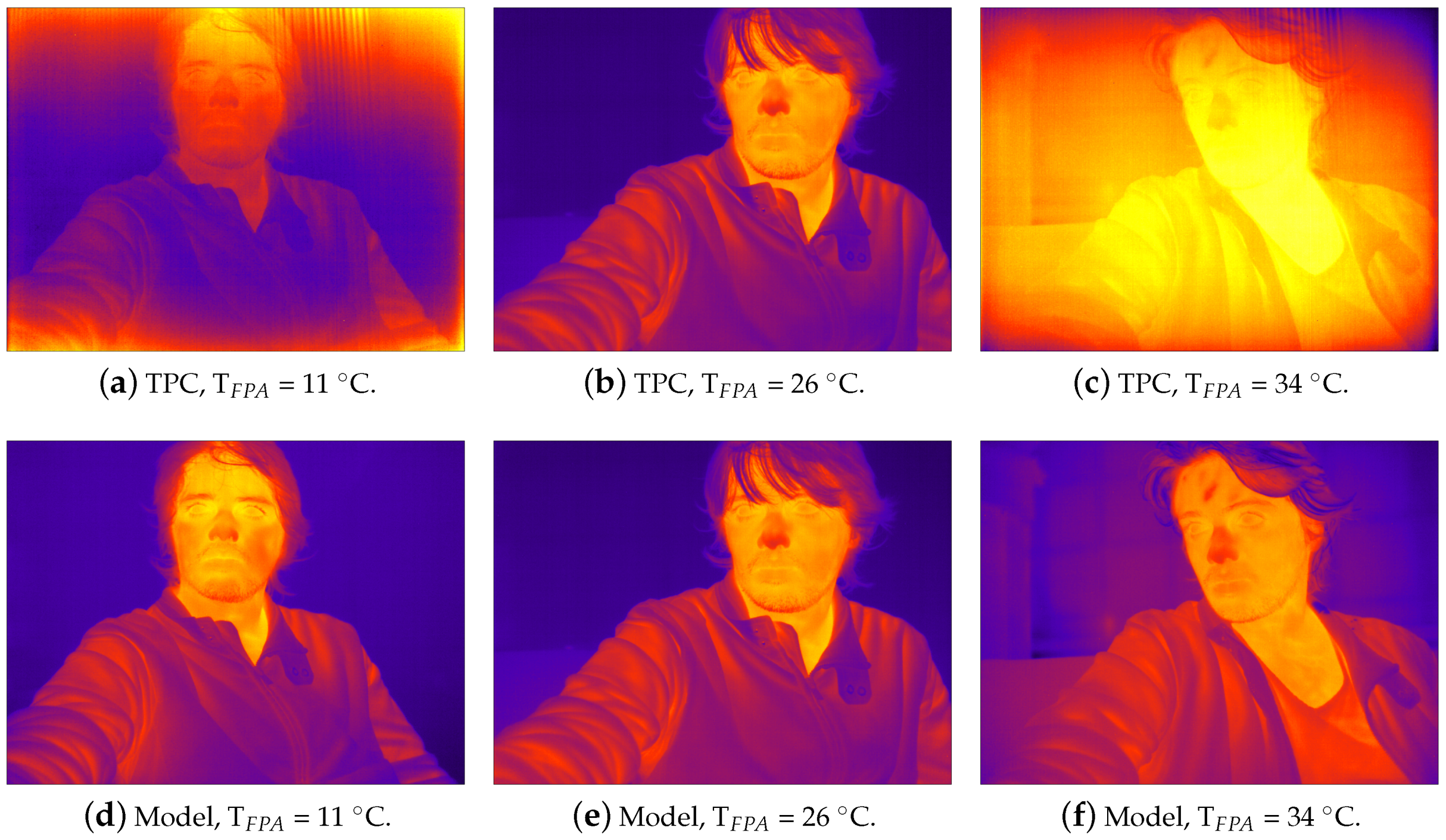
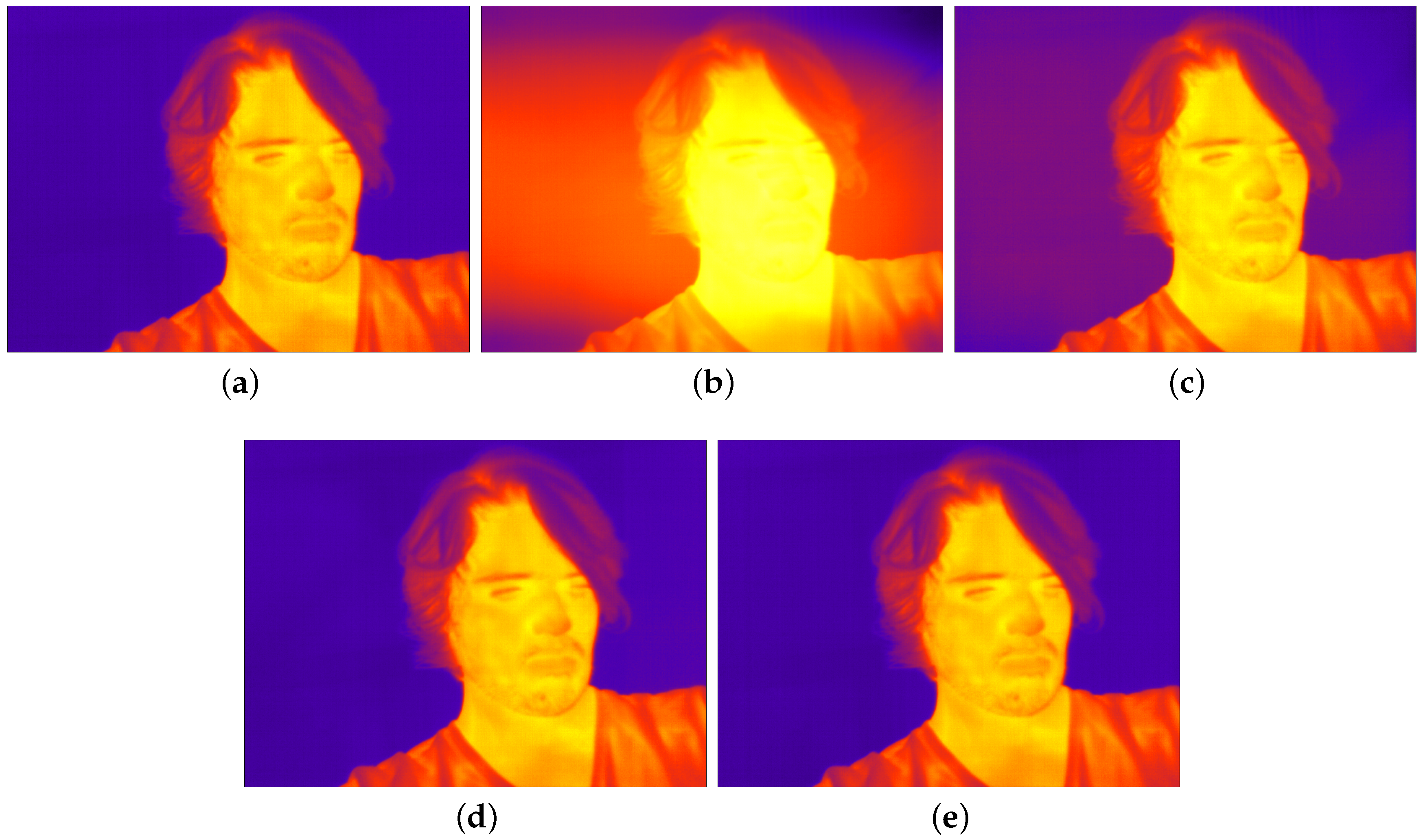
Figure 5 compares the performance of regular two-point calibration (TPC) to our model correcting visual NU artifacts in the presence of changes in
. Both the model and TPC parameters were computed with
C, and the images were captured from the FLIR core while we heated the environment to vary
from
C to
C. TPC successfully corrects the image only when the temperature of the FPA is the same used for calibration, see
Figure 5b. For other temperatures, the image exhibits NU artifacts induced by the FPA and imaging optics [
24]. Unlike TPC, our algorithm successfully eliminates such artifacts not only at
C, but also for all values.
Videos attached as
Supplementary Material show both algorithms operating in real time at
C. Video 1 is the raw output of the camera, showing severe FPN artifacts. Video 2 is the output produced by regular TPC when the calibration was performed at the same temperature of
C. At this operating temperature, the algorithm successfully corrects the artifacts present in the raw video. Video 3 is the output of the same algorithm, but with parameters obtained at
C. The difference between calibration and operation temperature produces noticeable FPN artifacts from the FPA and the camera optics. In contrast, Video 4 shows the output produced by the method proposed in this paper. Despite using parameters obtained at
C and operating at
C, the resulting image is free of FPN artifacts.
To evaluate the performance of our algorithm quantitatively, we used the camera to measure the temperature of a black-body radiator, using a polynomial fit to map the digital counts from the camera to temperature values. The black body temperature,
, was set to 30
C, and we progressively heated the room to vary
.
Figure 6a shows the results for the CEDIP camera, where
increased by
C during the experiment. Using TPC, the estimate of
was correct only when
C, which corresponds to the FPA temperature when the TPC was carried out. Otherwise, the estimate of
varied from
C to
C. The output of our model remained stable at 30
C, with an average RMSE of
C and a median RMSE of
C throughout the experiment.
Figure 6b shows the same results for the FLIR core, with a
increase of
C in 40 min. Again, the TPC estimate varies by
C and is correct only when the FPA is at its calibration temperature of
C. Our model correctly estimates
C, with an average RMSE of
C and a median RMSE of
C.
Figure 6c illustrates another experiment where we varied the set point of the black-body radiator from
C to
C in
C steps, and plotted our estimate of
using the CEDIP camera. The temperature of the FPA varied between
C and
C during the experiment, mainly due to the changes in environmental temperature induced by the black body. The ringing in the model output is due to the black-body temperature control loop, as confirmed by its own temperature readings. The model provides an accurate estimate of
throughout the black-body temperature range.
Figure 6c also illustrates the coarse quantization provided by the embedded temperature sensor.
Figure 6d shows another experiment, where we used the FLIR core and varied the black-body set point between
C and
C. The FPA temperature of the IR core is notably more sensitive to changes in the environment than the CEDIP camera, varying between
C and
C. Again, the model provides an accurate online estimate of
throughout the entire experiment.
Next, we assess the quality of the images rendered by the proposed NUC method in real IR video sequences. In addition, we compare our NUC method with the following scene-based methods: the Enhanced Constant Range (ECR) NUC method [
25], Scribner’s retina-like NUC method [
26], and a Kalman filter-based NUC method [
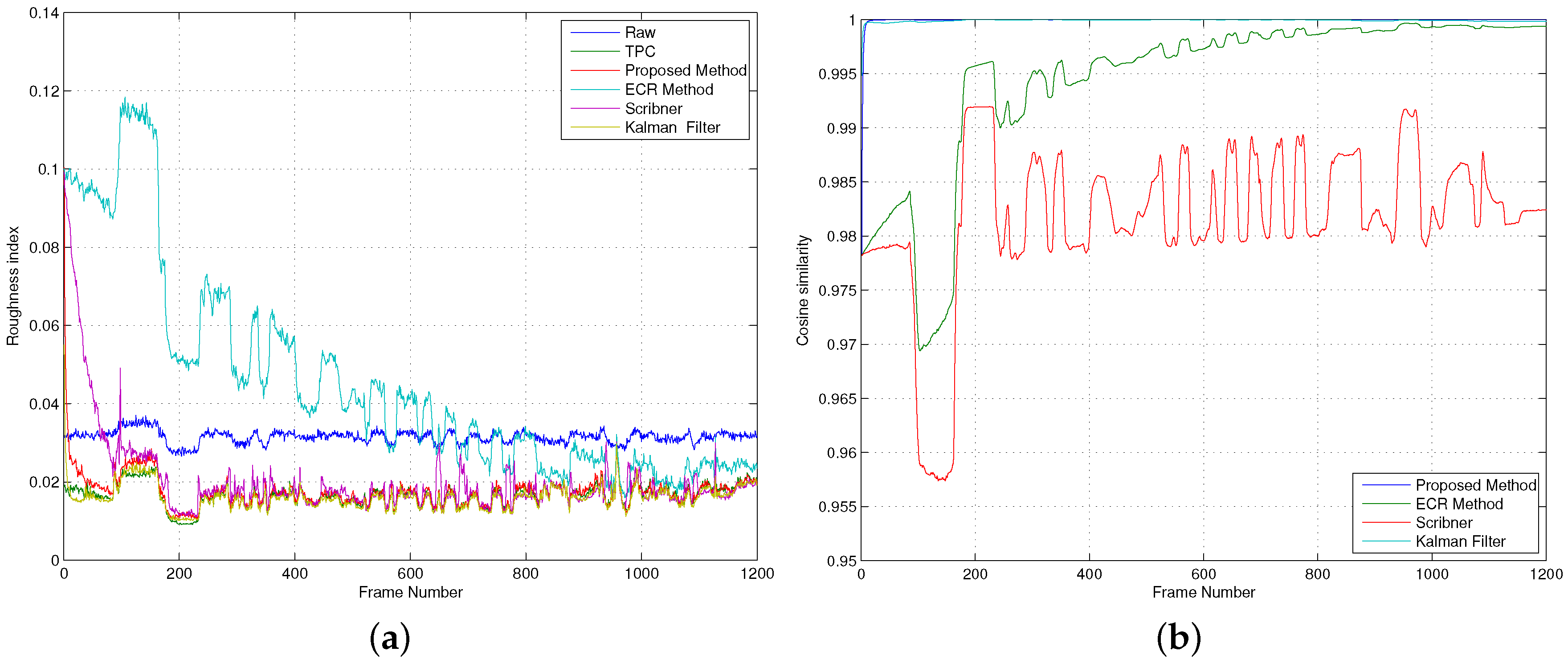
12]. To do so, we use the roughness metric and the cosine similarity between the output of each method and a TPC-corrected image. Please note that, because we calibrated the camera and captured the IR videos at the same FPA operating temperature, we can use the TPC method as the benchmark for the comparison.
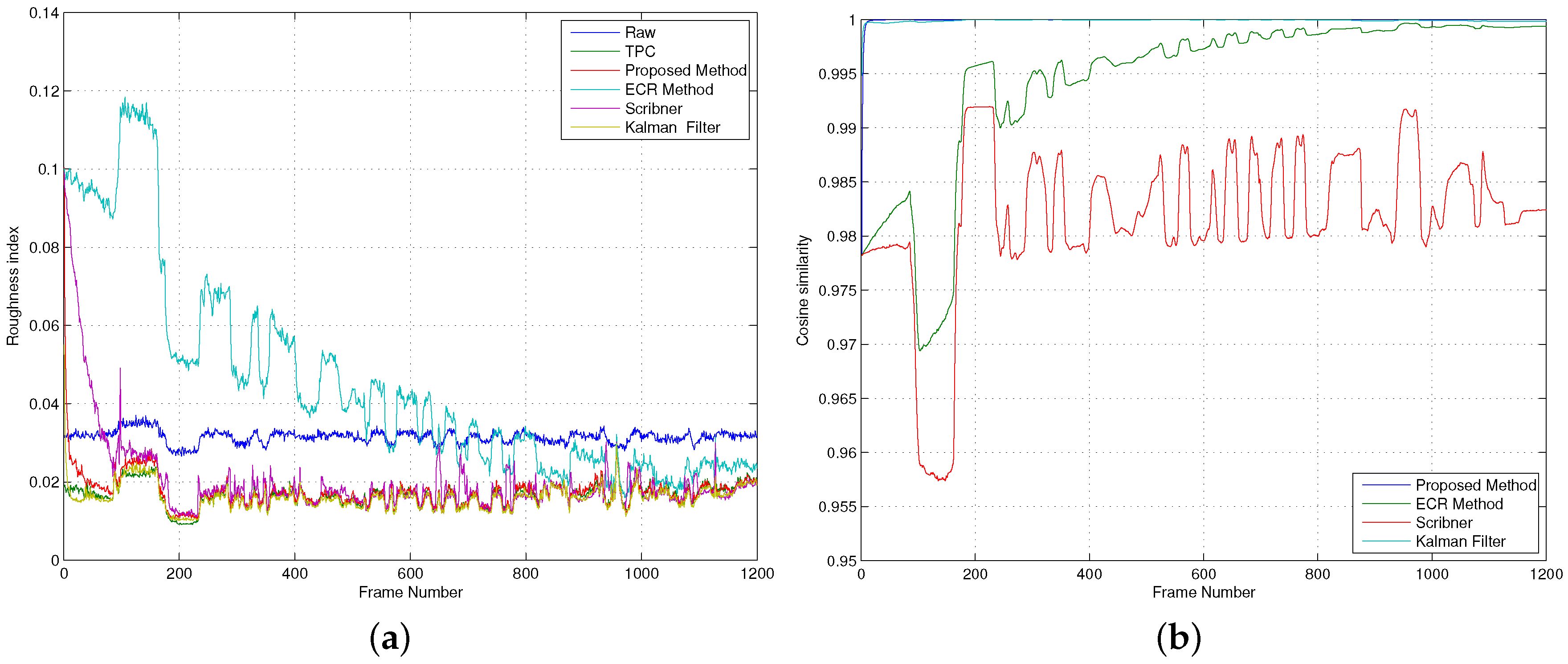
Figure 7 shows the roughness and the cosine similarity metrics for all the NUC methods. The best performance, for both metrics, is achieved by the proposed method and the Kalman filter, followed by Scribner’s method and the ECR method. The best performance of the former two algorithms is attributed to their prediction/update estimation approach. Kalman filters are well-known by their prediction/update scheme. The prediction step of the proposed method is carried out during the estimation of the NU parameters and the HW model, and the update step is carried out using the raw output and past estimates. The Scribner and the ECR methods are simpler because they lack a prediction step.
Figure 7a depicts the roughness metric, as a function of the frame number, for all the NUC methods. We also plot the roughness metric of the raw video as a reference. It can be observed from the figure that all the NUC methods effectively compensate for the NU noise because their roughness metrics are lower than the roughness metric of the raw video. Note that both the proposed method and the Kalman filter exhibit the lowest roughness metric, which is almost equal to the roughness metric exhibited by the TPC method. Moreover, such excellent NUC capability is achieved after only 100 video frames (3.3 s), approximately.
Figure 7b shows the cosine similarity metric, as a function of the frame number, for all the NUC methods. It can be observed that all the NUC methods render compensated images that are very similar to those obtained by a TPC method. According to the cosine similarity, metric the NUC capability of the proposed algorithm is not only the best, but it is also achieved even faster than in the case of the roughness metric: It takes only 10 frames (0.33 s) to obtain a cosine similarity of 0.9997. We also note that the results of the two performance metrics are supported by the sample images taken from the IR video sequence shown in
Figure 8. It can be noticed that, as in
Figure 4, the proposed algorithm does not introduce NUC artifacts in the rendered images. Lastly, we highlight that the proposed method not only compensates for the NU noise but also produces a temperature-calibrated output, while the three scene-based NUC methods can only produce NUC images.
Finally, in
Table 1 we list the parameters and the number of offline and online calculations performed by each NUC algorithm used in this paper. In this implementation of our method,
and
.
Table 1 shows that, unlike the other three algorithms, the proposed method requires the calculation of an additional NUC parameter and the estimation of the HW model. Such calculations, however, are performed offline, do not demand heavy computations, and are not carried out in a pixelwise fashion. From
Table 1, it can be observed that the proposed algorithm imposes an online workload almost equal to the workload required by Scribner’s NUC method. In fact, for the
pixel window used here, only 9 more additions must be carried out compared to the Kalman filter method.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}