
Filtering Based Adaptive Visual Odometry Sensor Framework Robust to Blurred Images

Abstract
:1. Introduction
2. Related Work
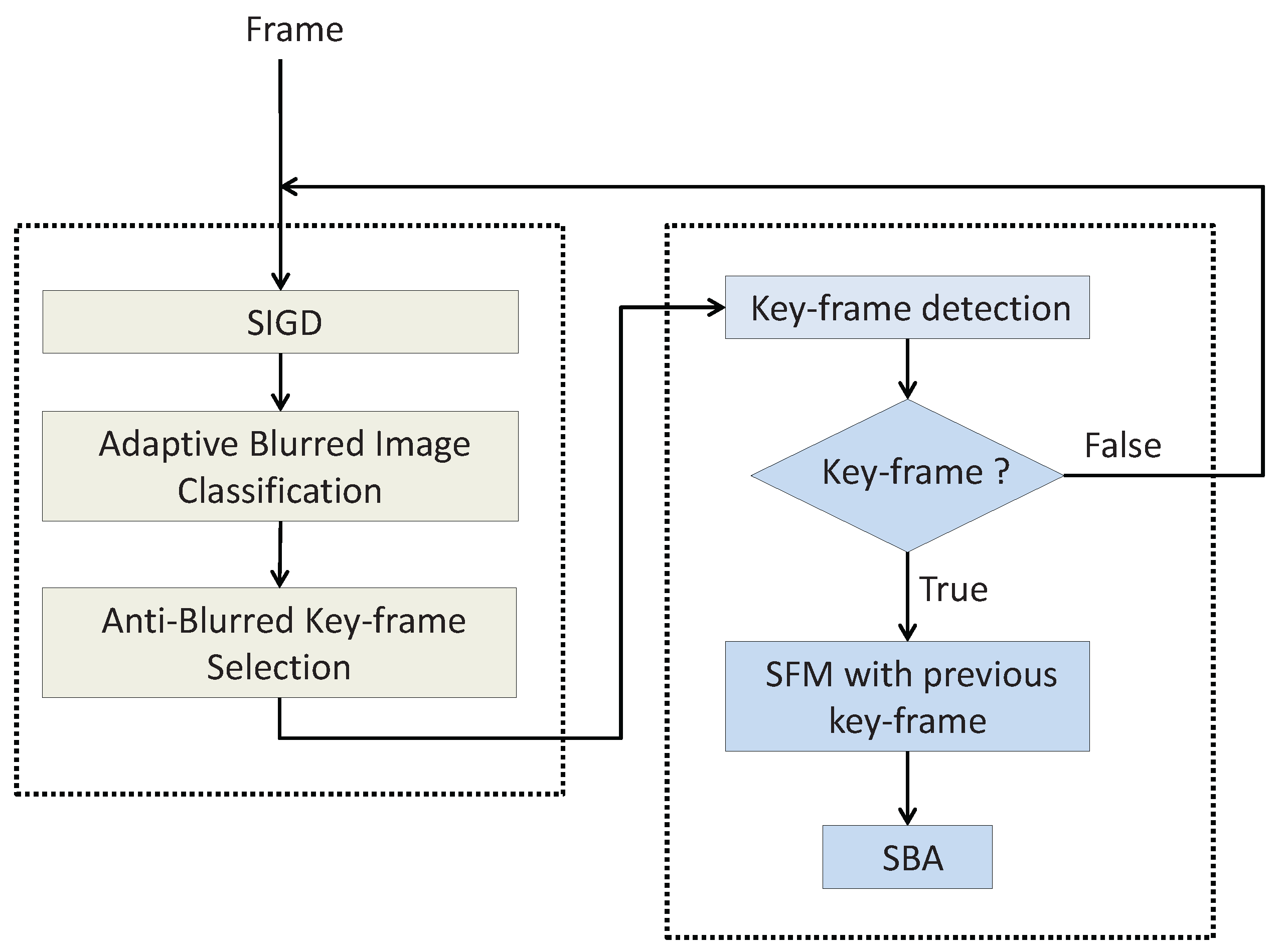
3. Visual Odometry Robust to Blurred Images
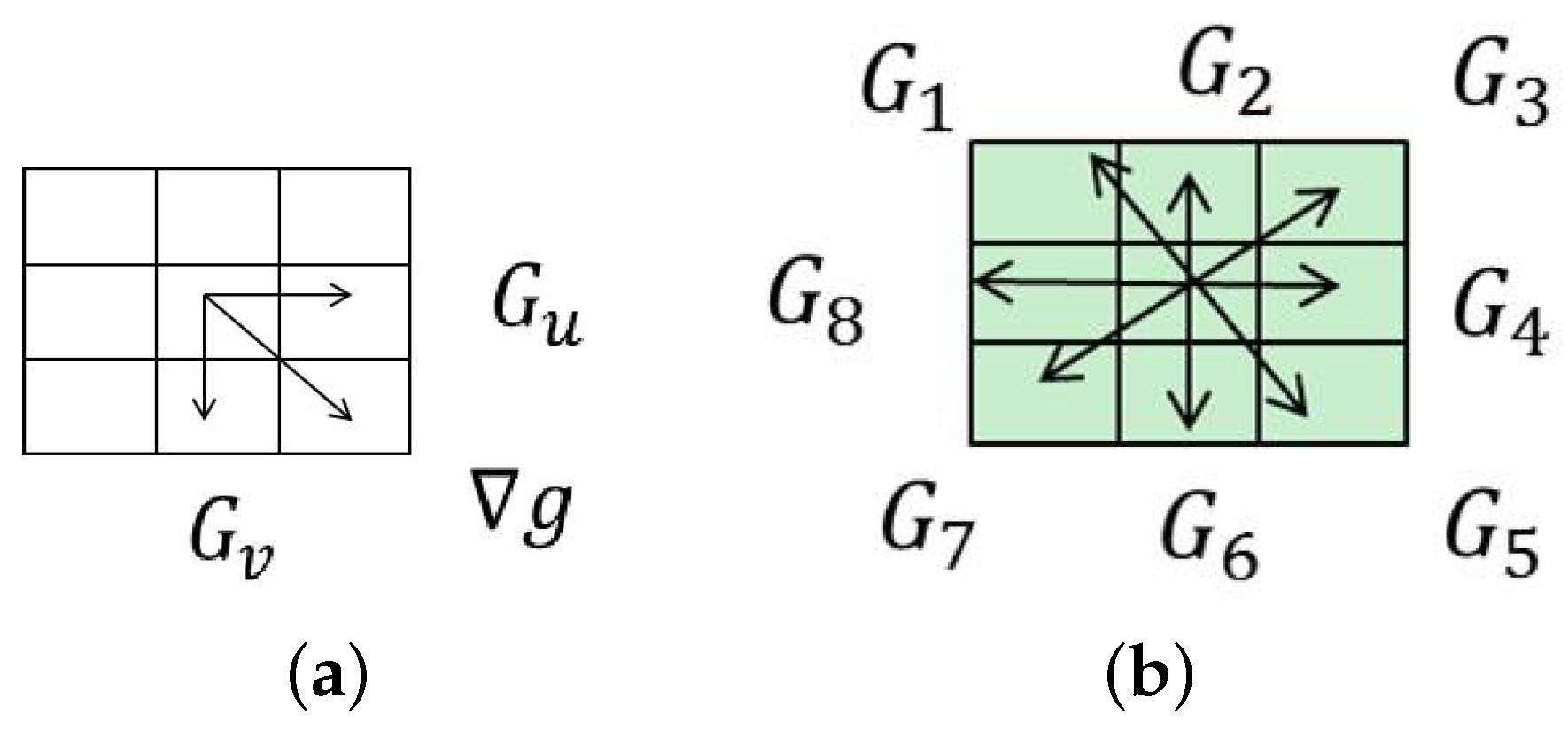
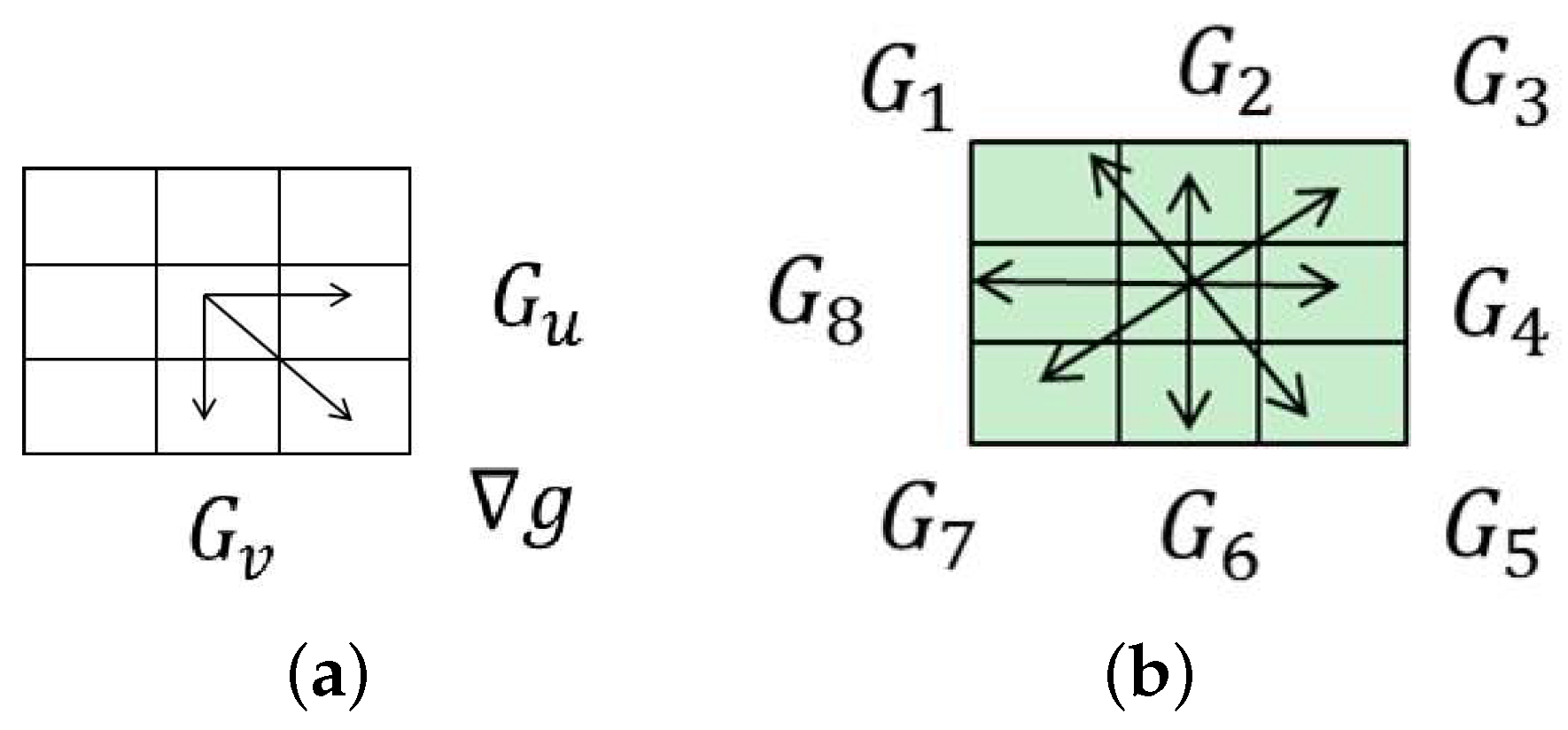
3.1. Blurred Degree Calculation with SIGD
| Algorithm 1: Blurred Degree Calculation with SIGD |
| Input: Image , Gradient threshold B Output: Blurred degree b 1 Detect M and N of 2 Convert to YUV color space, construct 3 For each pixel in , calculate its 4 Calculate blurred degree b of by Formulas (3) and (4) |
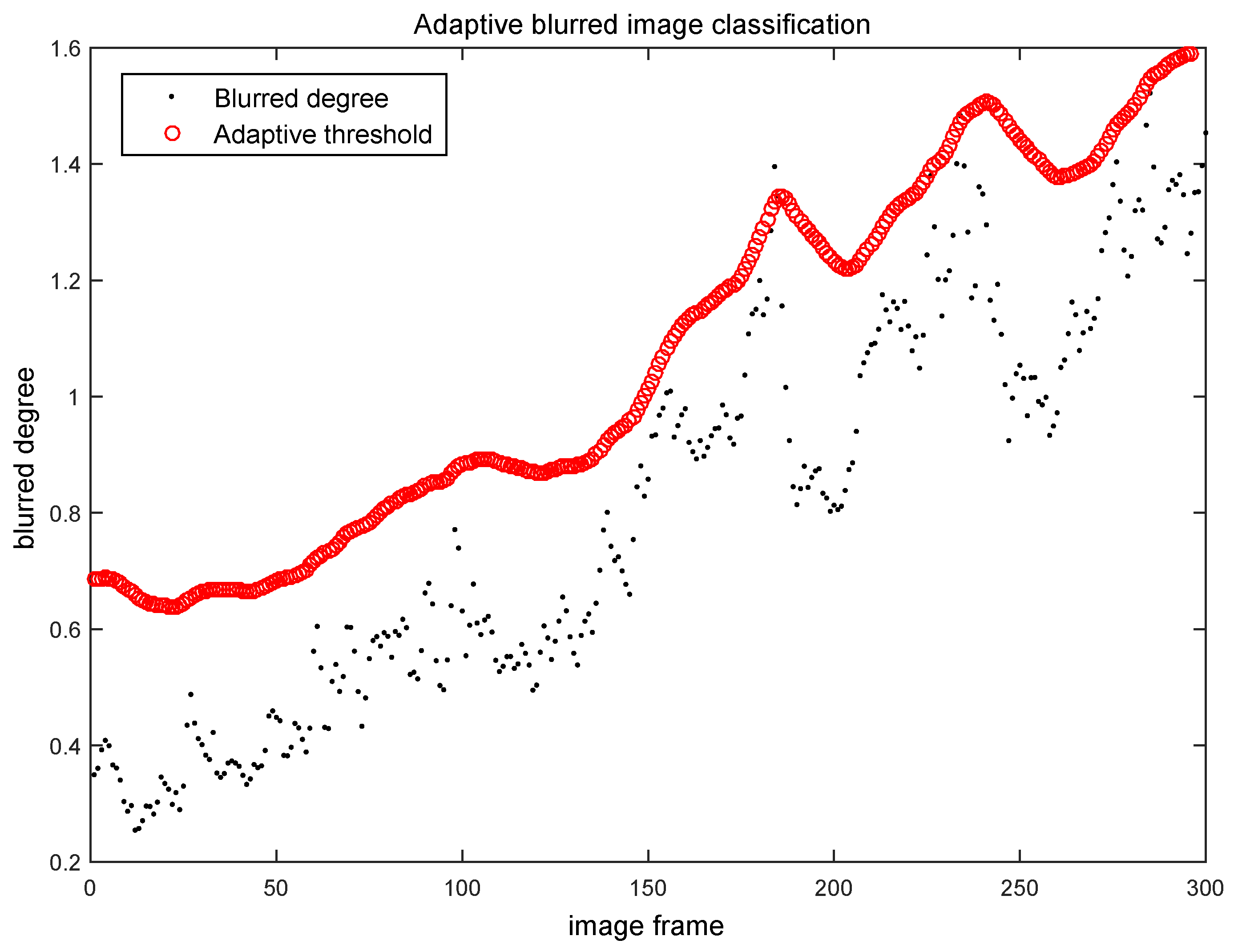
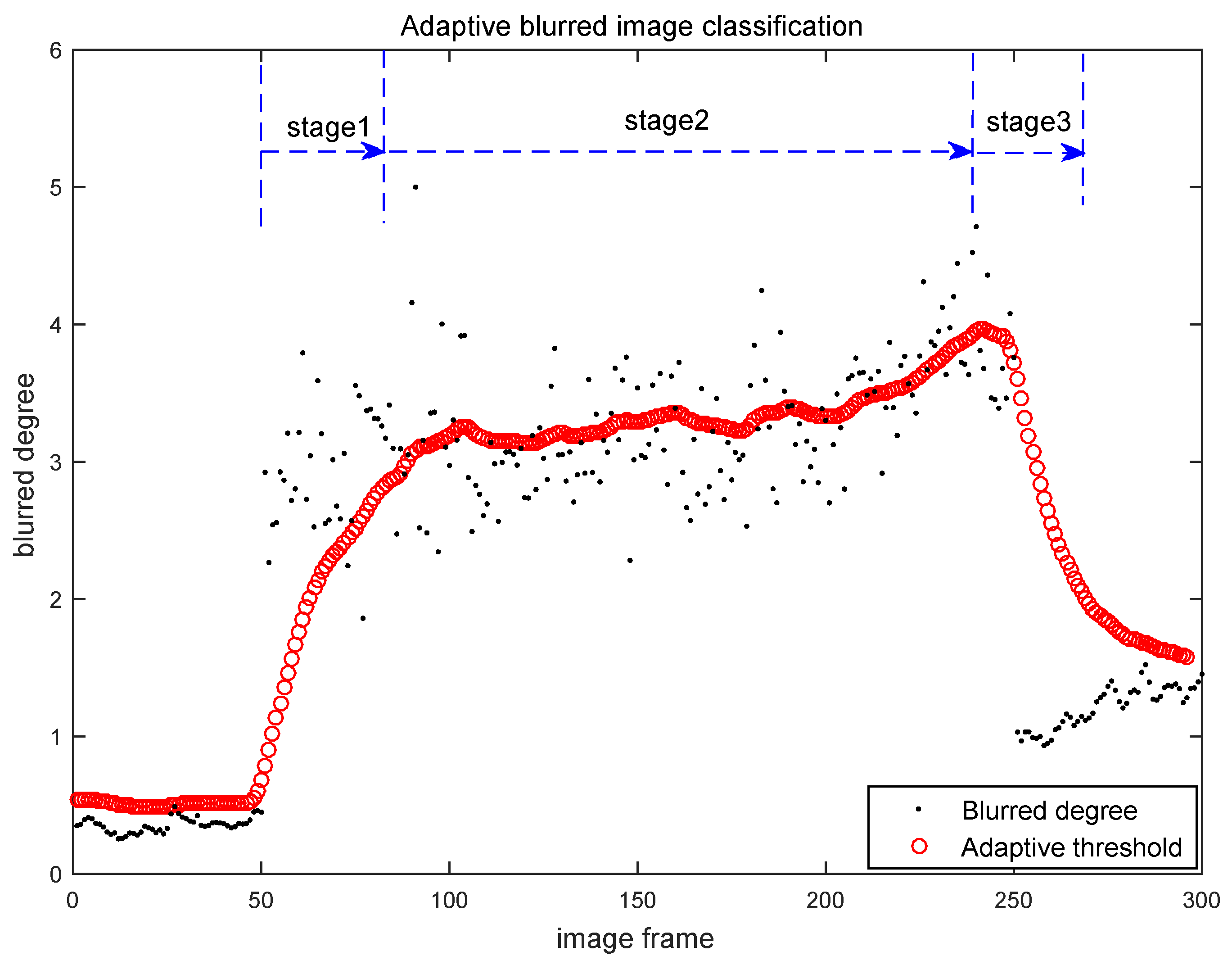
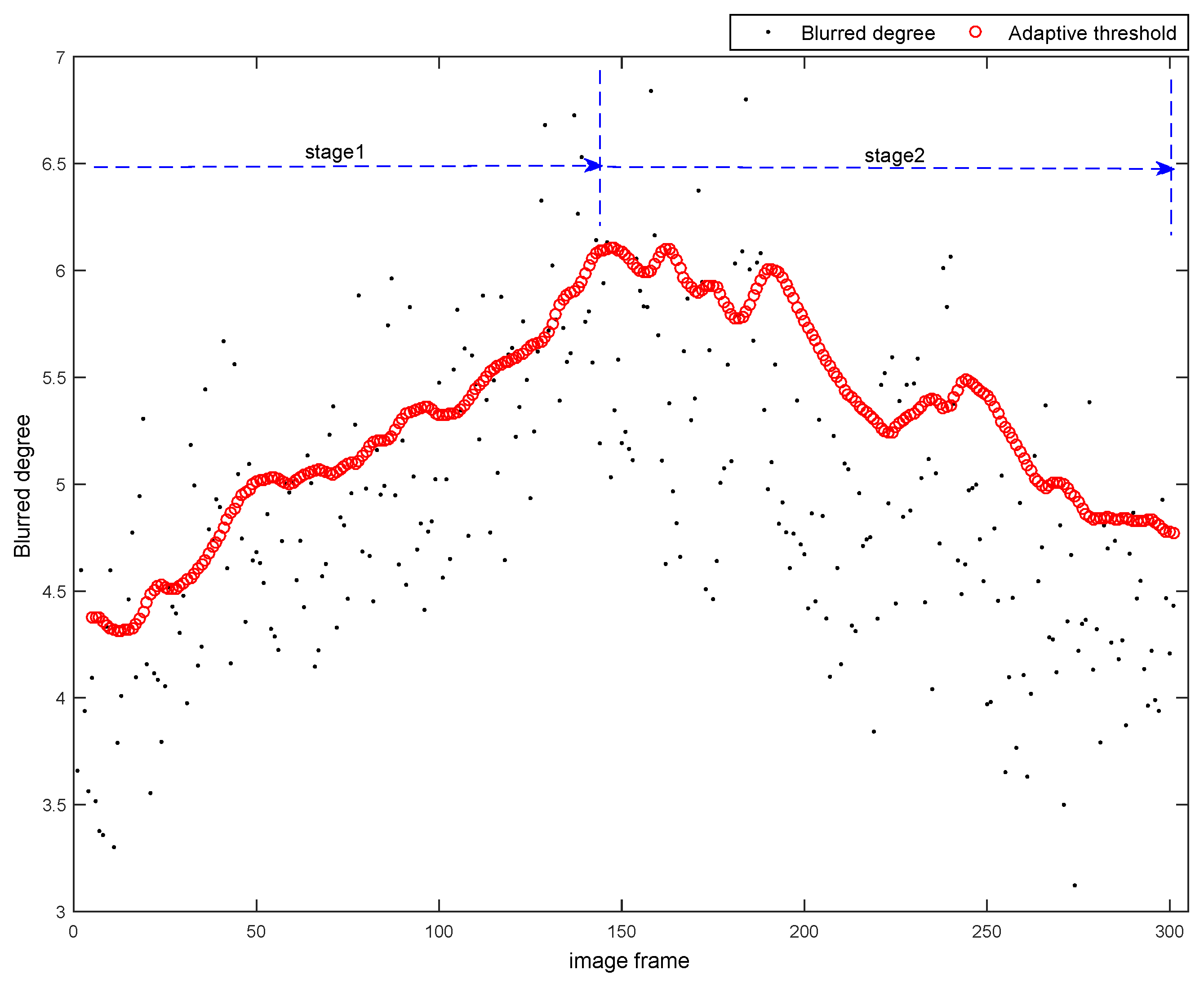
3.2. Adaptive Blurred Image Classification
| Algorithm 2: Adaptive Blurred Image Classification |
| Input: Image sequence 1 Initialization: scalar factor γ, window size S, bias parameters β, 2 for do 3 if then 4 5 else 6 if then 7 8 else 9 10 end 11 end 12 if then 13 is blurred 14 else 15 is clear 16 end 17 end |
3.3. Anti-Blurred Key-Frame Selection for Robust Visual Odometry
| Algorithm 3: Anti-blurred Key-frame Selection |
| Input: Image sequence , , D 1 for each do 2 Calculate blurred degree and its threshold 3 if then 4 Push(,C1) 5 else 6 Push(,C2) 7 end 8 end 9 if C1 NULL then 10 return Pop(C1) 11 else 12 Sort(C2) 13 return Pop(C2) 14 end |
4. Experiments
4.1. Performance Evaluation for SIGD
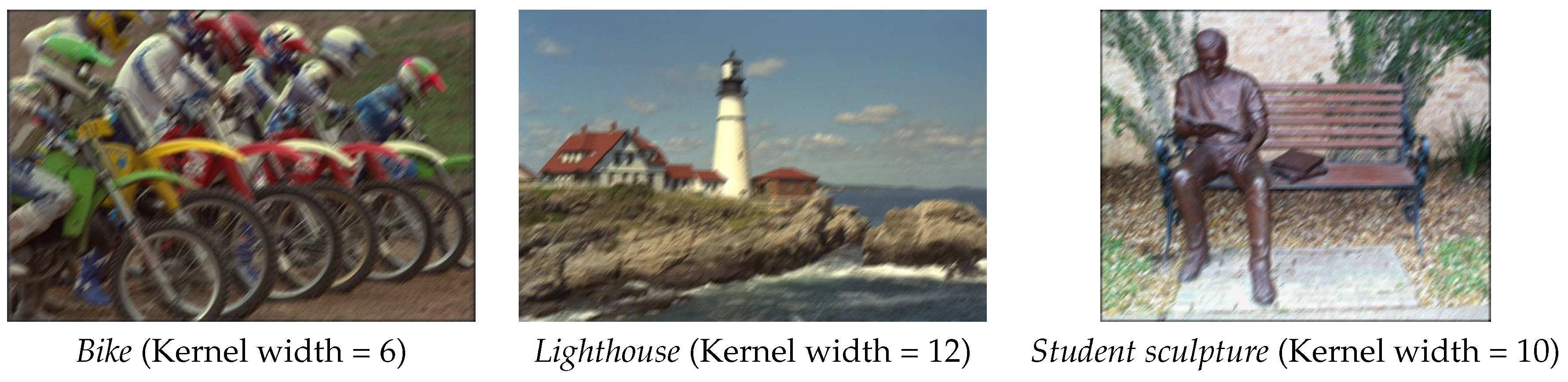
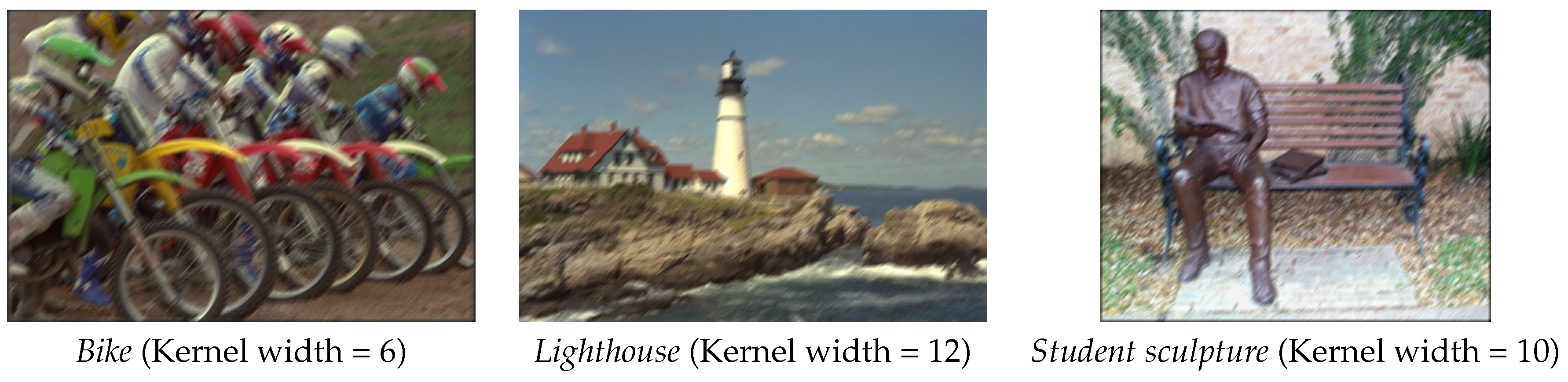
4.1.1. Linear Motion Blurred Image
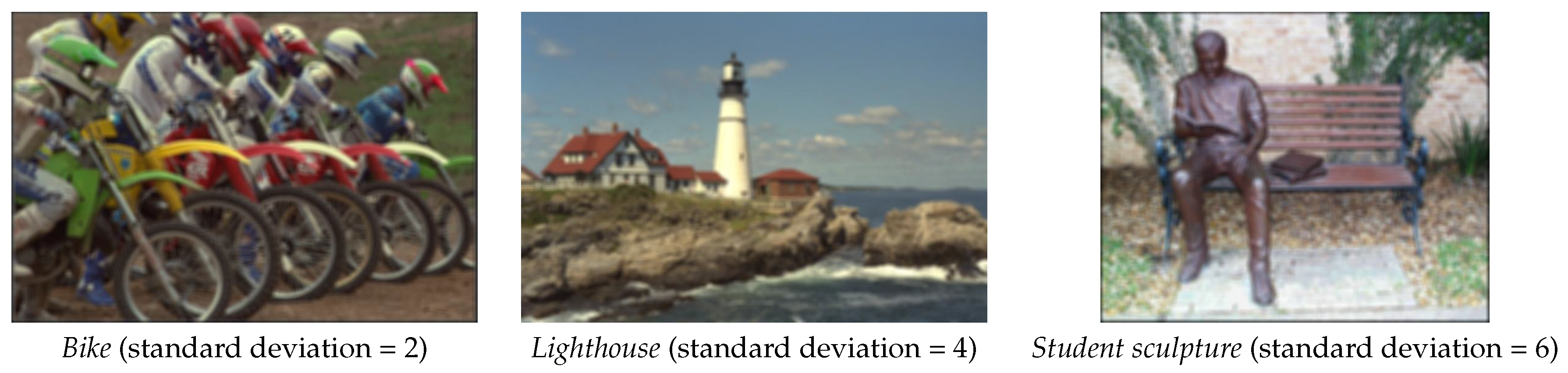
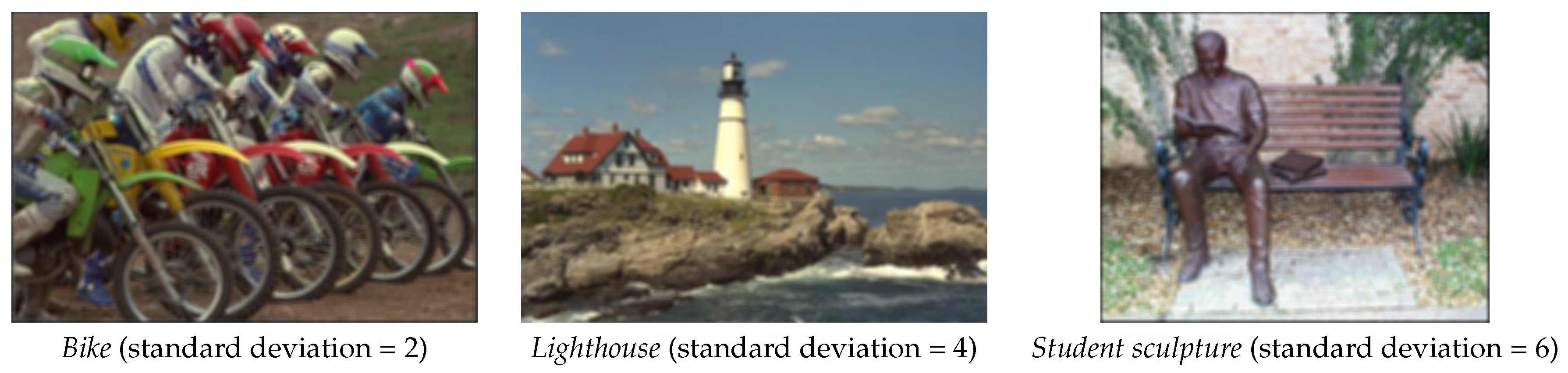
4.1.2. Gaussian Blurred Image
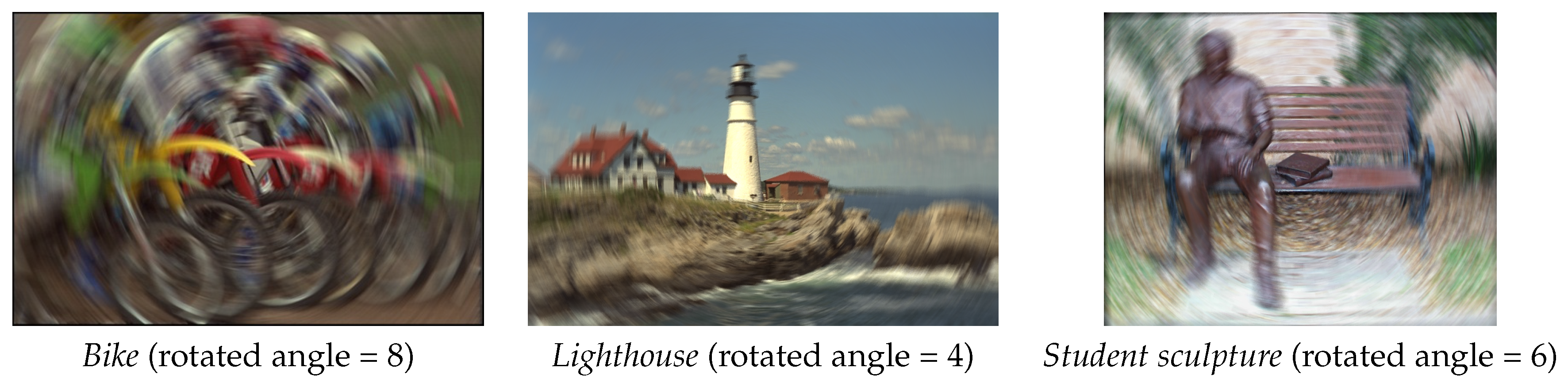
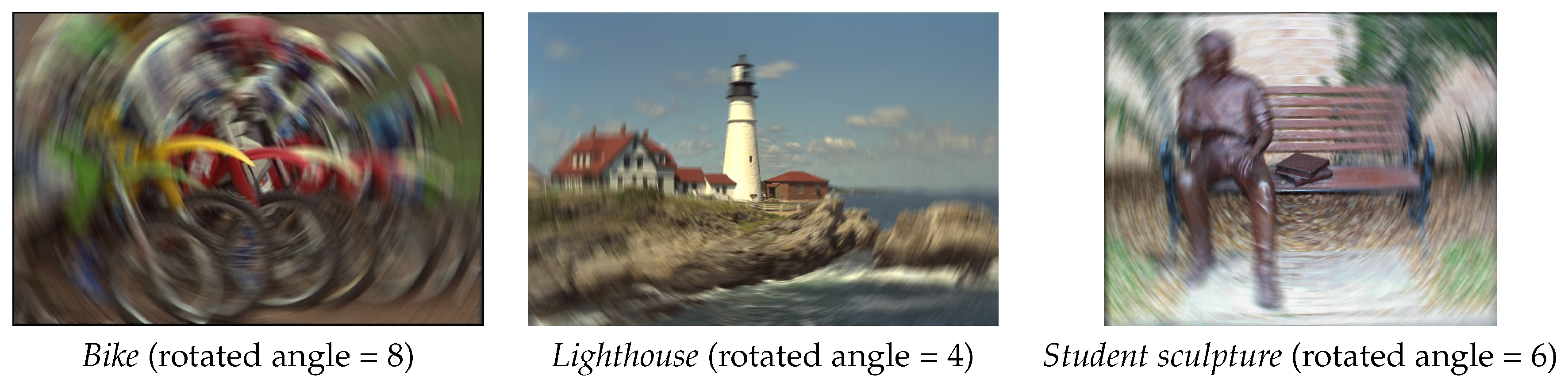
4.1.3. Rotation Motion Blurred Image
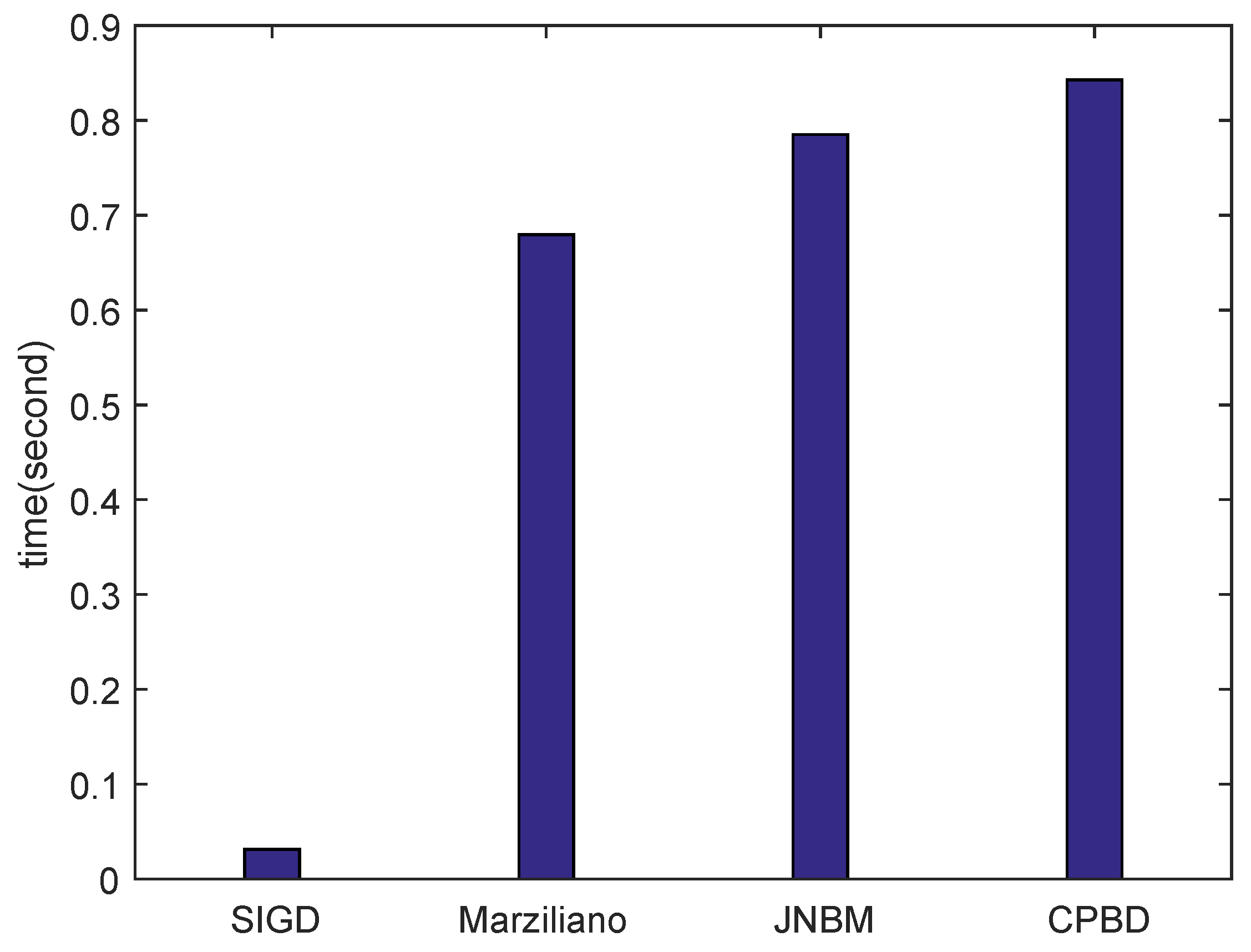
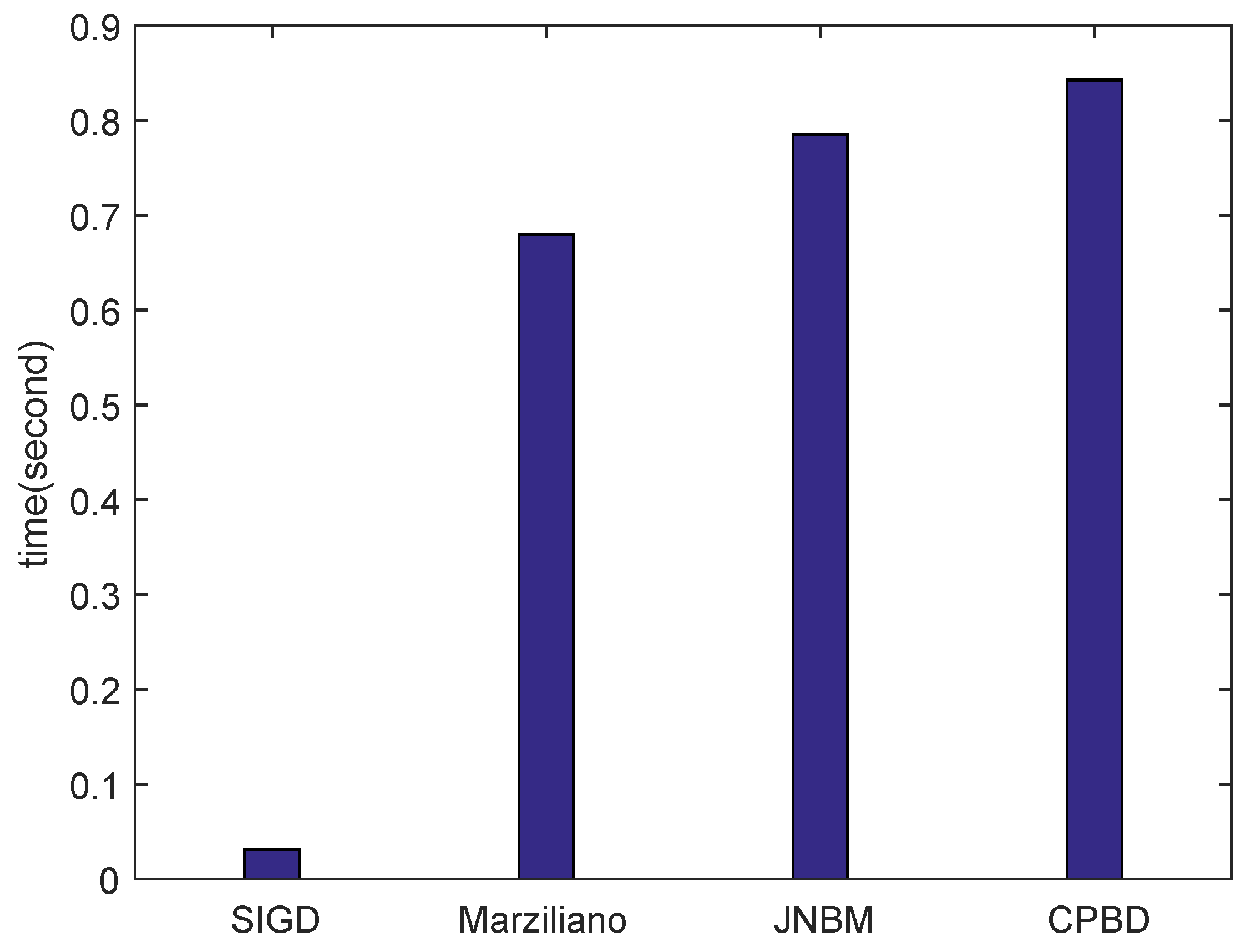
4.1.4. Computational Time Evaluation
4.2. Evaluation for Adaptive Blurred Image Classification
4.2.1. Experiments on Benchmark Datasets
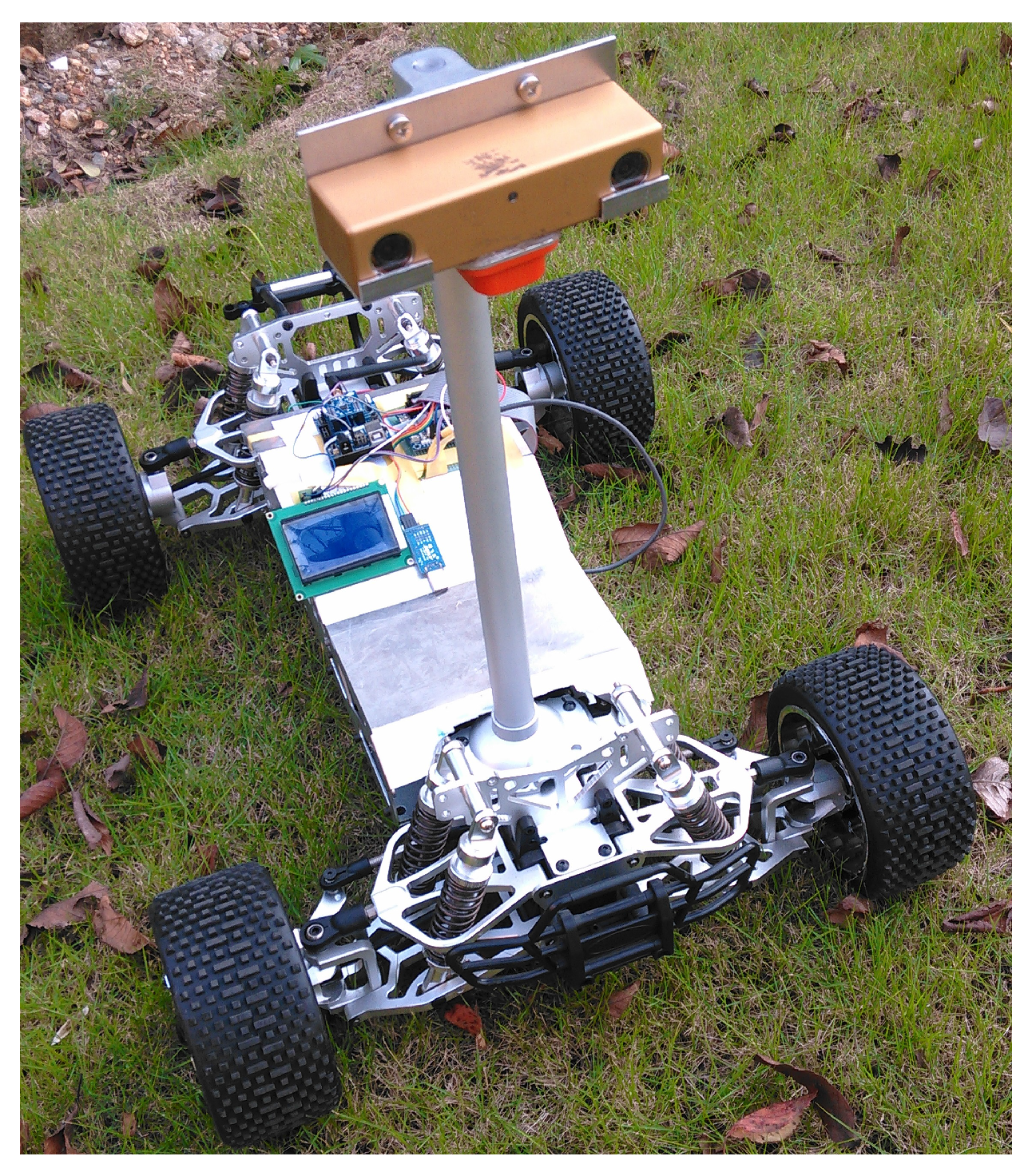
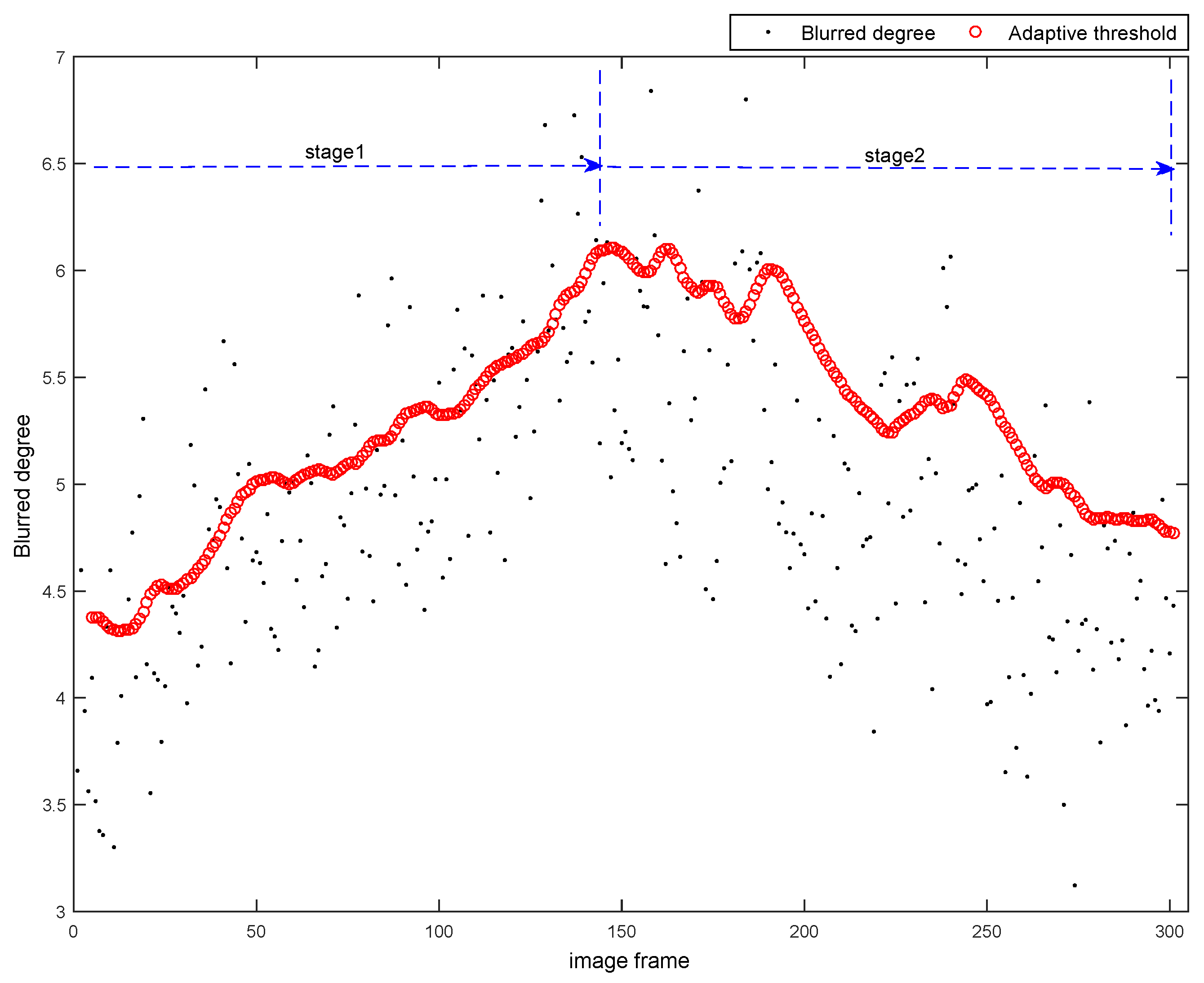
4.2.2. Experiments on Real Captured Datasets
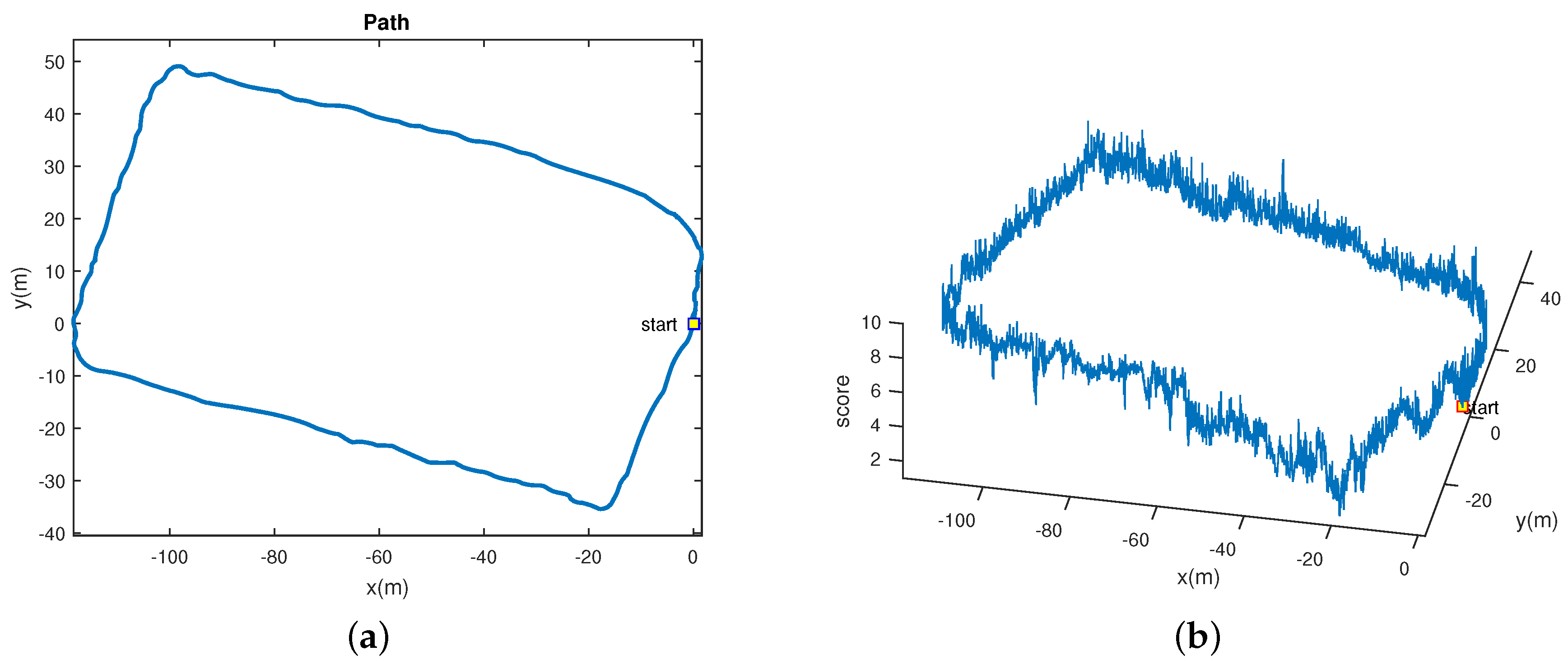
4.3. Evaluation for Visual Odometry with Blurred Images
- (a)
- All the image frames are fed to the VO algorithms. It means the motion is calculated with frame-by-frame based estimation, which is denoted as F-B-F (frame-by-frame) in the following experiments.
- (b)
- Only the key-frames are fed to the VO algorithms. It means the motion is calculated with key-frame based estimation, which is denoted as K-F (key-frame) in the following experiments.
- (c)
- The key-frames fed to the VO algorithms are selected by the algorithm 3 presented in this paper. It means the motion is calculated with anti-blurred key-frame selection based estimation, which is denoted as A-B (anti-blurred) in the following experiments.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| VO | Visual Odometry |
| SIGD | Small Image Gradient Distribution |
| SLAM | Simultaneous Localization and Mapping |
| SFM | Structure From Motion |
| SBA | Sparse Bundle Adjustment |
| SIFT | Scale-invariant Feature Transform |
| PSF | Point Spread Function |
| JNB | Just Noticeable Blur |
| CPBD | Cumulative Probability of Blur Detection |
References
- Azartash, H.; Banai, N.; Nguyen, T.Q. An integrated stereo visual odometry for robotic navigation. Robot. Auton. Syst. 2014, 62, 414–421. [Google Scholar] [CrossRef]
- Ciarfuglia, T.A.; Costante, G.; Valigi, P.; Ricci, E. Evaluation of non-geometric methods for visual odometry. Robot. Auton. Syst. 2014, 62, 1717–1730. [Google Scholar] [CrossRef]
- Scaramuzza, D.; Fraundorfer, F. Visual Odometry [Tutorial]. IEEE Robot. Automat. Mag. 2011, 18, 80–92. [Google Scholar] [CrossRef]
- Performance evaluation of feature detection and matching in stereo visual odometry. Neurocomputing 2013, 120, 380–390.
- Shan, Q.; Jia, J.; Agarwala, A. High-quality motion deblurring from a single image. ACM Trans. Graph. (TOG) 2008, 27, 73. [Google Scholar]
- Cho, S.; Lee, S. Fast motion deblurring. ACM Trans. Graph. (TOG) 2009, 28, 145. [Google Scholar] [CrossRef]
- Yuan, L.; Sun, J.; Quan, L.; Shum, H.Y. Image deblurring with blurred/noisy image pairs. ACM Trans. Graph. (TOG) 2007, 26, 1. [Google Scholar] [CrossRef]
- Raskar, R.; Agrawal, A.; Tumblin, J. Coded exposure photography: Motion deblurring using fluttered shutter. ACM Trans. Graph. (TOG) 2006, 25, 795–804. [Google Scholar] [CrossRef]
- Caviedes, J.; Oberti, F. A new sharpness metric based on local kurtosis, edge and energy information. Signal Process. Image Commun. 2004, 19, 147–161. [Google Scholar] [CrossRef]
- Marziliano, P.; Dufaux, F.; Winkler, S.; Ebrahimi, T. Perceptual blur and ringing metrics: Application to JPEG2000. Signal Process. Image Commun. 2004, 19, 163–172. [Google Scholar] [CrossRef]
- Ferzli, R.; Karam, L.J. A no-reference objective image sharpness metric based on the notion of just noticeable blur (JNB). IEEE Trans. Image Process. 2009, 18, 717–728. [Google Scholar] [CrossRef] [PubMed]
- Narvekar, N.D.; Karam, L.J. A no-reference image blur metric based on the cumulative probability of blur detection (CPBD). IEEE Trans. Image Process. 2011, 20, 2678–2683. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.S.; Kwon, J.; Lee, K.M. Simultaneous localization, mapping and deblurring. In Proceedings of the 2011 IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 1203–1210.
- Pretto, A.; Menegatti, E.; Bennewitz, M.; Burgard, W.; Pagello, E. A visual odometry framework robust to motion blur. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA’09), Kobe, Japan, 12–17 May 2009; pp. 2250–2257.
- Osswald, S.; Hornung, A.; Bennewitz, M. Learning reliable and efficient navigation with a humanoid. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 2375–2380.
- Seara, J.F.; Schmidt, G. Intelligent gaze control for vision-guided humanoid walking: methodological aspects. Robot. Auton. Syst. 2004, 48, 231–248. [Google Scholar] [CrossRef]
- Liu, Y.; Xiong, R.; Li, Y. Robust and Accurate Multiple-camera Pose Estimation Toward Robotic Applications. Int. J. Adv. Robot. Syst. 2014, 11. [Google Scholar] [CrossRef]
- Leutenegger, S.; Furgale, P.; Rabaud, V.; Chli, M.; Konolige, K.; Siegwart, R. Keyframe-Based Visual-Inertial SLAM using Nonlinear Optimization. In Proceedings of the Robotics: Science and Systems, Berlin, Germany, 24–28 June 2013.
- Klein, G.; Murray, D. Parallel Tracking and Mapping for Small AR Workspaces. In Proceedings of the Sixth IEEE and ACM International Symposium on Mixed and Augmented Reality (ISMAR’07), Nara, Japan, 13–16 November 2007.
- RVO. Available online: http://www.csc.zju.edu.cn/yliu/RVO/index.html (accessed on 15 June 2016).
- IVULab Software. Available online: http://lab.engineering.asu.edu/ivulab/software/ (accessed on 10 May 2015).
- Rohaly, A.M.; Libert, J.; Corriveau, P.; Webster, A. Final report from the video quality experts group on the validation of objective models of video quality assessment. ITU-T Stand. Contrib. COM 2000, 1, 9–80. [Google Scholar]
- NewCollege Data. Available online: http://www.robots.ox.ac.uk/NewCollegeData/ (accessed on 26 May 2015).
- LIBVISO2. Available online: http://www.cvlibs.net/software/libviso/ (accessed on 20 May 2015).
- Liu, Y.; Xiong, R.; Wang, Y.; Huang, H.; Xie, X.; Liu, X.; Zhang, G. Stereo Visual-Inertial Odometry with Multiple Kalman Filters Ensemble. IEEE Trans. on Ind. Electron. 2016, PP. [Google Scholar] [CrossRef]
- Agrawal, M.; Konolige, K.; Blas, M.R. Censure: Center surround extremas for realtime feature detection and matching. In Proceeding of 10th European Conference on Computer Vision, Marseille, France, 12–18 October 2008; pp. 102–115.
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. In Proceedings of the 9th European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; pp. 404–417.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kernel Width | 6 | 8 | 10 | 12 | 14 | |
|---|---|---|---|---|---|---|
| The image of Bike | SIGD | 3.5660 | 3.9611 | 4.1767 | 4.4435 | 4.7866 |
| Marziliano | 5.6197 | 6.4135 | 6.8119 | 7.3683 | 7.7798 | |
| JNBM | 3.8345 | 3.3307 | 3.2200 | 3.0336 | 2.9360 | |
| CPBD | 0.3723 | 0.3361 | 0.3182 | 0.2934 | 0.2690 | |
| The image of Lighthouse | SIGD | 5.1517 | 5.3465 | 5.4536 | 5.5646 | 5.6864 |
| Marziliano | 5.1273 | 5.4800 | 5.5926 | 5.6947 | 5.7927 | |
| JNBM | 4.6421 | 4.4427 | 4.1056 | 3.9374 | 3.6518 | |
| CPBD | 0.4227 | 0.3898 | 0.3893 | 0.3817 | 0.3592 | |
| The image of Student sculpture | SIGD | 0.8578 | 1.1141 | 1.2545 | 1.4393 | 1.6730 |
| Marziliano | 5.4835 | 5.8201 | 6.0052 | 6.2772 | 6.4567 | |
| JNBM | 2.7939 | 2.6311 | 2.4279 | 2.4126 | 2.3602 | |
| CPBD | 0.3627 | 0.3406 | 0.3336 | 0.3188 | 0.3137 |
| Standard Deviation | 2 | 3 | 4 | 5 | 6 | |
|---|---|---|---|---|---|---|
| The image of Bike | SIGD | 5.2605 | 5.8683 | 5.9879 | 6.0152 | 6.0260 |
| Marziliano | 7.8843 | 9.4496 | 9.7682 | 9.7548 | 9.8992 | |
| JNBM | 2.6744 | 2.3291 | 2.1694 | 2.1420 | 2.1104 | |
| CPBD | 0.1030 | 0.0369 | 0.0424 | 0.0516 | 0.0616 | |
| The image of Lighthouse | SIGD | 6.2327 | 6.7084 | 6.8292 | 6.8493 | 6.8612 |
| Marziliano | 7.3760 | 7.9183 | 7.8618 | 7.7431 | 7.7386 | |
| JNBM | 3.0152 | 2.5630 | 2.5478 | 2.5360 | 2.4688 | |
| CPBD | 0.0468 | 0.0197 | 0.0272 | 0.0345 | 0.0431 | |
| The image of Student sculpture | SIGD | 2.4278 | 3.4711 | 3.7582 | 3.8103 | 3.8267 |
| Marziliano | 7.7243 | 8.7017 | 8.9335 | 8.7914 | 8.7945 | |
| JNBM | 1.9063 | 1.7128 | 1.6439 | 1.6008 | 1.5961 | |
| CPBD | 0.0511 | 0.01936 | 0.0349 | 0.0494 | 0.0661 |
| Rotated Angle | 2 | 4 | 6 | 8 | 10 | |
|---|---|---|---|---|---|---|
| The image of Bike | SIGD | 4.0737 | 4.8269 | 5.4614 | 5.9372 | 6.3040 |
| Marziliano | 5.1828 | 5.9369 | 5.8818 | 5.7457 | 5.6422 | |
| JNBM | 3.7353 | 3.2516 | 2.8248 | 3.1235 | 3.4399 | |
| CPBD | 0.3969 | 0.3489 | 0.3459 | 0.3460 | 0.3517 | |
| The image of Lighthouse | SIGD | 5.0180 | 5.4615 | 5.8601 | 6.2249 | 6.5511 |
| Marziliano | 3.9805 | 4.1216 | 4.1470 | 4.2482 | 4.2178 | |
| JNBM | 6.3569 | 5.5806 | 5.2870 | 4.9411 | 5.2404 | |
| CPBD | 0.6158 | 0.5707 | 0.5565 | 0.5545 | 0.5584 | |
| The image of Student sculpture | SIGD | 0.6326 | 1.1201 | 1.5630 | 1.9852 | 2.4048 |
| Marziliano | 4.4000 | 4.6921 | 4.8826 | 5.0663 | 5.1374 | |
| JNBM | 3.4556 | 2.8975 | 2.5241 | 2.5212 | 2.4029 | |
| CPBD | 0.5386 | 0.5017 | 0.4871 | 0.4788 | 0.4748 |
| VO Algorithm + Mode | Closed-Loop Error (m) |
|---|---|
| Libviso + F-B-F | 3.0383 |
| Libviso + K-F | 2.9013 |
| Libviso + A-B | 1.7578 |
| SVO + F-B-F | 3.8892 |
| SVO + K-F | 3.5939 |
| SVO + A-B | 3.4804 |
| VO Algorithm + Mode | Closed-Loop Error (m) |
|---|---|
| Libviso + F-B-F | 21.2164 |
| Libviso + K-F | 14.0242 |
| Libviso + A-B | 6.5788 |
| SVO + F-B-F | 29.9466 |
| SVO + K-F | 14.3590 |
| SVO + A-B | 8.1435 |
| VO Algorithm + Mode | Closed-Loop Error (m) |
|---|---|
| S_SVO + AP | 6.1624 |
| S_SVO + A-B | 2.8586 |
| VO Algorithm + Mode | Closed-Loop Error (m) |
|---|---|
| S_SVO + AP | 28.8154 |
| S_SVO + A-B | 8.3554 |
| Algorithm | Average Time (ms) |
|---|---|
| SVO | 55 |
| libviso | 60 |
| SVO + A-B | 58.5 |
| libviso + A-B | 63.5 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; Liu, Y.; Xie, X.; Liao, Y.; Liu, X. Filtering Based Adaptive Visual Odometry Sensor Framework Robust to Blurred Images. Sensors 2016, 16, 1040. https://doi.org/10.3390/s16071040
Zhao H, Liu Y, Xie X, Liao Y, Liu X. Filtering Based Adaptive Visual Odometry Sensor Framework Robust to Blurred Images. Sensors. 2016; 16(7):1040. https://doi.org/10.3390/s16071040
Chicago/Turabian StyleZhao, Haiying, Yong Liu, Xiaojia Xie, Yiyi Liao, and Xixi Liu. 2016. "Filtering Based Adaptive Visual Odometry Sensor Framework Robust to Blurred Images" Sensors 16, no. 7: 1040. https://doi.org/10.3390/s16071040
APA StyleZhao, H., Liu, Y., Xie, X., Liao, Y., & Liu, X. (2016). Filtering Based Adaptive Visual Odometry Sensor Framework Robust to Blurred Images. Sensors, 16(7), 1040. https://doi.org/10.3390/s16071040