
GMTI for Squint Looking XTI-SAR with Rotatable Forward-Looking Array


Abstract
:1. Introduction
2. Rotatable Cross-Track Interferometry SAR (Ro-XTI-SAR)
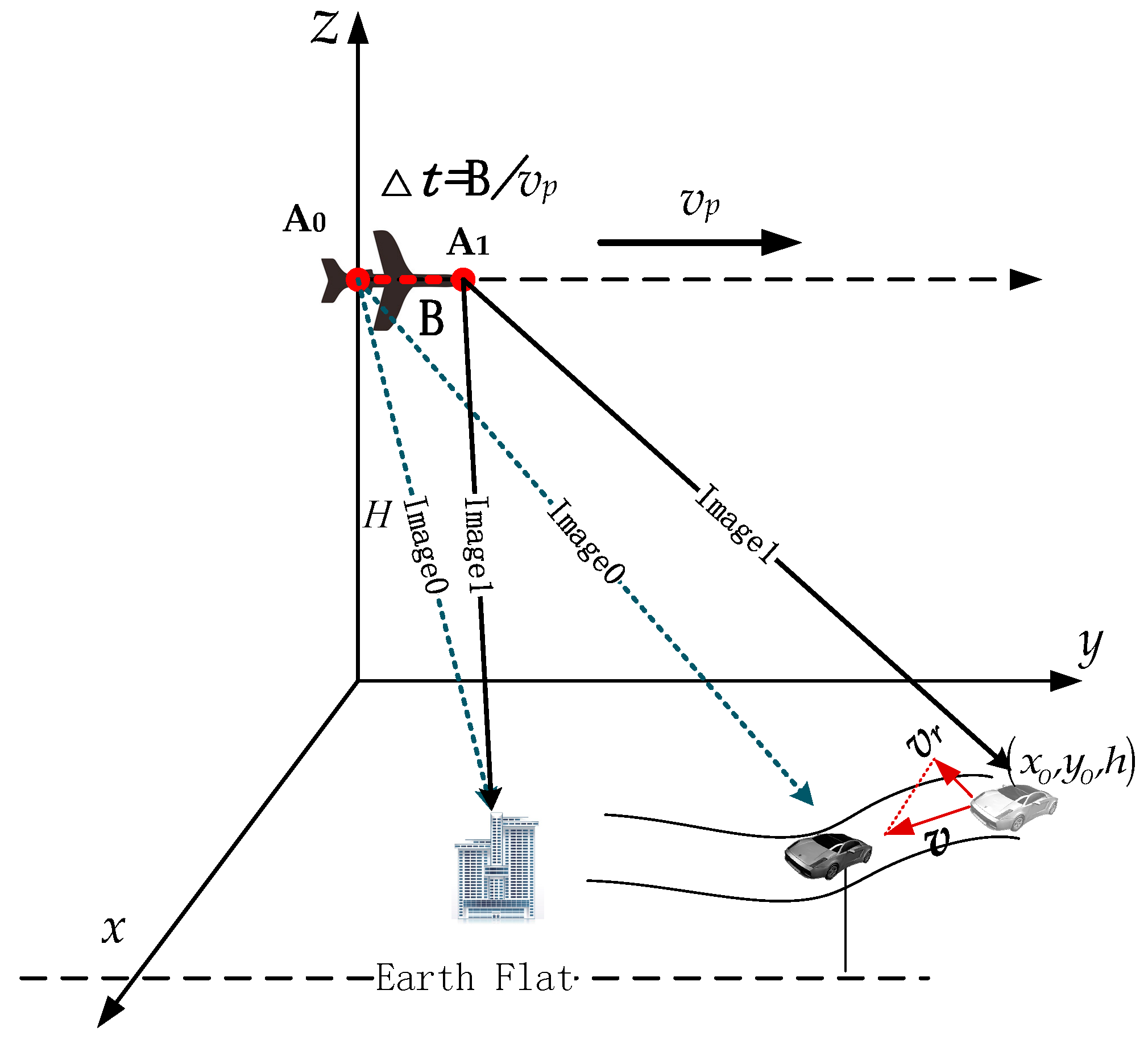
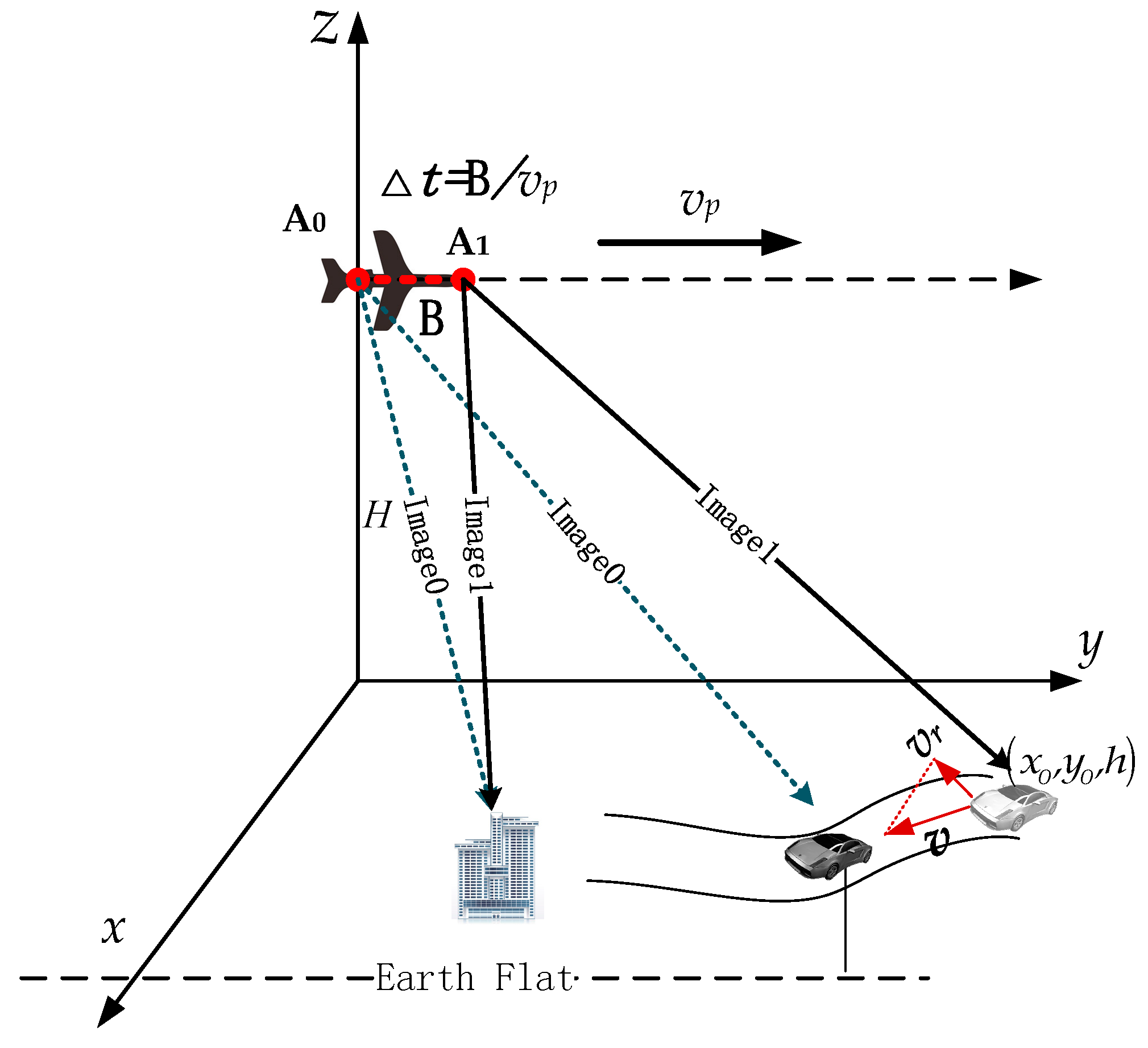
2.1. Along-Track Interferometry SAR (ATI-SAR)
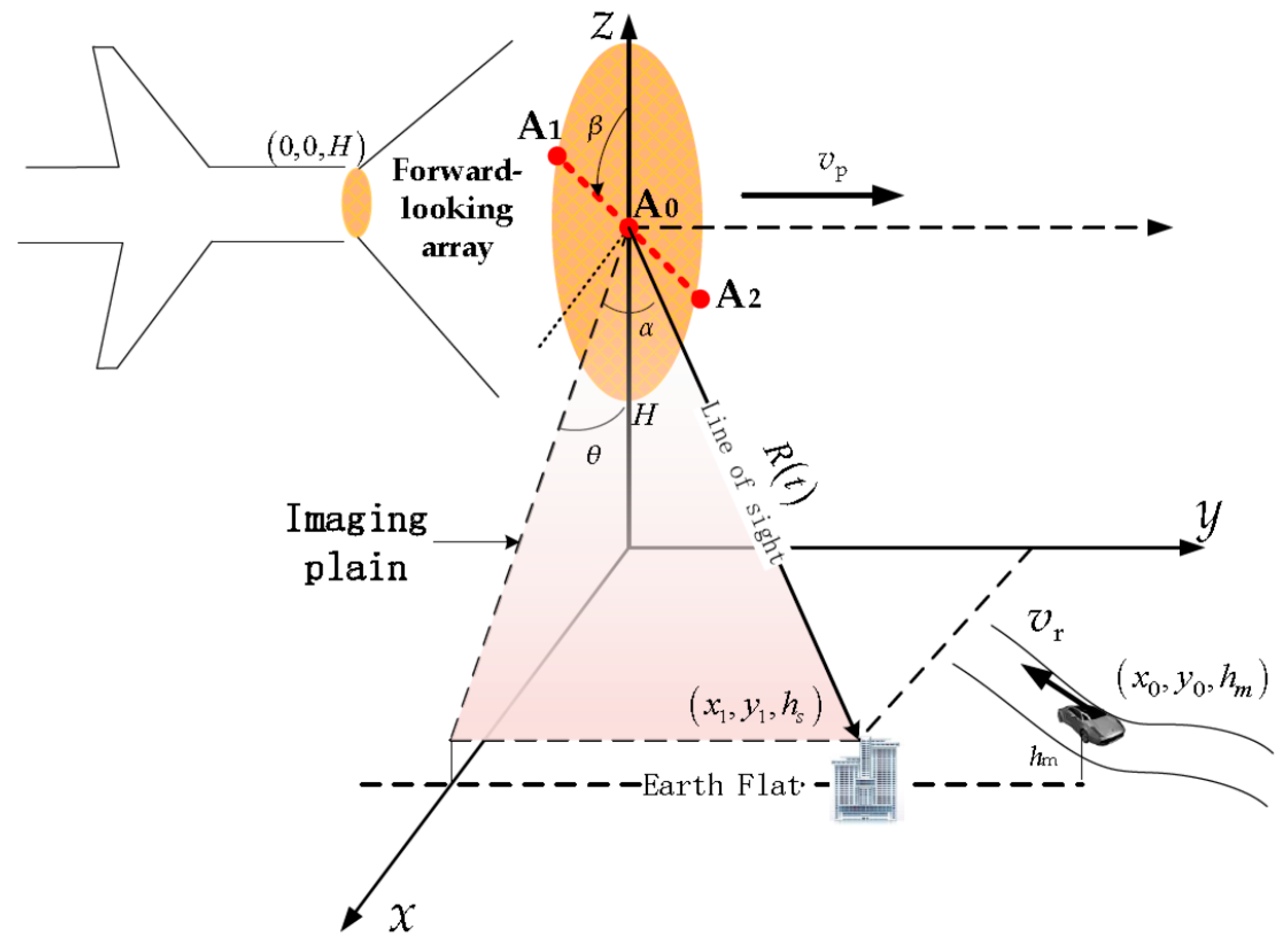
2.2. Cross Track Interferometry Phase in Squint Mode
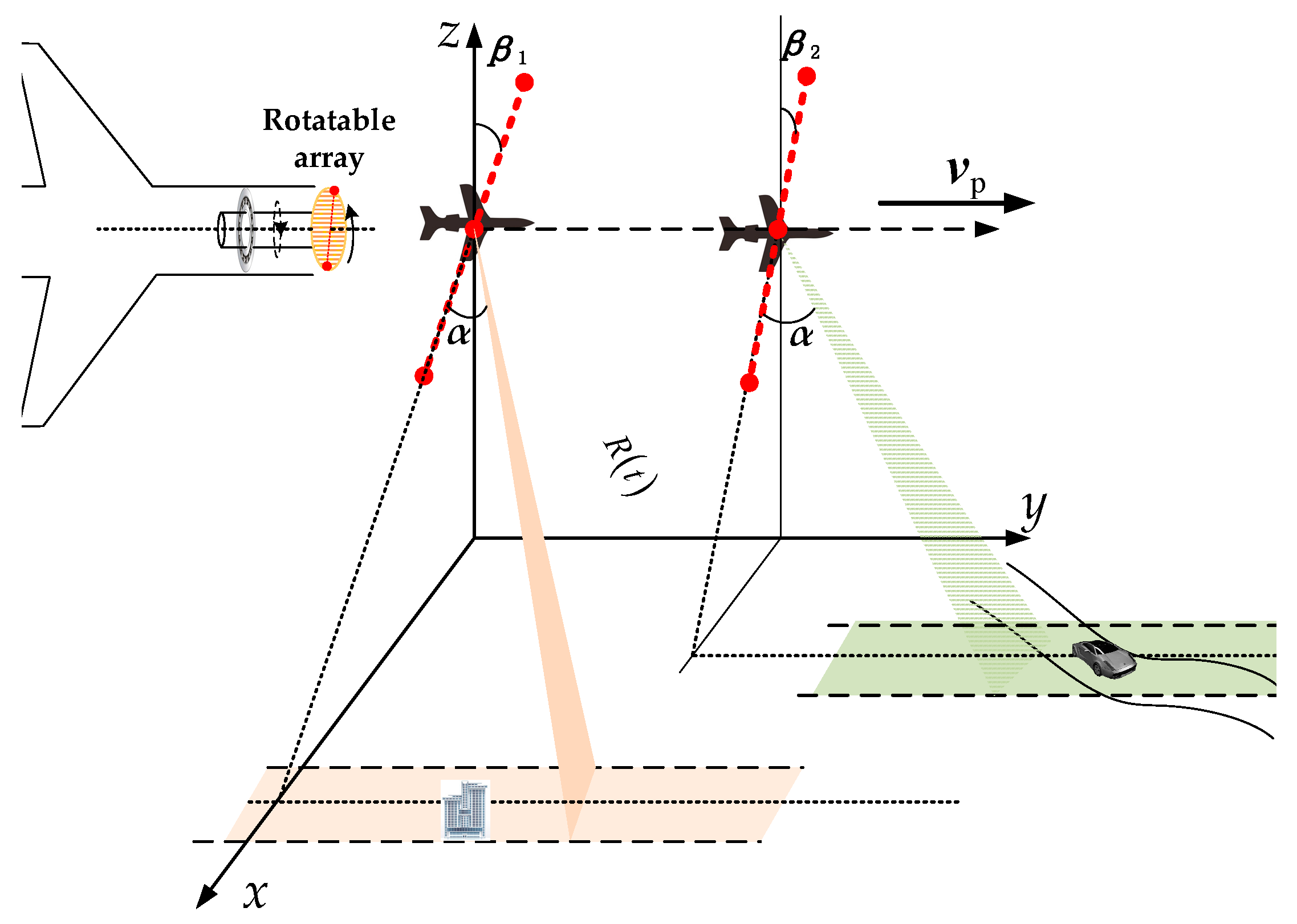
2.3. The Proposed Ro-XTI-SAR System for Clutter Suppression
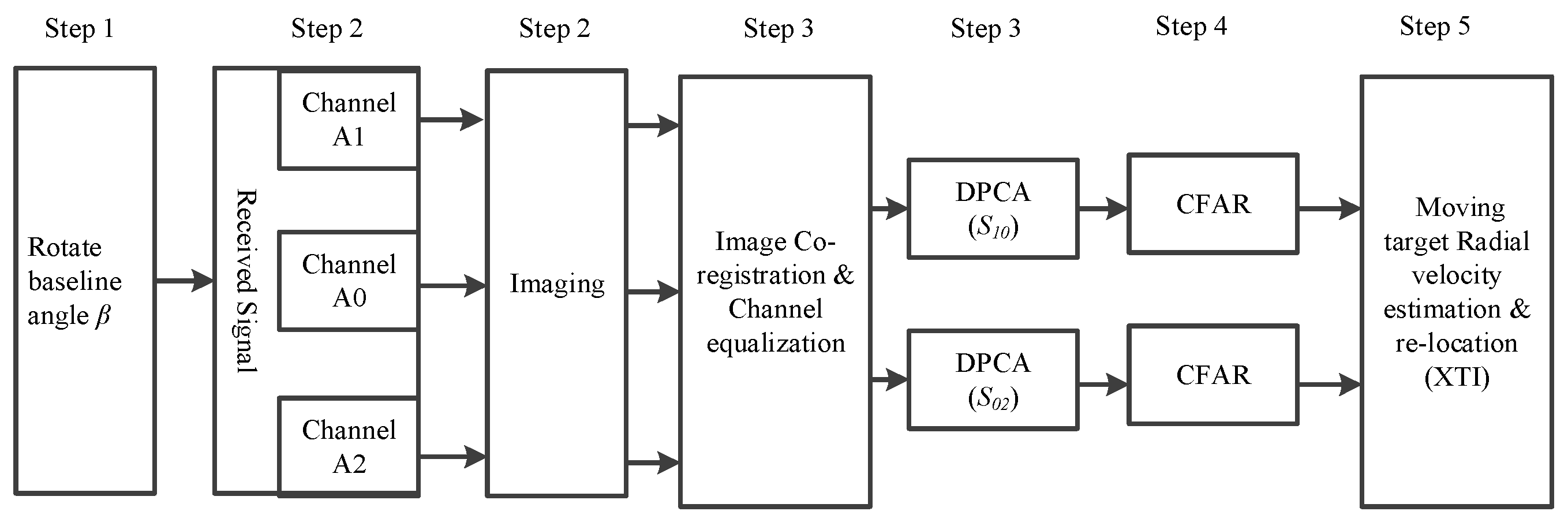
2.4. The Complete Flowchart of the Ro-XTI-SAR System
- Step 1:
- Determine the area of interest and then rotate the forward-looking array to make the baseline angle satisfy the condition .
- Step 2:
- Collect the reflection signal from the scenario and obtain the focused images of each channel by well used SAR scene reconstruction algorithms.
- Step 3:
- Image co-registration and channel balancing are done as the pre-processing before DPCA for images of different channels. Then, the outputs of A0 and A1 channels are used to generate the DPCA result , while the outputs of A0 and A2 channels are used to generate the DPCA result [26].
- Step 4:
- Moving target detection is accomplished by CFAR detector on the DPCA image.
- Step 5:
- Estimate the motion and position parameter of each detected targets as follows:
3. Performance Limitations and Design Rules of Ro-XTI-SAR
3.1. Performance Limatitions Due to the Incidence Angle Difference
3.2. The Proposed Ro-XTI-SAR Design Rules
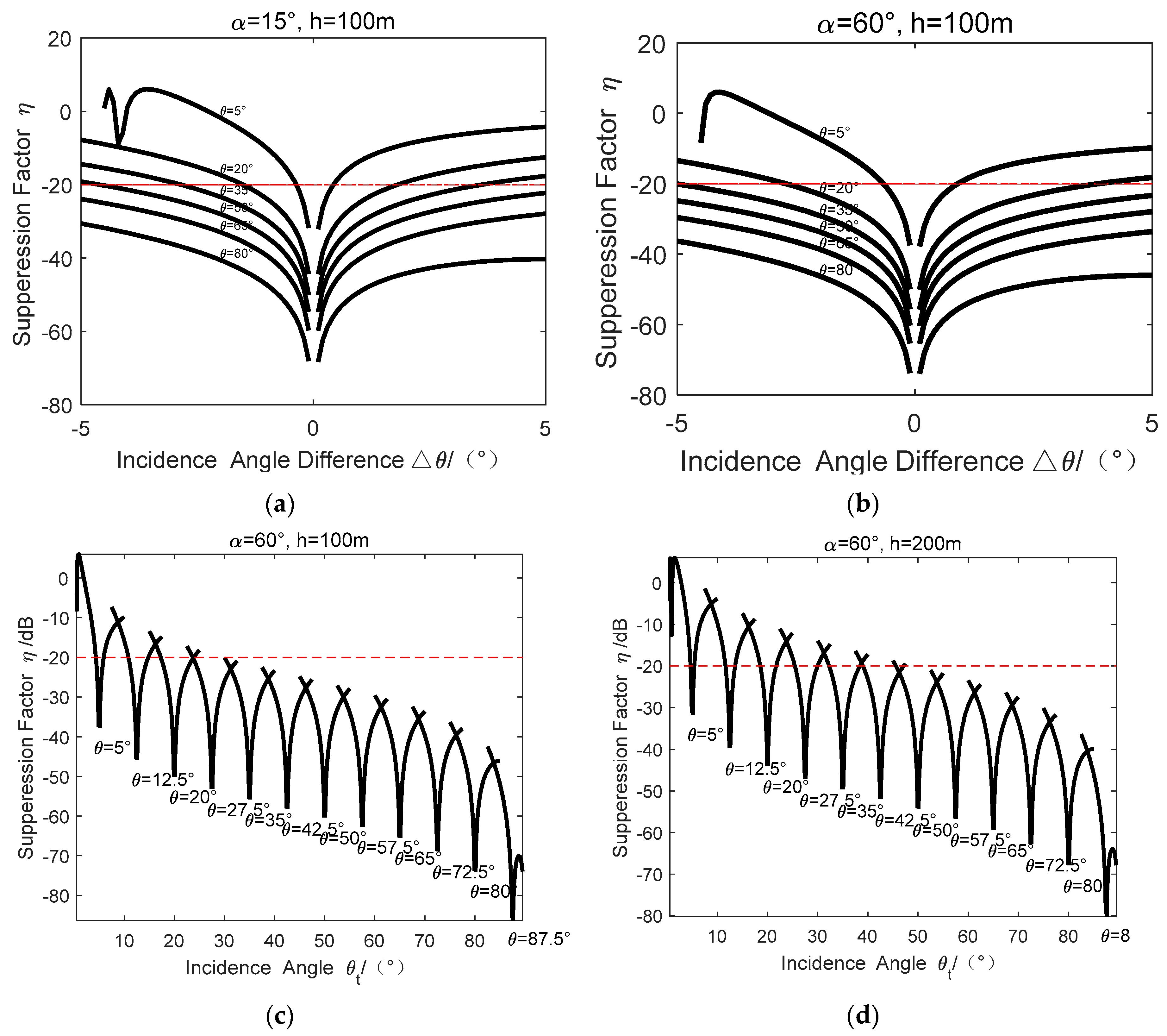
- (1)
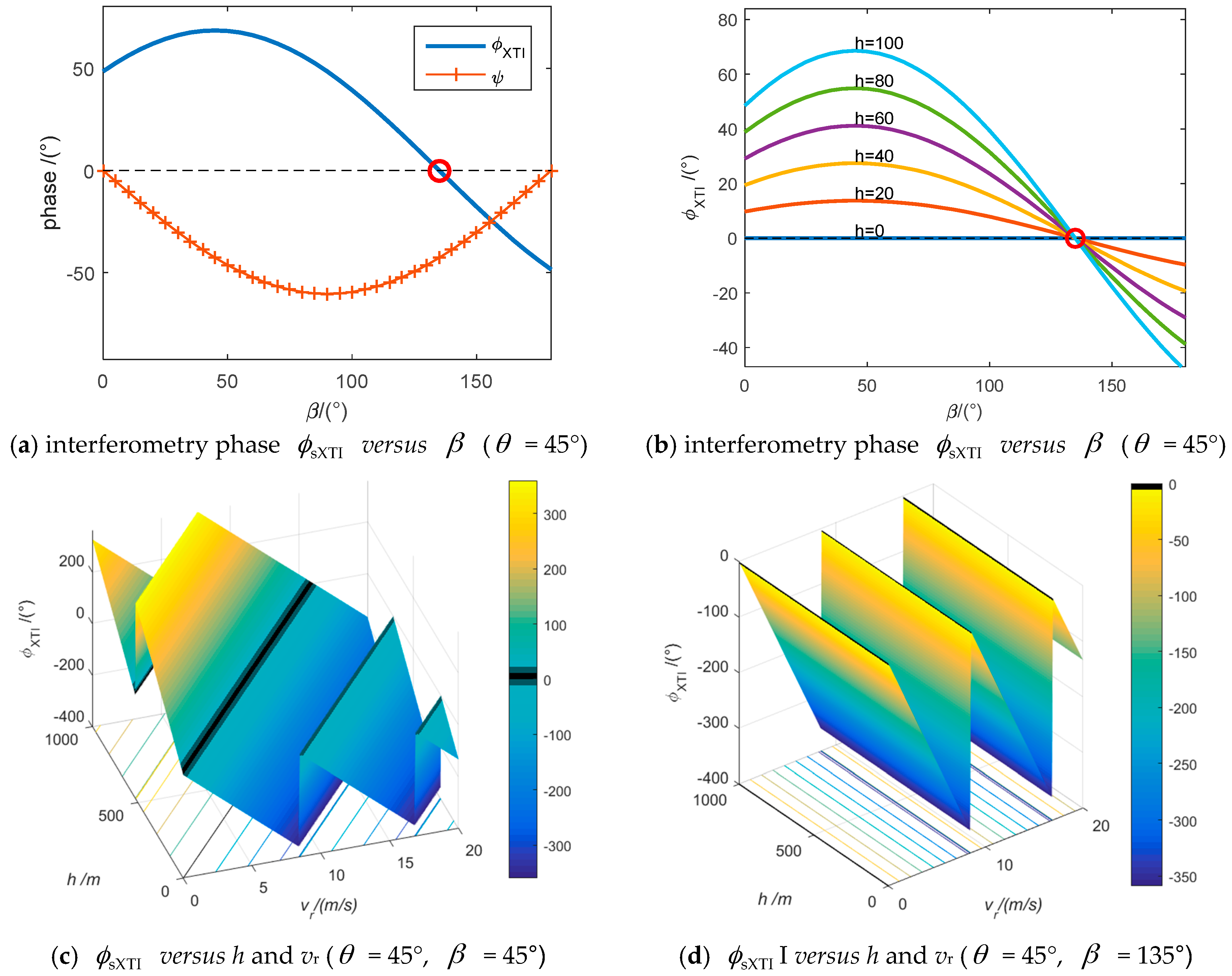
- From Figure 6a,b, it is shown that when the incidence angle difference = 0, we have the suppression factor . That is, the ground clutter can be cancelled successfully. However, for the other targets that have non-zero incidence angle differences, the suppression ability will be reduced. In addition, the clutter suppression ability will be improved with the increases of squint angle by comparing Figure 6a,b.
- (2)
- From Figure 6c,d, it is found that the suppression factor becomes better with the increases of the incidence angle accordingly.
- (3)
- With the parameters of Figure 6c with the target height of 100 m, when the incidence angle of the target is larger than 35°, the clutter suppression factors are all below −20 dB. Thus, this will usually be enough for the static clutter suppression. When the maximal terrain height increases to 200 m, the minimal incidence angle becomes 50°, as shown in Figure 6d. That is, clutter suppression ability will become worse with the increase of the target height.
4. Numerical Experiments of the Proposed Ro-XTI-SAR
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Goldstein, R.M.; Zebker, H.A. Interferometry radar measurement of ocean surface currents. Nature 1987, 328, 707–709. [Google Scholar] [CrossRef]
- Romeiser, R.; Thompson, D.R. Numerical study on the along-track interferometry radar imaging mechanism of oceanic surface currents. IEEE Trans. Geosci. Remote Sens. 2000, 38, 446–458. [Google Scholar] [CrossRef]
- Rignot, E.; Mouginot, J.; Scheuchl, B. Ice flow of the Antarctic ice sheet. Science 2010, 333, 1427–1430. [Google Scholar] [CrossRef] [PubMed]
- Suchandt, S.; Runge, H.; Breit, H.; Steinbrecher, U.; Kotenkov, A.; Balss, U. Automatic extraction of traffic flows using TerraSAR-X along-track interferometry. IEEE Trans. Geosci. Remote Sens. 2010, 48, 807–819. [Google Scholar] [CrossRef]
- Friedlander, B.; Porat, B. VSAR: A high-resolution radar system for ocean imaging. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 755–776. [Google Scholar] [CrossRef]
- Xu, J.; Li, G.; Peng, Y.N.; Xia, X.G.; Wang, Y.L. Parametric velocity synthetic aperture radar: Signal modelling and optimal methods. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2463–2480. [Google Scholar] [CrossRef]
- Xu, J.; Li, G.; Peng, Y.N.; Xia, X.G.; Wang, Y.L. Parametric velocity synthetic aperture radar: Multilook processing and its applications. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3488–3508. [Google Scholar] [CrossRef]
- Raney, R.K. Synthetic aperture imaging radar and moving targets. IEEE Trans. Aerosp. Electron. Syst. 1971, 7, 499–505. [Google Scholar] [CrossRef]
- Xu, J.; Zuo, Y.; Xia, B.; Xia, X.-G.; Peng, Y.-N.; Wang, Y.-L. Ground moving target signal analysis in complex image domain for multichannel SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 538–552. [Google Scholar] [CrossRef]
- Carande, R.E. Estimating ocean coherence time using dual-baseline interferometric synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 1994, 32, 846–854. [Google Scholar] [CrossRef]
- Wang, G.; Xia, X.-G.; Chen, V.C.; Fielder, R.L. Detection, location, and imaging of fast moving targets using multifrequency antenna array SAR. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 345–355. [Google Scholar] [CrossRef]
- Wen, J.; Liao, G.-S.; Zhu, S.-Q. A method for ground moving target indication and velocity estimation based on InSAR system. In Proceedings of the 2010 IEEE 10th International Conference on Signal Processing (ICSP), Beijing, China, 24–28 October 2010; pp. 2299–2302.
- Chen, S.-X.; Jiang, L.-M.; Xiang, M.-S.; Wei, L.-D.; Zhao, P.-B. Detection ground slow moving target by airborne along-track and across-track interferometry SAR. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; pp. 1623–1626.
- Li, Z.-F.; Wang, T.; Bao, Z.; Liao, G.-S. The optimal formation configurations for both GMTI and DEM using distributed satellites InSAR. J. Astronaut. 2004, 25, 642–648. [Google Scholar]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic aperture radar interferometry. IEEE Proc. 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Madsen, S.N.; Zebker, H.A.; Martin, J. Topographic mapping using radar interferometry: Processing techniques. IEEE Trans. Geosci. Remote Sens. 1993, 31, 246–256. [Google Scholar] [CrossRef]
- Li, F.; Goldstein, R.M. Studies of multi-baseline spaceborne interferometry synthetic aperture radars. IEEE Trans. Geosci. Remote Sens. 1990, 28, 88–97. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Zebker, H.A.; Werner, C.L. Satellite radar interferometry: Two-dimensional phase unwrapping. Radio Sci. 1988, 23, 713–720. [Google Scholar] [CrossRef]
- Kreyenkamp, O.; Klemm, R. Doppler compensation in forward-looking STAP radar. IEE Proc.-Radar Sonar Navig. 2001, 148, 253–258. [Google Scholar] [CrossRef]
- Wang, Y.-L.; Bao, Z.; Peng, Y.-N. STAP with medium PRF mode for non-side-looking airborne radar. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 609–620. [Google Scholar] [CrossRef]
- Yang, X.; Liu, Y.; Long, T. Geometry-aided subspace projection for mitigating range-dependence of the clutter spectrum in forward-looking airborne radar. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 6138–6141.
- Graham, L.C. Synthetic aperture radar for topographic mapping. IEEE Proc. 1974, 62, 763–768. [Google Scholar] [CrossRef]
- Zhang, J.-J.; Zhou, F.; Sun, G.-C.; Xing, M.-D.; Bao, Z. Study on Three Channels Squint SAR-GMTI System Based on the Forward-looking Airborne Radar. J. Electron. Inf. Technol. 2012, 34, 344–350. [Google Scholar] [CrossRef]
- Bara, M.; Scheiber, R.; Broquetas, A.; Moreira, A. Interferometry SAR signal analysis in the presence of squint. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2164–2178. [Google Scholar] [CrossRef]
- Suwa, K.; Yamamoto, K.; Tsuchida, M.; Wakayama, T.; Nakamura, S.; Endo, J.; Hayashi, K.; Hasegawa, H.; Nakano, Y. An experimental study on image based multi-channel SAR-GMTI algorithm. In Proceedings of the Synthetic Aperture Radar (APSAR), 2013 Asia-Pacific Conference on, Tsukuba, Japan, 23–27 September 2013; pp. 577–580.
- Cerutti-Maori, D.; Sikaneta, I. A generalization of DPCA processing for multichannel SAR/GMTI radars. IEEE Trans. Geosci. Remote Sens. 2013, 51, 560–572. [Google Scholar] [CrossRef]
- Yan, H.-C.; Xu, J.; Xia, X.-G.; Liu, F.; Peng, S.-B.; Zhang, X.-D.; Long, T. Wideband underwater sonar imaging via compressed sensing with scaling effect compensation. Sci. Chin. Inf. Sci. 2015, 58. [Google Scholar] [CrossRef]
- Meng, C.-Z.; Xu, J.; Xia, X.-G.; Long, T.; Mao, E.-K.; Yang, J.; Peng, Y.-N. MIMO-SAR waveforms separation in same frequency area based on virtual polarization filter. Sci. Chin. Inf. Sci. 2015, 58. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Para. | Target 1 | Target 2 | Target 3 | Target 4 | Target 5 | Target 6 | Mean Squ. Err. |
|---|---|---|---|---|---|---|---|
| (m) | 16,821 | 16,841 | 16,860 | 16,881 | 16,901 | 16,920 | 38.4 |
| (m) | 16,785 | 16,804 | 16,822 | 16,840 | 16,861 | 16,880 | |
| (m) | 9717 | 9717 | 9717 | 9717 | 9717 | 9717 | 2.18 |
| (m) | 9718 | 9716 | 9716 | 9721 | 9715 | 9714 | |
| (m) | 128 | 135 | 142 | 149 | 155 | 161 | 145.5 |
| (m) | -- | -- | -- | -- | -- | -- | |
| (m/s) | 1.7317 | 1.7323 | 1.7328 | 1.7333 | 1.7338 | 1.7343 | 0.060 |
| (m/s) | 1.6952 | 1.6716 | 1.6730 | 1.7144 | 1.6619 | 1.6485 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, K.; Xu, J.; Huang, Z.; Yao, D.; Long, T. GMTI for Squint Looking XTI-SAR with Rotatable Forward-Looking Array. Sensors 2016, 16, 873. https://doi.org/10.3390/s16060873
Jing K, Xu J, Huang Z, Yao D, Long T. GMTI for Squint Looking XTI-SAR with Rotatable Forward-Looking Array. Sensors. 2016; 16(6):873. https://doi.org/10.3390/s16060873
Chicago/Turabian StyleJing, Kai, Jia Xu, Zuzhen Huang, Di Yao, and Teng Long. 2016. "GMTI for Squint Looking XTI-SAR with Rotatable Forward-Looking Array" Sensors 16, no. 6: 873. https://doi.org/10.3390/s16060873