
Rotation Matrix Method Based on Ambiguity Function for GNSS Attitude Determination

Abstract
:1. Introduction
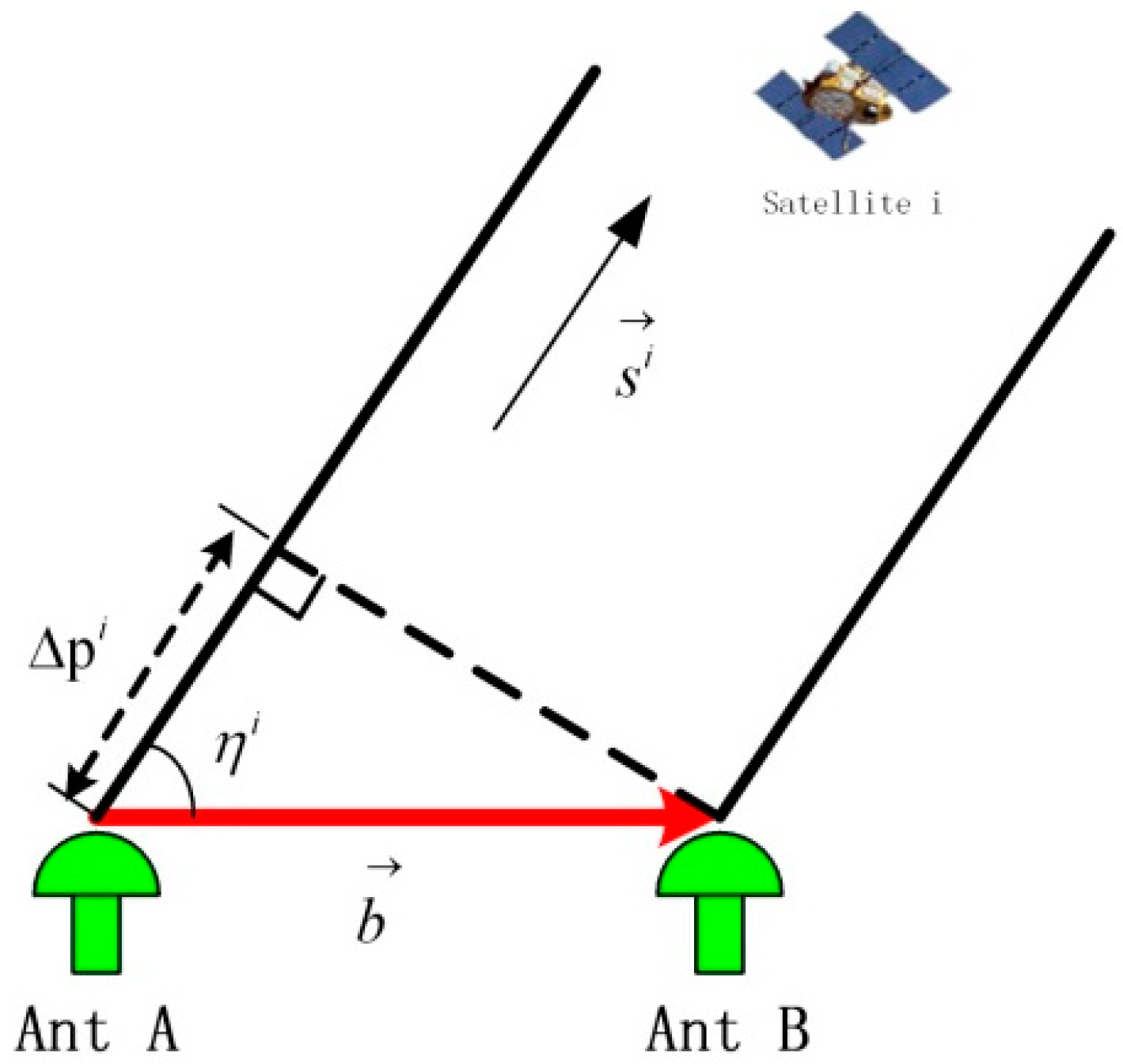
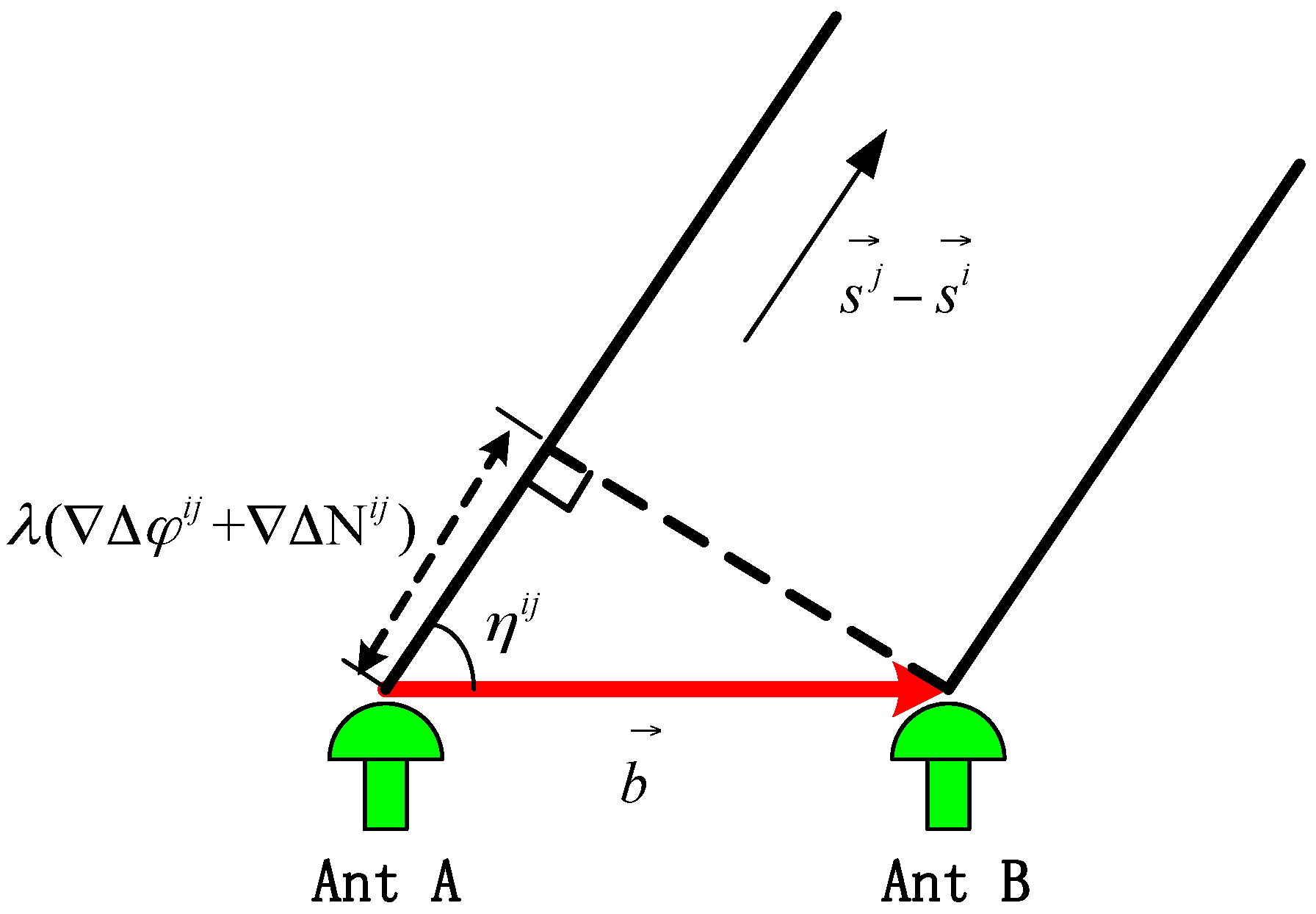
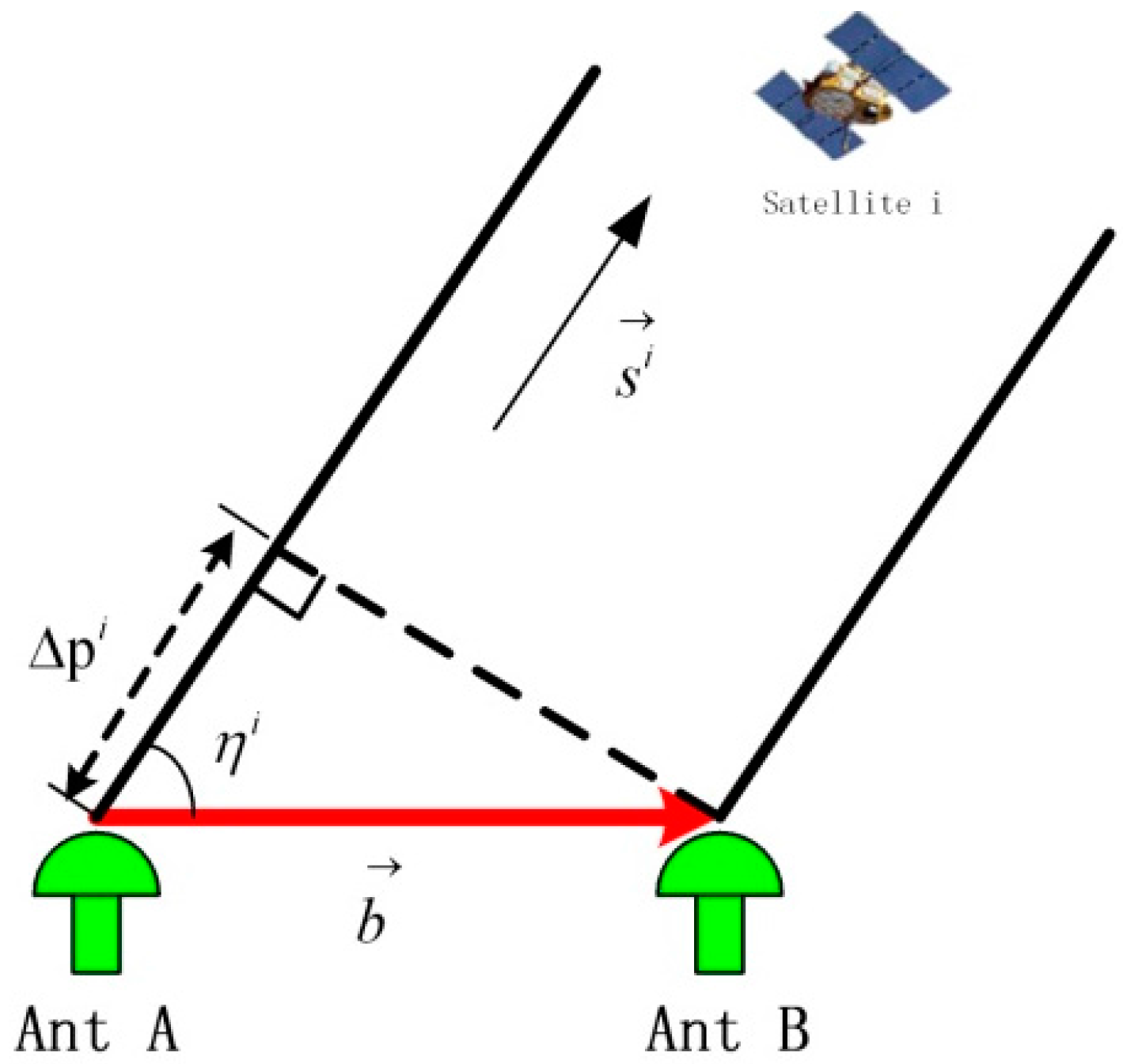
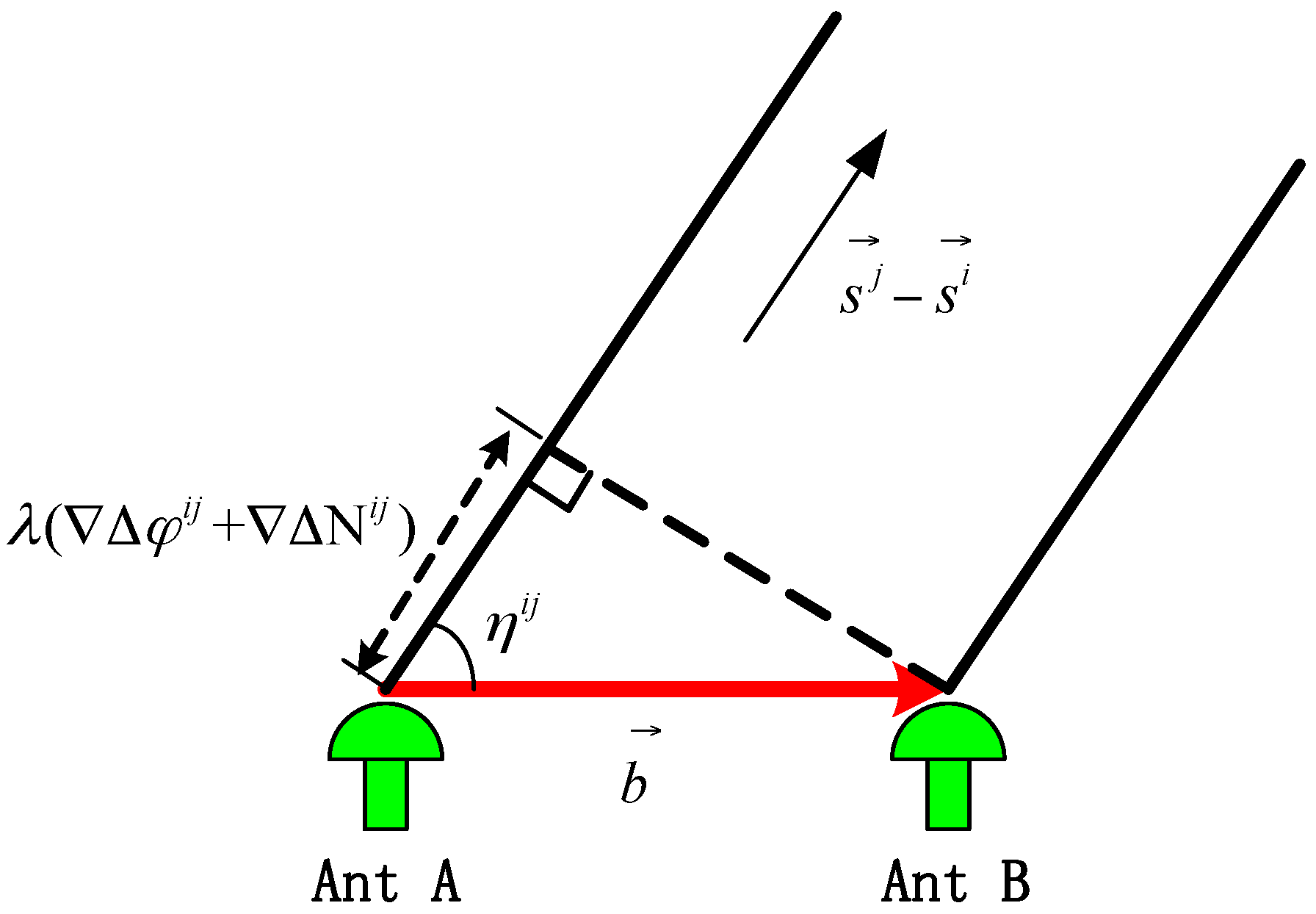
2. Model of GNSS Attitude Determination
3. Rotation Matrix Method in Resolving Equations
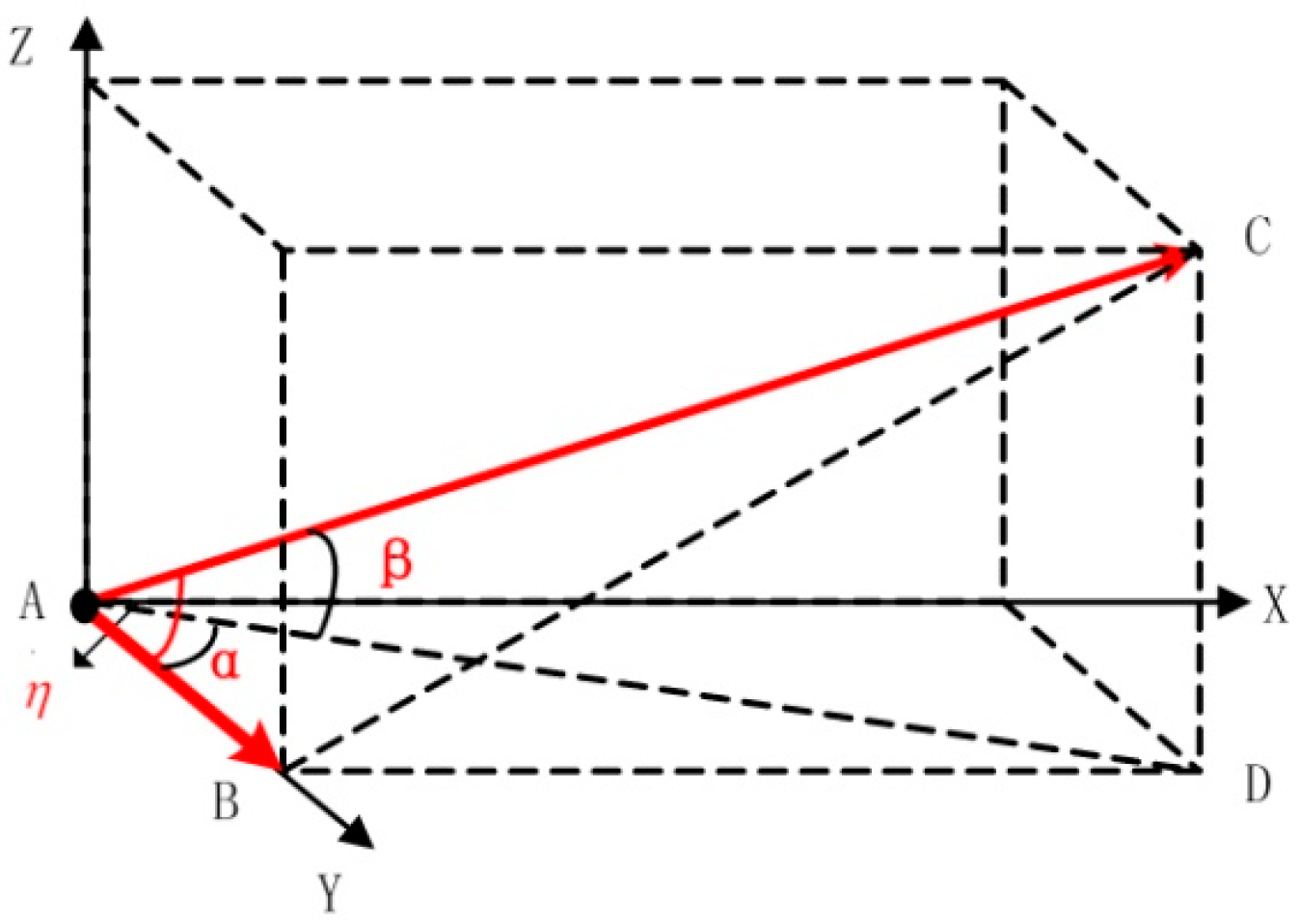
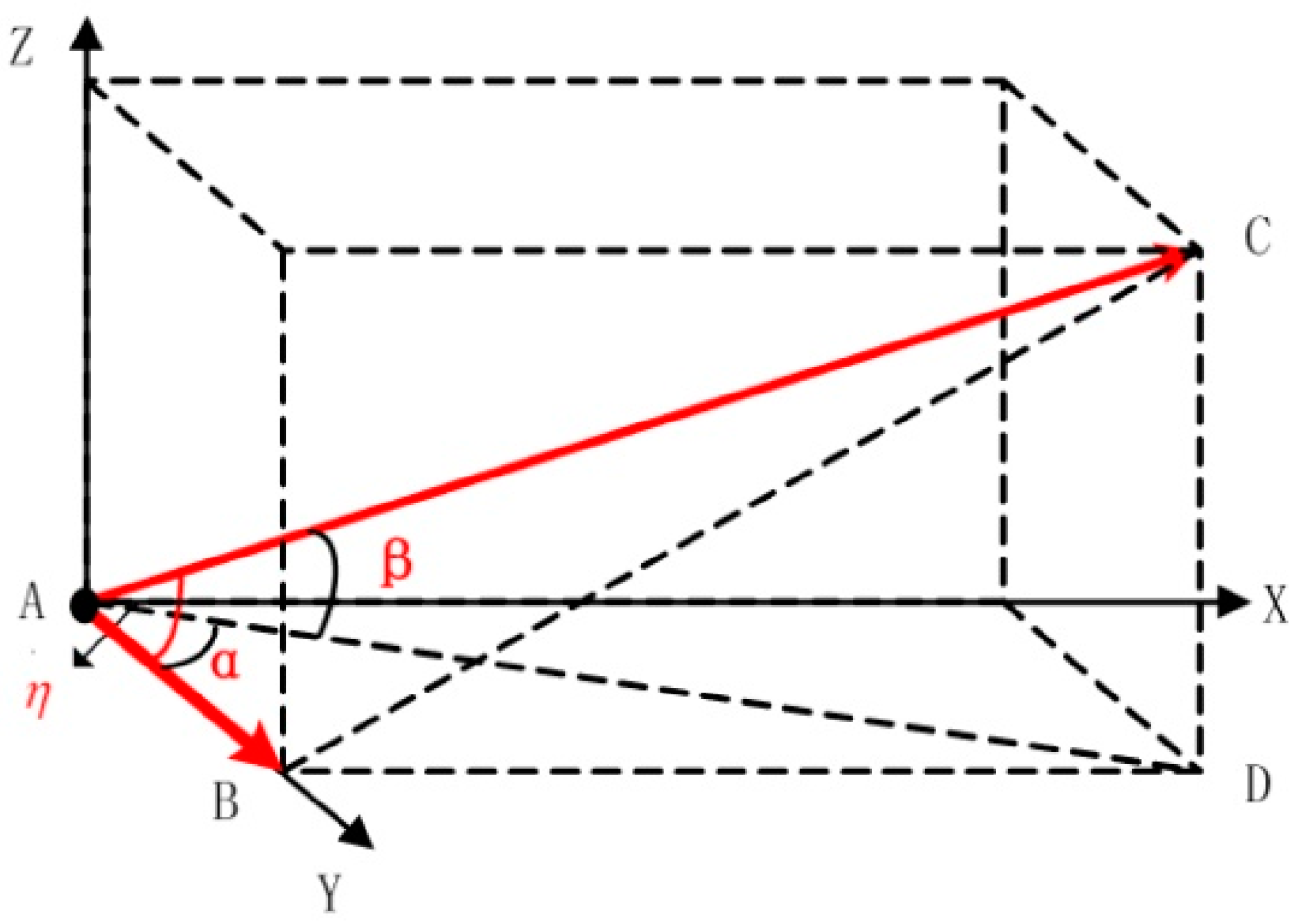
3.1. Basic Model of Space
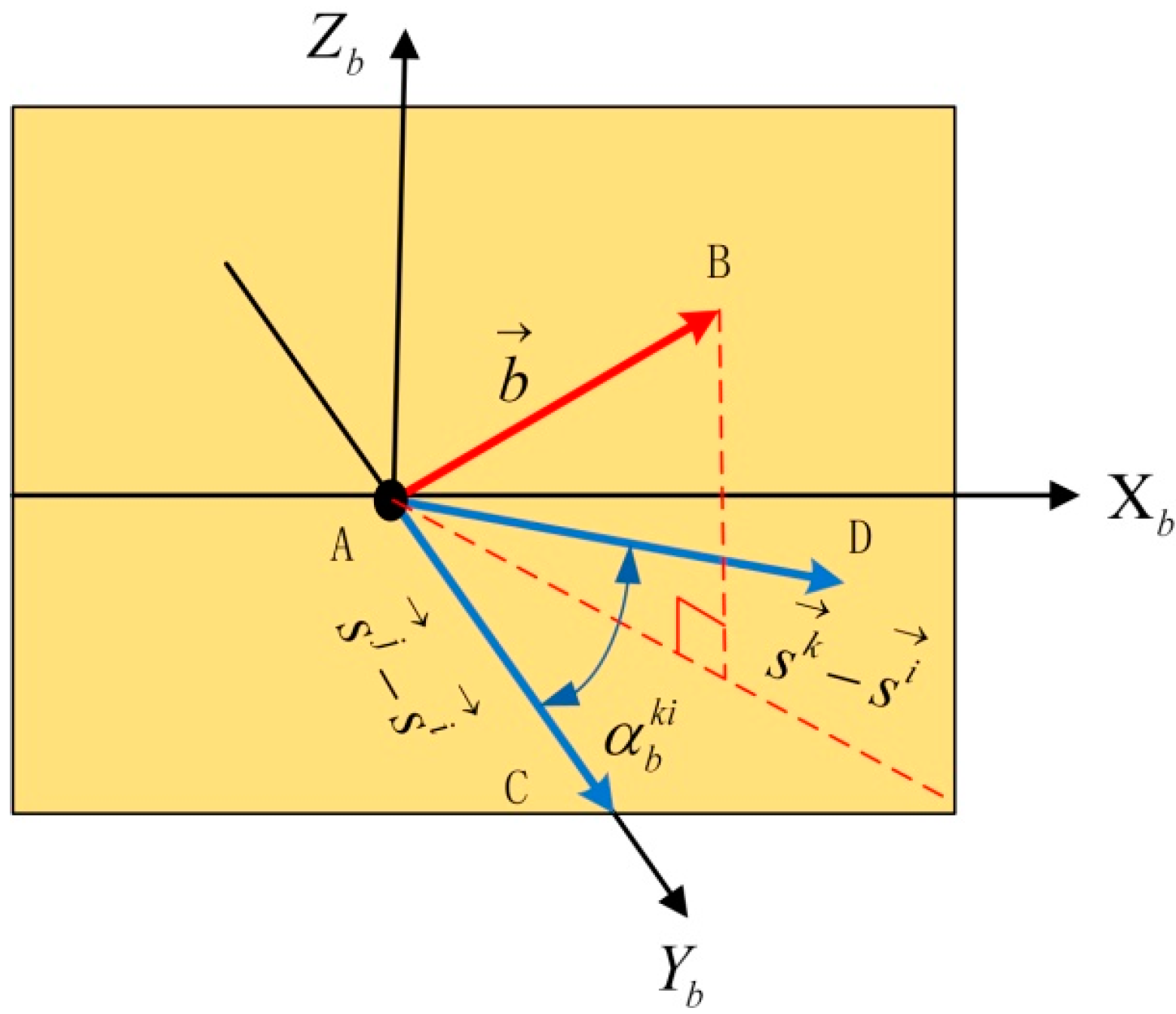
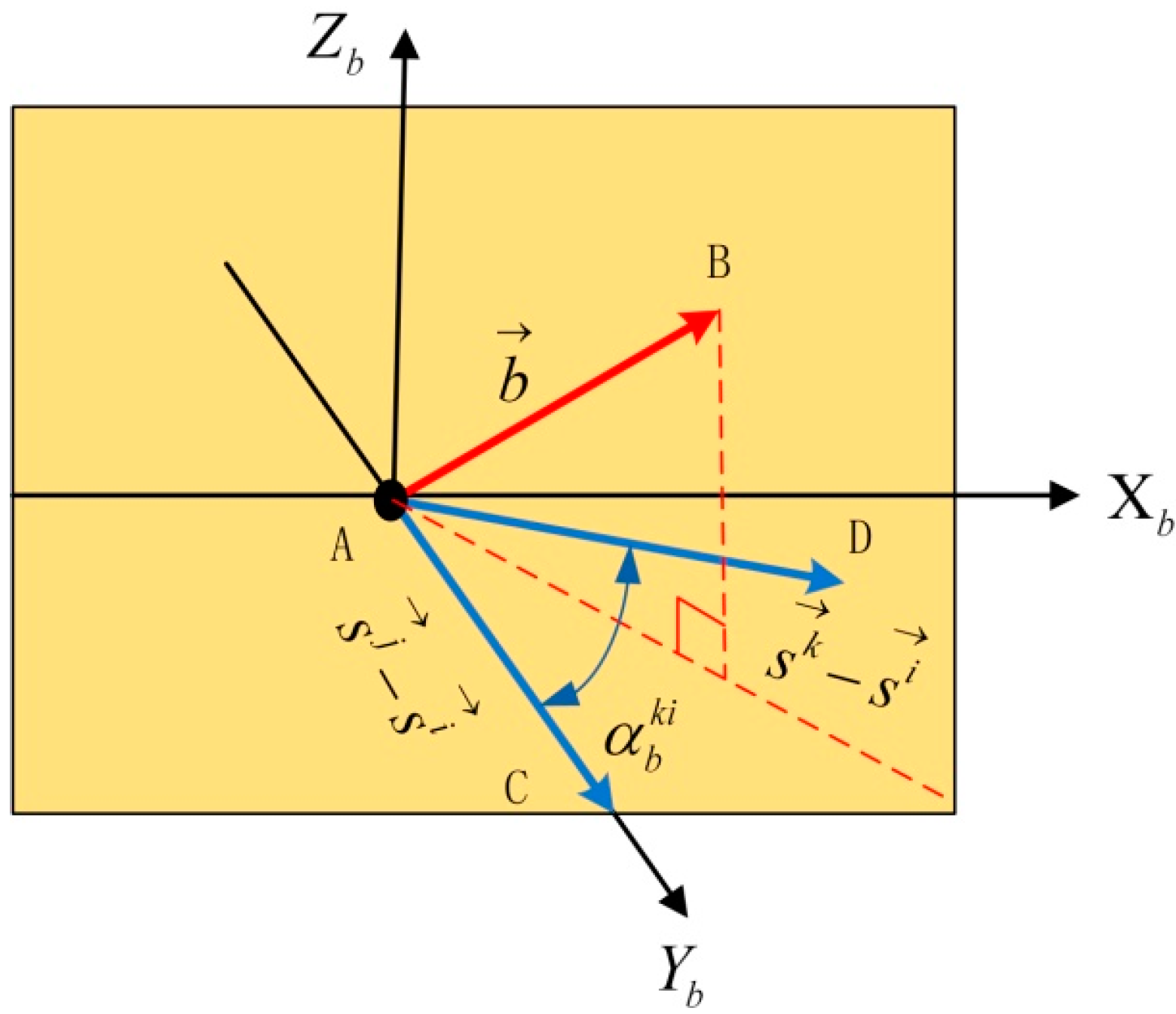
3.2. Generation of Rotation Matrix
3.3. Method of Satellite Selection in Resolving Equations
3.4. Integer Ambiguities Determination Method Based on Constraint Conditions
4. The Relationship of the Geometric Model and the Noise Error
4.1. The Influence of the Noise Error on the DD Equations
4.2. Ambiguity Decorrelation Adjustment of the Geometric Relationship
4.3. Comparison of the Simulation Results
5. Experimental Attitude Determination Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, W.; Qin, H. New method for single epoch, single frequency land vehicle attitude determination using low-end GPS receiver. GPS Solut. 2012, 16, 329–338. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The LAMBDA method for the GPS compass. Artif. Satell. 2006, 41, 89–103. [Google Scholar] [CrossRef]
- Bo, W.; Zhihong, D.; Shunting, W.; Mengyin, F. A motion-based integer ambiguity resolution method for attitude determination using the global positioning system (GPS). Meas. Sci. Technol. 2010, 21, 065102. [Google Scholar]
- Chen, W.; Qin, H.L.; Zhang, Y.Z.; Jin, T. Accuracy assessment of single and double difference models for the single epoch GPS compass. Adv. Space Res. 2012, 49, 725–738. [Google Scholar] [CrossRef]
- Wang, Y.; Zhan, X.; Zhang, Y. Improved ambiguity function method based on analytical resolution for GPS attitude determination. Meas. Sci. Technol. 2007, 18, 2985–2990. [Google Scholar] [CrossRef]
- Wen-rui, J.; Chuan-run, Z. Hybrid analytical resolution approach based on ambiguity function for attitude determination. J. Zhejiang Univ. Sci. A 2009, 10, 1038–1048. [Google Scholar]
- Li, Y.; Efatmaneshnik, M.; Dempster, A.G. Attitude determination by integration of MEMS inertial sensors and GPS for autonomous agriculture applications. GPS Solut. 2012, 16, 41–52. [Google Scholar] [CrossRef]
- Cong, L.; Li, E.; Qin, H.; Ling, K.V.; Xue, R. A performance improvement method for low-cost land vehicle GPS/MEMS-INS attitude determination. Sensors 2015, 15, 5722–5746. [Google Scholar] [CrossRef] [PubMed]
- Couselman, C.C.; Gourevitch, S.A. Miniature interferometer terminals for earth surveying: Ambiguity and multi-path with the global positioning system. IEEE Trans. Geosci. Remote Sens. 1981, GE-19, 244–252. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Verhagen, S.; Teunissen, P.J.G. New global navigation satellite system ambiguity resolution method compared to existing approaches. J. Guid. Control Dyn. 2006, 29, 981–991. [Google Scholar] [CrossRef]
- Wang, B.; Miao, L.; Wang, S.; Shen, J. A constrained LAMBDA method for GPS attitude determination. GPS Solut. 2009, 13, 97–107. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Giorgi, G.; Buist, P.J. Testing of a new single frequency GPS carrier phase attitude determination method: Land, ship and aircraft experiments. GPS Solut. 2010, 15, 15–28. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Integer least-squares theory for the GNSS compass. J. Geod. 2010, 84, 433–447. [Google Scholar] [CrossRef]
- Chang, X.W.; Yang, X.; Zhou, T. MLAMBDA: A modified LAMBDA method for integer least squares estimation. J. Geod. 2005, 79, 552–565. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| |b| = 200 cm | Carrier Phase Precision: 3.0 mm | Pseudorange Precision: 15 cm | ||
|---|---|---|---|---|
| #Sats | Method | Success Rate (%) | Method | Success Rate (%) |
| 5 | Y | 72.1 | N | 43.1 |
| 6 | Y | 92.4 | N | 67.3 |
| 7 | Y | 95.1 | N | 77.4 |
| 8 | Y | 97.3 | N | 82.1 |
| Test | Epochs | Baseline (m) | Attitude (°) | Std. Errors |
|---|---|---|---|---|
| 1 | 800 | 2.00 | Yaw | 0.1483 |
| Pitch | 0.1852 | |||
| 2 | 500 | 2.00 | Yaw | 0.1503 |
| Pitch | 0.1801 | |||
| 3 | 800 | 0.5 | Yaw | 0.2121 |
| Pitch | 0.2509 | |||
| 4 | 500 | 0.5 | Yaw | 0.2221 |
| Pitch | 0.2615 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Mao, X.; Tian, W. Rotation Matrix Method Based on Ambiguity Function for GNSS Attitude Determination. Sensors 2016, 16, 841. https://doi.org/10.3390/s16060841
Yang Y, Mao X, Tian W. Rotation Matrix Method Based on Ambiguity Function for GNSS Attitude Determination. Sensors. 2016; 16(6):841. https://doi.org/10.3390/s16060841
Chicago/Turabian StyleYang, Yingdong, Xuchu Mao, and Weifeng Tian. 2016. "Rotation Matrix Method Based on Ambiguity Function for GNSS Attitude Determination" Sensors 16, no. 6: 841. https://doi.org/10.3390/s16060841
APA StyleYang, Y., Mao, X., & Tian, W. (2016). Rotation Matrix Method Based on Ambiguity Function for GNSS Attitude Determination. Sensors, 16(6), 841. https://doi.org/10.3390/s16060841