
A Highly Reliable and Cost-Efficient Multi-Sensor System for Land Vehicle Positioning

Abstract
:1. Introduction
- (1)
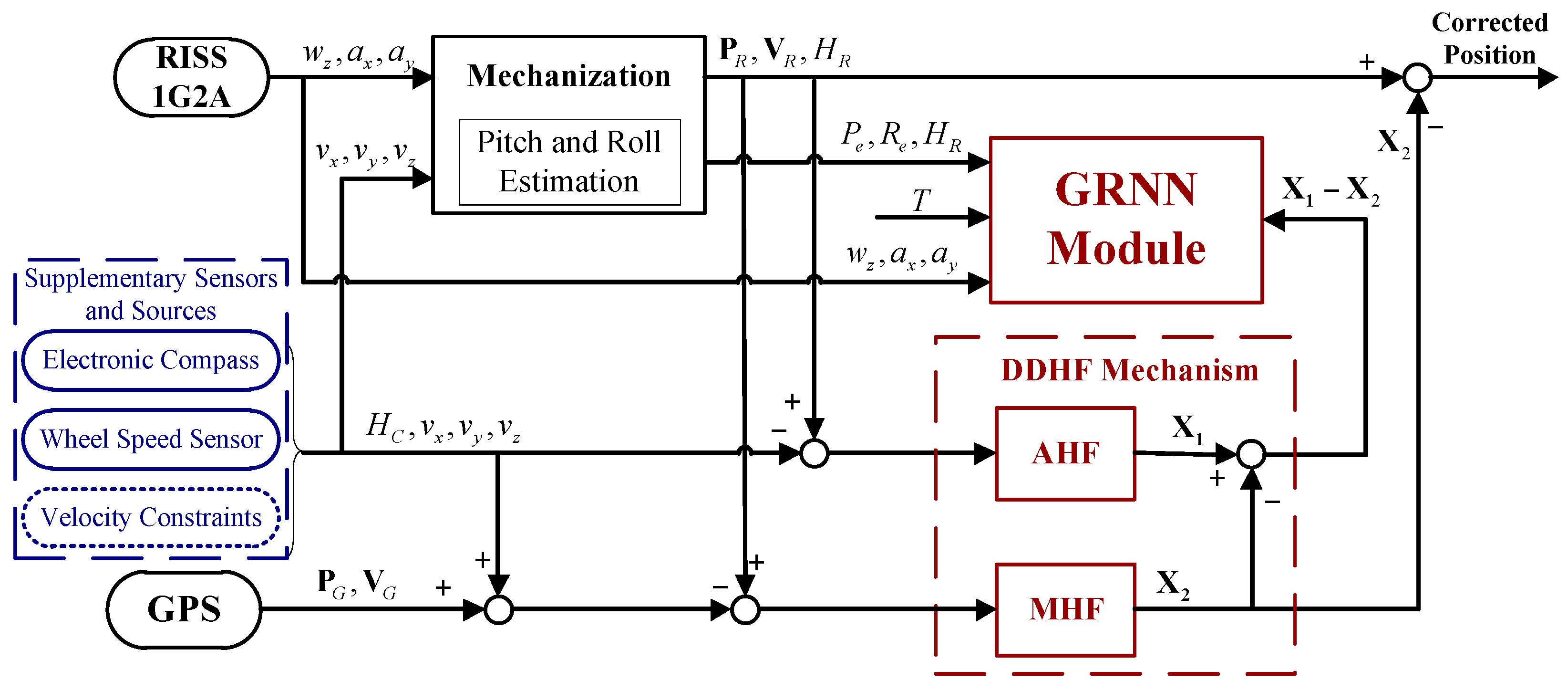
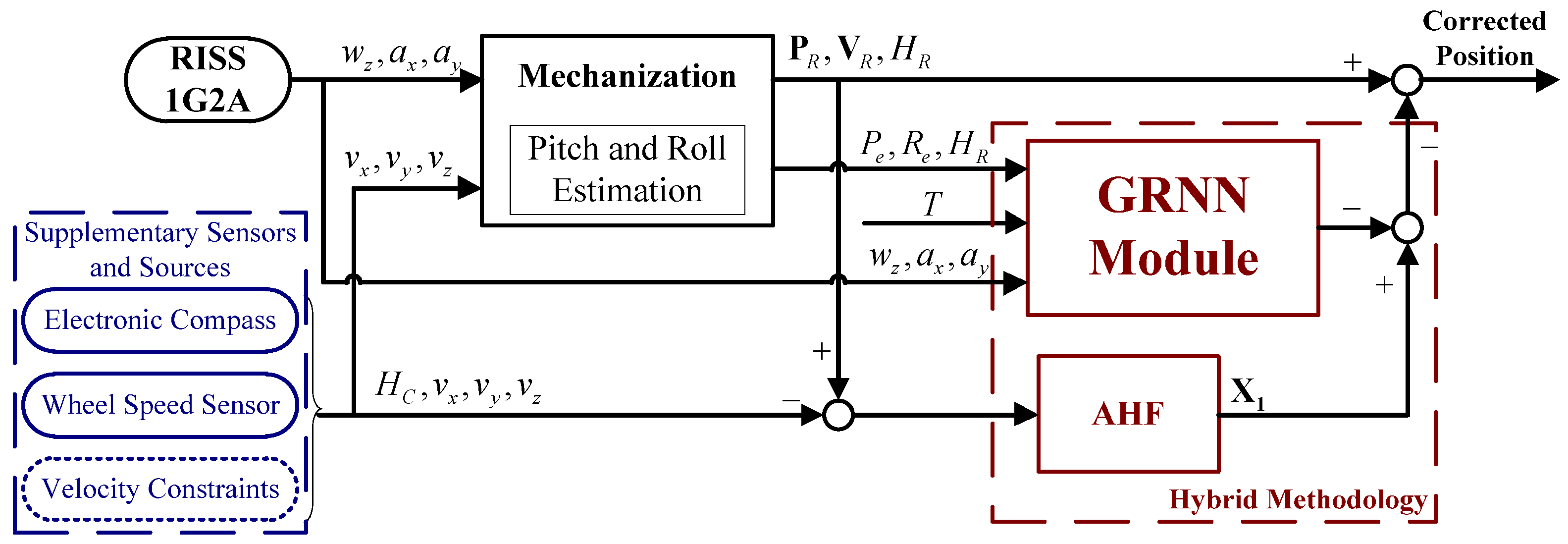
- The uncertain nonlinear drift of MEMS inertial sensors is thoroughly considered in the application of MEMS-RISS. On one hand, an H∞ filter is employed to mitigate the effect of uncertain nonlinear drift in pitch and roll angle estimation. On the other hand, a DDHF mechanism is utilized for multi-sensor fusion. Due to the high robustness of the H∞ filter, the proposed methodology is essentially immune to the uncertain nonlinear drift of RISS.
- (2)
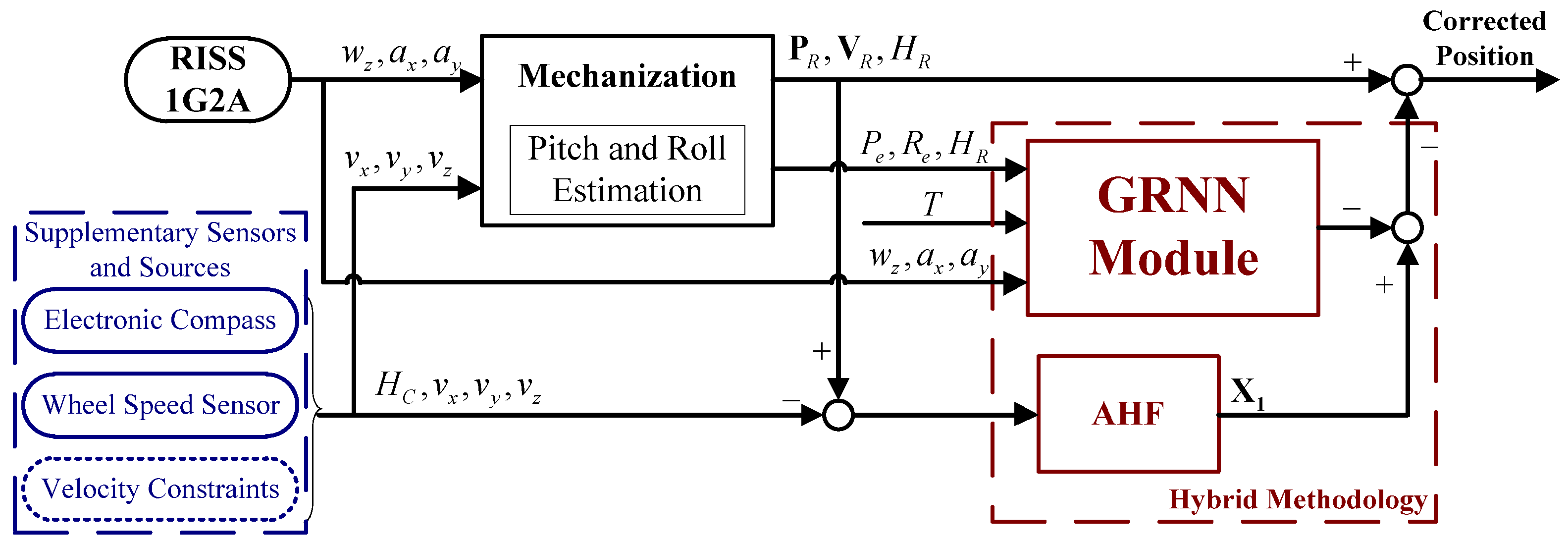
- The hybrid methodology of error compensation has the advantages of both actual measurements and model predictions. Therefore, the proposed vehicle positioning solution can achieve highly reliable performance in the presence of GPS outages.
2. Overview of Proposed Solution
3. Pitch and Roll Angle Estimation
- (1)
- Estimate the linear combination of state vectorwhere Ye(k) is the estimated vector and Le(k) is a user-defined matrix. Since we want to directly estimate Xe(k), we set Le(k) = I. I is the identity matrix.
- (2)
- Time propagation
- (3)
- Measurement update
4. DDHF Mechanism
4.1. State Equation and Measurement Model
4.2. Implementation of DDHF
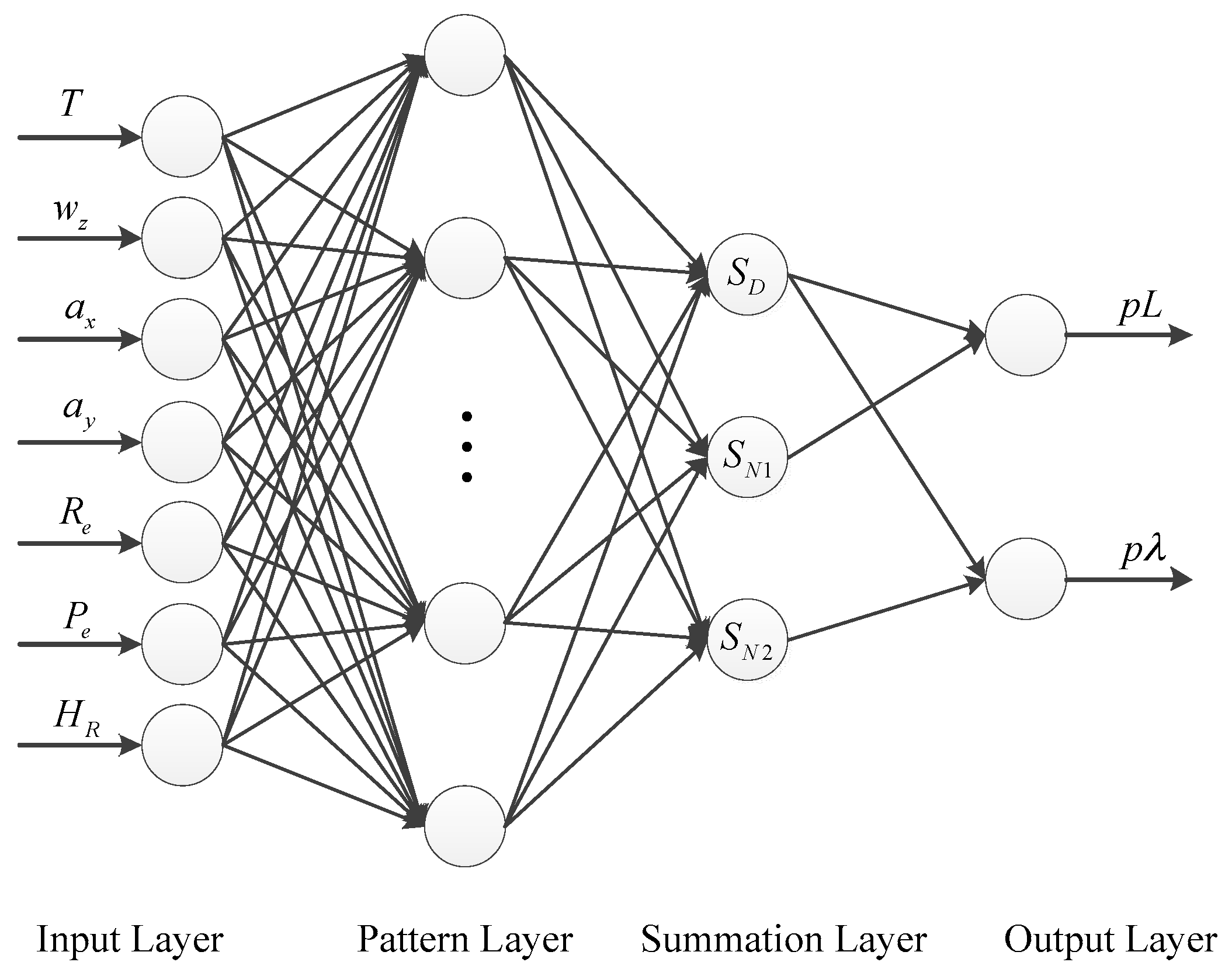
5. GRNN Module
- (1)
- Input Layer
- (2)
- Pattern Layer
- (3)
- Summation Layer
- (4)
- Output Layer
6. Experimental Validation
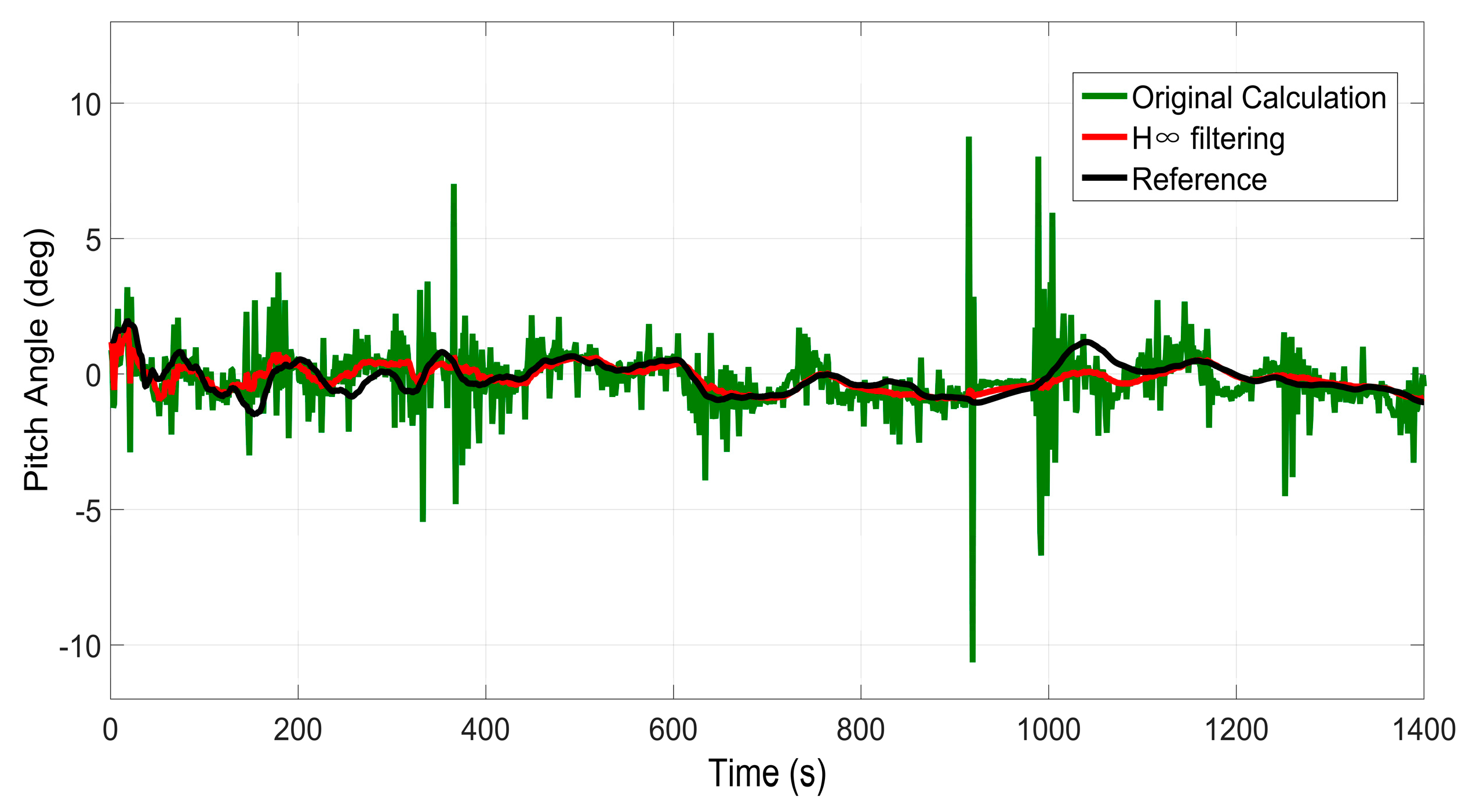
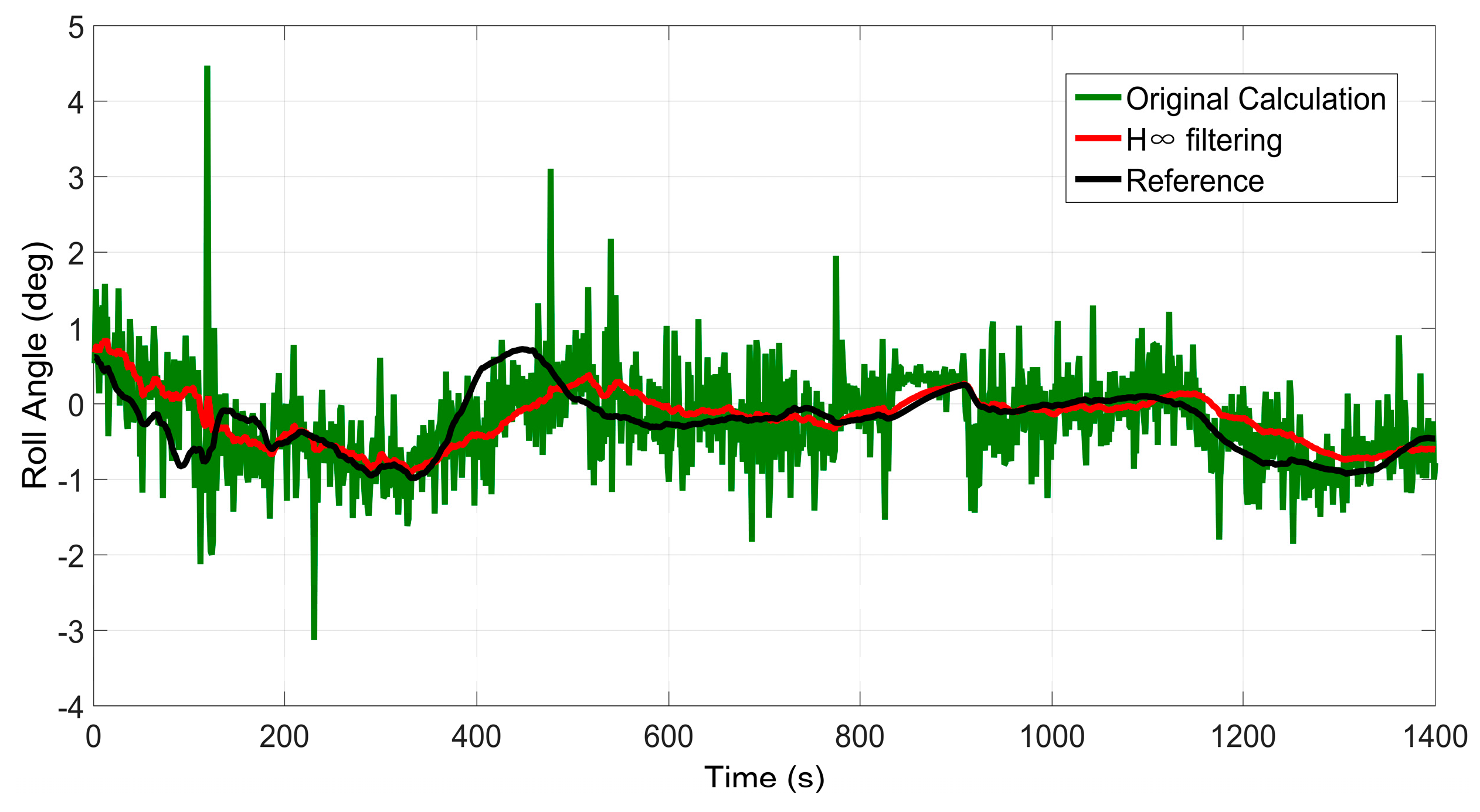
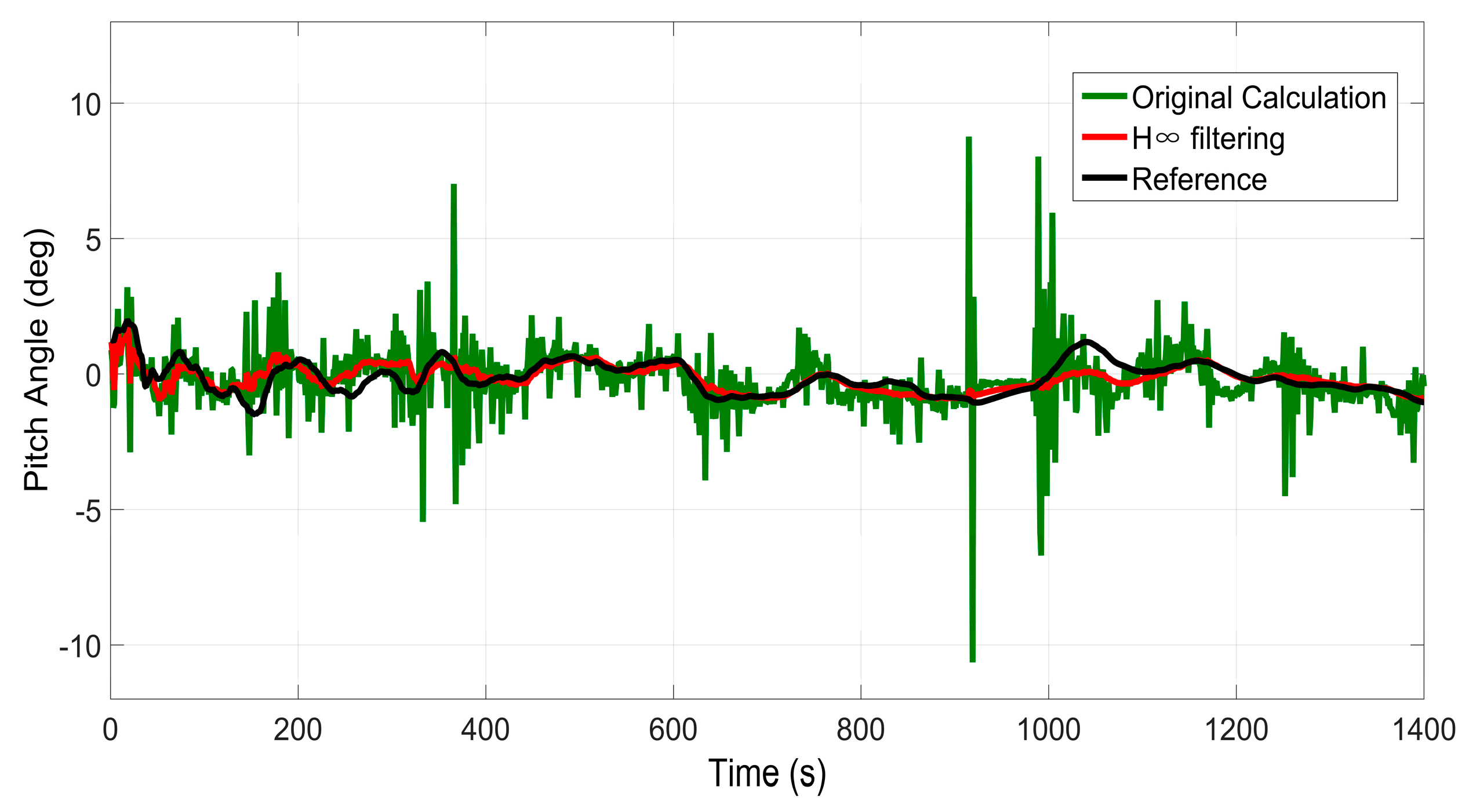
6.1. Test 1: Performance of the H∞ Filter for Pitch and Roll Angle Estimation
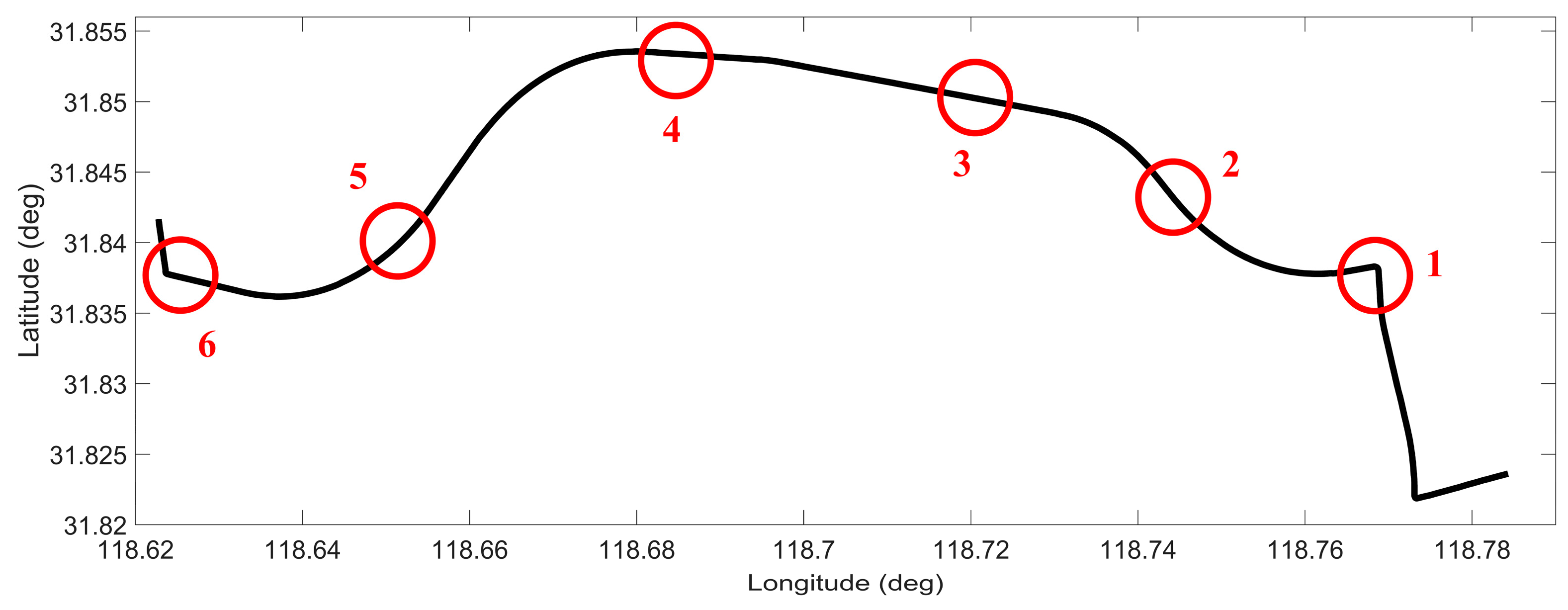
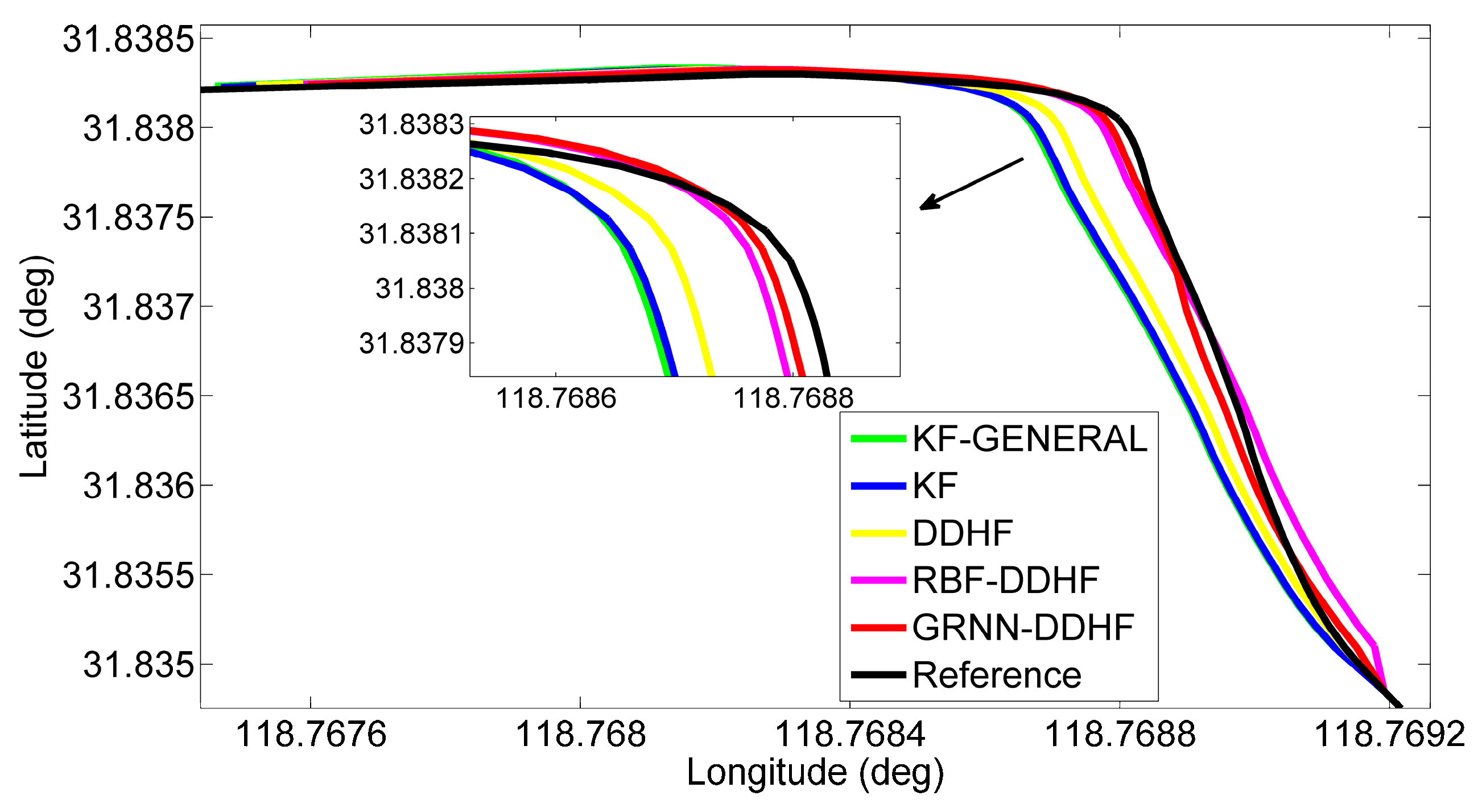
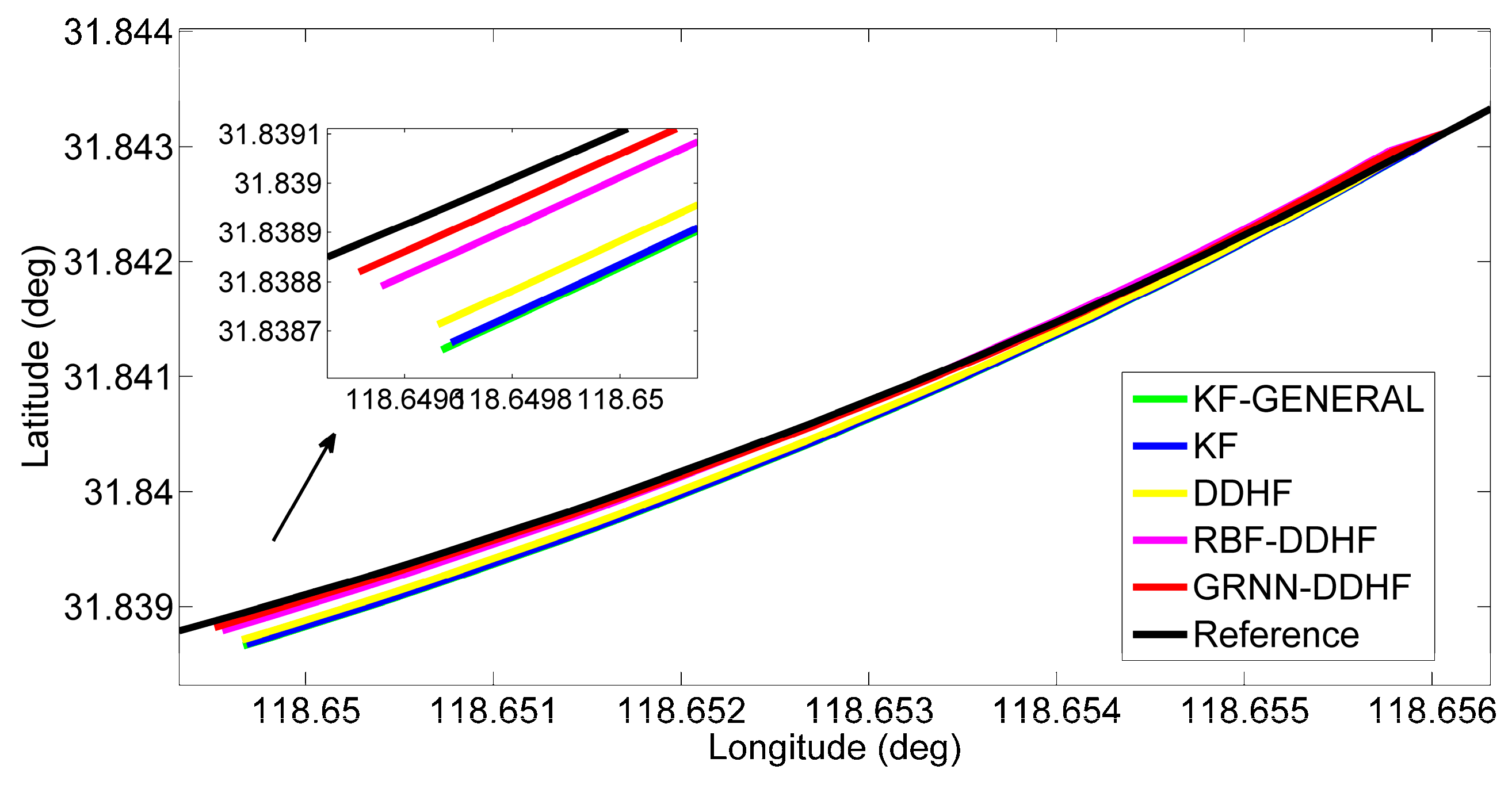
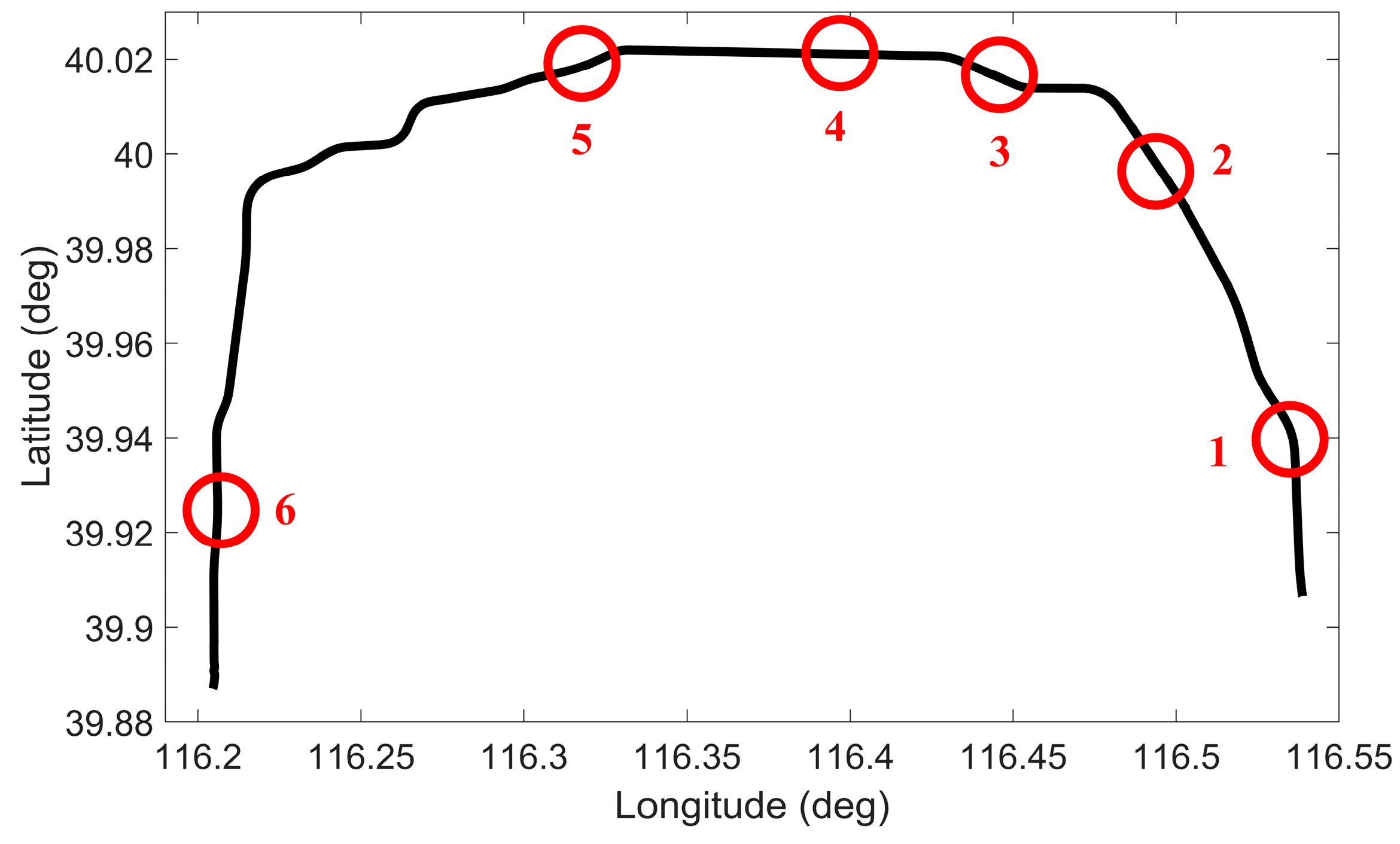
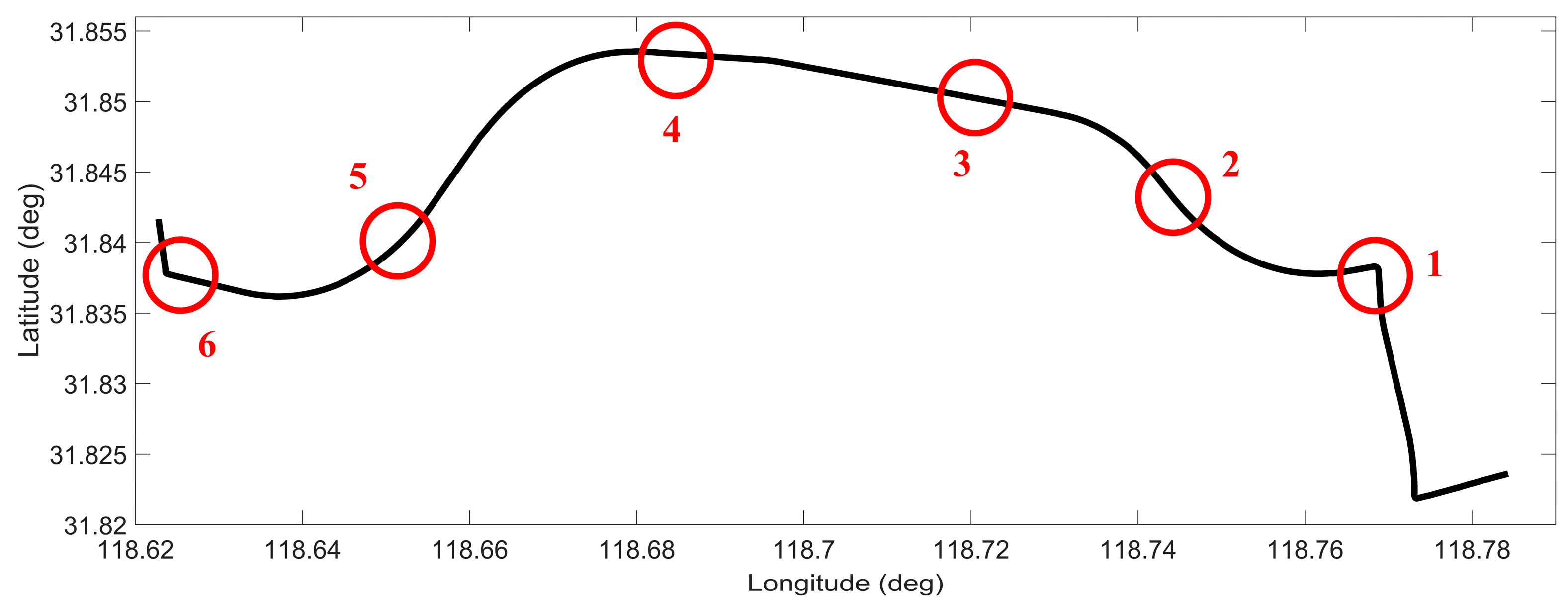
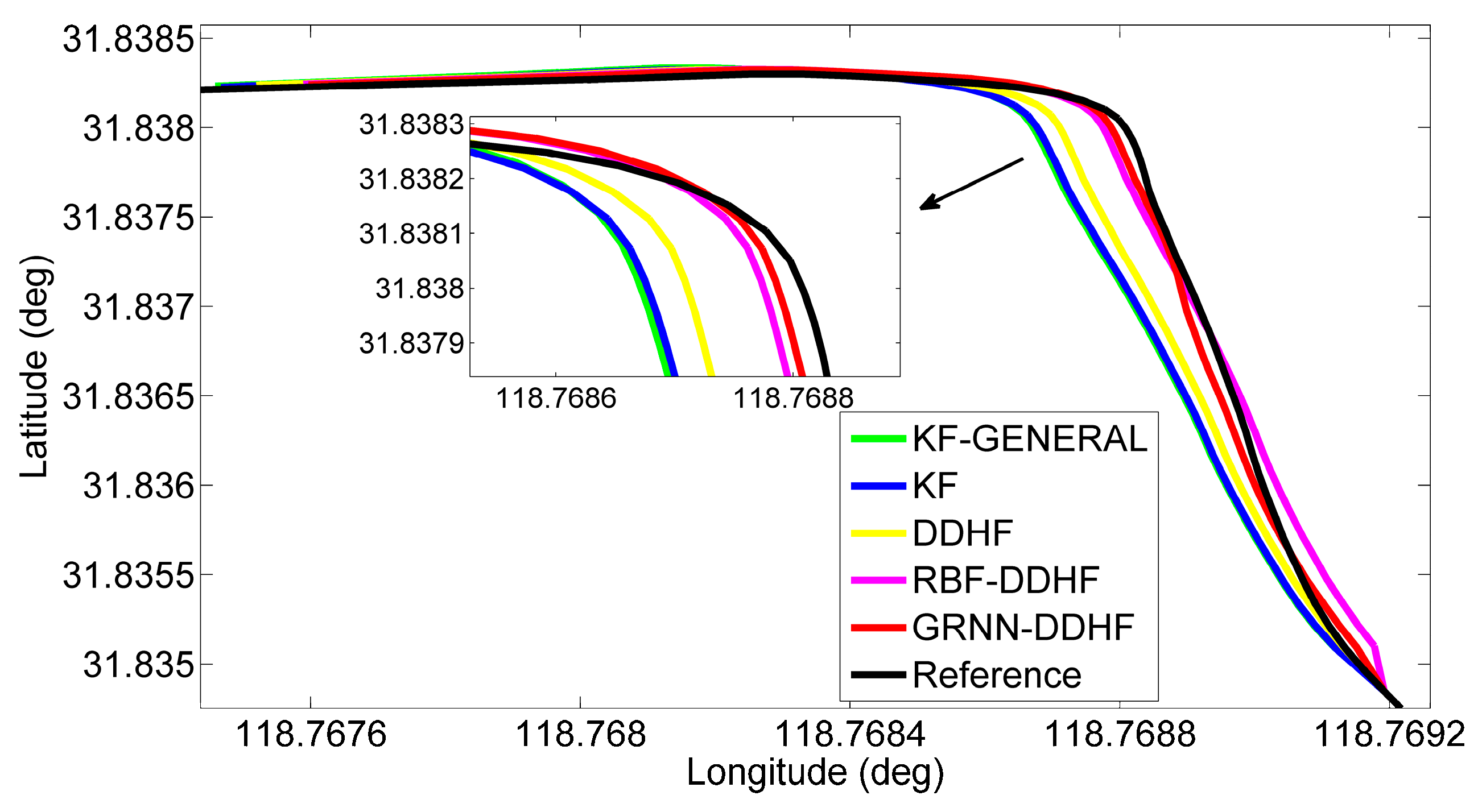
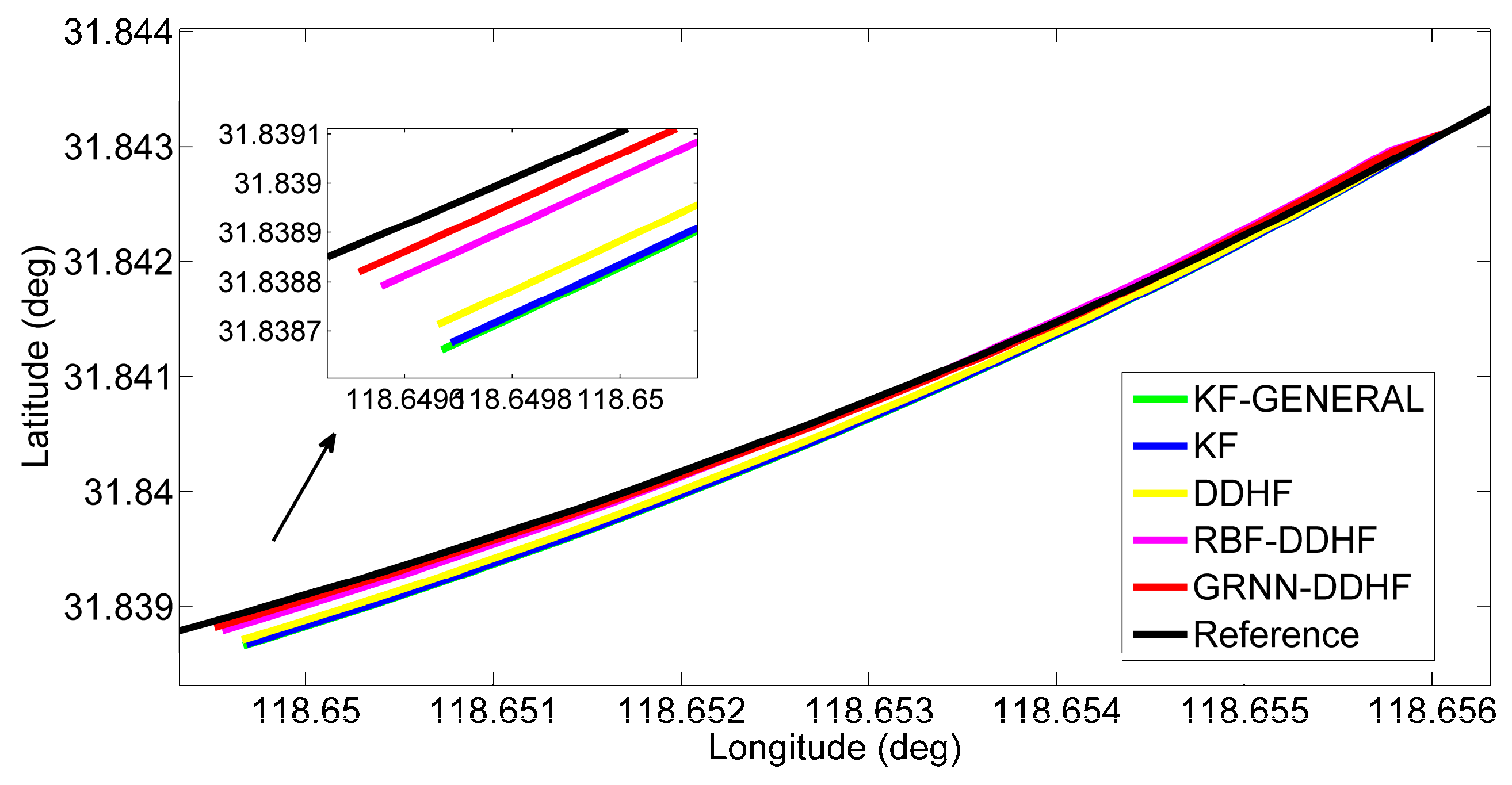
6.2. Test 2: Performance Evaluation of the Proposed Positioning Solution in Trajectory 1
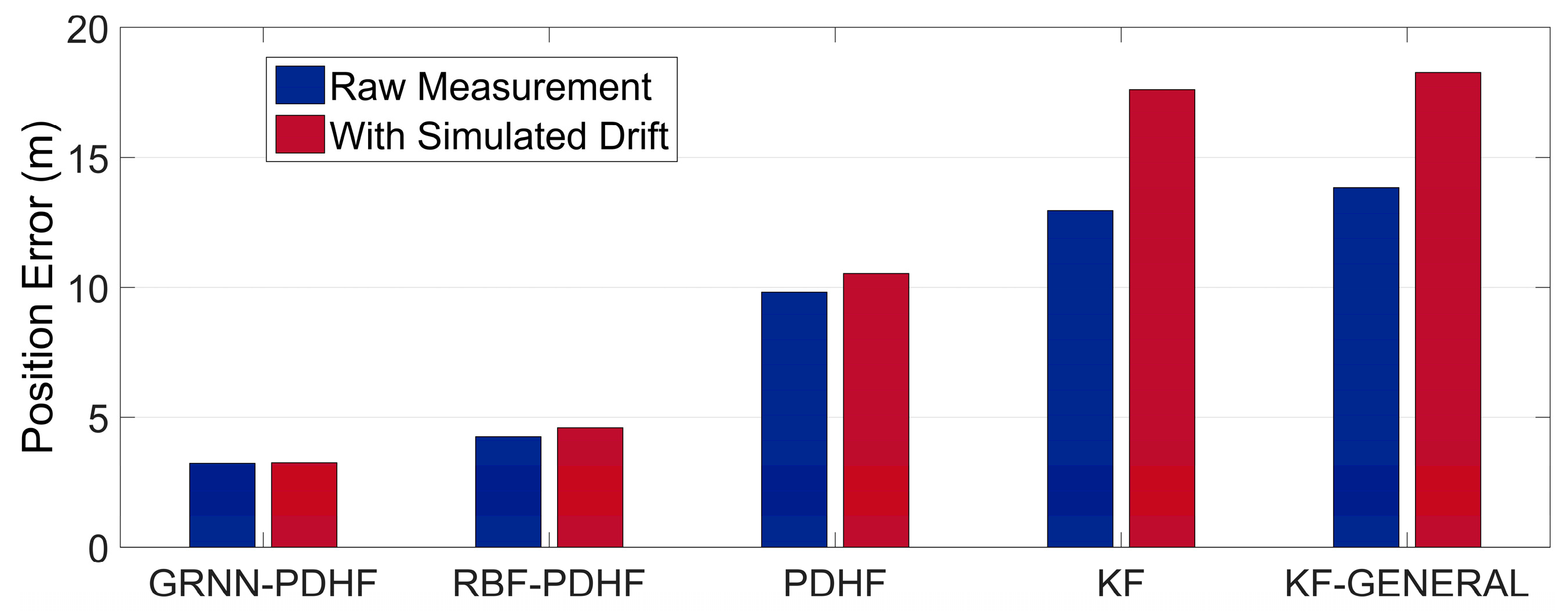
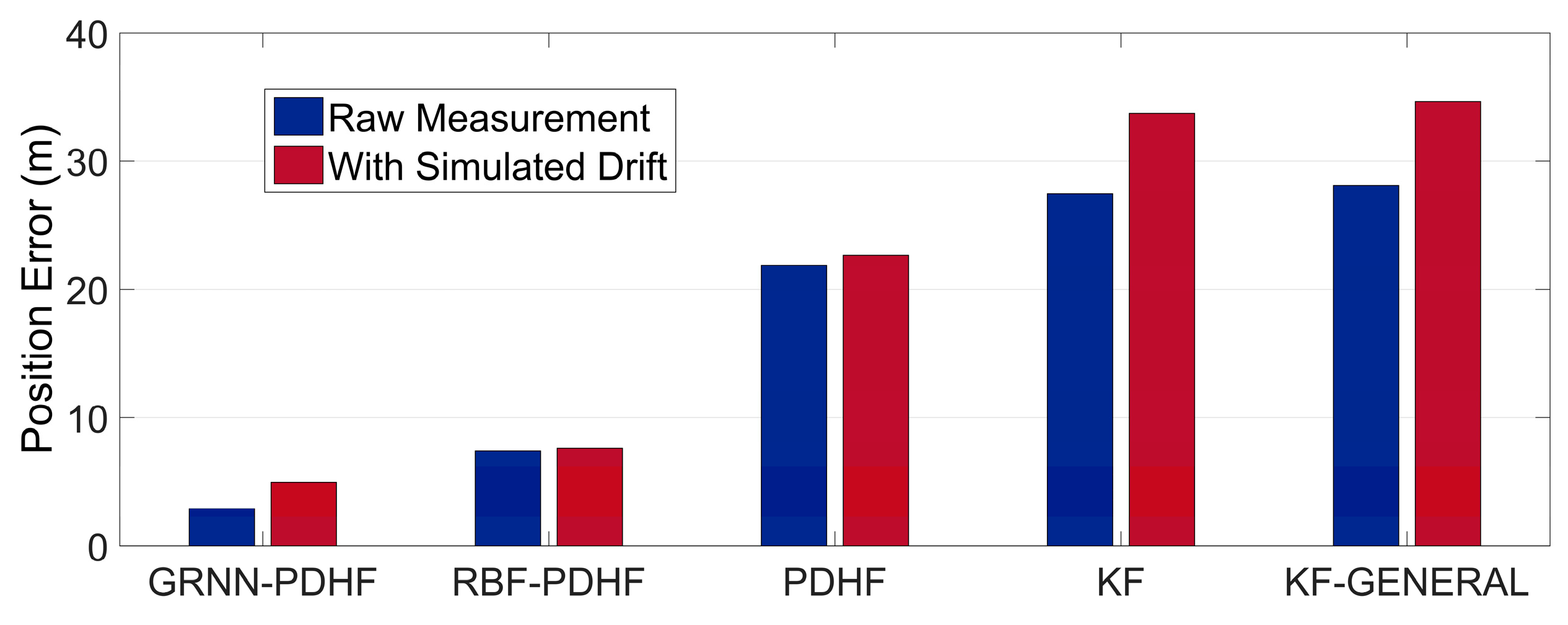
6.3. Test 3: Further Evaluation of the Reliability of the Proposed Positioning Solution
6.4. Test 4: Performance Evaluation of the Proposed Positioning Solution in Trajectory 2
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DDHF | distributed-dual-H∞ filtering |
| MHF | main H∞ filter |
| AHF | auxiliary H∞ filter |
| GRNN | generalized regression neural network |
| GPS | Global Positioning System |
| INS | Inertial Navigation System |
| KF | Kalman filter |
| MEMS | micro-electro-mechanical system |
| IMU | inertial measurement unit |
| RISS | reduced inertial sensor system |
| ANN | artificial neural network |
| RBF | Radial Basis Function |
| ANFIS | Adaptive Neuron-Fuzzy Inference System |
| 1G2A | one gyroscope and two accelerometers |
| CAN | Controller Area Network |
Appendix
References
- Gross, J.N.; Yu, G.; Rhudy, M.B. Robust UAV relative navigation with DGPS, INS, and peer-to-peer radio ranging. IEEE Trans. Autom. Sci. Eng. 2015, 12, 935–944. [Google Scholar] [CrossRef]
- Noureldin, A.; El-Shafie, A.; Bayoumi, M. GPS/INS integration utilizing dynamic neural networks for vehicular navigation. Inf. Fusion 2011, 12, 48–57. [Google Scholar] [CrossRef]
- Chiang, K.W.; Noureldin, A.; El-Sheimy, N. Constructive neural-networks-based MEMS/GPS integration scheme. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 582–594. [Google Scholar] [CrossRef]
- Betaille, D.; Peyret, F.; Ortiz, M.; Miquel, S.; Fontenary, L. A new modeling based on urban trenches to improve GNSS positioning quality of service in cities. IEEE Trans. Intell. Transp. Syst. 2013, 5, 59–70. [Google Scholar] [CrossRef]
- Georgy, J.; Noureldin, A.; Korenberg, M.J.; Bayoumi, M.M. Low-cost three-dimensional navigation solution for RISS/GPS integration using mixture particle filter. IEEE Trans. Veh. Technol. 2010, 59, 599–615. [Google Scholar] [CrossRef]
- Wang, J.H.; Gao, Y. Land vehicle dynamics-aided inertial navigation. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1638–1653. [Google Scholar] [CrossRef]
- Noureldin, A.; Karamat, T.B.; Eberts, M.D.; El-Shafie, A. Performance enhancement of MEMS-based INS/GPS integration for low-cost navigation applications. IEEE Trans. Veh. Technol. 2009, 58, 1077–1096. [Google Scholar] [CrossRef]
- Abdel-Hamid, W.; Noureldin, A.; El-Sheimy, N. Adaptive fuzzy prediction of low-cost inertial-based positioning errors. IEEE Trans. Fuzzy Syst. 2007, 15, 519–529. [Google Scholar] [CrossRef]
- Akca, T.; Demİrekler, M. An adaptive unscented Kalman filter for tightly coupled INS/GPS integration. In Proceedings of the 2012 IEEE/ION Position Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 389–395.
- Huang, J.; Tan, H.S. A low-order DGPS-based vehicle positioning system under urban environment. IEEE/ASME Trans. Mechatron. 2006, 11, 567–575. [Google Scholar] [CrossRef]
- Tzoreff, E.; Bobrovsky, B.Z. A novel approach for modeling land vehicle kinematics to improve GPS performance under urban environment conditions. IEEE Trans. Intell. Transp. Syst. 2012, 13, 344–353. [Google Scholar] [CrossRef]
- Hong, S.; Lee, C.; Borrelli, F.; Hedrick, J.K. A novel approach for vehicle inertial parameter identification using a dual Kalman filter. IEEE Trans. Intell. Transp. Syst. 2015, 16, 151–161. [Google Scholar] [CrossRef]
- Islam, A.; Iqbal, U.; Langlois, J.M.; Noureldin, A. Implementation methodology of embedded land vehicle positioning using an integrated GPS and multi sensor system. Integr. Comput. Aided Eng. 2010, 17, 69–83. [Google Scholar]
- Georgy, J.; Noureldin, A.; Korenberg, M.J.; Bayoumi, M.M. Modeling the stochastic drift of a MEMS-based gyroscope in gyro/odometer/GPS integrated navigation. IEEE Trans. Intell. Transp. Syst. 2010, 11, 856–872. [Google Scholar] [CrossRef]
- Iqbal, U.; Karamat, T.B.; Okou, A.F.; Noureldin, A. Experimental results on an integrated GPS and multisensor system for land vehicle positioning. Int. J. Navig. Obs. 2009, 2009, 1–18. [Google Scholar] [CrossRef]
- Shen, Z.; Georgy, J.; Korenberg, M.J.; Noureldin, A. Low cost two dimension navigation using an augmented Kalman filter/Fast Orthogonal Search module for the integration of reduced inertial sensor system and Global Positioning System. Transp. Res. C Emerg. Technol. 2011, 19, 1111–1132. [Google Scholar] [CrossRef]
- Han, S.; Wang, J. Land vehicle navigation with the integration of GPS and reduced INS: Performance improvement with velocity aiding. J. Navig. 2010, 63, 153–166. [Google Scholar] [CrossRef]
- Gu, Y.; Hsu, L.-T.; Kamijo, S. Passive sensor integration for vehicle self-localization in urban traffic environment. Sensors 2015, 15, 30199–30220. [Google Scholar] [CrossRef] [PubMed]
- Noureldin, A.; Osman, A.; El-Sheimy, N. A neuro-wavelet method for multi-sensor system integration for vehicular navigation. J. Meas. Sci. Technol. 2004, 15, 404–412. [Google Scholar] [CrossRef]
- Chang, T.H.; Wang, L.S.; Chang, F.R. A solution to the ill-conditioned GPS positioning problem in an urban environment. IEEE Trans. Intell. Transp. Syst. 2009, 10, 135–145. [Google Scholar] [CrossRef]
- Li, Q.; Chen, L.; Li, M.; Shih-Lung, S.; Nuchter, A. A sensor-fusion drivable-region and lane-detection system for autonomous vehicle navigation in challenging road scenarios. IEEE Trans. Veh. Technol. 2014, 63, 540–555. [Google Scholar] [CrossRef]
- Rose, C.; Britt, J.; Allen, J.; Bevly, D. An integrated vehicle navigation system utilizing lane-detection and lateral position estimation systems in difficult environments for GPS. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2615–2629. [Google Scholar] [CrossRef]
- Hur, H.; Ahn, H. Discrete-time H∞ filtering for mobile robot localization using wireless sensor network. IEEE Sens. J. 2013, 13, 245–252. [Google Scholar] [CrossRef]
- Yu, F.; Lv, C.; Dong, Q. A novel robust H∞ filter based on Krein space theory in the SINS/CNS attitude reference system. Sensors 2016, 16, 396. [Google Scholar] [CrossRef] [PubMed]
- Outamazirt, F.; Li, F.; Yan, L.; Nemra, A. Autonomous navigation system using a fuzzy adaptive nonlinear H∞ Filter. Sensors 2014, 14, 17600–17620. [Google Scholar] [CrossRef] [PubMed]
- You, F.Q.; Wang, F.L.; Guan, S.P. Game-theoretic design for robust H∞ filtering and deconvolution with consideration of known input. IEEE Trans. Autom. Sci. Eng. 2011, 8, 532–539. [Google Scholar] [CrossRef]
- Shi, J.; Miao, L.; Ni, M.; Shen, J. Optimal robust fault-detection filter for micro-electro-mechanical system-based inertial navigation system/global positioning system. IET Control Theory Appl. 2012, 6, 254–260. [Google Scholar] [CrossRef]
- Kim, K.H.; Lee, J.G.; Park, C.G. Adaptive two-stage extended Kalman filter for a fault-tolerant INS-GPS loosely coupled system. IEEE Trans. Aerosp. 2009, 45, 125–137. [Google Scholar]
- Cheng, J.; Qi, B.; Chen, D.; Landry, R., Jr. Modification of an RBF ANN-based temperature compensation model of interferometric fiber optical gyroscopes. Sensors 2015, 15, 11189–11207. [Google Scholar] [CrossRef] [PubMed]
- Lei, X.; Li, J. An adaptive navigation method for a small unmanned aerial rotorcraft under complex environment. Measurement 2013, 46, 4166–4171. [Google Scholar] [CrossRef]
- Saadeddin, K.; Abdel-Hafez, M.F.; Jaradat, M.A. Optimization of intelligent-based approach for low-cost INS/GPS navigation system. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems, Atlanta, GA, USA, 28–31 May 2013; pp. 668–677.
- Iqbal, U.; Okou, A.F.; Noureldin, A. An integrated reduced inertial sensor system—RISS/GPS for land vehicle. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 1014–1021.
- Tseng, H.E.; Xu, L.; Hrovat, D. Estimation of land vehicle roll and pitch angles. Veh. Syst. Dyn. 2007, 45, 433–443. [Google Scholar] [CrossRef]
- Li, X.; Chen, W.; Chan, C.Y. A reliable multisensor fusion strategy for land vehicle positioning using low-cost sensors. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2014, 228. [Google Scholar] [CrossRef]
- Godha, S.; Cannon, M.E. GPS/MEMS INS integrated system for navigation in urban areas. GPS Solut. 2007, 11, 193–203. [Google Scholar] [CrossRef]
- Farrell, J.; Barth, M. The Global Positioning System and Inertial Navigation; McGraw-Hill: New York, NY, USA, 1999; pp. 113–123. [Google Scholar]
- Farrell, J.A.; Givargis, T.D.; Barth, M.J. Real-time differential carrier phase GPS-aided INS. IEEE Trans. Control Syst. Technol. 2000, 8, 709–720. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.G. An adaptive fault-tolerant multisensor navigation strategy for automated vehicles. IEEE Trans. Veh. Technol. 2010, 59, 2815–2829. [Google Scholar]
- Chen, C.S.; Weng, C.M.; Lin, C.J.; Liu, H.W. The use of a novel auto-focus technology based on a GRNN for the measurement system for mesh membranes. Microsyst. Technol. 2015, 21, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Li, C.F.; Bovik, A.C.; Wu, X. Blind image quality assessment using a general regression neural network. IEEE Trans. Neural Netw. 2011, 22, 793–799. [Google Scholar] [PubMed]
- Efendioglu, H.S.; Yildirim, T.; Fidanboylu, K. Prediction of force measurements of a microbend sensor based on an artificial neural network. Sensors 2009, 9, 7167–7176. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Chiang, K. An intelligent and autonomous MEMS IMU/GPS integration scheme for low cost land navigation applications. GPS Solut. 2008, 12, 135–146. [Google Scholar] [CrossRef]
- Ladlani, I.; Houichi, L.; Djemili, L.; Heddam, S.; Belouz, K. Modeling daily reference evapotranspiration (ET0) in the north of Algeria using generalized regression neural networks (GRNN) and radial basis function neural networks (RBFNN): A comparative study. Meteorol. Atmos. Phys. 2012, 118, 163–178. [Google Scholar] [CrossRef]
- Rahman, M.S.; Park, Y.; Kim, K.D. RSS-based indoor localization algorithm for wireless sensor network using generalized regression neural network. Arab. J. Sci. Eng. 2012, 37, 1043–1053. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error Item | Original Calculation | H∞ Filtering | ||
|---|---|---|---|---|
| Mean | STD | Mean | STD | |
| Pitch Error (°) | 0.0507 | 1.0197 | 0.0246 | 0.3907 |
| Roll Error (°) | 0.0336 | 0.5601 | 0.0578 | 0.3085 |
| Outage Num. | Maximum Error (m) | ||||
|---|---|---|---|---|---|
| GRNN-DDHF | RBF-DDHF | DDHF | KF | KF-GENERAL | |
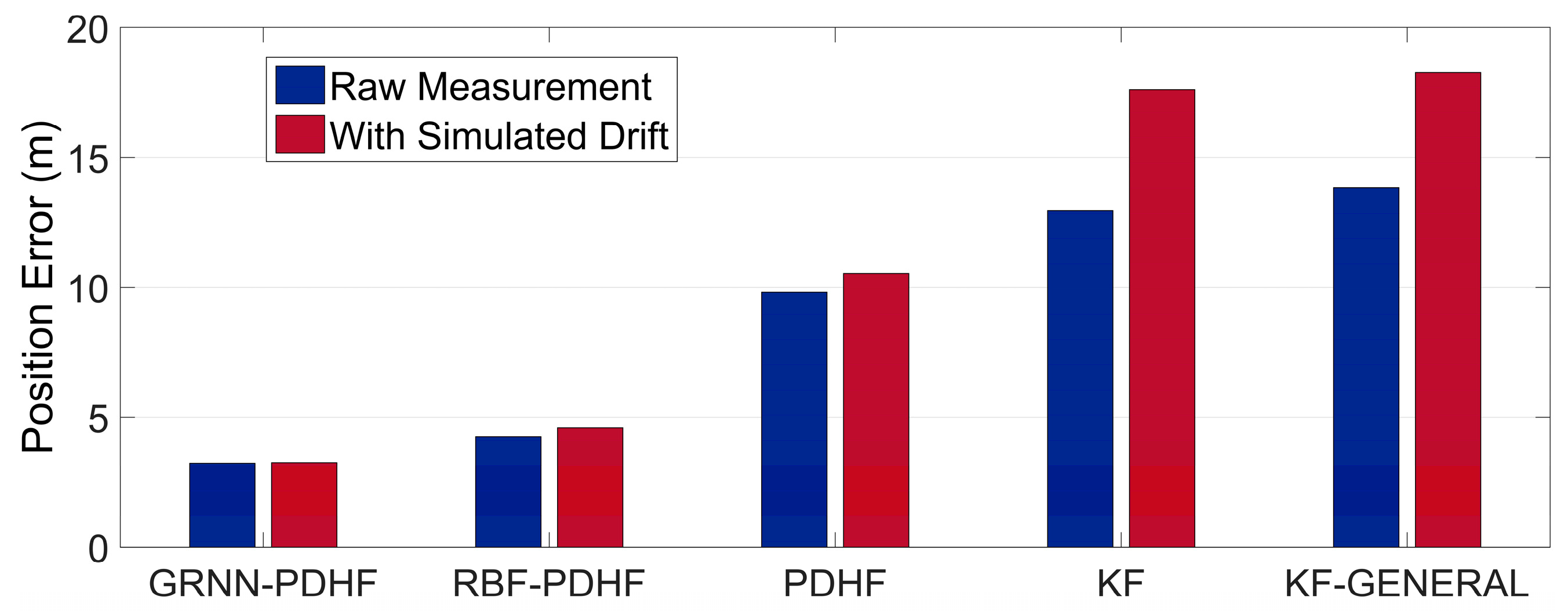
| 1 | 3.21 | 4.25 | 9.80 | 12.95 | 13.83 |
| 2 | 7.36 | 10.84 | 20.36 | 26.76 | 27.42 |
| 3 | 2.91 | 7.41 | 21.85 | 27.47 | 28.11 |
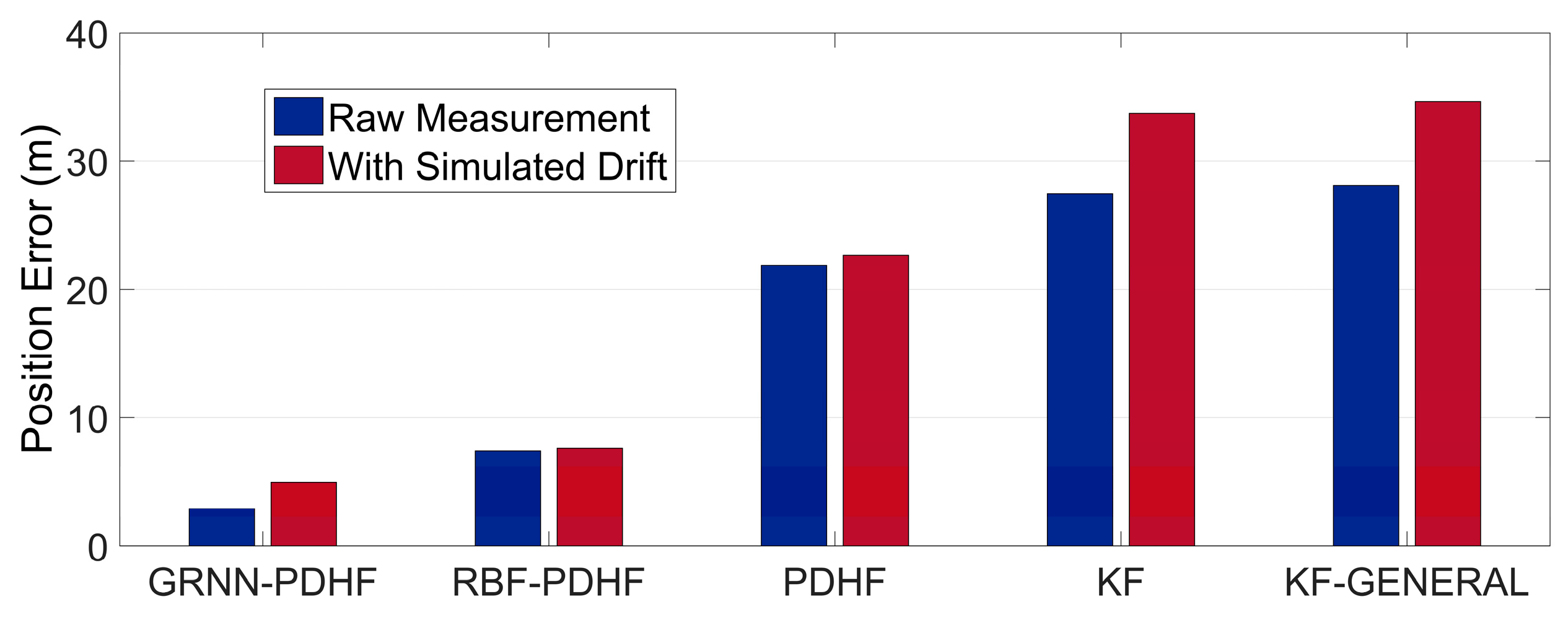
| 4 | 10.13 | 19.15 | 21.92 | 27.82 | 28.49 |
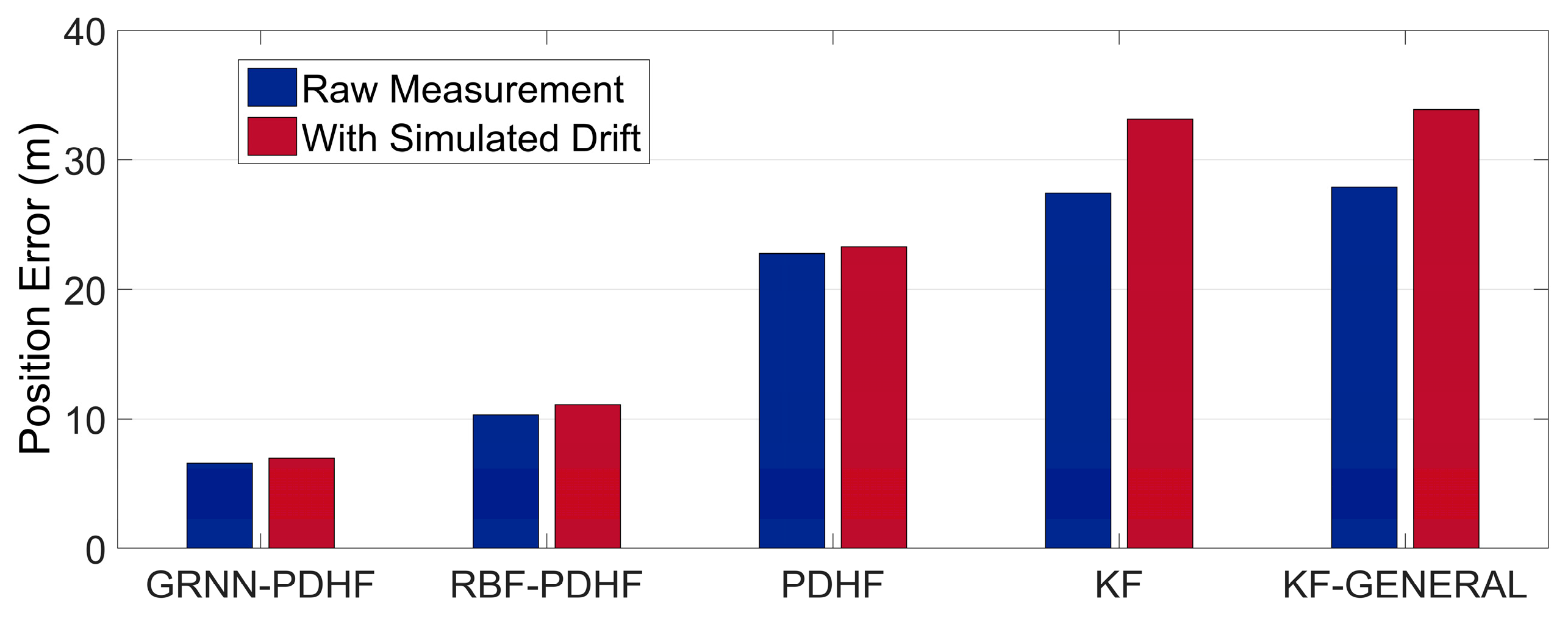
| 5 | 6.58 | 10.32 | 22.78 | 27.43 | 27.89 |
| 6 | 12.57 | 14.45 | 20.36 | 25.44 | 25.65 |
| Outage Num. | RMS Error (m) | ||||
|---|---|---|---|---|---|
| GRNN-DDHF | RBF-DDHF | DDHF | KF | KF-GENERAL | |
| 1 | 0.78 | 0.93 | 2.71 | 3.54 | 3.82 |
| 2 | 1.38 | 3.19 | 5.84 | 7.50 | 7.69 |
| 3 | 0.65 | 2.07 | 6.30 | 7.74 | 7.92 |
| 4 | 2.94 | 4.60 | 6.45 | 7.90 | 8.10 |
| 5 | 1.51 | 2.53 | 6.56 | 7.75 | 7.88 |
| 6 | 2.98 | 3.45 | 6.14 | 7.45 | 7.55 |
| Outage Num. | Maximum Error (m) | ||||
|---|---|---|---|---|---|
| GRNN-DDHF | RBF-DDHF | DDHF | KF | KF-GENERAL | |
| 1 | 3.24 | 4.60 | 10.54 | 17.61 | 18.26 |
| 2 | 10.64 | 11.49 | 20.41 | 33.34 | 34.10 |
| 3 | 4.95 | 7.62 | 22.64 | 33.71 | 34.61 |
| 4 | 10.69 | 19.54 | 22.84 | 34.04 | 34.98 |
| 5 | 6.97 | 11.09 | 23.29 | 33.13 | 33.88 |
| 6 | 13.14 | 14.72 | 20.53 | 29.81 | 30.70 |
| Outage Num. | RMS Error (m) | ||||
|---|---|---|---|---|---|
| GRNN-DDHF | RBF-DDHF | DDHF | KF | KF-GENERAL | |
| 1 | 0.72 | 1.10 | 2.01 | 5.23 | 5.49 |
| 2 | 2.10 | 3.14 | 5.43 | 9.50 | 9.71 |
| 3 | 0.64 | 2.22 | 5.80 | 9.61 | 9.86 |
| 4 | 2.58 | 4.53 | 6.05 | 9.76 | 10.02 |
| 5 | 1.54 | 2.95 | 6.64 | 9.44 | 9.63 |
| 6 | 2.94 | 3.57 | 5.77 | 8.91 | 9.29 |
| Outage Num. | Maximum Error (m) | ||||
|---|---|---|---|---|---|
| GRNN-DDHF | RBF-DDHF | DDHF | KF | KF-GENERAL | |
| 1 | 11.63 | 17.15 | 21.78 | 22.94 | 25.08 |
| 2 | 7.15 | 13.52 | 19.89 | 27.23 | 27.42 |
| 3 | 15.20 | 16.02 | 25.82 | 28.13 | 28.53 |
| 4 | 6.29 | 10.24 | 25.78 | 29.39 | 30.17 |
| 5 | 6.74 | 13.41 | 29.99 | 31.55 | 32.44 |
| 6 | 12.49 | 13.51 | 19.33 | 23.16 | 23.23 |
| Outage Num. | RMS Error (m) | ||||
|---|---|---|---|---|---|
| GRNN-DDHF | RBF-DDHF | DDHF | KF | KF-GENERAL | |
| 1 | 2.23 | 3.78 | 5.81 | 6.57 | 7.07 |
| 2 | 1.35 | 3.22 | 4.15 | 6.28 | 6.49 |
| 3 | 2.56 | 4.02 | 6.59 | 7.55 | 7.74 |
| 4 | 1.51 | 2.86 | 4.75 | 5.28 | 5.51 |
| 5 | 1.13 | 3.73 | 5.75 | 5.77 | 6.22 |
| 6 | 2.20 | 2.54 | 4.23 | 5.46 | 5.46 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Xu, Q.; Li, B.; Song, X. A Highly Reliable and Cost-Efficient Multi-Sensor System for Land Vehicle Positioning. Sensors 2016, 16, 755. https://doi.org/10.3390/s16060755
Li X, Xu Q, Li B, Song X. A Highly Reliable and Cost-Efficient Multi-Sensor System for Land Vehicle Positioning. Sensors. 2016; 16(6):755. https://doi.org/10.3390/s16060755
Chicago/Turabian StyleLi, Xu, Qimin Xu, Bin Li, and Xianghui Song. 2016. "A Highly Reliable and Cost-Efficient Multi-Sensor System for Land Vehicle Positioning" Sensors 16, no. 6: 755. https://doi.org/10.3390/s16060755