1. Introduction
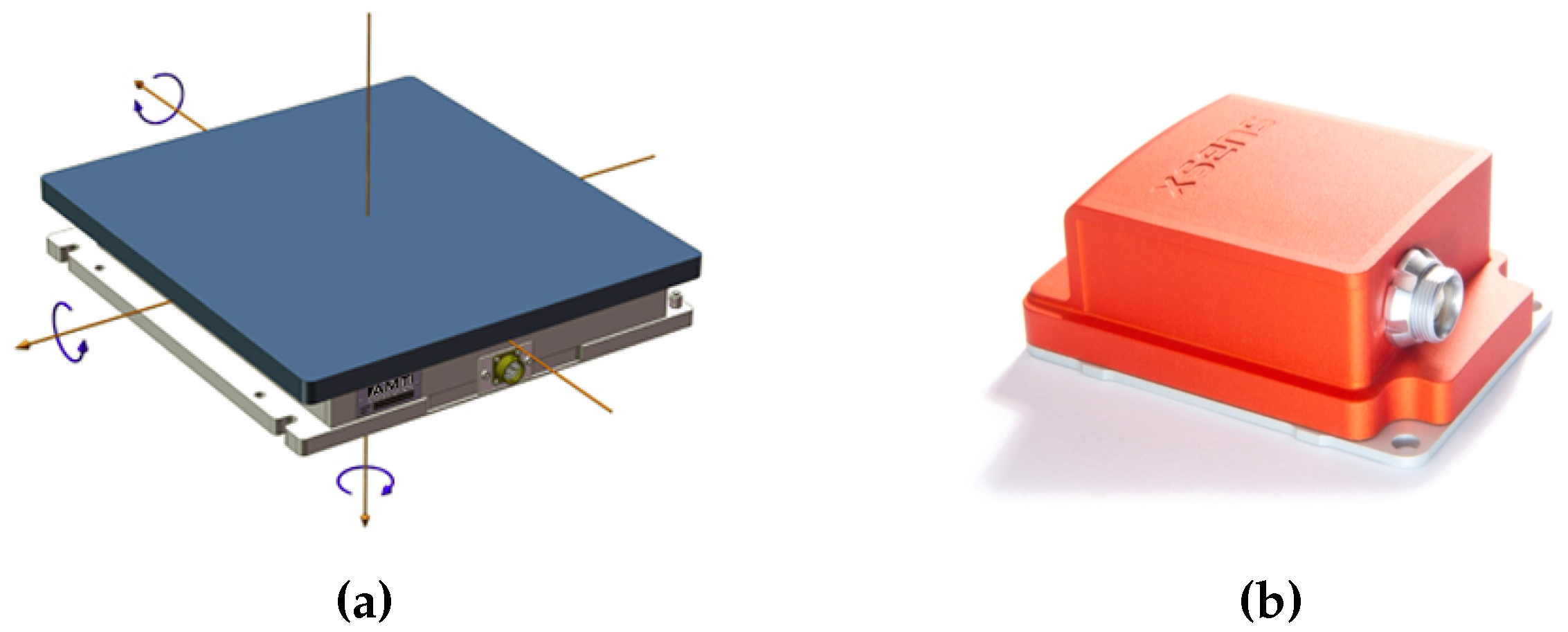
Human whole-body motion tracking is nowadays a well-established tool in the analysis of human movements. This tool has found a wide variety of real-world applications ranging from entertainment (movies and games) to sport and rehabilitation frameworks. Several commercial solutions for whole-body motion tracking are available. Well known examples include: a wearable marker-less technology suitable for outdoor motion capturing produced by Xsens [
1] (Xsens Technologies B.V., Enschede, Netherlands), a state-of-the-art marker-based technology for in-lab applications produced by Vicon (Vicon Motion Systems Ltd, Oxford, UK) and Microsoft Kinect depth camera system (Microsoft Corporation, Redmond, Washington), which allows marker-less low-cost whole-body motion tracking for indoor applications [
2]. In biomechanics, soft wearable and stretchable systems have been proposed for measuring human body motion [
3,
4], as well as in health activity monitoring [
5]. Combinations of different technologies have also been used for detecting human motion: in [
6], a video-based motion technique was adopted for capturing realistic human motion from video sequences. Although existing technologies provide a high level of accuracy in computing motion quantities, they have several limitations in their ability to measure kinetic quantities in real-time (kinetics considers forces that cause movements). A key problem lies in the fact that motion capture methods typically employ only kinematic measurement modalities (position, velocities and accelerations) [
7] and do not include information on the kinetics of human movements.
The importance of including and exploiting all dynamic information is a crucial point in several research areas such as ergonomics for industrial scenarios, developing prosthetic devices and exoskeleton systems in rehabilitation fields, or in human-robot interaction. For these reasons, whole-body force tracking is not a new challenge for the scientific community, but the topic has been seldom explored
in situ due to the computational difficulties of the analysis and even more rarely analyzed in real-time modality. Although several recent studies are going in this direction, it is limited to prototypical and non-wearable technologies. Typical non-wearable technologies involve the combination of a motion capture system (e.g., a Vicon camera system ), with commercial force plates and Newtonian physics to perform inverse dynamics computations . Some recent prototypes [
8] have been proposed for kinematics and dynamics motion capture. The suggested approach involves a Kinect-like sensing and pressure-sensing shoes to reconstruct the whole-body dynamics.
To obtain forces and torques acting on a body, accurate data on the mass, center of mass and inertias of each body segment are needed. Different methods for the determination of body segment parameters can be described in [
9], but the real difficulty is that a universal acknowledged procedure for estimating inertial parameters with accuracy does not exist yet. In this framework, it is fundamental to specify exactly what the kinematics and external boundaries are.
Towards compensating for aforementioned drawbacks, one approach is to supplement or even replace standard marker-based technologies in several applications with a system design embedding a combination of Inertial Measurement Unit (IMU) sensors and force sensing for evaluating contact forces. However, in order to properly model and understand the role of dynamic quantities, an appropriate understanding of the dynamic interaction between the elements of the models (such as reaction and contact forces, accelerations of links and forces exchanged between them) is needed.
Inspired by a recent research study on sensor fusion for whole-body estimation on the humanoid iCub robot [
10] (Istituto Italiano di Tecnologia, Genova, Italy), in this paper, we propose a novel framework for wearable dynamics (
WearDY) aiming to bridge the gap in dynamics analysis by fusing motion and force capture. The novelty of the approach consists of framing computations in a probabilistic Gaussian framework in the presence of redundant (and noisy) measurements. In this way, sensors play an
active role in the computation since the classical boundary condition in recursive Newton–Euler algorithms (
i.e., linear-angular velocities and acceleration at the base link and forces–torques at the end-effector) are replaced with measurements coming from sensors.
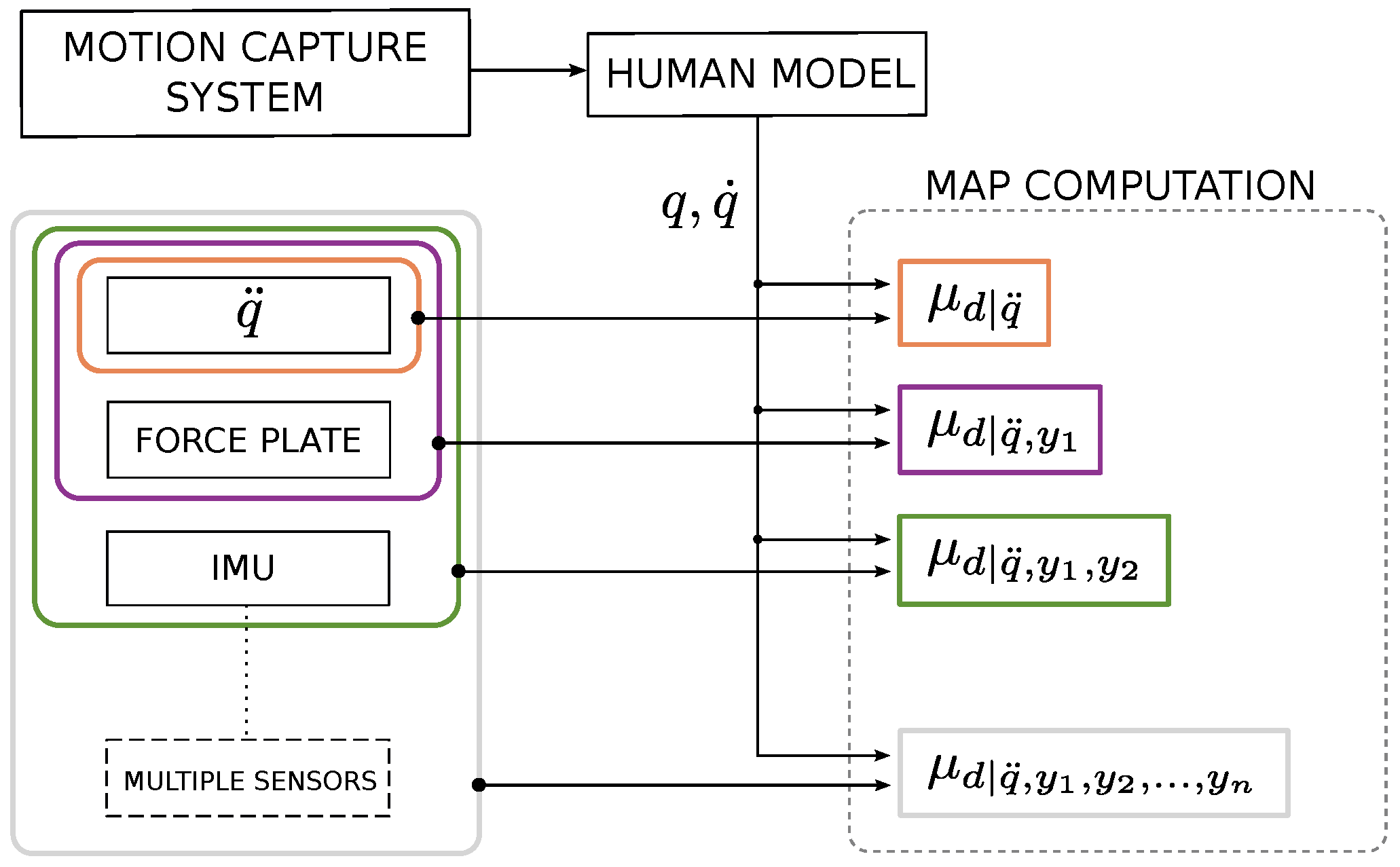
WearDY is an attempt at combining dynamic computations with stochastic estimation of dynamics variables. The early stage of
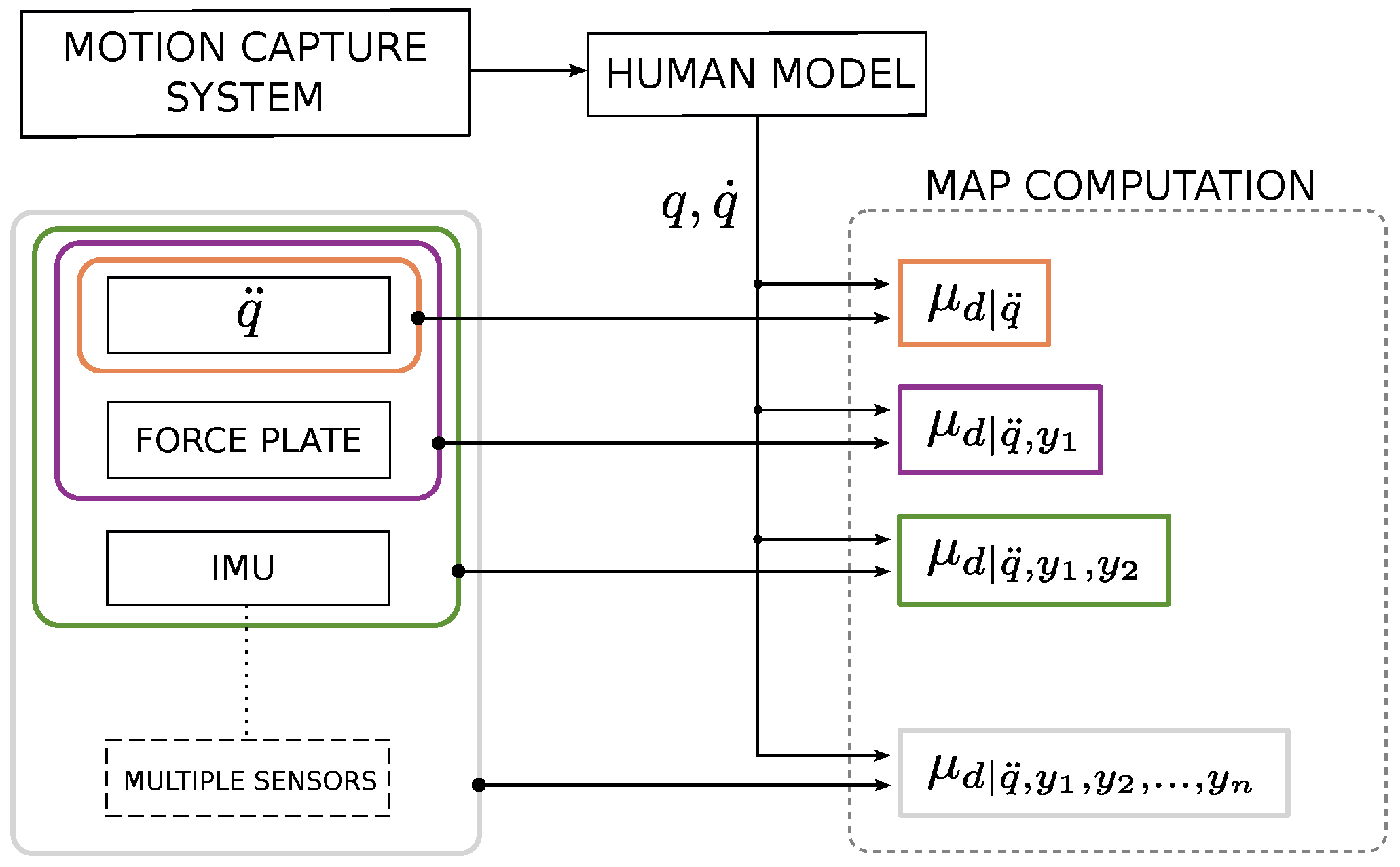
WearDY tool encompass different modules: (1) a motion capture system computing human joint model configuration and kinematics; (2) an additional inertial sensor; (3) force platform sensing; and (4) a probabilistic algorithm framework. The final prototype will replace the motion capture system with a soft wearable suit embedding sensing structure.
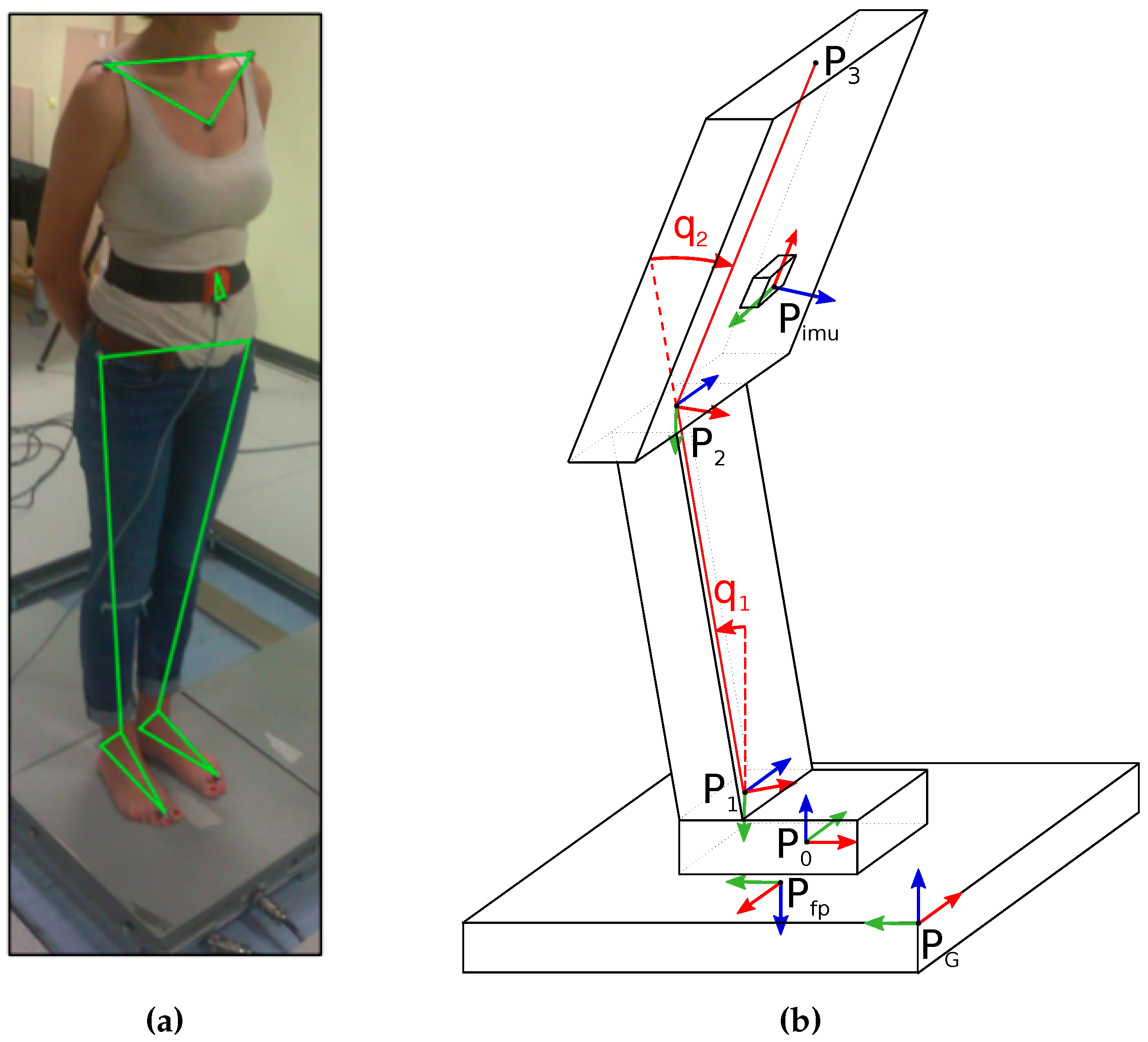
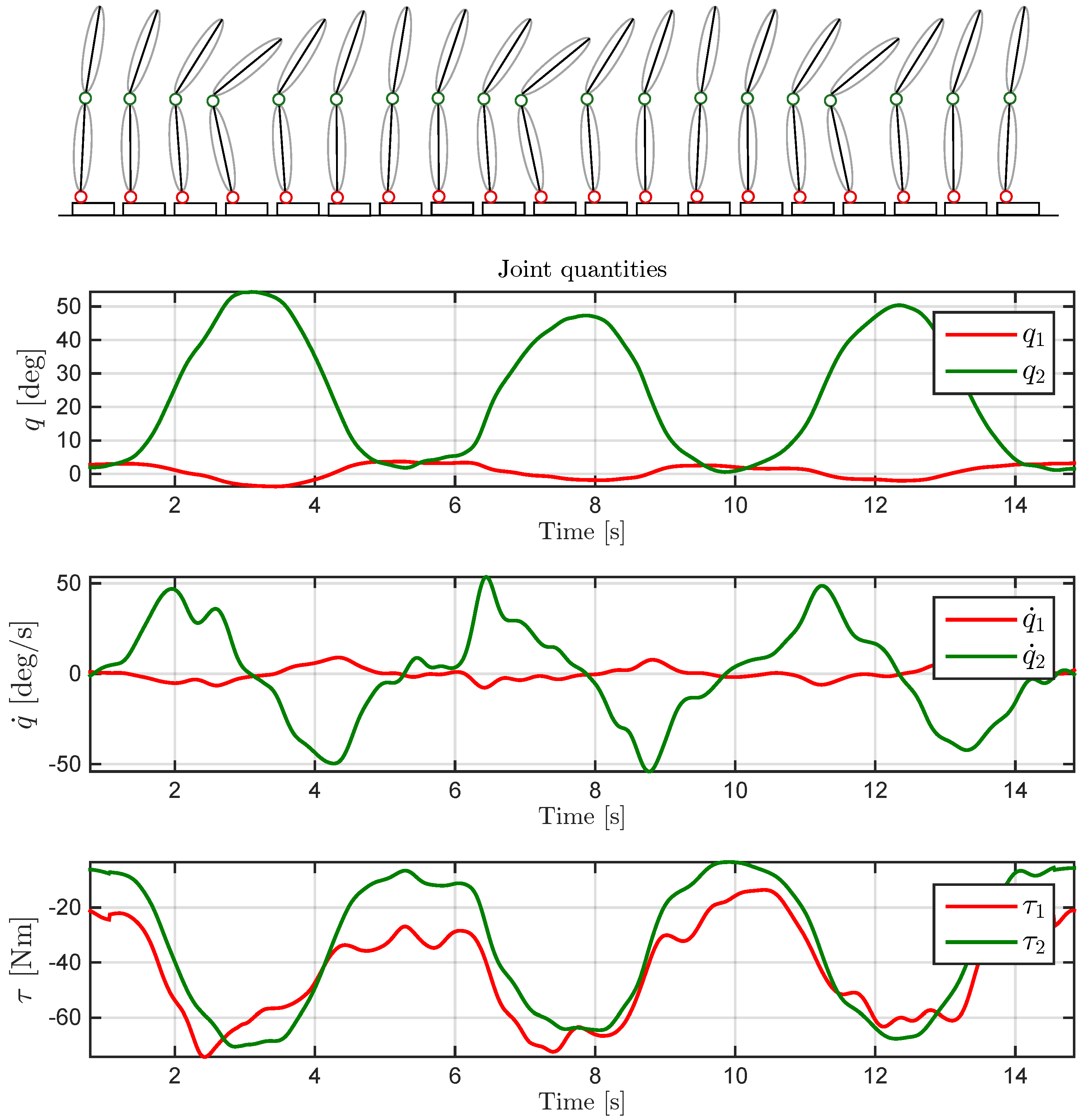
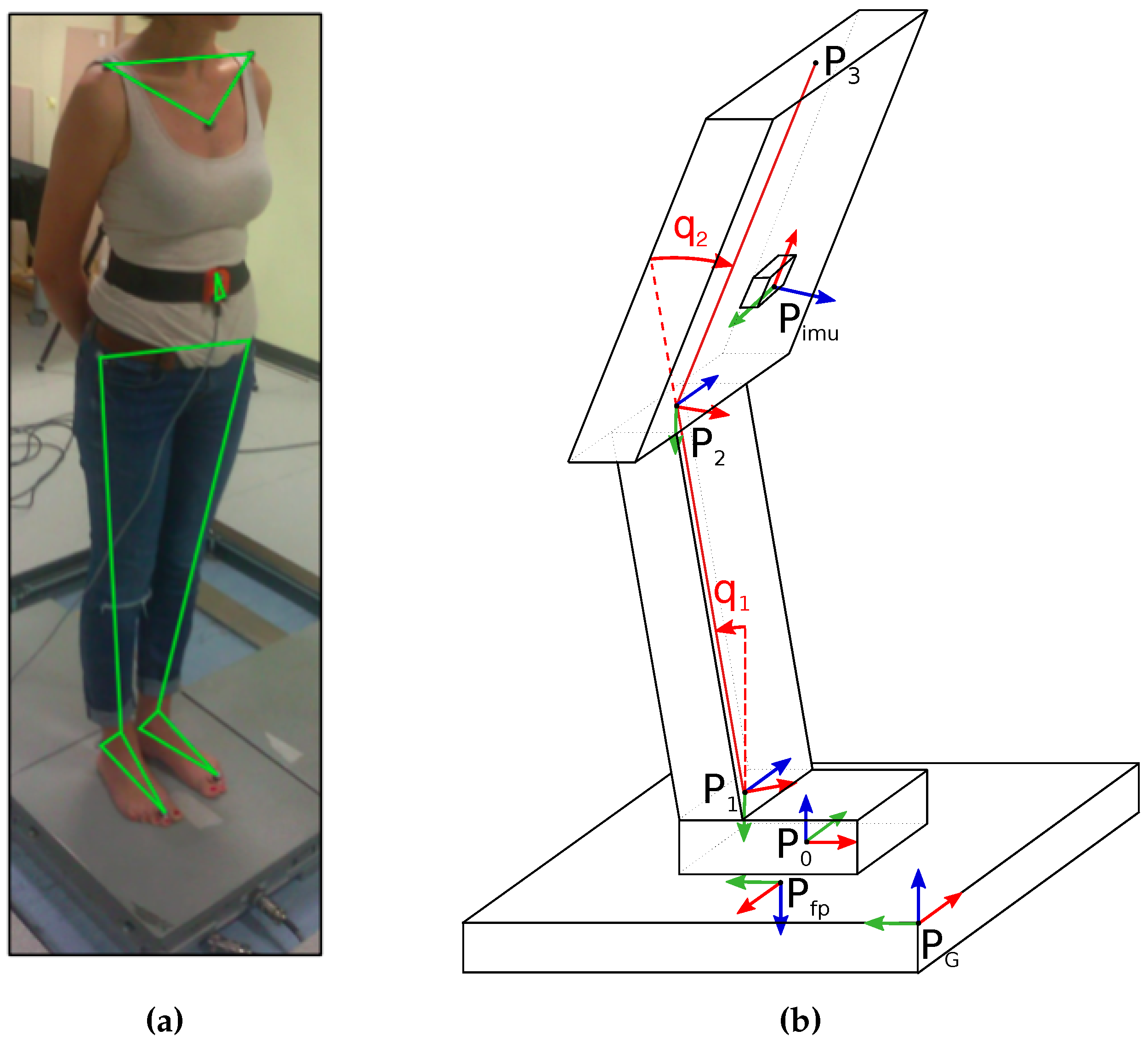
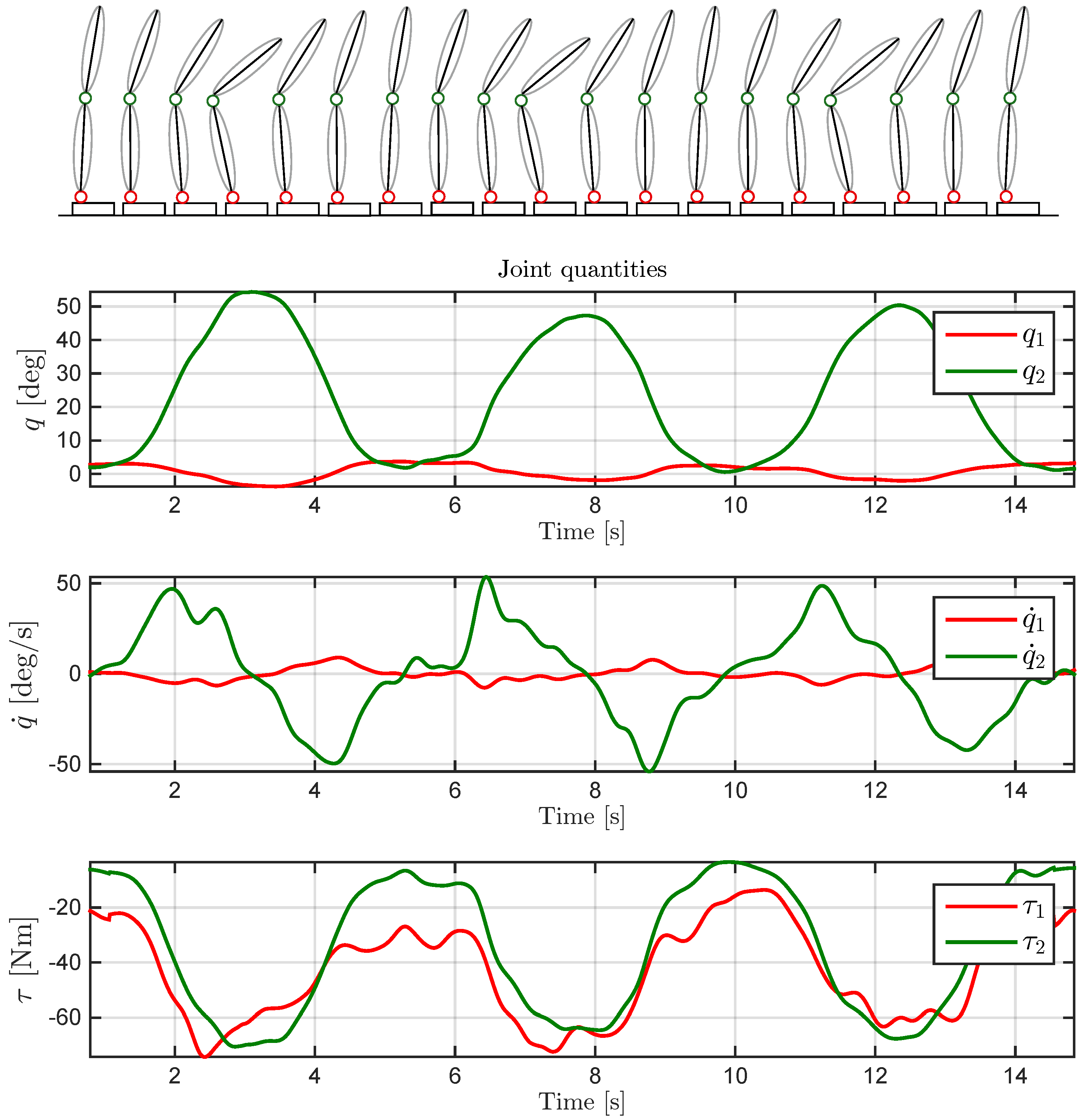
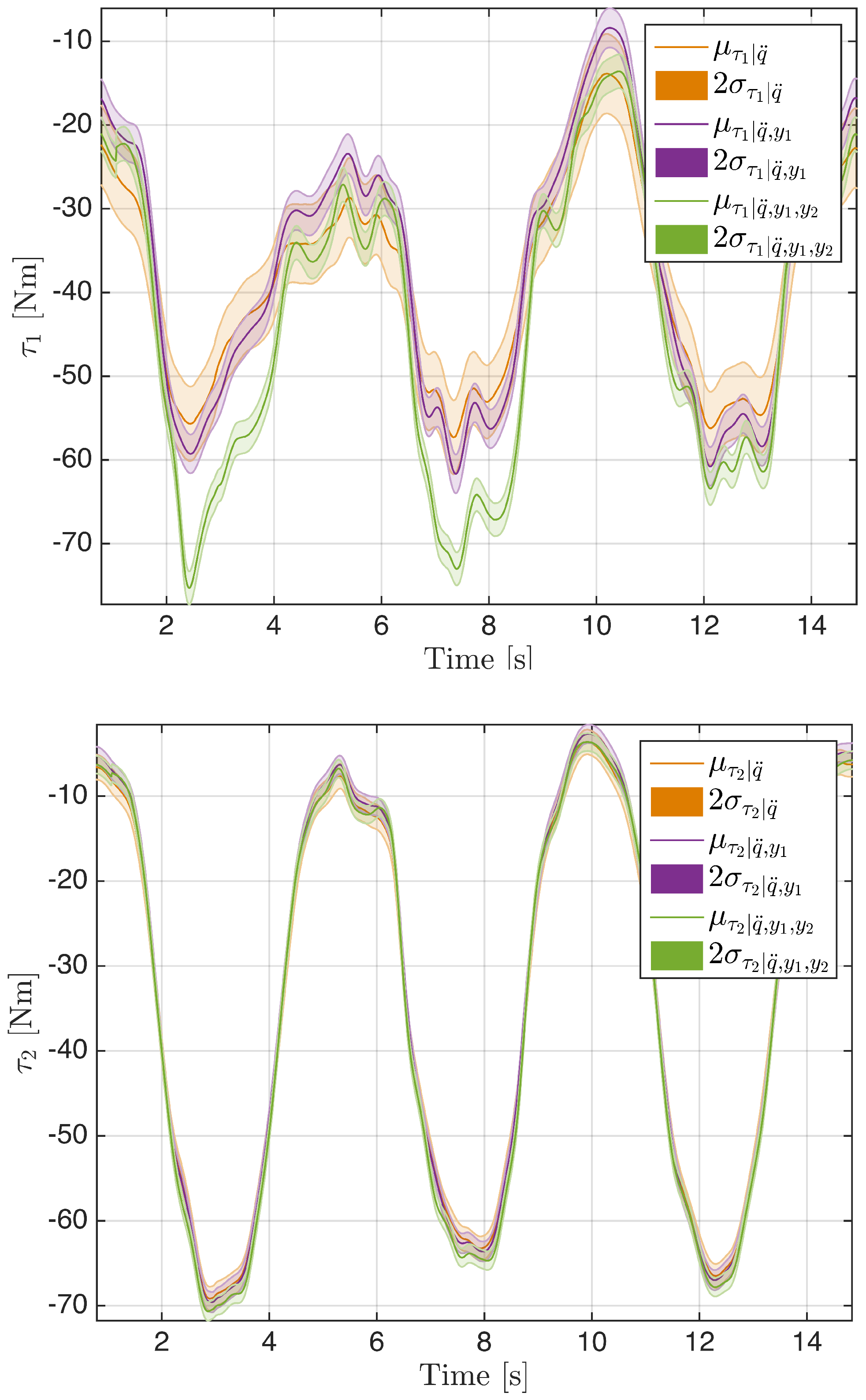
In this paper, we focus mainly on describing the fourth module and its integration into the physical tool. We test the WearDY prototype on human subjects performing a two Degrees-of-Freedom (DOF) bowing task. The subjects are equipped with the basic elements of the proposed suit in the form of a chest-mounted IMU, a conventional motion capture system along with a force plate. The Gaussian algorithm is then applied to compute joint torques as well as other dynamic quantities such as link accelerations and transmission forces throughout the motion. The results demonstrate the applicability of the proposed method for the simultaneous force and motion tracking in dynamic motion.
The paper is structured as follows.
Section 2 presents an overview of some important definitions of the algebraic notation used for computations along with the assumptions on the dynamic model.
Section 3 provides an analytic statement of dynamic analysis wherein the probabilistic computation is framed. In
Section 4, the probabilistic estimation theory is shown. The experimental analysis on human subjects is presented in
Section 4 followed by concluding remarks in
Section 4.
3. Problem Statement and Formulation
The dynamic estimation algorithm has been originally developed in [
10] as a framework for the probabilistic estimation of whole-body robot dynamics with redundant measurements. The methodology was here adapted to fit the needs of the human motion. The present section discusses the estimation problem in details. After discussing the recursive Newton–Euler algorithm for inverse dynamics computation in
Section 3.1, we arrange the resulting equations in a matrix formulation (
Section 3.2).
Section 3.3 introduces the estimation problem by discussing the case in which the boundary conditions of the Newton–Euler algorithm are replaced with a set of redundant measurements expressed in a new equation form.
3.1. Recursive Newton–Euler Algorithm
In [
11], the inverse dynamics problem is formulated as the problem of finding the forces required to produce a given acceleration. It can be summarized by the following function:
In biomechanics literature, different inverse dynamics approach are used [
13]. Let us assume use of a "top-down" approach. We will assume that all quantities depending on
q and
have been precomputed, including the transformation matrices
,
and the velocities
,
which can be efficiently computed with the following recursive equation:
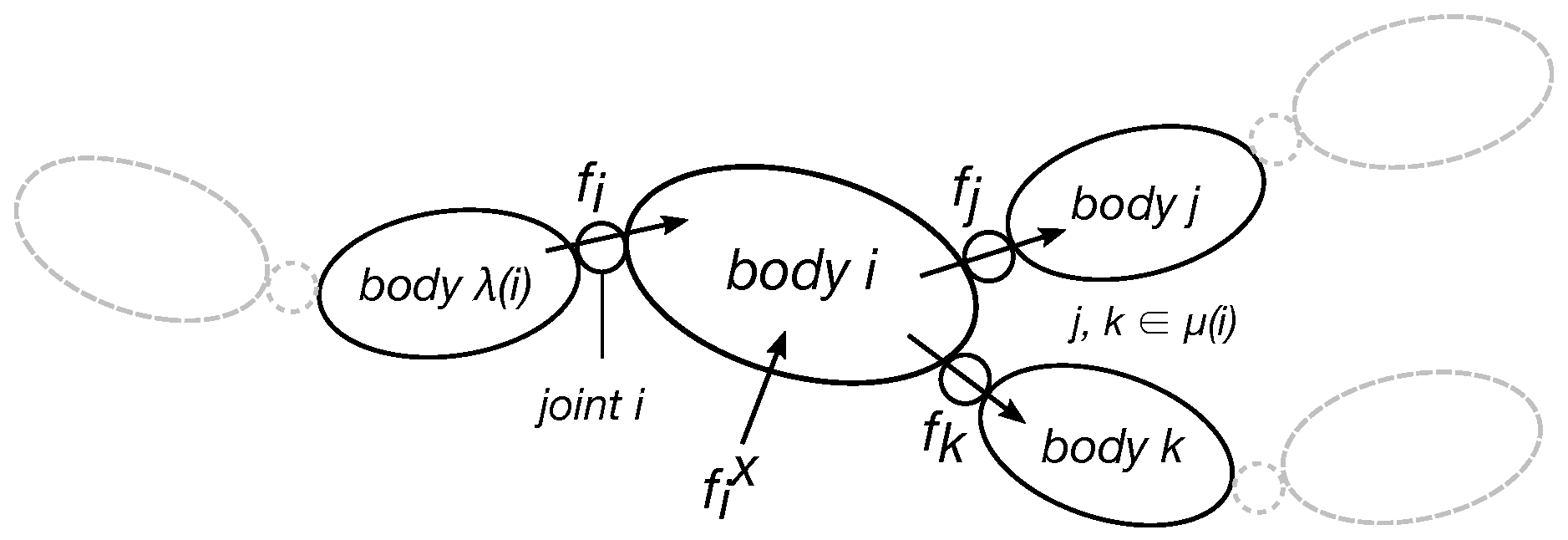
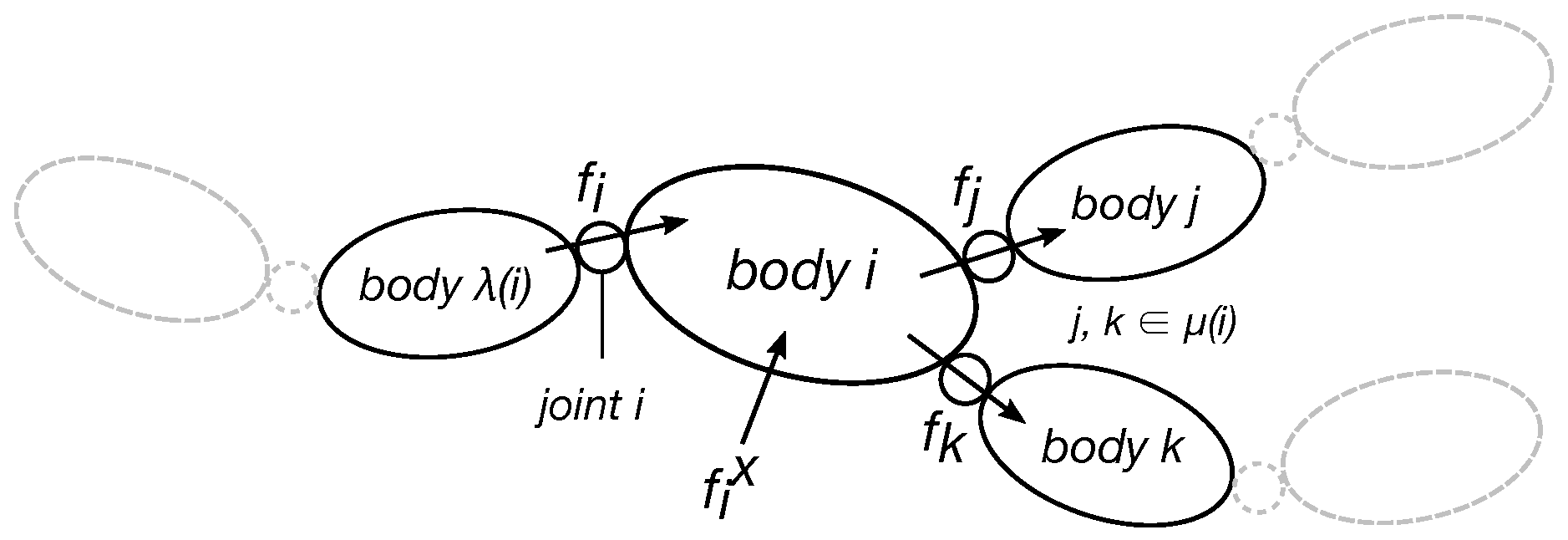
A classical efficient numerical solution of inverse dynamics problem is given by the recursive Newton–Euler algorithm (RNEA) consisting of the following steps, expressed in body
i coordinates:
Equations (1a), (1b) and (2a) are propagated from to with initial conditions and , which corresponds to the gravitational spatial acceleration vector expressed in the body frame 0 (null in its first three components and equal to the gravitational acceleration in the last three). Equations (2b)–(2d) are propagated from to 1.
3.2. RNEA Matrix Formulation and the Measurements Equation
In this section, a matrix arrangement of the RNEA is presented. Equation (2) can be seen as a set of equations which the below listed
dynamic variables have to satisfy. Let us first define a spatial vector
d of dynamic variables as follows:
Given Equation (3), Equation (2) can be compactly written in the following matrix equation:
where
D is a block matrix
and
is a vector
. Let us define how to build
D matrix and
vector:
Remarkably, Equation (4) represents the set of linear constraints in
d and, in a sense, inverse dynamic computation consists of computing
d given
and
. Our contribution is in moving away from this classical approach replacing RNEA boundary conditions with measurements coming from sensors. For this purpose, let us also define an explicit equation for measurements by indicating with
y the values vector measured by sensors:
The structure of
Y matrix depends on the number of sensors
used for each link
i as follows:
being
the amount of sensors. With the same methodology, the structure of the bias vector
is also defined:
3.3. Considerations on the Representation
Equation (4) is one of many possible representations of the system dynamics. A common alternative description is the one obtained with the Euler–Lagrange formalisms [
12]:
These equations can be obtained from Equation (4) as hereafter described. First, the vector
d and the columns of
D should be rearranged so that they respect the following order:
,
,
,
,
and
. The resulting
D and
b are:
With this reorganization, the Euler–Lagrange equation can be obtained as follows:
There are two reasons for preferring Equation (4) to alternative formulations such as the Euler–Lagrange equation. On the one hand, Equation (4) can be used to represent uncertainties that capture relevant modeling approximations (see also
Section 3.4). In particular, approximations result from the fact that human bones coupling is neither rigid nor purely rotational and these can be captured with additive noise Equation (9) on Equation (2). More accurate models would be possible [
14], but Equation (9) would still capture approximations on bone couplings, which are often relevant and meaningful. On the other hand, there are numerical advantages associated to Equation (4). In the case of inverse and forward dynamics, the numerical advantages are exactly those obtained by algorithms like the RNEA and the ABA (Articulated-Body Algorithm) presented in [
11] and whose relations to Equation (4) is discussed in [
10].
3.4. Over Constrained RNEA
Combining properly Equations (4) and (5), we obtain:
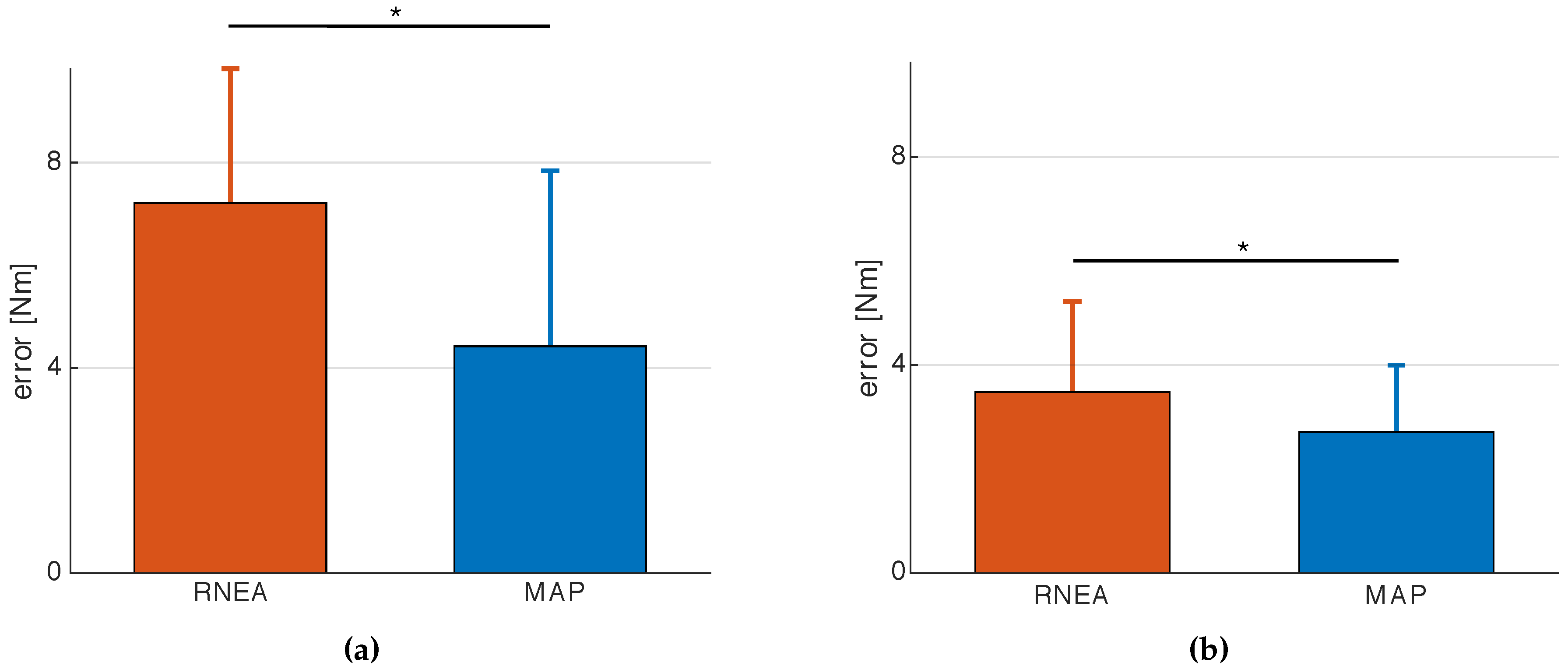
Since our main purpose is to make WearDY a versatile and flexible tool, we consider the incorporation of redundant (and noisy) measurements involved in the analysis. Within this new framework, there might be conditions in which Equation (6) becomes overdetermined and an exact solution does not exist. If there is a valid reason to assume that all the constraints have equal relevance, we can use the Moore–Penrose pseudo-inverse to obtain a least square solution. Otherwise, if we have good reason for weighting differently the constraints, we can use the weighted pseudo-inverse to obtain a weighted square solution. However, finding proper weights might be not an easy task. Our solution, proposed in the next section, is framing the estimation of d given y in a Gaussian framework by means of a minimum-variance estimator.
4. Maximum a Posteriori (MAP) Estimator
The first assumption for adopting the
Maximum a Posteriori (MAP) estimation approach is to consider
d and
y as stochastic variables with Gaussian distributions. Let us first define their suitable joint probability density using the factorization
being
the probability density and
its conditioned version. Given
, we can compute an estimation of
d using a MAP estimator (which, in Gaussian distributions, coincides with the mean of the distribution) as follows:
where we applied Bayes’ rule,
i.e.,
, and where we omitted the term
since it does not depend on
d and does not contribute to the optimization.
Let us first give an expression for
:
which implicitly makes the assumption that the measurements from Equation (5) are affected by a Gaussian noise with zero mean and covariance
. Its probability distribution is:
The second assumption is to define a probability density for
d. Pursuing the same methodology, we would like to have the following distribution
:
taking into account constraints in Equation (4) with
.
However, this intuitive choice leads to a degenerate normal distribution and a term of regularization has to be adopted. For example, if we have a Gaussian prior knowledge on
d in the form of
distribution, we can reformulate Equation (8) as
:
with
Given Equations (7) and (9), we can build the joint probability as
being
where Equation (11b) is exactly the estimation
.
On the Benefits of MAP Dynamics
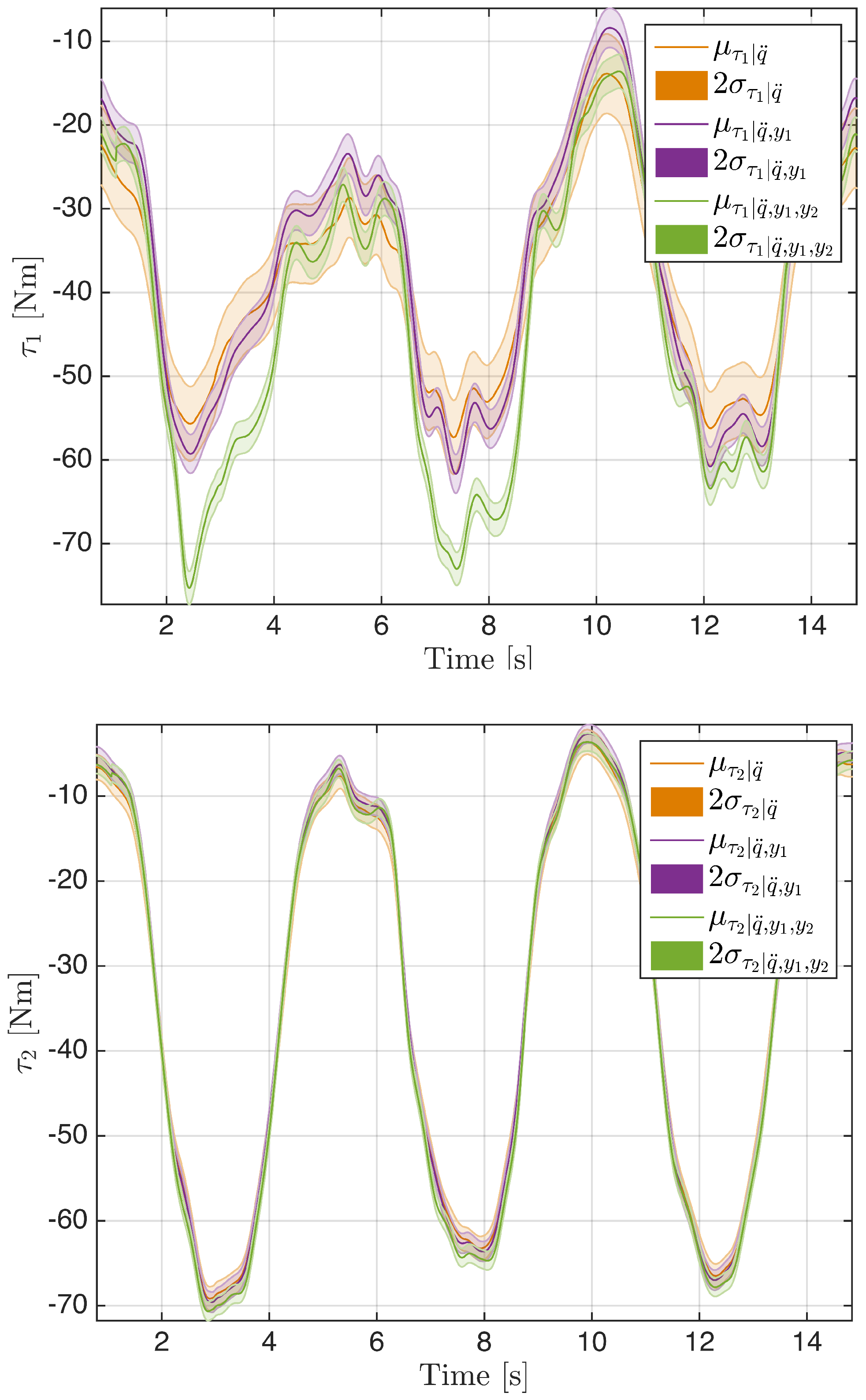
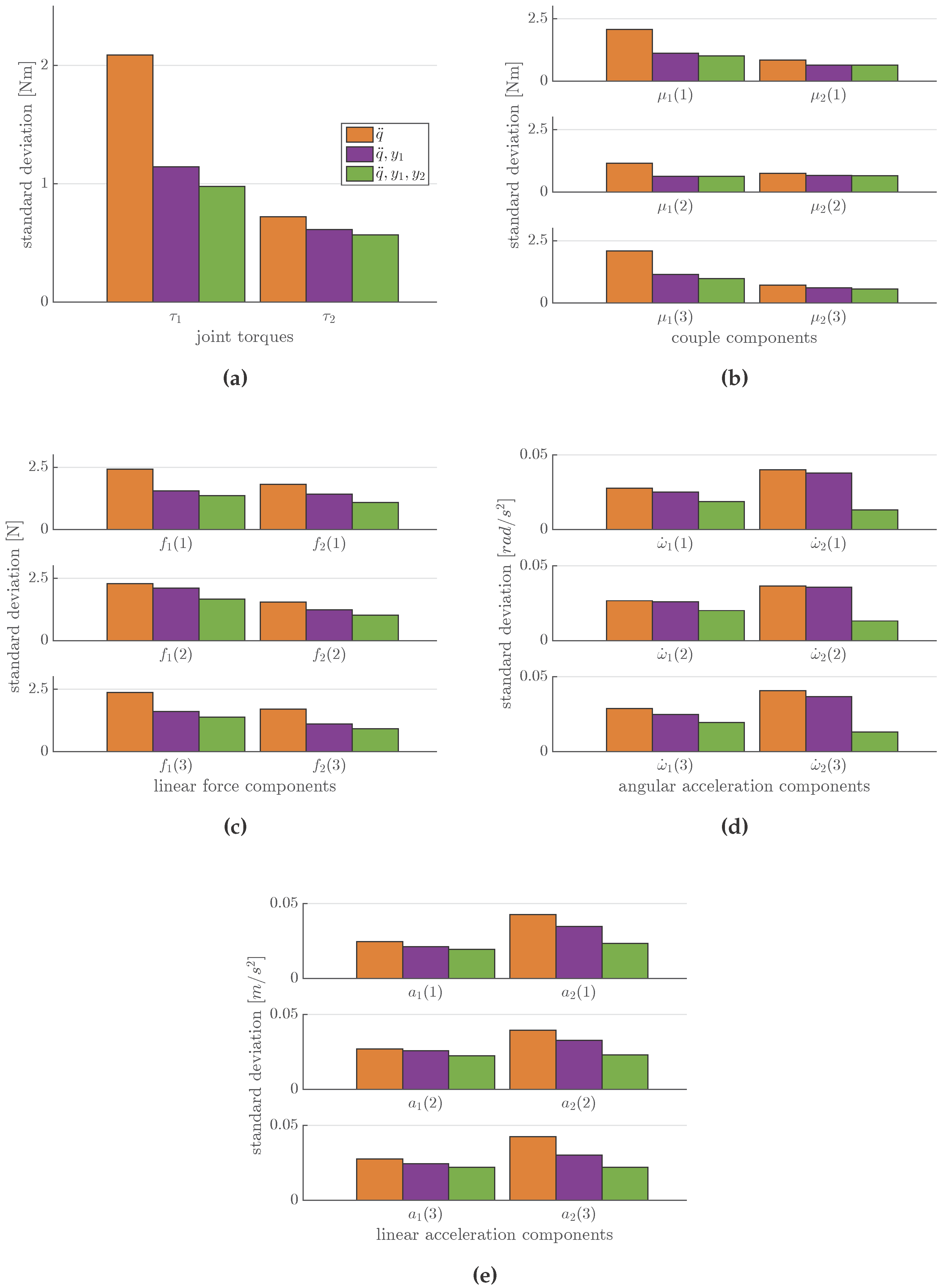
In this section, we discuss the benefits of multi-sensor data fusion for solving the dynamic estimation problem by characterizing the effects of data fusion on the covariance of associated estimator. The general idea we would like to pursue is that the more sensors we use in the estimation, the better the estimation itself will be (see
Appendix A for the metric used for the estimation quality). Since we are interested in the analytic solution of MAP, the estimator must have the following covariance (combining Equations (11a) and (10a)):
Assuming multiple measurements
,
,
statistically independent, this implies a diagonal structure to the matrix
. Thus, we have:
With an abuse of notation, let us denote with
the estimator which exploits all measurements up to
i-th,
i.e.,
. The addition of one measurement induces changes in the associated covariance matrix according to the following recursive equation:
where, for
, the initial condition is
.
Considering the Weyl inequality for the largest eigenvalue
of Equation (13) (see
Appendix B):
The maximum benefit is obtained by lowering the upper bound on . Trivially, this can be obtained by choosing high values for all the eigenvalues of . Obviously, this is not always possible and benefits can be obtained by maximizing .







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}