
An Improved Alignment Method for the Strapdown Inertial Navigation System (SINS)

Abstract
:1. Introduction
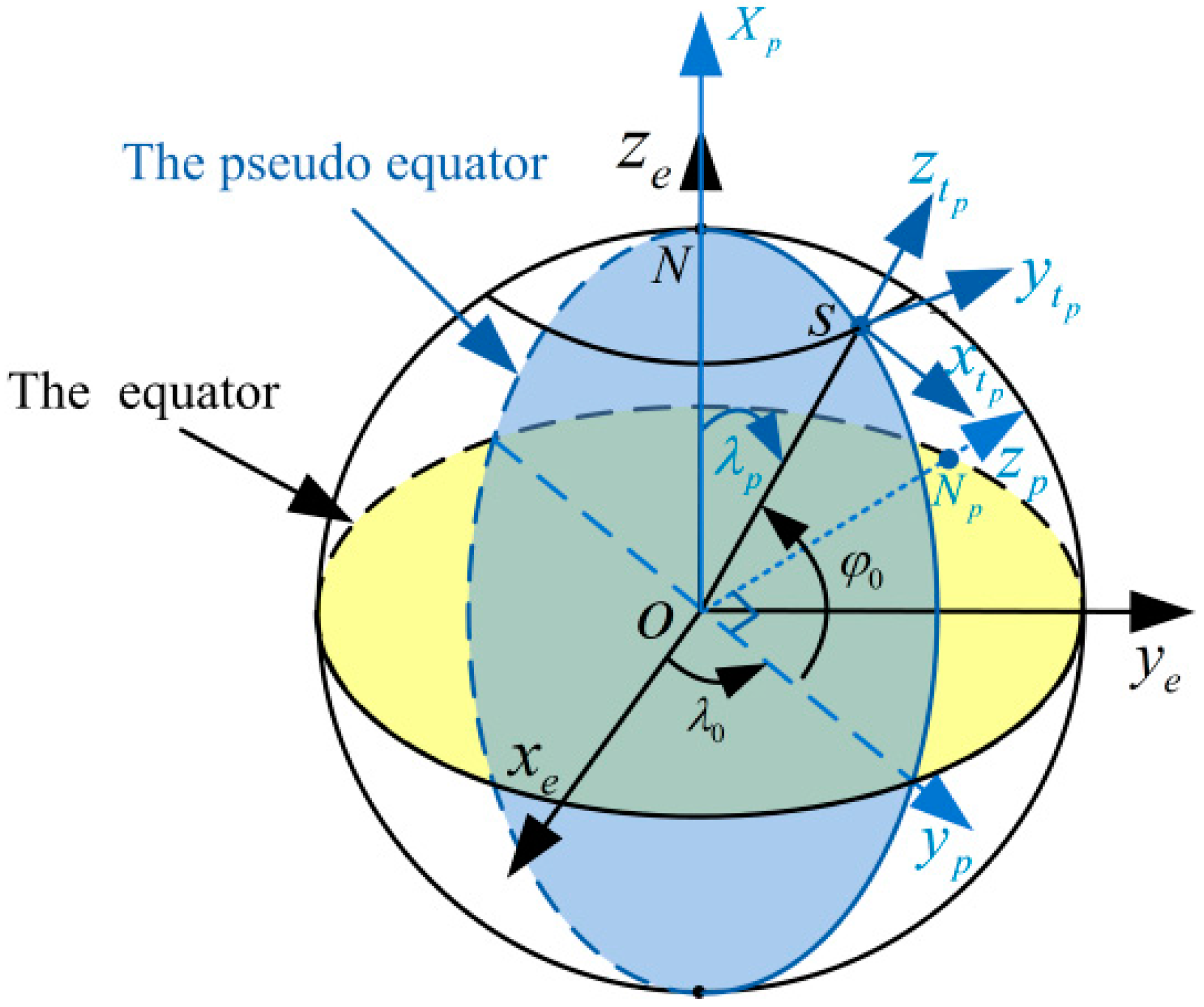
2. Reference Frames Definition
- -frame: Earth-Centered Initially Fixed (ECIF) orthogonal reference frame.
- -frame: Earth-Centered Earth-Fixed (ECEF) orthogonal reference frame.
- -frame: Orthogonal reference frame aligned with East-North-Up (ENU) geographic frame.
- -frame: body frame.
- -frame: navigation frame.
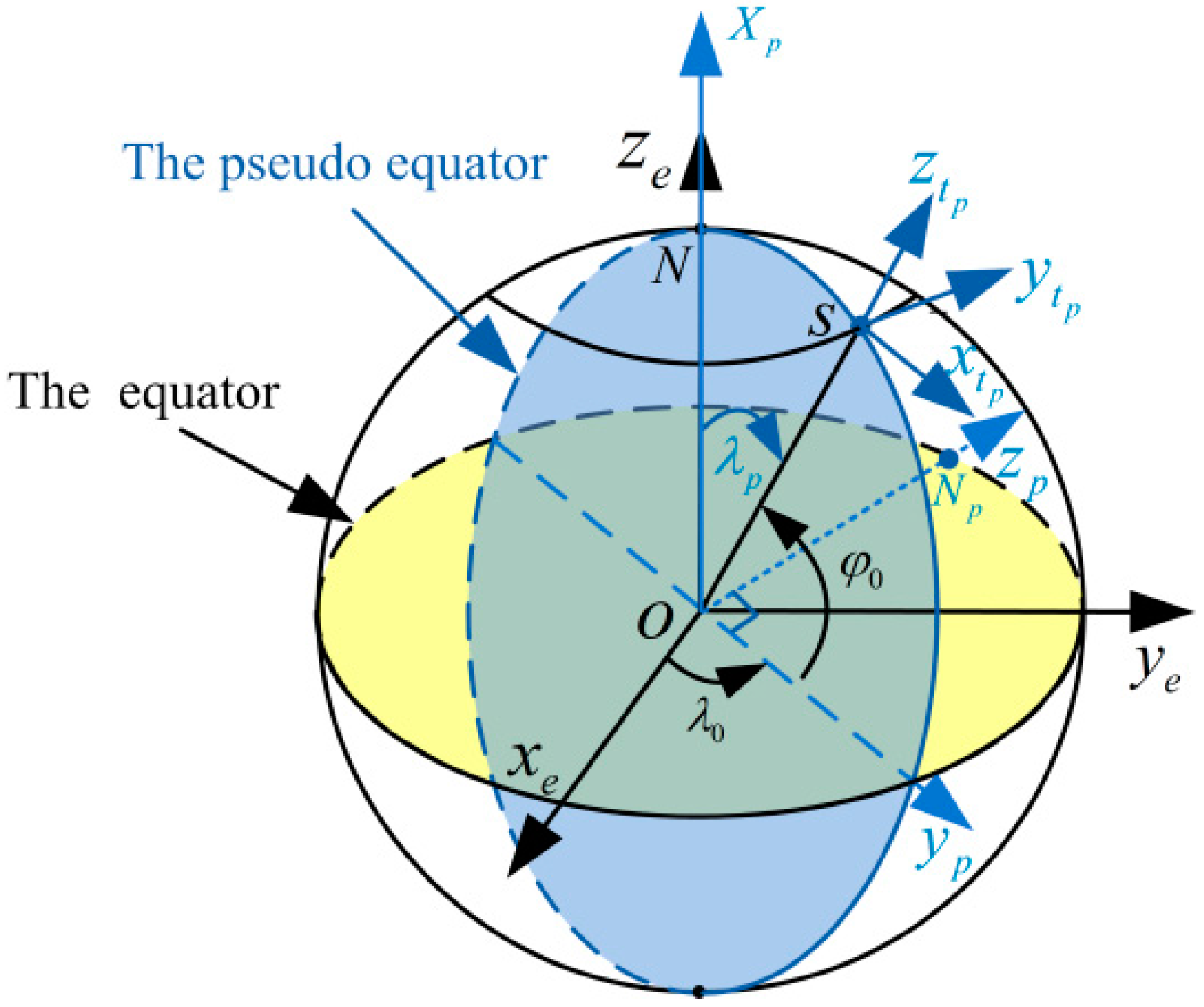
- -frame: Pseudo-Earth-Centered Earth-Fixed (PECEF) orthogonal reference frame obtained by two successive transformations from -frame.
- -frame: pseudo-orthogonal reference frame aligned with pseudo-East-North-Up pseudo-geographic frame.
3. The Analysis of Problem
4. The Principle of the Proposed Algorithm
4.1. The Definition of the Pseudo-Frame
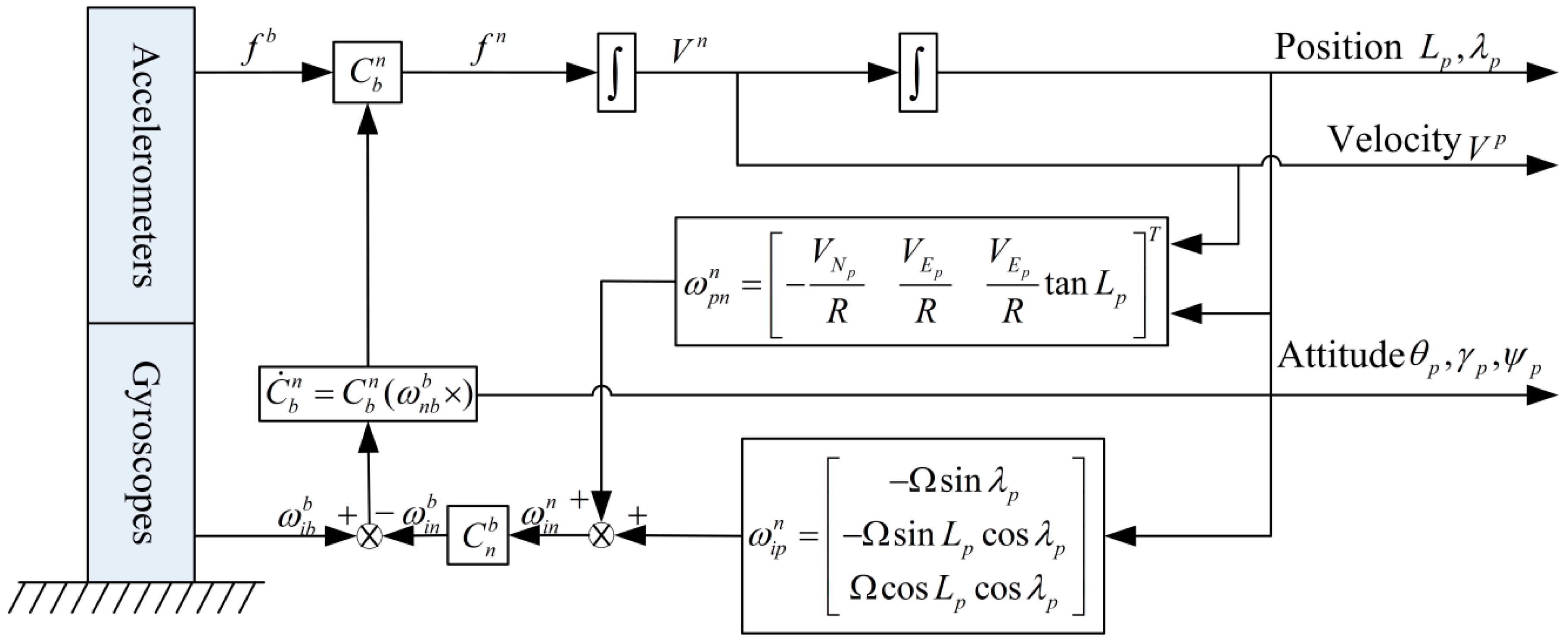
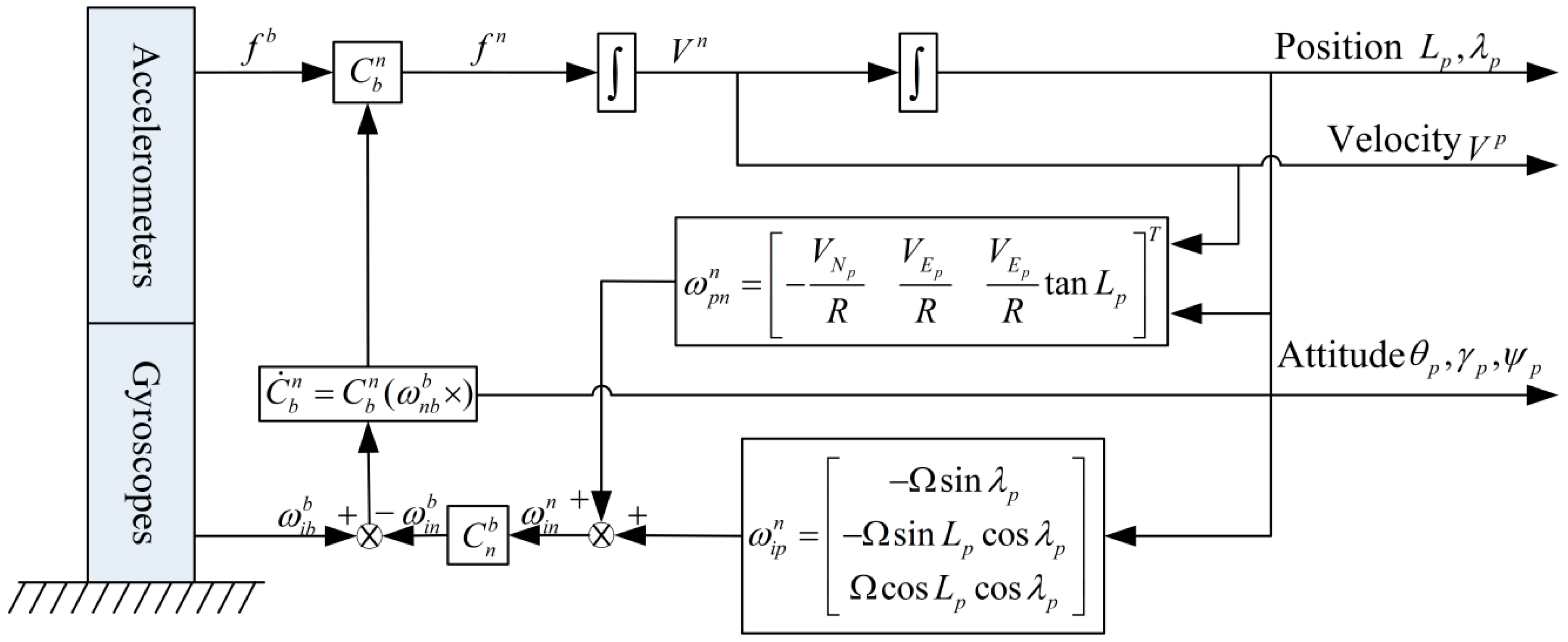
4.2. The Mechanization of the SINS in Pseudo-Frame
4.3. The Static Error Equations of the SINS in Pseudo-Frame
- The velocity error equations:
- The attitude error equations:
- The position error equations:
5. The Filter Model of Kalman for Zero-Velocity Alignment
6. Simulations and Experiments
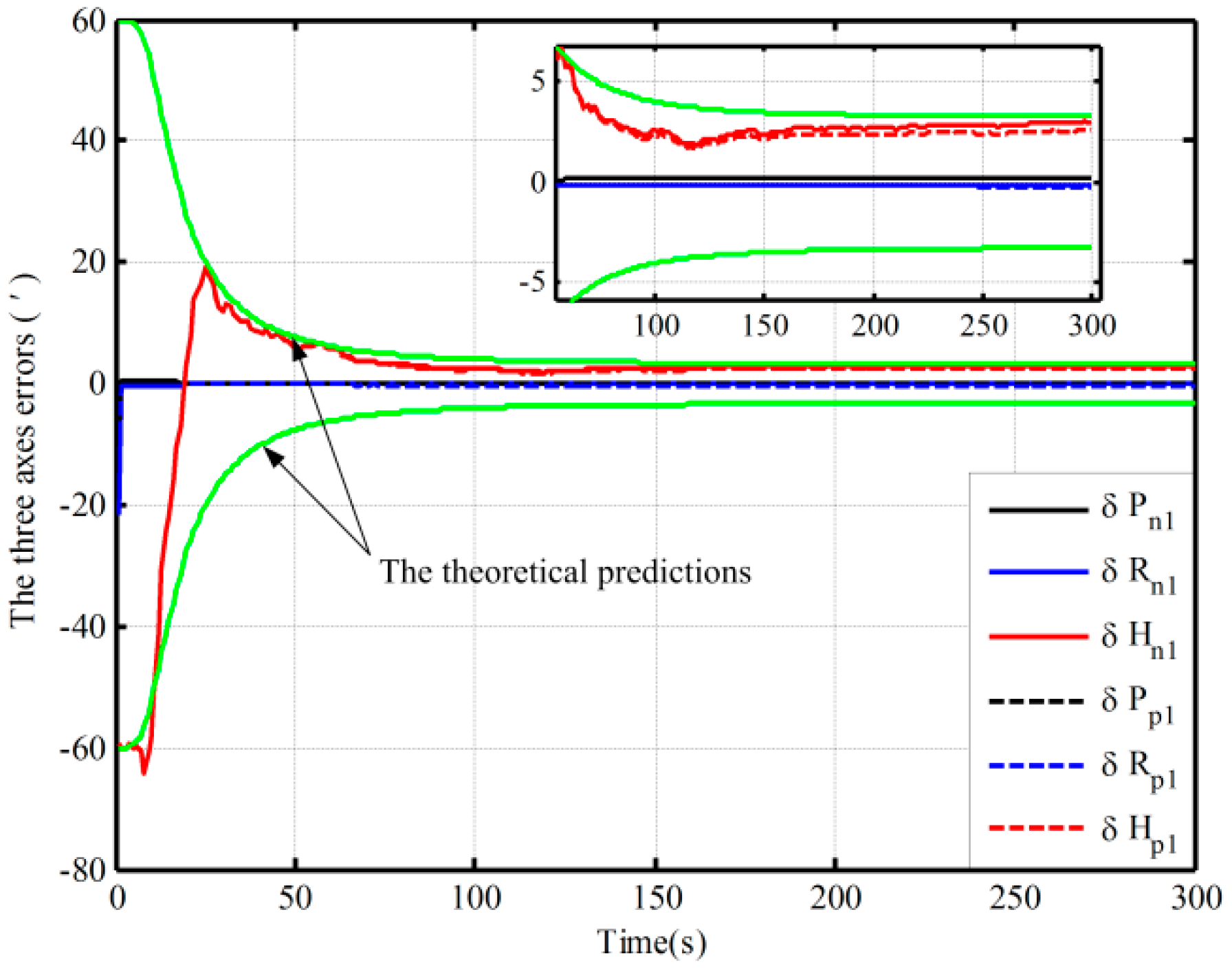
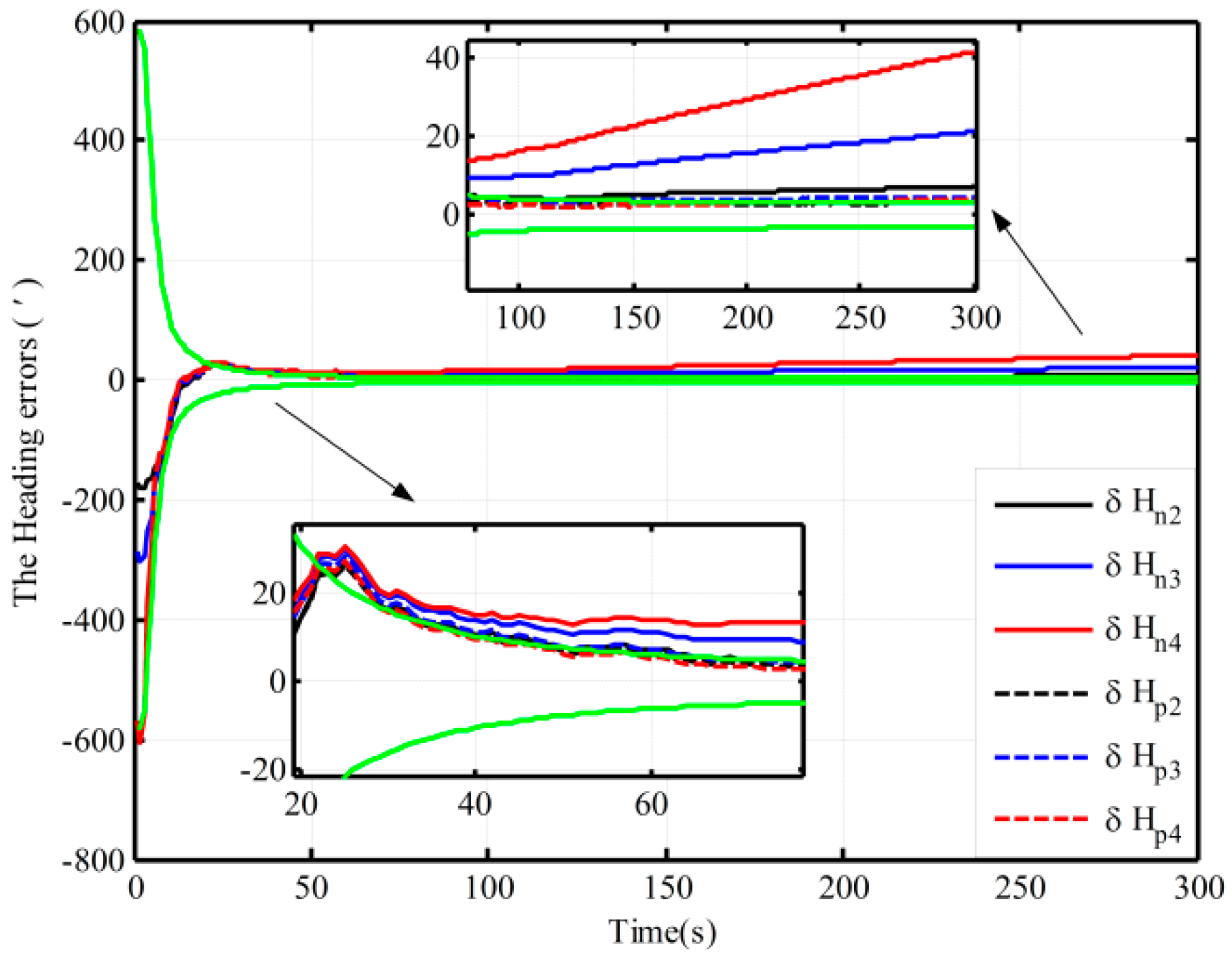
6.1. The Simulations of Fine Alignment Assisted by the KF
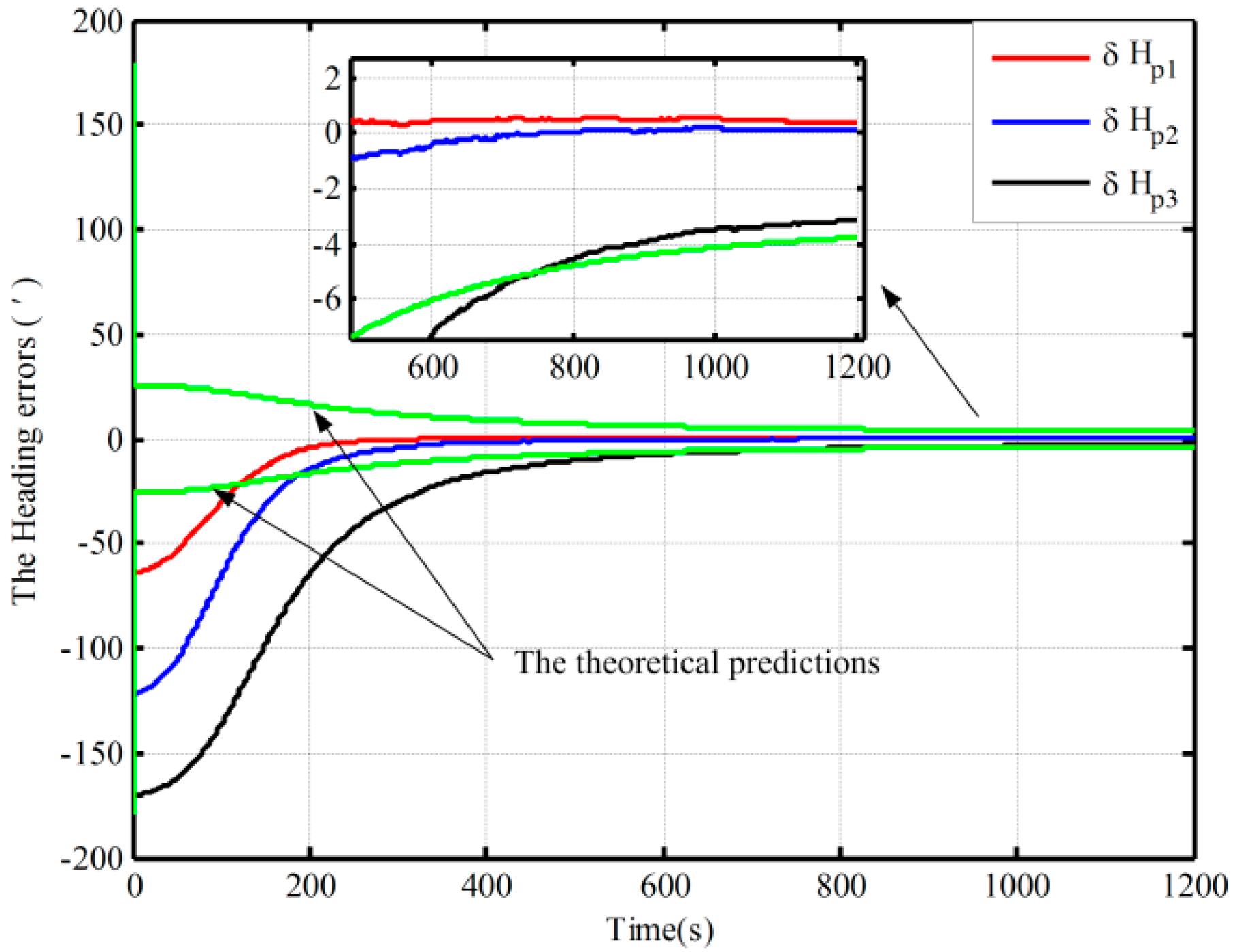
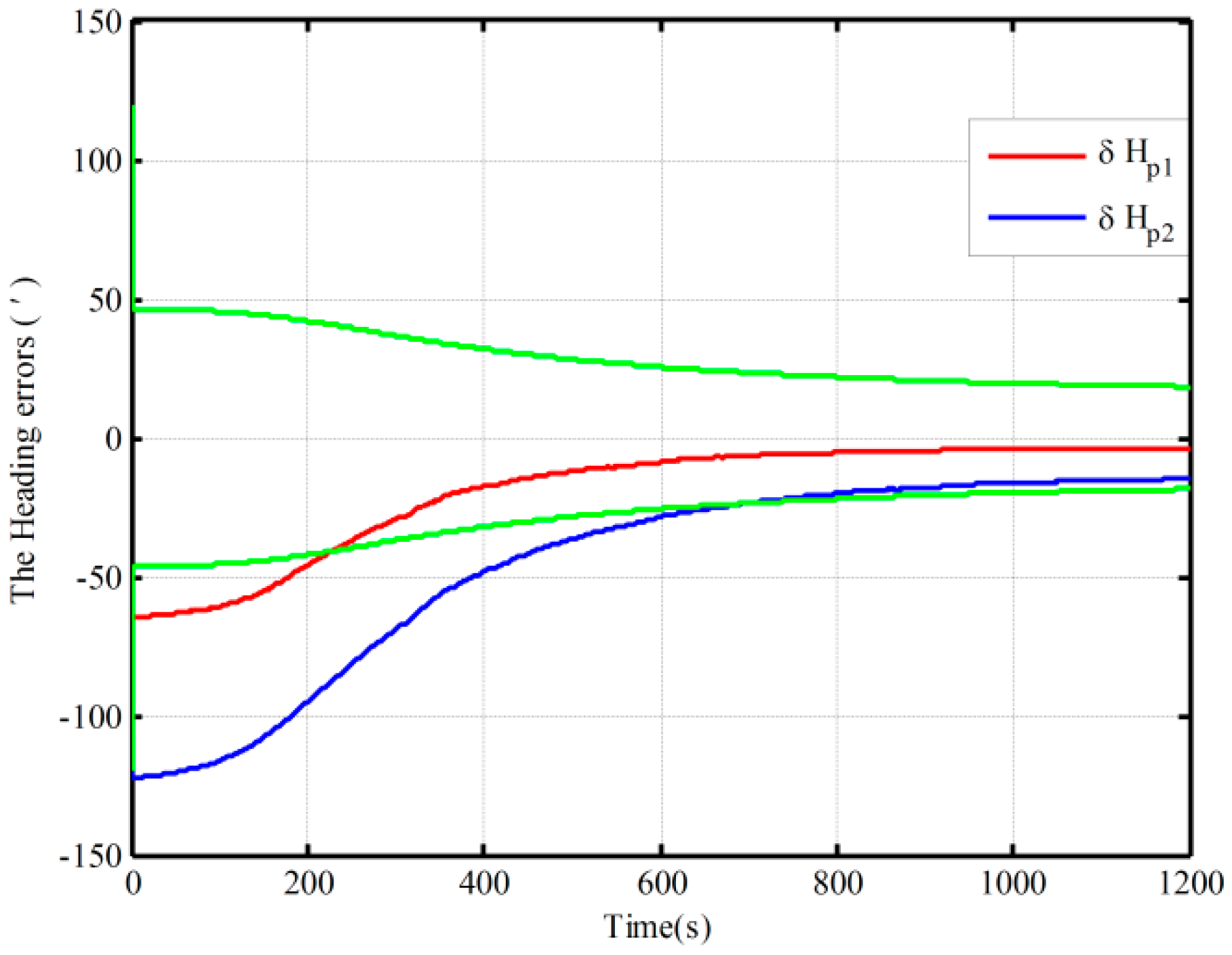
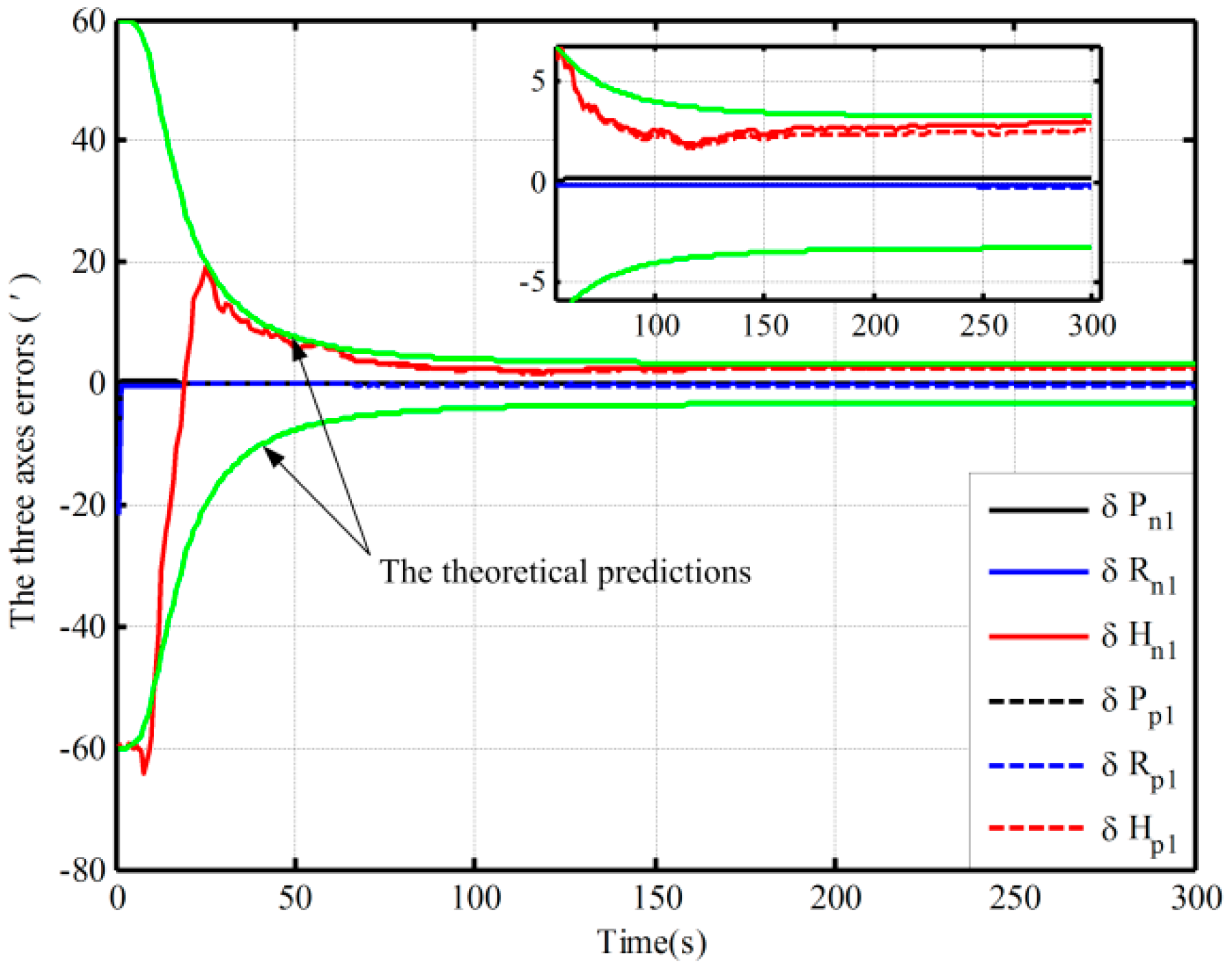
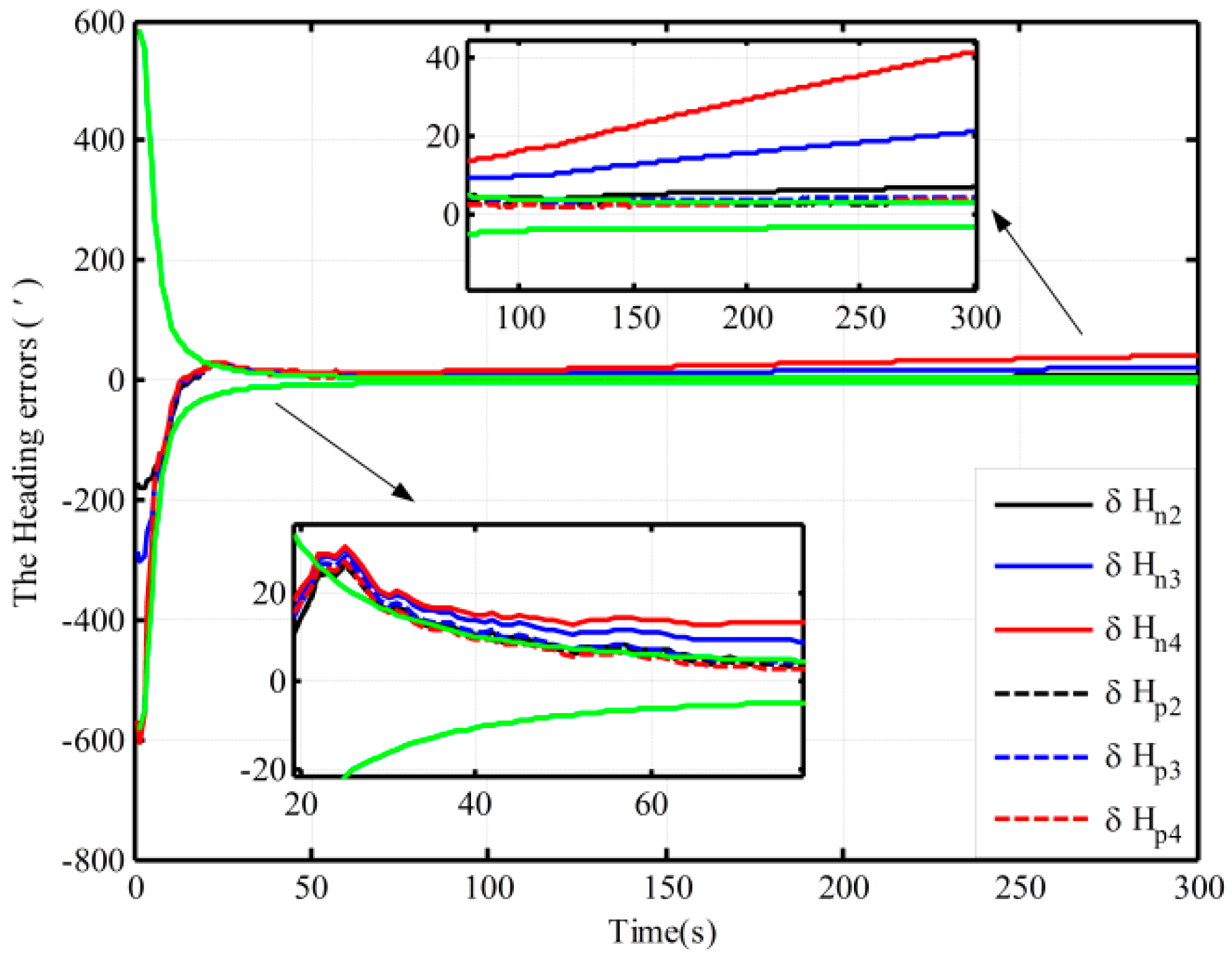
6.1.1. The Simulations Based on the Open-Loop KF
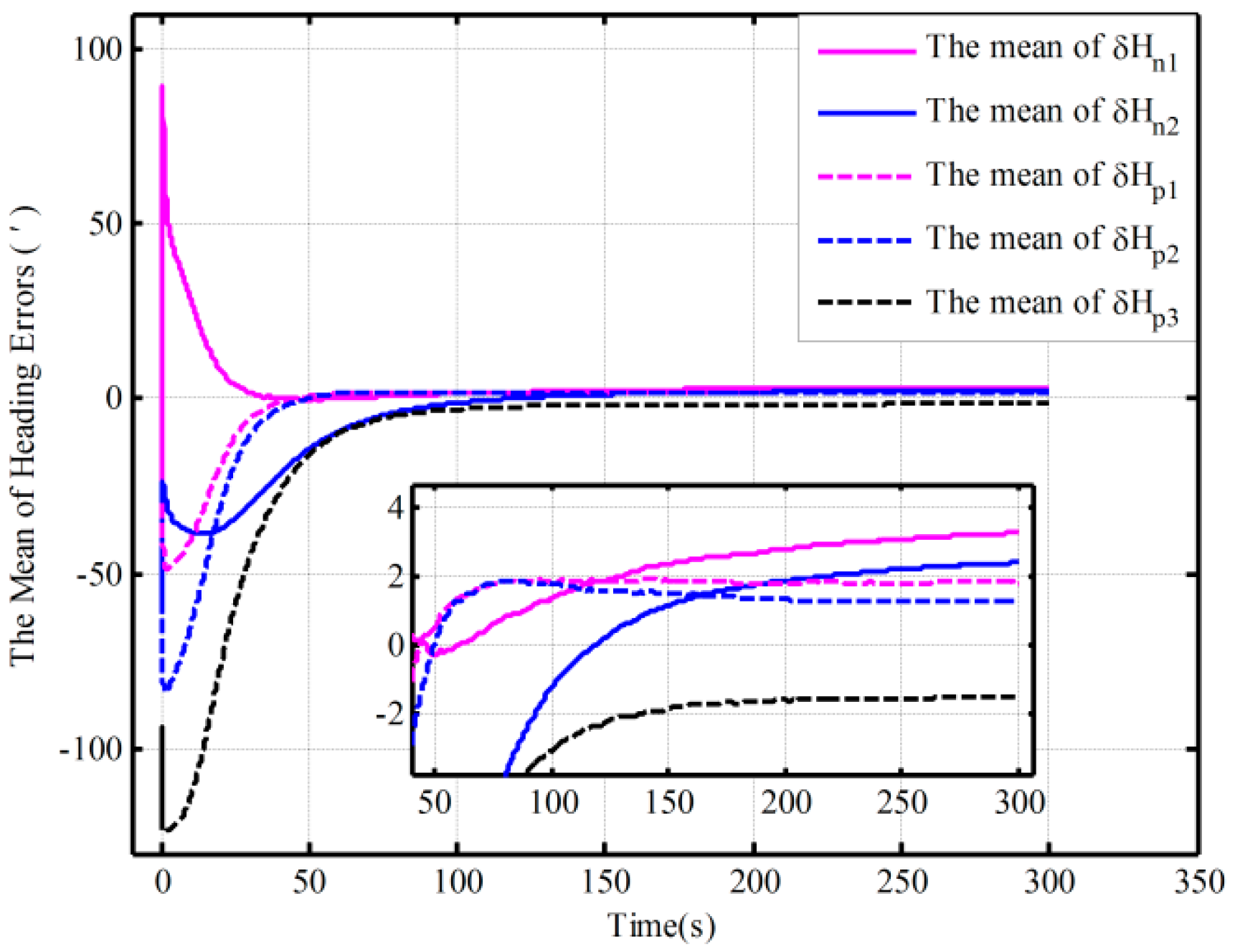
6.1.2. The Simulations Based on the Closed-Loop KF
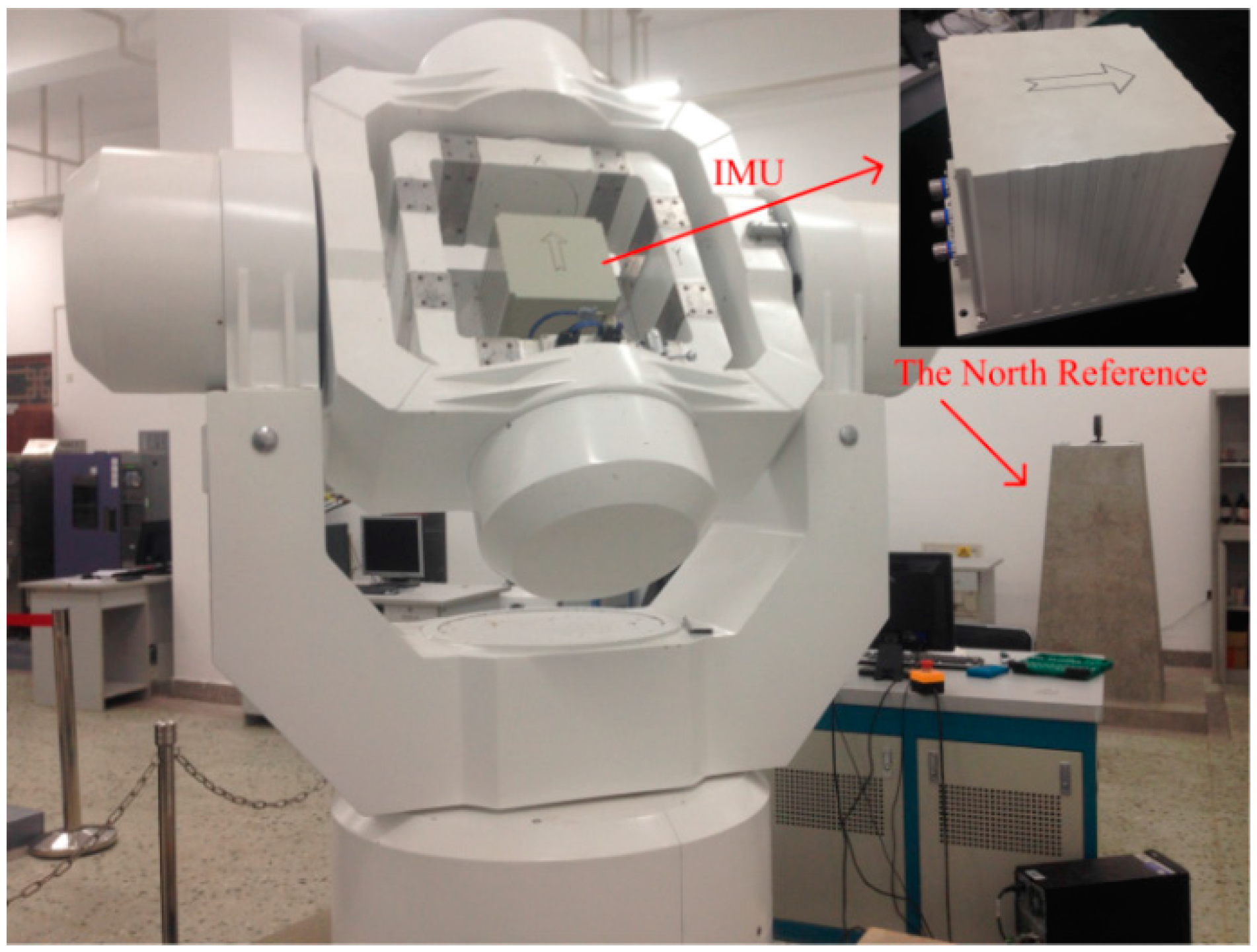
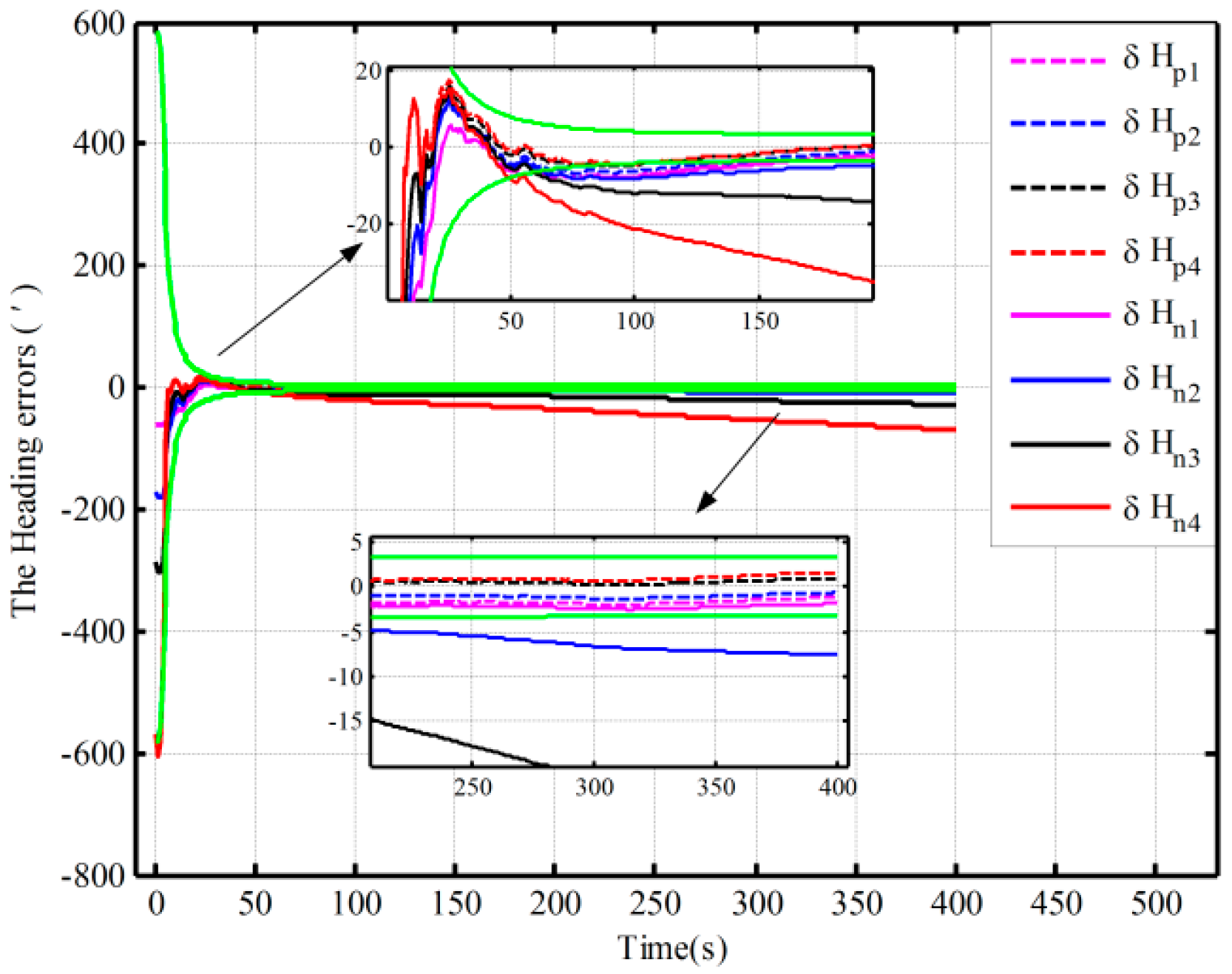
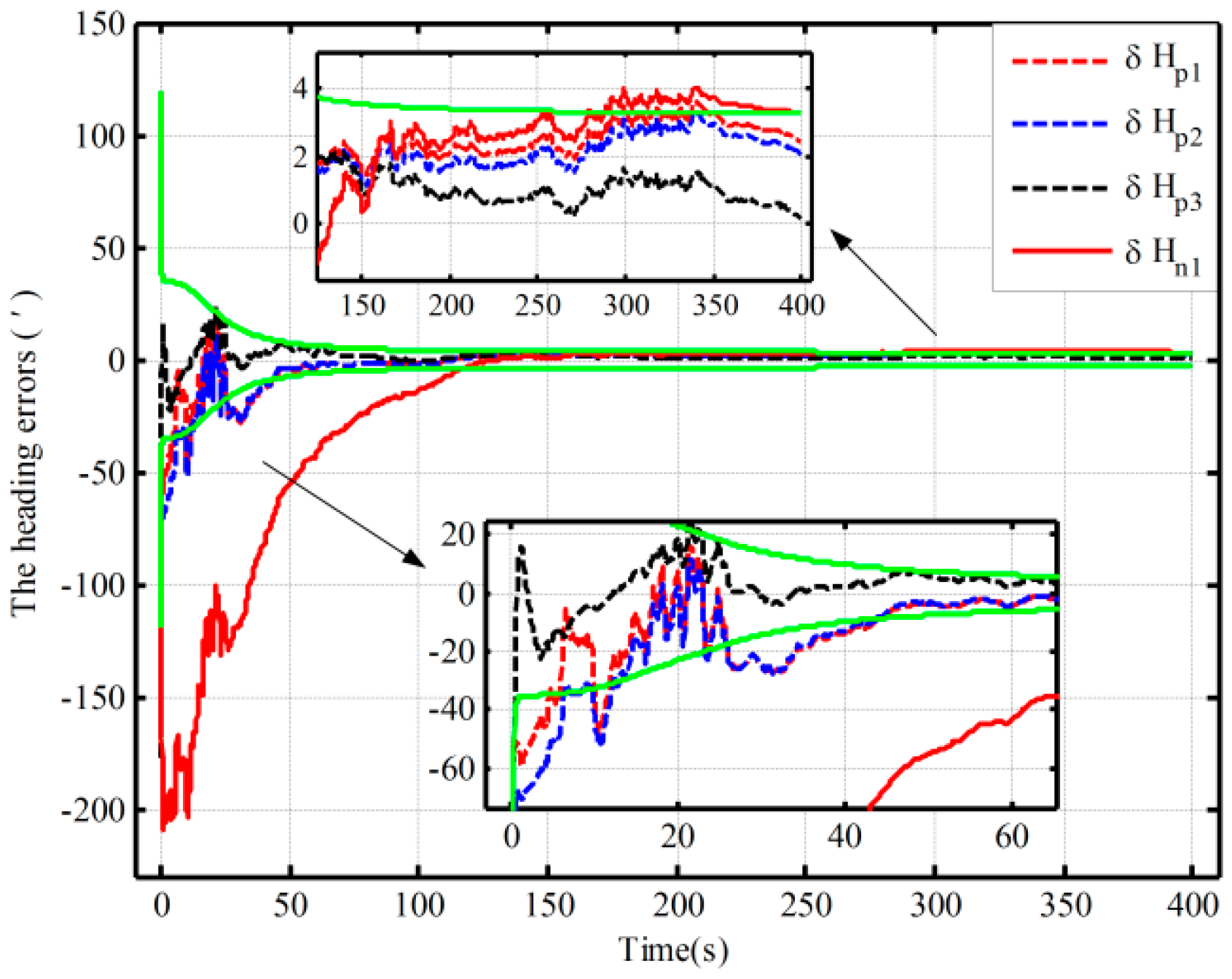
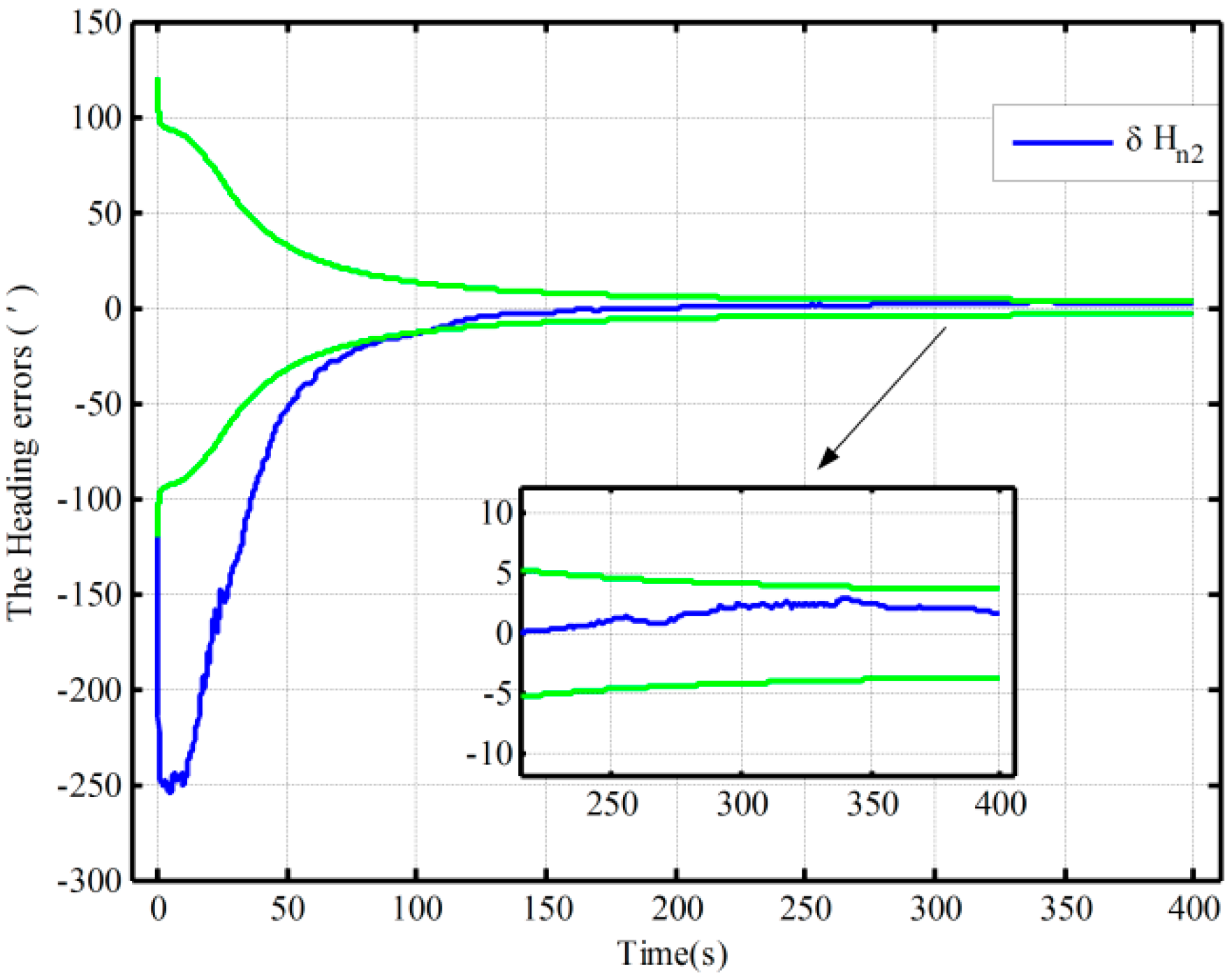
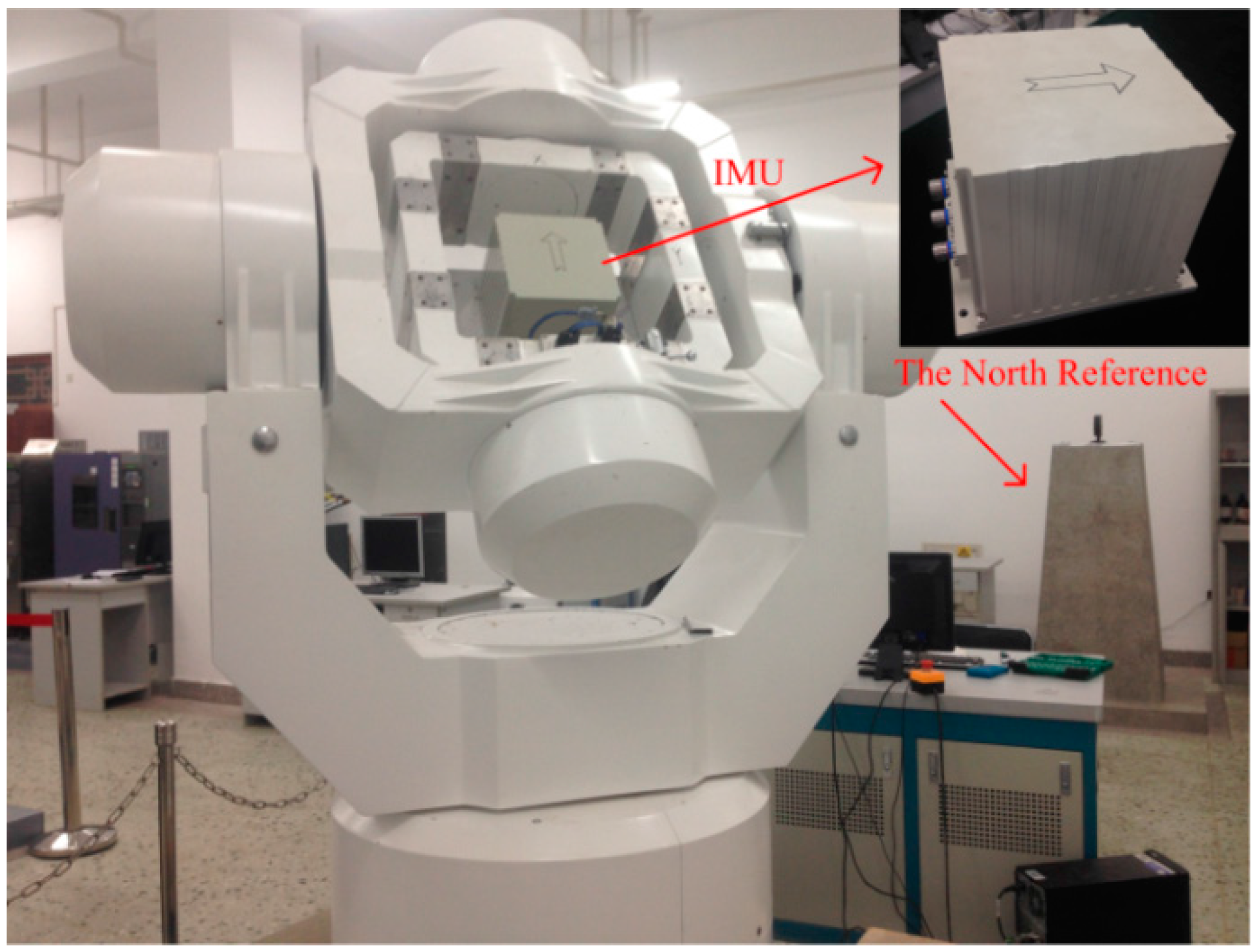
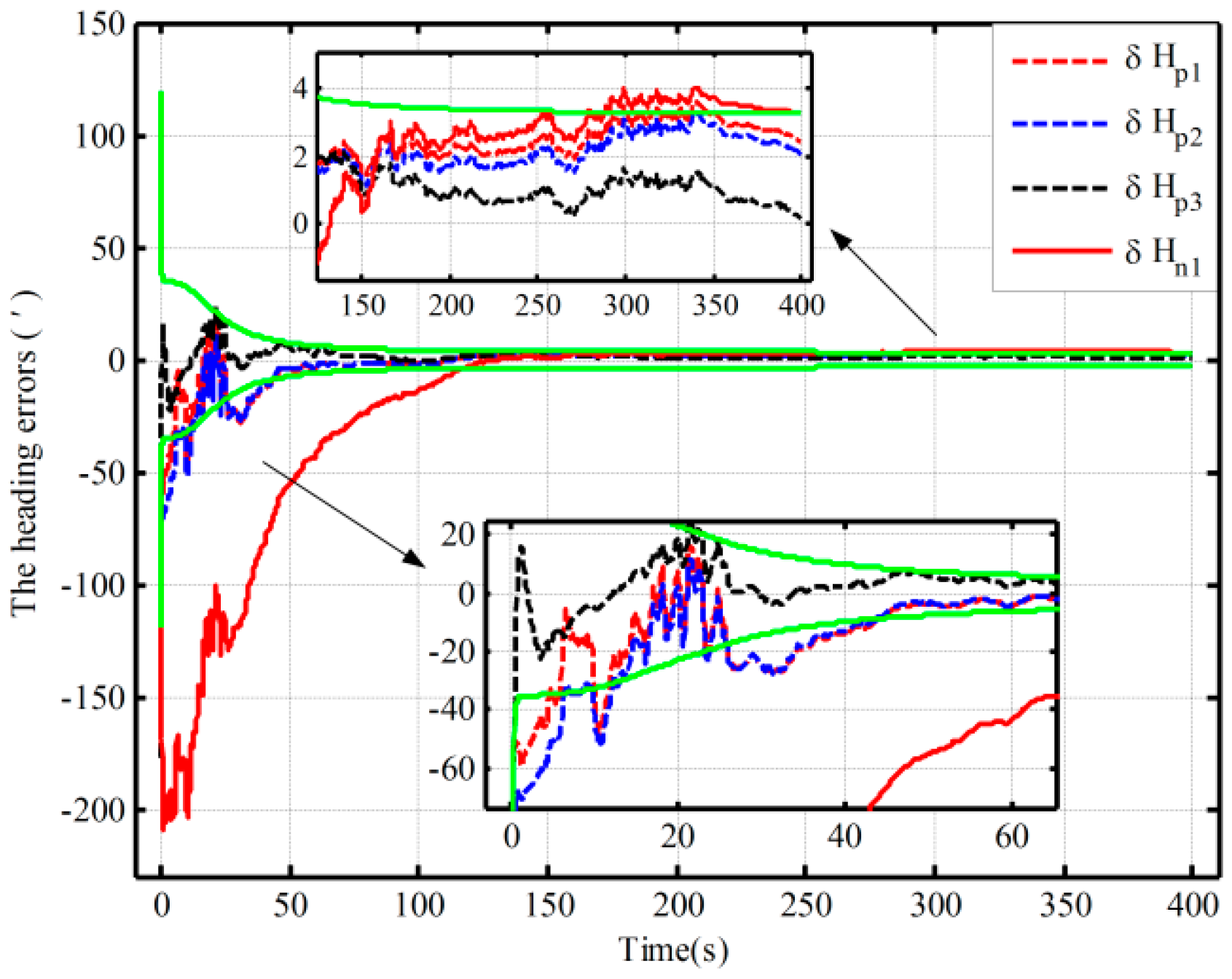
6.2. The Experiments of Fine Alignment Based on the KF
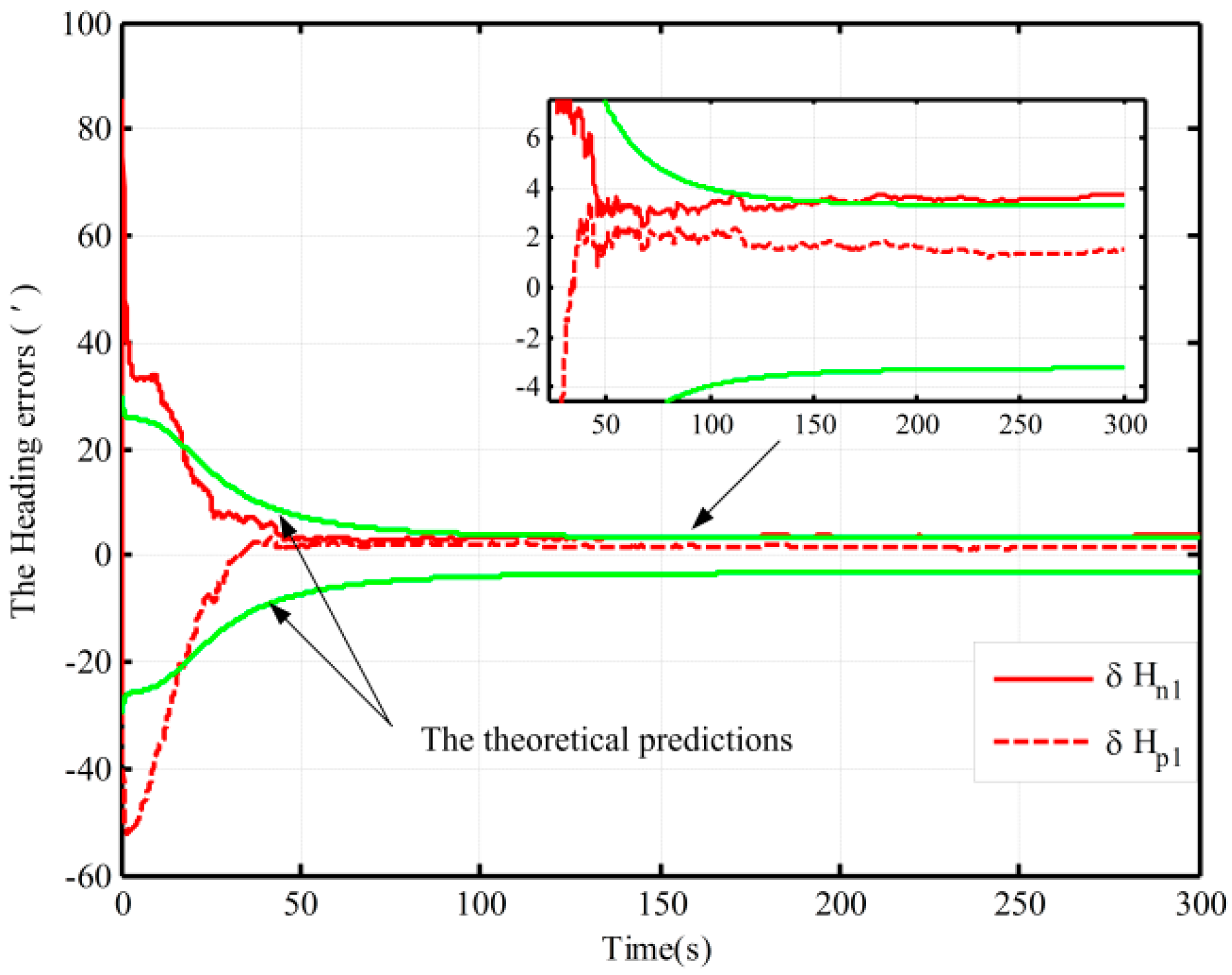
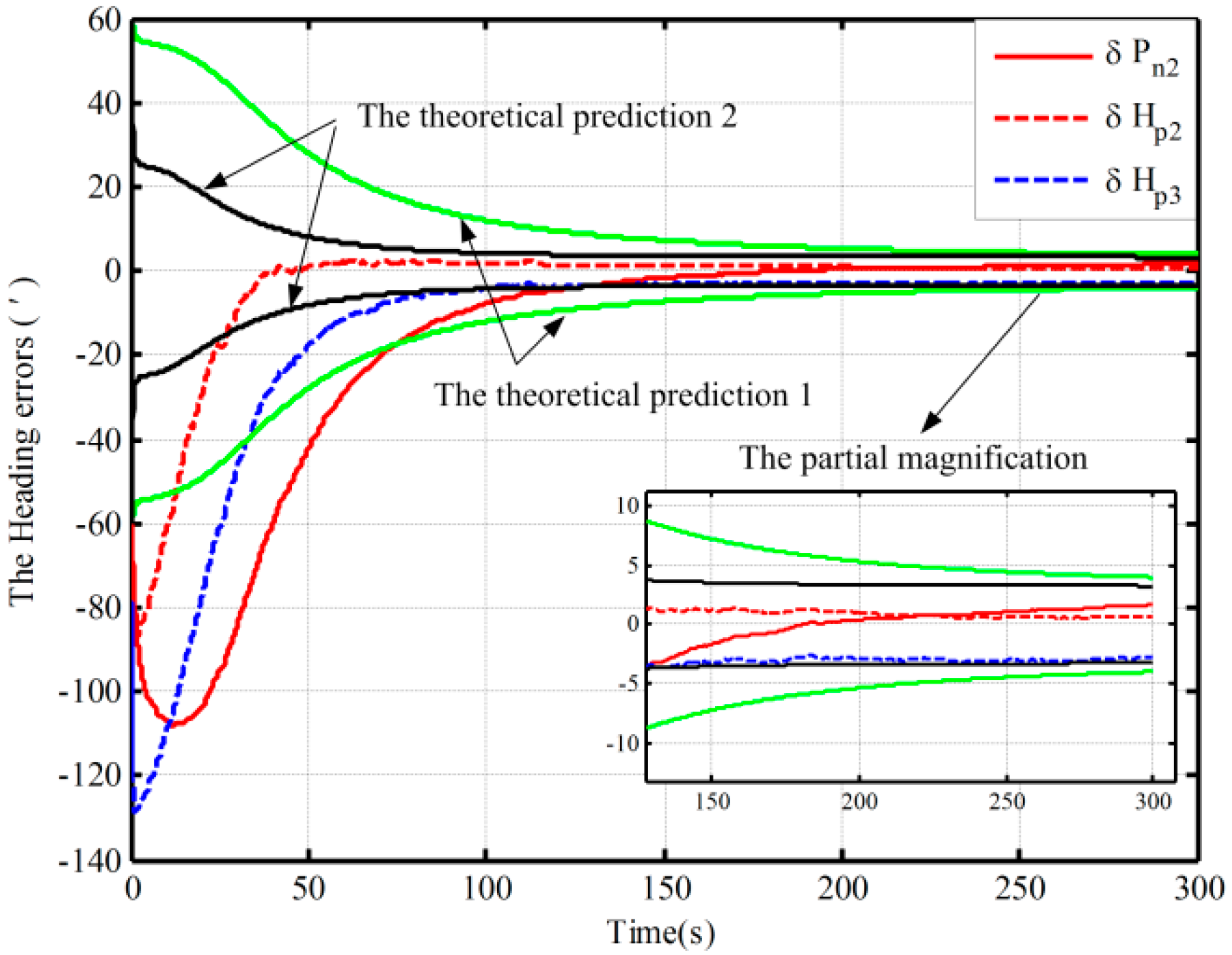
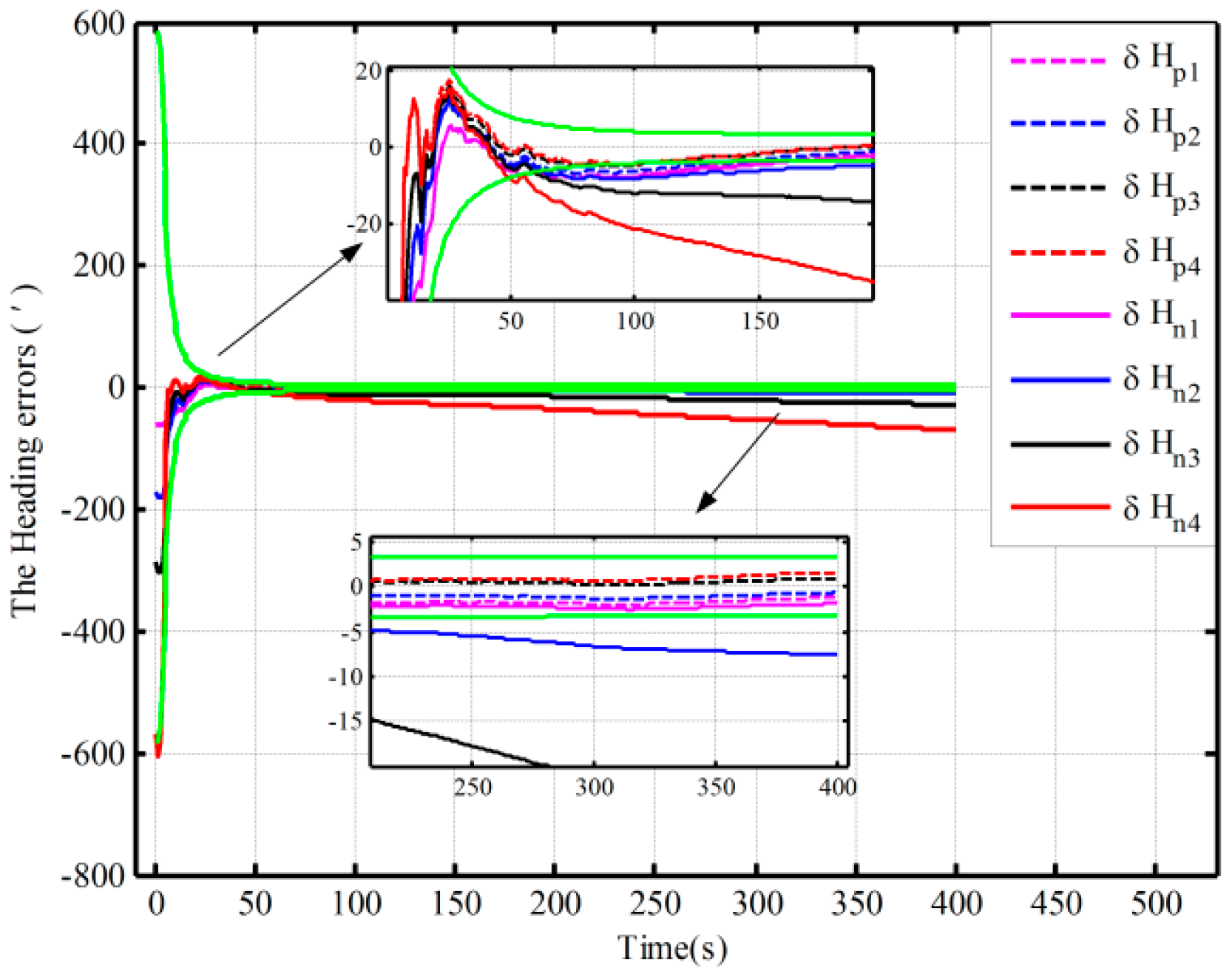
6.3. The Simulations of Polar Alignment
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhou, J.; Nie, X.; Lin, J. A novel laser Doppler velocimeter and its integrated navigation system with strapdown inertial navigation. Opt. Laser Technol. 2014, 64, 319–323. [Google Scholar] [CrossRef]
- Xu, F.; Fang, J. Velocity and position error compensation using strapdown inertial navigation system/celestial navigation system integration based on ensemble neural network. Aerosp. Sci. Technol. 2008, 12, 302–307. [Google Scholar] [CrossRef]
- Zhu, L.; Cheng, X. An Improved Initial Alignment Method for Rocket Navigation Systems. J. Navig. 2013, 66, 737–749. [Google Scholar] [CrossRef]
- Li, W.; Wu, W.; Wang, J. A fast SINS initial alignment scheme for underwater vehicle applications. J. Navig. 2013, 66, 181–198. [Google Scholar] [CrossRef]
- Cao, S.; Guo, L. Multi-objective robust initial alignment algorithm for Inertial Navigation System with multiple disturbances. Aerosp. Sci. Technol. 2012, 21, 1–6. [Google Scholar] [CrossRef]
- Li, J.; Xu, J.; Chang, L. An Improved Optimal Method for Initial Alignment. J. Navig. 2014, 67, 727–736. [Google Scholar] [CrossRef]
- Qi, N. Research on Initial Alignment of SINS for Marching Vehicle. In Proceedings of the IEEE Third International Conference on Instrumentation, Measurement, Computer, Communication and Control (IMCCC), Shenyang, China, 21–23 September 2013.
- Zhou, W.D.; Ma, H.; Ji, Y.R. Coarse Alignment for SINS Using Gravity in the Inertial Frame Based on Attitude Quaternion. Appl. Mech. Mater. 2013, 241, 413–417. [Google Scholar] [CrossRef]
- Ali, J.; Ushaq, M. A consistent and robust Kalman filter design for in-motion alignment of inertial navigation system. Measurement 2009, 42, 577–582. [Google Scholar] [CrossRef]
- Zhao, R.; Gu, Q. Nonlinear filtering algorithm with its application in INS alignment. In Proceedings of the Tenth IEEE Workshop on Statistical Signal and Array Processing, Pocono Manor, PA, USA, 14–16 August 2000.
- Li, W.; Wang, J.; Lu, L. A novel scheme for DVL-aided SINS in-motion alignment using UKF techniques. Sensors 2013, 13, 1046–1063. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Wang, J.; Gao, J. A Vondrak Low Pass Filter for IMU Sensor Initial Alignment on a Disturbed Base. Sensors 2014, 14, 23803–23821. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Xu, X.; Liu, Y. A Method for SINS Alignment with Large Initial Misalignment Angles Based on Kalman Filter with Parameters Resetting. Math. Probl. Eng. 2014, 2014, 346291. [Google Scholar] [CrossRef]
- Kelley, R.T.; Bedoya, C. Design, development and evaluation of an Ada coded INS/GPS open loop Kalman filter. In Proceedings of the IEEE Aerospace and Electronics Conference, Dayton, OH, USA, 21–25 May 1990.
- Silva, F.O.; Hemerly, E.M.; Waldemar Filho, C.L. Influence of latitude in coarse self-alignment of strapdown inertial navigation systems. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 1219–1226.
- Lü, S.; Xie, L.; Chen, J. New techniques for initial alignment of strapdown inertial navigation system. J. Frankl. Inst. 2009, 346, 1021–1037. [Google Scholar] [CrossRef]
- Wang, L.D.; Zhao, Y.; Zhang, N. An improved adaptive algorithm for INS/GPS system. Appl. Mech. Mater. 2013, 397, 1606–1610. [Google Scholar] [CrossRef]
- Youlong, W. Characteristics of Communication and Navigation on Cross-Polar Routes. Eng. Technol. 2006, 1, 46–48. [Google Scholar]
- Wu, F.; Qin, Y.Y.; Zhou, Q. Airborne weapon transfer alignment algorithm in polar region. J. Chin. Inert. Technol. 2013, 2, 3. [Google Scholar]
- Li, Q.; Ben, Y.; Yu, F. System reset of transversal strap down INS for ship in polar region. Measurement 2015, 60, 247–257. [Google Scholar] [CrossRef]
- Zhang, H.M. The Technology of Undersea Navigation and Position; Wuhan University, Inc.: Wuhan, China, 2010. [Google Scholar]
- Anderson, E.W.I. Navigation in Polar Regions. J. Navig. 1957, 10, 156–161. [Google Scholar] [CrossRef]
- Qin, Y.Y. Inertial Navigation; Science, Inc.: Beijing, China, 2006. [Google Scholar]
- Titterton, D.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; IET, Inc.: Chicago, IL, USA, 2004. [Google Scholar]
- Pham, T.M. Kalman filter mechanization for INS airstart. In Proceedings of the IEEE/AIAA 10th Digital Avionics Systems Conference, Los Angeles, CA, USA, 14–17 October 1991.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Coarse Alignment Accuracy | Errors | ||
|---|---|---|---|
| Pitch | Roll | Heading | |
| Case 1 | 0.3° | 0.3° | 1° |
| Case 2 | 1° | 1° | 3° |
| Case 3 | 2° | 2° | 5° |
| Case 4 | 3° | 3° | 10° |
| The Coarse Alignment Accuracy | Errors | ||
|---|---|---|---|
| Pitch | Roll | Heading | |
| Case 1 | 0.2° | 0.2° | 0.5° |
| Case 2 | 0.3° | 0.3° | 1° |
| Case 3 | 0.5° | 0.5° | 2° |
| Conditions | The Proposed Algorithm | The Traditional Algorithm | ||
|---|---|---|---|---|
| Mean | Variance | Mean | Variance | |
| Case 1 | 1.57′ | 5 × 10−4 | 1.76′ | 6.25 × 10−4 |
| Case2 | 1.74′ | 6.6 × 10−4 | 3.59′ | 2.6 × 10−3 |
| Case3 | 2.53′ | 1.28 × 10−3 | 15.9′ | 1.28 × 10−5 |
| Case4 | 1.82′ | 7.26 × 10−4 | 28.32′ | 8.35 × 10−3 |
| Conditions | The Proposed Algorithm | The Traditional Algorithm | The Larger Noise Matrix Algorithm | |||
|---|---|---|---|---|---|---|
| Mean | Variance | Mean | Variance | Mean | Variance | |
| Case 1 | 1.81′ | 5 × 10−5 | 2.80′ | 8.93 × 10−4 | − | − |
| Case 2 | 1.33′ | 1 × 10−4 | × | × | 1.87′ | 4.2 × 10−4 |
| Case 3 | −1.62′ | 1 × 10−3 | × | × | − | − |
| The Coarse Alignment Accuracy | Errors | ||
|---|---|---|---|
| Pitch | Roll | Heading | |
| Case 1 | 0.3° | 0.3° | 1° |
| Case 2 | 0.5° | 0.5° | 2° |
| Case 3 | 1° | 1° | 3° |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Gao, Y.; Li, G.; Guang, X.; Li, S. An Improved Alignment Method for the Strapdown Inertial Navigation System (SINS). Sensors 2016, 16, 621. https://doi.org/10.3390/s16050621
Liu M, Gao Y, Li G, Guang X, Li S. An Improved Alignment Method for the Strapdown Inertial Navigation System (SINS). Sensors. 2016; 16(5):621. https://doi.org/10.3390/s16050621
Chicago/Turabian StyleLiu, Meng, Yanbin Gao, Guangchun Li, Xingxing Guang, and Shutong Li. 2016. "An Improved Alignment Method for the Strapdown Inertial Navigation System (SINS)" Sensors 16, no. 5: 621. https://doi.org/10.3390/s16050621
APA StyleLiu, M., Gao, Y., Li, G., Guang, X., & Li, S. (2016). An Improved Alignment Method for the Strapdown Inertial Navigation System (SINS). Sensors, 16(5), 621. https://doi.org/10.3390/s16050621