
Fault Detection and Diagnosis of Railway Point Machines by Sound Analysis


Abstract
:1. Introduction
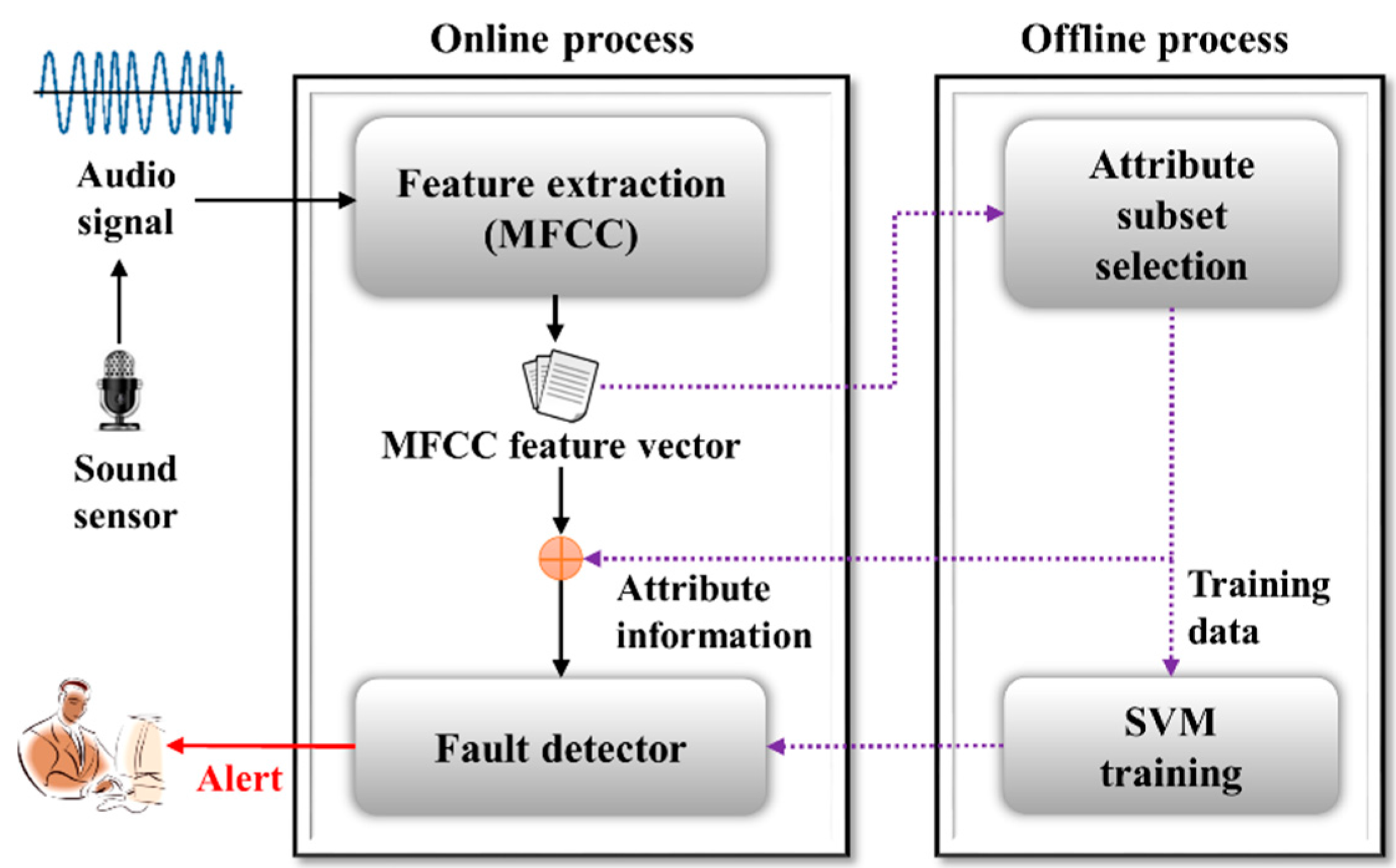
2. Fault Detection and Diagnosis of Railway Point Machines by Audio Analysis
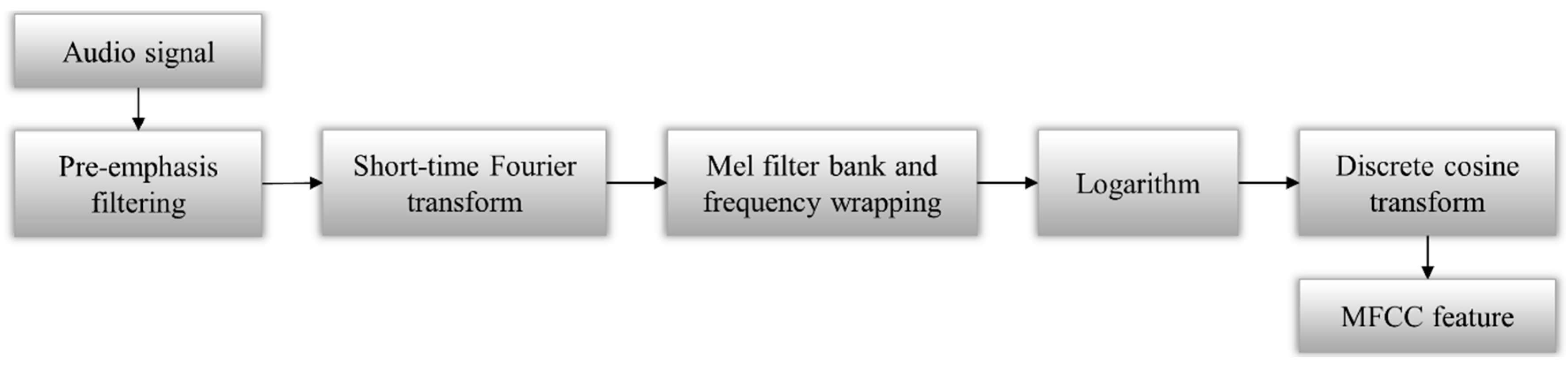
2.1. Mel-frequency Cepstrum Coefficients
2.2. Correlation-Based Feature Selection
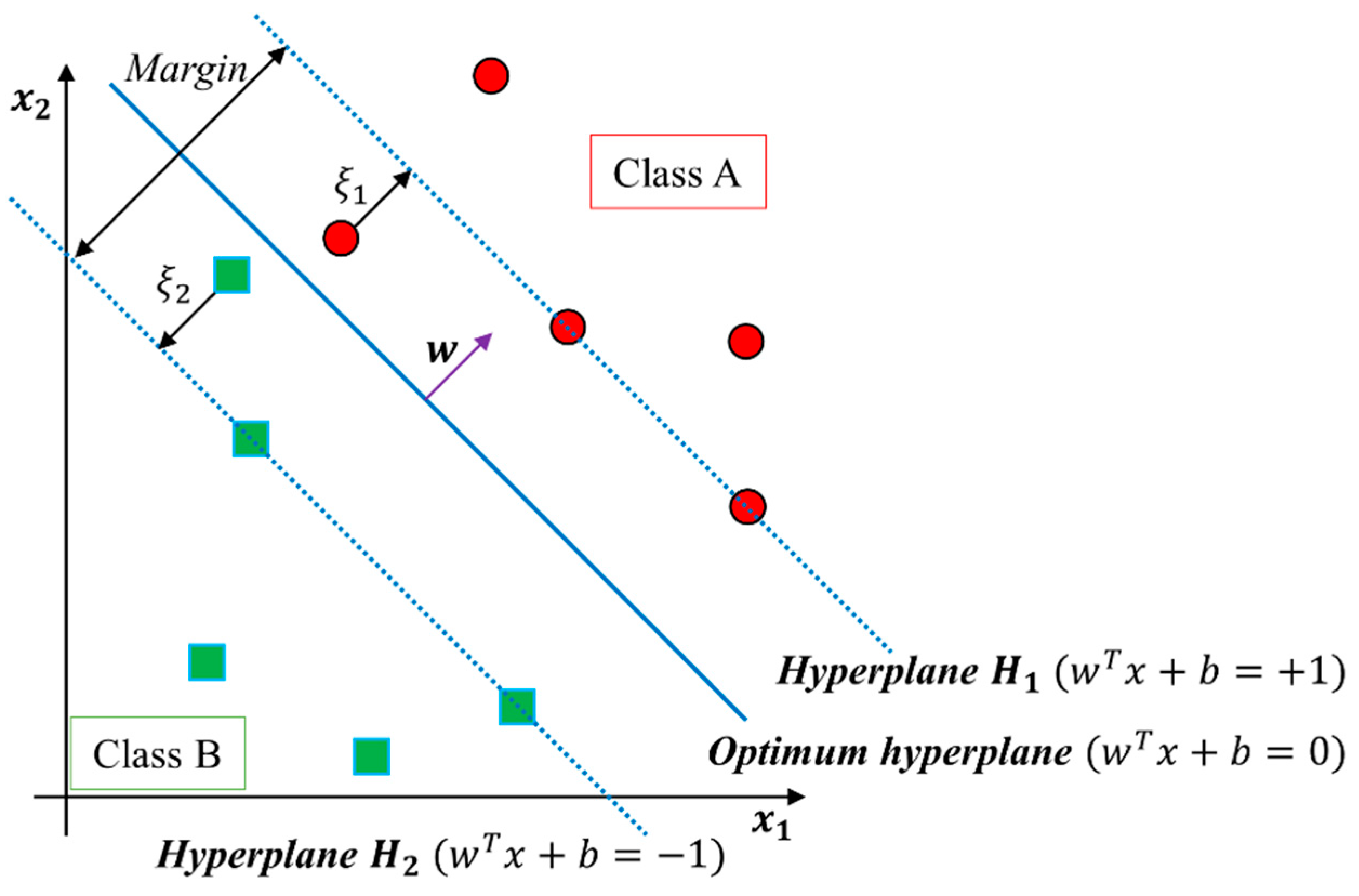
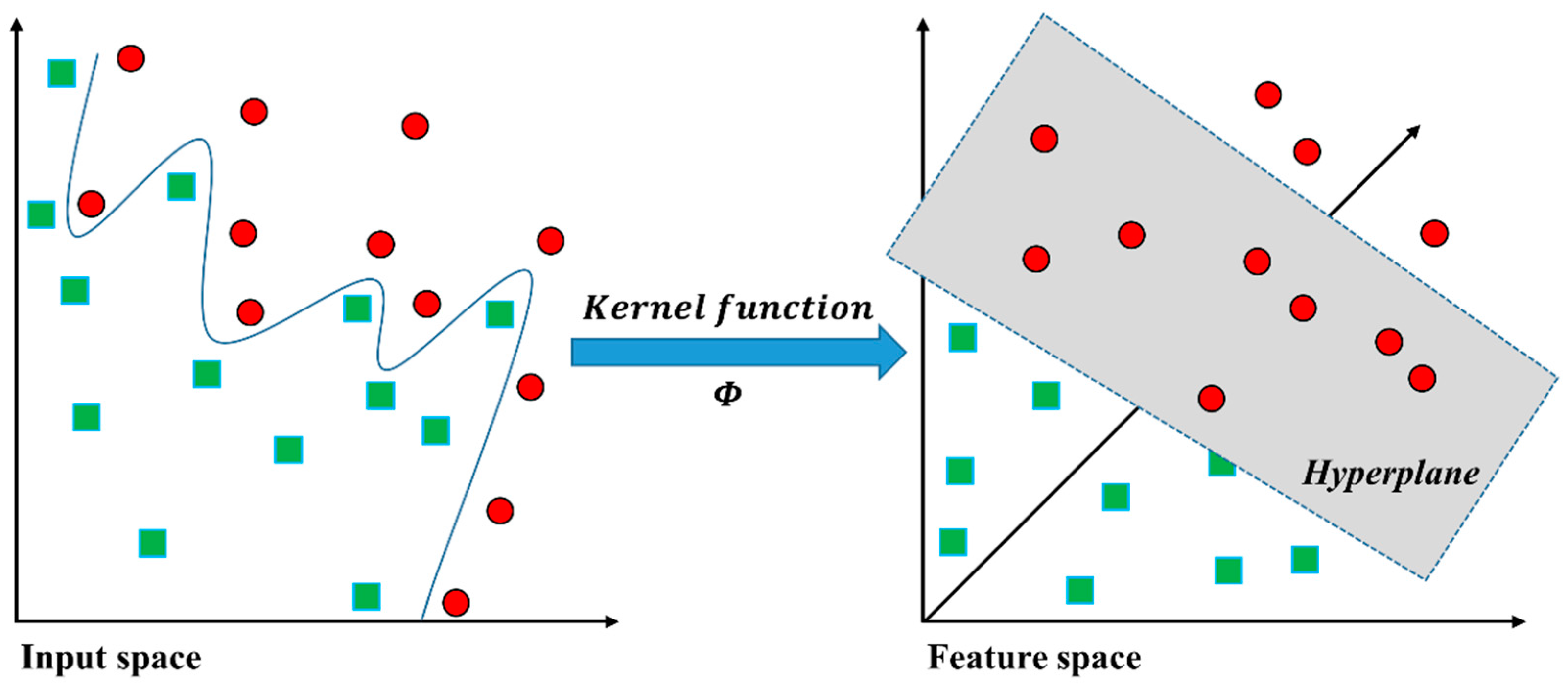
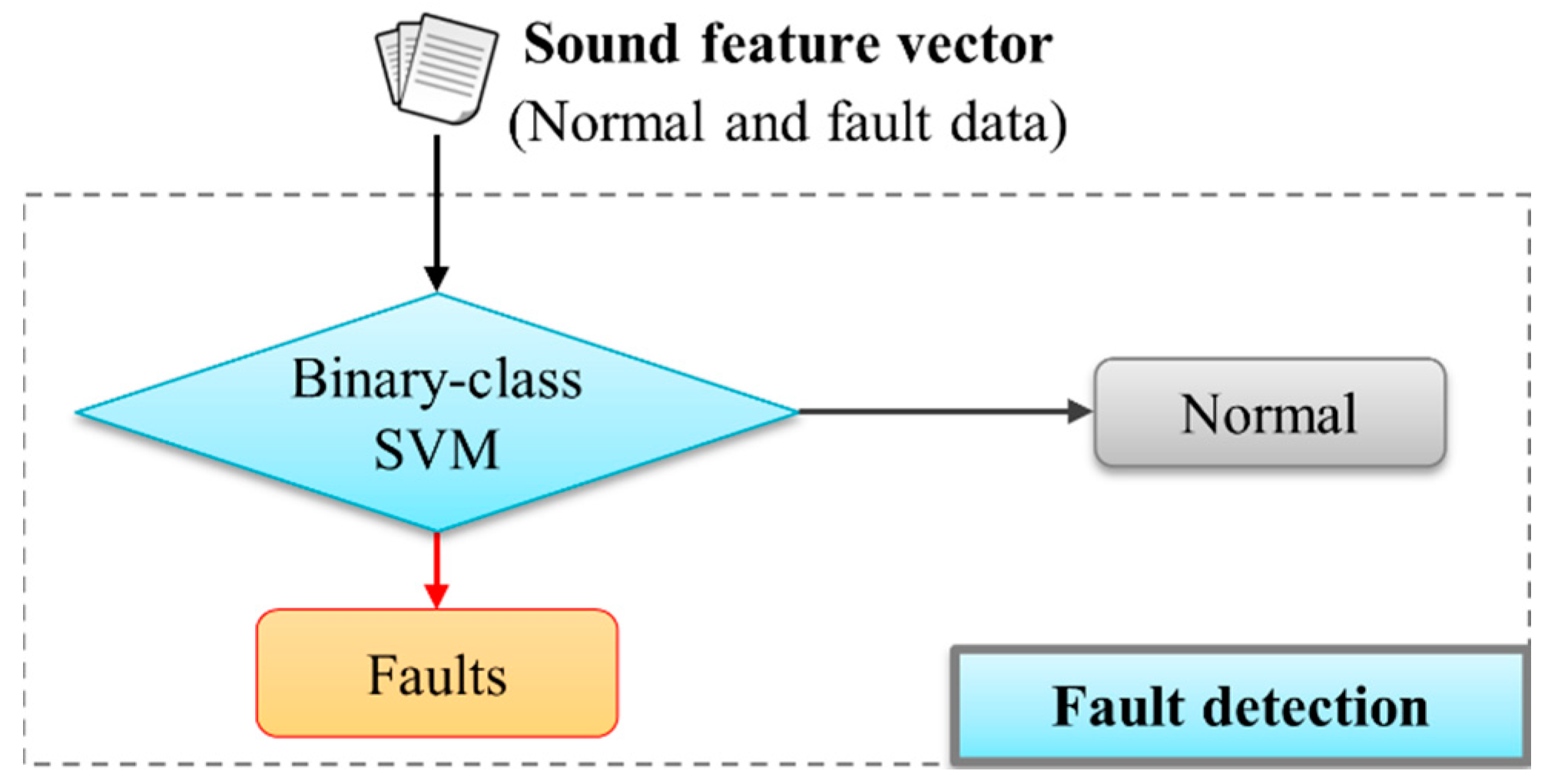
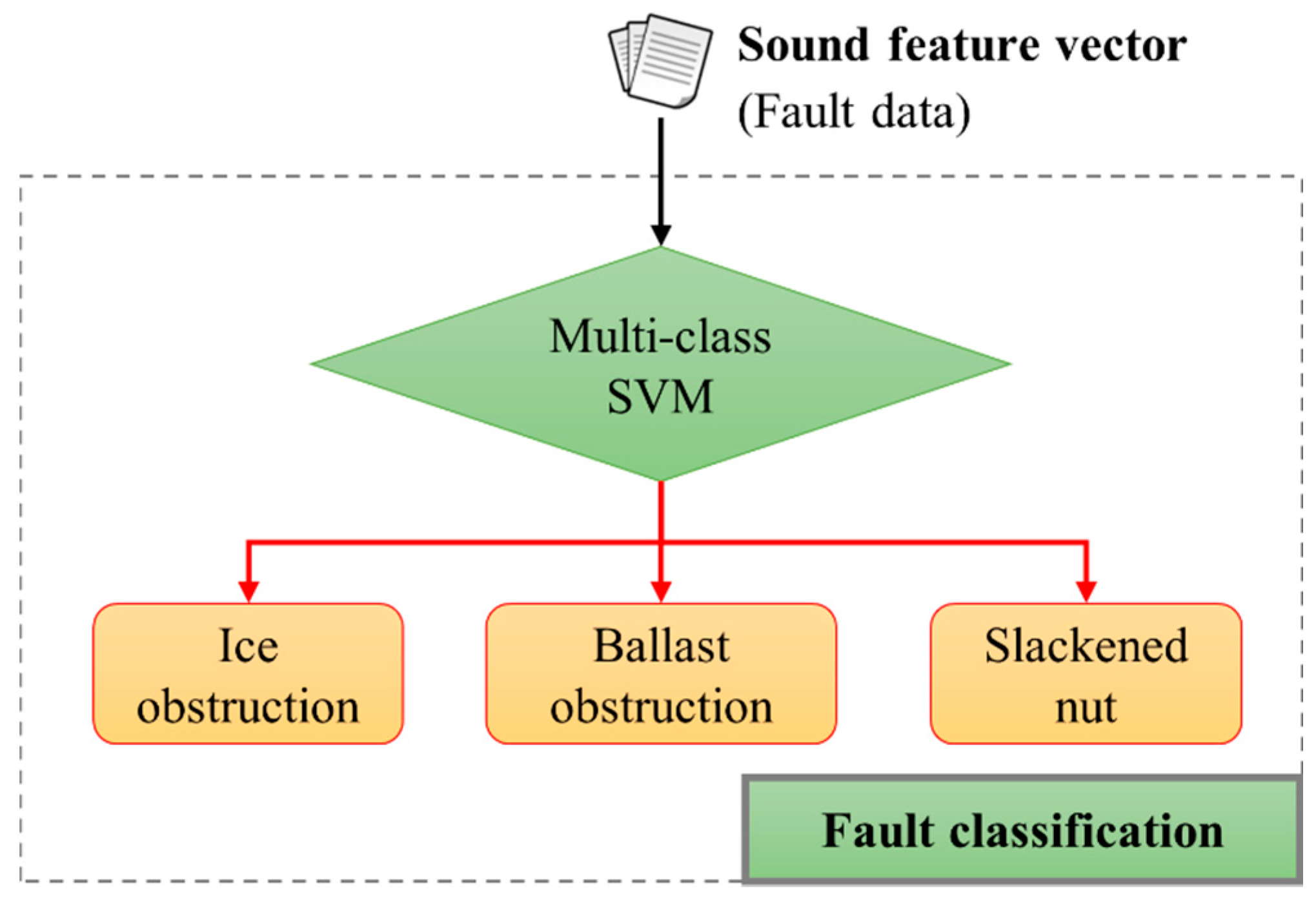
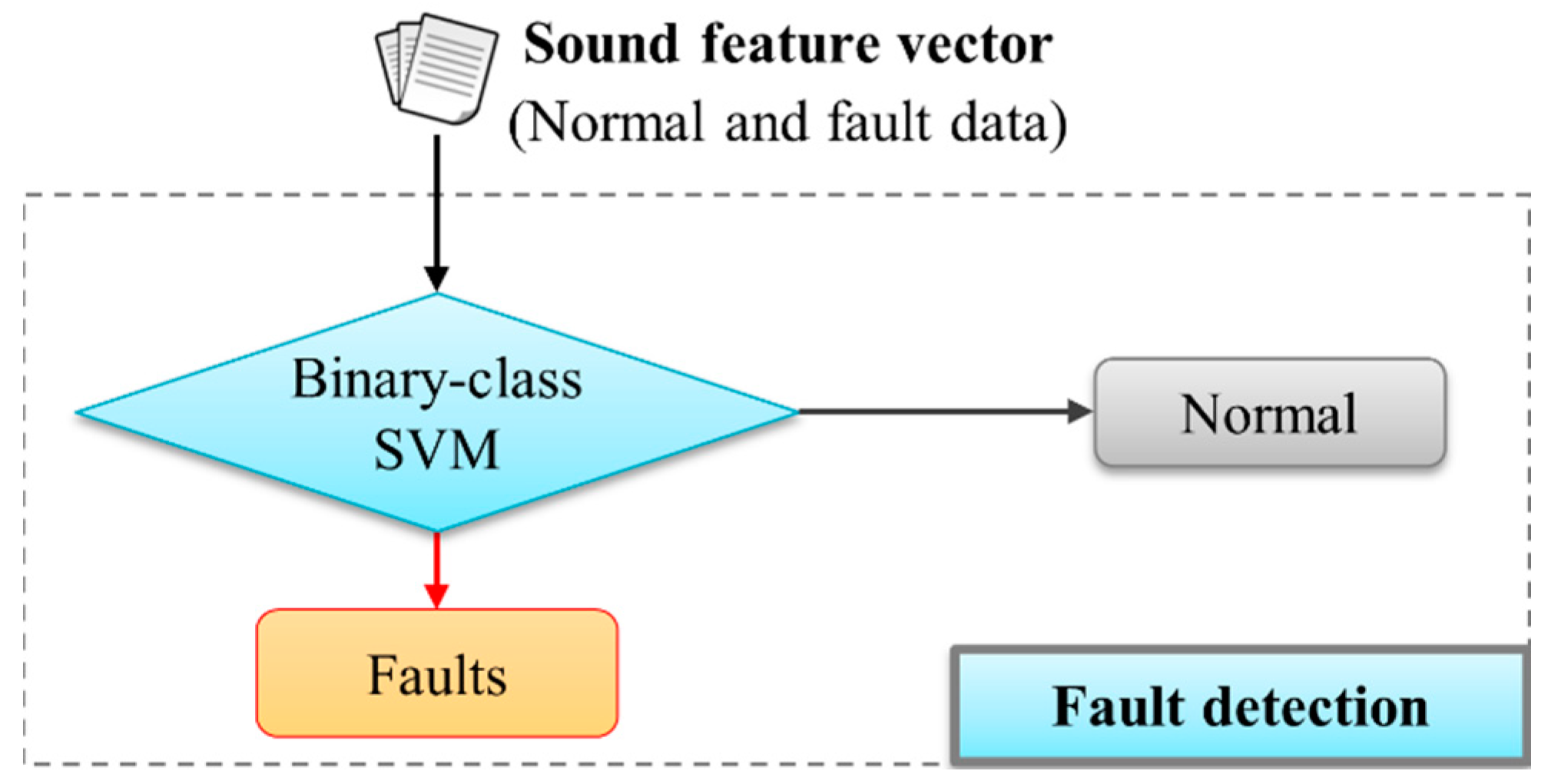
2.3. Support Vector Machine
3. Results
3.1. Data Collection
3.2. Fault Sound Detection and Classification Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Asada, T.; Roberts, C.; Koseki, T. An algorithm for improved performance of railway condition monitoring equipment: Alternating-current point machine case study. Transp. Res. C Emerg. Technol. 2013, 30, 81–92. [Google Scholar]
- Vileiniskis, M.; Remenyte-Prescott, R.; Rama, D. A fault detection method for railway point systems. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit 2015. [Google Scholar] [CrossRef]
- Ardakani, H.D.; Lucas, C.; Siegel, D.; Chang, S.; Dersin, P.; Bonnet, B.; Lee, J. PHM for railway system—A case study on the health assessment of the point machines. In Proceedings of the 2012 IEEE Conference on Prognostics and Health Management (PHM), Denver, CO, USA, 18–21 June 2012; pp. 1–5.
- Bolbolamiri, N.; Sanai, M.S.; Mirabadi, A. Time-domain stator current condition monitoring: Analyzing point failures detection by Kolmogorov-Smirnov (K-S) test. Int. J. Electr. Comput. Energ. Electron. Commun. Eng. 2012, 6, 587–592. [Google Scholar]
- Silmon, J.; Roberts, C. Improving railway switch system reliability with innovative condition monitoring algorithms. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit 2010, 224, 293–302. [Google Scholar] [CrossRef]
- Asada, T.; Roberts, C. Development of an effective condition monitoring system for AC point machines. In Proceedings of the 5th IET Conference on Railway Condition Monitoring and Non-Destructive Testing (RCM 2011), Derby, UK, 29–30 November 2011; pp. 1–6.
- Asada, T.; Roberts, C. Improving the dependability of DC point machines with a novel condition monitoring system. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit 2013, 227, 322–332. [Google Scholar] [CrossRef]
- Cristianini, N.; Shawe-Taylor, J. An Introduction to Support Vector Machines and Other Kernel-Based Learning Methods; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Lee, J.; Noh, B.; Jang, S.; Park, D.; Chung, Y.; Chang, H. Stress detection and classification of laying hens by sound analysis. Asian Australas. J. Anim. Sci. 2015, 28, 592–598. [Google Scholar] [CrossRef] [PubMed]
- Santos, P.; Villa, L.F.; Reñones, A.; Bustillo, A.; Maudes, J. An SVM-based solution for fault detection in wind turbines. Sensors 2015, 15, 5627–5648. [Google Scholar] [CrossRef] [PubMed]
- Eker, O.; Camci, F.; Kumar, U. SVM-based diagnostics on railway turnouts. Int. J. Perform. Eng. 2012, 8, 289–398. [Google Scholar]
- Shanthi, T.S.; Lingam, C. Review of feature extraction techniques in automatic speech recognition. Int. J. Sci. Eng. Technol. 2013, 2, 479–484. [Google Scholar]
- Shen, P.; Changjun, Z.; Chen, X. Automatic speech emotion recognition using support vector machine. In Proceedings of the International Conference on Electronic & Mechanical Engineering and Information Technology, Harbin, China, 12–14 August 2011; pp. 621–625.
- Wang, K.C. Time-frequency feature representation using multi-resolution texture analysis and acoustic activity detector for real-life speech emotion recognition. Sensors 2015, 15, 1458–1478. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.-H.; Huang, W.-T.; Tan, T.-H.; Chang, C.-C.; Chang, Y.-J. Using k-nearest neighbor classification to diagnose abnormal lung sounds. Sensors 2015, 15, 13132–13158. [Google Scholar] [CrossRef] [PubMed]
- Chung, Y.; Oh, S.; Lee, J.; Park, D.; Chang, H.; Kim, S. Automatic detection and recognition of pig wasting diseases using sound data in audio surveillance systems. Sensors 2013, 13, 12929–12942. [Google Scholar] [CrossRef] [PubMed]
- Ligges, U.; Preusser, A.; Thieler, A.; Weihs, C. R Package “tuneR” Computer Program. Available online: http://www.inside-r.org/packages/cran/tuneR/docs/melfcc (accessed on 14 April 2016).
- Hall, M. Correlation-Based Feature Selection for Machine Learning. Ph.D. Thesis, Waikato University, Hamilton, New Zealand, April 1999. [Google Scholar]
- Chung, Y.; Lee, J.; Oh, S.; Park, D.; Chang, H.; Kim, S. Automatic detection of cow’s oestrus in audio surveillance system. Asian Australas. J. Anim. Sci. 2013, 26, 1030–1037. [Google Scholar] [CrossRef] [PubMed]
- Hall, M.A.; Smith, L.A. Feature selection for machine learning: Comparing a correlation-based filter approach to the wrapper. In Proceedings of the 12th International Conference on Florida Artificial Intelligence Research Society, Orlando, FL, USA, 1–5 May 1999; pp. 235–239.
- Kaya, H.; Ozkaptan, T.; Salah, A.A.; Gurgen, S.F. Canonical correlation analysis and local fisher discriminant analysis based multi-view acoustic feature reduction for physical load prediction. In Proceedings of the 15th Annual Conference of the International Speech Communication Association, Singapore, 14–18 September 2014; pp. 442–446.
- Singh, V.; Meena, N. Engine fault diagnosis using DTW, MFCC and FFT. In Proceedings of the First International Conference on Intelligent Human Computer Interaction, Allahabad, India, 20–23 January 2009; pp. 83–94.
- Nelwamondo, F.V.; Marwala, T.; Mahola, U. Early classifications of bearing faults using hidden Markov models, Gaussian mixture models, mel-frequency cepstral coefficients and fractals. Int. J. Innov. Comput. Inf. Control 2006, 2, 1281–1299. [Google Scholar]
- Maniak, T.; Jayne, C.; Iqbal, R.; Doctor, F. Automated intelligent system for sound signalling device quality assurance. Inf. Sci. 2015, 294, 600–611. [Google Scholar] [CrossRef]
- Kavzoglu, T.; Colkesen, I. A kernel functions analysis for support vector machines for land cover classification. Int. J. Appl. Earth Obs. Geoinf. 2009, 11, 352–359. [Google Scholar] [CrossRef]
- Renukadevi, N.T.; Thangaraj, P. Performance evaluation of SVM–RBF kernel for medical image classification. Glob. J. Comput. Sci. Technol. 2013, 13, 15–19. [Google Scholar]
- Boersma, P.; Weenink, D. Praat: Doing Phonetics by Computer; Version 6.0.05; Computer Program; University of Amsterdam: Amsterdam, The Netherland, 2015. [Google Scholar]
- Hall, M.; Frank, E.; Holmes, G.; Pfahringer, B.; Reutemann, P.; Witten, I. The WEKA data mining software: An update. SIGKDD Explor. 2009, 11, 10–18. [Google Scholar] [CrossRef]
- Han, J.; Kamber, M.; Pei, J. Data Mining: Concepts and Techniques, 3rd ed.; Morgan Kaufman: San Francisco, CA, USA, 2012. [Google Scholar]
- Theodoridis, S.; Koutroumbas, K. Pattern Recognition, 4th ed.; Academic Press: Kidlington, Oxford, UK, 2009. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CFS (133 Features Used) | All Features (720 Used) | ||||
|---|---|---|---|---|---|
| FDR | FPR | FNR | FDR | FPR | FNR |
| 94.3% | 2.7% | 5.6% | 94.1% | 0.6% | 5.9% |
| Faults | CFS(133 Features Used) | All Features (720 Used) | ||
|---|---|---|---|---|
| Precision | Recall | Precision | Recall | |
| Ice obstruction | 90.8% | 88.1% | 94.2% | 97.3% |
| Ballast obstruction | 91.1% | 91.1% | 97.2% | 93.7% |
| Slackened nut | 97.4% | 99.9% | 99.7% | 100% |
| Average | 93.1% | 93.0% | 97.0% V | 97.0% V |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Choi, H.; Park, D.; Chung, Y.; Kim, H.-Y.; Yoon, S. Fault Detection and Diagnosis of Railway Point Machines by Sound Analysis. Sensors 2016, 16, 549. https://doi.org/10.3390/s16040549
Lee J, Choi H, Park D, Chung Y, Kim H-Y, Yoon S. Fault Detection and Diagnosis of Railway Point Machines by Sound Analysis. Sensors. 2016; 16(4):549. https://doi.org/10.3390/s16040549
Chicago/Turabian StyleLee, Jonguk, Heesu Choi, Daihee Park, Yongwha Chung, Hee-Young Kim, and Sukhan Yoon. 2016. "Fault Detection and Diagnosis of Railway Point Machines by Sound Analysis" Sensors 16, no. 4: 549. https://doi.org/10.3390/s16040549