
Robot Guidance Using Machine Vision Techniques in Industrial Environments: A Comparative Review

 and
and
Abstract
:1. Introduction
2. Fundamentals of 3D Reconstruction
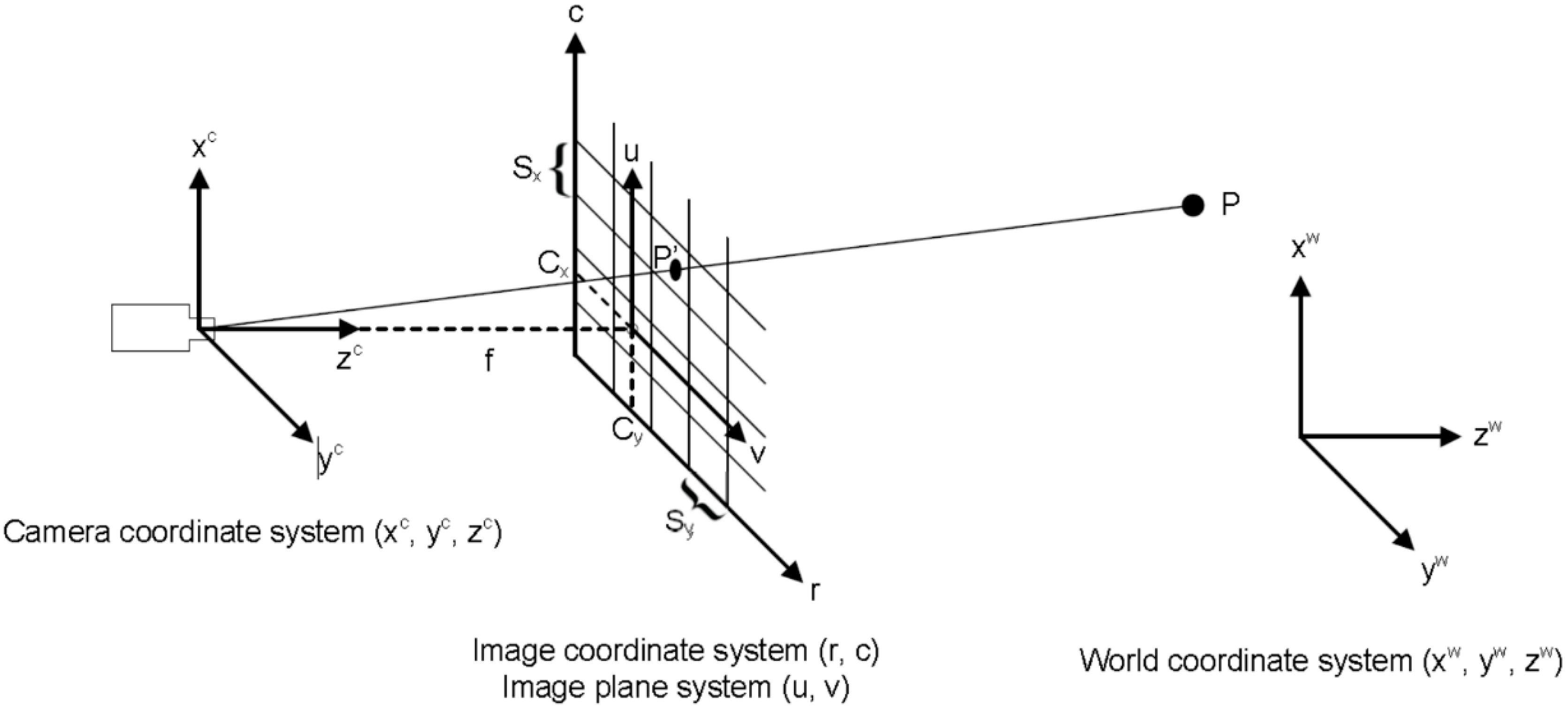
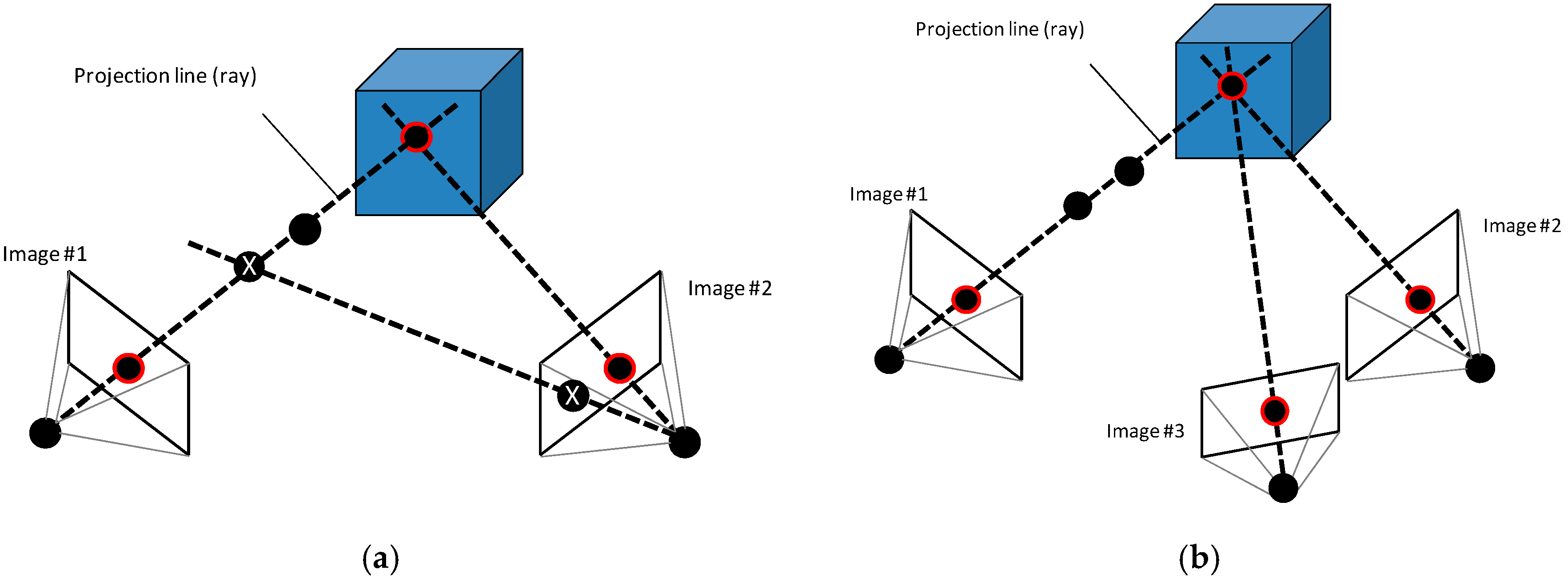
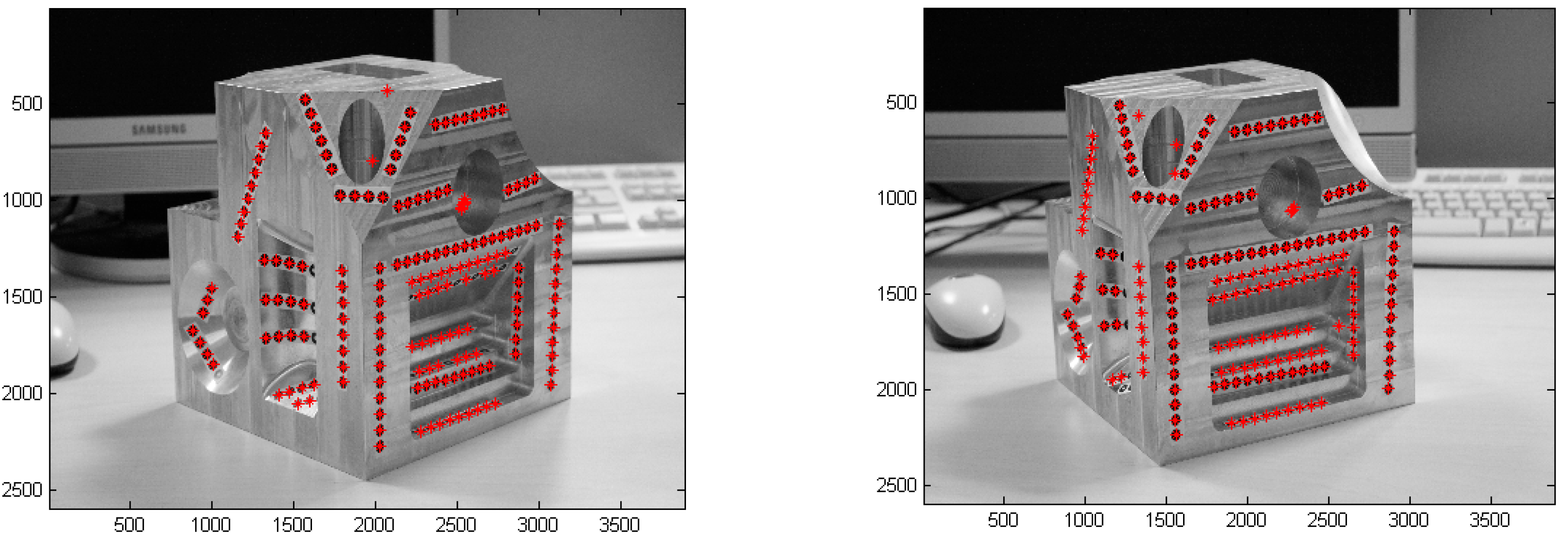
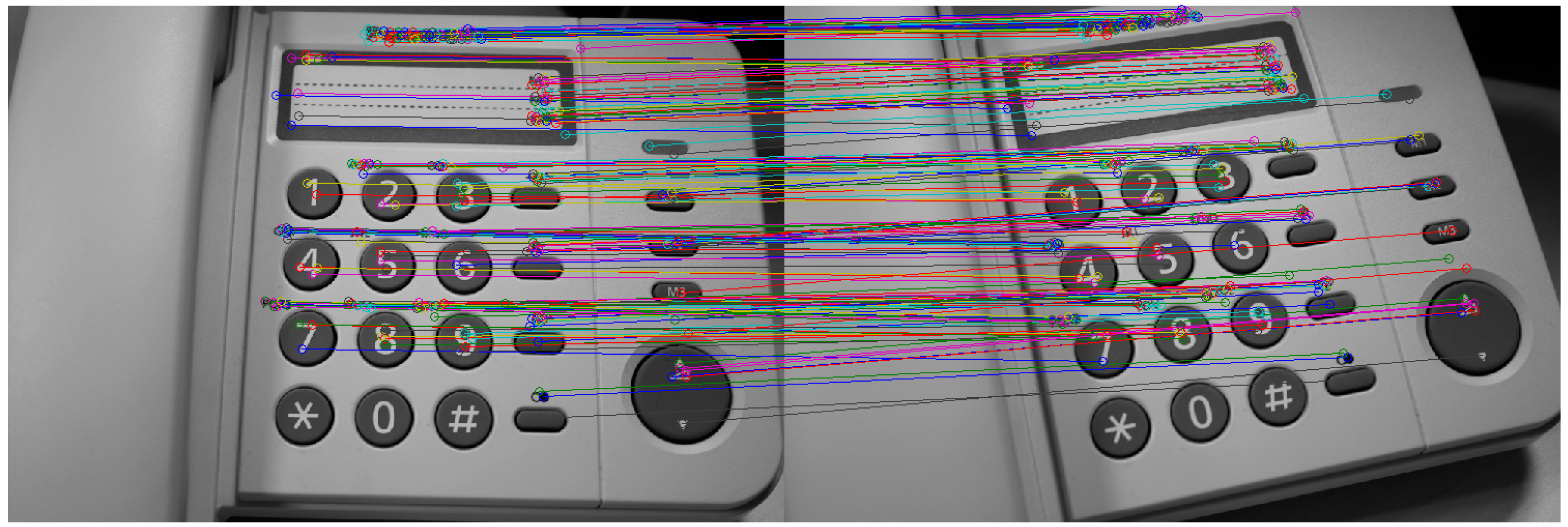
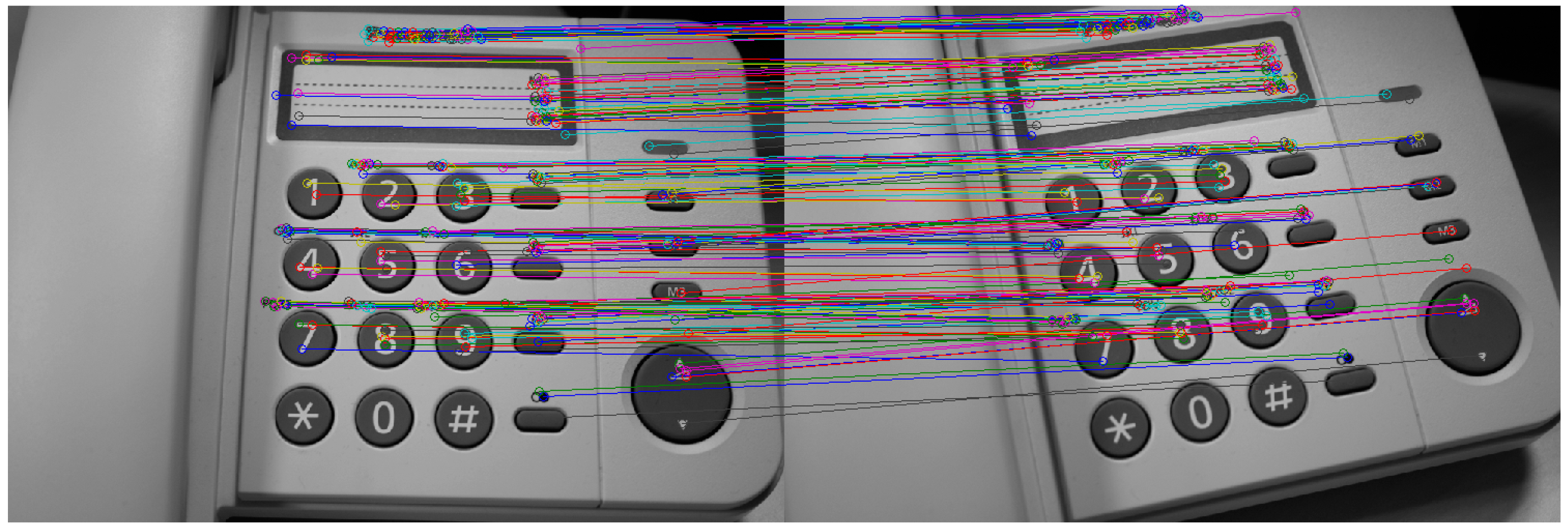
2.1. Stereo Vision and Photogrammetry
2.2. Time of Flight
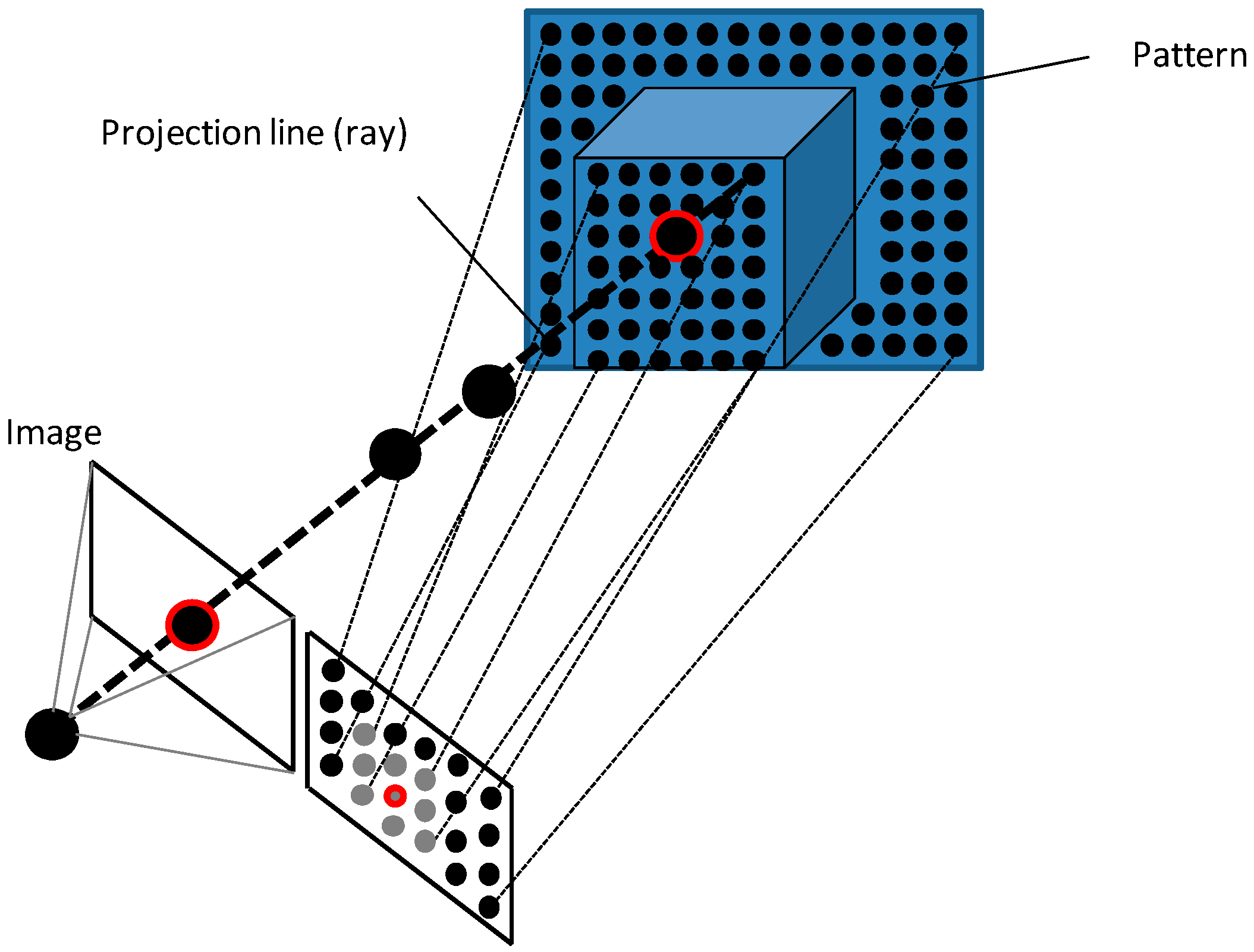
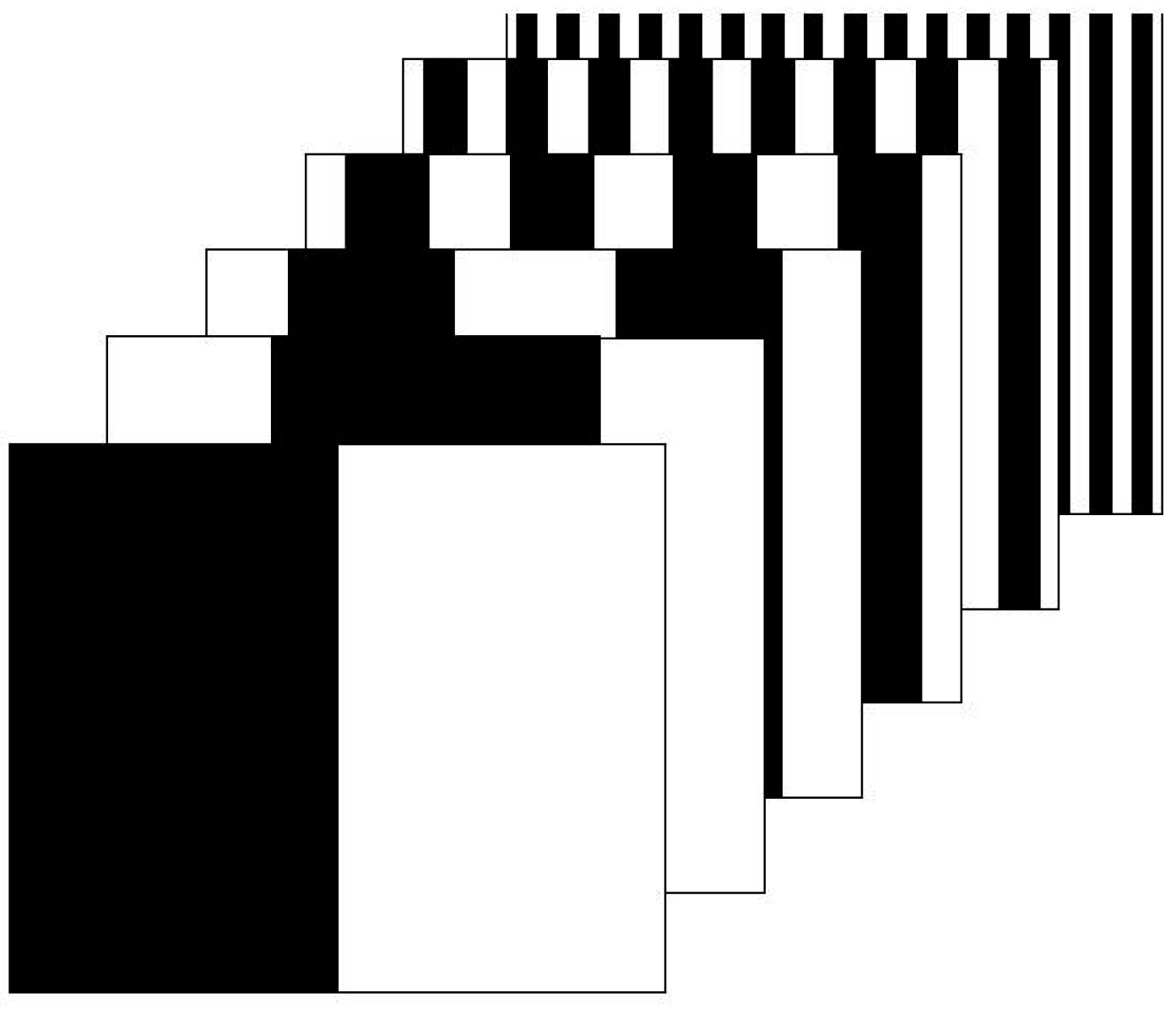
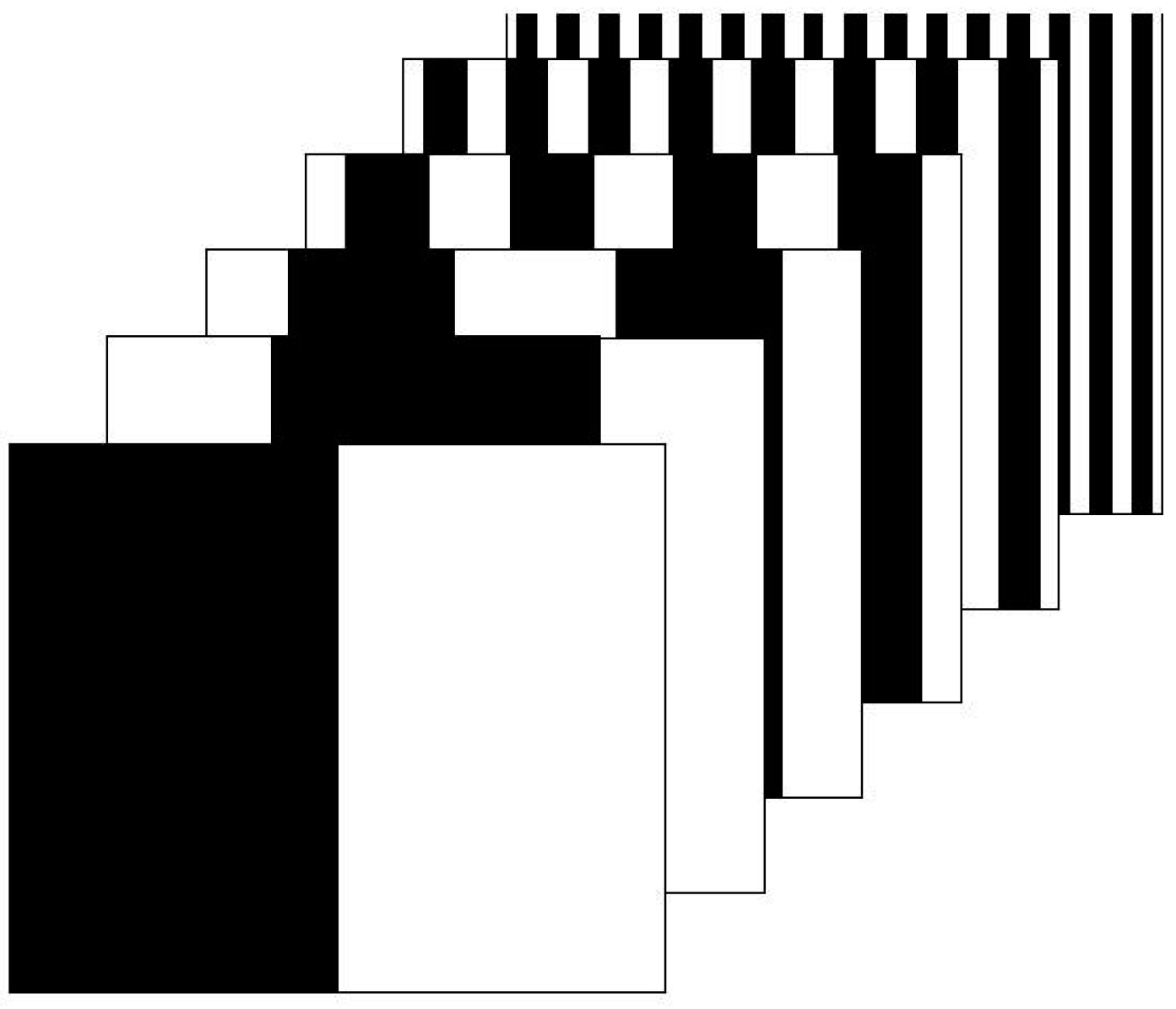
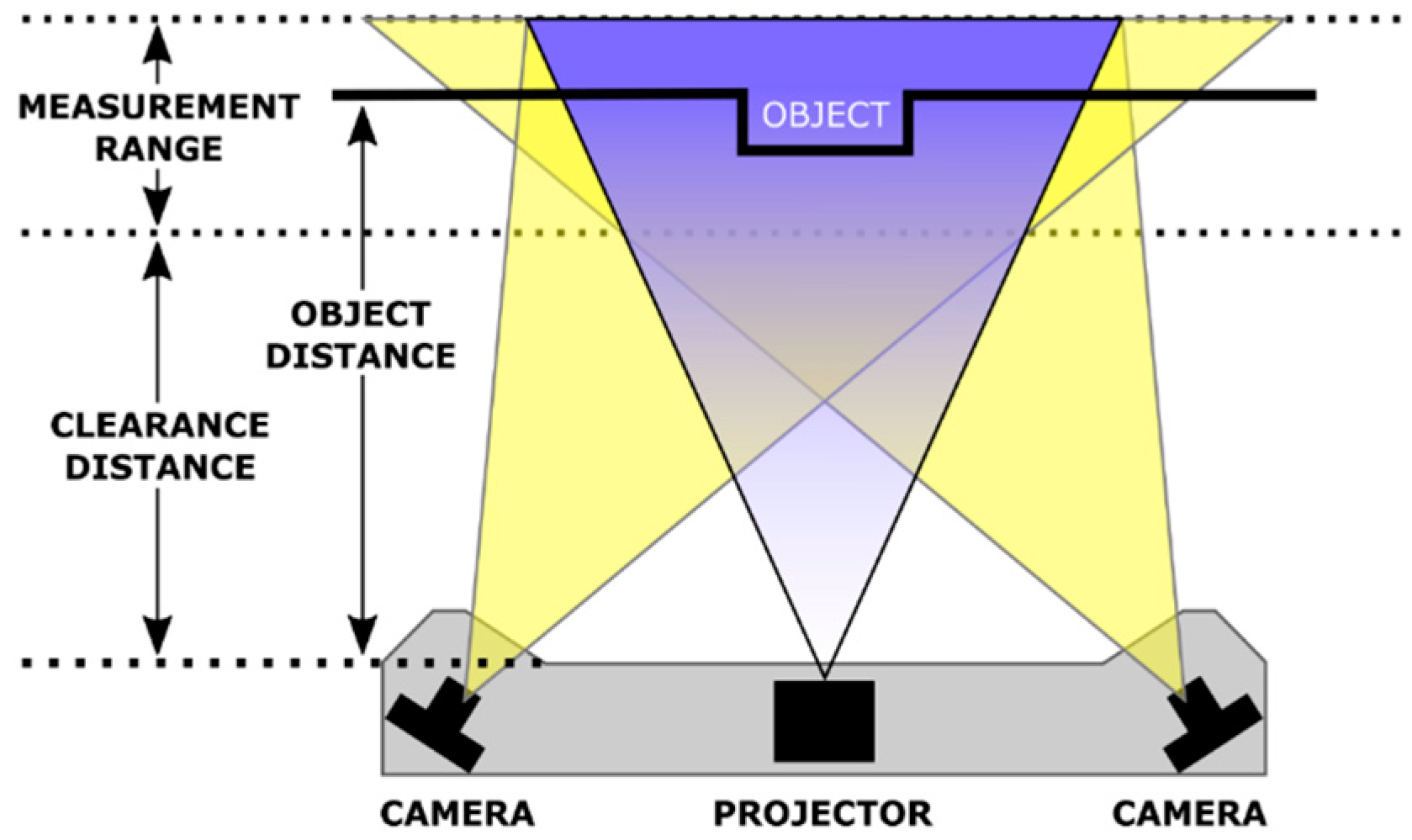
2.3. Structured Light
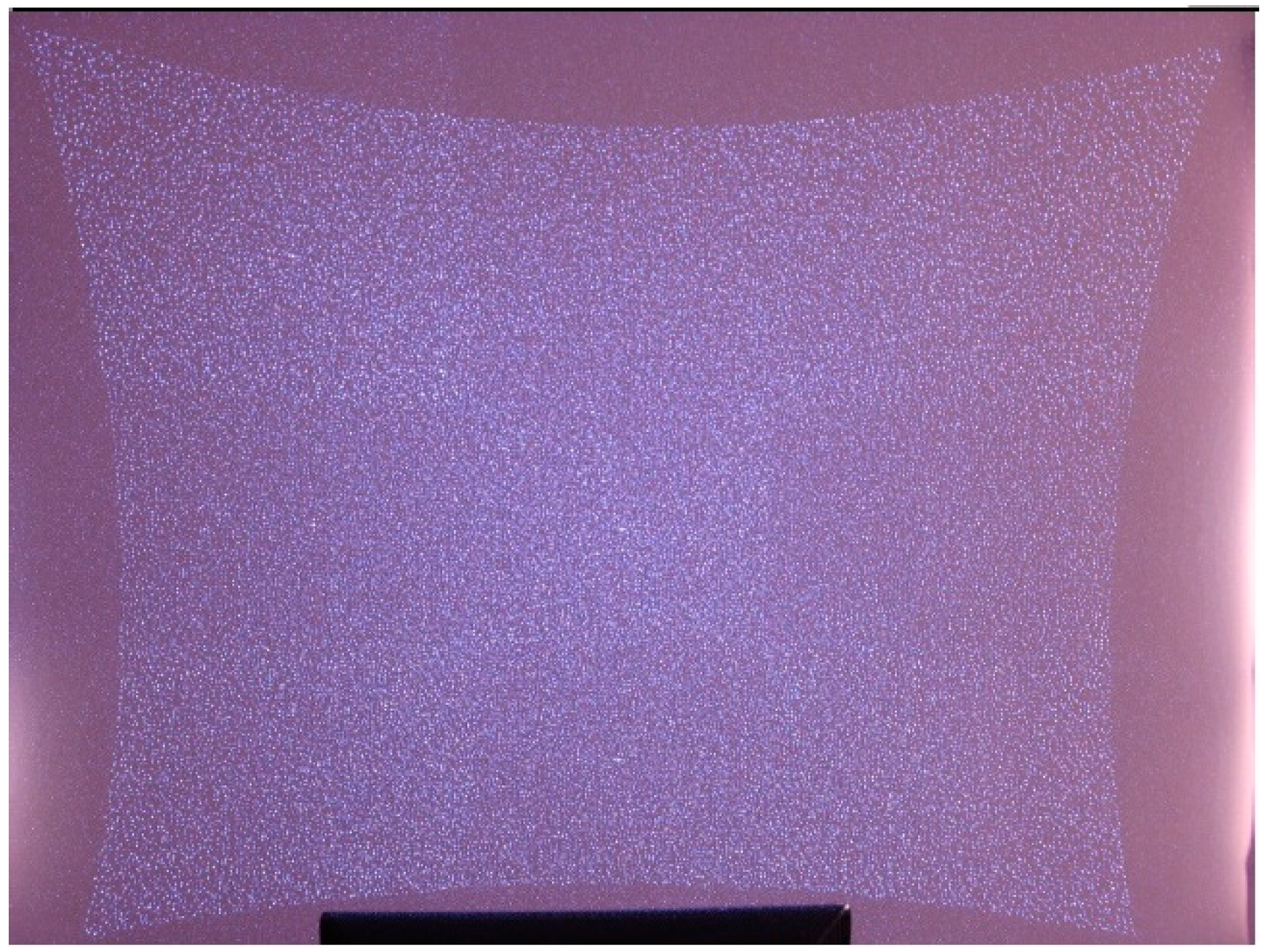
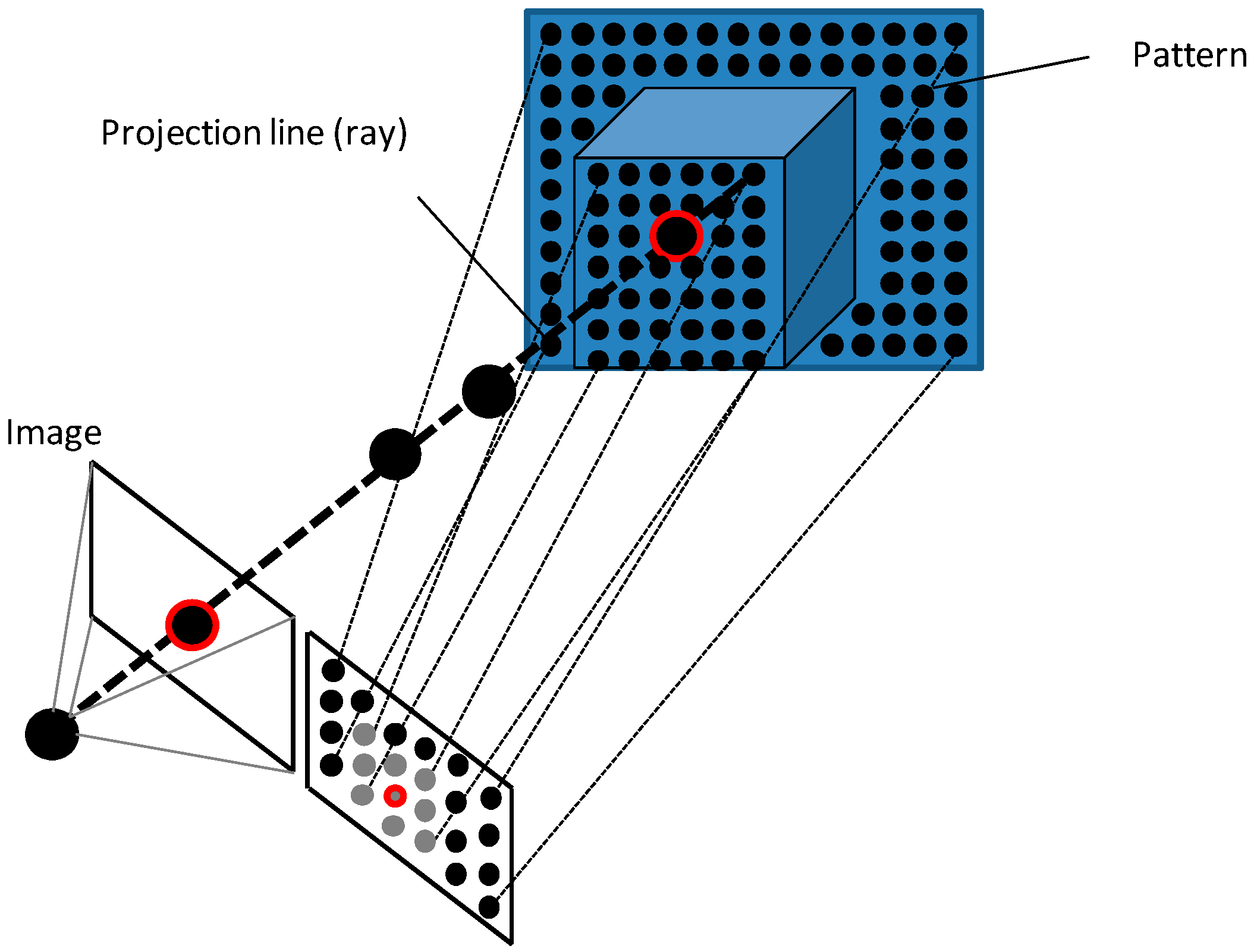
2.4. Light Coding
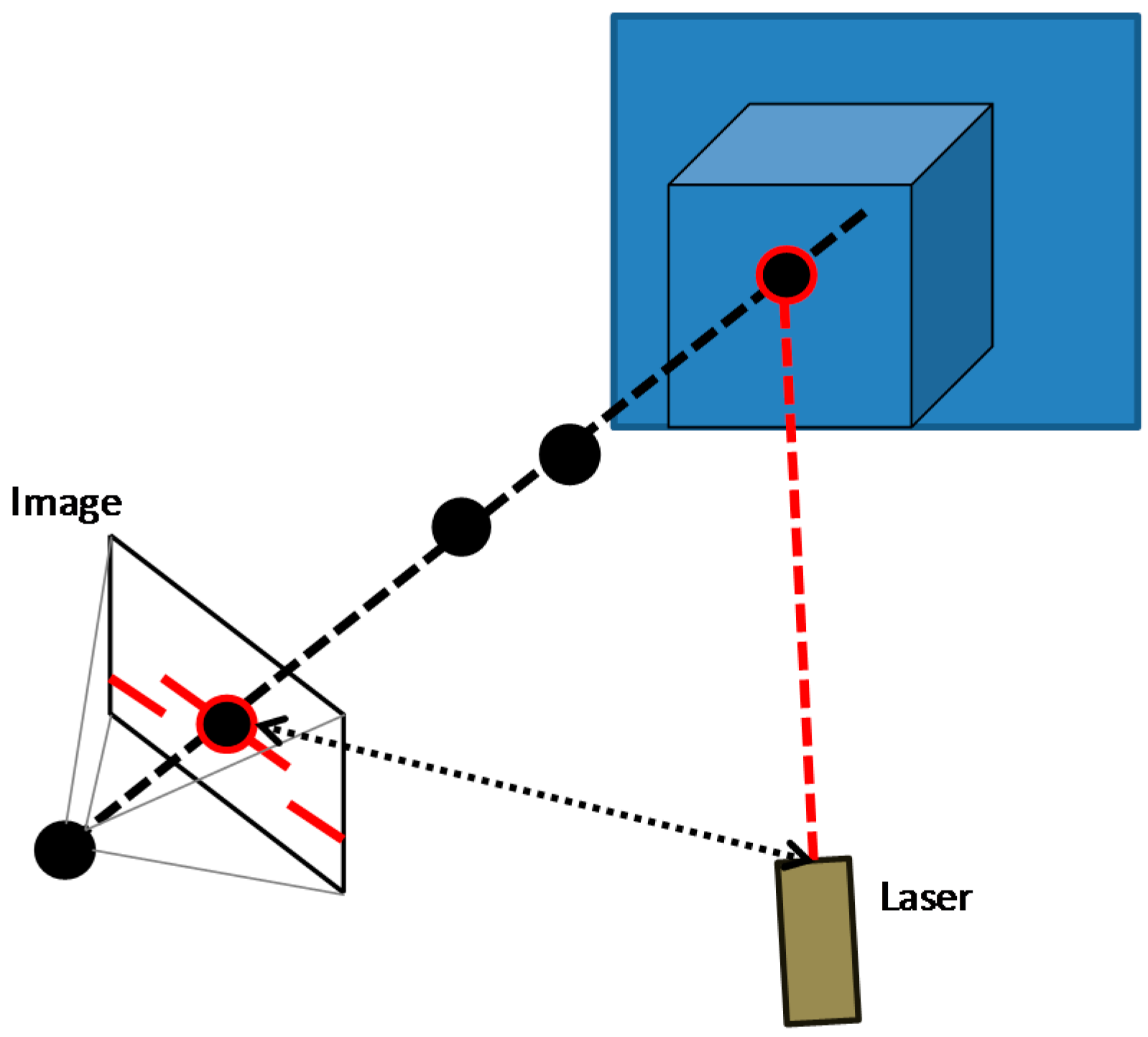
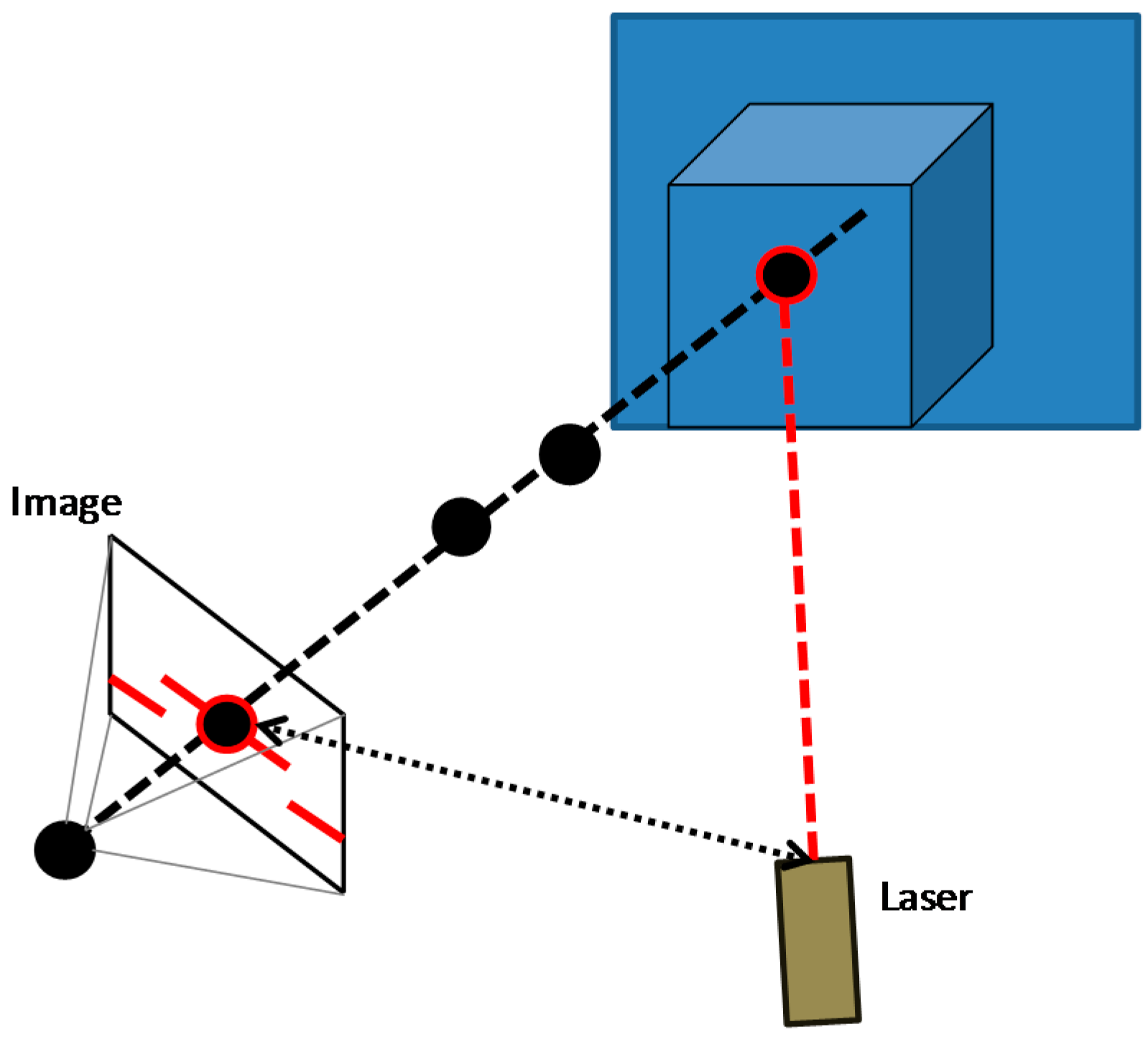
2.5. Laser Triangulation
3. Robot Guidance in Industrial Environments
3.1. Stereo Vision and Photogrammetry
3.2. Time of Flight
3.3. Structured Light
3.4. Light Coding
3.5. Laser Triangulation
4. Discussion
- Accuracy of point cloud alignment and resolution. They are mainly determined by hardware (sensor) and software (extraction, registration, segmentation, comparison, etc.), and in consistence to the size of the object and the application purpose.
- Range of the sensor. The working distance will be determined by the accessibility of robot, size of sensor and environment configurations
- Light weight. If the sensor is onboard or mounted in the end-effector, the robot has limited max load weight to ensure its full dynamics.
- Safety issues. The robot might work closely with human workers, thus sensors should avoid dangerous high-power laser to minimize any risk of accidents.
- Processing time. Processing time might be crucial to determine if a system is suitable for a certain application, especially regarding moving robots with safety constraints, i.e., availability to detect and avoid collisions with humans or obstacles. Some techniques require that object and camera remain static for the capture, thus they are not applicable for moving scenarios.
- Scanning environment. Lighting conditions, vibrations, camera movements, etc. can disturb the quality of the 3D point cloud in some techniques. It is necessary to avoid these interferences.
- Hardware and software integration with other systems. The camera will be automatically controlled by the own robot central control unit or by an external source. Ad hoc developments are oriented towards the integration and, nowadays, most of current commercial vision systems are also prepared to be connected to a robot and controlled by external software using SDKs or libraries.
- Budget. Outside of technical issues, for a real implementation, budget should also be considered. A trade-off between cost and performance is necessary as most of the previous characteristics can be achieved or improved incrementing the invested amount of money.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| 3D | Three-Dimensional |
| CPS | Cyber-physical Production Systems |
| PPP | Public-Private Partnership |
| FoF | Factories of the Future |
| ICT | Information and Communication Technologies |
| CCD | Charge-Coupled Device |
| 2D | Two-Dimensional |
| CMM | Coordinates Measuring Machine |
| KLT | Kanade-Lucas-Tomasi |
| SIFT | Scale-Invariant Feature Transform |
| SURF | Speeded Up Robust Features |
| MSER | Maximally Stable Extremal Regions |
| ToF | Time of Flight |
| LED | Light Emitting Diode |
| IR | Infra-Red |
| DOF | Degrees Of Freedom |
| RMS | Root Mean Square |
| SLAM | Simultaneous Localization and Mapping |
| CAD | Computer-Aided Design |
| HD | High Definition |
References
- Deane, P.M. The First Industrial Revolution; Cambridge University Press: Cambridge, UK, 1979. [Google Scholar]
- Kanji, G.K. Total quality management: the second industrial revolution. Total Qual. Manag. Bus. Excell. 1990, 1, 3–12. [Google Scholar] [CrossRef]
- Rifkin, J. The third industrial revolution. Eng. Technol. 2008, 3, 26–27. [Google Scholar] [CrossRef]
- Kagermann, H.; Wahlster, W.; Helbig, J. Recommendations for Implementing the Strategic Initiative Industrie 4.0: Final Report of the Industrie 4.0 Working Group; Forschungsunion: Berlin, Germany, 2013. [Google Scholar]
- Koeppe, R. New industrial robotics: human and robot collaboration for the factory. In Proceedings of the 2014 European Conference on Leading Enabling Technologies for Societal Challenges (LET’S 2014), Bologna, Italy, 29 September–1 October 2014.
- European Commission. Factories of the Future in H2020. Available online: http://ec.europa.eu/research/industrial_technologies/factories-of-the-future_en.html (accessed on 5 October 2015).
- European Factories of the Future Research Association. Factories of the Future: Multi‑Annual Roadmap for the Contractual PPP under Horizon 2020; Publications office of the European Union: Brussels, Belgium, 2013. [Google Scholar]
- European Commission and Robotics. Available online: http://ec.europa.eu/programmes/horizon2020/en/h2020-section/robotics (accessed on 11 October 2015).
- TAPAS Project. Available online: http://www.tapas-project.eu (accessed on 11 October 2015).
- Bogh, S.; Schou, C.; Rühr, T.; Kogan, Y.; Dömel, A.; Brucke, M.; Eberst, C.; Tornese, R.; Sprunk, C.; Tipaldi, G.D.; Hennessy, T. Integration and assessment of multiple mobile manipulators in a real-world industrial production facility. In Proceedings of the 45th International Symposium on Robotics (ISR 2014), Munich, Germany, 2–4 June 2014; pp. 1–8.
- VALERI Project. Available online: http://www.valeri-project.eu (accessed on 11 October 2015).
- Zhou, K.; Ebenhofer, G.; Eitzinger, C.; Zimmermann, U.; Walter, C.; Saenz, J.; Pérez, L.; Fernández, M.A.; Navarro, J. Mobile manipulator is coming to aerospace manufacturing industry. In Proceedings of the 2014 IEEE International Symposium on Robotic and Sensors Environments (ROSE 2014), Timisoara, Romania, 16–18 October 2014; pp. 94–99.
- SYMBIO-TIC Project. Available online: http://www.symbio-tic.eu (accessed on 11 October 2015).
- Labudzki, R.; Legutko, S. Applications of Machine Vision. Manuf. Ind. Eng. 2011, 2, 27–29. [Google Scholar]
- Wöhler, C. 3D Computer Vision: Efficient Methods and Applications; Springer: Dortmund, Germany, 2009. [Google Scholar]
- Alenyà, G.; Foix, S.; Torras, C. ToF cameras for active vision in robotics. Sens. Actuators A Phys. 2014, 218, 10–22. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.Y.; Zhao, C.; Zhang, D.W. Pose accuracy analysis of robot manipulators based on kinematics. Adv. Mater. Res. 2011, 201, 1867–1872. [Google Scholar] [CrossRef]
- Hefele, J.; Brenner, C. Robot pose correction using photogrammetric tracking. In Proceedings of Intelligent Systems and Smart Manufacturing; International Society for Optics and Photonics, Boston, MA, USA, 12 February 2001; pp. 170–178.
- Maas, H.G. Dynamic photogrammetric calibration of industrial robots. In Proceedings of Camera and System Calibration, San Diego, CA, USA, 27 July 1997.
- Clarke, T.; Wang, X. The control of a robot end-effector using photogrammetry. Int. Arch. Photogramm. Remote Sens. 2000, 33, 137–142. [Google Scholar]
- Salvi, J.; Armangué, X.; Batlle, J. A comparative review of camera calibrating methods with accuracy evaluation. Pattern Recognit. 2002, 35, 1617–1635. [Google Scholar] [CrossRef]
- Faugeras, O. Three-dimensional Computer Vision: A Geometric Viewpoint; MIT Press: Massachusetts, MA, USA, 1993. [Google Scholar]
- Usamentiaga, R.; Molleda, J.; García, D.F. Structured-light sensor using two laser stripes for 3D reconstruction without vibrations. Sensors 2014, 14, 20041–20063. [Google Scholar] [CrossRef] [PubMed]
- Sturm, P.; Ramalingam, S.; Tardif, J.P.; Gasparini, S.; Barreto, J. Camera models and fundamental concepts used in geometric computer vision. Found. Trends Comput. Gr. Vis. 2011, 6, 1–183. [Google Scholar] [CrossRef]
- Hanning, T. High Precision Camera Calibration; Springer: Wiesbaden, Germany, 2011. [Google Scholar]
- Usamentiaga, R.; Molleda, J.; García, D.F.; Pérez, L.; Vecino, G. Real-time line scan extraction from infrared images using the wedge method in industrial environments. J. Electron. Imaging 2010, 19, 043017. [Google Scholar] [CrossRef]
- Wilson, A. Choosing a 3D Vision System for Automated Robotics Applications. Vis. Syst. Des. 2014, 19. Available online: http://www.vision-systems.com/articles/print/volume-19/issue-11/features/choosing-a-3d-vision-system-for-automated-robotics-applications.html (accessed on 11 December 2014). [Google Scholar]
- Ramos, B.; Santos, E. Comparative study of different digitization techniques and their accuracy. Comput.-Aided Des. 2011, 43, 188–206. [Google Scholar]
- Yilmaz, H.M.; Yakar, M.; Gilec, S.A.; Dulgerler, O.N. Importance of digital close-range photogrammetry in documentation of cultural heritage. J. Cult. Herit. 2007, 8, 428–433. [Google Scholar] [CrossRef]
- Werner, T.; Zisserman, A. New techniques for automated architecture reconstruction from photographs. In Proceedings of the Seventh European Conference on Computer Vision (ECCV 2002), Copenhagen, Denmark, 28–31 May 2002; pp. 541–555.
- Werner, T.; Zisserman, A. Model selection for automated architectural reconstruction from multiple views. In Proceedings of the Thirteenth British Machine Vision Conference (BMVC 2002), Cardiff, UK, 2–5 September 2002; pp. 53–62.
- Werner, T.; Schaffalitzky, F.; Zisserman, A. Automated architecture reconstruction from close-range photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 352–359. [Google Scholar]
- Lane, S.N.; James, T.D.; Crowell, M.D. Application of digital photogrammetry to complex topography for geomorphological research. Photogramm. Rec. 2000, 16, 793–821. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Corville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Dueholm, K.S.; Garde, A.A.; Pedersen, A.K. Preparation of accurate geological and structural maps, cross-sections or block diagrams from colour slides, using multi-model photogrammetry. J. Struct. Geol. 1993, 15, 933–937. [Google Scholar] [CrossRef]
- Eisenbeiss, H.; Lambers, K.; Sauerbier, M.; Li, Z. Photogrammetric documentation of an archaeological site using and autonomous model helicopter. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, 238–243. [Google Scholar]
- Granshaw, S.I. Bundle adjustment methods in engineering photogrammetry. Photogramm. Rec. 1980, 10, 181–207. [Google Scholar] [CrossRef]
- Fraser, C.S.; Brown, D.C. Industrial photogrammetry: New developments and recent applications. Photogramm. Rec. 1986, 12, 197–217. [Google Scholar] [CrossRef]
- Goldan, M.; Kroon, R. As-built products modelling and reverse engineering in shipbuilding through combined digital photogrammetry and CAD/CAM technology. J. Sh. Prod. 2003, 19, 98–104. [Google Scholar]
- Luhmann, T.; Robson, S.; Kyle, S.; Harley, I. Close Range Photogrammetry. Principles, techniques and applications; Whittles Publishing: Caithness, UK, 2006. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Harris, C.; Stephens, M. A combined corner and edge detector. In Proceedings of the Alvey vision Conference, Manchester, UK, 2 September 1998.
- Lucas, B.D.; Kanade, T. An iterative image registration technique with an application to stereo vision. In Proceedings of the Seventh International Joint Conference on Artificial Intelligence (IJCAI 1981), Vancouver, BC, Canada, 24–28 August 1981; pp. 674–679.
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Kimmel, R.; Zhang, C.; Bronstein, A.; Bronstein, M. Are MSER features really interesting? IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2316–2320. [Google Scholar] [CrossRef] [PubMed]
- IDS Whitepapers. Available online: https://en.ids-imaging.com/whitepaper.html (accessed on 30 July 2015).
- Ensenso—Stereo 3D Cameras. Available online: http://www.ensenso.com (accessed on 13 December 2015).
- Lim, J. Optimized projection pattern supplementing stereo systems. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA 2009), Kobe, Japan, 12–17 May 2009; pp. 2823–2829.
- Konolige, K. Projected texture stereo. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA 2010), Anchorage, KY, USA, 3–7 May 2010; pp. 148–155.
- Time of Flight-Heptagon. Available online: http://hptg.com/technology/time-of-flight/ (accessed on 13 December 2015).
- Kolb, A.; Barth, E.; Koch, R.; Larsen, R. Time-of-flight sensors in computer graphics (state-of-the-art report). In Proceedings of Eurographics 2009-State of the Art Reports, Munich, Germany, 30 March–2 April 2009.
- Chen, F.; Brown, G.; Song, M. Overview of three dimensional shape measurement using optical methods. Opt. Eng. 2000, 39, 10–22. [Google Scholar] [CrossRef]
- Pagès, J.; Collewet, C.; Chaumette, F.; Salvi, J. A camera-projector system for robot positioning by visual servoing. In Proceedings of the 2006 Conference on Computer Vision and Pattern Recognition Workshop (CVPRW 2006), New York, NY, USA, 17–22 June 2006.
- Salvi, J. An Approach to Coded Structured Light to Obtain Three Dimensional Information. Ph.D. Thesis, University of Gerona, Gerona, Spain, 1997. [Google Scholar]
- Bernal, C.; Agustina, B.; Marín, M.M.; Camacho, A.M. Performance evaluation of optical scanner based on blue led structured light. Proc. Eng. 2013, 63, 591–598. [Google Scholar] [CrossRef]
- LMI Technologies. Available online: http://lmi3d.com/products (accessed on 30 October 2015).
- Viager, M. Analysis of Kinect for Mobile Robots; Individual course report; Technical University of Denmark: Kongens Lyngby, Denmark, 2011. [Google Scholar]
- Khoshelham, K.; Elberink, S.O. Accuracy and resolution of kinect depth data for indoor mapping applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [PubMed]
- Mahmud, M.; Joannic, D.; Roy, M.; Isheil, A.; Fontaine, J.F. 3D part inspection path planning of a laser scanner with control on the uncertainty. Comput.-Aided Des. 2011, 43, 345–355. [Google Scholar] [CrossRef]
- Salmi, T.; Väätäinen, O.; Malm, T.; Montonen, J.; Marstio, I. Meeting new challenges and possibilities with modern robot safety technologies. In Enabling Manufacturing Competitiveness and Economic Sustainability; Springer International Publishing: Montreal, QC, Canada, 2014; pp. 183–188. [Google Scholar]
- Point Cloud Library (PCL). Available online: http://pointclouds.org/documentation/tutorials/ (accessed on 29 July 2015).
- Luhmann, T. Close range photogrammetry for industrial applications. ISPRS J. Photogramm. Remote Sens. 2010, 65, 558–569. [Google Scholar] [CrossRef]
- Rieke-Zapp, D.; Tecklenburg, W.; Peipe, J.; Hastedt, H.; Haig, C. Evaluation of the geometric stability and the accuracy potential of digital cameras-Comparing mechanical stabilisation versus parametrisation. ISPRS J. Photogramm. Remote Sens. 2009, 64, 248–258. [Google Scholar] [CrossRef]
- Broers, H.; Jansing, N. How precise is navigation for minimally invasive surgery? Int. Orthop. 2007, 31, 39–42. [Google Scholar] [CrossRef] [PubMed]
- Laser Tracker Systems—Leica Geosystems. Available online: http://www.leica-geosystems.com/en/Laser-Tracker-Systems_69045.htm (accessed on 2 November 2015).
- Shirinzadeh, B.; Teoh, P.L.; Tian, Y.; Dalvand, M.M.; Zhong, Y.; Liaw, H.C. Laser interferometry-based guidance methodology for high precision positioning of mechanisms and robots. Robotics Computer-Integrated Manuf. 2010, 26, 74–82. [Google Scholar] [CrossRef]
- Vincze, M.; Prenninger, J.P.; Gander, H. A laser tracking system to measure position and orientation of robot end effectors under motion. Int. J. Robotics Res. 1994, 13, 305–314. [Google Scholar] [CrossRef]
- Dumas, C.; Caro, S.; Mehdi, C.; Garnier, S.; Furet, B. Joint stiffness identification of industrial serial robots. Robotica 2012, 30, 649–659. [Google Scholar] [CrossRef]
- Qu, W.W.; Dong, H.Y.; Ke, Y.L. Pose accuracy compensation technology in robot-aided aircraft assembly drilling process. Acta Aeronaut. Astronaut. Sinica 2011, 32, 1951–1960. [Google Scholar]
- Leikas, E. Robot guidance with a photogrammetric 3-D measuring system. Ind. Robot 1999, 26, 105–108. [Google Scholar] [CrossRef]
- Hefele, J.; Brenner, C. Real-time photogrammetric algorithms for robot calibration. Int. Archives Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 33–38. [Google Scholar]
- Liu, B.; Zhang, F.; Qu, X. A method for improving the pose accuracy of a robot manipulator based on multi-sensor combined measurement and data fusion. Sensors. 2015, 15, 7933–7952. [Google Scholar] [CrossRef] [PubMed]
- Amdal, K. Single camera system for close range industrial photogrammetry. Int. Archives Photogramm. Remote Sens. 1992, 29, 6–10. [Google Scholar]
- Luhmann, T. Precision potential of photogrammetric 6DOF pose estimation with a single camera. ISPRS J. Photogramm. Remote Sens. 2009, 64, 275–284. [Google Scholar] [CrossRef]
- IDS Case Studies. Available online: https://en.ids-imaging.com/case-studies.html (accessed on 30 July 2015).
- Carroll, J. 3D vision system assists in robotic bin picking. Vis. Syst. Des. 2014, 19. Available online: http://www.vision-systems.com/articles/2014/08/3d-vision-system-assists-in-robotic-bin-picking.html (accessed on 29 August 2014). [Google Scholar]
- Sturm, J.; Konolige, K.; Stachniss, C.; Burgard, W. 3D pose estimation, tracking and model learning of articulated objects from dense depth video using projected texture stereo. In Proceedings of the 2010 RGB-D: Advanced Reasoning with Depth Cameras Workshop, Zaragoza, Spain, 27 June 2010.
- Weingarten, J.W.; Gruener, G.; Siegwart, R. A state-of-the-art 3D sensor for robot navigation. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004), Sendai, Japan, 28 September–2 October 2004; pp. 2155–2160.
- May, S.; Werner, B.; Surmann, H.; Pervolz, K. 3D time-of-flight cameras for mobile robotics. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2006), Beijing, China, 9–15 October 2006; pp. 790–795.
- May, S.; Droeschel, D.; Holz, D.; Wiesen, C.; Fuchs, S. 3D pose estimation and mapping with time-of-flight cameras. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2008), 3D Mapping Workshop, Nice, France, 22–26 September 2008.
- Hedge, G.; Ye, C. Extraction of planar features from Swissranger SR-3000 range images by a clustering method using normalized cuts. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2009), St. Louis, MO, USA, 10–15 October 2009; pp. 4034–4039.
- Ohno, K.; Nomura, T.; Tadokoro, S. Real-time robot trajectory estimation and 3D map construction using 3D camera. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2006), Beijing, China, 9–15 October 2006; pp. 5279–5285.
- Stipes, J.A.; Cole, J.G.P.; Humphreys, J. 4D scan registration with the SR-3000 LIDAR. In Proceedings of the 2008 International Conference on Robotics and Automation (ICRA 2008), Pasadena, CA, USA, 19–23 May 2008; pp. 2988–2993.
- Arbeiter, G.; Fischer, J.; Verl, A. 3-D-Environment reconstruction for mobile robots using fast-SLAM and feature extraction. In Proceedings of the Forty-first International Symposium on Robotics (ISR 2010), Munich, Germany, 7–9 June 2010.
- Kuhnert, K.D.; Stommel, M. Fusion of stereo-camera and PMD-camera data for realtime suited precise 3D environment reconstruction. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2006), Beijing, China, 9–15 October 2006; pp. 4780–4785.
- Netramai, C.; Oleksandr, M.; Joochim, C.; Roth, H. Motion estimation of a mobile robot using different types of 3D sensors. In Proceedings of the Fourth International Conference on Autonomic and Autonomous Systems (ICAS 2008), Gosier, France, 16–21 March 2008; pp. 148–153.
- Dellen, B.; Alenyà, G.; Foix, S.; Torras, C. 3D object reconstruction from swissranger sensors data using a spring-mass model. In Proceedings of the Fourth International Conference on Computer Vision Theory Applications, Lisbon, Portugal, 5–8 February 2009; pp. 368–372.
- Foix, S.; Alenyà, G.; Andrade-Cetto, J.; Torras, C. Object modelling using a ToF camera under an uncertainty reduction approach. In Proceedings of the 2010 IEEE International Conference on Robotics Automation (ICRA 2010), Anchorage, KY, USA, 3–7 May 2010; pp. 1306–1312.
- Haddadin, S.; Suppa, M.; Fuchs, S.; Bodenmüller, T.; Albu-Schäffer, A.; Hirzinger, G. Towards the robotic co-worker. Robotics Res. 2011, 70, 261–282. [Google Scholar]
- Fuchs, S.; May, S. Calibration and registration for precise surface reconstruction with time of flight cameras. Int. J. Intell. Syst. Technol. Appl. 2008, 5, 274–284. [Google Scholar] [CrossRef]
- Kuehnle, J.U.; Xue, Z.; Stotz, M.; Zoellner, J.M.; Verl, A.; Dillmann, R. Grasping in depth maps of time-of-flight cameras. In Proceedings of the 2008 IEEE International Workshop on Robotic and Sensors Environments (ROSE 2008), Ottawa, ON, Canada, 17–18 October 2008; pp. 132–137.
- Saxena, A.; Wong, L.; Ng, A.Y. Learning grasp strategies with partial shape information. In Proceedings of the Twenty-third AAAI Conference on Artificial Intelligence, Chicago, IL, USA, 13–17 July 2008; pp. 1491–1494.
- Maldonado, A.; Klank, U.; Beetz, M. Robotic grasping of unmodeled objects using time-of-flight range data and finger torque information. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2010), Taipei, Taiwan, 18–22 October 2010; pp. 2586–2591.
- Foix, S.; Alenyà, G.; Torras, C. Exploitation of Time-of-Flight (ToF) Cameras; Technical Report; CSIC-UPC: Barcelona, Spain, December 2010. [Google Scholar]
- Claes, K.; Bruyninckx, H. Robot positioning using structured light patterns suitable for self calibration and 3D tracking. In Proceedings of the Thirteenth International Conference on Advanced Robotics, Daegu, Korea (South), 22–25 August 2007.
- Le Moigne, J.J.; Waxman, A.M. Structured light patterns for robot mobility. J. Robotics Autom. 1988, 4, 541–548. [Google Scholar] [CrossRef]
- Patra, S.; Bhowmick, B.; Banerjee, S.; Kalra, P. High resolution point cloud generation from kinect and HD cameras using graph cut. In Proceedings of the 2012 International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISAPP 2012), Rome, Italy, 24–26 February 2012.
- Susperregi, L.; Sierra, B.; Castrillón, M.; Lorenzo, J.; Martínez-Otzeta, J.M.; Lazkano, E. On the use of a low-cost thermal sensor to improve kinect people detection in a mobile robot. Sensors. 2013, 13, 14687–14713. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Schmidt, B.; Nee, A.Y.C. Vision-guided active collision avoidance for human-robot collaborations. Manuf. Lett. 2013, 1, 5–8. [Google Scholar] [CrossRef]
- FlexSort Project. Available online: http://www.prodintec.es/prodintec/g_noticias?accion=detalleNoticia&id=159 (accessed on 15 November 2015).
- Brosed, F.J.; Santolaria, J.; Aguilar, J.J.; Guillomía, D. Laser triangulation sensor and six axes anthropomorphic robot manipulator modelling for the measurement of complex geometry products. Robot. Comput.-Integr. Manuf. 2012, 2, 660–671. [Google Scholar] [CrossRef]
- Nguyen, V.; Martinelli, A.; Tomatis, N.; Siegwart, R. A comparison of line extraction algorithms using 2D laser rangefinder for indoor mobile robotics. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2005), Edmonton, AB, Canada, 2–6 August 2005; pp. 1929–1934.
- Borges, G.A.; Aldon, M.J. line extraction in 2D range images for mobile robotics. J. Intell. Robotic Syst. 2004, 40, 267–297. [Google Scholar] [CrossRef]
- Agapakis, J.E.; Katz, J.M.; Friedman, J.M.; Epstein, G.N. Vision-aided robotic welding: An approach and a flexible implementation. Int. J. Robotics Res. 1990, 9, 17–34. [Google Scholar] [CrossRef]
- Fernández, A.; Acevedo, R.G.; Alvarez, E.A.; López, A.C.; García, D.F.; Usamentiaga, R.; Sánchez, J. Low-cost system for weld tracking based on artificial vision. IEEE Trans. Ind. Appl. 2011, 47, 1159–1167. [Google Scholar] [CrossRef]
- Khadraoui, D.; Motyl, G.; Martinet, P.; Gallice, J.; Chaumette, F. Visual servoing in robotics scheme using a camera/laser-stripe sensor. In Proceedings of the 1996 IEEE International Conference on Robotics and Automation (ICRA 1996), Minneapolis, MN, USA, 22–28 April 1996; pp. 743–750.
- Pears, N.; Probert, P. An optical range sensor for mobile robot guidance. In Proceedings of the 1993 IEEE International Conference on Robotics and Automation (ICRA 1993), Atlanta, GA, USA, 2–6 May 1993; pp. 659–664.
- Einsele, T. Real-time self-localization in unknown indoor environments using a panorama laser range finder. In Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 1997), Grenoble, France, 11 September 1997; pp. 697–702.
- Jensfelt, P.; Christensen, H. Laser based position acquisition and tracking in an indoor environment. In Proceedings of the 1998 International Symposium on Robotics and Automation (ISRA 1998), Leuven, Belgium, 20 May 1998.
- Zhang, L.; Ghosh, B.K. Line segment based map building and localization using 2D laser rangefinder. In Proceedings of the 2000 IEEE International Conference on Robotics and Automation (ICRA 2000), San Francisco, CA, USA, 24–28 April 2000; pp. 2538–2543.
- Gühring, J. Dense 3D surface acquisition by structured light using off-the-shelf components. In Proceedings of Videometrics and Optical Methods for 3D Shape Measurement, San Jose, CA, USA, 20 January 2001. SPIE: 2001.
- Hashimoto, K. A Review on vision-based control of robot manipulators. Adv. Robotics 2003, 17, 969–991. [Google Scholar]
- Lazaros, N.; Sirakoulis, G.C.; Gasteratos, A. review of stereo vision algorithms: from software to hardware. Int. J. Optomechatronics 2008, 2, 435–462. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Single Camera | Multiple Cameras | |
|---|---|---|
| Passive vision | 2D | Stereo vision Photogrammetry |
| Active vision | Time of flight Structured light Light coding Laser triangulation | Structured light Projected texture stereo vision |
| Accuracy | Range | Weight | Safety | Processing Time | Environmental Influences | |
|---|---|---|---|---|---|---|
| Stereo Vision and Photogrammetry | ✓ (50 µm [64]) | ✓ | ✓ | ✓ | ✗ (image processing) | ✗ (brightness) |
| Projected Texture Stereo Vision | ✓ (0.1 mm [48]) | ✗ (0.25–3 m [48]) | ✓ | ✓ | ✗ (image processing) | ✗ (brightness) |
| Time of Flight | ✗ (10 mm [51]) | ✗ (0.8–8 m [16]) | ✓ | ✓ | ✓ | ✓ |
| Structured White Light | ✓ (0.127 mm [112]) | ✓ | ✗ (projector [96]) | ✓ | ✗ (remain static) | ✗ (light, brightness) |
| Structured Blue LED Light | ✓ (34 µm [57]) | ✗ (157–480 mm [57]) | ✓ | ✓ | ✗ (remain static) | ✓ |
| Light Coding | ✗ (10 mm [58]) | ✗ (1–3 m [59]) | ✓ | ✓ | ✓ | ✗ (sun) |
| Laser Triangulation | ✓ | ✓ | ✓ | ✗ (laser power) | ✓ | ✗ (brightness) |
| Advantages | Disadvantages | |
|---|---|---|
| Stereo Vision and Photogrammetry | Commonly used. Accuracy. | Influenced by environment. Physical marks are necessary. The density of the point cloud can be low. Object and camera must be static for the capture. |
| Projected Texture Stereo Vision | Physical marks are not required. | Influenced by environment. Object and camera must be static for the capture. |
| Time of Flight | Independent of ambient light. Not necessary that object and camera remain static for the capture. | Low theoretical accuracy. |
| Structured White Light | Accuracy. | Sometimes influenced by ambient light. Problems to create the 3D model for surfaces of certain colors. Expensive. Sensors can be quite large. Object and camera must be static for the capture. |
| Structured Blue LED Light | Accuracy. Small sensor. | Short working distance. Object and camera must be static for the capture. Expensive. |
| Light Coding | Inexpensive. Not necessary that object and camera remain static for the capture. | Low accuracy. Uncertified at industrial level. |
| Laser Triangulation | Commonly used. Inexpensive (depending on the laser, the accuracy). | Dangerous for people depending on laser power. Usually short working distance. Line scanner. |
| Scene-Related | Object-Related | ||||
| People detection | Environment reconstruction / navigation | Object reconstruction / inspection | Bin picking / object manipulation | Robot pose / calibration | |
| Stereo Vision and Photogrammetry | [74] | [18,19,20,67,68,69,70,71,72,73] | |||
| Projected Texture Stereo Vision | [76,77,78] | ||||
| Time of Flight | [95] | [79,80,81,82,83,84,85,86,87] | [88,89,90,91] | [92,93,94] | |
| Structured Light | [11,54,96] | ||||
| Light Coding | [61,98,99,100] | ||||
| Laser Triangulation | [103,104,105,106,107,108,109,110,111] | [102] | [101] | [107] | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez, L.; Rodríguez, Í.; Rodríguez, N.; Usamentiaga, R.; García, D.F. Robot Guidance Using Machine Vision Techniques in Industrial Environments: A Comparative Review. Sensors 2016, 16, 335. https://doi.org/10.3390/s16030335
Pérez L, Rodríguez Í, Rodríguez N, Usamentiaga R, García DF. Robot Guidance Using Machine Vision Techniques in Industrial Environments: A Comparative Review. Sensors. 2016; 16(3):335. https://doi.org/10.3390/s16030335
Chicago/Turabian StylePérez, Luis, Íñigo Rodríguez, Nuria Rodríguez, Rubén Usamentiaga, and Daniel F. García. 2016. "Robot Guidance Using Machine Vision Techniques in Industrial Environments: A Comparative Review" Sensors 16, no. 3: 335. https://doi.org/10.3390/s16030335