
An Effective Collaborative Mobile Weighted Clustering Schemes for Energy Balancing in Wireless Sensor Networks

Abstract
:1. Introduction
2. Related Works
3. Background
3.1. Traditional Routing Protocols
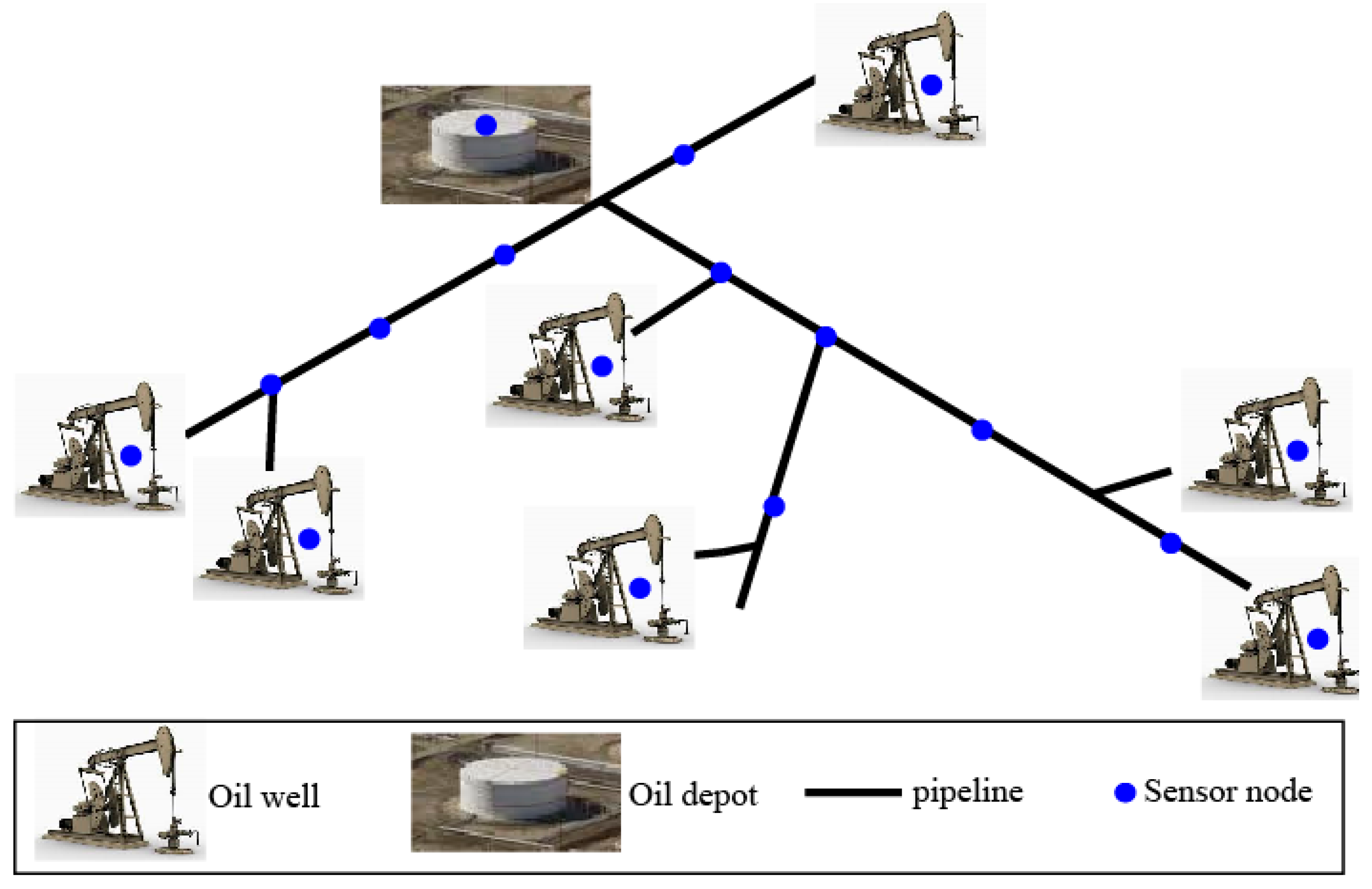
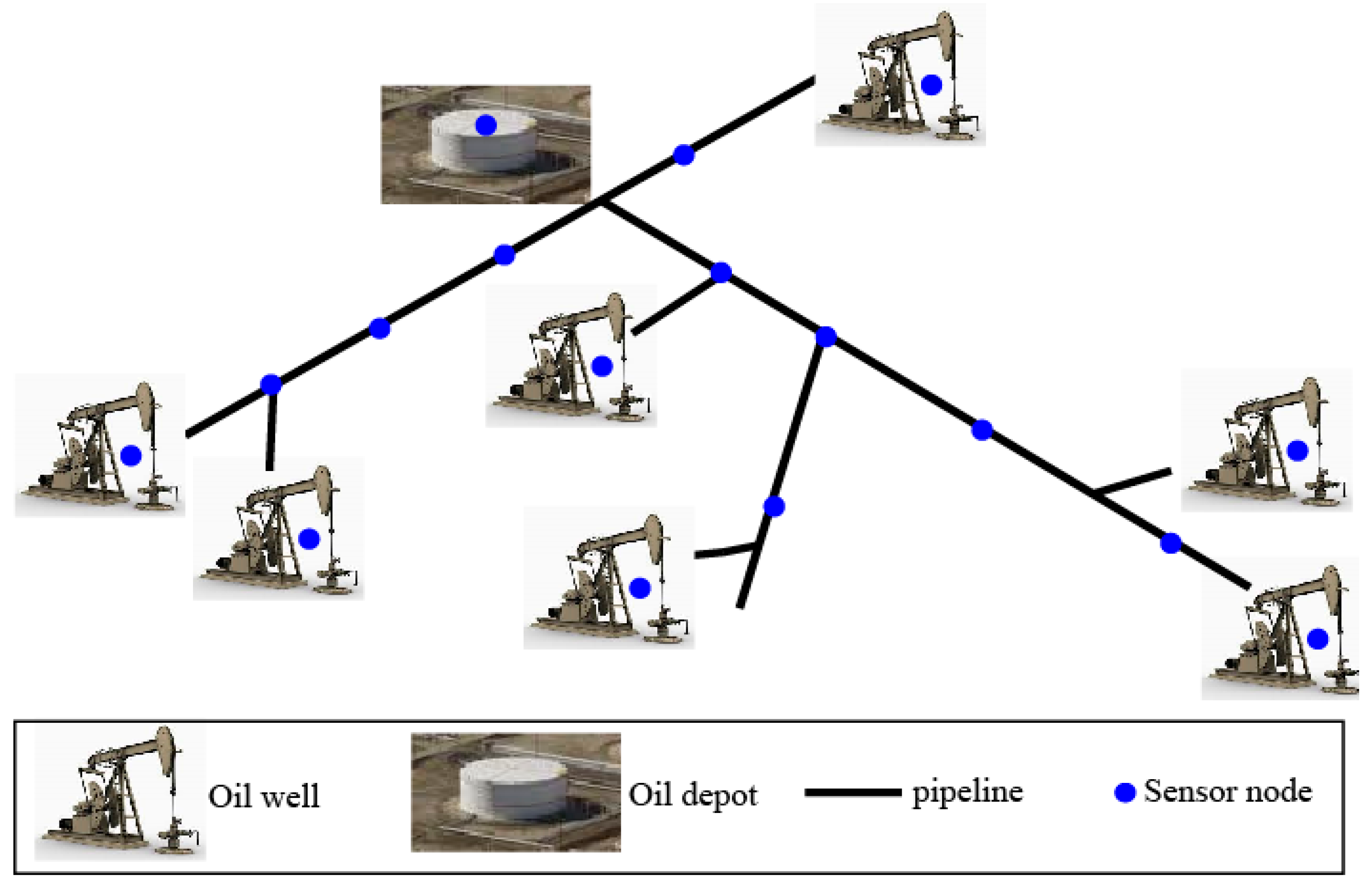
3.2. Application Scenario
- (1)
- Operate in hostile areas where environmental and platform conditions may be very harsh. Because oil facilities are often installed far away from the cities and towns, it is very possible that no cellular mobile communication services are available.
- (2)
- Meet the requirement of temporary sensor installation.
- (3)
- Reduce maintenance difficulty with limited battery consumption.
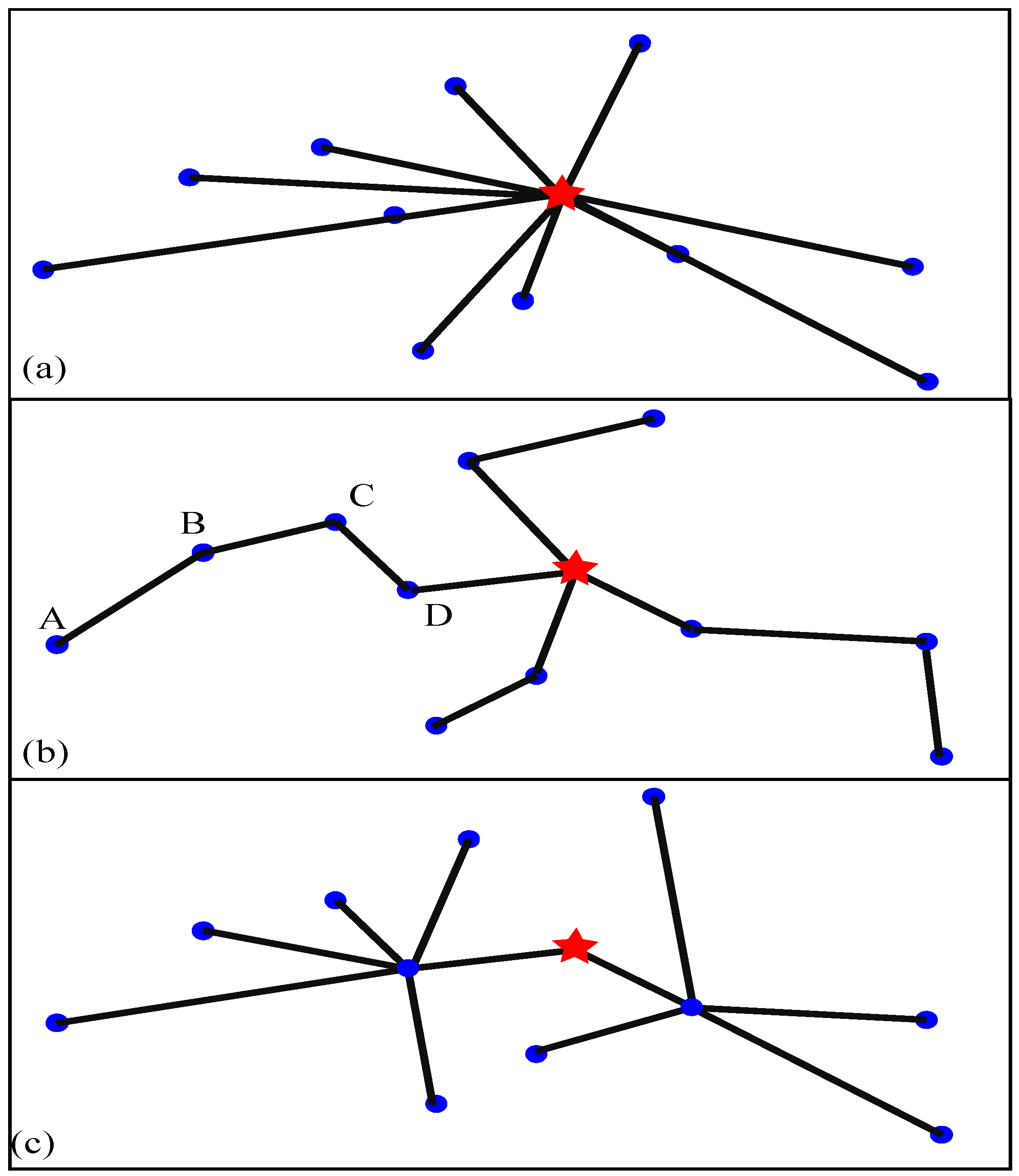
3.3. Virtual Grid Margin Optimization
4. The Proposed Collaborative Weighted Clustering Protocol
4.1. System Optimal Model and Problem Formulation
4.2. Dynamic Clustering Protocols
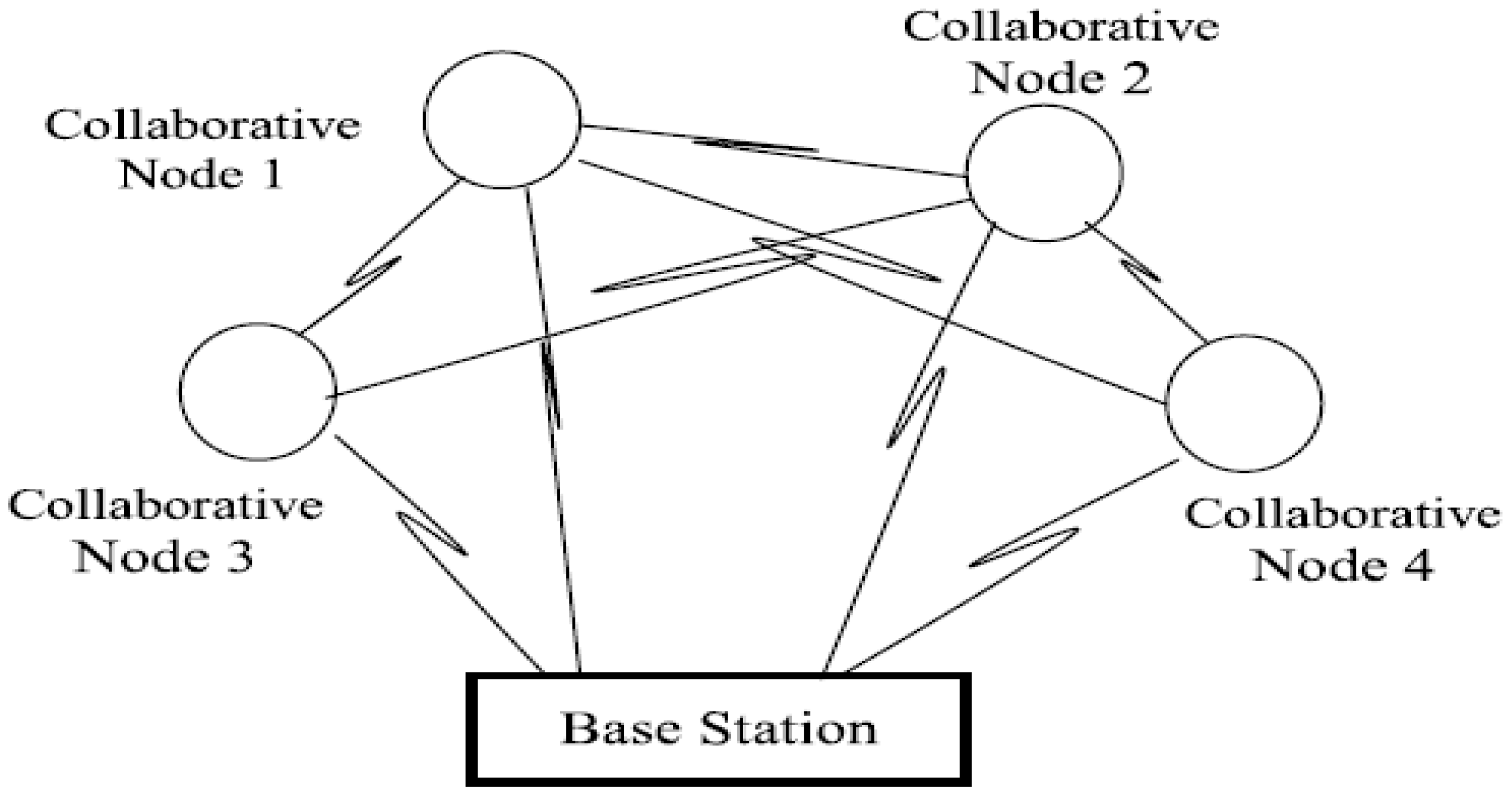
4.3. Collaborative Weighted Clustering Algorithm
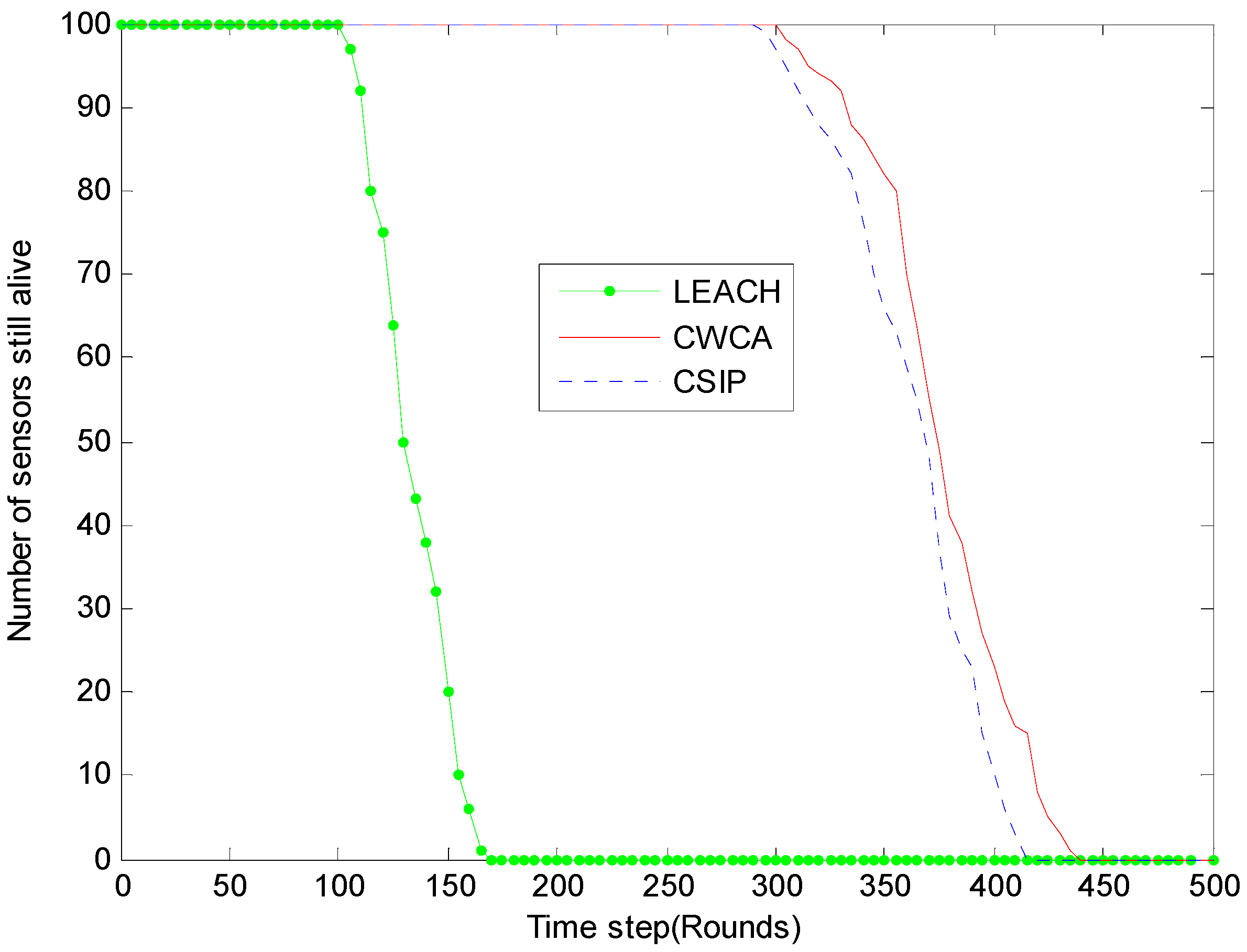
5. Simulations and Results
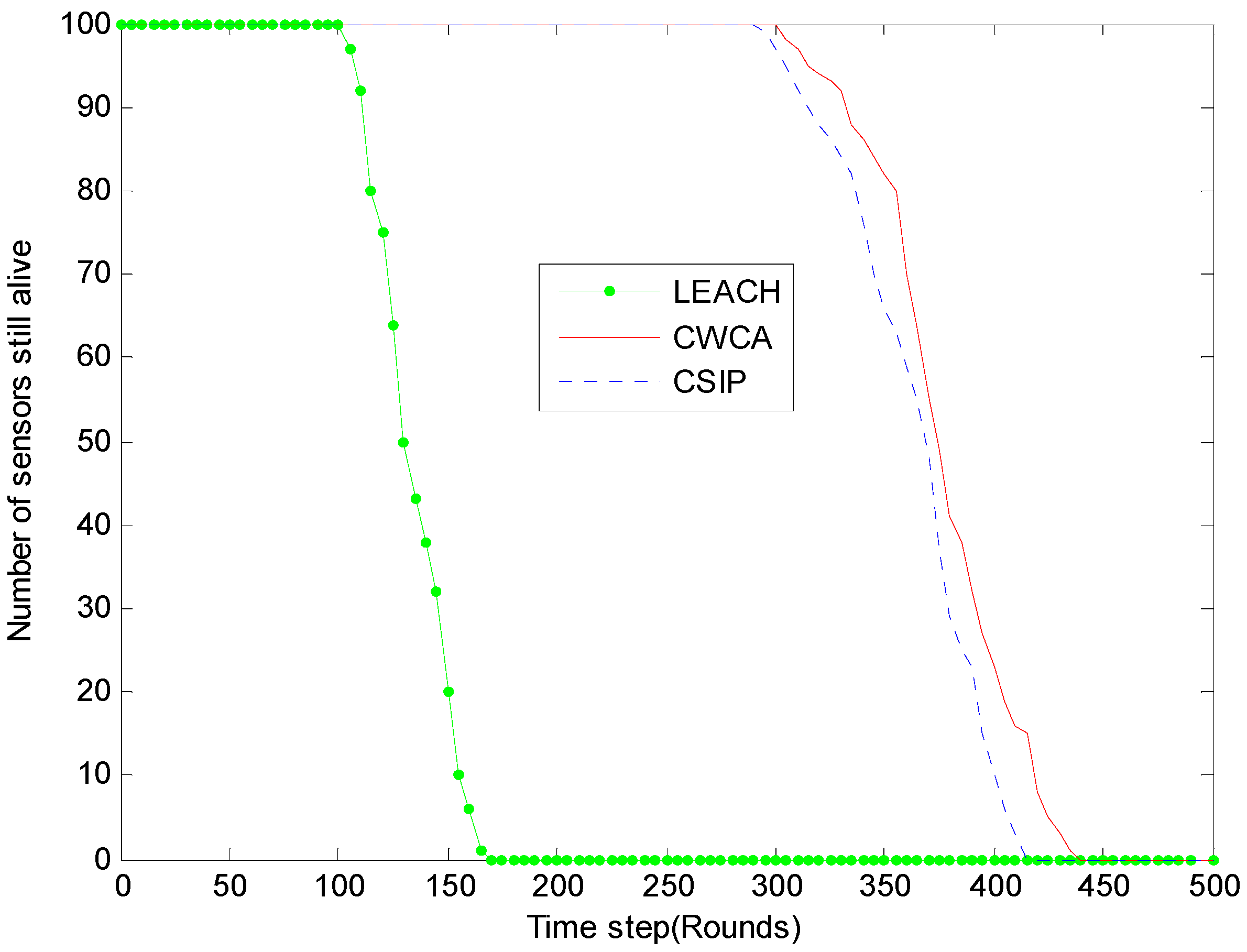
5.1. Normal Production Monitoring
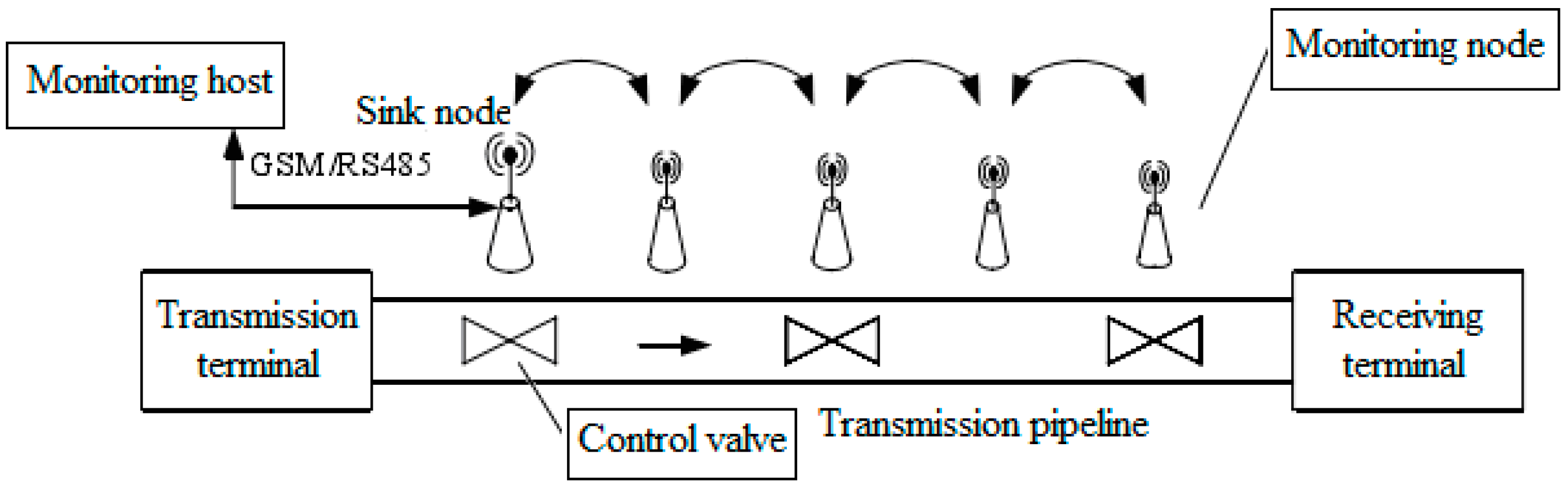
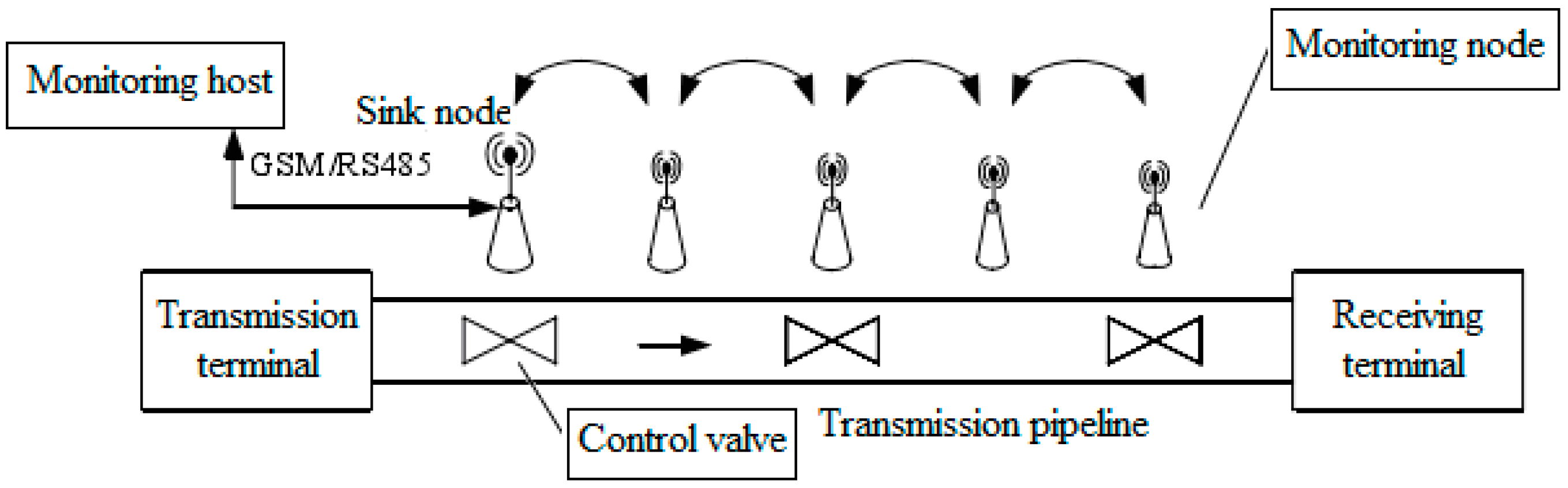
5.2. Pipeline Inspection
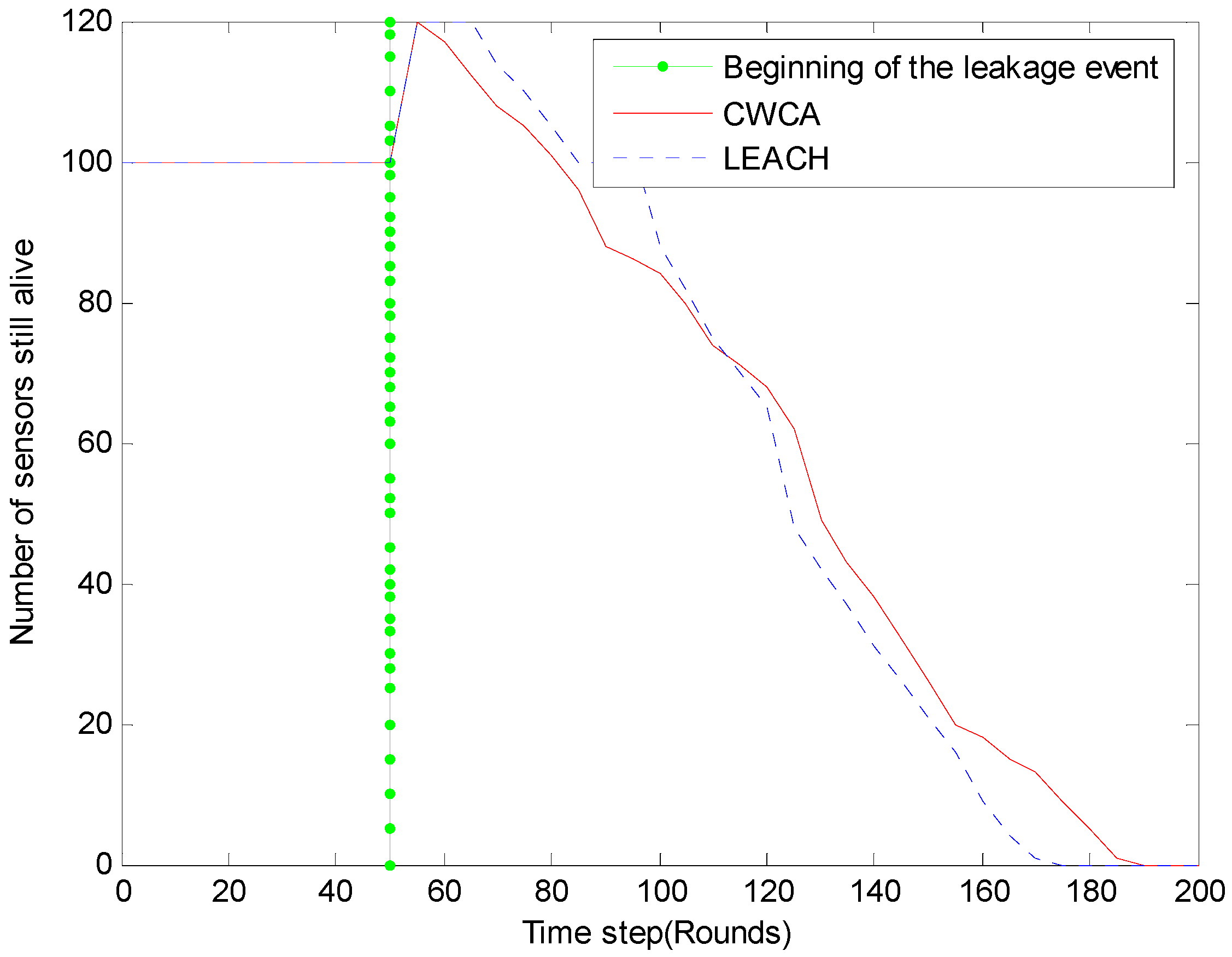
5.3. Oil Leakage Monitoring
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akhondi, M.R.; Talevski, A.; Carlsen, S.; Petersen, S. Applications of wireless sensor networks in the oil, gas and resources industries. In Proceedings of the 24th IEEE International Conference on Advanced Information Networking and Applications, Perth, Australia, 20–23 April 2010; pp. 941–948.
- Petersen, S.; Doyle, P.; Vatland, S.; Aasland, C.S.; Andersen, T.M.; Sjong, D. Requirements, drivers and analysis of wireless sensor network solutions for the Oil & Gas industry. In Proceedings of the IEEE Conference on Emerging Technologies and Factory Automation, Patras, Greece, 25–28 September 2007; pp. 219–226.
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Anastasi, G.; Francesco, M.D.; Conti, M. A Pascrell Energy conservation in wireless sensor networks: A survey. Ad Hoc Netw. 2009, 8, 537–568. [Google Scholar] [CrossRef]
- Fan, X.; Yuan, C.; Malone, B. Tightening bounds for Bayesian network structure learning. In Proceedings of the 28th AAAI Conference on Artificial Intelligence (AAAI-2014), Québec City, QC, Canada, 27–28 July 2014; pp. 2439–2445.
- Lin, X.; Shroff, N.B.; Srikant, R. A tutorial on cross-layer optimization in wireless networks. IEEE J. Sel. Areas Commun. 2006, 24, 1452–1463. [Google Scholar]
- Ibriq, J.; Mahgoub, I. Cluster-based routing in wireless sensor networks: Issues and challenges. SPECTS 2004, 10, 759–766. [Google Scholar]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 4–7 January 2000; pp. 1–10.
- Lmdsey, S.; Raghavendra, C.S. PEGASIS: Power-efficient gathering in sensor information systems. In Proceedings of the Aerospace Conference Proceedings, Big Sky, MT, USA, 9–16 March 2002; pp. 1125–1130.
- Harchi, S.; Georges, J.P.; Divoux, T. WSN dynamic clustering for oil slicks monitoring. In Proceedings of the 3rd International Conference on Wireless Communications in Unusual and Confined Areas, Clermont-Ferrand, France, 28–30 August 2012; pp. 1–6.
- Agre, J.; Clare, L. An integrated architecture for cooperative sensing networks. Computer 2000, 33, 106–108. [Google Scholar] [CrossRef]
- Pradhan, S.S.; Kusuma, J.; Ramchandran, K. Distributed compression in a dense micro sensor network. IEEE Signal Process. Mag. 2002, 19, 51–60. [Google Scholar]
- Sohrabi, K.; Gao, J.; Ailawadhi, V.; Pottie, G.J. Protocols for self organization of a wireless sensor network, IEEE Pers. Commun. 2000, 7, 16–27. [Google Scholar]
- Chu, M.; Haussecker, H.; Zhao, F. Scalable information-driven sensor querying and routing for Ad Hoc heterogeneous sensor networks. Int. J. High Perform. Comput. Appl. 2002, 16, 293–313. [Google Scholar] [CrossRef]
- Park, P.; Fischione, C.; Bonivento, A.; Johansson, K.H.; Sangiovanni-Vincent, A. Breath: An adaptive protocol for industrial control applications using wireless sensor networks. IEEE Trans. Mob. Comput. 2011, 10, 821–838. [Google Scholar] [CrossRef]
- Nakamura, M.; Sakurai, A.; Furubo, S.; Ban, H. Collaborative processing in Mote-based sensor/actuator networks for environment control application. Signal Process. 2008, 88, 1827–1838. [Google Scholar] [CrossRef]
- Chen, J.; Cao, X.; Cheng, P.; Xiao, Y.; Sun, Y. Distributed collaborative control for industrial automation with wireless sensor and actuator networks. IEEE Trans. Ind. Electron. 2010, 57, 4219–4230. [Google Scholar] [CrossRef]
- Lee, J.; Kwon, T.; Song, J. Group connectivity model for industrial wireless sensor networks. IEEE Trans. Ind. Electron. 2010, 57, 1835–1844. [Google Scholar]
- Hou, L.; Bergmann, N.W. Novel Industrial Wireless Sensor Networks for Machine Condition Monitoring and Fault Diagnosis. IEEE Trans. Instrum. Meas. 2012, 61, 965–974. [Google Scholar] [CrossRef]
- Naqvi, H.; Berber, S.; Salcic, Z. Energy efficient collaborative communication with imperfect phase synchronization and rayleigh fading in wireless sensor networks. Phys. Commun. 2010, 3, 119–128. [Google Scholar] [CrossRef]
- Snoussi, H.; Richard, C. Distributed Bayesian Fault diagnosis in Collaborative Wireless Sensor Networks. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM 2006), San Francisco, CA, USA, 27 November–1 December 2006; pp. 1–6.
- Bicakci, K.; Tavli, B. Prolonging network lifetime with multi-domain cooperation strategies in wireless sensor networks. Ad Hoc Netw. 2010, 8, 582–596. [Google Scholar] [CrossRef]
- Pan, Q.; Wei, J.; Liu, H.; Hu, M. Virtual field strategy for collaborative signal and information processing in wireless heterogeneous sensor networks. Comput. Netw. 2008, 52, 3148–3168. [Google Scholar] [CrossRef]
- Wu, J.; Yuan, S.; Ji, S.; Zhou, G.; Wang, Y.; Wang, Z. Multi-agent system design and evaluation for collaborative wireless sensor network in large structure health monitoring. Expert Syst. Appl. 2010, 37, 2028–2036. [Google Scholar] [CrossRef]
- Kalpakis, K.; Tang, S. Collaborative data gathering in wireless sensor networks using measurement co-occurrence. Comput. Commun. 2008, 31, 1979–1992. [Google Scholar] [CrossRef]
- Wei, W.; Yong, Q. Information potential fields navigation in wireless Ad-Hoc sensor networks. Sensors 2011, 11, 4794–4807. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Wang, S. Collaborative signal processing for target tracking in distributed wireless sensor networks. J. Parallel Distrib. Comput. 2007, 67, 501–515. [Google Scholar] [CrossRef]
- Zia, H.; Harris, N.R.; Merrett, G.V.; Rivers, M.; Coles, N. The impact of agricultural activities on water quality: A case for collaborative catchment-scale management using integrated wireless sensor networks. Comput. Electron. Agric. 2013, 98, 126–138. [Google Scholar] [CrossRef]
- Fan, X.; Yuan, C. An Improved Lower Bound for Bayesian Network Structure Learning. In Proceedings of the 29th AAAI Conference on Artificial Intelligence (AAAI-2015), Austin, TX, USA, 25–30 January 2015; pp. 2439–2445.
- Tashtoush, Y.M.; Okour, M.A. Fuzzy Self-Clustering for Wireless Sensor networks. In Proceedings of the 2008 IEEE/IFIP International Conference on Embedded and Ubiquitous Computing, Shanghai, China, 17–20 December 2008; pp. 223–229.
- Kim, J.; Park, S.; Han, Y.; Chung, T. CHEF: Cluster Head Election mechanism using Fuzzy logic in Wireless Sensor Networks. In Proceedings of the 10th International Conference on Advanced Communication Technology (ICACT 2008), Gangwon-Do, Korea, 17–20 February 2008; pp. 654–659.
- Zairi, S.; Zouari, B.; Niel, E.; Dumitrescu, E. Nodes self-scheduling approach for maximizing WSN lifetime based on remaining energy. Inst. Eng. Technol. 2012, 2, 52–62. [Google Scholar]
- Chamodrakas, I.; Martakos, D. A utility-based fuzzy TOPSIS method for energy efficient network selection in heterogeneous wireless networks. Appl. Soft Comput. 2012, 12, 1929–1938. [Google Scholar] [CrossRef]
- Azad, P.; Sharma, V. Cluster head Selection using multiple attribute decision making (MADM) approach in wireless sensor networks. In Quality, Reliability, Security and Robustness in Heterogeneous Networks; Springer Berlin Heidelberg: Berlin, Germany, 2013; Volume 115, pp. 141–154. [Google Scholar]
- Radoi, I.E.; Shenoy, A.; Arvind, D.K. Evaluation of routing protocols for internet-enabled wireless sensor networks. In Proceedings of the Eighth International Conference on Wireless and Mobile Communications (ICWM 2012), Venice, Italy, 24–29 June 2012; pp. 56–61.
- Aslam, N.; Philips, W.; Robertson, W.; Sivakumar, S. A multi-criterion optimization technique for energy efficient cluster formation in wireless sensor networks. Inf. Fusion 2011, 12, 202–212. [Google Scholar] [CrossRef]
- Gupta, G.P.; Misra, M.; Garg, K. Energy and trust aware mobile agent migration protocol for dataaggregation in wireless sensor networks. J. Netw. Comput. Appl. 2014, 41, 300–311. [Google Scholar] [CrossRef]
- Chao, C.-M.; Hsiao, T.-Y. Design of structure-free and energy-balanced data aggregation inwireless sensor networks. J. Netw. Comput. Appl. 2014, 37, 229–239. [Google Scholar] [CrossRef]
- Wu, O.; Hu, W.; Maybank, S.J.; Zhu, M. Efficient clustering aggregation based on data fragments. IEEE Trans. Syst Man Cybern. Part B: Cybern. 2012, 42, 913–926. [Google Scholar] [CrossRef] [PubMed]
- Liu, P.; Huang, T.; Zhou, X.; Wu, G. An improved energy efficient unequal clustering algorithm of wireless sensor network. In Proceedings of the 6th International Conference on Intelligent Computing and Integrated Systems (ICISS), Guilin, China, 22–24 October 2010; pp. 930–933.
- Jaichandran, R.; Irudhayara, A.A.; Raja, J.E. Effective strategies and optimal solutions for hot spot problem in wireless sensor networks. In Proceedings of the 10th International Conference on Information Sciences Signal Processing and their Applications (ISSPA), Kuala Lumpur, Malaysia, 10–13 May 2010; pp. 1012–1023.
- Darabkh, K.A.; Ismail, S.S.; Al-Shurman, M.; Jafar, I.F.; Alkhader, E.; Al-Mistarihi, M.F. Performance evaluation of selective and adaptive heads clustering algorithms over wireless sensor networks. J. Netw. Comput. Appl. 2012, 35, 2068–2080. [Google Scholar] [CrossRef]
- Viani, F.; Salucci, M.; Rocca, P.; Oliveri, G.; Massa, A. A multi-sensor wsn backbone for museum monitoring and surveillance. In Proceedings of the 2012 6th European Conference on Antennas and Propagation (EUCAP), Prague, Czech Republic, 26–30 March 2012; pp. 51–52.
- Xiao, Y.; Chen, H.; Wu, K.; Sun, B.; Zhang, Y.; Sun, X.; Liu, C. Coverage and detection of a randomized scheduling algorithm in WSNs. IEEE Trans. Comput. 2010, 59, 507–521. [Google Scholar] [CrossRef]
- Jeong, J.; Sharafkandi, S.; Du, D.H. Energy-aware scheduling with quality of surveillance guarantee in wireless sensor networks. In Proceedings of the ACM Workshop on Dependability Issues in Wireless Ad Hoc Networks and Sensor Networks (DIWANS’06), New York, NY, USA, 26–30 May 2006.
- Zou, Q.; Zhou, J.Z.; Zhou, C.; Song, L.X.; Guo, J. Comprehensive flood risk assessment based on set pair analysis-variable fuzzy sets model and fuzzy AHP. Stock. Environ. Res. Risk Assess. 2013, 27, 525–546. [Google Scholar] [CrossRef]
- Guo, Y.; Kong, F.; Zhu, D.; Tosun, A.S.; Deng, Q. Sensor placement for lifetime maximization in monitoring oil pipelines. In Proceedings of the 1st ACM/IEEE International Conference on Cyber-Physical Systems, Stockholm, Sweden, 12–15 April 2010; pp. 61–68.
- Ravanbod, H. Application of neuro-fuzzy techniques in oil pipeline ultrasonic nondestructive testing. NDT&E Int. 2005, 38, 643–653. [Google Scholar]
- Azevedo, C.R.F. Failure analysis of a crude oil pipeline. Eng. Failure Anal. 2007, 14, 978–994. [Google Scholar] [CrossRef]
- Saipulla, A.; Westphal, C.; Liu, B.; Wang, J. Barrier coverage of line-based deployed wireless sensor networks. In Proceedings of the IEEE INFOCOM, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 127–135.
- Hussain, S.I.; Hasnab, M.O.; Alouini, M.S. Performance analysis of selective cooperation with fixed gain relays in Nakagami-m channels. Phys. Commun. 2012, 5, 272–279. [Google Scholar] [CrossRef]
- Miao, G.; Himayat, N.; Li, G.; Swami, A. Cross-layer optimization for energy-efficient wireless communications: A survey. Wirel. Commun. Mob. Comput. 2009, 9, 529–542. [Google Scholar] [CrossRef]
- Chatterjee, M.; Das, S.K.; Turgut, D. WCA: A weighted clustering algorithm for mobile Ad Hoc networks. Cluster Comput. 2002, 5, 193–204. [Google Scholar] [CrossRef]
- Mastronarde, N.; Schaar, M.V.D. Fast reinforcement learning for energy-efficient wireless communication. IEEE Trans. Signal Process. 2011, 59, 6262–6266. [Google Scholar] [CrossRef]
- Gungor, O.; Tan, J.; Koksal, C.E.; Gamal, H.E.; Shroff, N.B. Joint power and secret key queue management for delay limited secure communication. In Proceedings of the IEEE INFOCOM, San Diego, CA, USA, 14–19 March 2010.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. Item | Parameter Description | Value |
|---|---|---|
| 1 | Communication range | 100 × 100 |
| 2 | Location of the base station | (150, 50) |
| 3 | Node number | 100 |
| 4 | Initial energy range | [5,10] Joule |
| 5 | Work time period | 0.1 s |
| 6 | Packet size | 500 bytes |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, C.; Shokla, S.K.; Modhawar, G.; Wang, Q. An Effective Collaborative Mobile Weighted Clustering Schemes for Energy Balancing in Wireless Sensor Networks. Sensors 2016, 16, 261. https://doi.org/10.3390/s16020261
Tang C, Shokla SK, Modhawar G, Wang Q. An Effective Collaborative Mobile Weighted Clustering Schemes for Energy Balancing in Wireless Sensor Networks. Sensors. 2016; 16(2):261. https://doi.org/10.3390/s16020261
Chicago/Turabian StyleTang, Chengpei, Sanesy Kumcr Shokla, George Modhawar, and Qiang Wang. 2016. "An Effective Collaborative Mobile Weighted Clustering Schemes for Energy Balancing in Wireless Sensor Networks" Sensors 16, no. 2: 261. https://doi.org/10.3390/s16020261