
A Localization Method for Underwater Wireless Sensor Networks Based on Mobility Prediction and Particle Swarm Optimization Algorithms




Abstract
:1. Introduction
2. Related Works

3. MP-PSO Localization Method
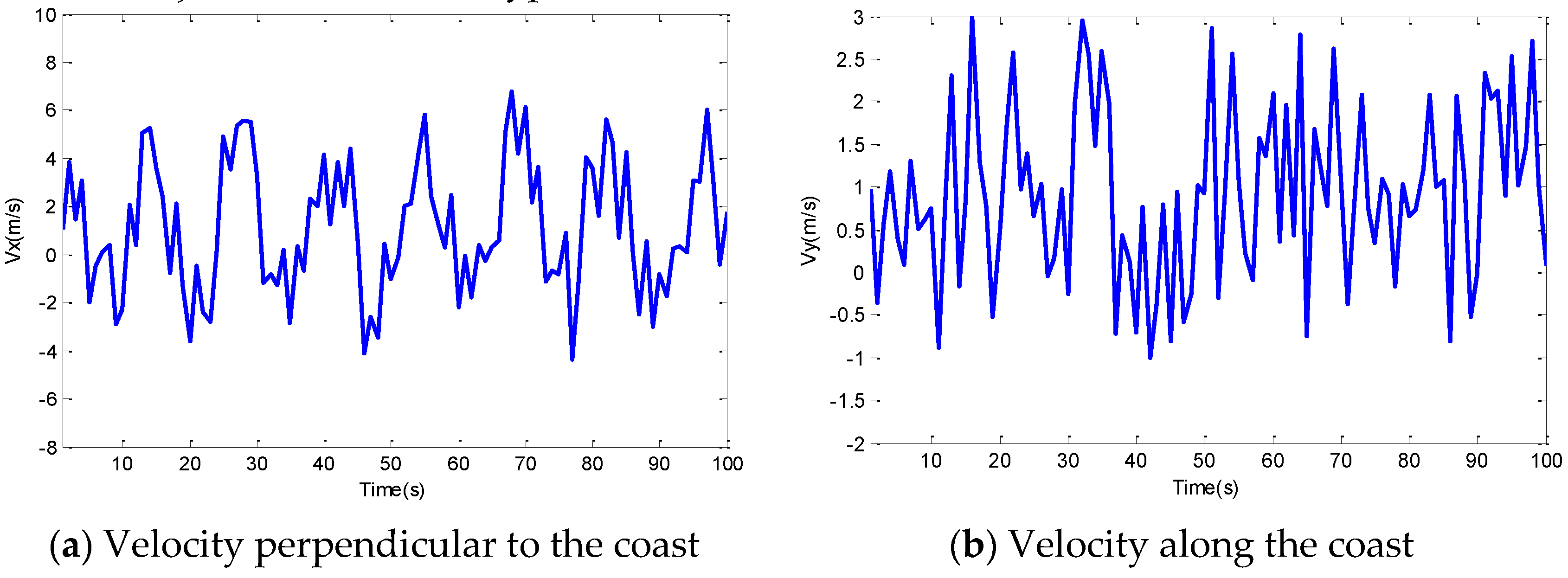
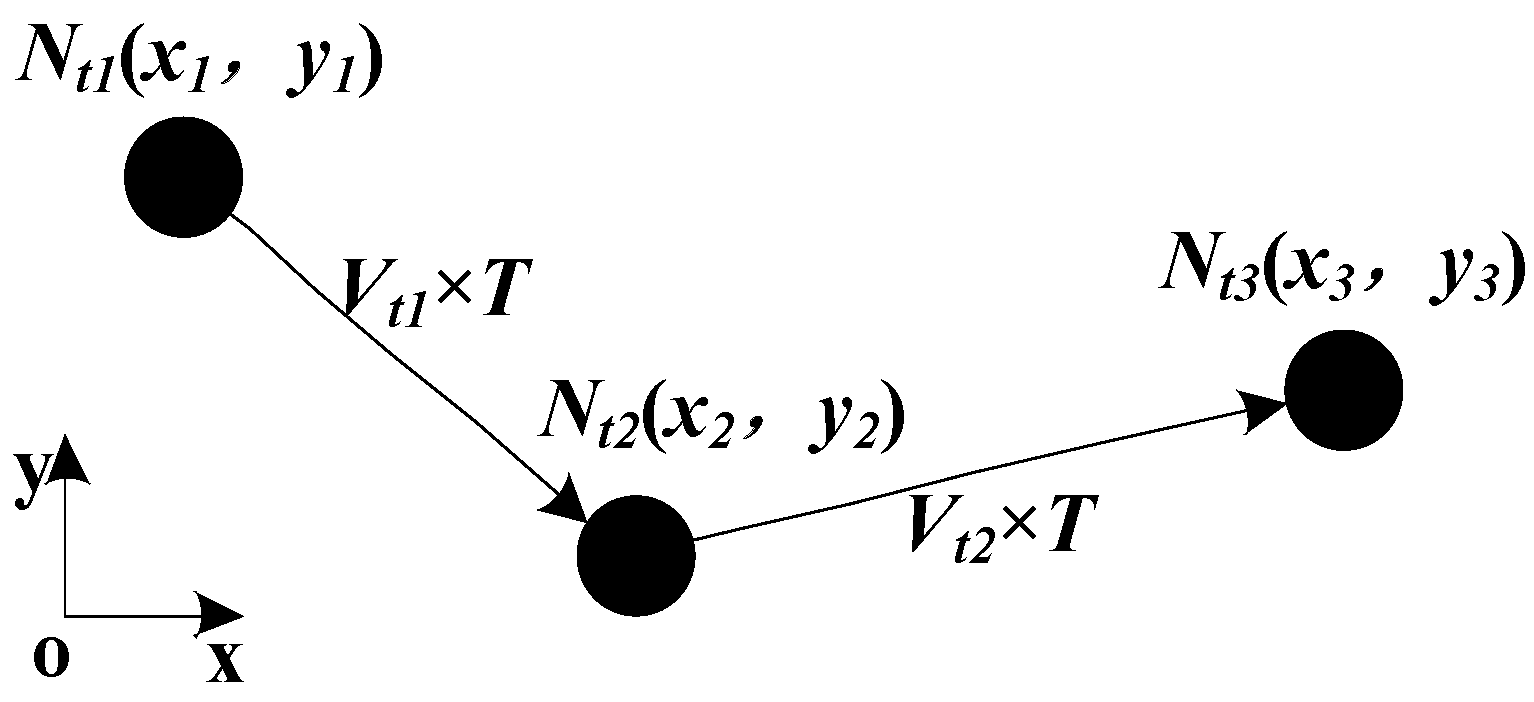
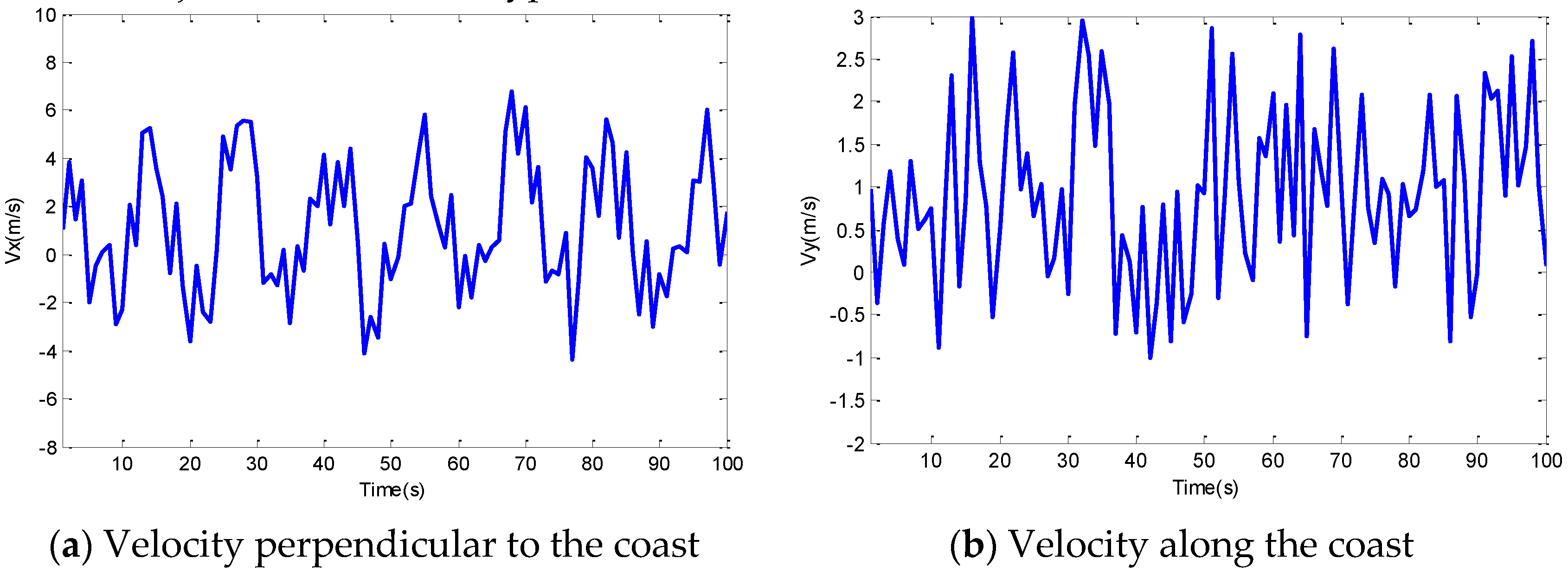
3.1. The Node Mobility Model
3.2. Propagation Loss Model for Submarine Sound Signal
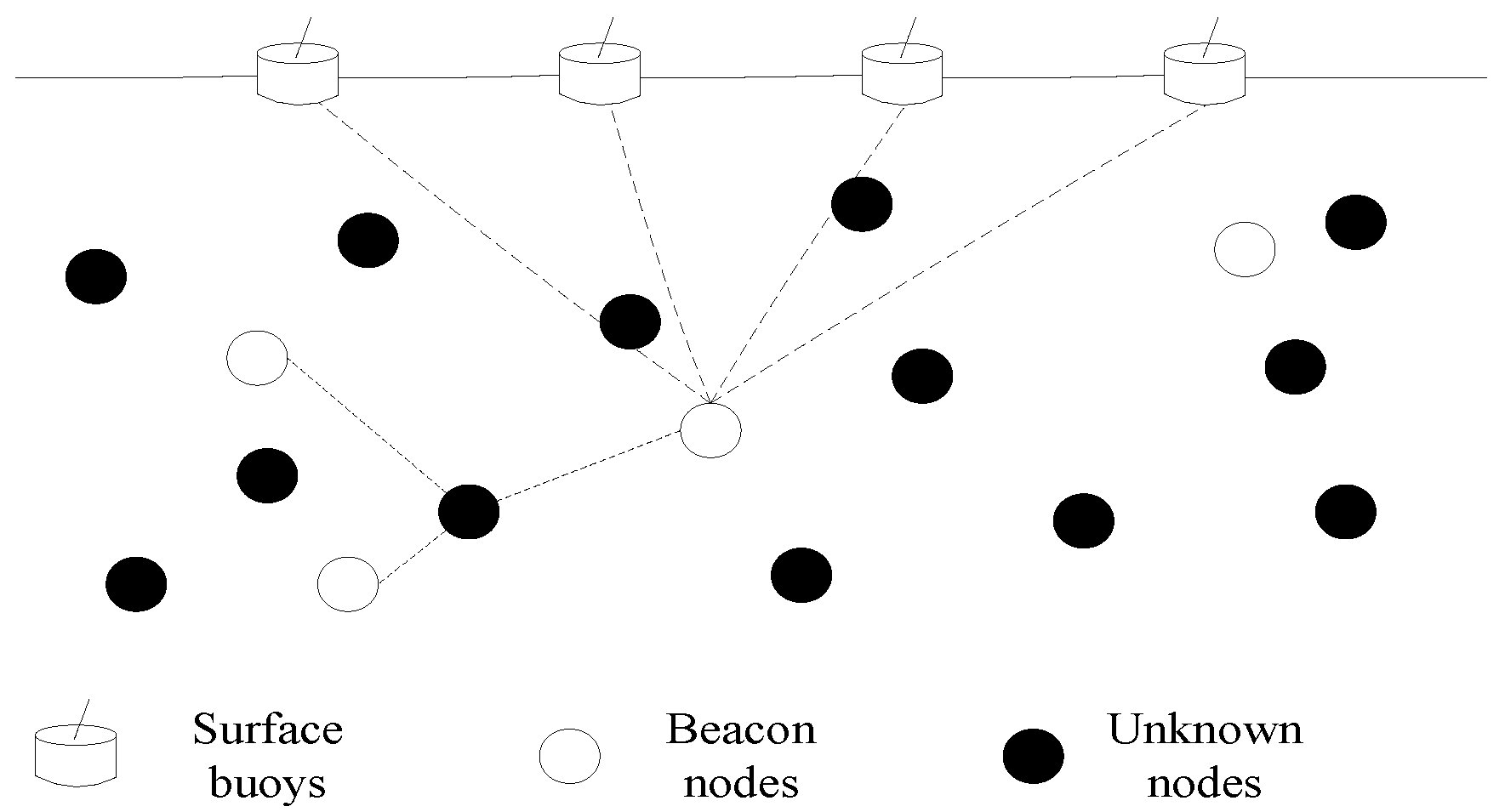
3.3. Localization of Beacon Nodes
- Step 1:
- Initialize the population. The number of particles is Pnum. Calculate the fitness of each particle in Equation (6). The individual extremum is denoted as Pit, and the global extremum is denoted as Pgt.where, H is the number of effective buoys, (x, y) is the two-dimensional coordinate of beacon node, (xi, yi) is the coordinate of buoy, and li is the distance from this beacon node to every buoy.
- Step 2:
- Calculate the inertia weight with Equation (7), and update the position and velocity with Equations (8) and (9).where, t is the iterations, c1 and c2 are the learning factors. r1 and r2 are the random numbers uniformly distributed in (0,1). and are the evolutions of a particle towards the local optimum and global optimum, respectively, and they can be regarded as the variation of velocity updated by theparticle in this iteration.
- Step 3:
- Calculate the fitness of each particle and get the average fitness, then update the individual extremum and the global extremum . Eliminate the particles whose fitness is larger than double average fitness.
- Step 4:
- Judge whether it satisfies the condition: Pgt < ε (ε is the threshold of position error) or t = tmax. If one of the condition is satisfied, turn to Step 5, or t = t + 1, and turn to Step 2.
- Step 5:
- Output the global optimal solution, and get the coordinates of the beacon nodes.
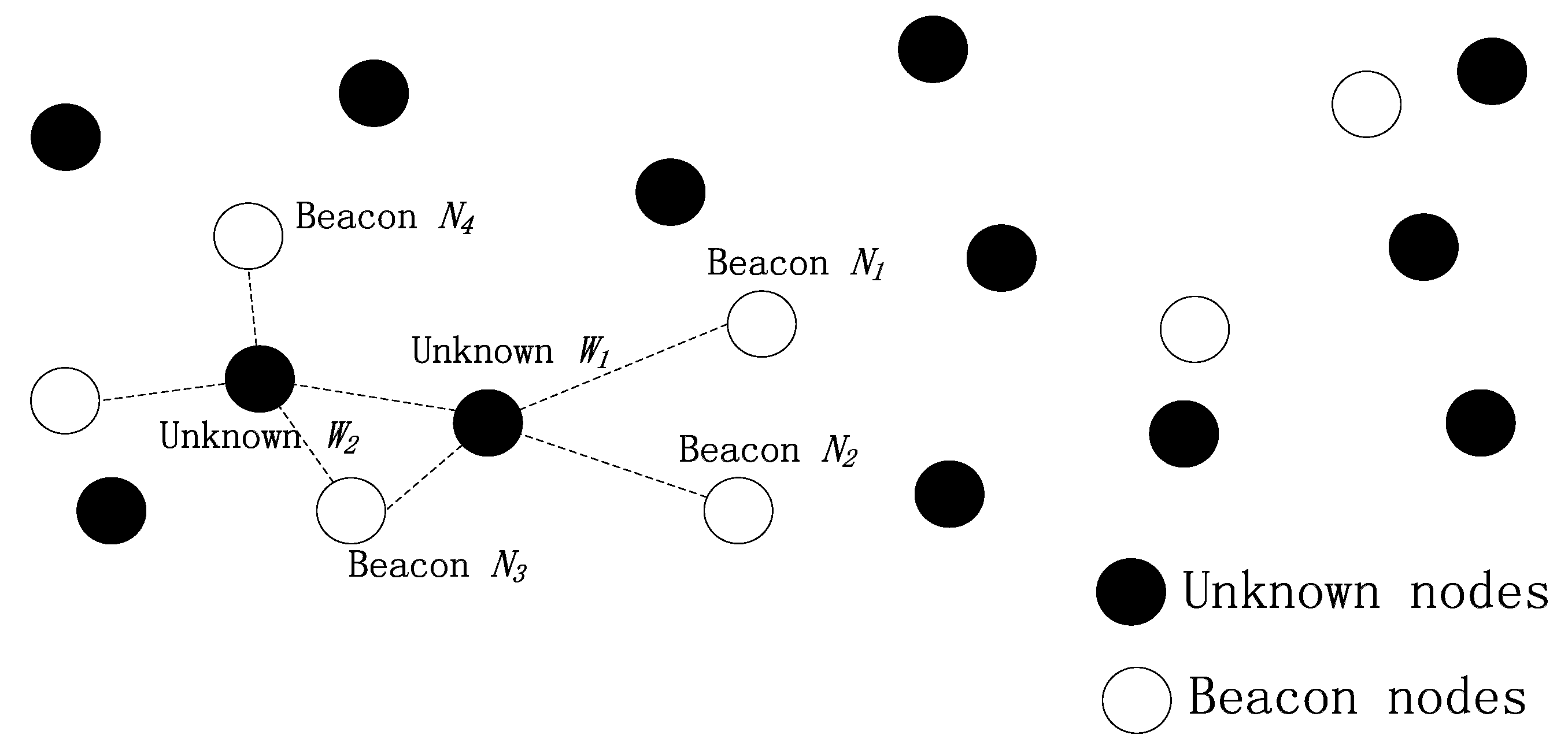
3.4. Localization of Unknown Nodes
3.4.1. The Calculation of Beacon Nodes’ Velocity
3.4.2. The Calculation of Unknown Nodes’ Velocity
3.4.3. Updating of Unknown Nodes’ Location
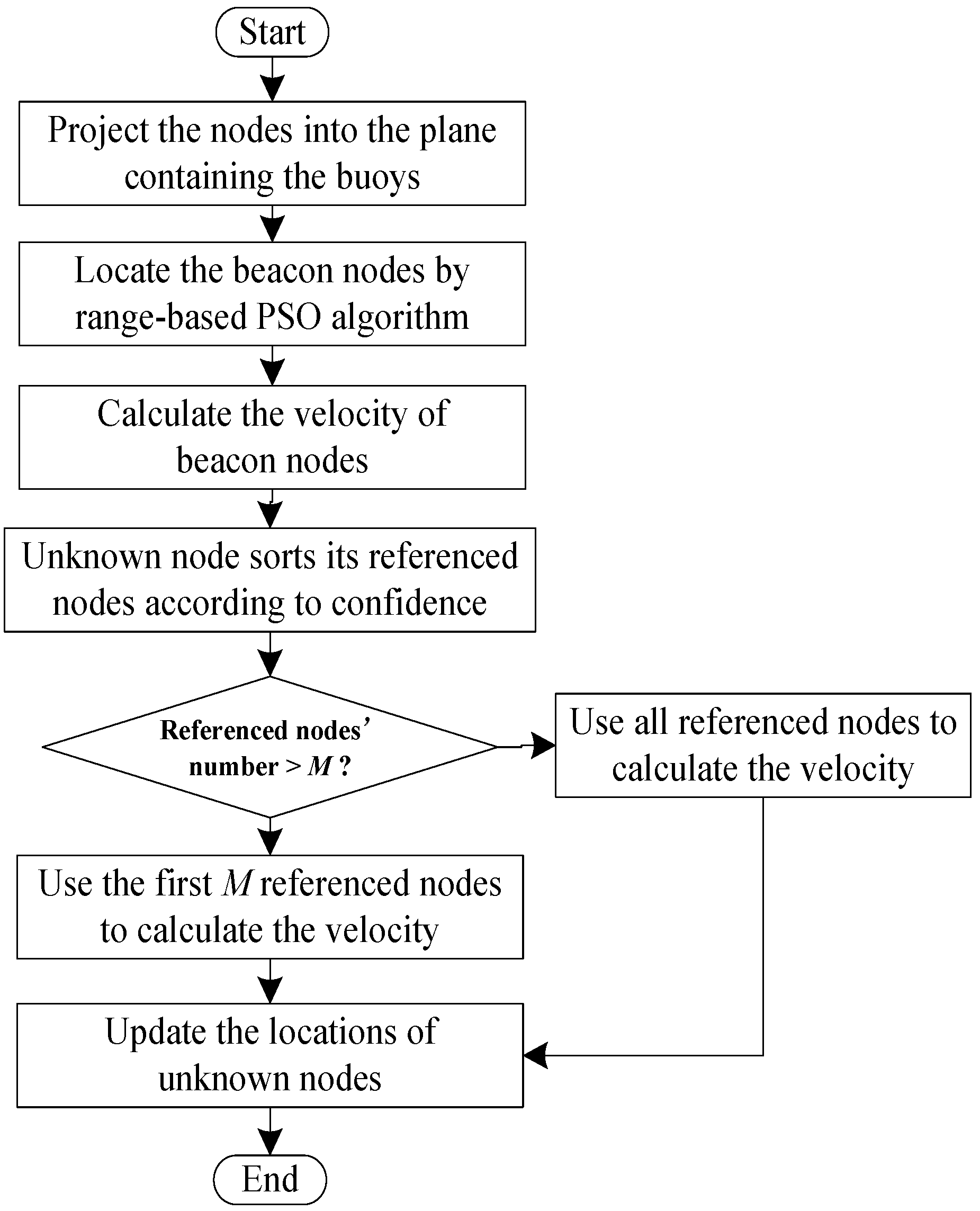
3.5. The Process of MP-PSO Method
- Step 1:
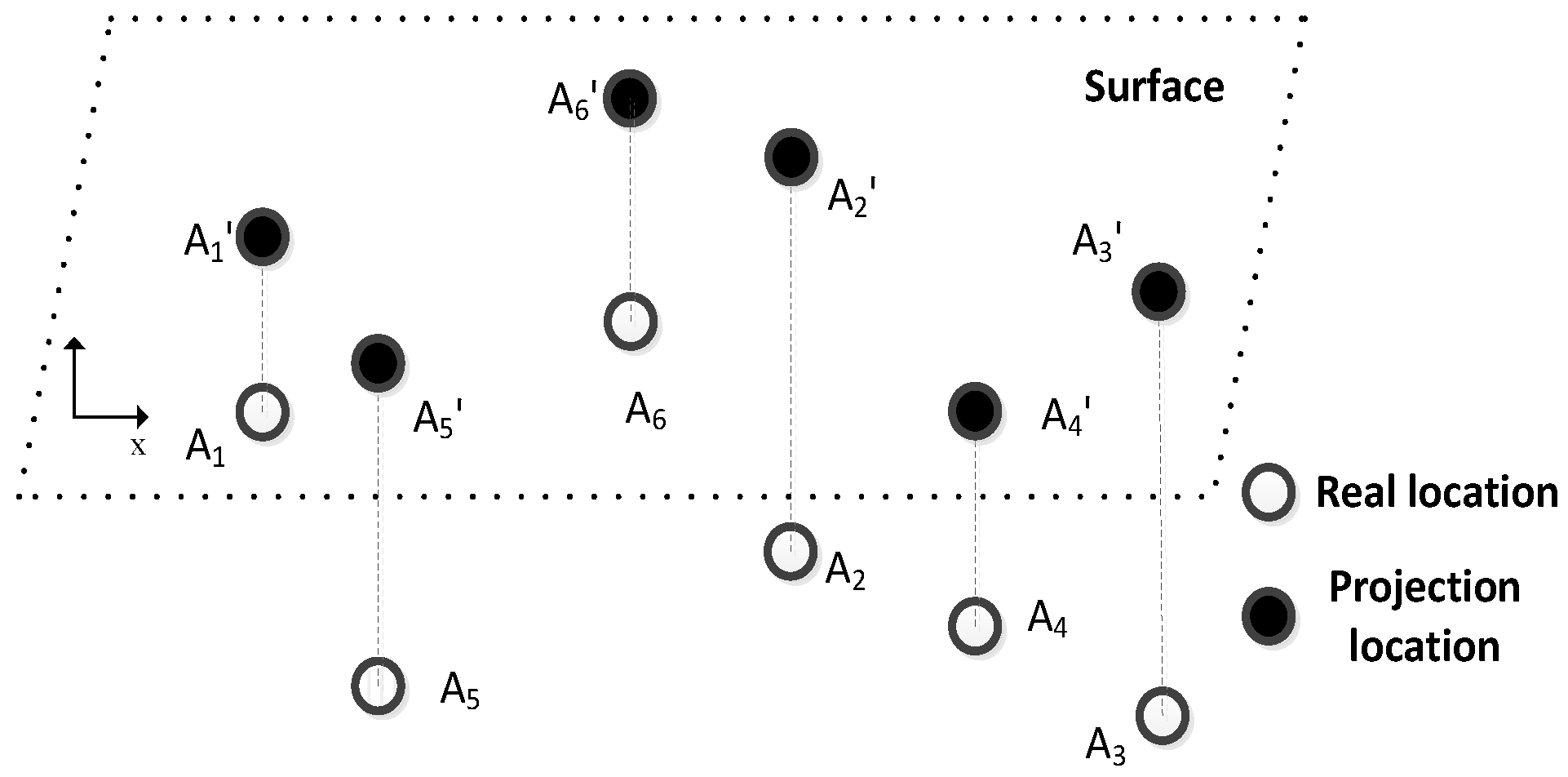
- Project the nodes into the plane which contains the surface buoys, and transform the three-dimensional localization problem into a two-dimensional localization.
- Step 2:
- Locate the beacon nodes by using the range-based PSO algorithm.
- Step 3:
- Calculate the velocity of beacon nodes according to the localization results at two instants.
- Step 4:
- The unknown nodes sort their reference nodes in descending order according to the confidence value.
- Step 5:
- If the number of reference nodes is more than M, then select the M reference nodes with larger confidence coefficients to calculate the velocity, if not, use all the reference nodes to calculate the velocity.
- Step 6:
- Update the locations of the unknown nodes.
4. Simulations and Analysis
4.1. Parameter Setting

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values Setting |
|---|---|
| Deployment range | 1000 m × 1000 m |
| Localization period | 1 s |
| Communication radius of beacon nodes | 200 m |
| Communication radius of unknown nodes | 100 m |
| Transmission power | 2 W(33 dBm) |
| Transmission frequency | 50 kHz |
| Attenuation coefficient | 2 |
| Buoy number | 20 |
| Node number | 200 |
| v | N(1,(0.1)2) |
| k1,k2 | N(π,(0.1π)2) |
| λ | N(3,(0.3)2) |
| K3 | N(2π,(0.2π)2) |
| K4,k5 | N(1,(0.1)2) |
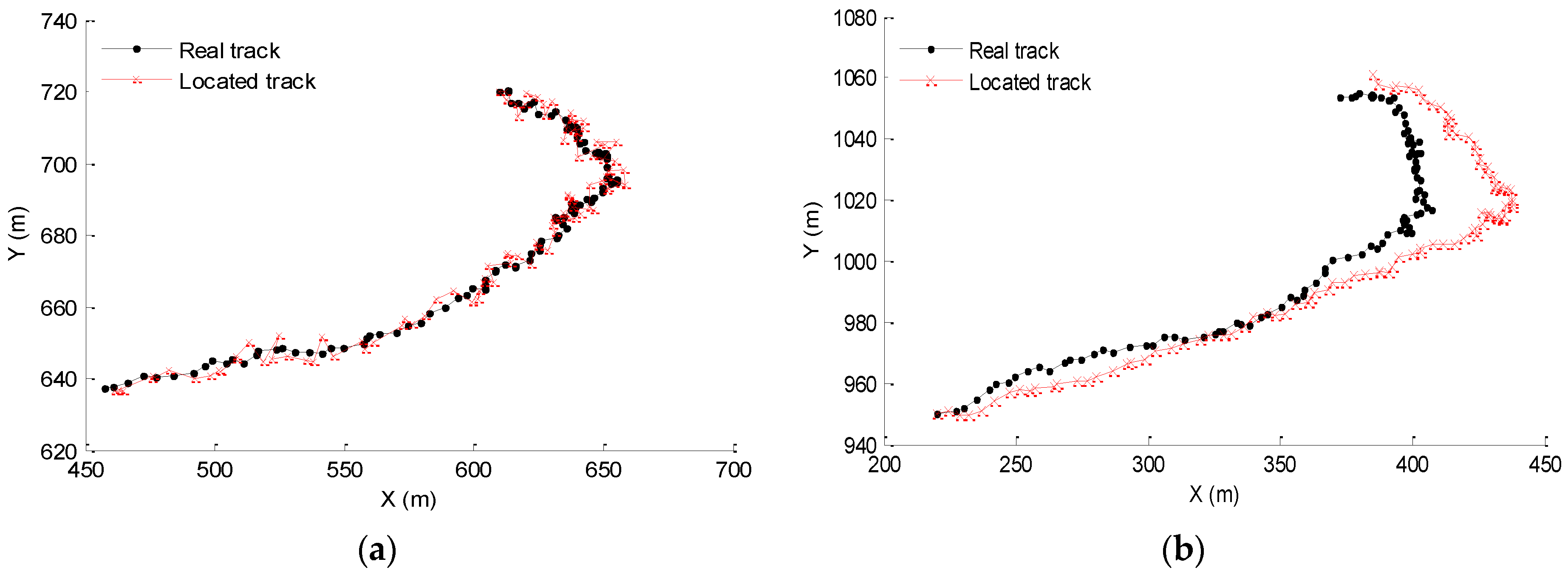
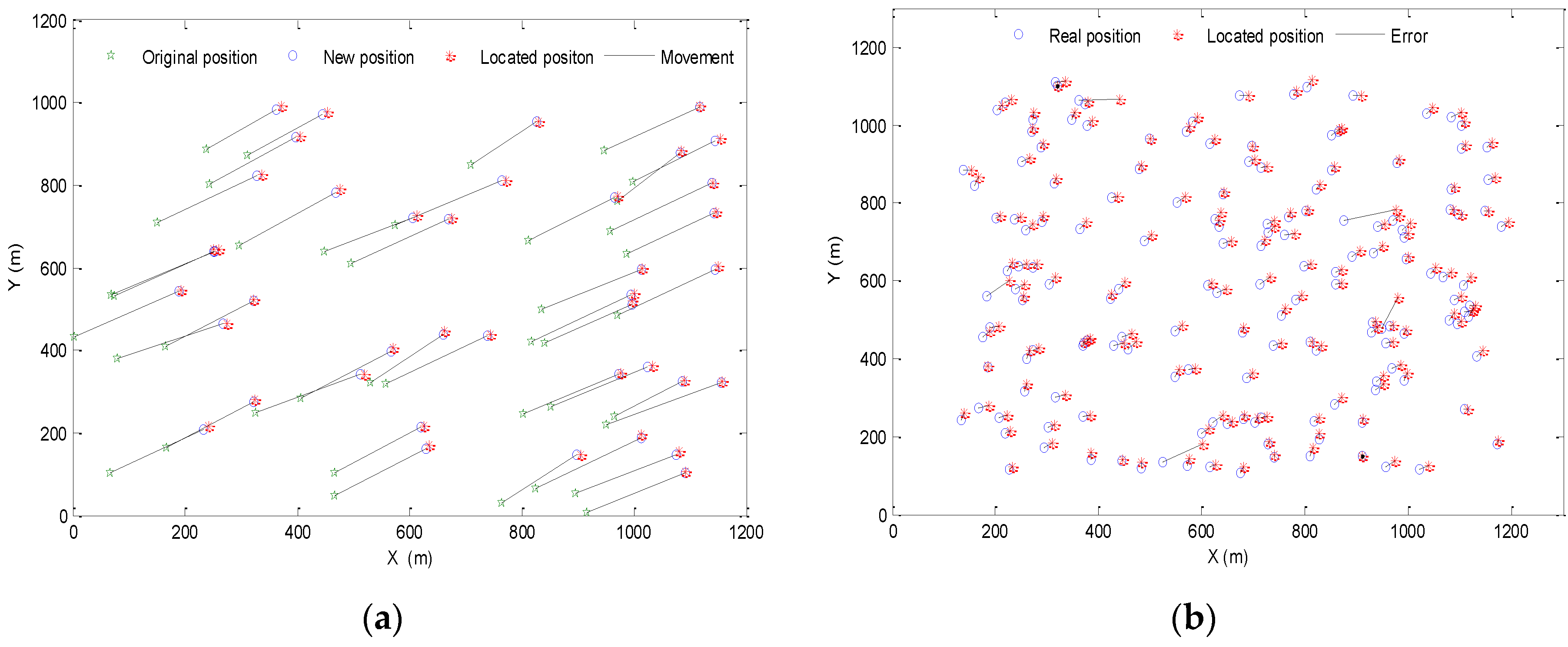
4.2. Localization Results

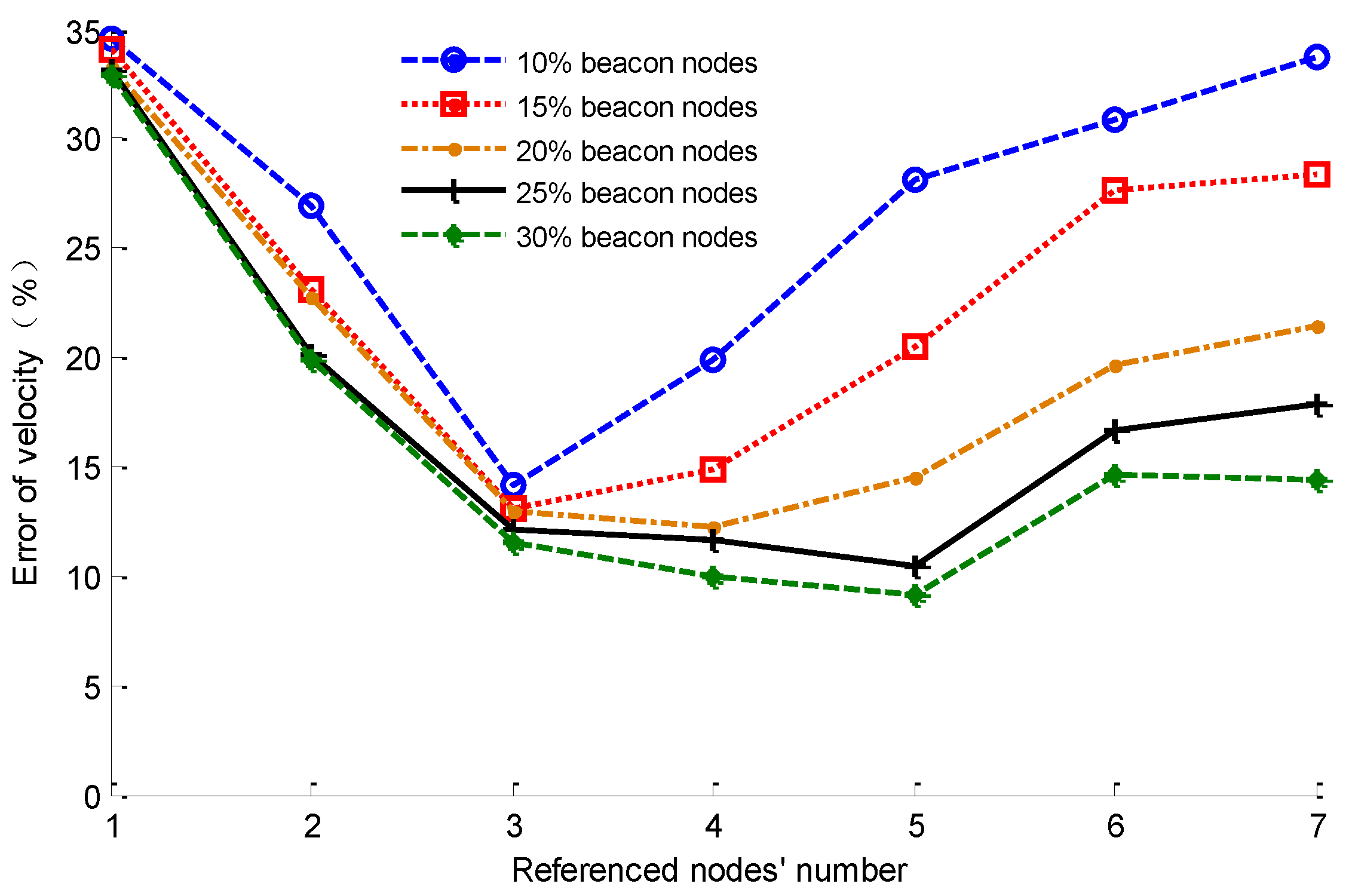
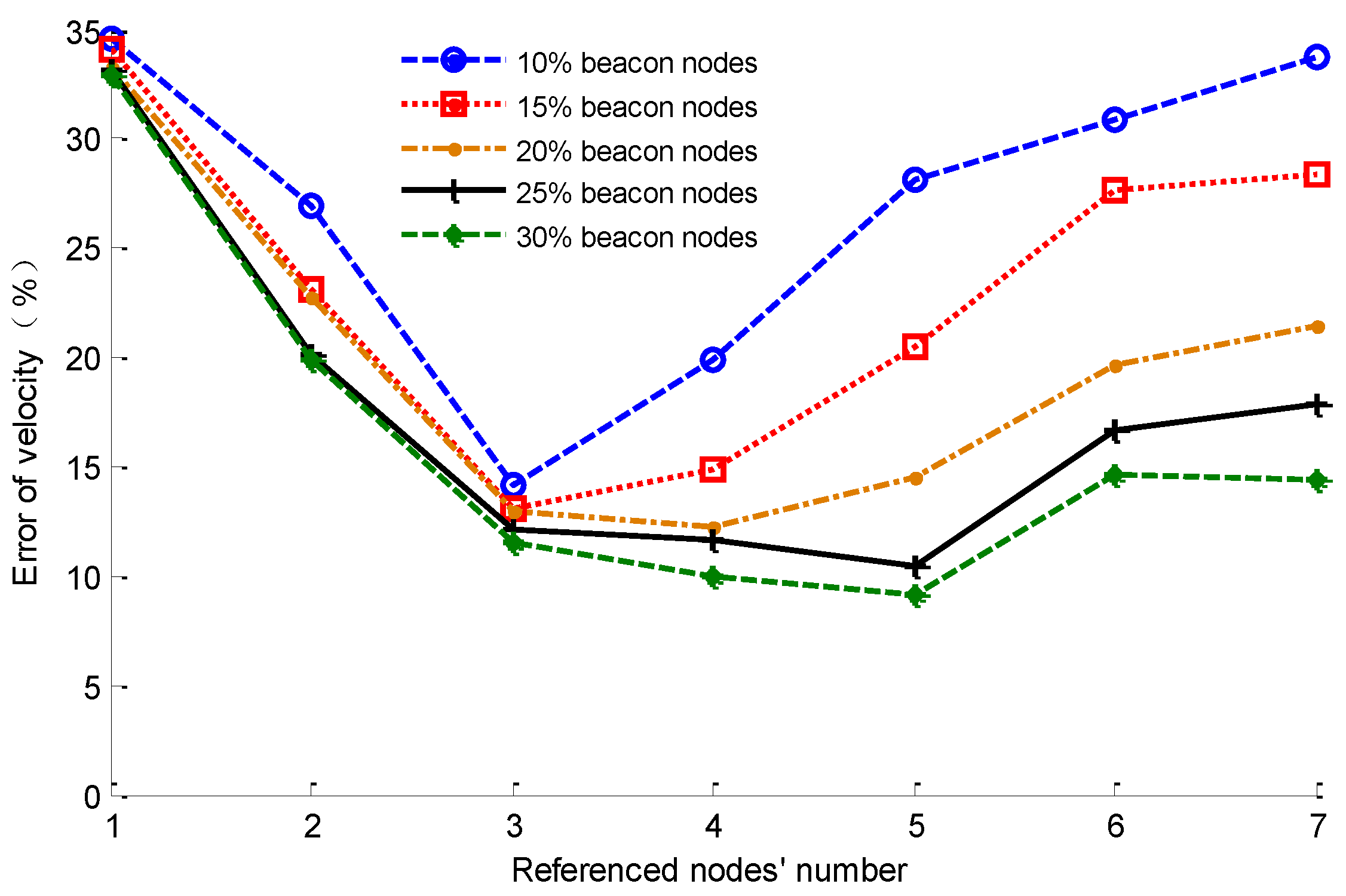
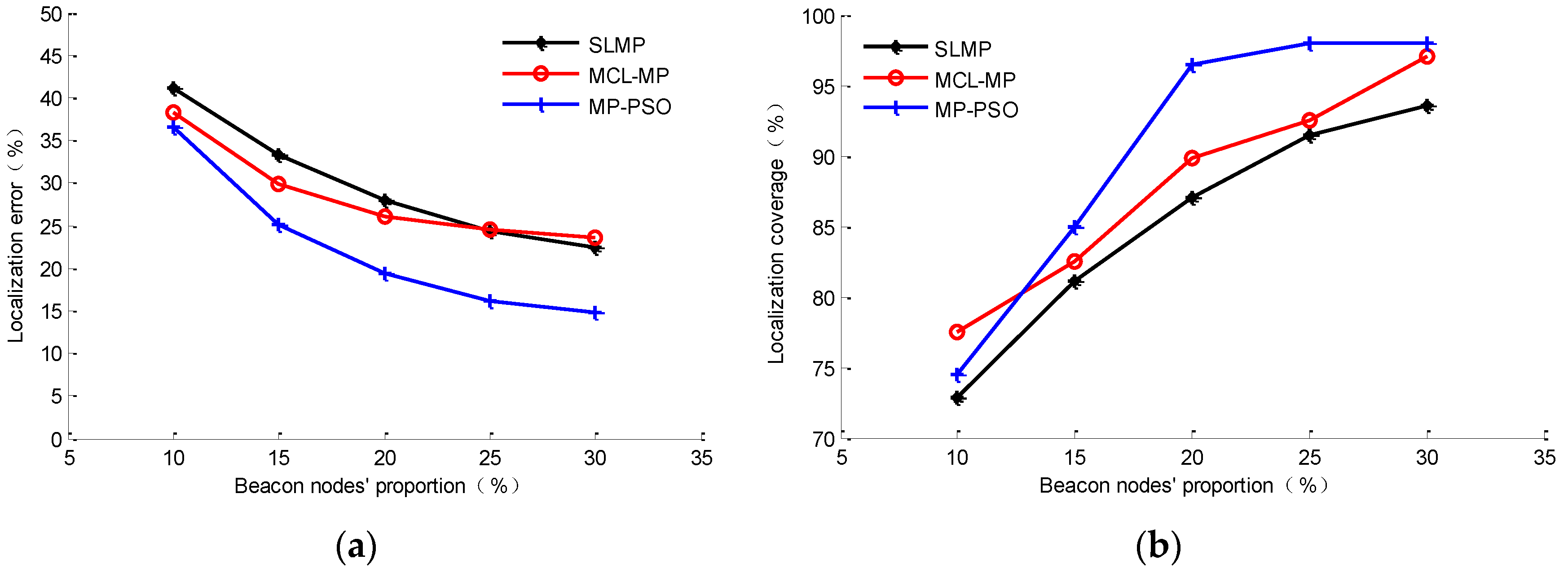
4.3. Impacts of Beacon Nodes’ Proportion on Localization Results
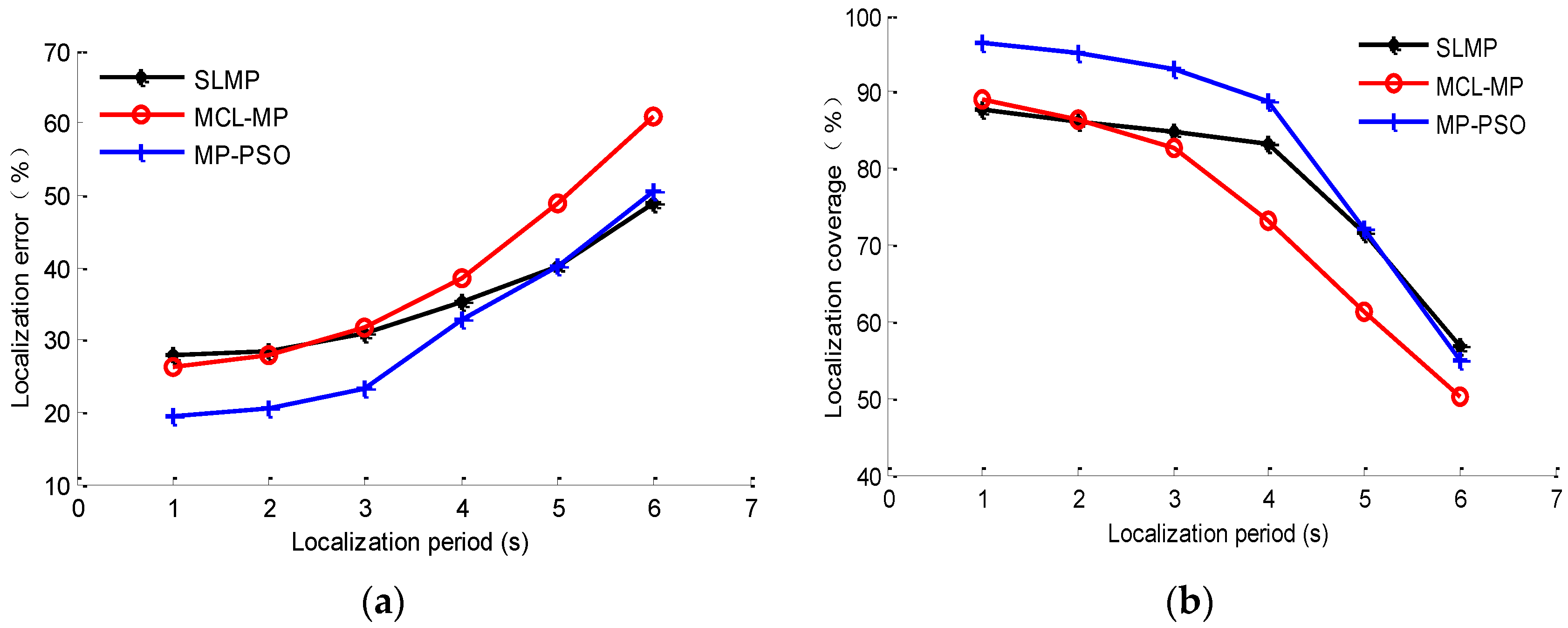
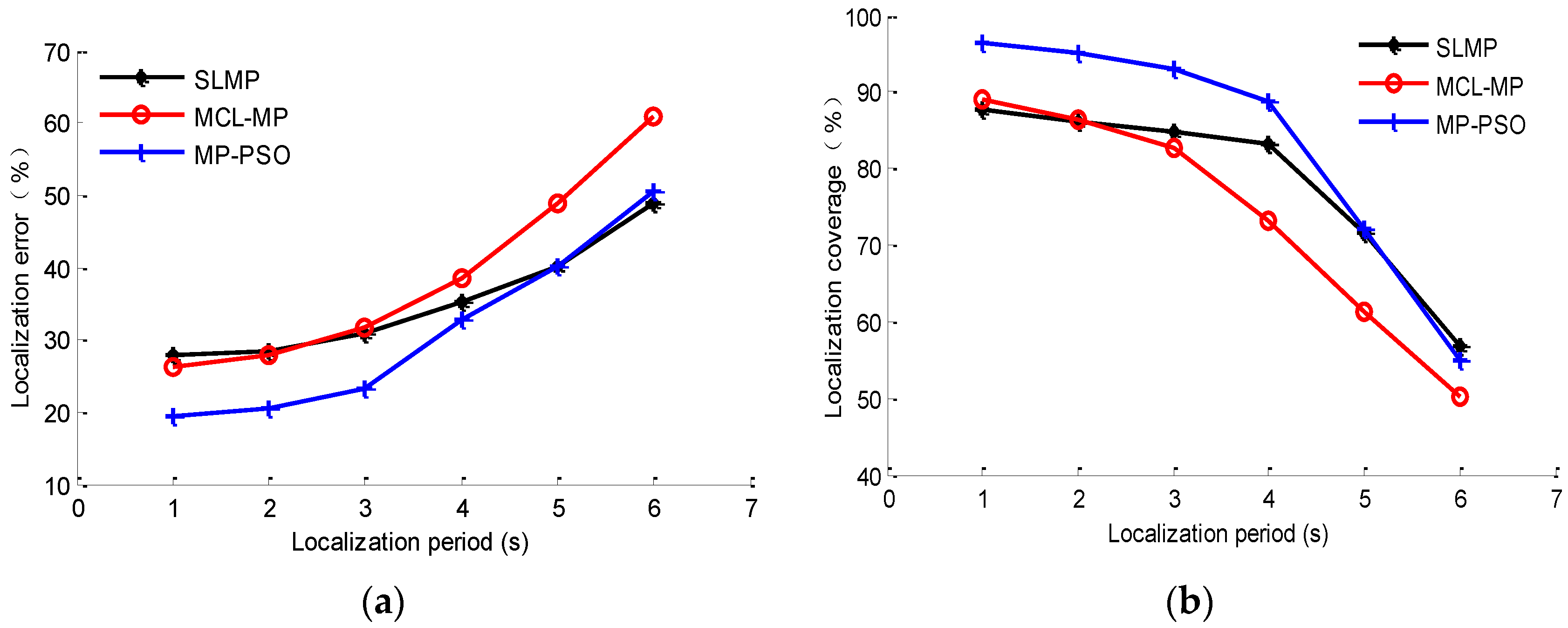
4.4. Impacts of Localization Period T on Localization Results
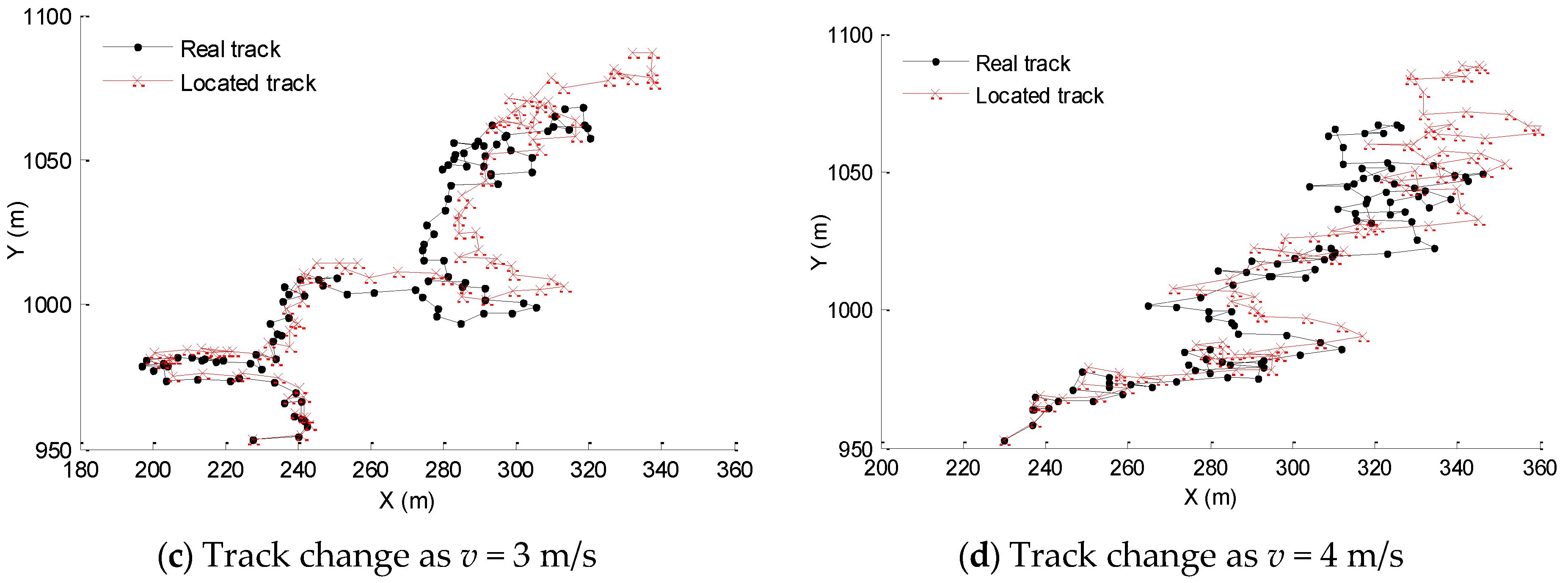
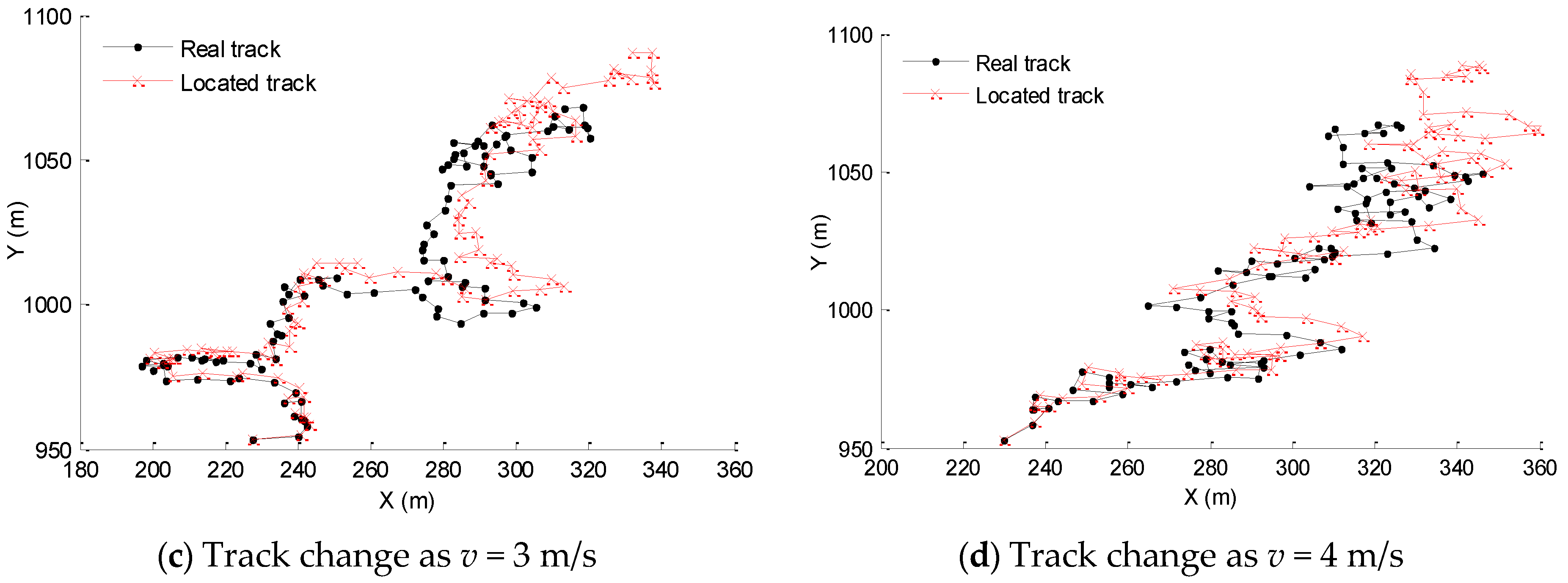
4.5. Impacts of Nodes’ Velocity v on Localization Results

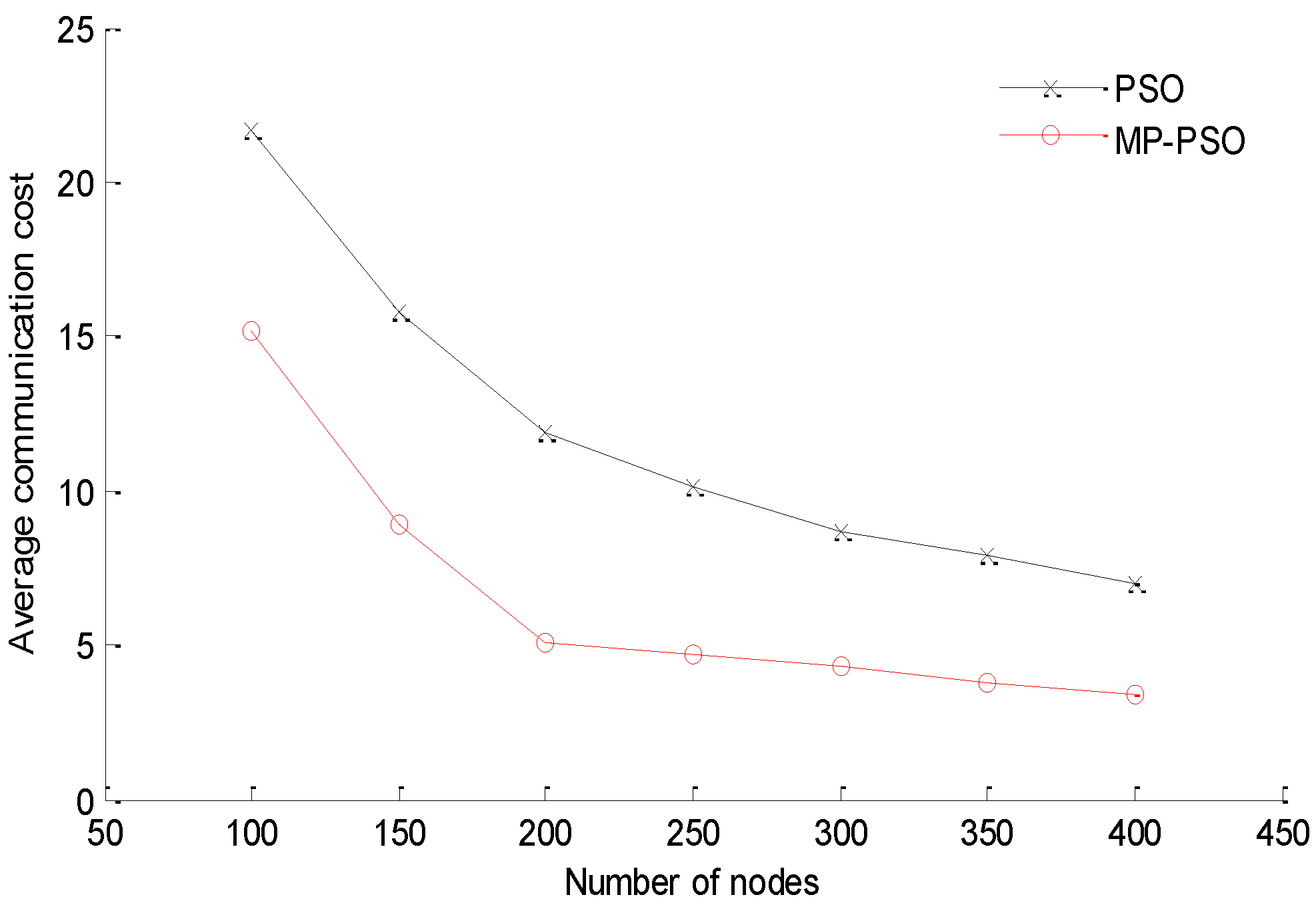
4.6. Analysis of the Energy Consumption
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater sensor networks: applications, advances and challenges. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2012, 370, 158–175. [Google Scholar] [CrossRef] [PubMed]
- Javaid, N.; Jafri, M.R.; Khan, Z.A.; Alrajeh, N.; Imran, M.; Vasilakos, A. Chain-based communication in cylindrical underwater wireless sensor networks. Sensors 2015, 15, 3625–3649. [Google Scholar] [CrossRef] [PubMed]
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater acoustic wireless sensor networks: advances and future trends in physical, MAC and routing layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Gao, H.; Wang, W.; Chang, S.; Chen, J. Color filtering localization for three-dimensional underwater acoustic sensor networks. Sensors 2015, 15, 6009–6032. [Google Scholar] [CrossRef] [PubMed]
- Beniwal, M.; Singh, R. Localization techniques and their challenges in underwater wireless sensor networks. Int. J. Comput. Sci. Inf. Technol. 2014, 5, 4706–4710. [Google Scholar]
- Krishna, C.R.; Yadav, P.S. A hybrid localization scheme for underwater wireless sensor networks. In Proceedings of the IEEE 2014 International Conference on Issues and Challenges in Intelligent Computing Techniques (ICICT), Ghaziabad, India, 7–8 February 2014; pp. 579–582.
- Erol-Kantarci, M.; Mouftah, H.T.; Oktug, S. A survey of architectures and localization techniques for underwater acoustic sensor networks. IEEE Commun. Surv. Tutor. 2011, 13, 487–502. [Google Scholar] [CrossRef]
- AlHajri, M.I.; Goian, A.; Darweesh, M.; AlMemari, R.; Shubair, R.M.; Weruaga, L.; Kulaib, A.R. Hybrid RSS-DOA technique for enhanced WSN localization in a correlated environment. In Proceedings of the 2015 IEEE International Conference on Information and Communication Technology Research (ICTRC), Abu Dhabi, United Arab Emirates, 17–19 May 2015; pp. 238–241.
- El Assaf, A.; Zaidi, S.A.R.; Affes, S.; Kandil, N. Range-free localization algorithm for heterogeneous wireless sensor networks. In Proceedings of the 2014 IEEE Wireless Communications and Networking Conference (WCNC), Istanbul, Turkey, 69 April 2014; pp. 2805–2810.
- Hu, L.; Evans, D. Localization for mobile sensor network. In Proceedings of the ACM 10th annual international conference on Mobile computing and networking, Philadelphia, PA, USA, 26 September–1 October 2004; pp. 45–57.
- Soltaninasab, B.; Sabaei, M.; Amiri, J. Improving Monte Carlo localization algorithm using time series forecasting method and dynamic sampling in mobile WSNs. In Proceedings of the 2010 Second International Conference on Communication Systems, Networks and Applications, Hong Kong, China, 29 June–1 July 2010; pp. 389–396.
- Alcocer, A.; Oliveira, P.; Pascoal, A. Study and implementation of an EKF GIB-based underwater positioning system. Control Eng. Pract. 2007, 15, 689–701. [Google Scholar] [CrossRef]
- Cheng, X.; Shu, H.; Liang, Q.; Du, D.H.C. Silent positioning in underwater acoustic sensor networks. IEEE Trans. Veh. Technol. 2008, 57, 1756–1766. [Google Scholar] [CrossRef]
- Zhou, Z.; Peng, Z.; Cui, J.H.; Shi, Z.; Bagtzoglou, A.C. Scalable localization with mobility prediction for underwater sensor networks. IEEE Trans. Mob. Comput. 2011, 10, 335–348. [Google Scholar] [CrossRef]
- Cheng, W.; Teymorian, A.Y.; Ma, L.; Cheng, X.; Lu, X.; Lu, Z. Underwater localization in sparse 3D acoustic sensor networks. In Proceedings of the 27th IEEE Conference on Computer Communications INFOCOM, Phoenix, AZ, USA, 13–18 April 2008; pp. 236–240.
- Yang, H.; Sikdar, B. A Mobility Based Architecture for Underwater Acoustic Sensor Networks. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM), New Orleans, LO, USA, 30 November–4 December 2008; pp. 5107–5111.
- Pu, L.; Luo, Y.; Mo, H.; Le, S.; Peng, Z.; Cui, J.H.; Jiang, Z. Comparing underwater MAC protocols in real sea experiments. Comput. Commun. 2015, 56, 47–59. [Google Scholar] [CrossRef]
- Kuperman, W.A.; Roux, P. Underwater Acoustics. In Springer Handbook of Acoustics; Springer: New York, NY, USA, 2014; pp. 157–212. [Google Scholar]
- Guo, Z.; Luo, H.; Hong, F.; Yang, M.; Lionel, M. Current progress and research issues in underwater sensor networks. J. Comput. Res. Dev. 2010, 47, 377–389. [Google Scholar]
- Singh, S.; Shivangna, S.; Mittal, E. Range based wireless sensor node localization using PSO and BBO and its variants. In Proceedings of the 2013 IEEE International Conference on Communication Systems and Network Technologies (CSNT), Gwalior, India, 6–8 April 2013; pp. 309–315.
- Zain, I.F.M.; Shin, S.Y. Distributed localization for wireless sensor networks using binary particle swarm optimization (BPSO). In Proceedings of the 2014 IEEE 79th Vehicular Technology Conference (VTC Spring), Seoul, Korea, 18–21 May 2014; pp. 1–5.
- Pluhacek, M.; Senkerik, R.; Zelinka, I. Particle swarm optimization algorithm driven by multichaotic number generator. Soft Comput. 2014, 18, 1–9. [Google Scholar] [CrossRef]
- Kulkarni, R.V.; Forster, A.; Venayagamoorthy, G.K. Computational intelligence in wireless sensor networks: a survey. IEEE Commun. Surv. Tutor. 2011, 13, 68–96. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liang, J.; Jiang, S.; Chen, W. A Localization Method for Underwater Wireless Sensor Networks Based on Mobility Prediction and Particle Swarm Optimization Algorithms. Sensors 2016, 16, 212. https://doi.org/10.3390/s16020212
Zhang Y, Liang J, Jiang S, Chen W. A Localization Method for Underwater Wireless Sensor Networks Based on Mobility Prediction and Particle Swarm Optimization Algorithms. Sensors. 2016; 16(2):212. https://doi.org/10.3390/s16020212
Chicago/Turabian StyleZhang, Ying, Jixing Liang, Shengming Jiang, and Wei Chen. 2016. "A Localization Method for Underwater Wireless Sensor Networks Based on Mobility Prediction and Particle Swarm Optimization Algorithms" Sensors 16, no. 2: 212. https://doi.org/10.3390/s16020212
APA StyleZhang, Y., Liang, J., Jiang, S., & Chen, W. (2016). A Localization Method for Underwater Wireless Sensor Networks Based on Mobility Prediction and Particle Swarm Optimization Algorithms. Sensors, 16(2), 212. https://doi.org/10.3390/s16020212