1. Introduction
Precise point positioning (PPP) is a global navigation satellite system (GNSS) positioning method to calculate precise positions at centimeter- or even millimeter-level accuracy with a single GNSS receiver using precise satellite orbit and clock products [
1,
2]. Over the past decades, PPP using Global Positioning System (GPS) has been proved as an effective approach for the measurement of arbitrarily large ground motions and seismic displacements induced by earthquakes [
3,
4,
5,
6,
7].
BeiDou Navigation Satellite System (BDS) began to offer positioning, navigation, and timing services in the Asia-Pacific region at the end of 2012. It is aimed at serving global users upon its completion by 2020. Many studies have been conducted to investigate the performance of BDS precise positioning. With three geostationary Earth orbit (GEO) and three inclined geosynchronous orbit (IGSO) satellites, Shi et al. [
8] demonstrated that precise relative positioning at an accuracy of 1–2 cm in horizontal and 4 cm in vertical components can be obtained in short baseline mode (~436 m). Montenbruck et al. [
9] presented an initial assessment of the positioning performance of BDS. Using BDS observations, they showed that the accuracy of BDS kinematic relative positioning was comparable to that of GPS kinematic positioning, exhibiting a root mean square (RMS) of 3, 3, and 6 mm in the east, north, and vertical components, respectively.
Meanwhile, intensive attention is also paid to PPP with BDS-only observations. Li et al. [
10] and Xu et al. [
11] realized static and kinematic PPP at centimeter-level accuracy by using BDS observations at a sampling interval of 30 s. Zhao et al. [
12] assessed the contributions of BDS GEO, IGSO, and medium Earth orbit (MEO) satellites to PPP in Asia-Pacific region. By using various combinations of different satellite constellations, they showed that BDS IGSO has the largest contribution to the acceleration of convergence and improvement of positioning accuracy to PPP, particularly in the east component. Recently, Li et al. [
13] presented that the real-time BDS PPP mode with an accuracy of 5 cm in horizontal and 10 cm in vertical components could be obtained after 3 h convergence.
Moreover, BDS has played an important role in high-precision applications, such as the derivation of the zenith tropospheric delay [
14] and the capture of seismic waves. Geng et al. [
15] first used 1 Hz BDS observations to measure ground motions induced by the 2015 Mw 7.8 Gorkha, Nepal earthquake. They employed the variometric approach to estimate the velocity time series and to reconstruct displacements by integrating the velocity time series. A novel approach of a linear trend removal was performed to minimize long-period drifts due to mismodeling of different intervening effects during integration to displacements. However, none of the previous studies has been conducted on the monitoring of seismic displacements/waveforms using the BDS PPP approach. With the BDS PPP approach, the seismic displacements are able to be derived directly. As a consequence, the procedure of integration, a requirement of the variometric approach, is successfully circumvented.
The availability of precise satellite orbit and clock products is of great importance to the realization of PPP. For the GPS constellation, the International GNSS Service (IGS) is able to routinely provide final products containing satellite orbits and clocks with an accuracy of ~2.5 cm and ~75 ps, respectively (see
http://igs.org/products). With the advent of new GNSS constellations such as BeiDou, Galileo, Quasi-Zenith Satellite System (QZSS), and Indian Regional Navigation Satellite System (IRNSS), the IGS has initiated the Multi-GNSS Experiment (MGEX) project to pave the way for the provision of high-quality data and products for all GNSS constellations (
http://igs.org/mgex/products) [
16]. At present, there are three MGEX Analysis Centers (ACs) providing the final satellite orbit and clock products of BDS (i.e., Center for Orbit Determination in Europe (CODE), GeoForschungsZentrum Potsdam (GFZ), and Wuhan University (WHU)) [
17]. It is worth noting that CODE only provides the final products of IGSO and MEO. GFZ has been providing 5 min orbit and 30 s clock products instead of 15 min orbit and 5 min clock products since 3 May 2015.
As shown in
Table 1, BDS precise orbit products released by MGEX ACs are updated every 15 min or 5 min, which is similar to GPS precise orbit products. However, the BDS clock products are only provided at 5 min/30 s sampling intervals, while those of GPS are provided at 30 s/5 s intervals. When processing high-rate (up to 1 Hz) GNSS measurements at epochs that do not coincide with the sampling epochs of the clock products, the clock bias of the observed GNSS satellites has to be obtained through interpolation [
18,
19]. Due to the stochastic characteristic of the clock variations, Montenbruck et al. [
20] mentioned that the interpolation error for 5 min clock products would not satisfy the requirement to achieve centimeter-level accuracy for high-rate (up to 1 Hz) GNSS positioning.
In this contribution, first we generated and evaluated 1 Hz BDS clock corrections based on the precise orbit products. The precision of BDS PPP with 1 Hz clock products was analyzed and applied to retrieve seismic displacements induced by the 2015 Mw 7.8 Gorkha, Nepal, earthquake. Finally, the benefits of high-rate satellite clock corrections to BDS PPP were investigated.
2. Data Collection
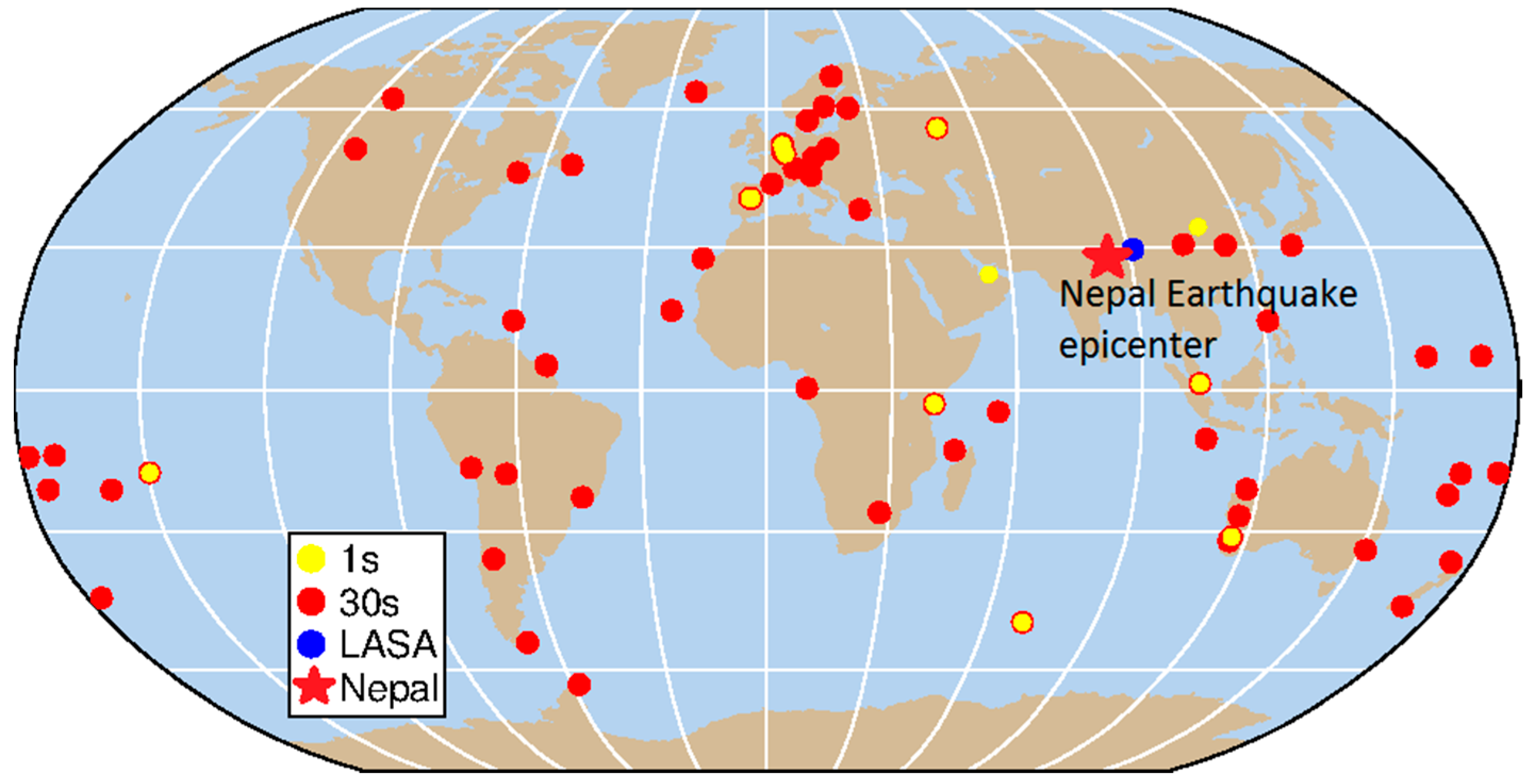
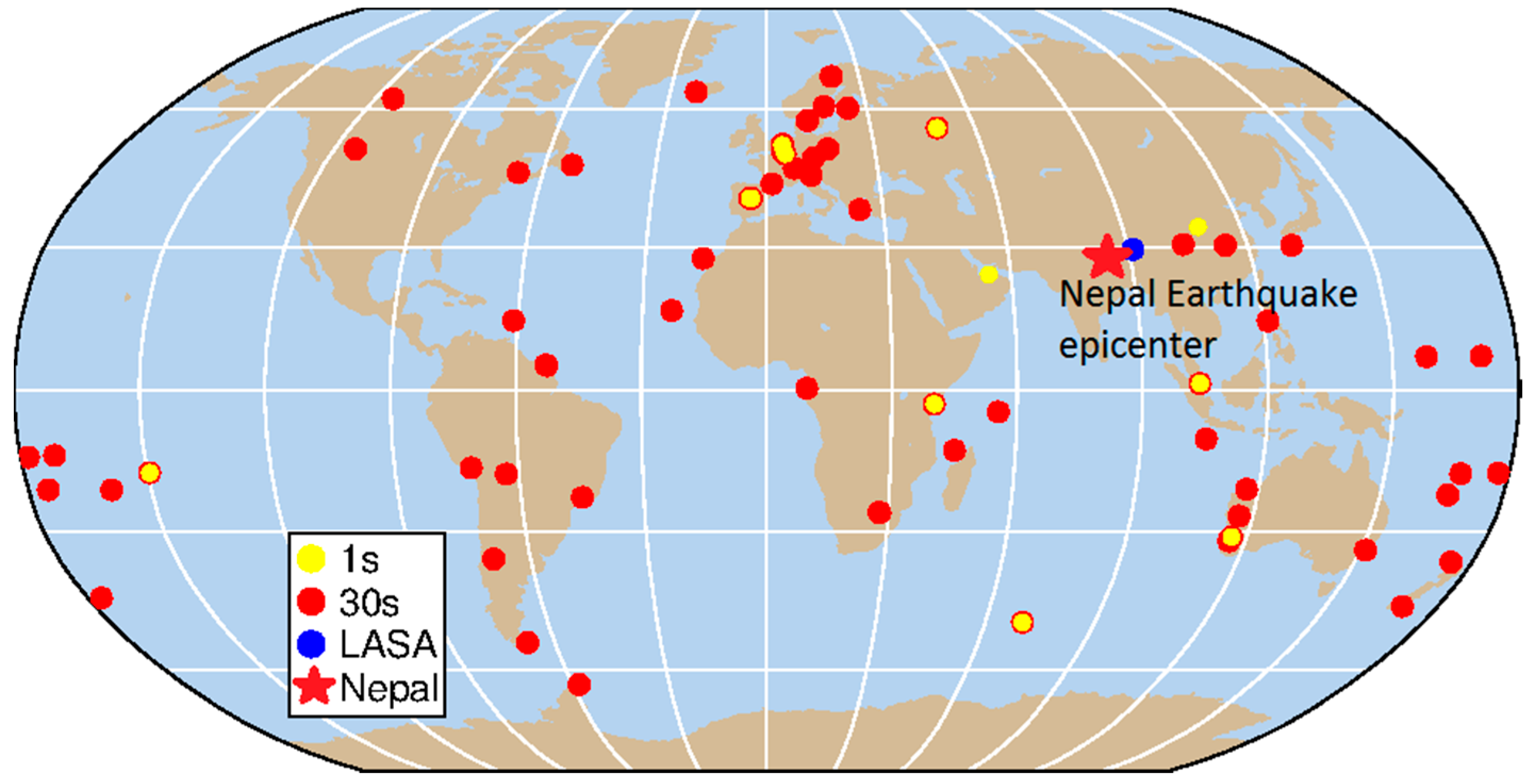
The 2015 Mw 7.8 Gorkha, Nepal, earthquake took over 9000 lives and injured more than 23,000 people. According to the U.S. Geological Survey (USGS) (
http://earthquake.usgs.gov), the origin time of this event was 06:11:26 (UTC), on 25 April 2015; its epicenter was located at 28.147° N, 84.708° E; and its hypocentral depth was 15 km. It was the worst natural disaster to strike Nepal since the 1934 Nepal-Bihar earthquake. Continued aftershocks occurred throughout Nepal at the intervals of 15–20 min. The country also suffered from continuous risk of landslides. The temblor was caused by a sudden thrust, or release of built-up stress, along the major fault line where the Indian plate, carrying India, is slowly diving underneath the Eurasian plate, carrying much of Europe and Asia. Kathmandu, situated on a block of crust approximately 120 km wide and 60 km long, reportedly shifted 3 m to the south in a matter of just 30 s.
The BDS and GPS data were collected and processed to validate the benefit of high-rate satellite clocks for BDS PPP to the measurements of seismic displacements of this earthquake event.
2.1. GNSS Stations with 1 s Sampling Rate Data
The station LASA from BDS Experimental Tracking Network (BETN) is located in Lhasa city, 645 km away from the epicenter. The recording of BDS and GPS data at LASA was applied to study the performance of BDS PPP to retrieve high-precision seismic displacements from the Nepal earthquake.
In order to generate the high-rate GNSS satellite clock products, the data from 1 s GNSS stations from MGEX and BETN were collected and utilized (the blue and yellow dots in
Figure 1). BETN network was built and maintained by Wuhan University as a part of continuous global observation network to solve the precise orbit and satellite clock products of BDS in real time. Most stations from BETN are equipped with UB240-CORS receivers manufactured by the Beijing Unicore Communication Company, which can collect both the L1/L2 pseudo-range and phase observation of GPS and B1/B2 of BDS. Two stations from BETN, NTSC in Xi’an and DHAB in United Arab Emirates, can record 1 s observations. Meanwhile, there are 17 stations from MGEX can gather 1 s sampling rate observations of BDS and GPS (
ftp://cddis.gsfc.nasa.gov/pub/gps/data/campaign/mgex/highrate/). We chose 10 of these stations that had a good common view of constellation with station LASA, namely: CEBR (Spain), DLF1 (The Netherlands), KRGG (French Southern Territories), KZN2 (Russian Federation), MAL2 (Kenya), NNOR (Australia), REDU (Belgium), SIN1 (Singapore), THTG (French Polynesia), VILL (Spain).
2.2. GNSS Stations with 30 s Sampling Rate Data
In April 2015, four stations from BETN were recording 30 s sampling rate data: CHDU in Chengdu, LEID in The Netherlands, PFTP in Australia, and JOHA in South Africa. Meanwhile, MGEX has about 60 stations which can record BDS and GPS observations at 30 s intervals. In addition to selected 13 stations sampling at a 1 s rate and 68 stations sampling at a 30 s rate (shown in
Figure 1) were added as reference tracking data to implement the precise orbit determination (POD) procedure to obtain higher precision satellite orbits.
5. BDS PPP with Different Clock Interval
Due to the stochastic characteristic of the clock variations, the interpolation of the low-rate satellite clock products has a relatively large loss of precision. As a result, it is not sufficient for high-rate (up to 1 Hz) precise positioning and applications. When processing 1 Hz measurements at epochs that do not coincide with sampling epochs of the ephemeris products, the orbit and clock offset of the observed satellites have to be obtained through interpolation. In contrast to orbit data, high-order polynomial interpolation is not suitable for clock parameters due to the underlying random noise processes; therefore, linear interpolation is advisable [
20].
We utilized BDS WHU 1 s clock solutions to assess the errors associated with the interpolation of 5 s, 30 s, and 300 s clock data sets. Firstly, we resampled the BDS WHU 1 s clock products to 5 s, 30 s, and 300 s interval products. Secondly, the 5 s, 30 s, and 300 s data sets were interpolated to a 1 s interval, respectively. Finally, they were compared with the 1 Hz products using the double-difference approach described in
Section 3.
The 1 s WHU clocks were estimated based on the 13 GNSS stations with 1 s intervals, which are mainly deployed in the China-Australia area. When we calculated the interpolation errors, we took station LASA as a reference. In other words, we only compared the tracking arcs (epochs) that are visible in LASA station with elevation cutoff angle of 7°.
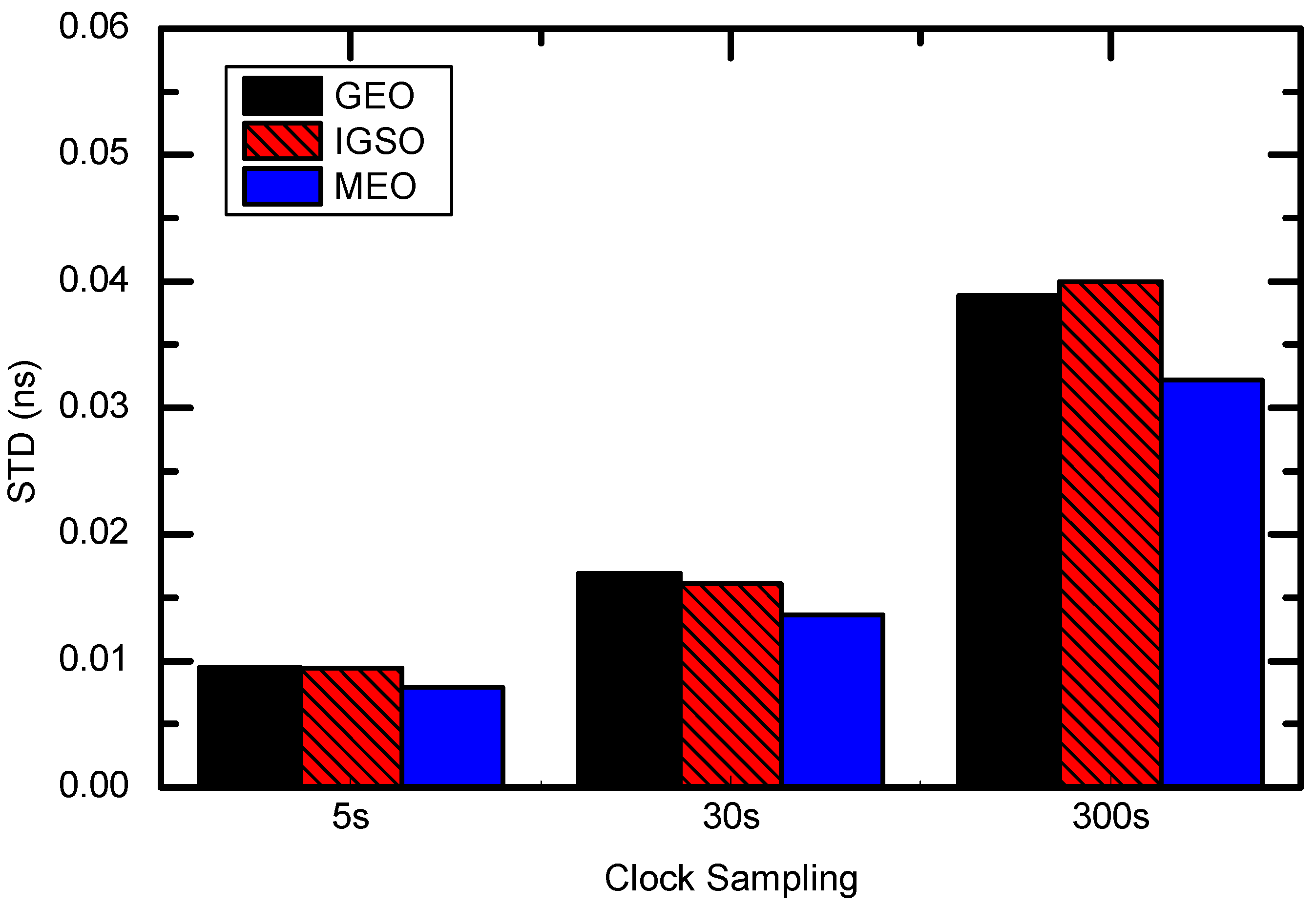
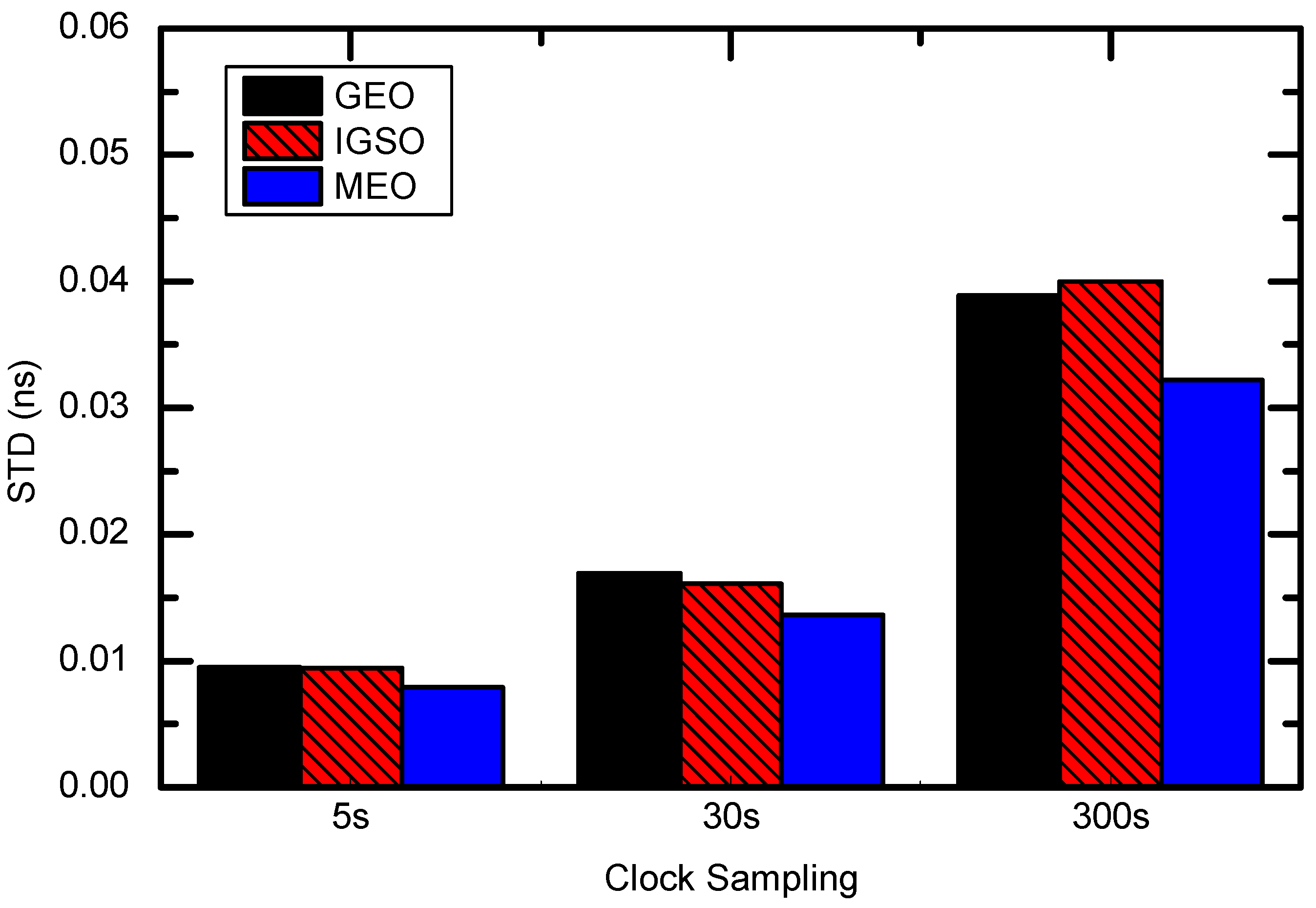
The clock interpolation errors are summarized in
Figure 6 for the individual clock types. The best interpolation results are obtained from 5 s intervals. The largest errors are obtained from 300 s intervals. For 30 s intervals, the interpolation errors are better than 0.02 ns (i.e., 0.6 cm), while for 300 s intervals, the interpolation errors increase to 0.04 ns (1.2 cm) level.
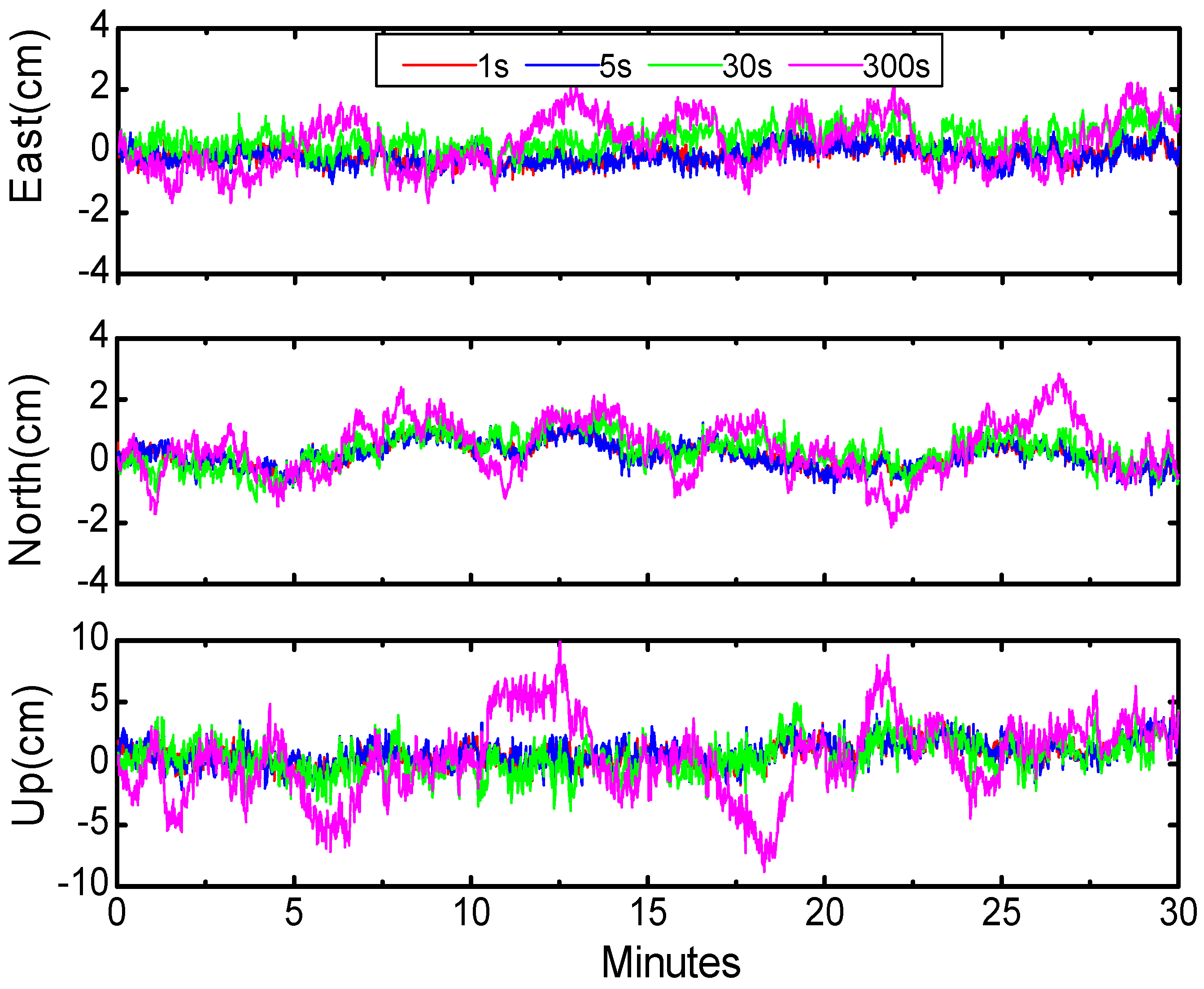
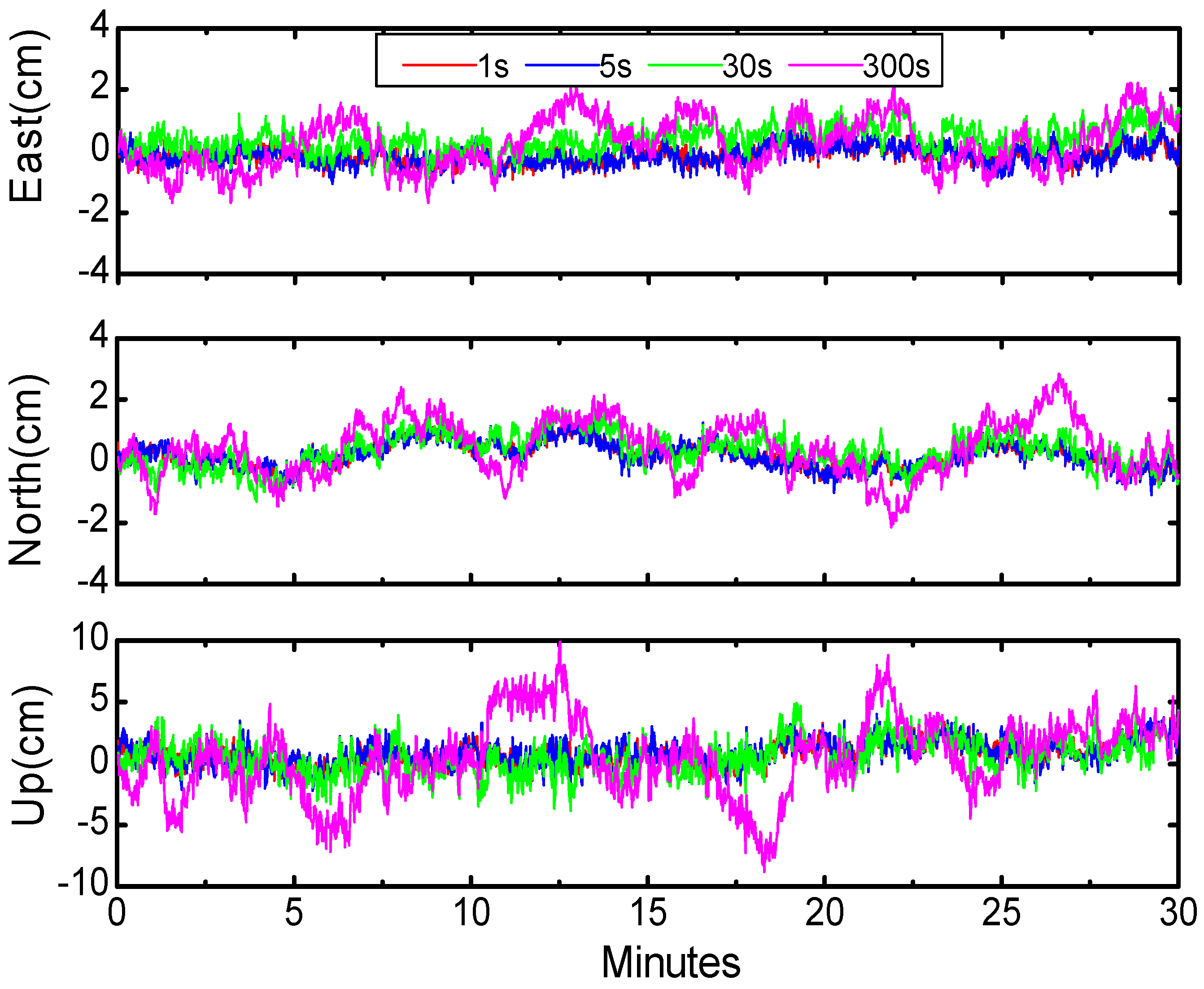
To further investigate the contribution of clock corrections with different sampling intervals, we conducted BDS PPP to process the same data as
Section 4 by applying satellite clock products at 300 s, 30 s, 5 s, and 1 s intervals, respectively. To demonstrate the accuracy of BDS PPP solutions (prior to the earthquake), we randomly took five segments of BDS data, each with a length of 30 min, and computed the RMS of BDS PPP with clock intervals of 1 s, 5 s, 30 s, and 300 s for all four cases, which are listed in
Table 8. Shown in
Figure 7 is one segment of the error performances of BDS PPP in the east, north, and vertical components with clock intervals of 1 s, 5 s, 30 s, and 300 s respectively. From the mean values of
Table 8, it could be concluded that the PPP with 300 s clock intervals is the worst and that with 1 s clock interval is the best. Comparing the results with 1 s and 5 s clock intervals, they have almost the same precision, which means that the contribution of 5 s clock intervals are almost equal to 1 s clock interval.
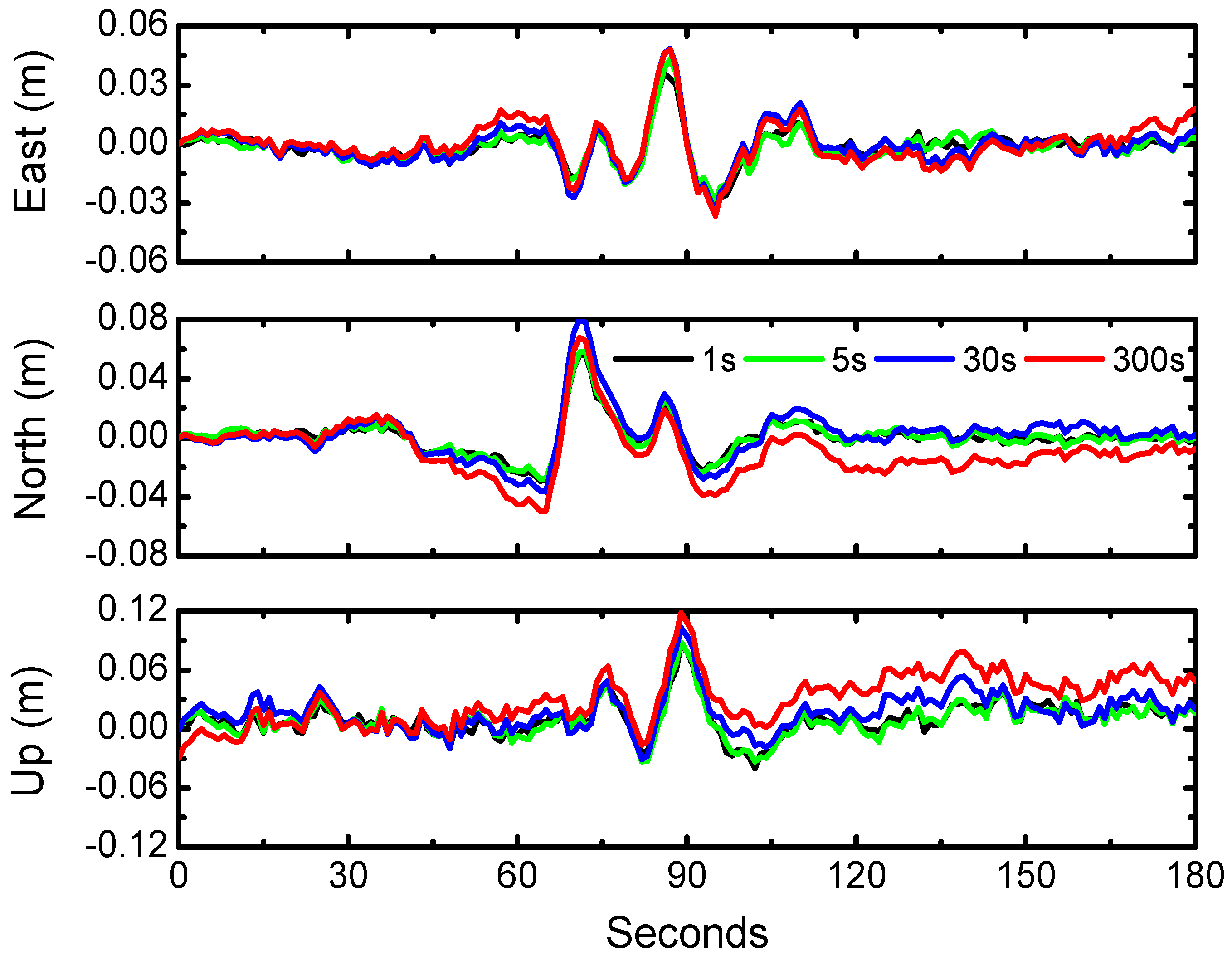
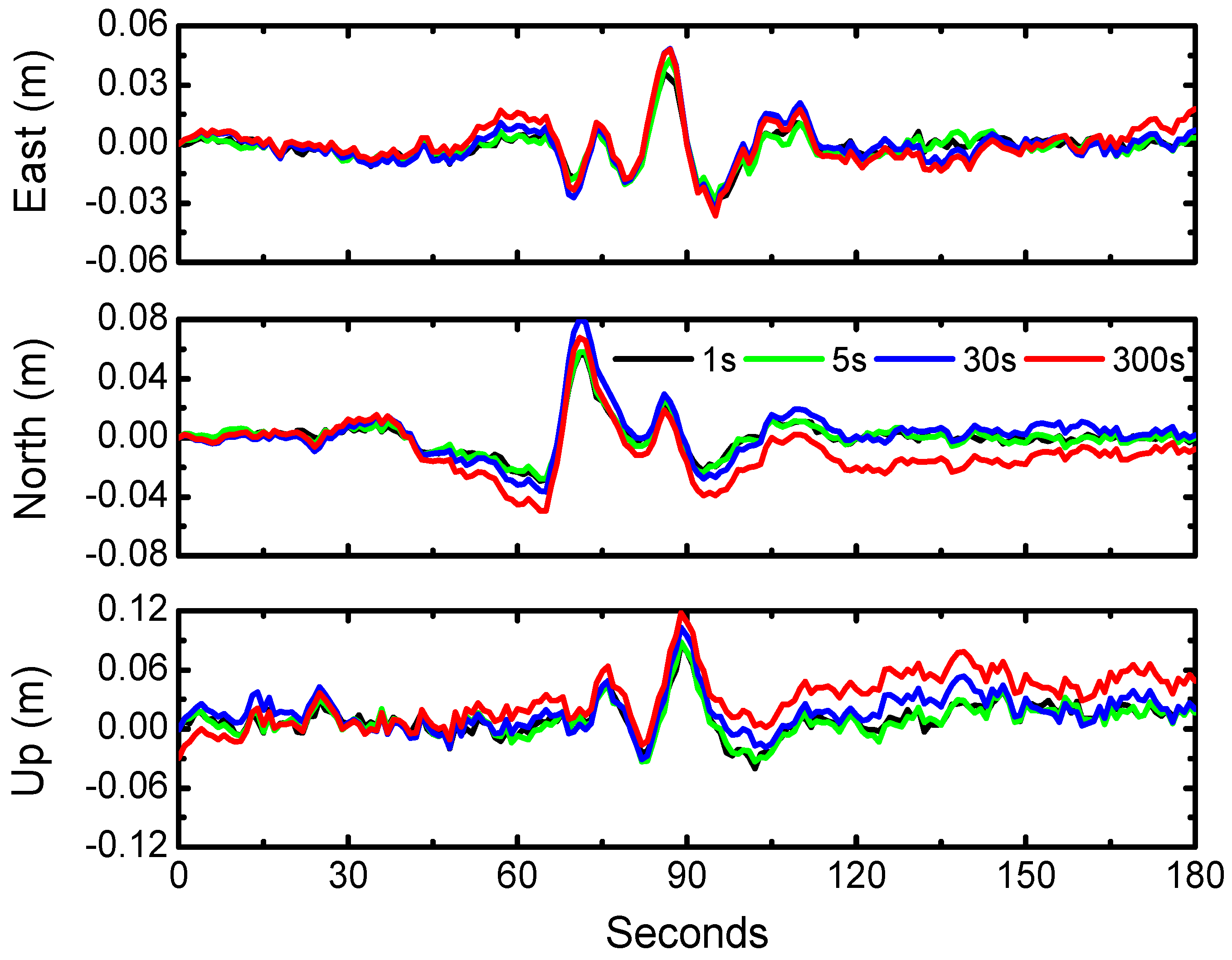
In addition, we retrieved the displacements waveforms with BDS PPP (during the earthquake) using different clock products at intervals of 1 s, 5 s, 30 s, and 300 s (
Figure 8); results clearly show that 1 s and 5 s clock product demonstrate more stable and reliable waveforms. Considering the time consumption of clock estimates, we suggest that 5 s clock interval is competent for the requirement of high-rate BDS solutions. This phenomenon is consistent with that derived from GPS PPP results [
18].
6. Conclusions
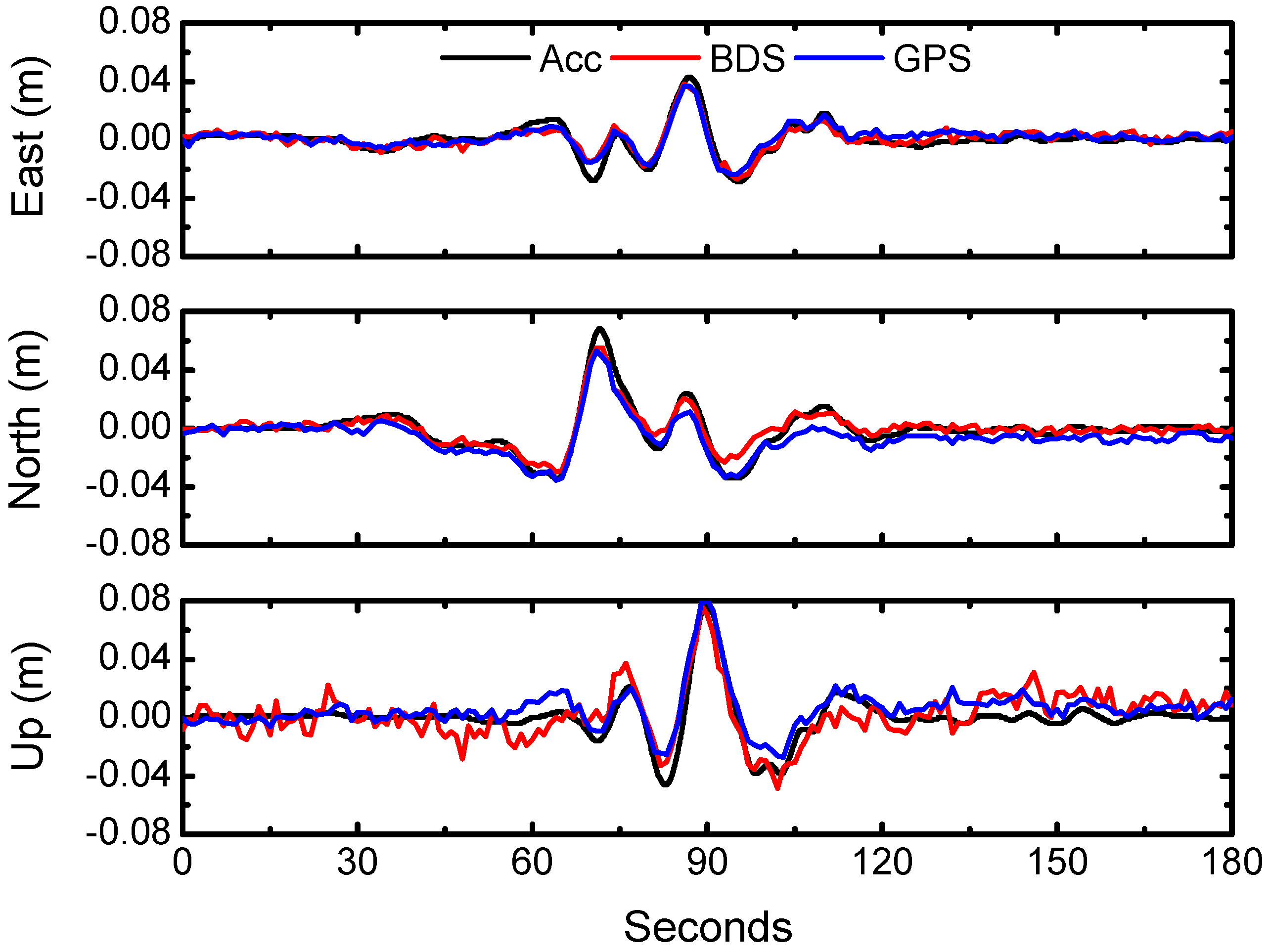
BDS PPP have been implemented and employed to retrieve seismic displacements of the 2015 Mw 7.8 Gorkha, Nepal, earthquake. In order to obtain positioning results with higher precision, 1 Hz BDS satellite clock corrections were generated based on precise orbit products from WHU. They were utilized for BDS PPP solutions and their results were compared with the counterpart of GPS PPP. It is demonstrated that the accuracy of BDS PPP could reach 1 cm in horizontal and 2 cm in vertical components in retrieving seismic displacements of this earthquake event, which is comparable to the result of GPS PPP.
We have also analyzed the contributions to BDS PPP of clock corrections with different intervals. It is shown that PPP with 300 s clock intervals is the worst and that with 1 s clock interval is the best, while the precision of PPP solutions for the 5 s clock intervals is almost the same as 1 s results. Considering the time consumption of clock estimates, we suggest that the 5 s clock interval is adequate with regard to the requirement of high-rate BDS solutions.
It should be noted that the approach of clock generation in this study is not suitable for real-time estimation. For future research we plan to investigate the real-time clock estimation approach for real-time applications, such as rapid determination of earthquake magnitude [
28], earthquake early warning [
29], and rapid hazard assessment [
30].






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}