
Robust and Accurate Vision-Based Pose Estimation Algorithm Based on Four Coplanar Feature Points

Abstract
:1. Introduction
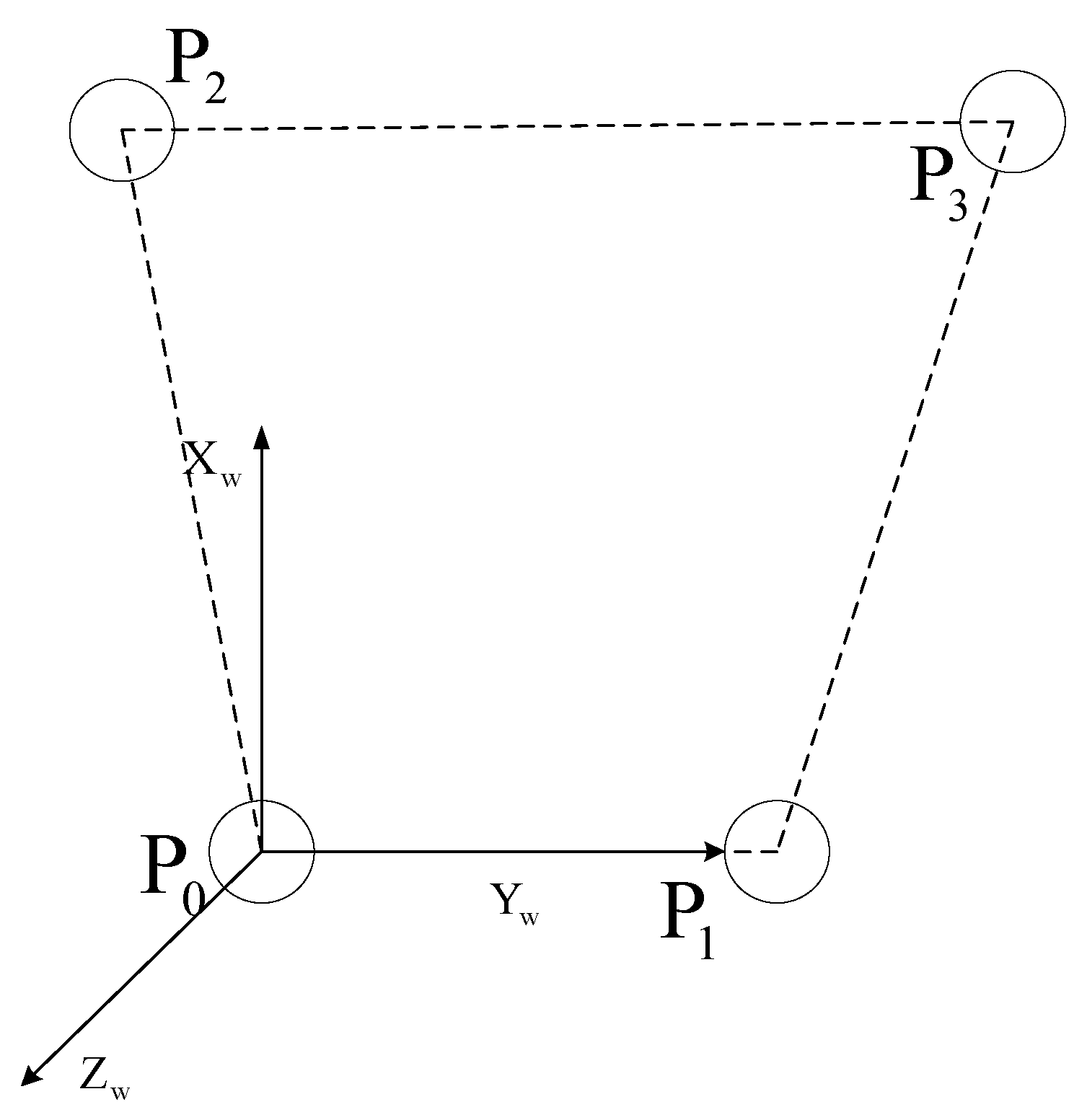
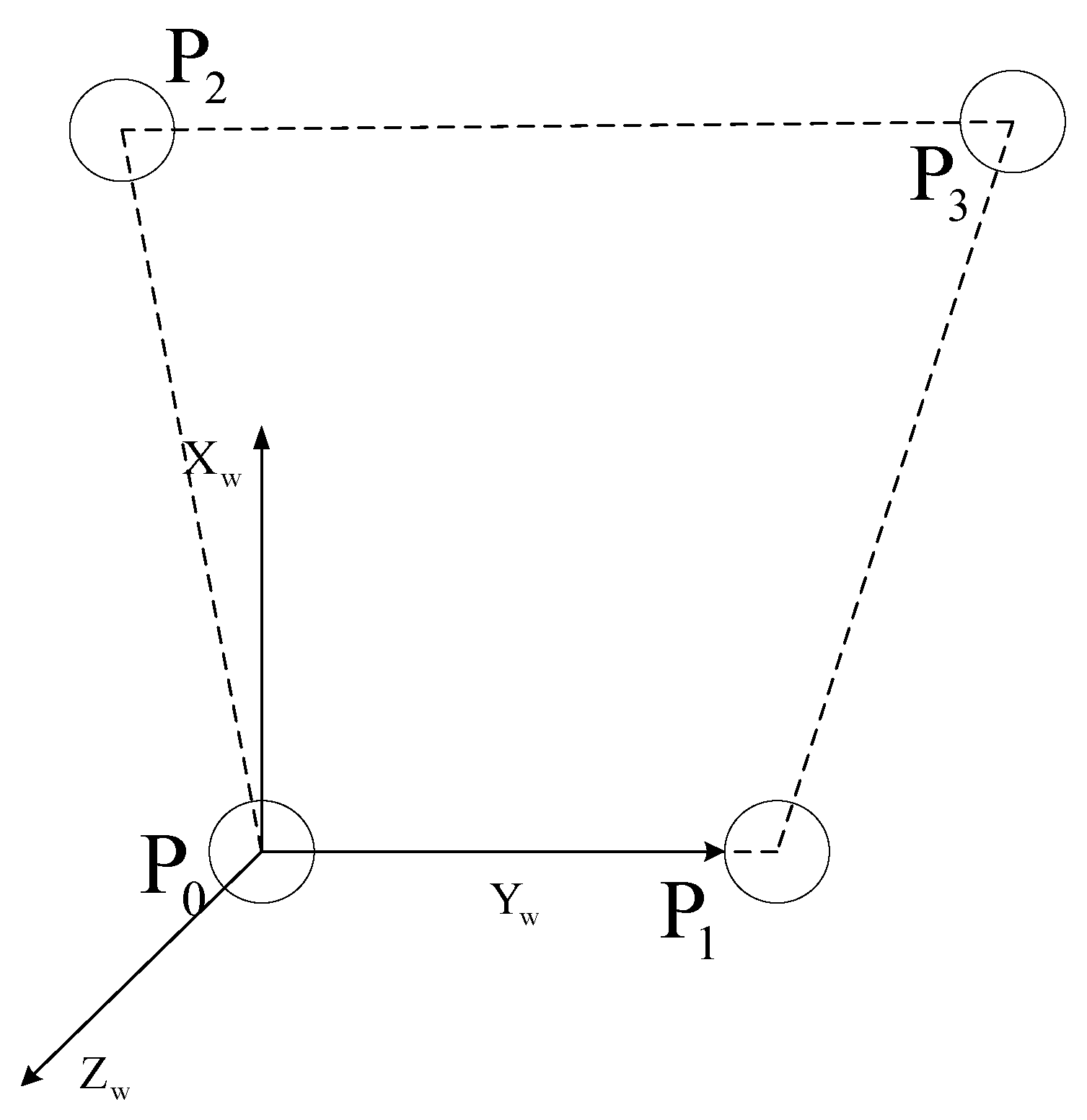
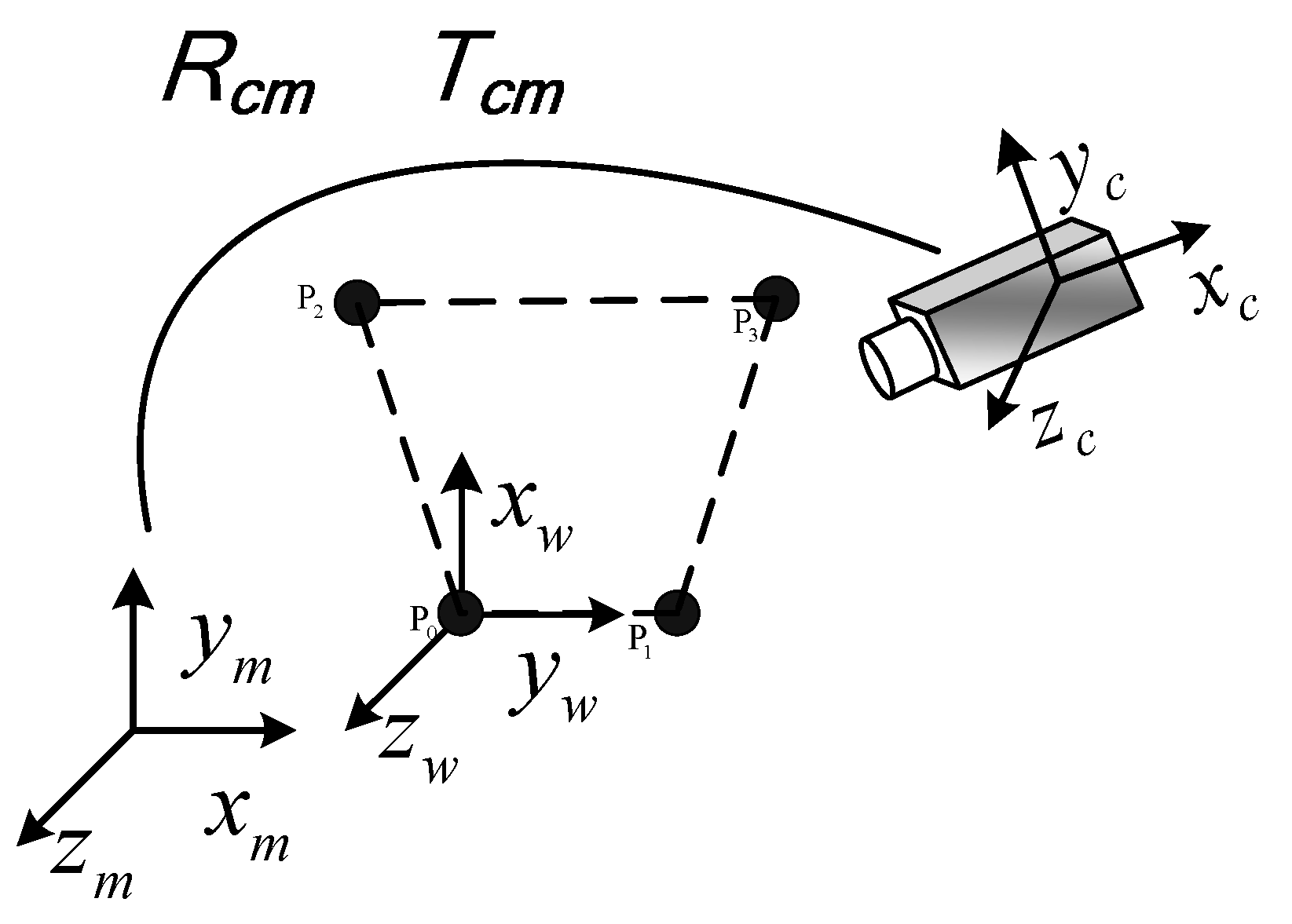
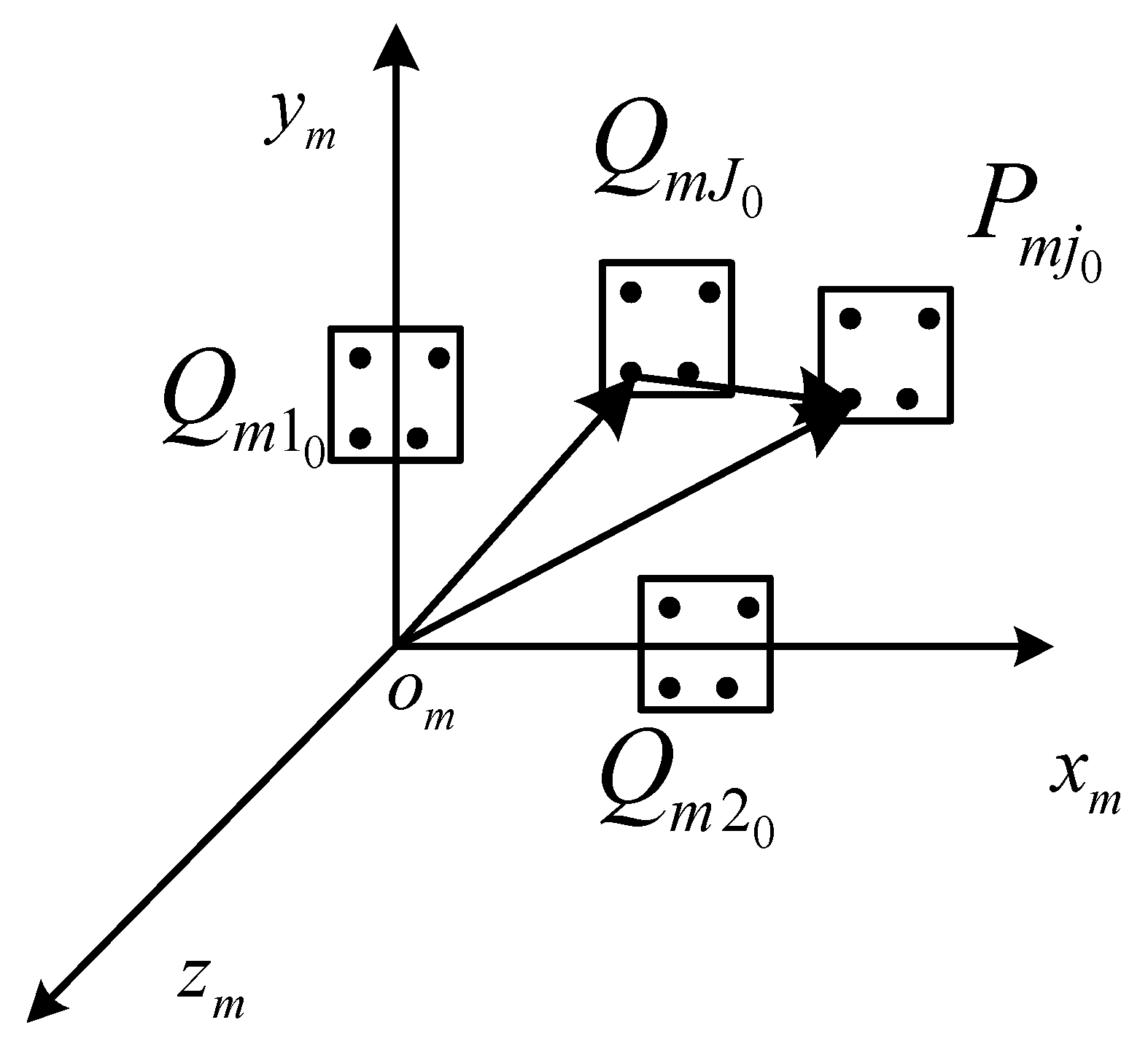
2. The Solving of Feature Point Coordinates in the Camera Coordinate System
3. The Solving of Object Pose
4. Experiment Results
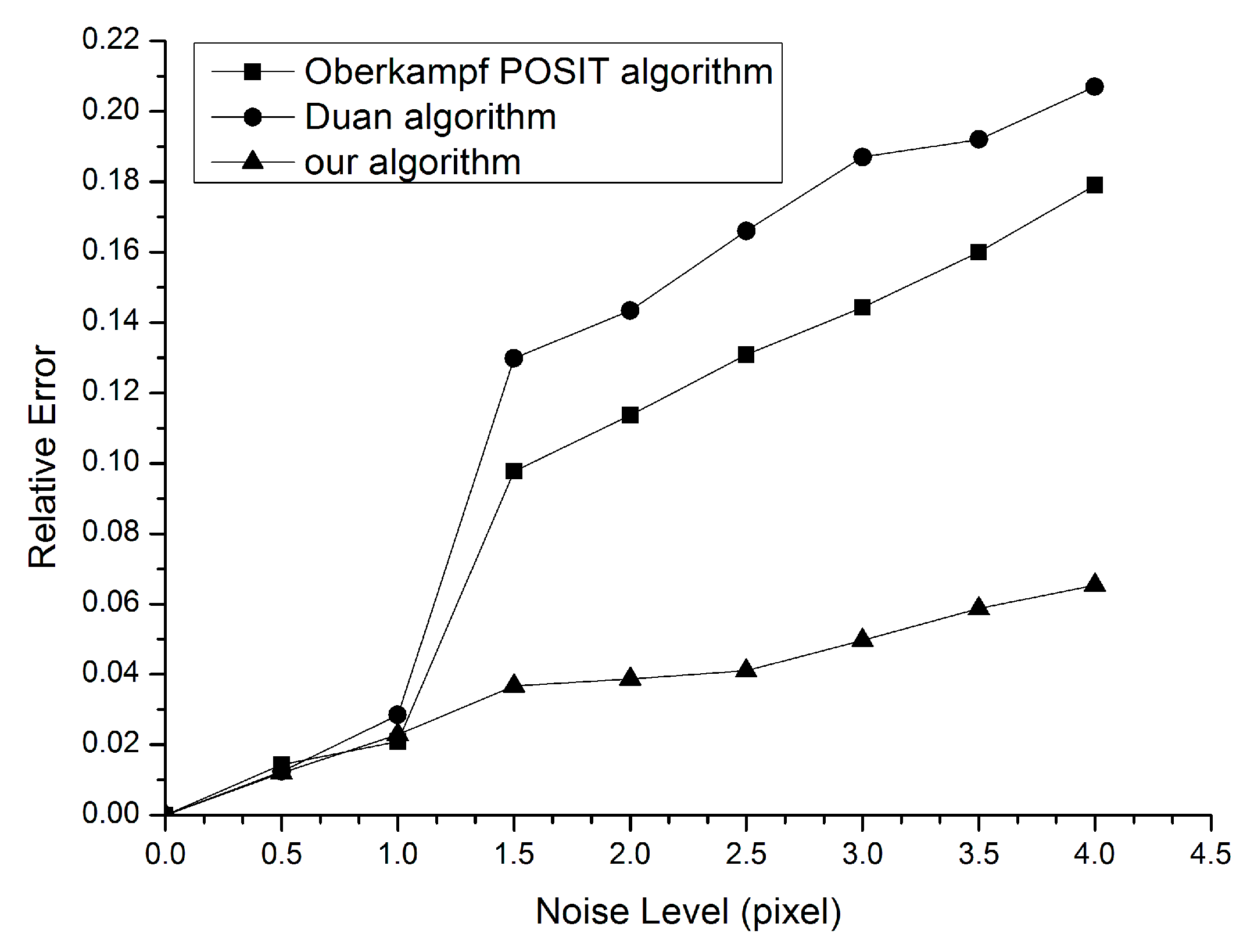
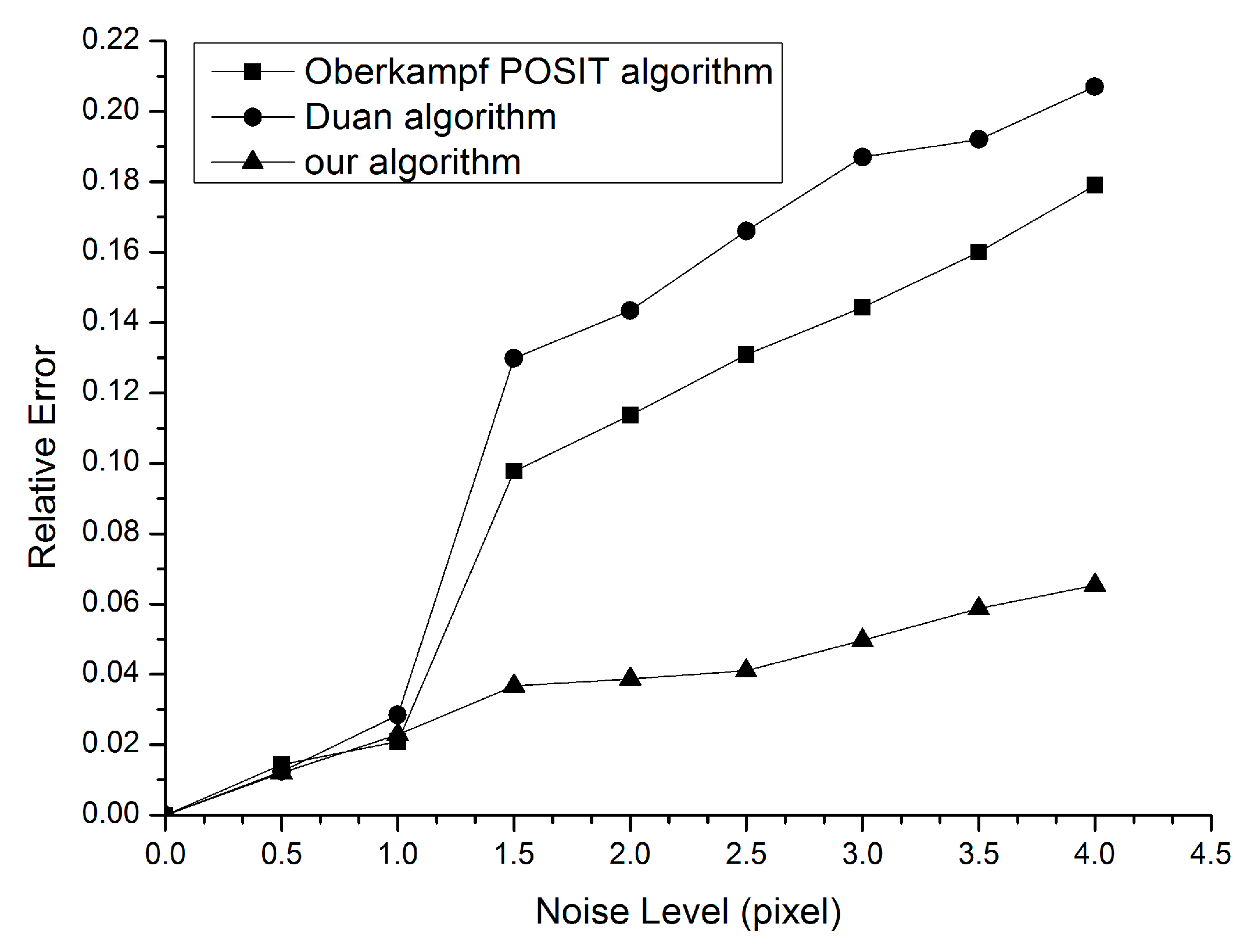
4.1. Computer Simulation Experiments
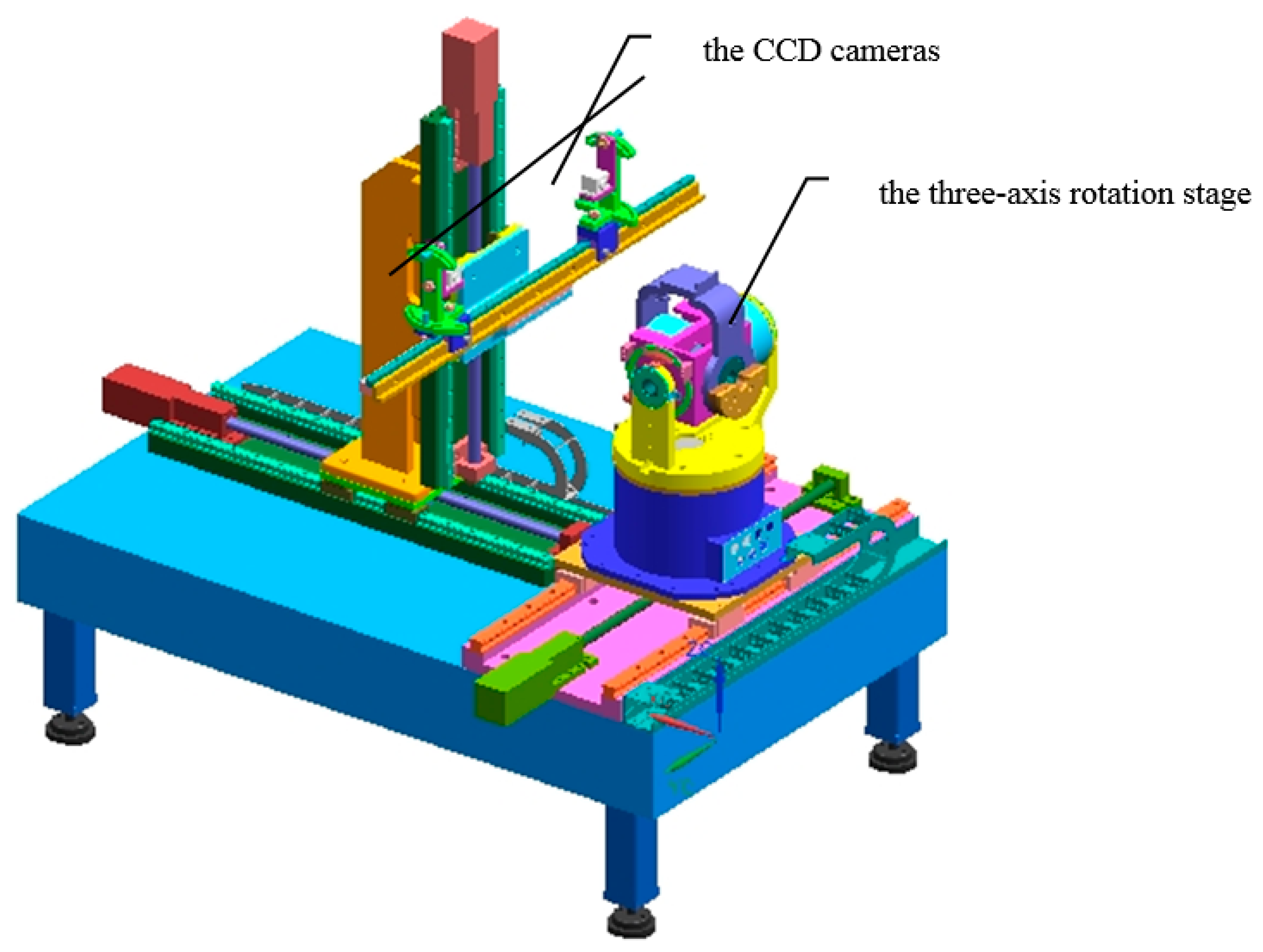
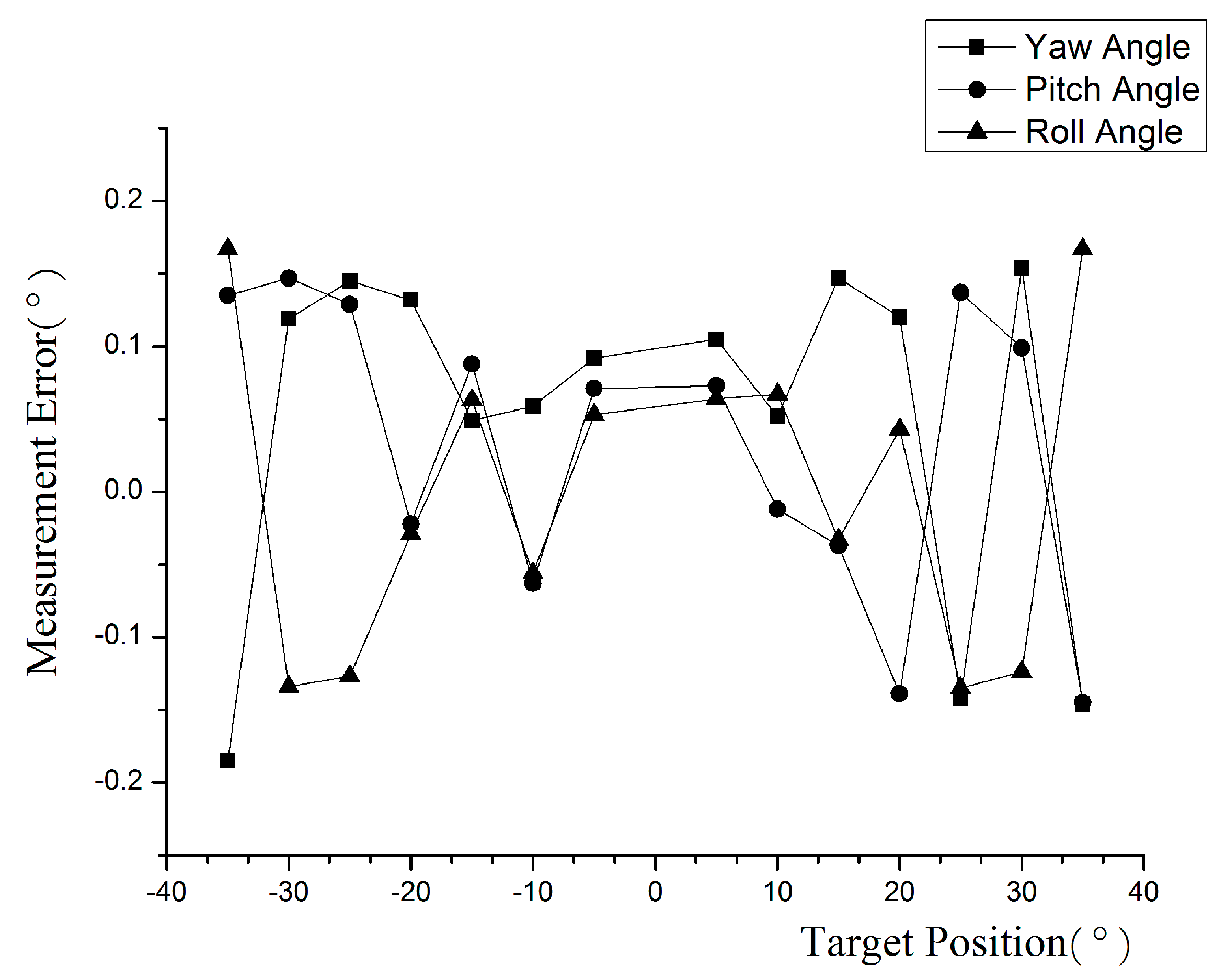
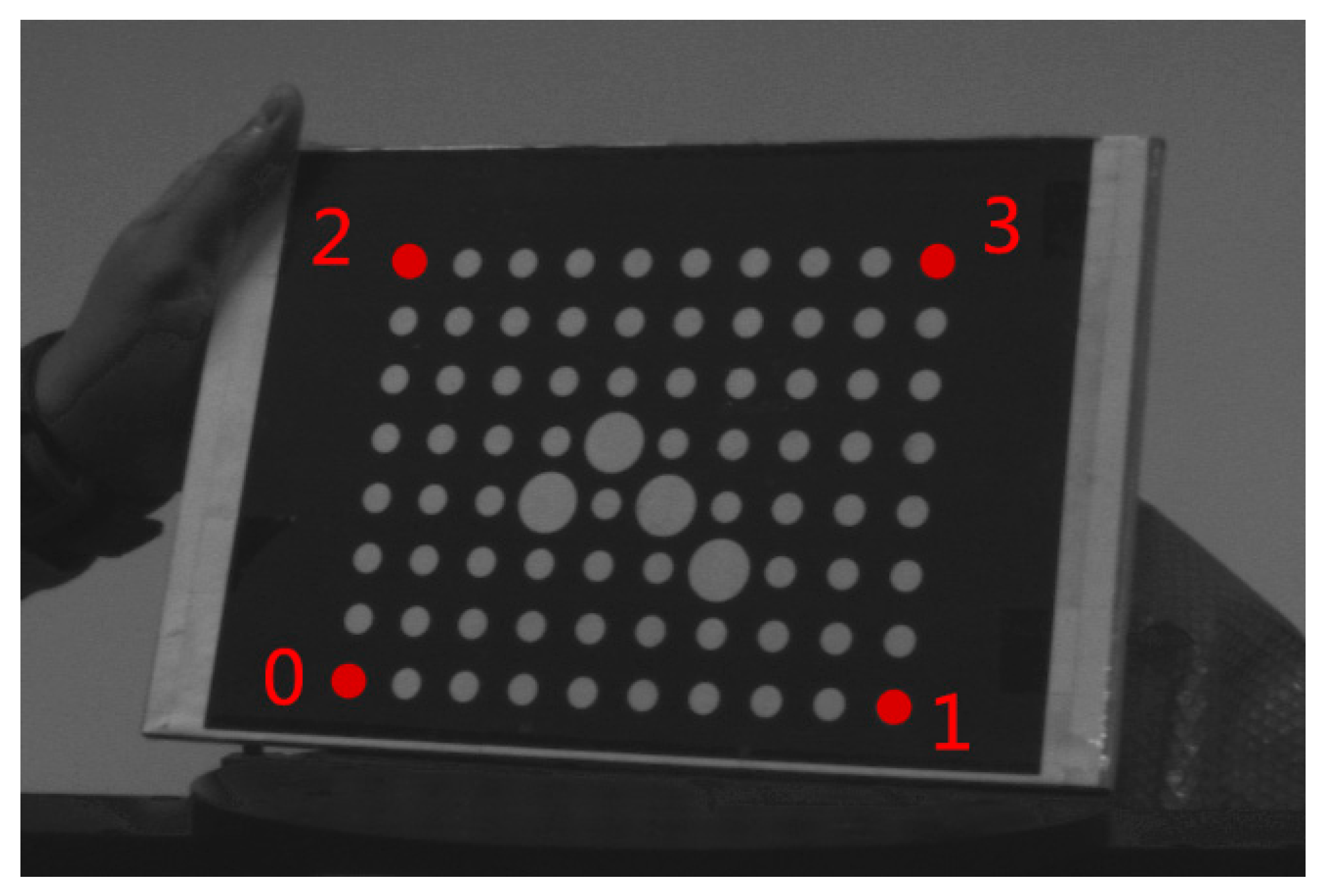
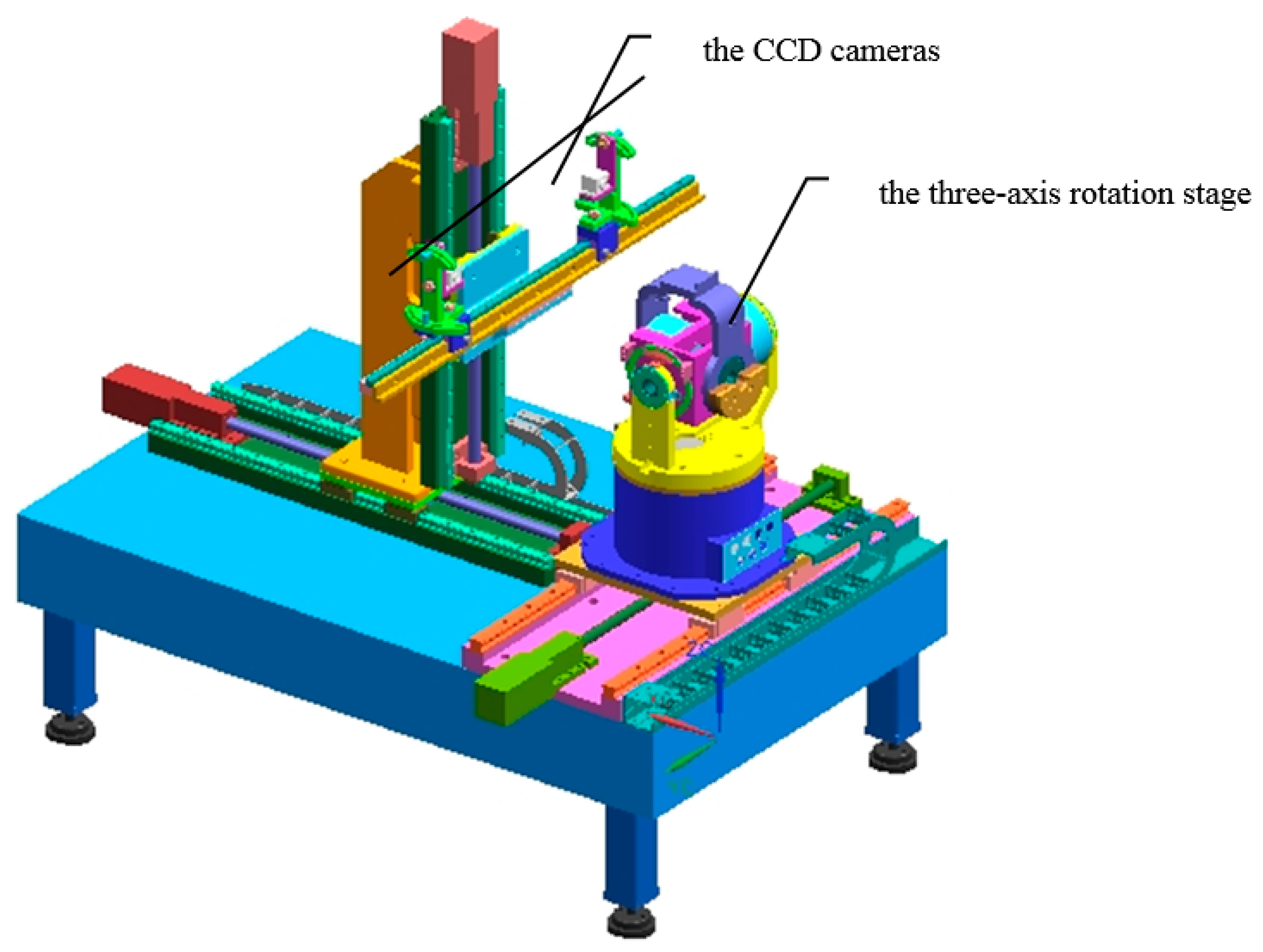
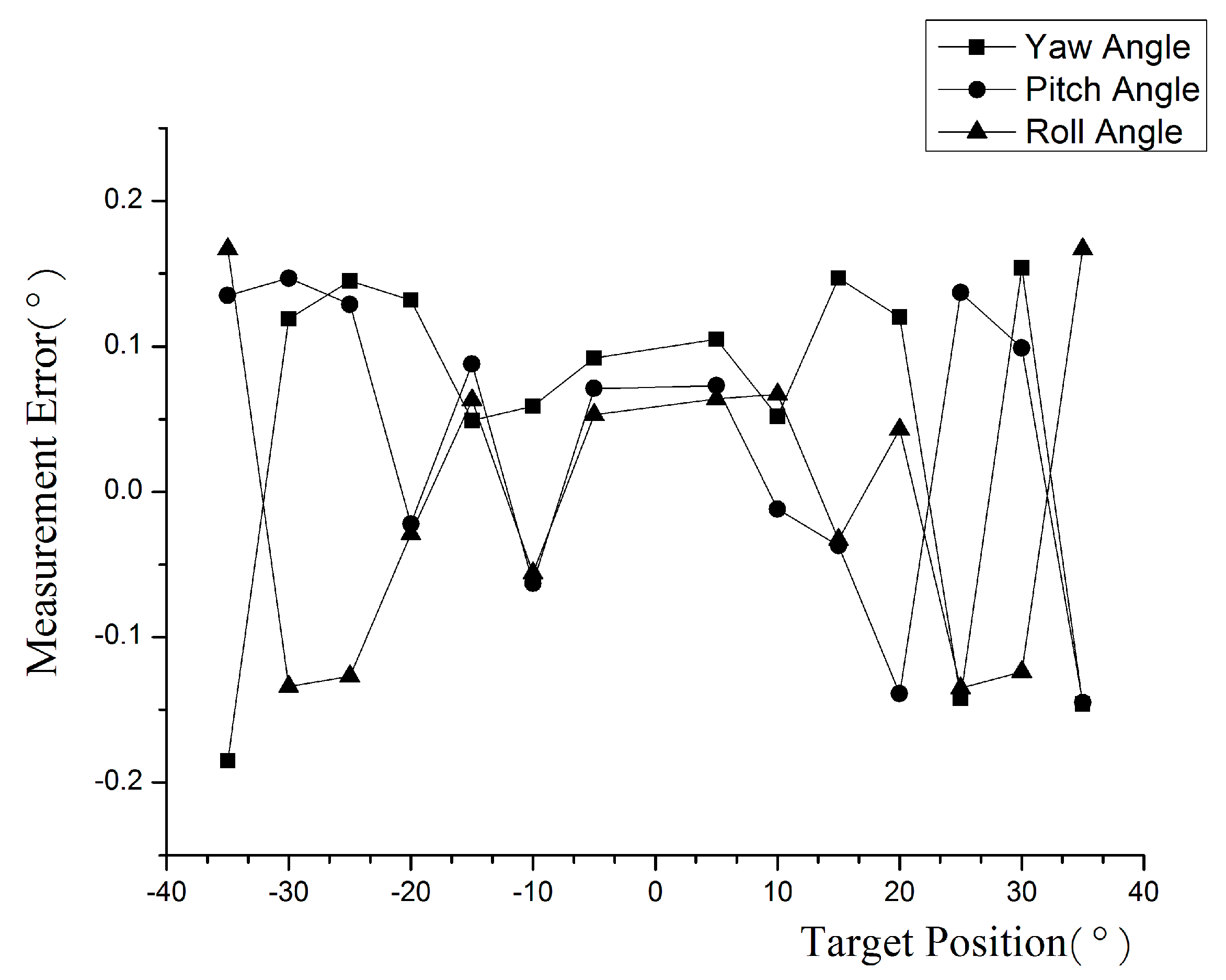
4.2. The Measurement Experiments for Accuracy
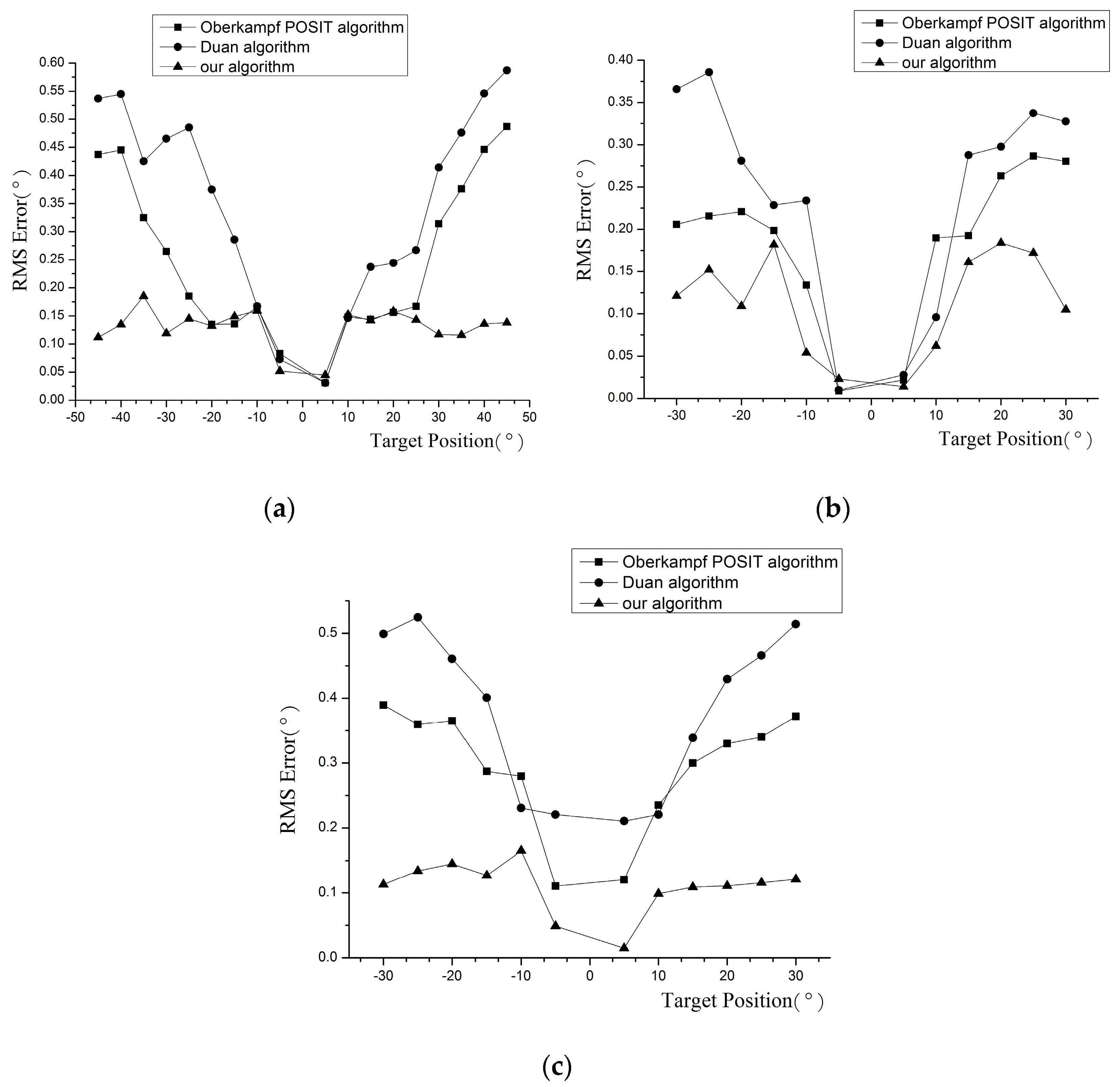
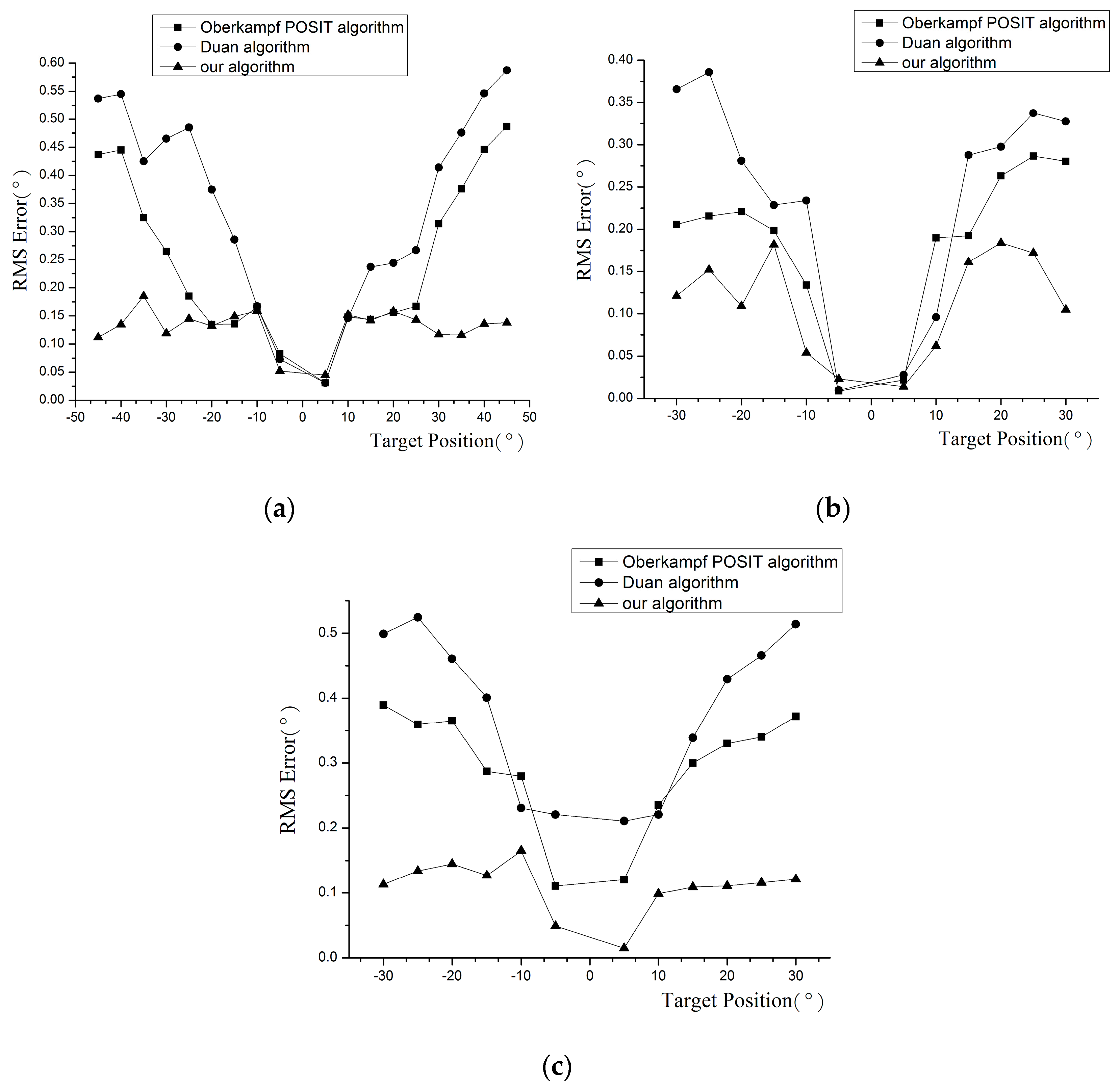
4.3. The Comparative Experiments for Accuracy
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Proof of the Solving of
References
- Kim, S.J.; Kim, B.K. Dynamic ultrasonic hybrid localization system for indoor mobile robots. IEEE Trans. Ind. Electron. 2013, 60, 4562–4573. [Google Scholar] [CrossRef]
- Mao, W.; Eke, F. A survey of the dynamics and control of aircraft during aerial refueling. Nonlinear Dyn. Syst. Theory 2008, 8, 375–388. [Google Scholar]
- Valenti, R.; Sebe, N.; Gevers, T. Combining head pose and eye location information for gaze estimation. IEEE Trans. Image Process. 2012, 21, 802–815. [Google Scholar] [CrossRef] [PubMed]
- Murphy-Chutorian, E.; Trivedi, M.M. Head pose estimation in computer vision: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 607–626. [Google Scholar] [CrossRef] [PubMed]
- Schall, G.; Wagner, D.; Reitmayr, G.; Taichmann, E.; Wieser, M.; Schmalstieg, D.; Hofmann-Wellenhof, B. Global pose estimation using multi-sensor fusion for outdoor augmented reality. In Proceedings of the 8th International Symposium on Mixed and Augmented Reality (ISMAR 2009), Santa Barbara, CA, USA, 19–22 October 2009; pp. 153–162.
- Hu, Z.Y.; Wu, F.C. A note on the number solution of the non-coplanar P4P problem. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 550–555. [Google Scholar] [CrossRef]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. EPnP: An accurate O(n) solution to the PnP problem. Int. J. Comput. Vis. 2009, 81, 155–166. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Chen, W.; Wang, J. A novel linear algorithm for P5P problem. Appl. Math. Comput. 2008, 205, 628–634. [Google Scholar] [CrossRef]
- Ansar, A.; Daniilidis, K. Linear pose estimation from points or lines. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 578–589. [Google Scholar] [CrossRef]
- Duan, F.Q.; Wu, F.C.; Hu, Z.Y. Pose determination and plane measurement using a trapezium. Pattern Recognit. Lett. 2008, 29, 223–231. [Google Scholar] [CrossRef]
- DeMenthon, D.F.; Davis, L.S. Model-based object pose in 25 lines of code. Int. J. Comput. Vis. 1995, 15, 123–141. [Google Scholar] [CrossRef]
- Gramegna, T.; Venturino, L.; Cicirelli, G.; Attolico, G.; Distante, A. Optimization of the POSIT algorithm for indoor autonomous navigation. Robot. Auton. Syst. 2004, 48, 145–162. [Google Scholar] [CrossRef]
- Oberkampf, D.; DeMenthon, D.F.; Davis, L.S. Iterative pose estimation using coplanar points. In Proceedings of the 1993 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’93), New York, NY, USA, 15–17 June 1993; pp. 626–627.
- Zhang, S.; Liu, F.; Cao, B.; He, L. Monocular vision-based two-stage iterative algorithm for relative position and attitude estimation of docking spacecraft. Chin. J. Aeronaut. 2010, 23, 204–210. [Google Scholar]
- Zhang, S.; Cao, X.; Zhang, F.; He, L. Monocular vision-based iterative pose estimation algorithm from corresponding feature points. Sci. Chin. Inf. Sci. 2010, 53, 1682–1696. [Google Scholar] [CrossRef]
- Wang, P.; Xiao, X.; Zhang, Z.; Sun, C. Study on the position and orientation measurement method with monocular vision system. Chin. Opt. Lett. 2010, 8, 55–58. [Google Scholar] [CrossRef]
- Liu, M.L.; Wong, K.H. Pose estimation using four corresponding points. Pattern Recognit. Lett. 1999, 20, 69–74. [Google Scholar] [CrossRef]
- Zhang, S.; Ding, Y.; Hao, K.; Zhang, D. An efficient two-step solution for vision-based pose determination of a parallel manipulator. Robot. Comput. Integr. Manuf. 2012, 28, 182–189. [Google Scholar] [CrossRef]
- Fan, B.; Du, Y.; Cong, Y. Robust and accurate online pose estimation algorithm via efficient three-dimensional collinearity model. IET Comput. Vis. 2013, 7, 382–393. [Google Scholar] [CrossRef]
- Pan, H.; Huang, J.; Qin, S. High accurate estimation of relative pose of cooperative space targets based on measurement of monocular vision imaging. Optik 2014, 125, 3127–3133. [Google Scholar] [CrossRef]
- Hmam, H.; Kim, J. Optimal non-iterative pose estimation via convex relaxation. Image Vis. Comput. 2010, 28, 1515–1523. [Google Scholar] [CrossRef]
- Ons, B.; Verstraelen, L.; Wagemans, J. A computational model of visual anisotropy. PLoS ONE 2011, 6, e21091. [Google Scholar] [CrossRef] [PubMed]
- Heikkila, J.; Silvén, O. A four-step camera calibration procedure with implicit image correction. In Proceedings of the 1997 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 1106–1112.
- Zhang, Z. Flexible camera calibration by viewing a plane from unknown orientations. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 1, pp. 666–673.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | fx | fy | cx | cy | k1 | k2 | p1 | p2 |
|---|---|---|---|---|---|---|---|---|
| Camera 1 | 4341.501 | 4341.918 | 1034.667 | 1033.926 | −0.361 | 0.140 | −0.00024 | 0.00008 |
| Camera 2 | 4373.530 | 4373.659 | 1000.997 | 1020.977 | −0.373 | 0.342 | 0.00033 | −0.00040 |
| Frame 1 | Frame 2 | Frame 3 | Frame 4 | Frame 5 | Frame 6 | |
|---|---|---|---|---|---|---|
| D01 (mm) | ||||||
| Duan | −0.455 | 0.456 | −0.352 | 0.568 | −0.672 | −0.433 |
| Oberk | 0.338 | −0.209 | 0.189 | −0.209 | 0.335 | −0.326 |
| Our | −0.047 | 0.148 | −0.078 | −0.041 | 0.039 | −0.086 |
| D02 (mm) | ||||||
| Duan | 0.532 | −0.622 | −0.535 | 0.659 | −0.553 | 0.436 |
| Oberk | 0.248 | −0.295 | 0.306 | −0.331 | 0.359 | −0.389 |
| Our | 0.040 | −0.138 | 0.025 | 0.114 | 0.052 | 0.088 |
| D23 (mm) | ||||||
| Duan | 0.555 | −0.636 | −0.418 | −0.659 | −0.559 | 0.736 |
| Oberk | −0.323 | 0.203 | −0.353 | 0.268 | −0.177 | 0.384 |
| Our | 0.063 | 0.055 | 0.156 | −0.125 | −0.029 | −0.139 |
| D13 (mm) | ||||||
| Duan | −0.708 | −0.654 | −0.555 | 0.715 | −0.453 | −0.359 |
| Oberk | 0.448 | −0.407 | −0.348 | 0.207 | −0.248 | 0.307 |
| Our | −0.027 | −0.072 | 0.076 | −0.165 | −0.089 | −0.134 |
| Position | |||||
|---|---|---|---|---|---|
| Yaw | 5° | 10° | 15° | 20° | 25° |
| Duan | −0.132 | 0.252 | 0.245 | 0.485 | −0.532 |
| Oberk | −0.056 | −0.154 | −0.147 | 0.284 | −0.334 |
| Our | 0.032 | −0.057 | 0.045 | −0.085 | −0.132 |
| Pitch (error) | 5° | 10° | 15° | 20° | 25° |
| Duan | −0.127 | −0.196 | −0.201 | 0.386 | −0.477 |
| Oberk | 0.046 | 0.177 | −0.186 | 0.295 | 0.402 |
| Our | 0.027 | 0.043 | −0.019 | −0.102 | −0.137 |
| Roll | 5° | 10° | 15° | 20° | 25° |
| Duan | 0.129 | −0.267 | 0.245 | −0.399 | −0.489 |
| Oberk | 0.036 | −0.200 | −0.196 | 0.247 | −0.374 |
| Our | −0.026 | −0.052 | 0.049 | 0.093 | 0.140 |
| Frame 1 | Frame 2 | Frame 3 | Frame 4 | |
|---|---|---|---|---|
| Duan (°) | ||||
| Yaw | −0.845 | −0.831 | −0.776 | 0.766 |
| Pitch | 0.476 | −0.552 | 0.544 | 0.422 |
| Roll | −0.577 | 0.430 | 0.402 | −0.427 |
| Oberk (°) | ||||
| Yaw | −0.560 | −0.620 | −0.688 | −0.644 |
| Pitch | 0.410 | −0.374 | −0.397 | 0.294 |
| Roll | −0.355 | −0.288 | 0.362 | −0.403 |
| Our (°) | ||||
| Yaw | −0.345 | 0.344 | 0.286 | −0.374 |
| Pitch | −0.177 | −0.186 | −0.211 | 0.204 |
| Roll | −0.222 | −0.199 | 0.175 | 0.232 |
| Position 1 | Position 2 | Position 3 | Position 4 | Position 5 | Position 6 | |
|---|---|---|---|---|---|---|
| Yaw (°) | 0.411 | 0.384 | 0.192 | 0.189 | 0.477 | 0.512 |
| Pitch (°) | 0.400 | 0.372 | 0.186 | 0.177 | 0.444 | 0.504 |
| Roll (°) | 0.394 | 0.346 | 0.174 | 0.185 | 0.500 | 0.523 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Zhang, S.; Li, Q. Robust and Accurate Vision-Based Pose Estimation Algorithm Based on Four Coplanar Feature Points. Sensors 2016, 16, 2173. https://doi.org/10.3390/s16122173
Zhang Z, Zhang S, Li Q. Robust and Accurate Vision-Based Pose Estimation Algorithm Based on Four Coplanar Feature Points. Sensors. 2016; 16(12):2173. https://doi.org/10.3390/s16122173
Chicago/Turabian StyleZhang, Zimiao, Shihai Zhang, and Qiu Li. 2016. "Robust and Accurate Vision-Based Pose Estimation Algorithm Based on Four Coplanar Feature Points" Sensors 16, no. 12: 2173. https://doi.org/10.3390/s16122173