
A Wide-Swath Spaceborne TOPS SAR Image Formation Algorithm Based on Chirp Scaling and Chirp-Z Transform


Abstract
:
1. Introduction
2. Signal Model of TOPS Mode
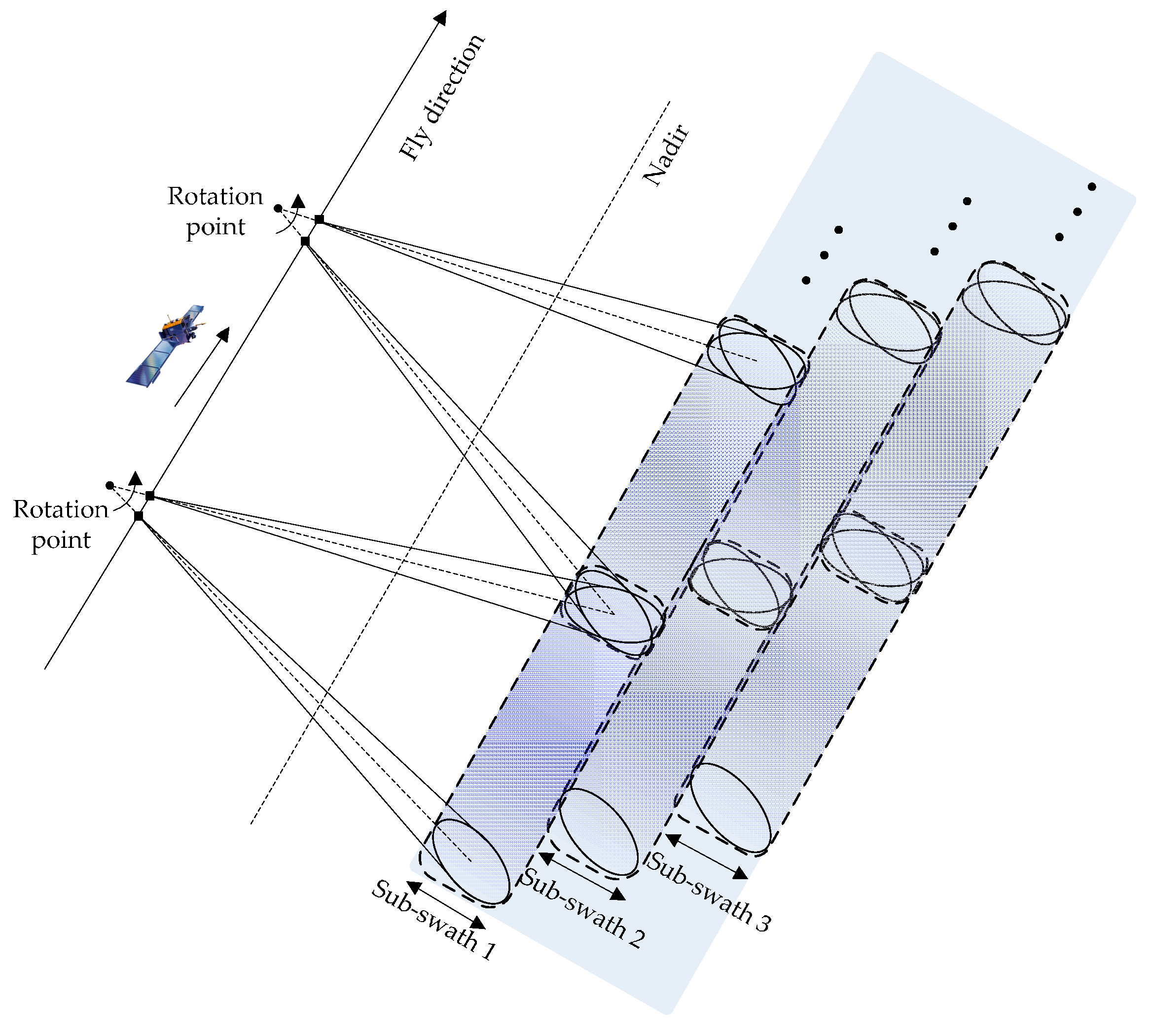
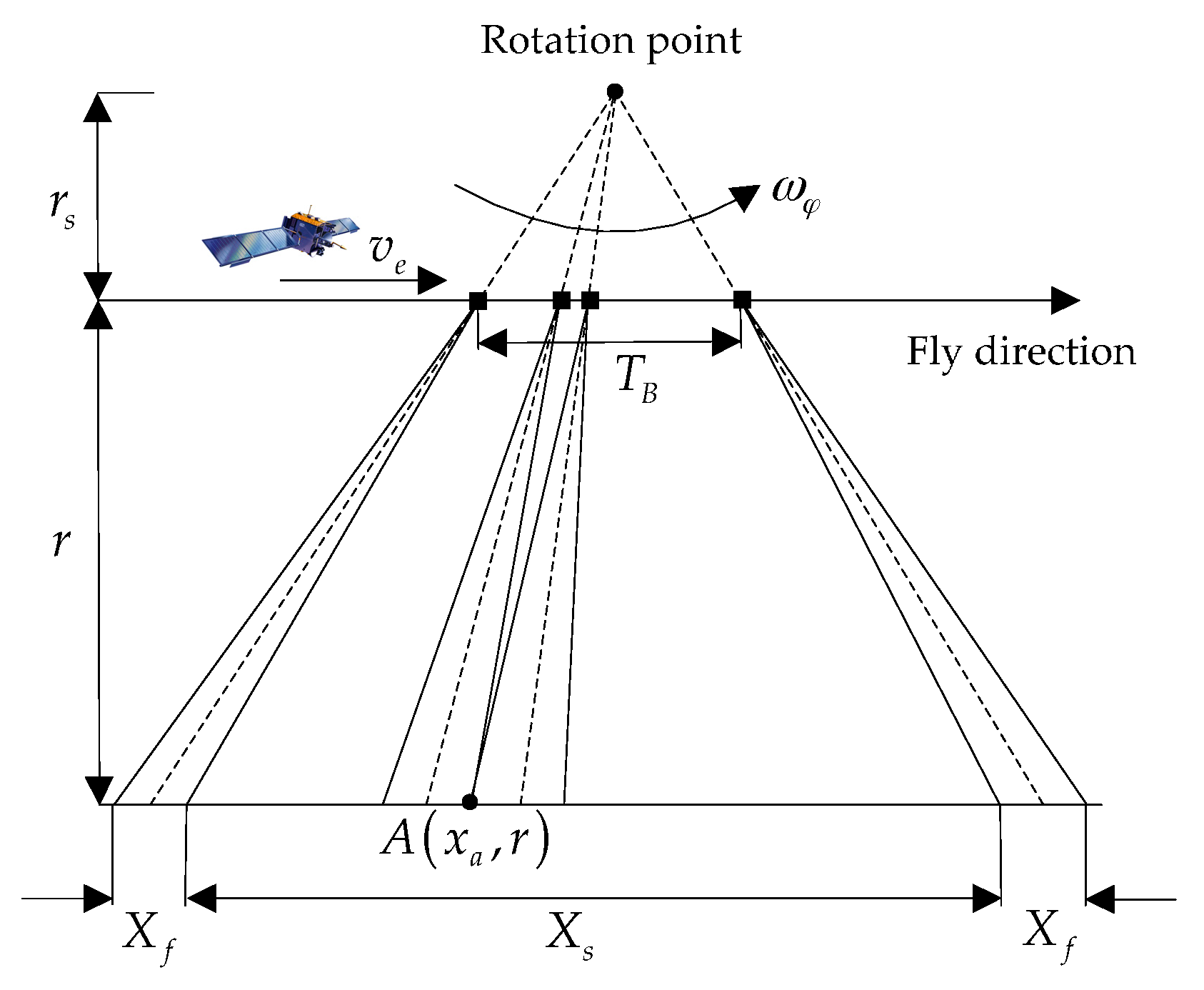
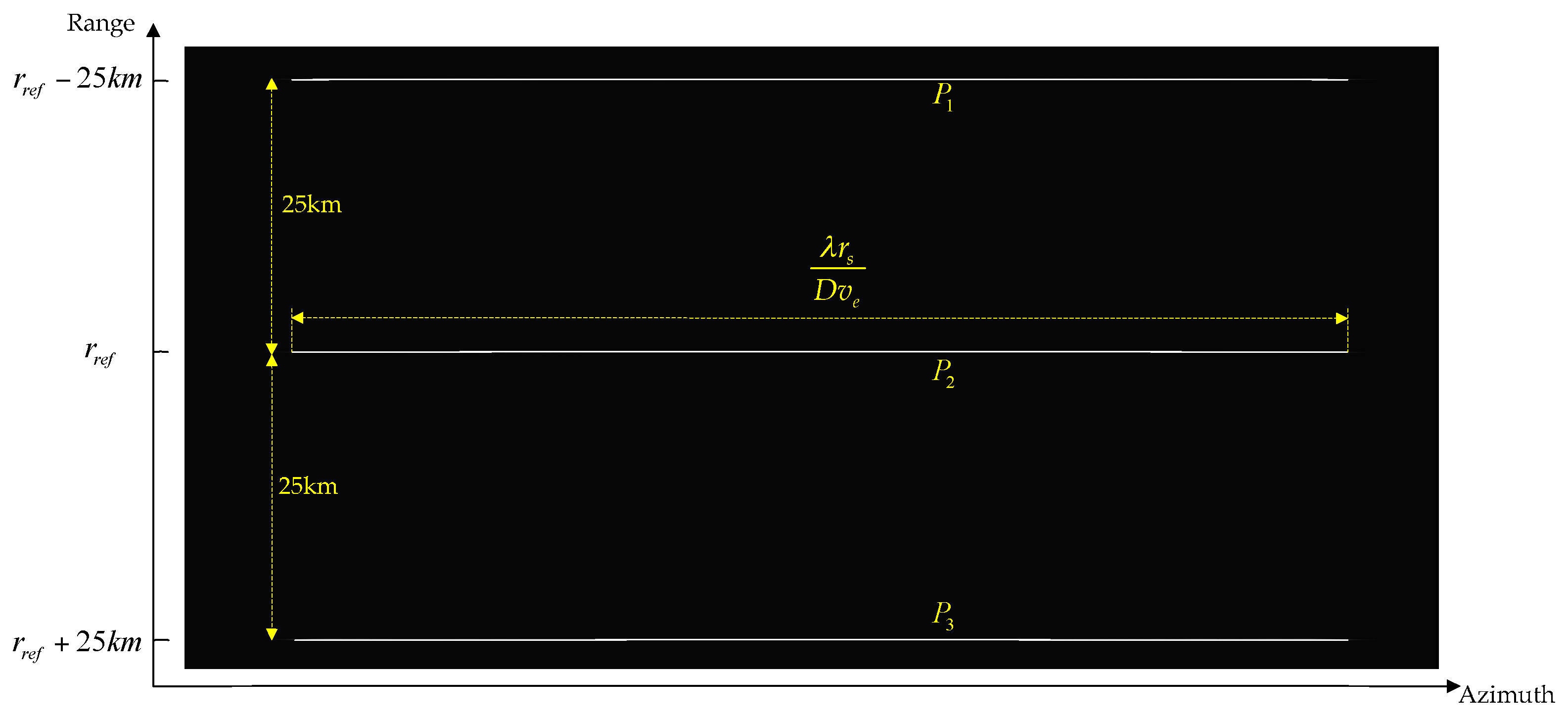
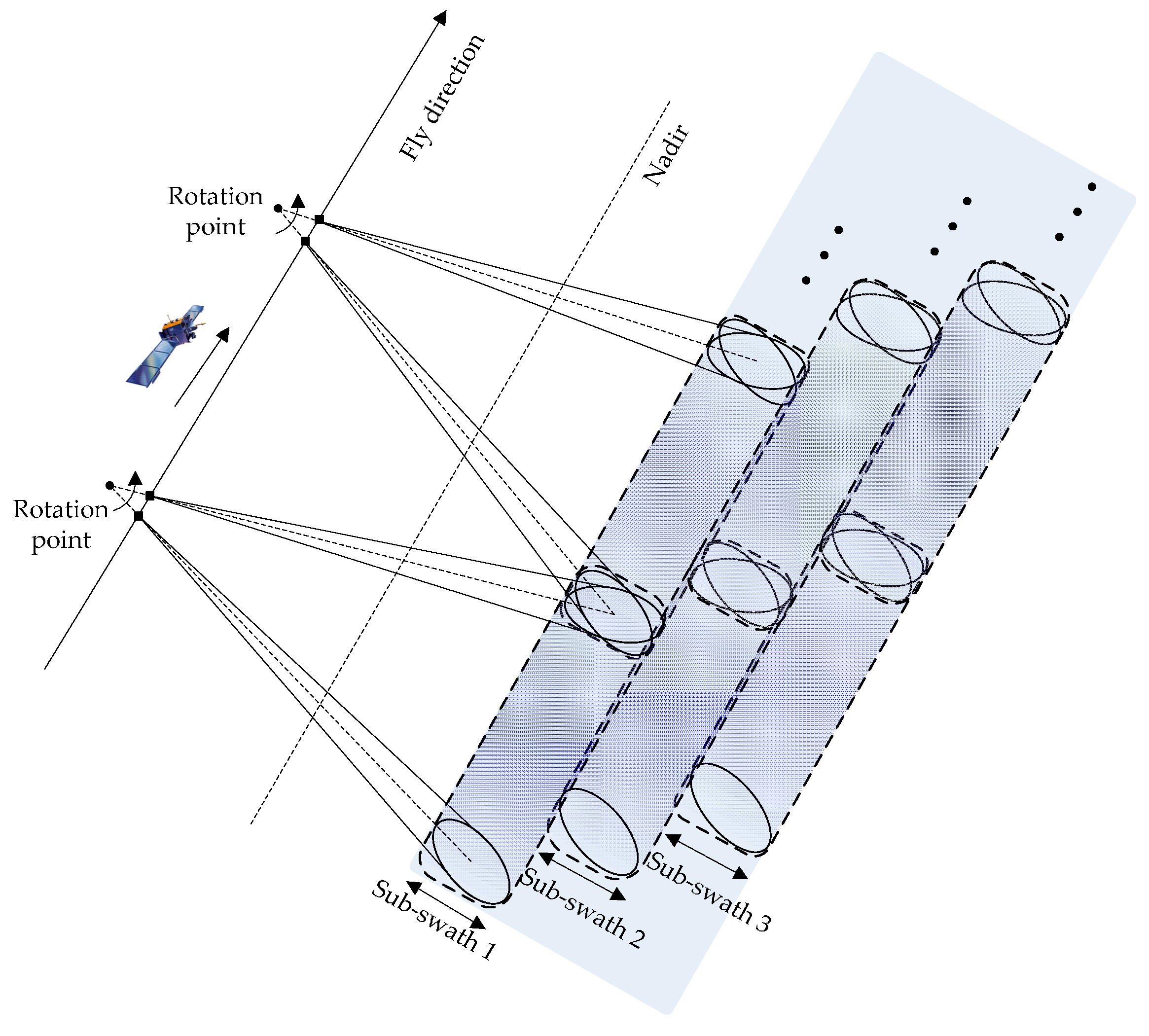
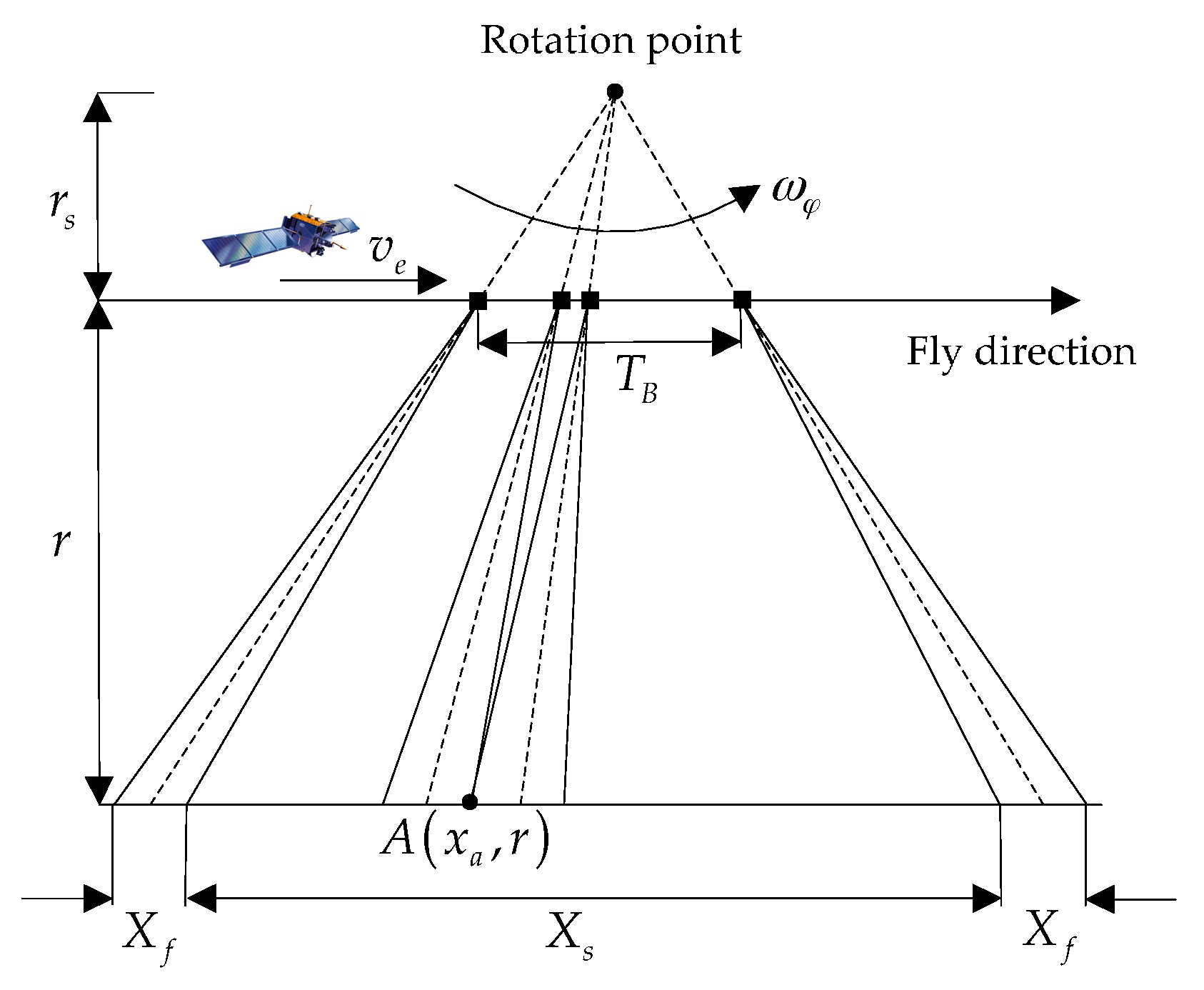
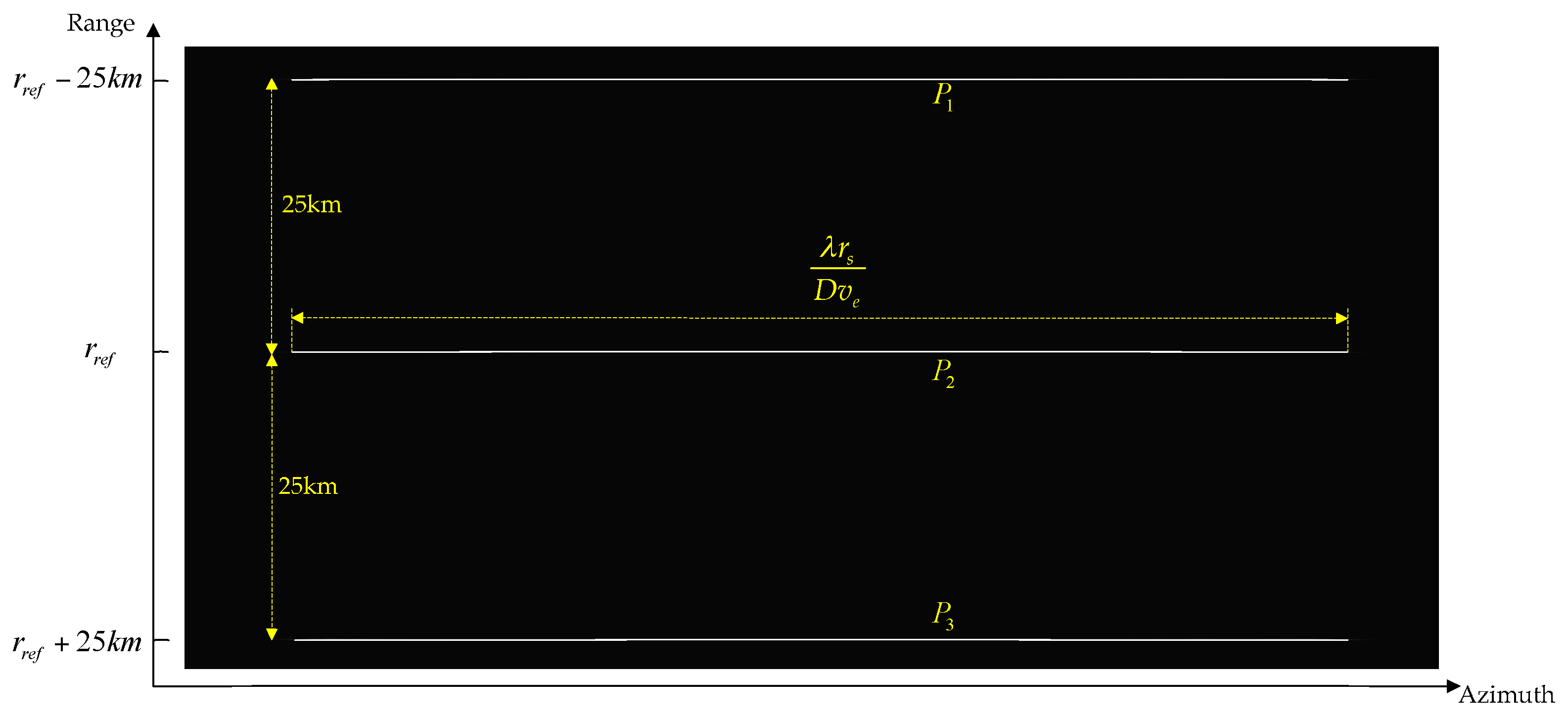
2.1. Acquisition Geometry
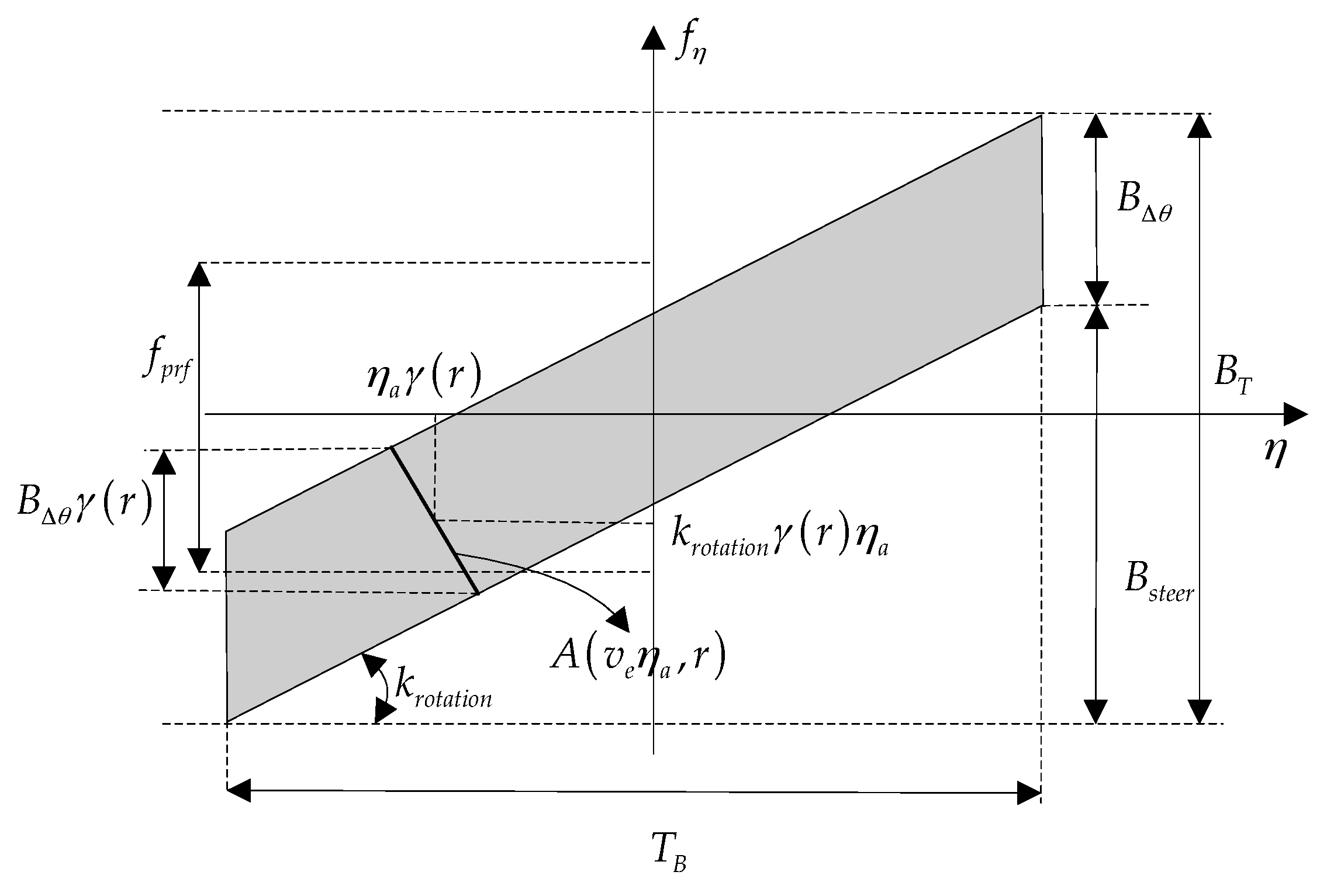
2.2. Signal Model
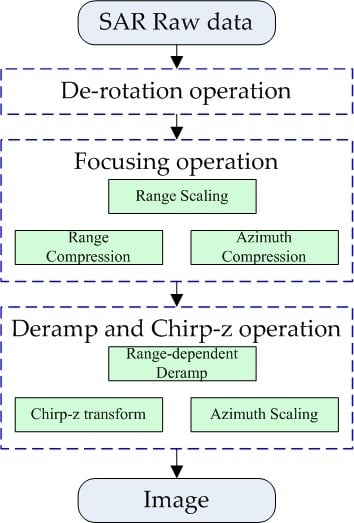
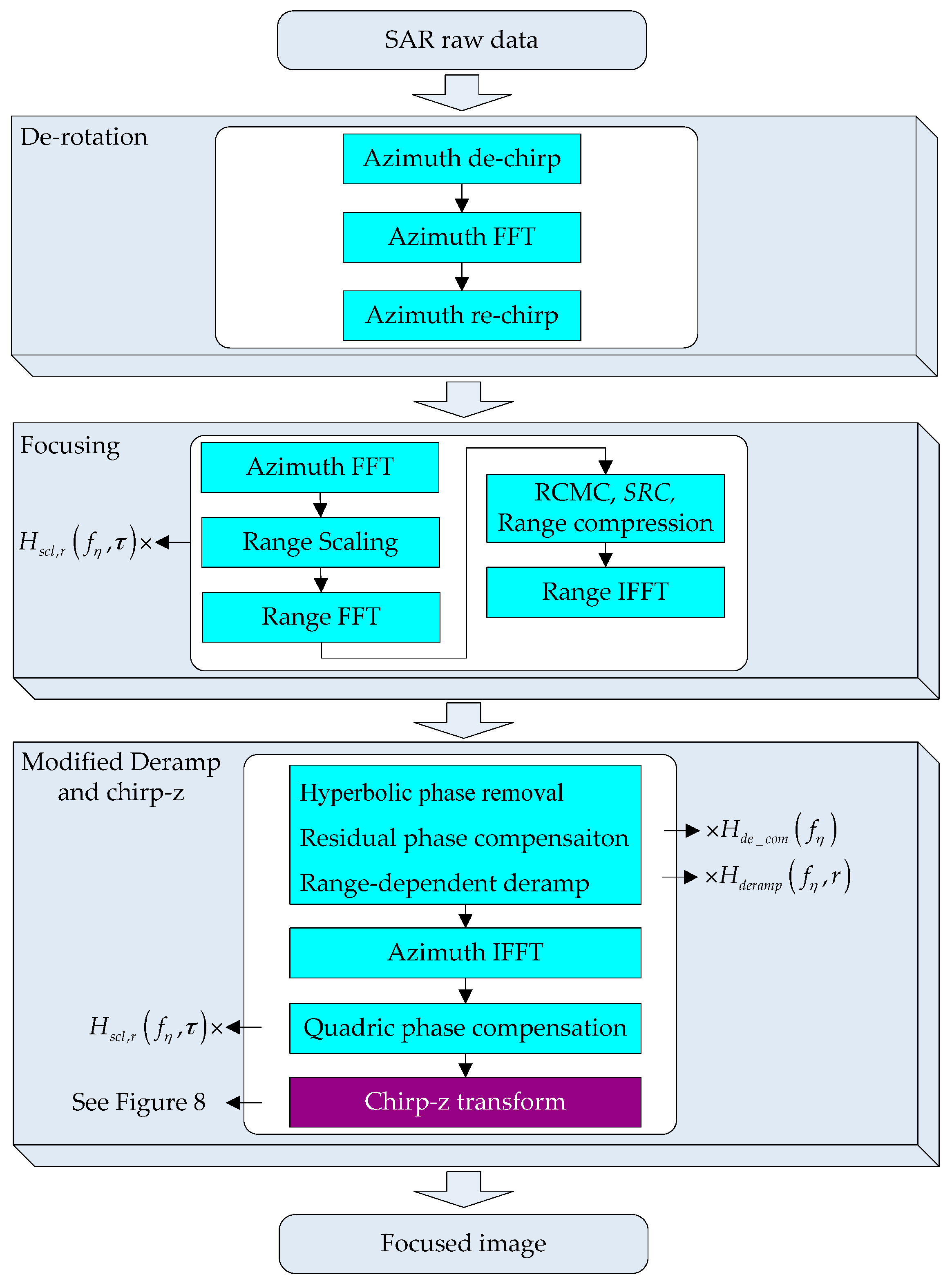
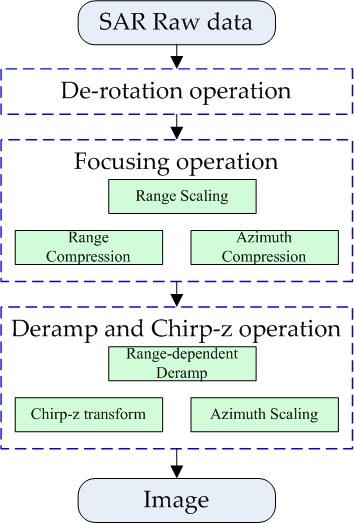
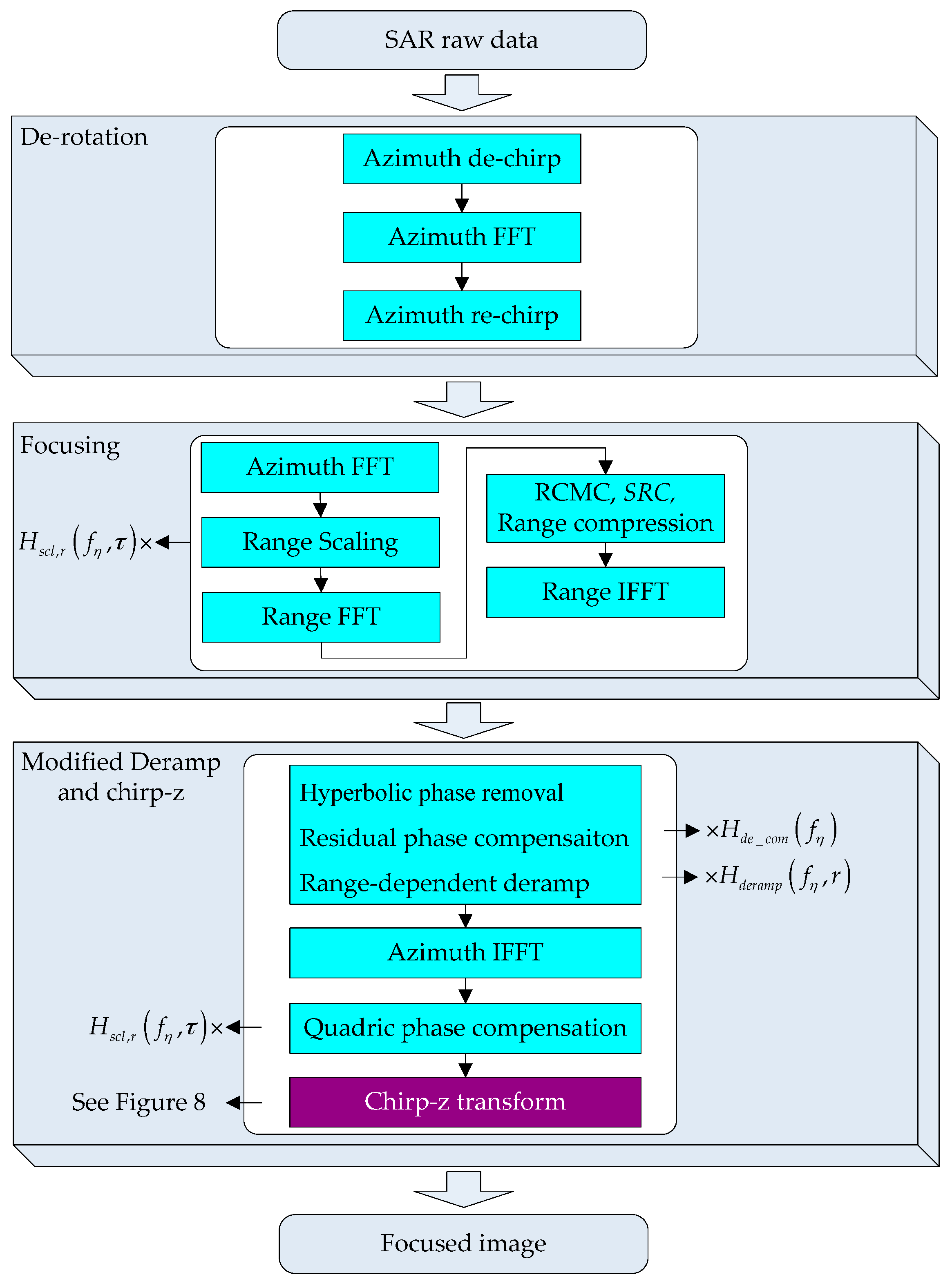
3. Imaging Algorithm
3.1. Azimuth De-Rotation
3.2. Range Scaling
3.3. Azimuth Deramp
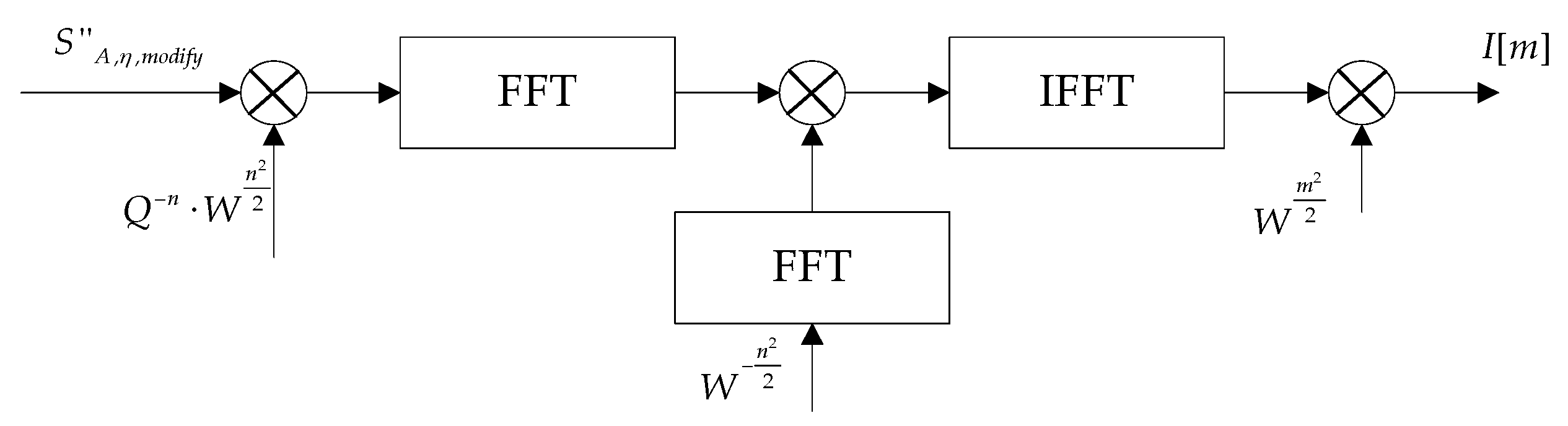
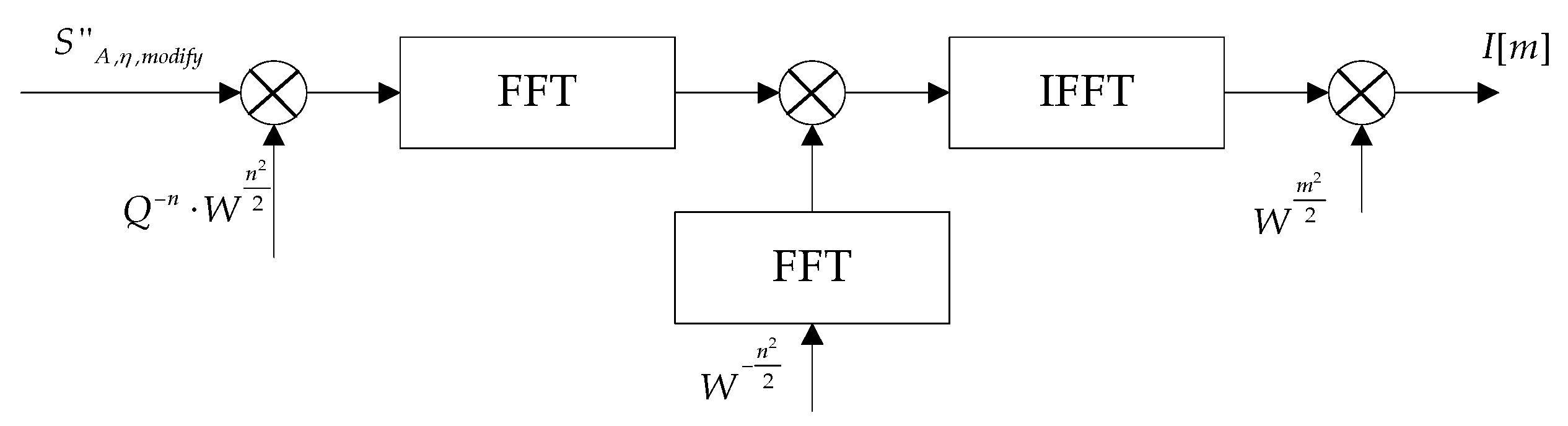
3.4. Modified Azimuth Deramp and Chirp-z
4. Simulation Results and Discussion
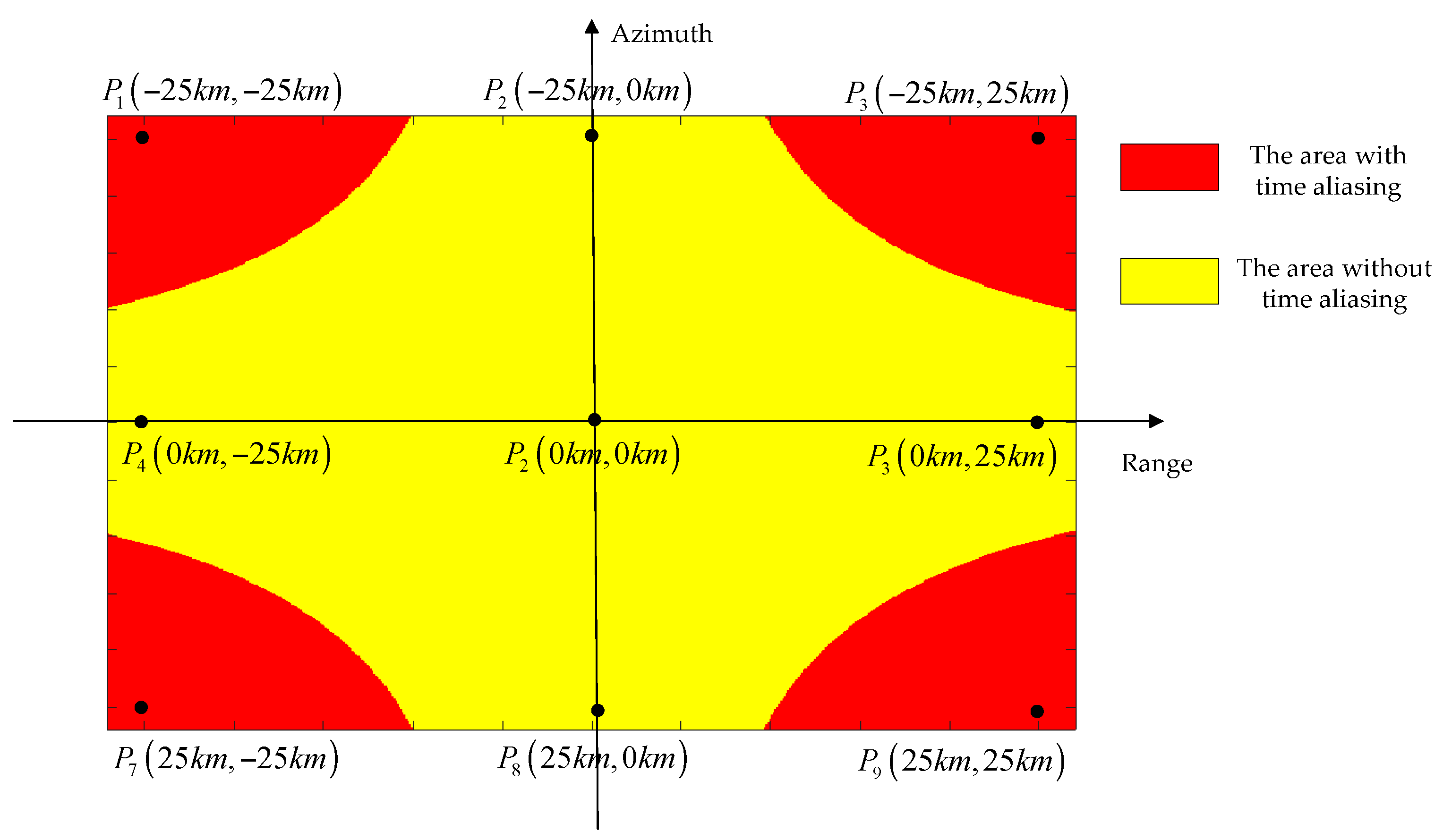
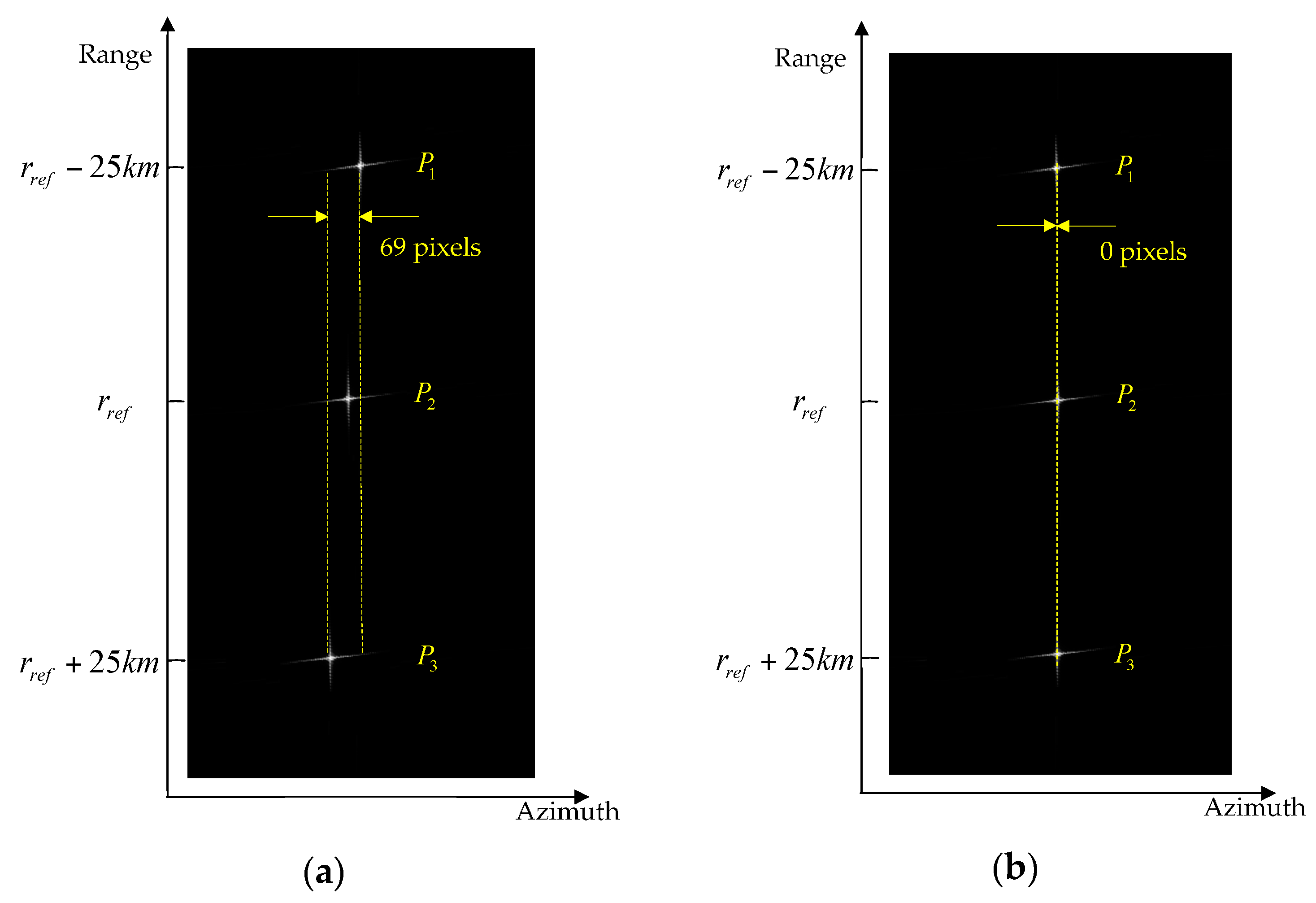
4.1. Comparative Experiments and Discussion
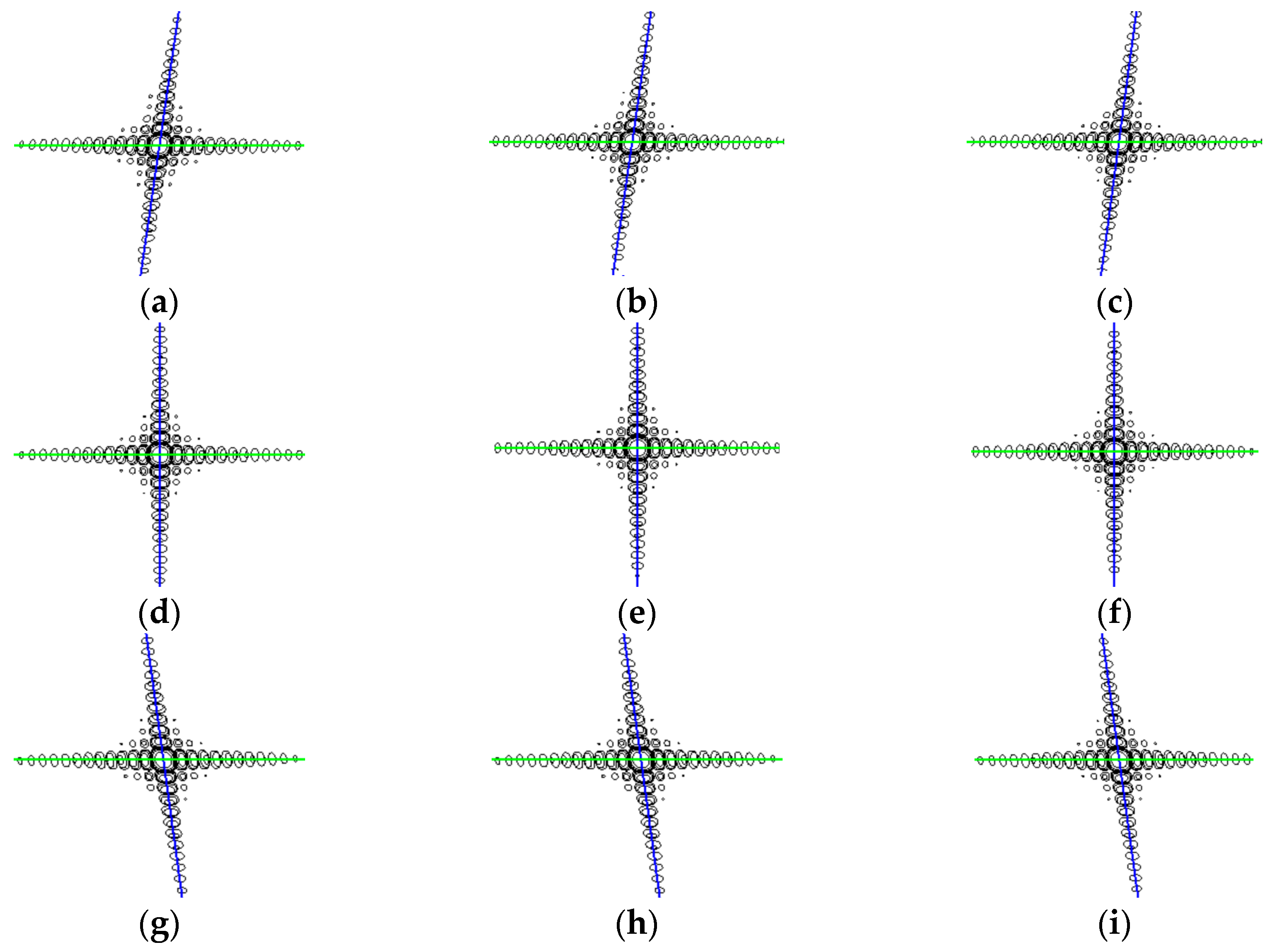
4.2. Imaging Simulation Experiments and Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zan, F.D.; Guarnieri, A.M. TOPSAR: Terrain Observation by Progressive Scans. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2352–2360. [Google Scholar] [CrossRef]
- Meta, A.; Mittermayer, J.; Steinbrecher, U.; Prats, P. Investigations on the TOPSAR Acquisition Mode with TerraSAR-X. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2007), Barcelona, Spain, 23–28 July 2007; pp. 152–155.
- Meta, A.; Prats, P.; Steinbrecher, U.; Mttermayer, J.; Scheiber, R. TerraSAR-X TOPSAR and ScanSAR Comparison. In Proceedings of the 2008 7th European Conference on Synthetic Aperture Radar (EUSAR), Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4.
- Scheiber, R.; Wollstadt, S.; Sauer, S.; Malz, E.; Mittermayer, J.; Prats, P. Sentinel-l Imaging Performance Verification with TerraSAR-X. In Proceedings of the 2010 8th European Conference on Synthetic Aperture Radar (EUSAR), Eurogress, Germany, 7–10 June 2010; pp. 55–58.
- Meta, A.; Mittermayer, J.; Prats, P.; Scheiber, R.; Steinbrecher, U. TOPS Imaging with TerraSAR-X: Mode Design and Performance Analysis. IEEE Trans. Geosci. Remote Sens. 2010, 48, 759–769. [Google Scholar] [CrossRef] [Green Version]
- Bello, J.L.B.; Martone, M.; Kraus, T.; Prats-Iraola, P.; Bräutigam, B. Performance Evaluation of TanDEM-X Experimental Modes. In Proceedings of the 10th European Conference on Synthetic Aperture Radar (EUSAR 2014), Berlin, Germany, 3–5 June 2014; pp. 284–287.
- Janoth, J.; Gantert, S.; Schrage, T.; Kaptein, A. TerraSAR Next Generation-mission Capabilities. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 2297–2300.
- Prati, C.; Guarnieri, A.M.; Rocca, F. SPOT Mode SAR Focusing with the ω-k Technique. In Proceedings of the IEEE 11th Annual International Geoscience and Remote Sensing Symposium, Espoo, Finland, 3–6 June 1991; pp. 631–634.
- Prats, P.; Scheiber, R.; Mittermayer, J.; Meta, A.; Moreira, A.; Sanz-Marcos, J. A SAR Processing Algorithm for TOPS Imaging Mode Based on Extended Chirp Scaling. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2007), Barcelona, Spain, 23–28 July 2007; pp. 148–151.
- Prats, P.; Scheiber, R.; Mittermayer, J.; Moreira, A. Processing Multiple SAR Modes with Baseband Azimuth Scaling. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2009), Cape Town, South Africa, 12–17 July 2009; pp. 172–175.
- Prats, P.; Scheiber, R.; Mittermayer, J.; Meta, A.; Moreira, A. Processing of Sliding Spotlight and TOPS SAR Data Using Baseband Azimuth Scaling. IEEE Trans. Geosci. Remote Sens. 2010, 48, 770–780. [Google Scholar] [CrossRef]
- Yang, W.; Li, C.S.; Chen, J.; Wang, P.B. A Novel Three-step Focusing Algorithm for TOPSAR Image Formation. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 4087–4090.
- Yang, W.; Chen, J.; Zeng, H.C.; Zhou, J.; Wang, P.B.; Li, C.S. A Novel Three-step Image Formation Scheme for Unified Focusing on Spaceborne SAR Data. Prog. Electromagn. Res. 2013, 137, 621–642. [Google Scholar] [CrossRef]
- Moreira, A.; Mittermayer, J.; Scheiber, R. Extended Chirp Scaling Algorithm for Air- and Spaceborne SAR Data Processing in Stripmap and ScanSAR Imaging Modes. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1123–1136. [Google Scholar] [CrossRef]
- Xu, W.; Huang, P.P.; Deng, Y.K.; Sun, J.T.; Shang, X.Q. An Efficient Approach with Scaling Factors for TOPS-Mode SAR Data Focusing. IEEE Geosci. Remote Sens. Lett. 2011, 8, 929–933. [Google Scholar] [CrossRef]
- Xu, W.; Huang, P.P.; Wang, R.; Deng, Y.K.; Lu, Y.C. TOPS-Mode Raw Data Processing Using Chirp Scaling Algorithm. IEEE J. Sel. Topics Appl. Earth Observ. 2014, 7, 235–246. [Google Scholar] [CrossRef]
- Rodon, J.R.; Broquetas, A.; Arbesú, J.M.G.; Closa, J.; Labriola, M. Signal-to-Noise Ratio Equalization for TOPSAR Mode Using a Nonuniform Steering Rate. IEEE Geosci. Remote Sens. Lett. 2012, 9, 199–203. [Google Scholar] [CrossRef]
- Prats-IraoIa, P.; Scheiber, R.; Marotti, L.; Wollstadt, S.; Reigber, A. TOPS Interferometry with TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3179–3188. [Google Scholar] [CrossRef]
- Scheiber, R.; Jäger, M.; Prats-Iraola, P.; Zan, F.D.; Geudtner, D. Speckle Tracking and Interferometric Processing of TerraSAR-X TOPS Data for Mapping Nonstationary Scenarios. IEEE J. Sel. Topics Appl. Earth Observ. 2015, 8, 1709–1720. [Google Scholar] [CrossRef]
- Yague-Martinez, N.; Prats-Iraola, P.; Gonzalez, F.R.; Brcic, R.; Shau, R.; Geudtner, D.; Eineder, M.; Bamler, R. Interferometric Processing of Sentinel-1 TOPS Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2220–2234. [Google Scholar] [CrossRef]
- Gebert, N.; Krieger, G.; Moreira, A. Multichannel Azimuth Processing in ScanSAR and TOPS Mode Operation. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2994–3008. [Google Scholar] [CrossRef]
- Raney, R.K.; Runge, H.; Bamler, R.; Cumming, I.G.; Wong, F.H. Precision SAR Processing Using Chirp Scaling. IEEE Trans. Geosci. Remote Sens. 1994, 32, 786–799. [Google Scholar] [CrossRef]
- Bamler, R. A Comparison of Range-Doppler and Wavenumber Domain SAR Focusing Algorithms. IEEE Trans. Geosci. Remote Sens. 1992, 30, 706–713. [Google Scholar] [CrossRef]
- Lanari, R.; Tesauro, M.; Sansosti, E.; Fornaro, G. Spotlight SAR Data Focusing Based on a Two-Step Processing Approach. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1993–2004. [Google Scholar] [CrossRef]
- Lanari, R.; Zoffoli, S.; Sansosti, E.; Fornaro, G.; Serafino, F. New Approach for Hybrid Strip-map/spotlight SAR Data Focusing. IEE Proc. Radar Sonar Navig. 2001, 148, 363–372. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Yang, W. The Limitation for Spaceborne SAR TOPS Imaging Mode Design Due to Data Processing. In Proceedings of the ICCNE, Chiang Mai, Thailand, 21–23 November 2015; pp. 1–4.
- Rabiner, L.R.; Schafer, R.W.; Rader, C.M. The Chirp Z-Transform Algorithm. IEEE Trans. Audio Electroacust. 1969, 17, 86–92. [Google Scholar] [CrossRef]
- Lanari, R. A New Method for the Compensation of the SAR Range Cell Migration Based on the Chirp Z-Transform. IEEE Trans. Geosci. Remote Sens. 1995, 33, 1296–1299. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Orbit height | 630 km |
| Eccentricity | 0.0011 |
| Orbit inclination angle | 97 deg |
| Argument of perigee | 90 deg |
| Elevation | 30 deg |
| Wavelength | 0.03 m |
| PRF | 5000 Hz |
| Antenna length | 5.0 m |
| LFM Signal bandwidth | 50.0 MHz |
| LFM Signal sampling rate | 60.0 MHz |
| Azimuth swath | 50 km |
| Range swath | 50 km |
| Latitude of scene center | 0 deg |
| Raw data type | 64-bit complex |
| Point Targets | Algorithms | Azimuth | Range | ||||
|---|---|---|---|---|---|---|---|
| Resolution (m) | PSLR (dB) | ISLR (dB) | Resolution (m) | PSLR (dB) | ISLR (dB) | ||
| Traditional algorithm | 16.30 | −12.82 | −10.15 | 2.71 | −12.76 | −9.68 | |
| Proposed algorithm | 12.33 | −13.25 | −10.10 | 2.66 | −13.26 | −10.11 | |
| Traditional algorithm | 12.51 | −13.26 | −10.13 | 2.66 | −13.13 | −10.05 | |
| Proposed algorithm | 12.50 | −13.25 | −10.11 | 2.66 | −13.25 | −10.11 | |
| Traditional algorithm | 16.39 | −13.65 | −11.28 | 2.68 | −13.31 | −10.00 | |
| Proposed algorithm | 12.68 | −13.26 | −10.12 | 2.66 | −13.27 | −10.10 | |
| Point Targets | Azimuth | Range | ||||
|---|---|---|---|---|---|---|
| Resolution(m) | PSLR (dB) | ISLR (dB) | Resolution(m) | PSLR (dB) | ISLR (dB) | |
| 12.33 | −13.25 | −10.10 | 2.66 | −13.26 | −10.11 | |
| 12.50 | −13.25 | −10.11 | 2.66 | −13.25 | −10.11 | |
| 12.68 | −13.26 | −10.12 | 2.66 | −13.27 | −10.10 | |
| 12.33 | −13.25 | −10.10 | 2.66 | −13.26 | −10.11 | |
| 12.50 | −13.25 | −10.11 | 2.66 | −13.26 | −10.11 | |
| 12.67 | −13.25 | −10.12 | 2.66 | −13.27 | −10.10 | |
| 12.34 | −13.25 | −10.11 | 2.66 | −13.26 | −10.10 | |
| 12.51 | −13.26 | −10.12 | 2.66 | −13.27 | −10.11 | |
| 12.68 | −13.25 | −10.10 | 2.66 | −13.27 | −10.10 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Chen, J.; Zeng, H.C.; Wang, P.B.; Liu, W. A Wide-Swath Spaceborne TOPS SAR Image Formation Algorithm Based on Chirp Scaling and Chirp-Z Transform. Sensors 2016, 16, 2095. https://doi.org/10.3390/s16122095
Yang W, Chen J, Zeng HC, Wang PB, Liu W. A Wide-Swath Spaceborne TOPS SAR Image Formation Algorithm Based on Chirp Scaling and Chirp-Z Transform. Sensors. 2016; 16(12):2095. https://doi.org/10.3390/s16122095
Chicago/Turabian StyleYang, Wei, Jie Chen, Hong Cheng Zeng, Peng Bo Wang, and Wei Liu. 2016. "A Wide-Swath Spaceborne TOPS SAR Image Formation Algorithm Based on Chirp Scaling and Chirp-Z Transform" Sensors 16, no. 12: 2095. https://doi.org/10.3390/s16122095