
Estimating Leaf Area Index (LAI) in Vineyards Using the PocketLAI Smart-App

Abstract
:1. Introduction
2. Materials and Methods
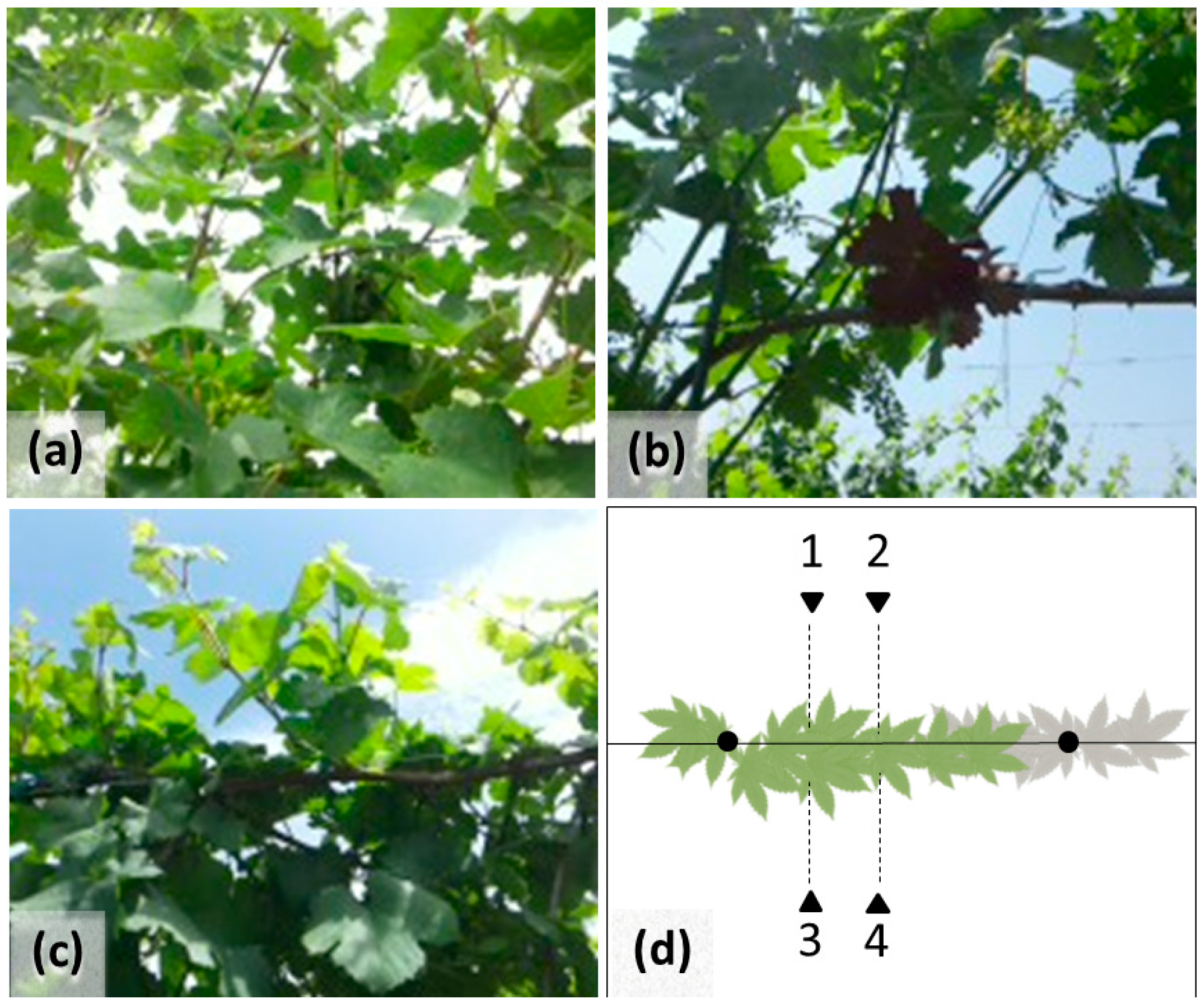
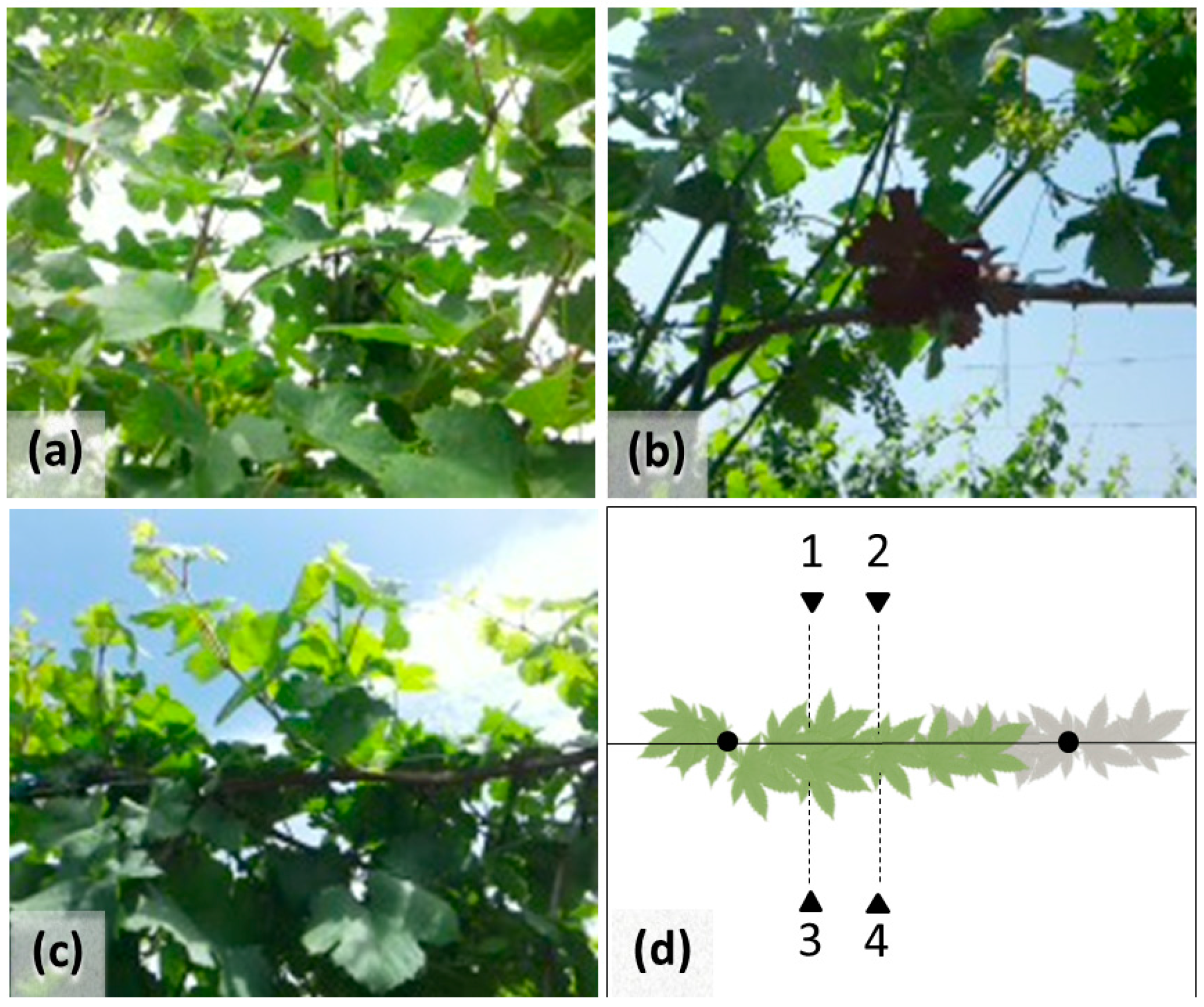
2.1. Survey Scheme
2.2. Indirect LAI Estimates
2.3. Destructive LAI Measurement
2.4. Data Analysis
3. Results
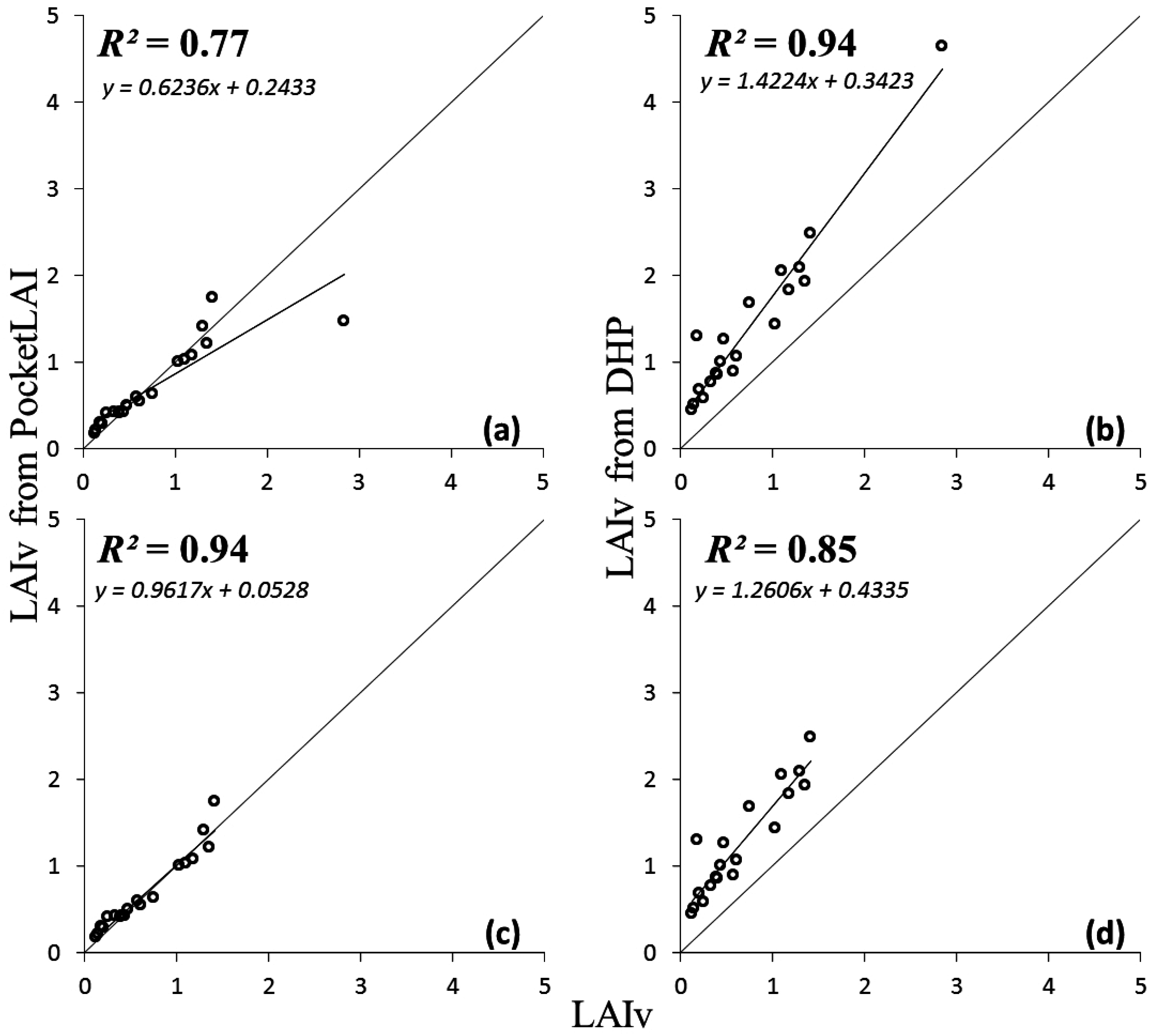
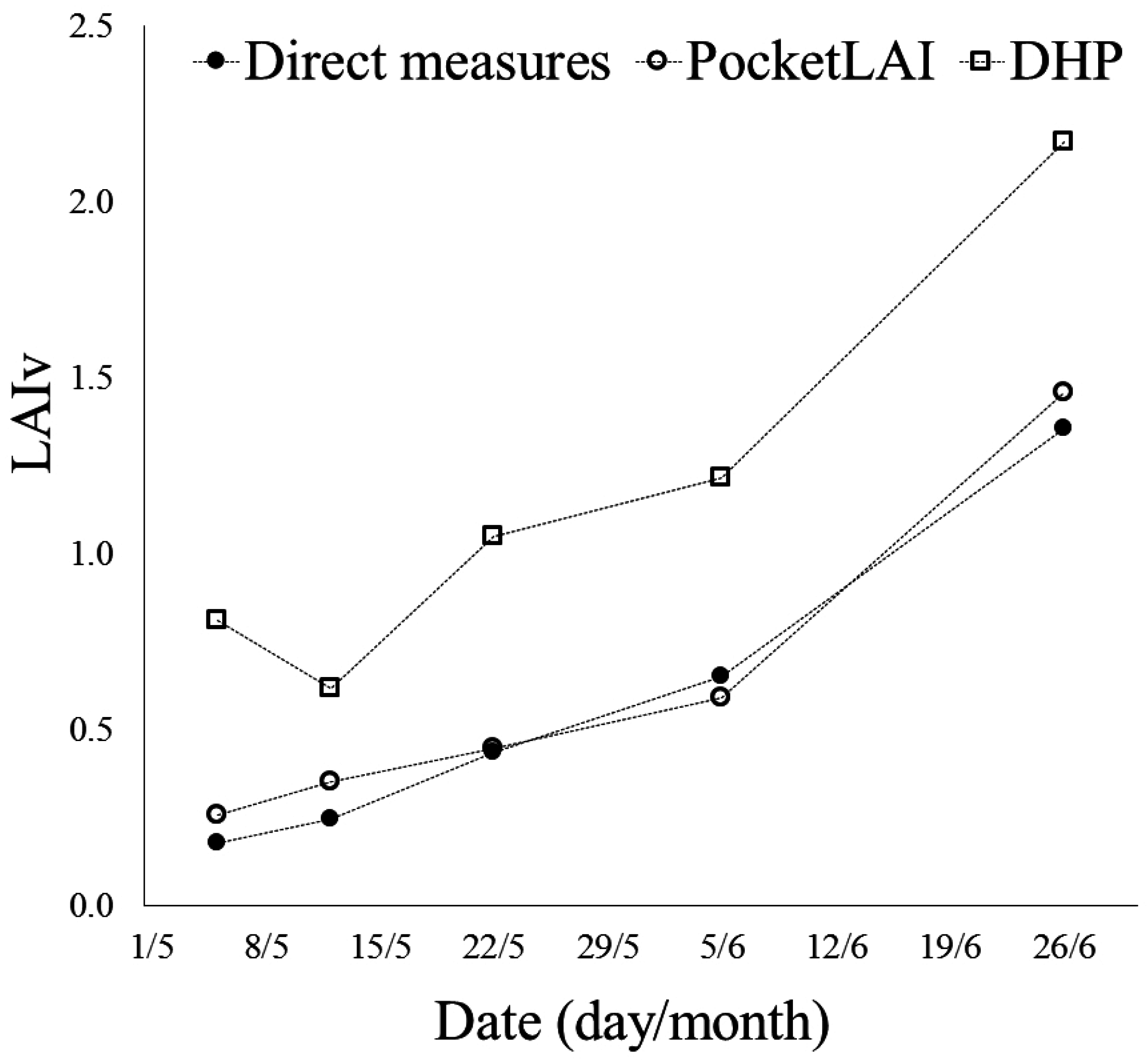
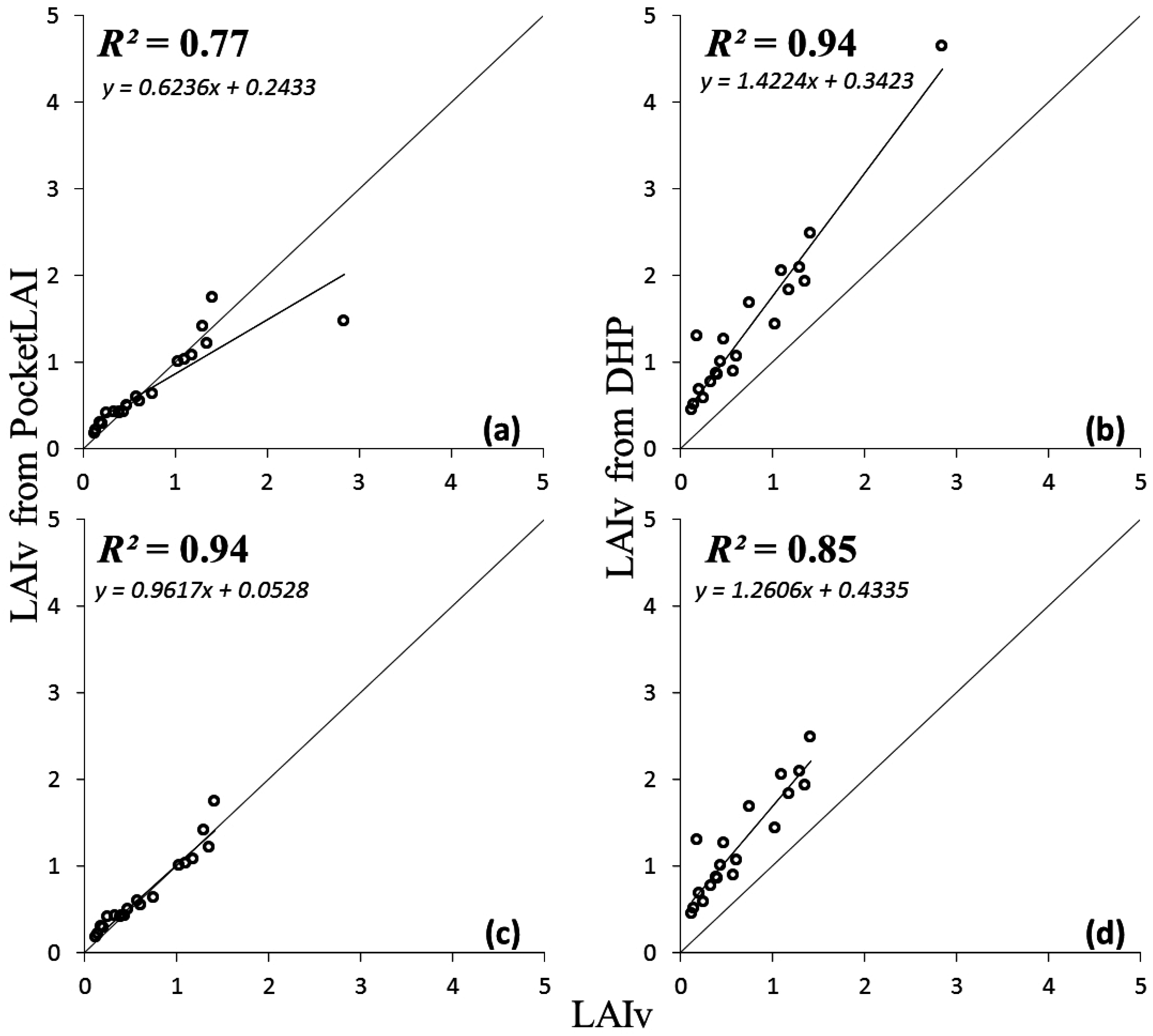
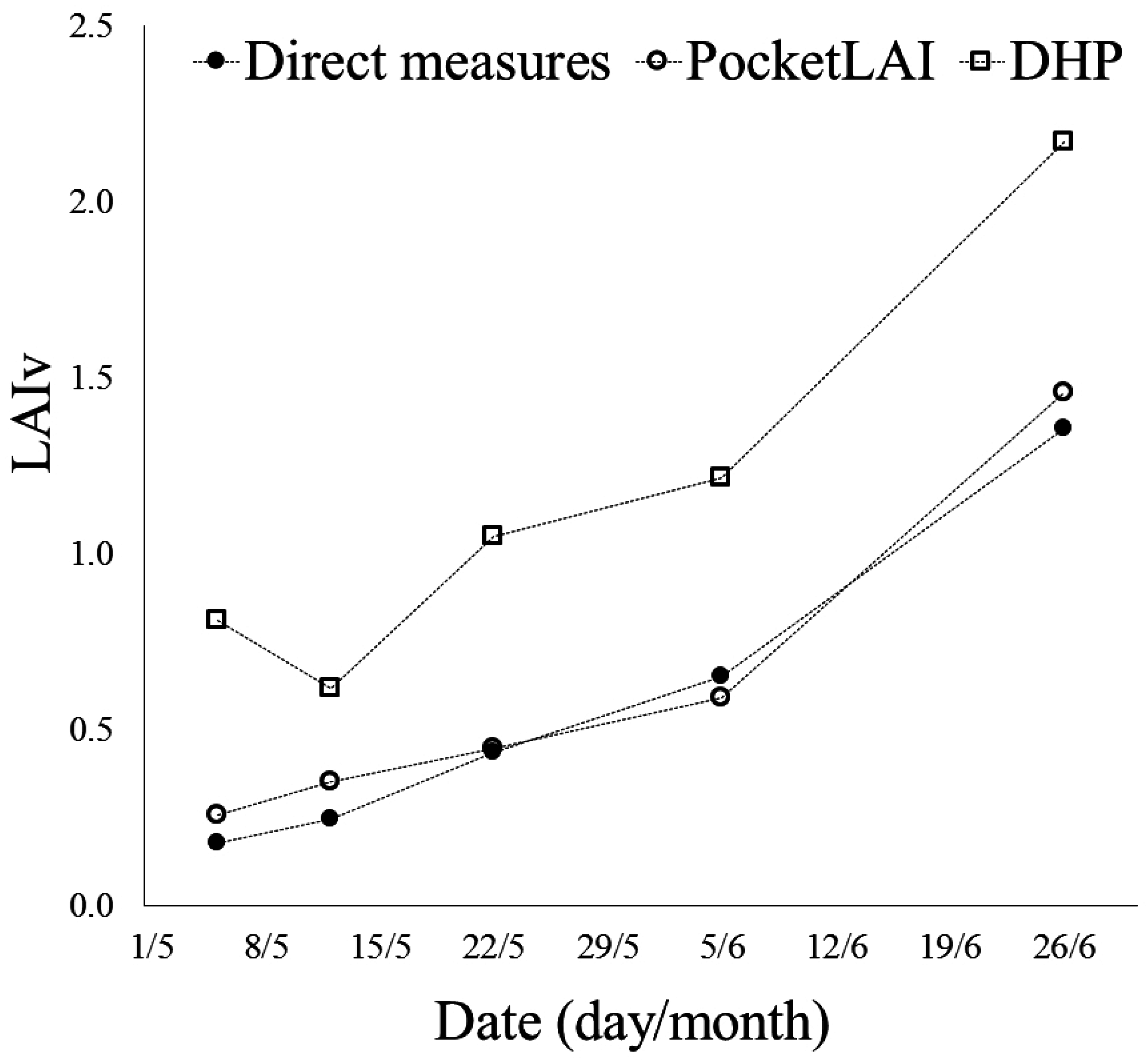
3.1. Performance of Indirect Methods
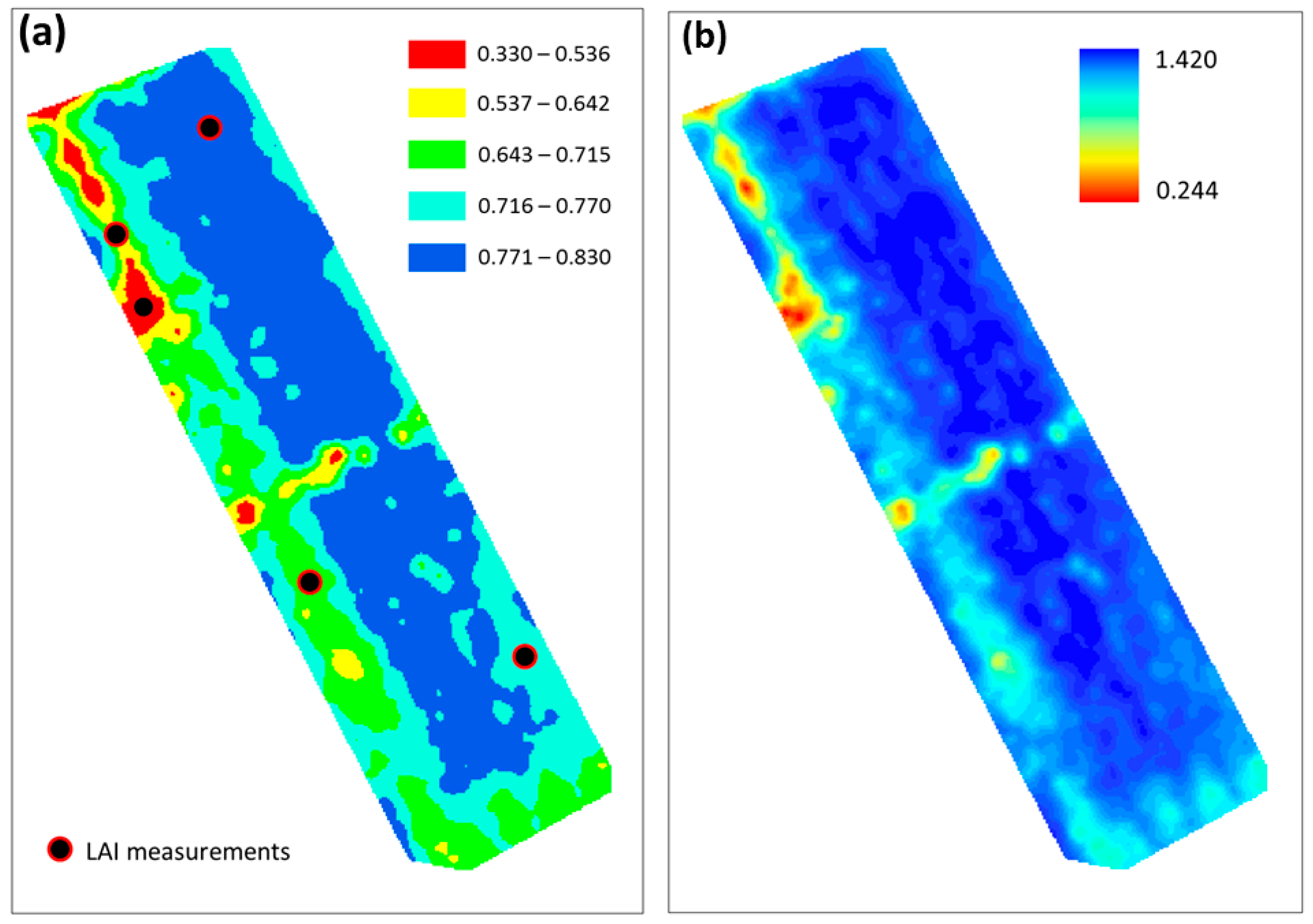
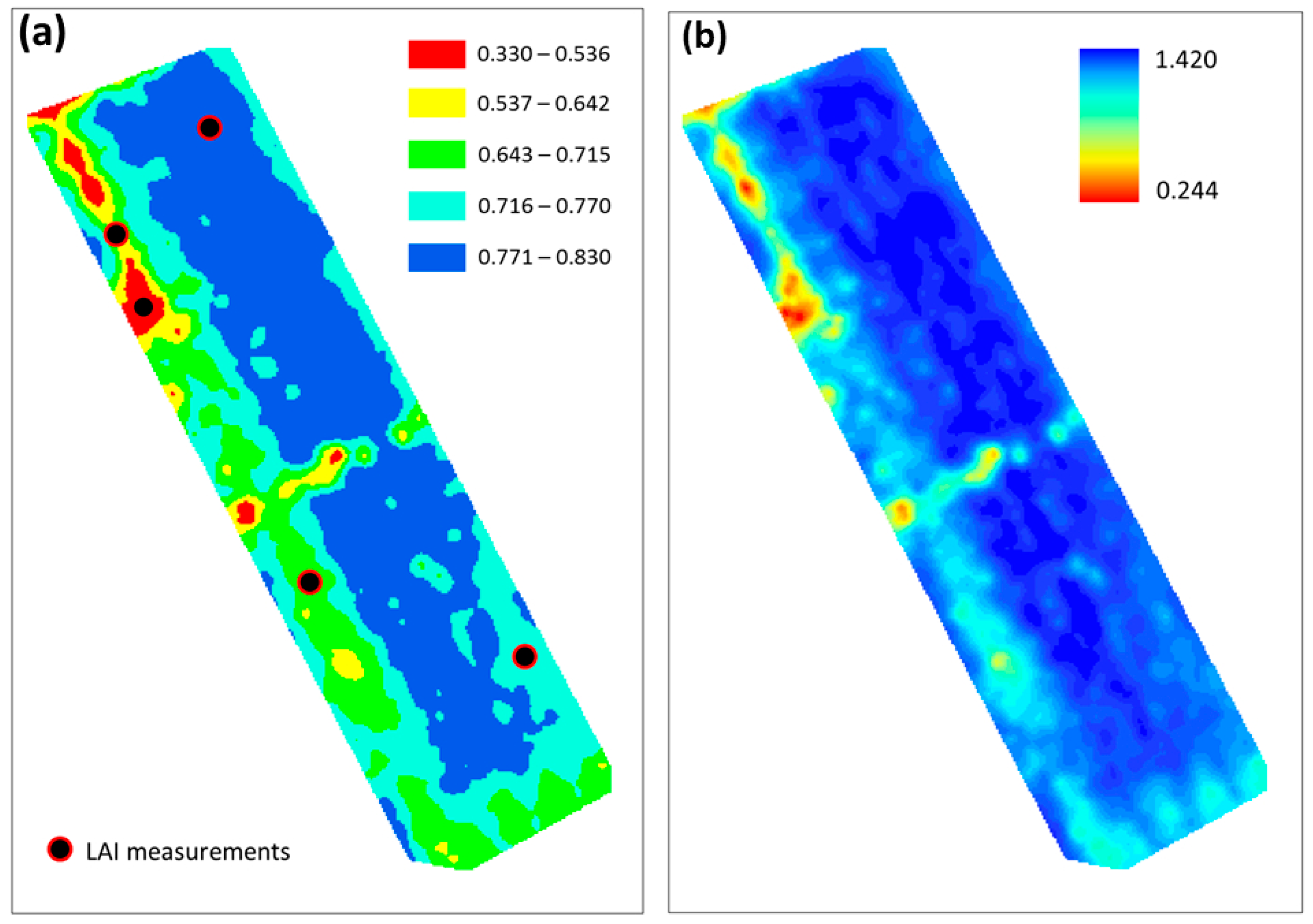
3.2. PocketLAI and NDVI
4. Discussion
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Watson, D.J. Comparative physiological studies on the growth of field crops: I. Variation in net assimilation rate and leaf area between species and varieties, and within and between years. Ann. Bot. Lond. 1947, 11, 41–76. [Google Scholar] [CrossRef]
- Dokoozlian, N.; Kliewer, W. The light environment within grapevine canopies. II. Influence of leaf area density on fruit zone light environment and some canopy assessment. Am. J. Enol. Vitic. 1995, 46, 219–226. [Google Scholar]
- Winkler, A.J. The relation of leaf area and climate to vine performance and grape quality. Am. J. Enol. Vitic. 1958, 9, 10–23. [Google Scholar]
- Smart, R.E. Principles of grapevine canopy microclimate manipulation with implications for yield and quality. A review. Am. J. Enol. Vitic. 1985, 36, 230–239. [Google Scholar]
- Cunha, M.; Marçal, A.R.S.; Silva, L. Very early prediction of wine yield based on satellite data from VEGETATION. Int. J. Remote Sens. 2010, 31, 3125–3142. [Google Scholar] [CrossRef]
- Williams, L.E.; Ayars, J.E. Grapevine water use and the crop coefficient are linear functions of the shaded area measured beneath the canopy. Agric. For. Meteorol. 2005, 132, 201–211. [Google Scholar] [CrossRef]
- English, J.; Thomas, C.; Marois, J.; Gubler, W. Microclimates of grapevine canopies associated with leaf removal and control of Botrytis bunch rot. Phytopathology 1989, 79, 395–401. [Google Scholar] [CrossRef]
- Gil, E.; Escola, A.; Rosell, J.R.; Planas, S.; Val, L. Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Prot. 2007, 26, 1287–1297. [Google Scholar] [CrossRef]
- Walklate, P.J.; Cross, J.V.; Pergher, G. Support system for efficient dosage of orchard and vineyard spraying products. Comput. Electron. Agric. 2011, 75, 355–362. [Google Scholar] [CrossRef]
- Viret, O.; Dubuis, P.H.; Bloesch, B.; Fabre, A.L.; Dupuis, D. Dosage des fongicides adapté à la surface foliaire en viticulture: Efficacité de la lutte. Rev. Suisse Vitic. Arboric. Hortic. 2010, 42, 226–233. (In Italian) [Google Scholar]
- Pergher, G. Metodi per adeguare la dose di agrofarmaco alle caratteristiche della chioma nei trattamenti alle colture arboree. In Proceedings of the Problemi Sanitari Delle Colture Ortoflorovivaistiche ed Evoluzione Delle Strategie di Difesa, Turin, Italy, 28 February–2 March 2007; pp. 15–19. (In Italian)
- Pergher, G.; Petris, R. Pesticide Dose Adjustment in Vineyard Spraying and Potential for Dose Reduction. Agric. Eng. Int. CIGR J. 2008, X. Available online: https://cigrjournal.org/index.php/Ejounral/article/viewFile/1254/1111 (accessed on 10 October 2016). [Google Scholar]
- Siegfried, W.; Viret, O.; Huber, B.; Wohlhauser, R. Dosage of plant protection products adapted to leaf area index in viticulture. Crop Prot. 2007, 26, 73–82. [Google Scholar] [CrossRef]
- Campbell, G.S.; Norman, J.M. An Introduction to Environmental Biophysics, 2nd ed.; Springer: New York, NY, USA, 1998. [Google Scholar]
- Weiss, M.; Baret, F.; Smith, G.J.; Jonckheere, I.; Coppin, P. Review of methods for in situ leaf area index (LAI) determination Part II. Estimation of LAI, errors and sampling. Agric. For. Meteorol. 2004, 121, 37–53. [Google Scholar] [CrossRef]
- Johnson, L.F.; Pierce, L.L. Indirect measurement of Leaf Area Index in California North Coast vineyards. HortScience 2004, 39, 236–238. [Google Scholar]
- Lopez-Lozano, R.; Casterad, M.A. Comparison of different protocols for indirect measurement of leaf area index with ceptometers in vertically trained vineyards. Aust. J. Grape Wine Res. 2013, 19, 116–122. [Google Scholar] [CrossRef]
- Bronge, B.L. Vegetation indices for estimation of LAI, FPAR and primary production—Parameters influencing the relationships. In Satellite Remote Sensing for Estimating Leaf Area Index, FPAR and Primary Production. A Literature Review; No. SKB-R--04-24; Swedish Nuclear Fuel and Waste Management Co.: Stockholm, Sweden, 2004. [Google Scholar]
- Zarco-Tejada, P.J.; Berjón, A.; López-Lozano, R.; Miller, J.R.; Martín, P.; Cachorro, V.; González, M.R.; de Frutos, A. Assessing vineyard condition with hyperspectral indices: Leaf and canopy reflectance simulation in a row-structured discontinuous canopy. Remote Sens. Environ. 2005, 99, 271–287. [Google Scholar] [CrossRef]
- Fuentes, S.; Poblete-Echeverría, C.; Ortega-Farias, S.; Tyerman, S.; De Bei, R. Automated estimation of leaf area index from grapevine canopies using cover photography, video and computational analysis methods. Aust. J. Grape Wine Res. 2014, 20, 465–473. [Google Scholar] [CrossRef]
- Hall, A.; Lamb, D.W.; Holzapfel, B.; Louis, J. Optical remote sensing applications in viticulture—A review. Aust. J. Grape Wine Res. 2002, 8, 36–47. [Google Scholar] [CrossRef]
- Drissi, R.; Goutouly, J.P.; Forget, D.; Gaudillere, J.P. Nondestructive Measurement of Grapevine Leaf Area by Ground Normalized Difference Vegetation Index. Agron. J. 2009, 101, 226–231. [Google Scholar] [CrossRef]
- Johnson, L.F.; Roczen, D.E.; Youkhana, S.K.; Nemani, R.R.; Bosch, D.F. Mapping vineyard leaf area with multispectral satellite imagery. Comput. Electron. Agric. 2003, 38, 33–44. [Google Scholar] [CrossRef]
- Dobrowski, S.Z.; Ustin, S.L.; Wolpert, J.A. Remote estimation of vine canopy density in vertically shoot-positioned vineyards: Determining optimal vegetation indices. Aust. J. Grape Wine Res. 2002, 8, 117–125. [Google Scholar] [CrossRef]
- Lopez-Lozano, R.; Baret, F.; de Cortazar-Atauri, I.G.; Bertrand, N.; Casterad, M.A. Optimal geometric configuration and algorithms for LAI indirect estimates under row canopies: The case of vineyards. Agric. For. Meteorol. 2009, 149, 1307–1316. [Google Scholar] [CrossRef]
- Jonckheere, I.; Fleck, S.; Nackaerts, K.; Muys, B.; Coppin, P.; Weiss, M.; Baret, F. Review of methods for in situ leaf area index determination. Part I. Theories, sensors and hemi-spherical photography. Agric. For. Meteorol. 2004, 121, 19–35. [Google Scholar] [CrossRef]
- Englund, S.R.; O’Brien, J.J.; Clark, D.B. Evaluation of digital and film hemispherical photography for predicting understorey light in a Bornean tropical rain forest. Agric. For. Meteorol. 2000, 97, 129–139. [Google Scholar]
- Confalonieri, R.; Foi, M.; Casa, R.; Aquaro, S.; Tona, E.; Peterle, M.; Boldini, A.; De Carli, G.; Ferrari, A.; Finotto, G.; et al. Development of an app for estimating leaf area index using a smartphone. Trueness and precision determination and comparison with other indirect methods. Comput. Electron. Agric. 2013, 96, 67–74. [Google Scholar] [CrossRef]
- Warren-Wilson, J. Estimation of foliage denseness and foliage angle by inclined point quadrats. Aust. J. Bot. 1963, 11, 95–105. [Google Scholar] [CrossRef]
- Baret, F.; de Solan, B.; Lopez-Lozano, R.; Ma, K.; Weiss, M. GAI estimates of row crops from downward looking digital photos taken perpendicular to rows at 57.5 zenith angle: Theoretical considerations based on 3D architecture models and application to wheat crops. Agric. For. Meteorol. 2010, 150, 1393–1401. [Google Scholar] [CrossRef]
- Francone, C.; Pagani, V.; Foi, M.; Cappelli, G.; Confalonieri, R. Comparison of leaf area index estimates by ceptometerand PocketLAI smart app in canopies with different structures. Field Crop. Res. 2014, 155, 38–41. [Google Scholar] [CrossRef]
- Orlando, F.; Movedi, E.; Paleari, L.; Gilardelli, C.; Foi, M.; Dell’Oro, M.; Confalonieri, R. Estimating leaf area index in tree species using the PocketLAI smart app. Appl. Veg. Sci. 2015, 18, 716–723. [Google Scholar] [CrossRef]
- Campos-Taberner, M.; García-Haro, J.; Confalonieri, R.; Martínez, B.; Moreno, Á.; Sánchez-Ruiz, S.; Gilabert, M.A.; Camacho, F.; Boschetti, M.; Busetto, L. Multitemporal monitoring of plant area index in the Valencia rice district with PocketLAI. Remote Sens. 2016, 8, 202–217. [Google Scholar] [CrossRef]
- De Bei, R.; Fuentes, S.; Gilliham, M.; Tyerman, S.; Edwards, E.; Bianchini, N.; Smith, J.; Collins, C. VitiCanopy: A free computer App to estimate canopy vigor and porosity for grapevine. Sensors 2016, 16, 585. [Google Scholar] [CrossRef] [PubMed]
- Lorenz, D.H.; Eichhorn, K.W.; Bleiholder, H.; Klose, R.; Meier, U.; Weber, E. Growth Stages of the Grapevine: Phenological growth stages of the grapevine (Vitis vinifera L. ssp. vinifera)—Codes and descriptions according to the extended BBCH scale. Aust. J. Grape Wine Res. 1995, 1, 100–103. [Google Scholar] [CrossRef]
- Liu, C.; Kang, S.; Li, F.; Li, S.; Du, T. Canopy leaf area index for apple tree using hemispherical photography in arid region. Sci. Hortic. 2013, 164, 610–615. [Google Scholar] [CrossRef]
- Breda, N. Ground-based measurements of leaf area index: A review of methods, instruments and current controversies. J. Exp. Bot. 2003, 54, 2403–2417. [Google Scholar] [CrossRef] [PubMed]
- Jørgensen, S.E.; Kamp-Nielsen, L.; Christensen, T.; Windolf-Nielsen, J.; Westergaard, B. Validation of a prognosis based upon a eutrophication model. Ecol. Model. 1986, 32, 165–182. [Google Scholar] [CrossRef]
- Schaeffer, D.L. A model evaluation methodology applicable to environmental assessment models. Ecol. Model. 1980, 8, 275–295. [Google Scholar] [CrossRef]
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models part I. A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Loague, K.; Green, R.E. Statistical and graphical methods for evaluating solute transport models: Overview and application. J. Contam. Hydrol. 1991, 7, 51–73. [Google Scholar] [CrossRef]
- Jonckheere, I.; Nackaerts, K.; Muys, B.; Coppin, P. Assessment of automatic gap fraction estimation of forests from digital hemispherical photography. Agric. For. Meteorol. 2005, 132, 96–114. [Google Scholar] [CrossRef]
- Smart, R.E.; Dick, J.K.; Gravett, I.M.; Fisher, B.M. Canopy Management to Improve Grape Yield and Wine Quality Principles and Practices. S. Afr. J. Enol. Vitic. 1990, 11, 3–17. Available online: http://www.sawislibrary.co.za/dbtextimages/SmartR11.pdf (accessed on 10 September 2016). [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | BBCH-Stage | Row Genotype | Number of Sampled Vines |
|---|---|---|---|
| 5 May | 56 | cv. Barbera (rootstocks: AT84 × Kober 5bb) | 3 |
| cv. Barbera (rootstocks: AT84 × SO4) | 3 | ||
| cv. Barbera (rootstocks: AT84 × 420A) | 3 | ||
| 12 May | 57 | cv. Barbera (rootstocks: AT84 × Kober 5bb) | 3 |
| cv. Barbera (rootstocks: AT84 × SO4) | 3 | ||
| cv. Barbera (rootstocks: AT84 × 420A) | 3 | ||
| 22 May | 61 | cv. Barbera (rootstocks: AT84 × Kober 5bb) | 3 |
| cv. Barbera (rootstocks: AT84 × SO4) | 3 | ||
| cv. Barbera (rootstocks: AT84 × 420A) | 3 | ||
| 5 June | 74 | cv. Barbera (rootstocks: AT84 × Kober 5bb) | 3 |
| cv. Barbera (rootstocks: AT84 × SO4) | 3 | ||
| cv. Barbera (rootstocks: AT84 × 420A) | 3 | ||
| 23 June | 77 | cv. Barbera (rootstocks: AT84 × Kober 5bb) | 3 |
| cv. Barbera (rootstocks: AT84 × SO4) | 3 | ||
| cv. Barbera (rootstocks: AT84 × 420A) | 3 | ||
| 20 July | 81 | cv. Chardonnay (rootstocks: R8 × M3) | 2 |
| cv. Chardonnay (rootstocks: R8 × M2) | 2 | ||
| cv. Chardonnay (rootstocks: AT84 × SO4) | 2 | ||
| cv. Barbera (rootstocks: AT84 × Kober 5bb) | 2 | ||
| cv. Barbera (rootstocks: AT84 × SO4) | 2 |
| Agreement between LAI Measurement Methods | ||||||
|---|---|---|---|---|---|---|
| PocketLAI vs. Direct Measures | DHP vs. Direct Measures | PocketLAI vs. DHP | ||||
| Dataset-1 | Dataset-2 | Dataset-1 | Dataset-2 | Dataset-1 | Dataset-2 | |
| R2 | 0.77 * | 0.94 * | 0.94 * | 0.85 * | 0.68 * | 0.84 * |
| MAE | 0.15 | 0.09 | 0.66 | 0.60 | 0.57 | 0.57 |
| RRMSE | 43.00 | 17.27 | 99.46 | 100.79 | 50.39 | 50.39 |
| EF | 0.74 | 0.93 | −0.40 | −1.29 | −0.14 | −0.14 |
| CRM | 0.06 | −0.04 | −0.87 | −0.93 | 0.46 | 0.46 |
| Agreement between plant vigour descriptors | ||||||
| PocketLAI vs. TL | DHP vs. TL | Direct measures vs. TL | ||||
| R2 | 0.96 * | 0.85 * | 0.92 * | |||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orlando, F.; Movedi, E.; Coduto, D.; Parisi, S.; Brancadoro, L.; Pagani, V.; Guarneri, T.; Confalonieri, R. Estimating Leaf Area Index (LAI) in Vineyards Using the PocketLAI Smart-App. Sensors 2016, 16, 2004. https://doi.org/10.3390/s16122004
Orlando F, Movedi E, Coduto D, Parisi S, Brancadoro L, Pagani V, Guarneri T, Confalonieri R. Estimating Leaf Area Index (LAI) in Vineyards Using the PocketLAI Smart-App. Sensors. 2016; 16(12):2004. https://doi.org/10.3390/s16122004
Chicago/Turabian StyleOrlando, Francesca, Ermes Movedi, Davide Coduto, Simone Parisi, Lucio Brancadoro, Valentina Pagani, Tommaso Guarneri, and Roberto Confalonieri. 2016. "Estimating Leaf Area Index (LAI) in Vineyards Using the PocketLAI Smart-App" Sensors 16, no. 12: 2004. https://doi.org/10.3390/s16122004
APA StyleOrlando, F., Movedi, E., Coduto, D., Parisi, S., Brancadoro, L., Pagani, V., Guarneri, T., & Confalonieri, R. (2016). Estimating Leaf Area Index (LAI) in Vineyards Using the PocketLAI Smart-App. Sensors, 16(12), 2004. https://doi.org/10.3390/s16122004