1. Introduction
Micromechanical resonators have been widely used as the key sensing elements in diverse sensors such as micromechanical inertial sensors, resonant pressure sensors, etc. Microresonators, fabricated by bulk silicon process and bonding technology, have the advantages of small size, light weight, low power consumption, and suitability for integration with IC technologies. Compared with conventional macroscopic-sized resonators, micromechanical resonators are more liable to present nonlinear dynamic features [
1,
2]. Since the resonators are small in size, they are generally driven close to or even into nonlinear regimes in order to achieve higher vibration amplitudes and therefore sufficiently higher sensitivity and signal-to-noise ratios (SNRs). However, when the vibration amplitude is close to or even located in the nonlinear region, instability caused by nonlinear effects will emerge and the overall sensor performance will be decreased [
3,
4]. Therefore, studies on the nonlinear dynamics of microresonators have been a research hot spot in recent years [
5,
6,
7,
8]. Obtaining the nonlinear dynamics by experimental methods will not only benefit in operating circuit configuration for the manufactured microsensors, but also provide guidance for future resonator design optimization. Furthermore, experimentally obtained nonlinear dynamic parameters provide reliable support for realizing the parameter resonance of microresonators employing the nonlinear characteristics [
5,
6,
7,
8].
With respect to the nonlinear dynamics test for a second order mass-spring-damping system, there are mainly two kinds of experimental approaches, i.e., the sine wave frequency sweeping method and the free damped oscillation method. The former is the most commonly used. The nonlinear features are characterized by analyzing the amplitude-frequency response curves obtained from different excitation amplitudes [
9]. Due to the requirement for multiple frequency sweeping operations, the method is practically complicated and cumbersome. The analysis results also strongly rely on the physical model. In contrast, the free damped oscillation method is nonparametrically operated and independent of the physical model. The resonator under test is excited by sinusoidal pulses with a certain duration time and the nonlinear information is obtained from the free vibration signals [
10,
11]. Within the relevant studies on free damped oscillation methods, FREEVIB proposed by Feldman is the best known algorithm [
11,
12,
13]. Instantaneous parameters, including instantaneous frequency and instantaneous amplitude, are extracted from the free vibration signal by a Hilbert transform. Then the Backbone curve, damping curve, and other nonlinear characteristics of the system are figured out. The main advantages of FREEVIB lay in its extensive applicability and no need for prior knowledge. However, since the Hilbert transform is very sensitive to noise, many references are mainly focused on theoretical analyses and numerical simulations [
12,
13]. Peng et al. drew on the ideas of Feldman and obtained the nonlinear characteristics from free vibration signals with a Polynomial Chirplet Transform. The numerical simulation results give a preferable anti-noise performance [
14,
15]. Wang et al. accurately obtained the instantaneous frequency from time-varying free vibration signals by a wavelet ridge method, but the instantaneous amplitude calculation results were not given [
16]. To the best of our knowledge, the investigated objects of such Hilbert transform algorithms are mainly macro-sized mechanical structures that are generally operating at low frequencies and with small quality factors. There are fewer relevant reports about microresonators such as MEMS gyroscopes or MEMS accelerometers, etc., whose operating frequencies and quality factors are both relatively high.
In this paper a stepped frequency sweeping method is investigated, focusing on measuring the nonlinearity of microresonators with high frequency and low damping ratio. In the vicinity of the resonant frequency, a frequency stepping sinusoidal pulse sequence is used as the excitation signal. A set of response signals, which contain different levels of nonlinear dynamic characteristics, are therefore obtained experimentally. The amplitude-frequency curves are obtained from the forced vibration signals. From the free vibration signals, the instantaneous frequency (IF) and instantaneous amplitude (IA) are calculated by a Hilbert transform. A singular spectrum analysis (SSA) algorithm is employed to remove the noisy fluctuations from the calculated IFs and IAs. Concentrated and legible Backbone curves and FRF curves can therefore be obtained. Taking the vibrating ring microgyroscope as an example, the nonlinear dynamics of the micromechanical resonator are experimentally analyzed. Satisfactory consistency between the results obtained by the proposed method and those obtained by the traditional frequency sweeping method is obtained.
2. Nonlinear SDOF System Response under Stepped Frequency Sweeping Excitation
Under a sinusoidal excitation with finite duration time, the dynamic equation of a single degree-of-freedom (SDOF) second-order vibration system can be expressed as:
where
m,
,
denote the mass, damping coefficient and stiffness coefficient, respectively.
F(
t) is the excitation signal.
B,
are the amplitude and frequency of the sinusoidal excitation signal, respectively.
t1 is the duration time of the sinusoidal signal. For
t > t1, the excitation is stopped and the system comes into the free damped oscillation state.
A high frequency and low damping Duffing system is taken as an example, where
m is 10
−7 kg, and
is 1.257 × 10
−6 N/(m/s) independent of the vibration amplitude.
is vibration amplitude-dependent and equals to 1.579 × 10
3 × (1 − 0.002
x2) N/m to give a “softened-spring” nonlinearity.
B,
,
t1 are set to be 0.1 N, 20 kHz and 1.5 s respectively. The sampling frequency
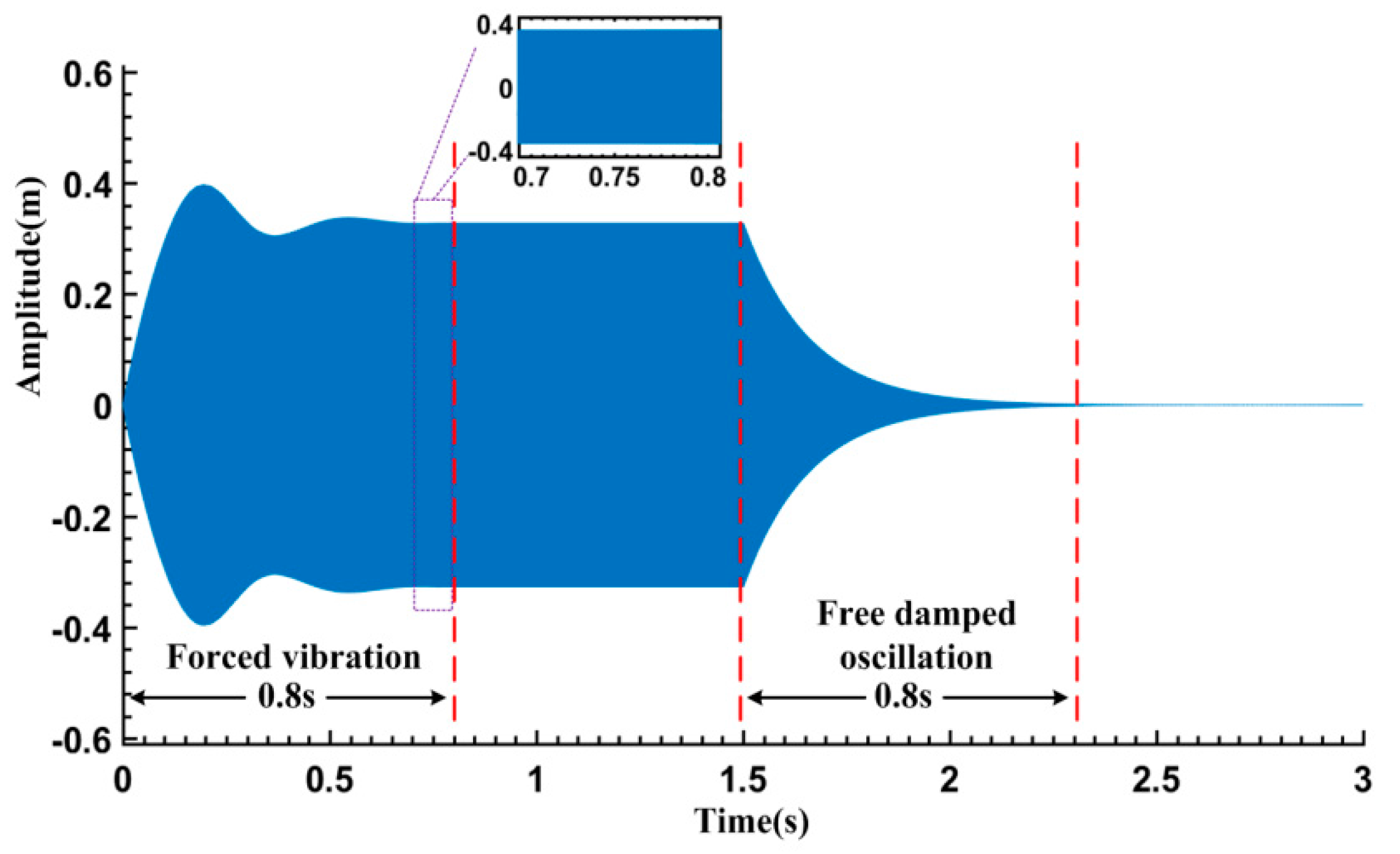
and the simulation time are set to be 1 MHz and 3 s, respectively. With the aid of the ode45 solver in Matlab, the time series of the system response is numerically calculated as shown in
Figure 1. Evidently, in the forced vibration stage, the signal amplitude gradually turns into a relatively steady state after a transition of regular increase and fluctuation. As the amplitude fluctuation rate during 0.7–0.8 s is less than 0.5%, it is appropriate to assume that the vibration enters into the steady-state after that. Additionally, after the excitation is ceased for about 0.8 s, the free damped oscillation amplitude is reduced from 0.33 m to 2.16 × 10
−3 m. Therefore, the duration time of both the excitation and the sampled free damped oscillation are set to be 0.8 s in the following analysis, unless otherwise indicated.
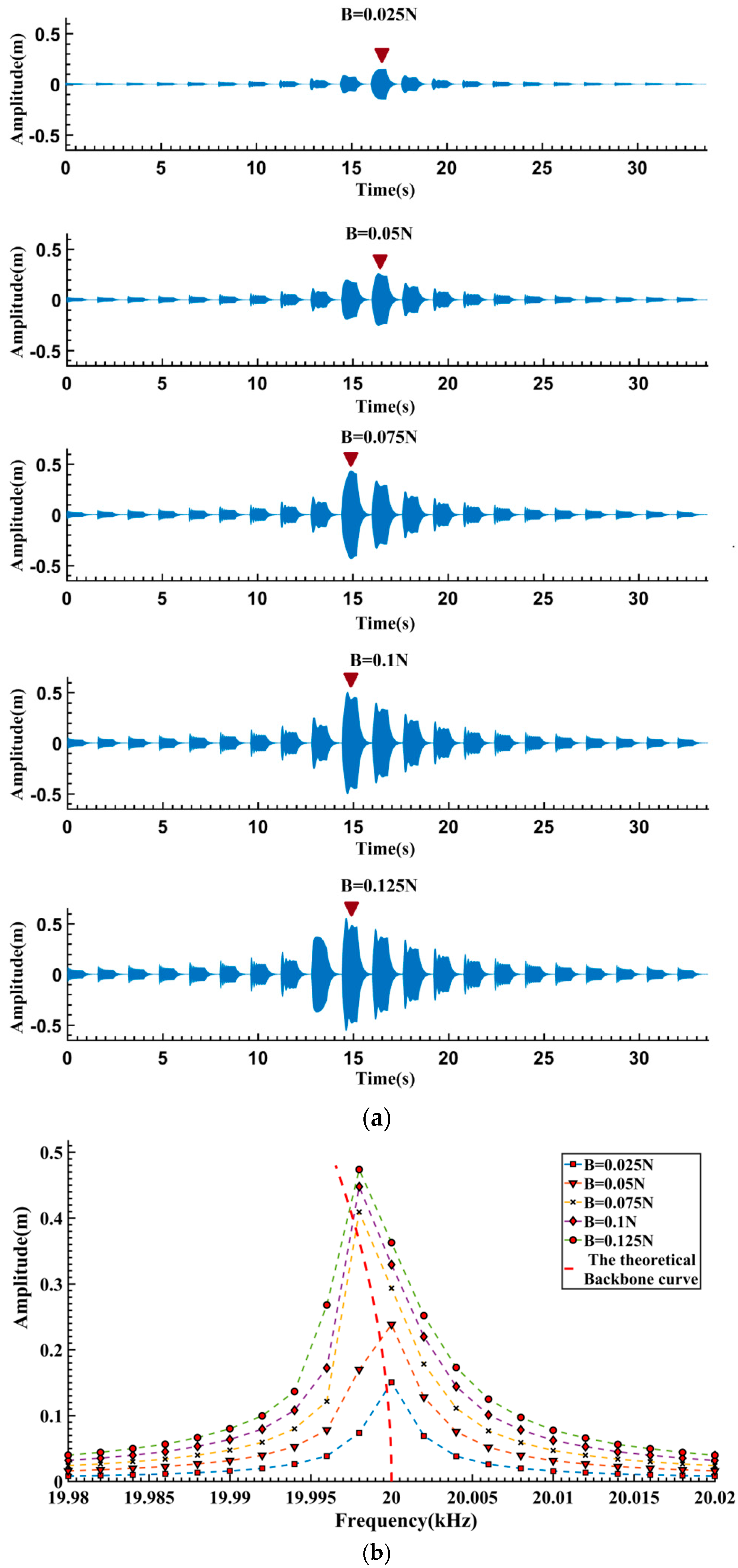
The MEMS resonator of an inertial sensor typically works in a low pressure encapsulation setup. Its resonant frequency is generally on the order of tens of kHz and the quality factor is relatively large (Q > 10,000). Therefore, if the excitation frequency is distant from its resonant frequency or the excitation amplitude is not high enough, it is difficult to obtain sufficient vibration amplitude. In order to obtain response signals containing different levels of nonlinear dynamical characteristics, a set of stair-stepped frequency sinusoidal pulse sequences is used as the excitation signal. The excitation amplitude
B is set to be 0.025–0.125 N, and the excitation frequency
varies with a 2 Hz step size in the range of 19.980–20.020 kHz. The simulated response signals are illustrated in
Figure 2a. It can be seen that even under the same excitation amplitude, there are noticeable differences between the steady-state vibration amplitudes. The highest amplitude appears at the position where the excitation frequency is near the resonant frequency (marked as
![Sensors 16 01700 i001]()
in
Figure 2a), while relatively lower amplitudes are observed in other positions. When the system is excited at lower amplitude as shown in
Figure 2a (
B = 0.025 N, 0.05 N), the response amplitude shows a bilaterally symmetrical shape, indicating that system is operating in an approximately linear region. On the other hand, the resonant frequencies (marked with
![Sensors 16 01700 i001]()
in
Figure 2a) shift leftward and bilateral asymmetrical shapes appeared under larger excitation amplitudes (
B ≥ 0.075 N). It can be therefore concluded that softening nonlinearity has appeared in the system.
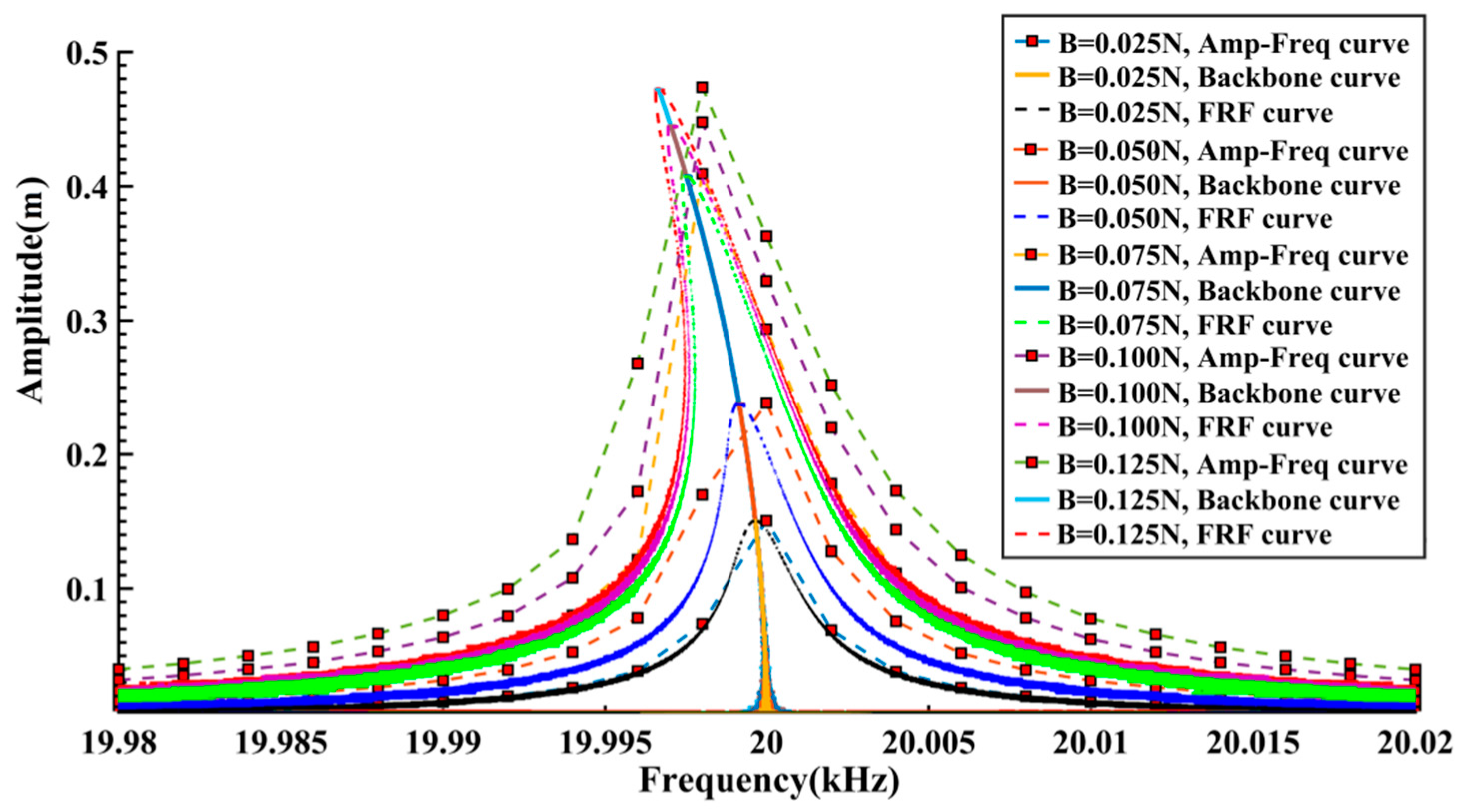
From
Figure 2a, the average amplitude during 0.7–0.8 s in the forced vibration stages is calculated as the steady-state response amplitude. The obtained relationship between the excitation frequency and steady-state response amplitude is shown in
Figure 2b. As a comparison, the theoretical Backbone curve of the system is plotted in the figure as well. Obviously, the obtained amplitude-frequency curves fit the theoretical Backbone curve well.
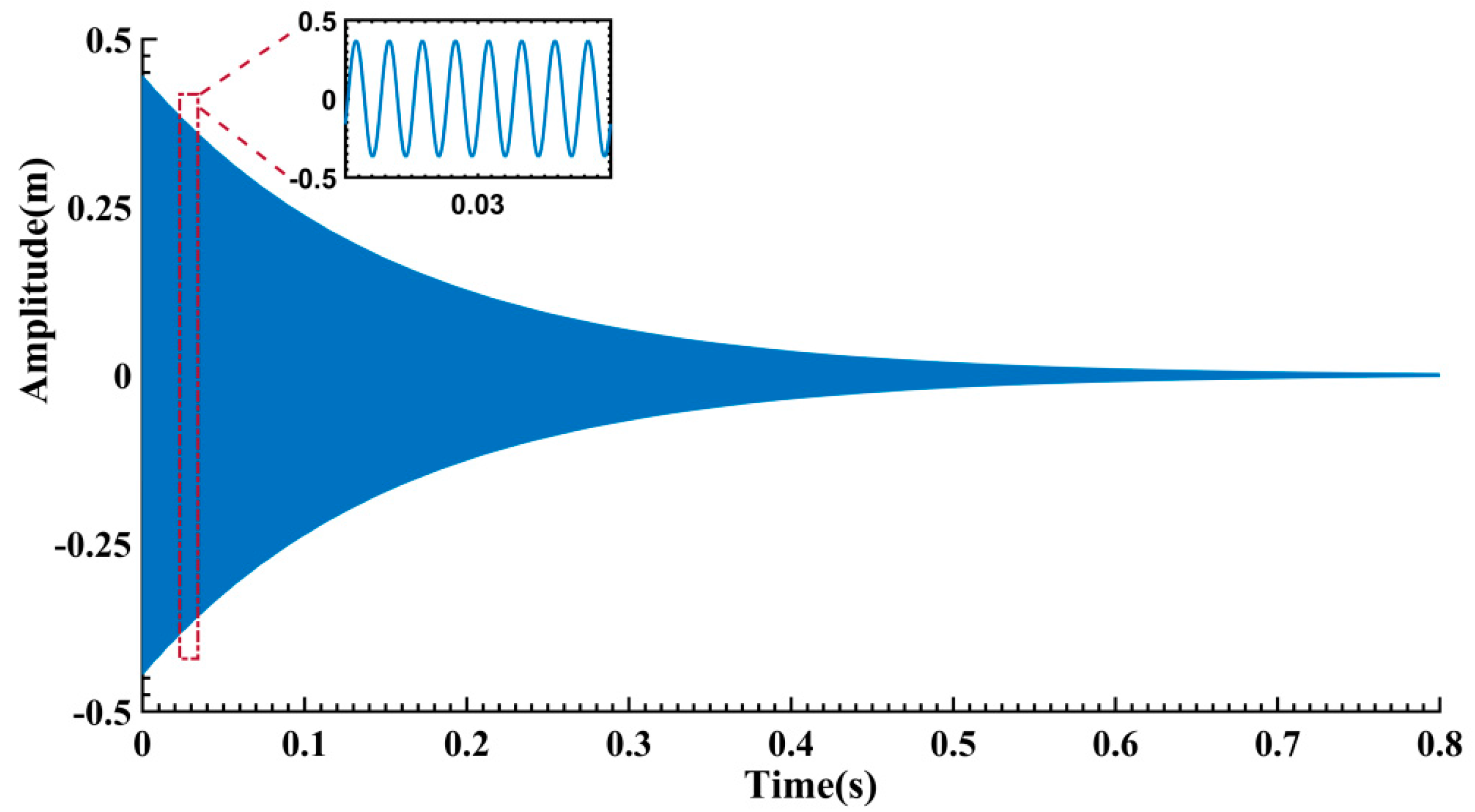
The free vibration signal
x(
t) is truncated from the largest response segment (marked by
![Sensors 16 01700 i001]()
in
Figure 2a, B = 0.075 N) as shown in
Figure 3. To obtain the nonlinear characteristics from
x(
t), the procedure of FREEVIB algorithm [
11,
12,
13] is summarized as follows:
- Step 1:
We apply the Hilbert transform to
x(
t), and
is obtained by the formula
.
can be considered as a filter that shifts each frequency component of
x(
t) by −π/2 in phases. The analytic signal is constructed in the form of
. Then, the instantaneous amplitude
A(
t) and instantaneous angular frequency
ω(
t) are computed by Equation (2):
- Step 2:
Calculate the instantaneous frequency
f0(
t) and normalized damping coefficient
h0(
t) from the instantaneous amplitude
A(
t),
ω(
t) and their derivatives.
- Step 3:
Smoothing process for f0(t), A(t) and h0(t) is implemented by low-pass filters and the results are denoted as f0(t)LPF, A(t)LPF and h0(t)LPF, respectively. Taking f0(t)LPF as horizontal axis and A(t)LPF as vertical axis, the Backbone curve is obtained. The Frequency Response Function (FRF) is estimated at the same time.
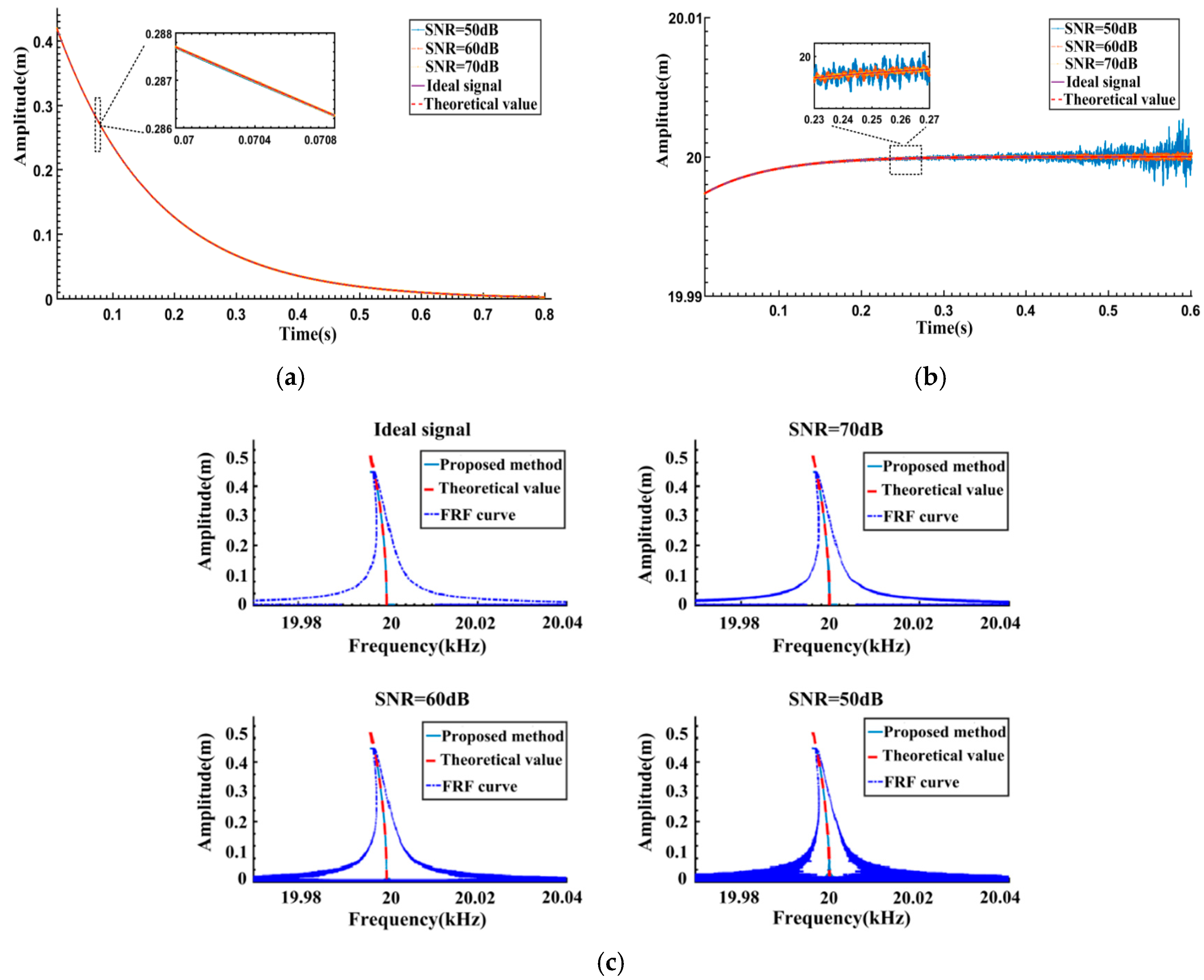
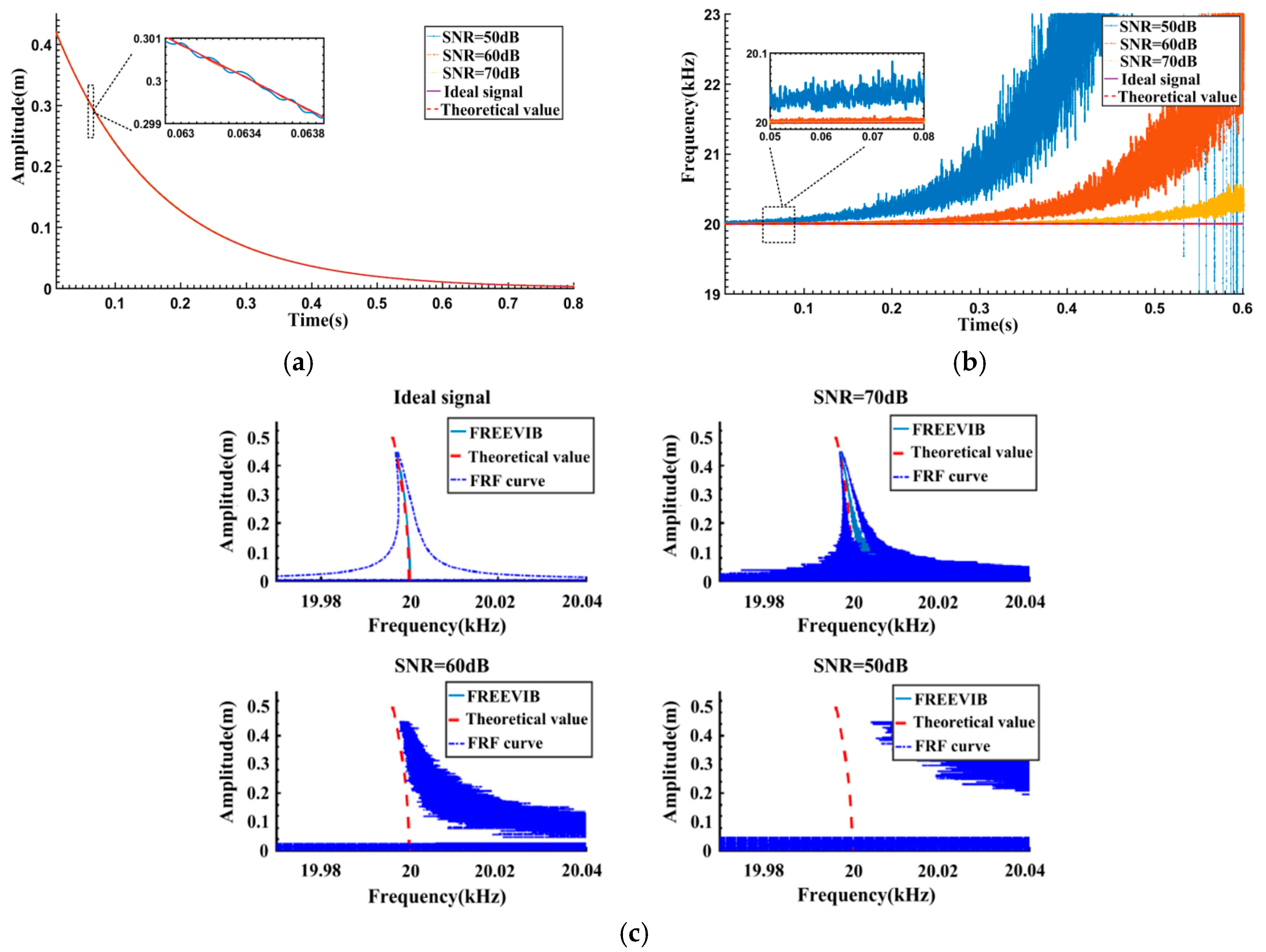
In order to simulate practical measurements, white noise is added into the free vibration signal to obtain noisy signals with different SNRs. The results calculated by FREEVIB are given in
Figure 4. It can be seen from
Figure 4a,b that, along with the decrease of SNR, the variation of the IAs is almost negligible. However, the IFs fluctuate severely and gradually deviate from the theoretical value. Correspondingly, as can be seen from
Figure 4c, FREEVIB could accurately extract the Backbone curve from the ideal signal, and the calculated FRF curve is both regular and legible. When the SNR is 70 dB, the upper part of the Backbone curve agrees well with the theoretical value. However, there is a certain offset at the bottom of the Backbone curve and a remarkable fluctuation of the FRF curve. As SNR is reduced to 50 dB, an overall and significant deviation is observed in the results. The FREEVIB algorithm fails to describe the actual dynamic behavior of the system.
Based on the analysis of
Figure 4, it could be concluded that the severe fluctuations of
f0(
t) account for the deviation of Backbone and FRF curves. The low-pass filter, employed in FREEVIB algorithm and based on frequency filtering principle, should be the main cause of the remarkable fluctuation in the results.
In order to further suppress the fluctuations of IFs and extract the frequency change trend effectively, the singular spectrum analysis (SSA) [
17,
18] algorithm is adopted here. Firstly, the trajectory matrix (Hankle matrix) is constructed from the time series of the IF,
IF(
n) = {
p1,
p2,…,
pN}:
where
L is the window length and
K = N – L + 1. Then the trajectory matrix is reconstructed by the first
q principal components after singular value decomposition (SVD):
. Finally the smoothing IF is obtained by performing diagonal averaging on
and the reconstruction process. Combining with SSA, the procedure of FREEVIB algorithm is modified as follows:
- Step 1:
Calculate the instantaneous amplitude
A(
t) and the instantaneous phase
θ(
t) from the free vibration signal
x(
t) by the Hilbert transform:
- Step 2:
Figure out the instantaneous frequency f(t) after the differential operation on θ(t), and the expression is f(t) = 0.5π−1dθ(t)/dt. The estimation of IA and IF, indicated by A(t)SSA and f(t)SSA respectively, are obtained by processing A(t) and f(t) with SSA algorithm.
- Step 3:
Compute the normalized damping coefficient
h(
t) by
A(
t)
SSA,
f(
t)
SSA and their derivatives [
19].
festd(
t) is figured out by the above mentioned parameters, and the FRF curve is further obtained. The corresponding equations are as follows:
The same noisy free vibration signals as in
Figure 4 are processed and the results are given in
Figure 5. The window length is set to be 800 sample points in the SSA algorithm. For the ideal signal, the Backbone curve and FRF curve are both extracted accurately by the proposed method. Significant improvements are obtained for the noisy signals case. Unlike the FREEVIB algorithm, when the SNR becomes relatively low, there are no longer noticeable fluctuations in IFs. Consequently, the calculated Backbone curves remain legible and accordant with the theoretical values. As the SNR decreases, there are some fluctuations in the computed FRFs, but it is still possible to effectively represent the system dynamics.
Further calculations are carried out with the other free vibration signals marked
![Sensors 16 01700 i001]()
in
Figure 2a. After truncation and noise addition, five segments of free vibration signals with 60 dB SNR are processed by the proposed algorithm and the results are given in
Figure 6. It can be seen that, in the case of lower excitation amplitude (B = 0.025 N, 0.05 N), almost no visible nonlinearity appears both in the Backbone curves and FRF curves, indicating that the system is operating in the approximately linear region. With the increase of excitation amplitude (B = 0.075 N–0.125 N), the nonlinear features in the Backbone curves and FRF curves become significant. Moreover, the variation tendencies of both the Backbone curves and FRF curves indicate the “softened-spring” characteristics of the system.
In order to perform a comparison, the Backbone curves and FRF curves under different excitation conditions are also summarized in
Figure 6. The amplitude-frequency curves in
Figure 2 are given as well. It can be seen that the calculated Backbone curves and FRF curves show good consistency. The amplitude-frequency curves, on the other hand, differ slightly from the FRF curves. This difference may be caused by the relatively larger frequency intervals as well as the fact only approximate steady-state data are used for the calculations. In any case, the shapes of the amplitude-frequency curves are still in good agreement with the FRF curves.
3. Experiments and Discussion
A MEMS vibrating ring gyroscope developed by our laboratory [
20] was experimentally tested. Its resonator structure and working principle are similar to those reported in [
21,
22,
23,
24,
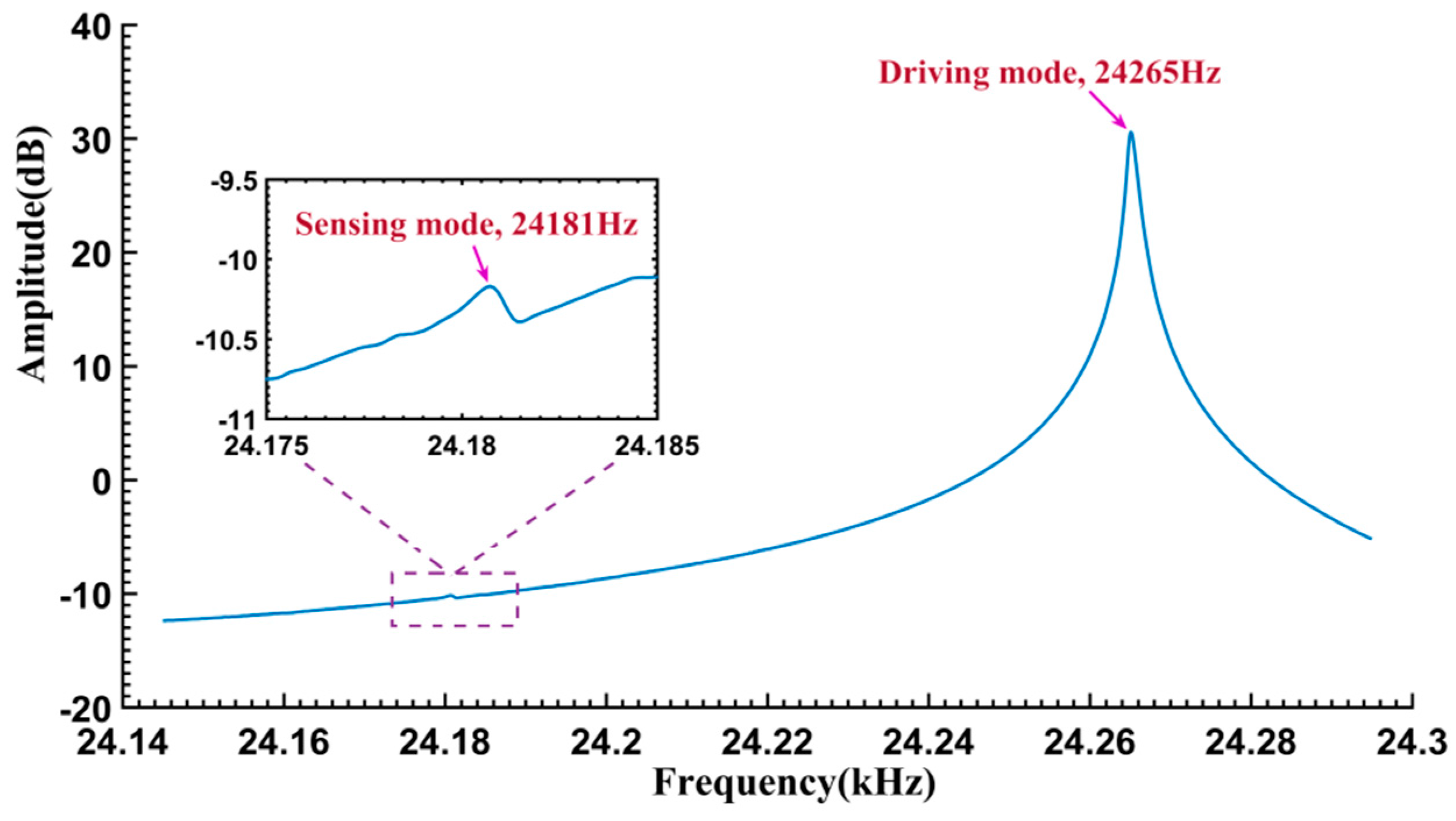
25]. The resonator is a suspended ring that works in its fundamental flexural mode. In operation, the ring is electrostatically driven and its vibration is capacitively picked up by the sensing electrodes (45° from the driving electrodes). The resonator is encapsulated in a low-pressure metallic package, and the Q factor is approximately 20,000. Due to the imperfections in the bulk silicon manufacturing process, there is an obvious frequency split of about 100 Hz in the practically fabricated gyroscopes. For the one under test, the amplitude-frequency response curve of the driving mode is presented in
Figure 7. Its natural frequency of the sensing mode is 24,181 Hz, but that of the driving mode is 24,265 Hz. In our case, the resonator is tested near the resonant frequency of the driving axis, so the influence of the sensing mode is quite weak and negligible, and the free vibration can be considered as a mono-frequency oscillation of a SDOF system.
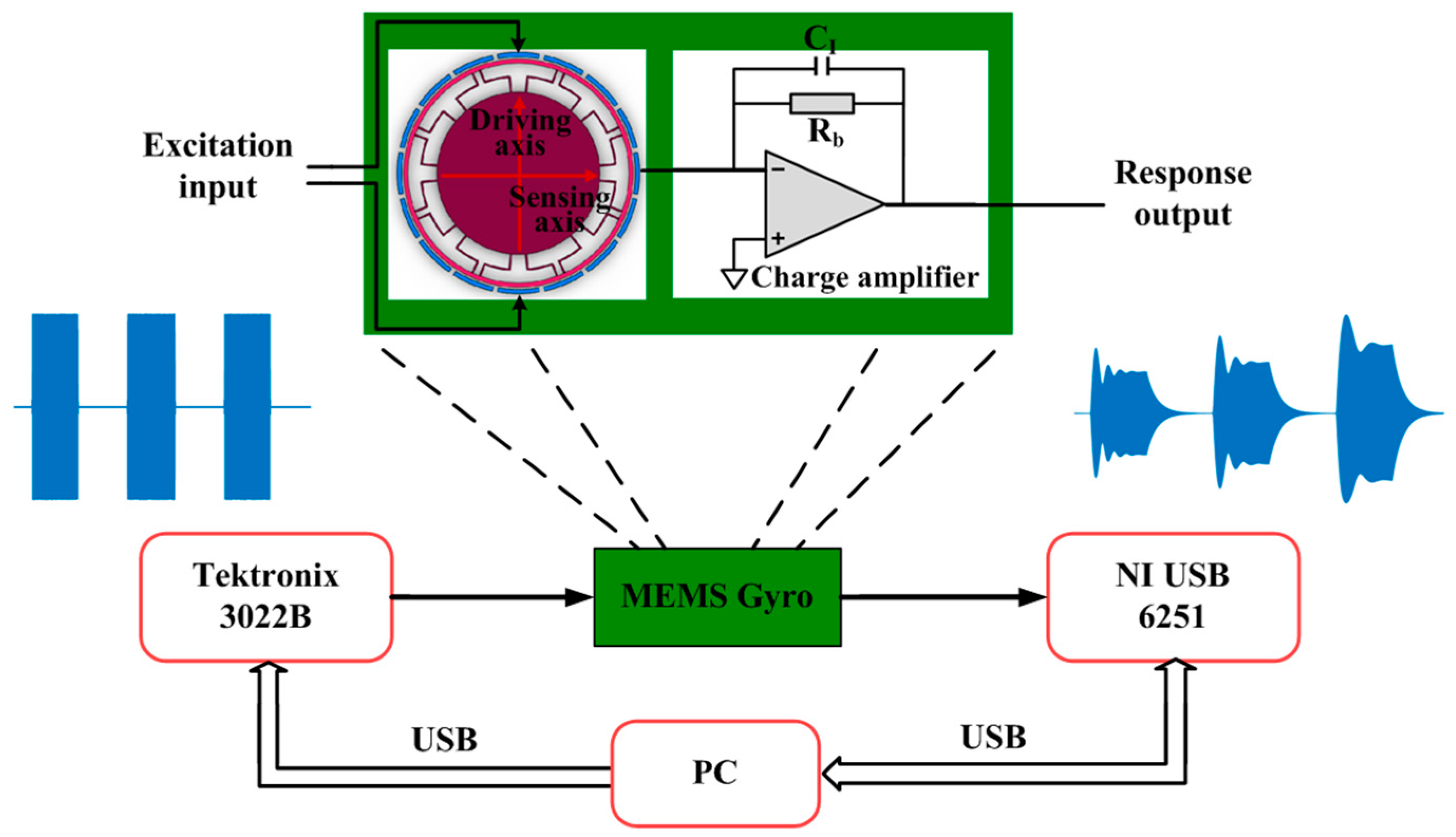
The schematic diagram of the testing system is shown in
Figure 8. The output terminal of an AFG 3022B function generator (Tektronix, Beaverton, OR, USA) is connected to the driving electrodes. The vibration along the driving axis is driven by the generated excitation signals. The vibration along the sensing axis is picked up by the sensing electrodes and the charge amplifier to give the response output signal. Therefore, the vibration response amplitude is given in voltages instead of meters. A USB 6251 DAQ device (NI, Austin, TX, USA) is used to sample both the excitation and response signals synchronously. The sampled signals are transmitted to a computer through an USB interface for subsequent signal processing and analysis.
During experiments, a stair-stepped frequency sinusoidal pulse sequence is generated by the AFG 3022B and used as the excitation signal. The excitation frequency varies in a 0.5 Hz forward step within the range of 24.257–24.269 Hz. The amplitudes of the excitation signals are varied from 50 mV to 200 mV. Similar to the above mentioned simulations, the time durations of the forced and free damped oscillation are set to be 1.6 and 1.8 s, respectively. The sampling frequency is set to be 250 kHz (approximately 10 times the signal frequency).
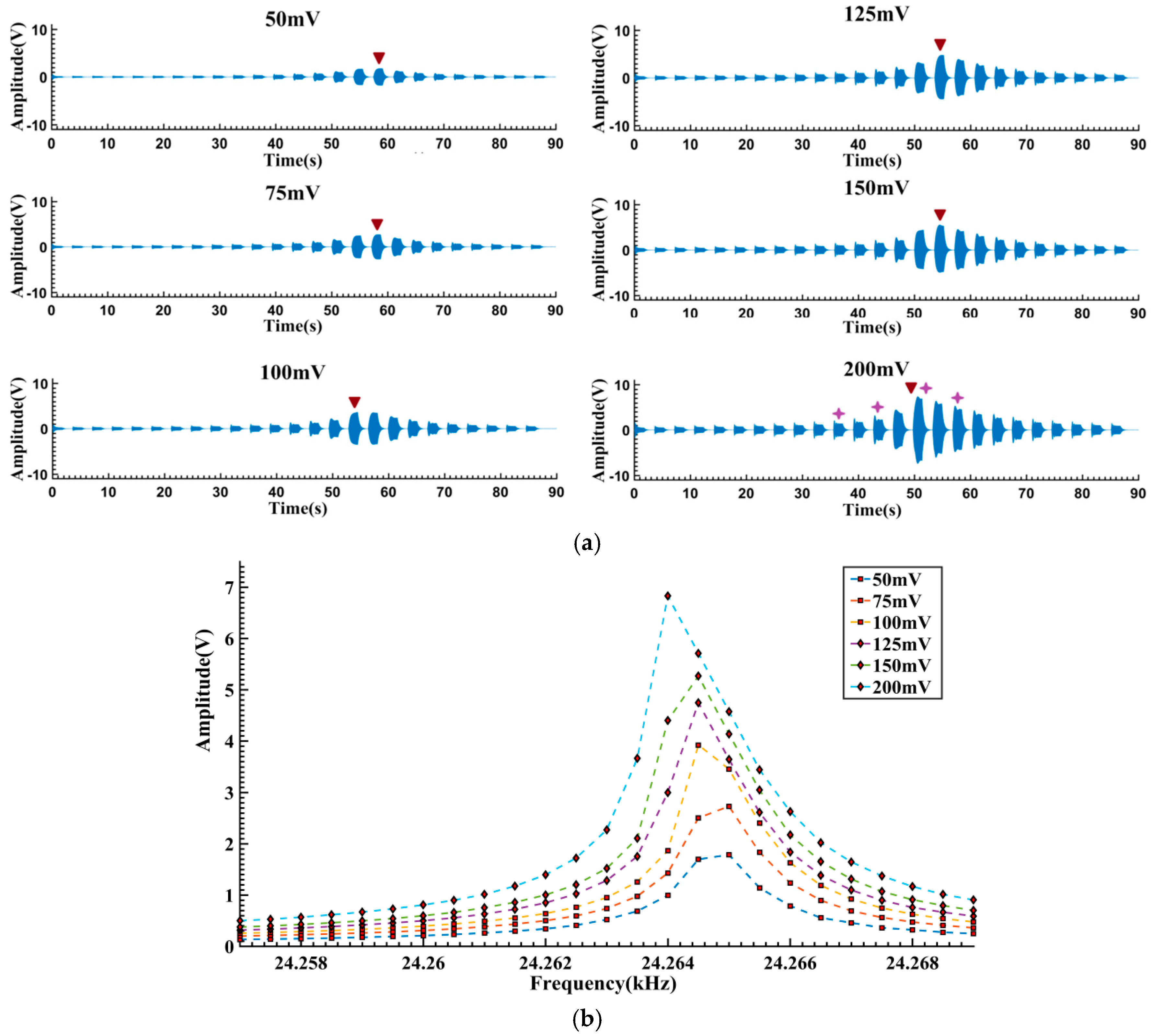
The measured response signals and the calculated amplitude-frequency curves are given in
Figure 9. Like the simulation results, the largest response amplitudes appear at positions where the excitation frequency is near the resonant frequencies (marked by
![Sensors 16 01700 i001]()
in
Figure 9a), and relatively smaller amplitudes are observed in other positions. When the excitation voltage exceeds 100 mV, the resonant frequencies shift leftwards and bilateral asymmetrical shapes appear, revealing the “softened-spring” characteristics of the tested gyroscope.
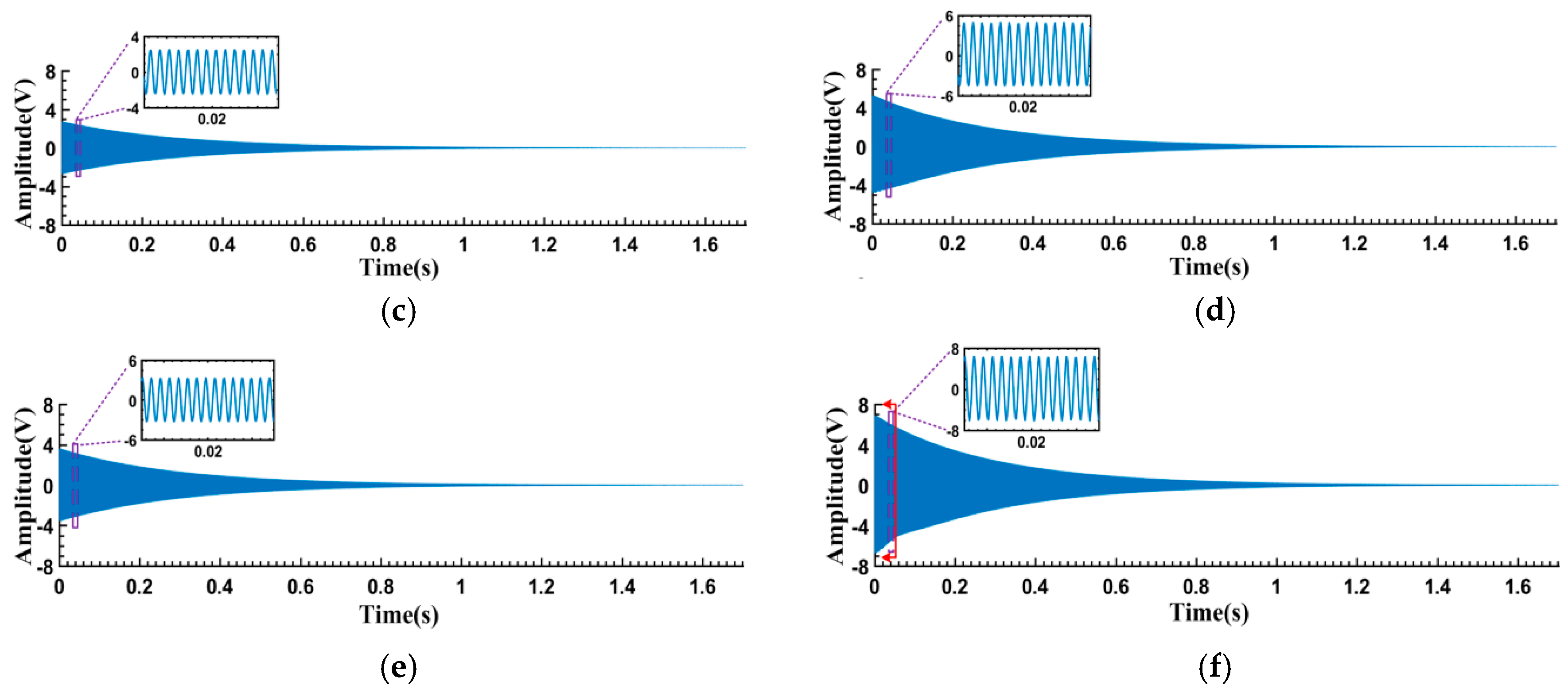
The free vibration signals of the largest response segments (marked as
![Sensors 16 01700 i001]()
in
Figure 9a) are truncated as shown in
Figure 10. It can be seen that when the vibration amplitudes are relatively small (
Figure 10a–e), the signal waveforms are vertically symmetrical and exponential decayed. However, when the vibration amplitudes exceed a certain level (about 6 V, indicated by the left arrow in
Figure 10f), the asymmetry gradually becomes visible. This might be caused by the non-ideal structure of the micromachined resonator. Asymmetry of the fabricated structure leads to different dynamics characteristics when the resonator vibrates positively and negatively from the balance position. Therefore, the asymmetric data on the left side of the indicating arrow in
Figure 10f are excluded to avoid the latent impact of waveform asymmetry.
The free vibration signals in
Figure 10 are processed by the proposed method. The results are shown in
Figure 11. As an example,
Figure 11 gives the detailed results of
Figure 10c. Both the calculated IA and IF curves are satisfactorily smooth. Correspondingly, the calculated Backbone curves and FRF curves are concentrated and legible, and can be used for characterizing the dynamic features. Six sets of the extracted Backbone and FRF curves are given in
Figure 12. When the maximum response amplitudes are below 3 V, the Backbone curves are approximate plumb lines and the FRF curves are bilaterally symmetrical, indicating that the resonator is vibrating linearly. As the maximum amplitudes increase to 4–6 V, the Backbone curves gradually bend to the left. In addition, “softened-spring” features are also exhibited in the FRF curves.
In order to further verify the results, the response signals under 200 mV excitation in
Figure 9a are analyzed. Four typical segments of the free vibration signals (segments 11, 13, 15, 17, marked as
![Sensors 16 01700 i002]()
in
Figure 9a) are truncated and processed. The obtained Backbone curves and FRF curves are given in
Figure 12. Approximately linear performances can be seen in the curves of segments 11, 13, while those of segments 15, 17 reveal the softened nonlinearity. In practical terms, if the excitation amplitude is properly selected, the linearity and non-linearity of the system dynamics can be obtained in a single measurement cycle.
It is obvious that the processed results in
Figure 12 agree with each other. In summary, when the maximum response amplitudes are less than 3 V, the Backbone curves appear as plumb lines, indicating that the resonator is working in the linear region. On the other hand, when the maximum response amplitudes exceed 3 V, the calculated curves start to bend leftward, representing the “softened-spring” nonlinearity of the tested gyroscope. When the maximum amplitudes reach about 6 V, it can be seen from the FRF curve, there will be multivalued mapping relationships between the excitation frequencies and the response amplitudes in the left vicinity of the resonant frequency. If the gyroscope is working in that region, it is liable to induce the occurrence of frequency instability. The gyroscope stability will therefore be greatly decreased in such a case. Taking the equilibrium between SNR improvement and nonlinearity effects into account, 3–6 V is considered to be an ideal region for operating the circuit setup. This conclusion is confirmed by the practical circuit adjustment results performed in our laboratory. Optimized performance, especially regarding the stability, is obtained when the output amplitude of the gyroscope is set to be 4.5–5 V.
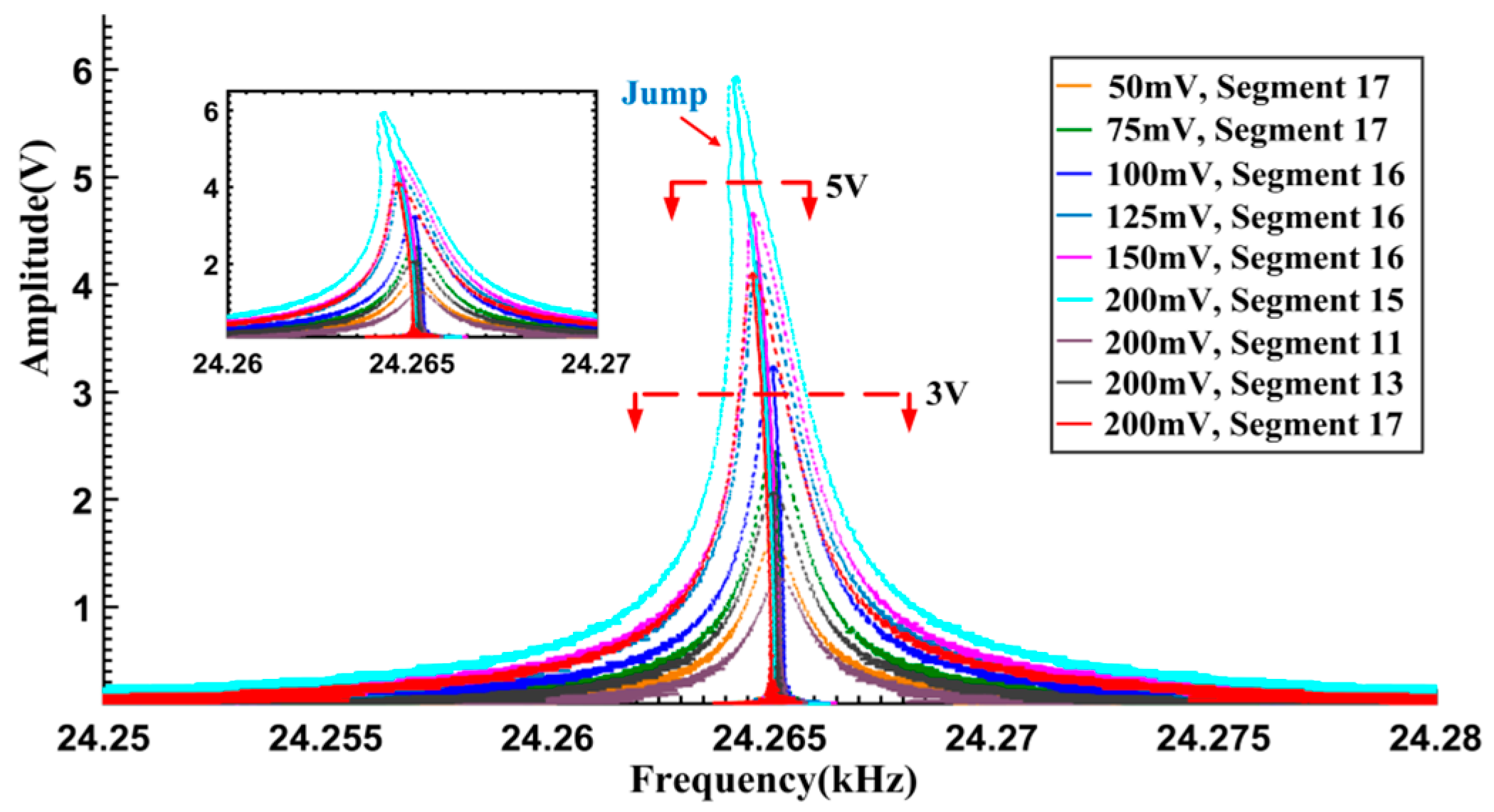
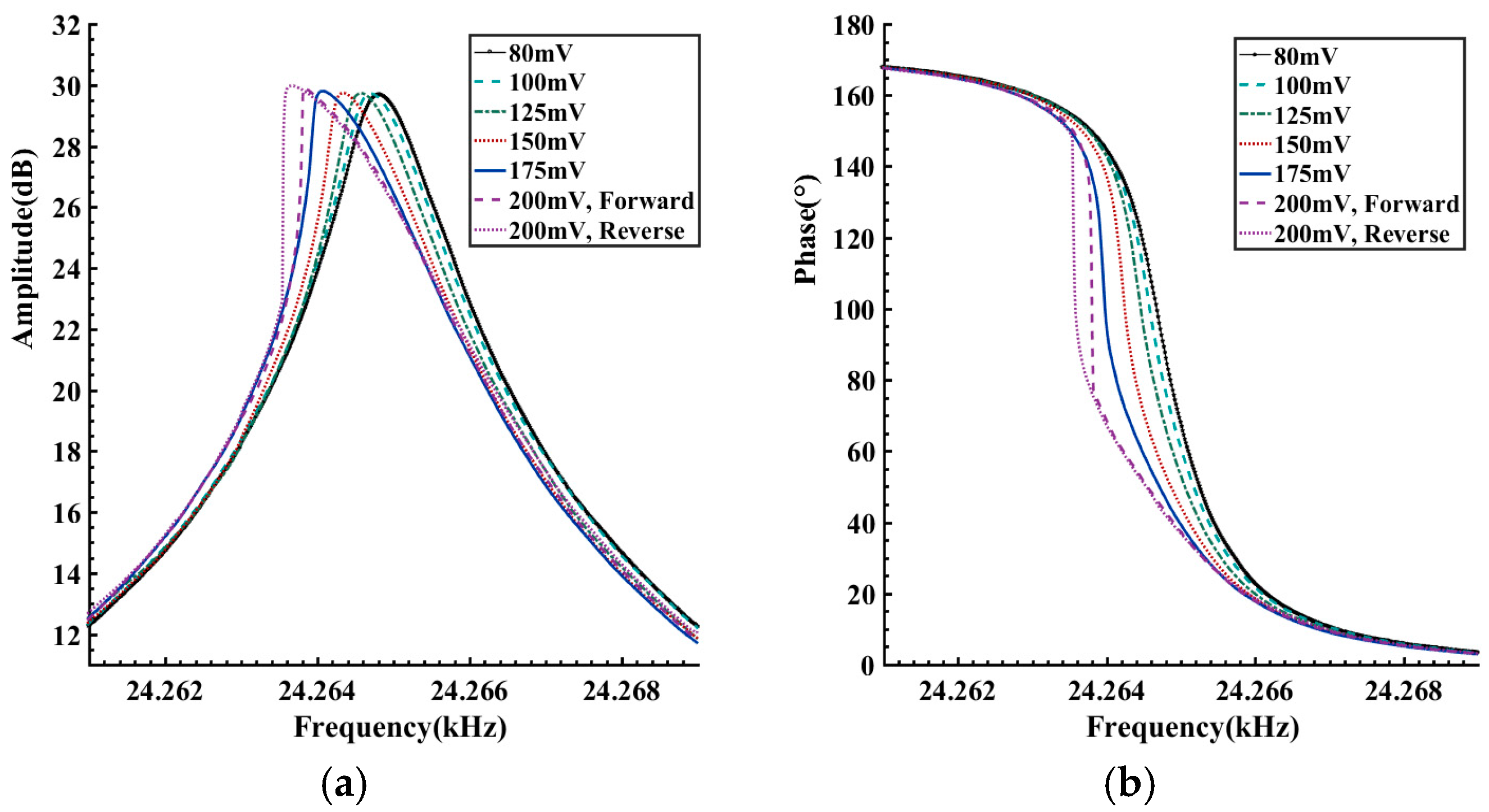
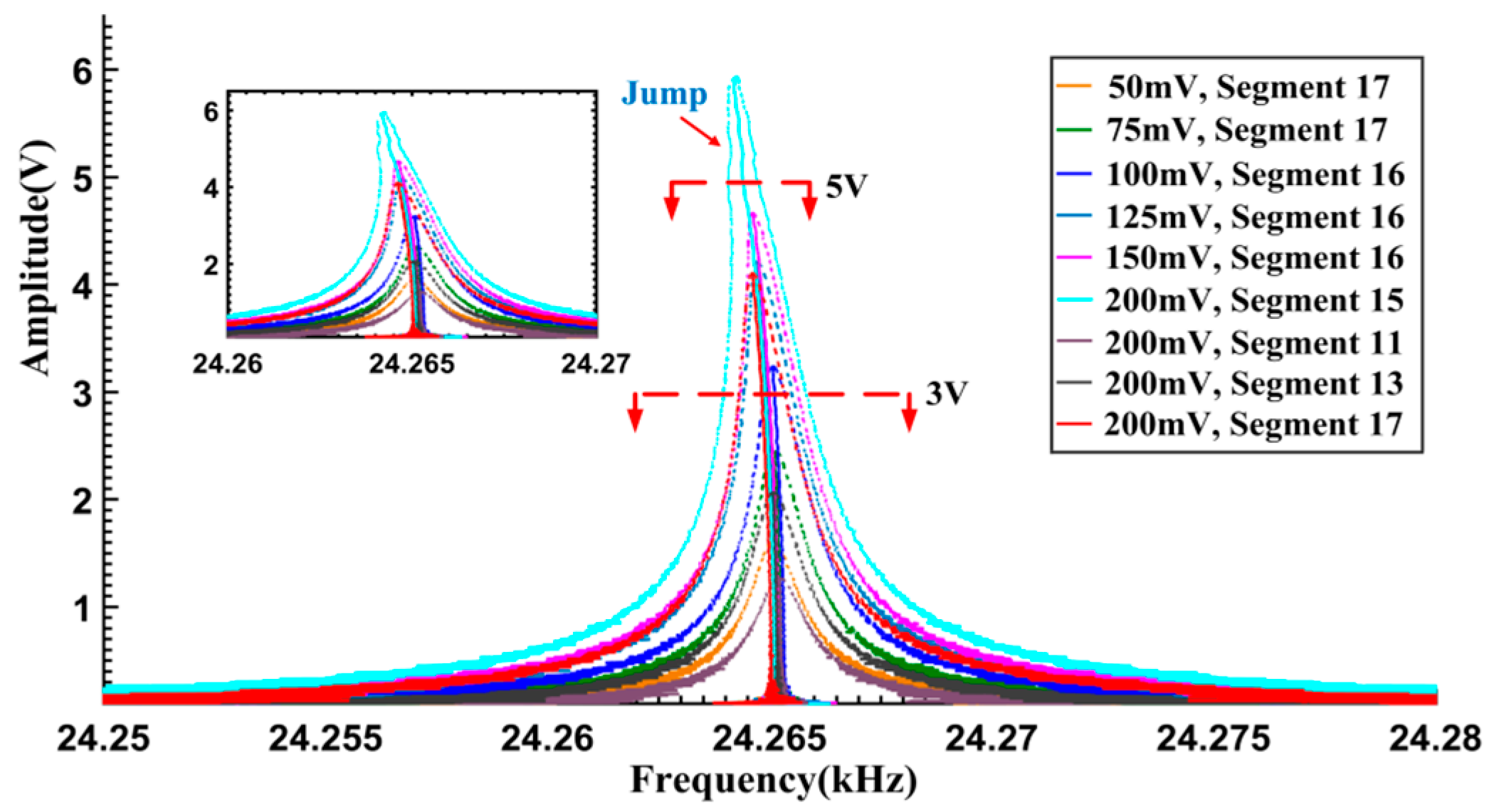
In order to verify the abovementioned results, a frequency sweeping method is employed to acquire the dynamic characteristics of the tested gyroscope. A HP35670A dynamic signal analyzer (Agilent, Santa Clara, CA, USA) is used in the experiments. The excitation voltages are assigned to six values in the 80–200 mV range. Within the range of 24,257–24,269 Hz, a forward and reverse frequency sweeping operation is conducted. The frequency step and the holding time are set to be 0.01 Hz and 1.5 s. The measured frequency response curves are given in
Figure 13.
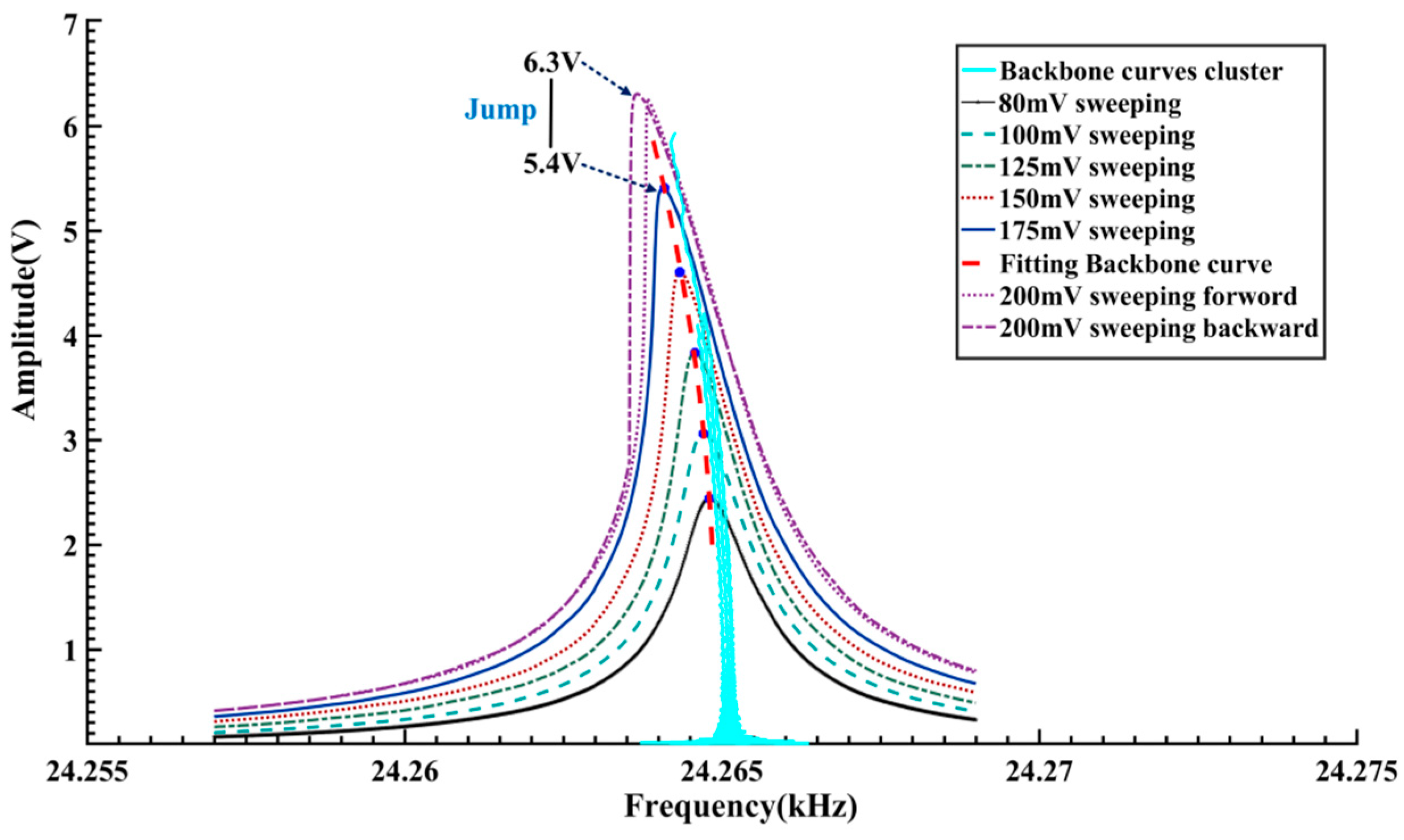
When the amplitude of the excitation voltage is within 80–175 mV, there is little difference between the forward and reverse sweeping curves. However, as the excitation amplitude reaches up to 200 mV, because of the frequency-jumping phenomenon, a significant difference is observed between the forward and reverse sweeping curves. The voltage-frequency curves, as shown in
Figure 14, are obtained by conversion of the amplitude-frequency responses in
Figure 13a. As the vibration amplitude increases, there is an apparent tendency of leftwards bending in the voltage-frequency curves, reflecting the softening nonlinearity of the gyroscope. When the vibration voltage is about 5.4–6.3 V, the frequency jumping phenomenon occurs. These results are quite consistent with the analyses of
Figure 12. As a comparison, the Backbone curves cluster in
Figure 12 is also plotted in
Figure 14. It can be seen that on the whole the Backbone curves obtained by the proposed method agree with those obtained by the frequency sweeping experiments. Compared with the frequency sweeping results, overall the obtained Backbone curves are biased towards the right by about 0.2 Hz.
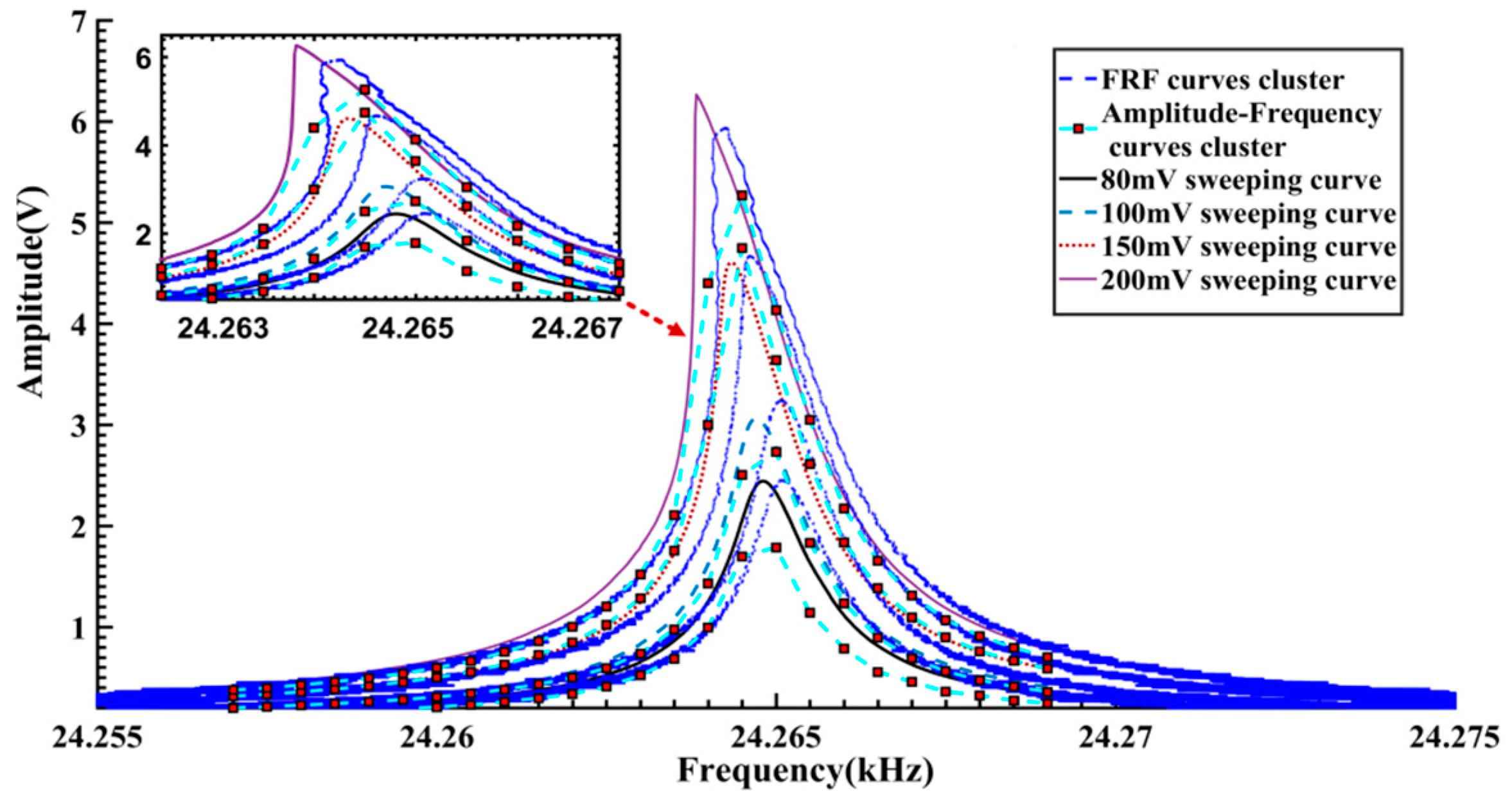
Figure 15 gives another comparison of the FRF curves cluster, amplitude-frequency curves cluster in
Figure 9b and the frequency sweeping results. It is quite clear that there is a good consistency in the trend and shape of the resulting curves. Like the Backbone curves in
Figure 14, compared with the other two kinds of processed curves, the calculated FRF curves show a slight rightwards deviation. Considering the distinction of the measurement conditions, such a difference should be acceptable. Specifically speaking, during the frequency sweeping operation, the gyroscope under test works in a steady excitation and response way.
Besides the mechanical properties of the resonator, several other electrical factors within the driven circuit will be reflected in the measurement results. On the other hand, only free vibration signals are considered in the proposed method and therefore any influences of such electrical factors will not appear in the results. In this sense, the proposed method is more reliable to characterize the dynamic features of the resonator.
4. Conclusions
Aiming at characterizing the nonlinearity of microresonators, a stepped frequency sweeping method is proposed. Near the resonant frequency regime, a frequency stepping sinusoidal pulse sequence is used as the excitation signal. The amplitude-frequency responses are obtained from the forced vibration signals. A set of free vibration signals are acquired, containing different degrees of nonlinear dynamical characteristics. Instantaneous parameters are figured out from the free vibration signals by the Hilbert Transform. The noisy fluctuations of IFs and IAs are removed by a SSA algorithm. The resulting Backbone curves and FRF curves are legible and capable of characterizing the dynamic features.
The simulation results show that the proposed method has better anti-noise performance than FREEVIB. Furthermore, a vibrating ring gyroscope is tested experimentally. The extracted Backbone and FRF curves are in good agreement with those obtained by traditional frequency sweeping method. The processed results can be used as a guidance for operating circuit configuration and design optimization, etc. Particularly, the proposed method, using free damped oscillation signals, can better represent the dynamics features of the resonator than the frequency sweeping method, due to exclusion of other factors. The main advantage of the method lies in its improved convenience and efficiency, i.e., a single measurement is sufficient to obtain results equivalent to multiple frequency sweeping measurements. In addition, the proposed technique, as a practical and economic test method, can also be employed to measure the dynamic characteristics of other micromechanical systems.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 in Figure 2a), while relatively lower amplitudes are observed in other positions. When the system is excited at lower amplitude as shown in Figure 2a (B = 0.025 N, 0.05 N), the response amplitude shows a bilaterally symmetrical shape, indicating that system is operating in an approximately linear region. On the other hand, the resonant frequencies (marked with
in Figure 2a), while relatively lower amplitudes are observed in other positions. When the system is excited at lower amplitude as shown in Figure 2a (B = 0.025 N, 0.05 N), the response amplitude shows a bilaterally symmetrical shape, indicating that system is operating in an approximately linear region. On the other hand, the resonant frequencies (marked with  in Figure 9a) are truncated and processed. The obtained Backbone curves and FRF curves are given in Figure 12. Approximately linear performances can be seen in the curves of segments 11, 13, while those of segments 15, 17 reveal the softened nonlinearity. In practical terms, if the excitation amplitude is properly selected, the linearity and non-linearity of the system dynamics can be obtained in a single measurement cycle.
in Figure 9a) are truncated and processed. The obtained Backbone curves and FRF curves are given in Figure 12. Approximately linear performances can be seen in the curves of segments 11, 13, while those of segments 15, 17 reveal the softened nonlinearity. In practical terms, if the excitation amplitude is properly selected, the linearity and non-linearity of the system dynamics can be obtained in a single measurement cycle.