1. Introduction
In the field of condition monitoring for rotating machinery, the vibration information, such as vibration accelerometer signal, vibration velocity signal, and vibration displacement signal, is often used for detecting faults and distinguishing fault types. Feature extraction of vibration signals is important for condition diagnosis [
1,
2]. However, feature extraction for condition diagnosis is difficult because the vibration signals measured for condition diagnosis contain strong noise component. Useful information is buried under stronger noise. In such case, the feature of machine condition could not be obtained and even the wrong conclusion will be induced. Thus, it is important that the feature of the signal can be sensitively extracted at the state change of a machine [
3].
Many studies based on vibration signal processing technology have been carried out with the goal of machinery condition diagnosis [
4,
5,
6,
7]. Fourier analysis has been the dominating signal processing tool for condition diagnosis. In [
8], Fourier analysis was used to identify the gear faults in planet cage. In [
9], Fourier transform has been applied to detect rolling bearing faults. Unfortunately, there are some limitations of the Fourier transform, such as the fact that the signal to be analyzed must be strictly periodic or stationary. However, in practice, machinery operate under unsteady condition, such as varied rotating speed and operating load. In such case, even though the machinery is in the normal state, the spectrum feature and the frequency components of vibration signal are always changing with time. Thus the Fourier transform has no application to analyze non-stationary signal and can not reveal the inherent information of non-stationary signals [
10,
11]. Time frequency analysis methods, such as Wavelet Transforms (WT), Short Time Fourier Transform (STFT),
etc., are effective tools for analyzing the non-stationary signals. These technologies can simultaneously provide the joint distribution information of signals in time domain and frequency domain, and describe the energy density or intensity of the signal at different times and frequencies. In [
12], STFT and Hilbert-Huang transform (HHT) analysis were integrated to detect faults of ball bearings for wind turbine. However, the result of the STFT method depends on the choice of the windows size. Moreover, computational cost the STFT is high. WT has got huge success in fault diagnostics of rotating machinery for its ability to focus on localized structures in time frequency domain. WT can decompose the signal into many basis functions and extract signal features through change of the scales and time shifts of the basis function. In [
13], WT method was employed to extract fault features of external load changing and the asymmetry of three-phase in induction motor. In [
14], the broken-bar fault of induction motor was detected based on discrete WT. However, the feature extraction results of WT rest with the choice of wavelet basis function. Only selecting the appropriate basis function, the features of signal can work well to detect faults. In addition, due to the limited length of the wavelet base function, energy loss is inevitable [
15]. Empirical mode decomposition (EMD) technique was proposed by Huang
et al., for non-linear and non-stationary signal processing. EMD is a self adaptive signal processing technology that could decompose a non-linear and non-stationary signal into a set of intrinsic mode functions (IMFs). However, undesired frequency components in results and undesired low amplitude IMFs at the low-frequency region remain unsolved in EMD [
16,
17,
18,
19]. In addition, there are many noise cancelling methods that have also been applied, such as band pass filter [
20], Kalman filter [
21], Wiener filter [
22], and so on. However, due to their flaws and shortcomings, these methods cannot always be applied to failure feature extraction. For example, band pass filter cannot cancel the wide band noise; when using Wiener filter and Kalman filter to process signal, the signal must follow the normal distribution.
The number of the artificial intelligence techniques, such as artificial neural networks (ANN), ant colony optimization (ACO), Bayesian belief network (BBN)
etc., have been widely applied to fault diagnosis of plant machinery. In [
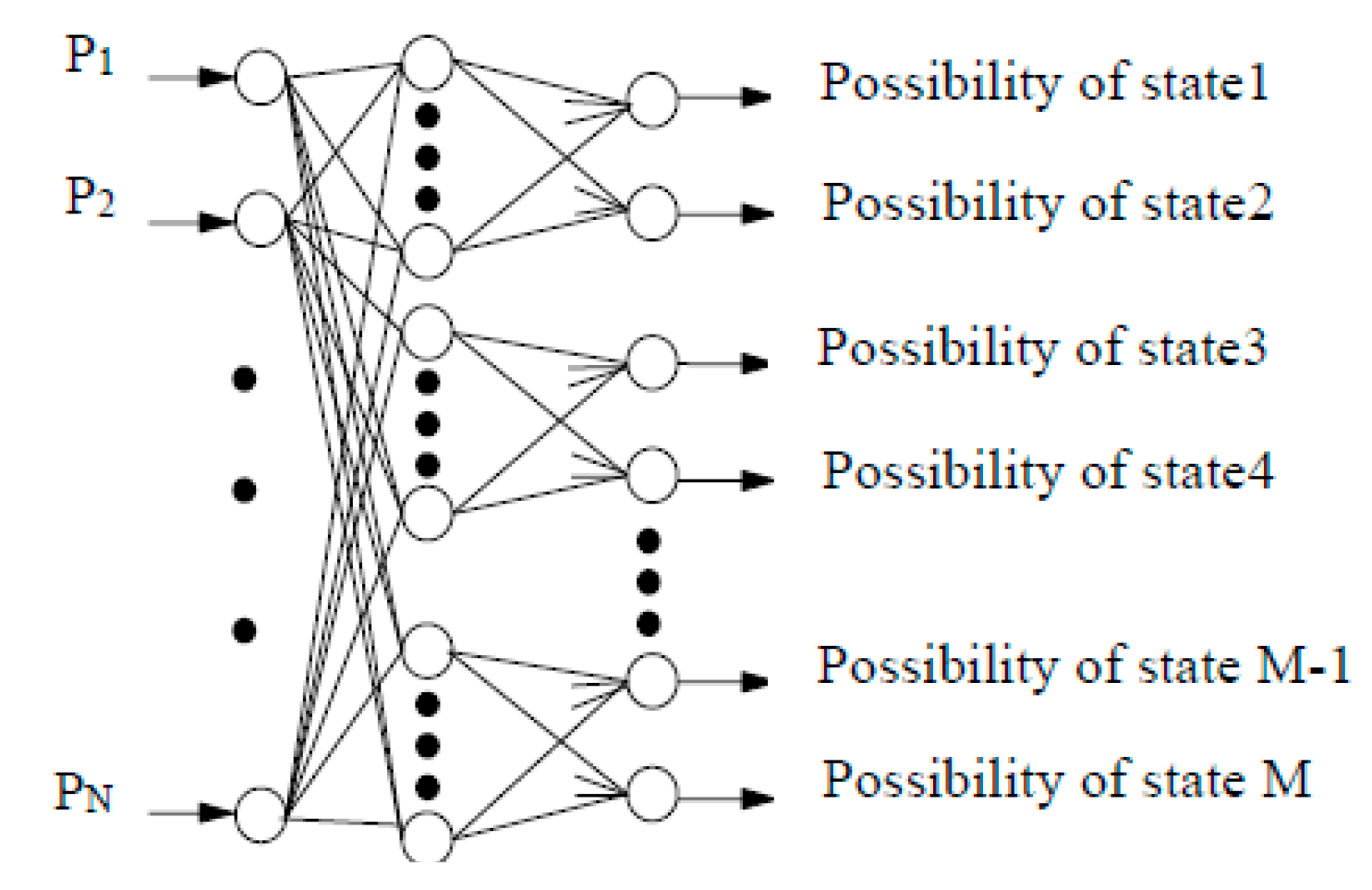
23], three architecture NN, single-layer, multilayer perceptron network and counter propagation network, were introduced to detect 10 faults of a heat exchanger. In [
2], an improved NN called partially-linearized neural network (PLNN) was presented to distinguishing the three types defect occurred in a rolling bearing. However, NN is not suitable for dealing with ambiguous diagnosis problems, and will never converge if SPs calculated by signals measured in different states have the same value. ACO algorithm imitates the behavior to solve optimization problems. In [
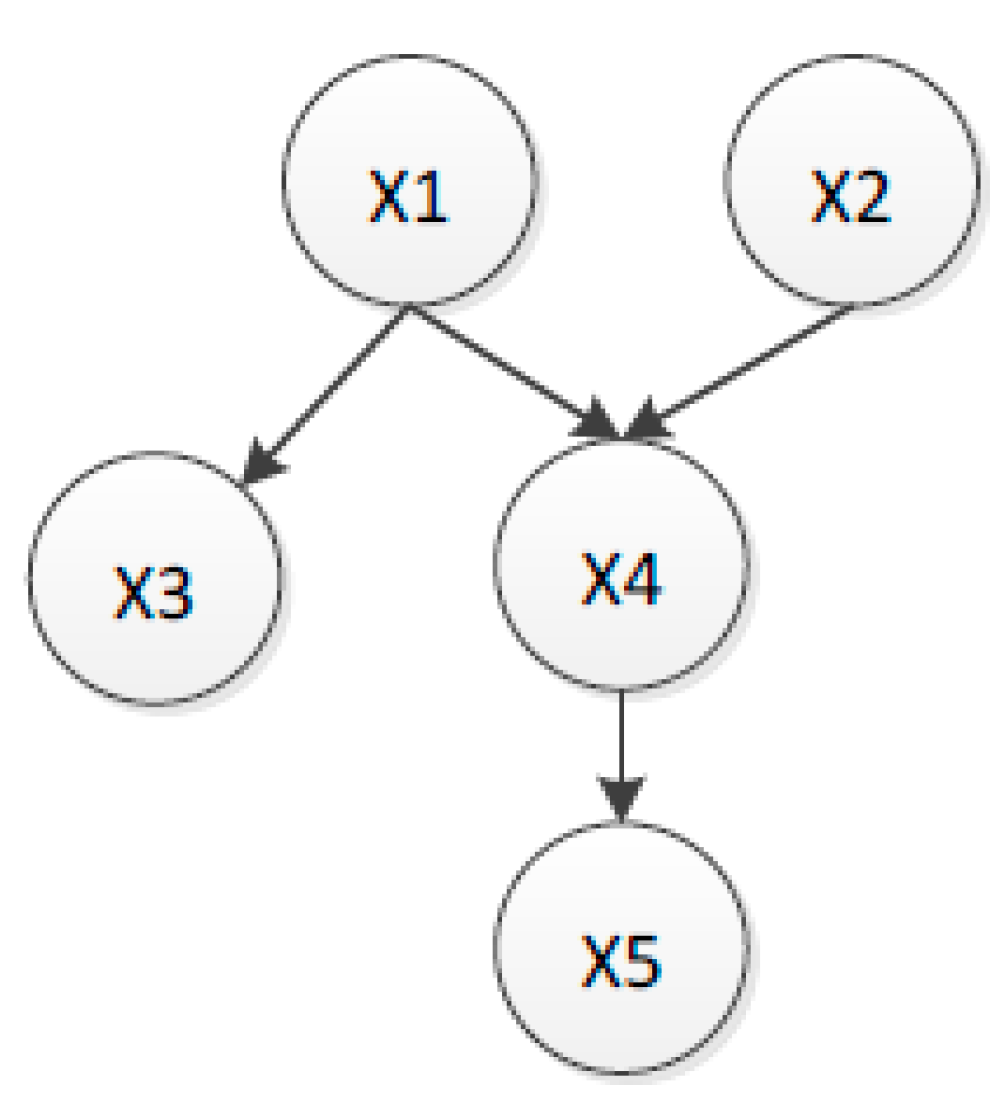
24], ACO and DWT were integrated to detect faults of a rolling bearing used in the centrifugal fan system. However, ACO method is easy to trap into local optimum. In many cases, the optimization solution cannot be found. BBN is a powerful tool to represent and reason about complex systems with uncertain, incomplete and conflicting information [
25,
26]. A BBN enables us to model and reason about uncertainty, ideally suited for diagnosing real world problems where uncertain incomplete data exist. Therefore, it is a suitable solution for troubleshooting complex rotation machinery systems. In the last decades, BBN has been widely applied in condition diagnosis of plant machinery. References [
27,
28,
29] are successful cases of BBN being used to detect fault of complex systems, such as nuclear power systems [
27], aircraft engines [
28], semiconductor manufacturing systems [
29],
etc.To extract the fault feature of signals more effectively and discriminate conditions of rotation machinery more correctly, a novel method based on adaptive statistic test filter and Diagnostic Bayesian Network algorithm (DBN) for condition diagnosis of rotating machinery is presented. Structure of this paper is as follows:
Section 2 instructs feature extraction method based on ASTF and evaluation factor
Ipq. The optimal level of significance α is obtained by using PSO. In
Section 3, the ten SPs for condition diagnosis are defined and PCA is employed to obtain high sensitive SPs for condition diagnosis. In
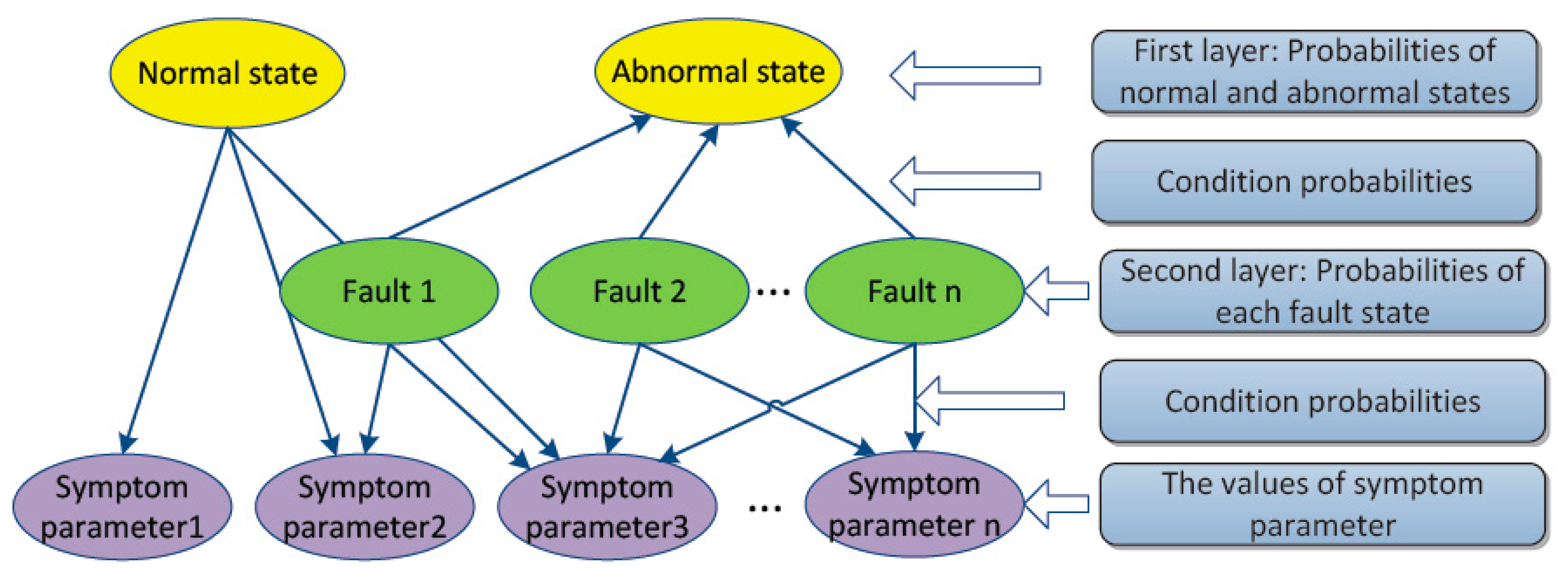
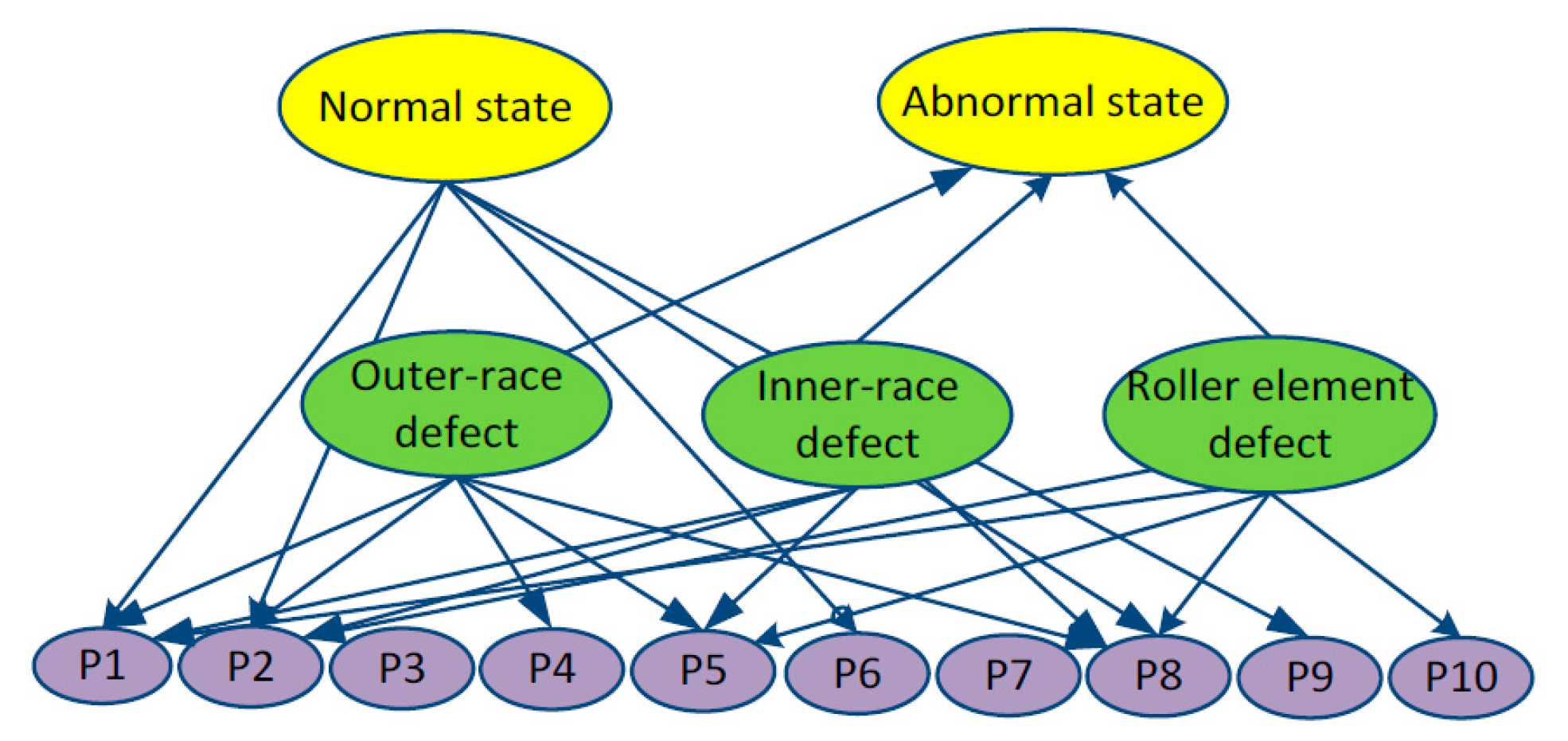
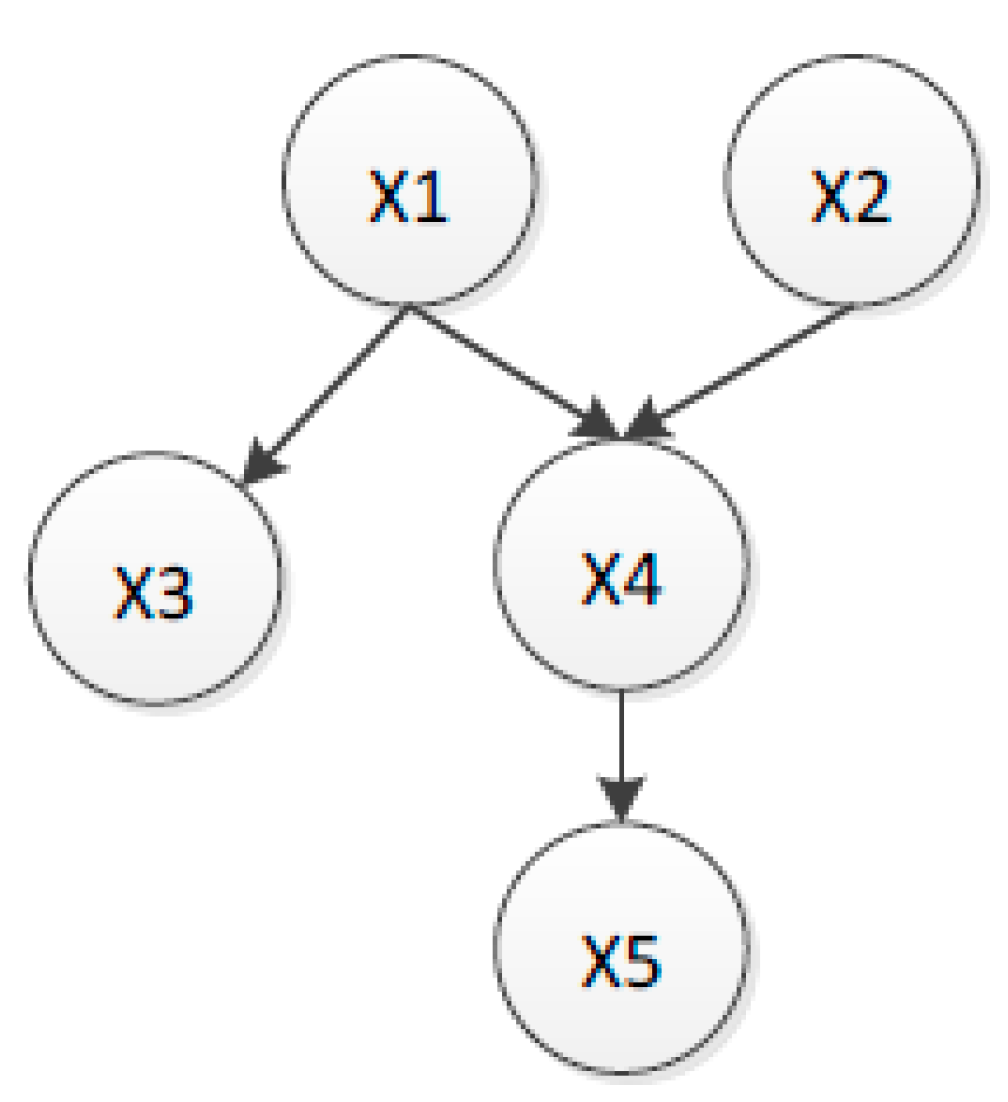
Section 4, a three-layer DBN is built to identify condition of rotation machinery based on BBN theory.
Section 5 shows a practical example of fault diagnosis for verifying the effectiveness of the proposed method. Summary and conclusions are given in
Section 6.
2. Feature Extraction by ASTF
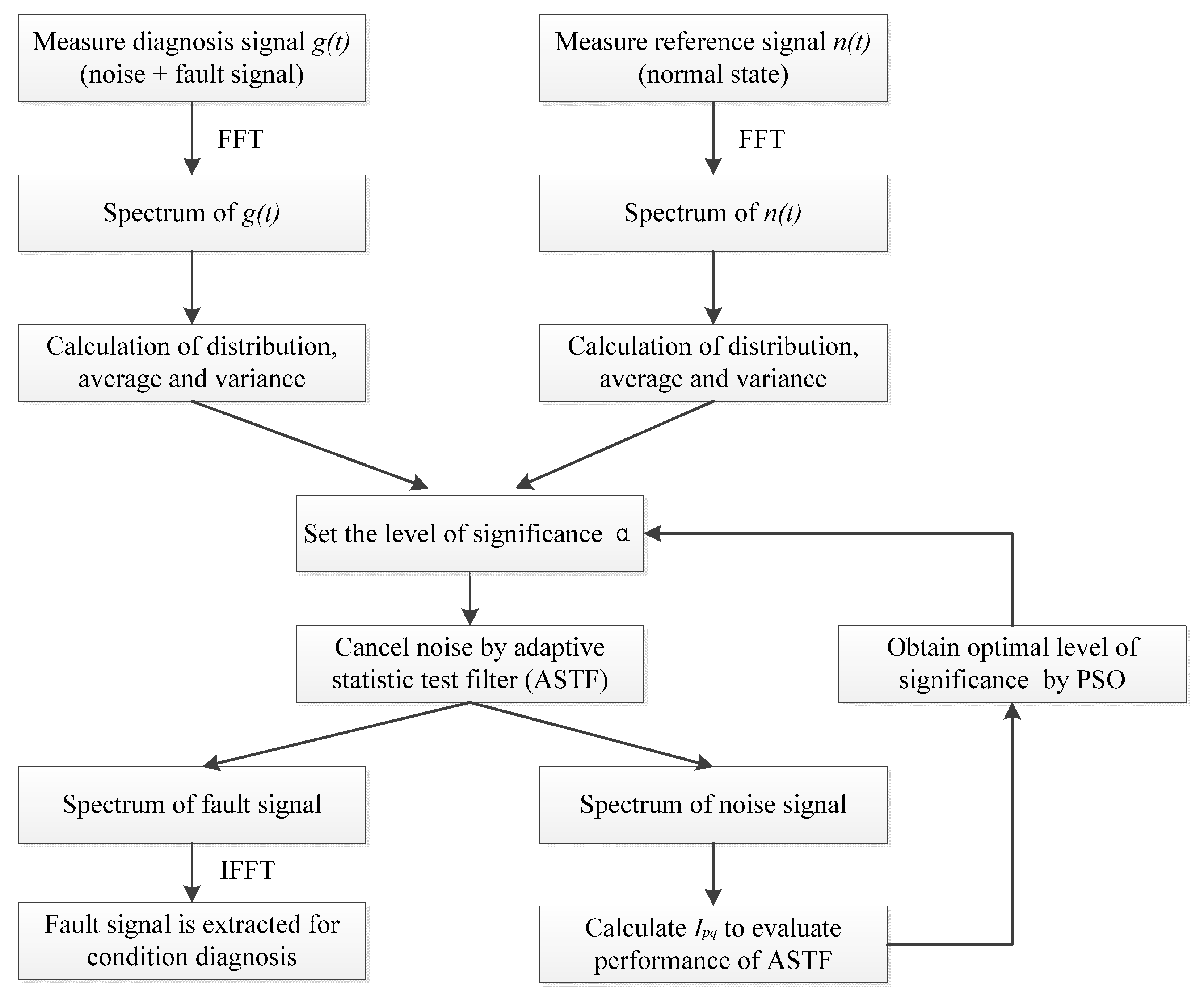
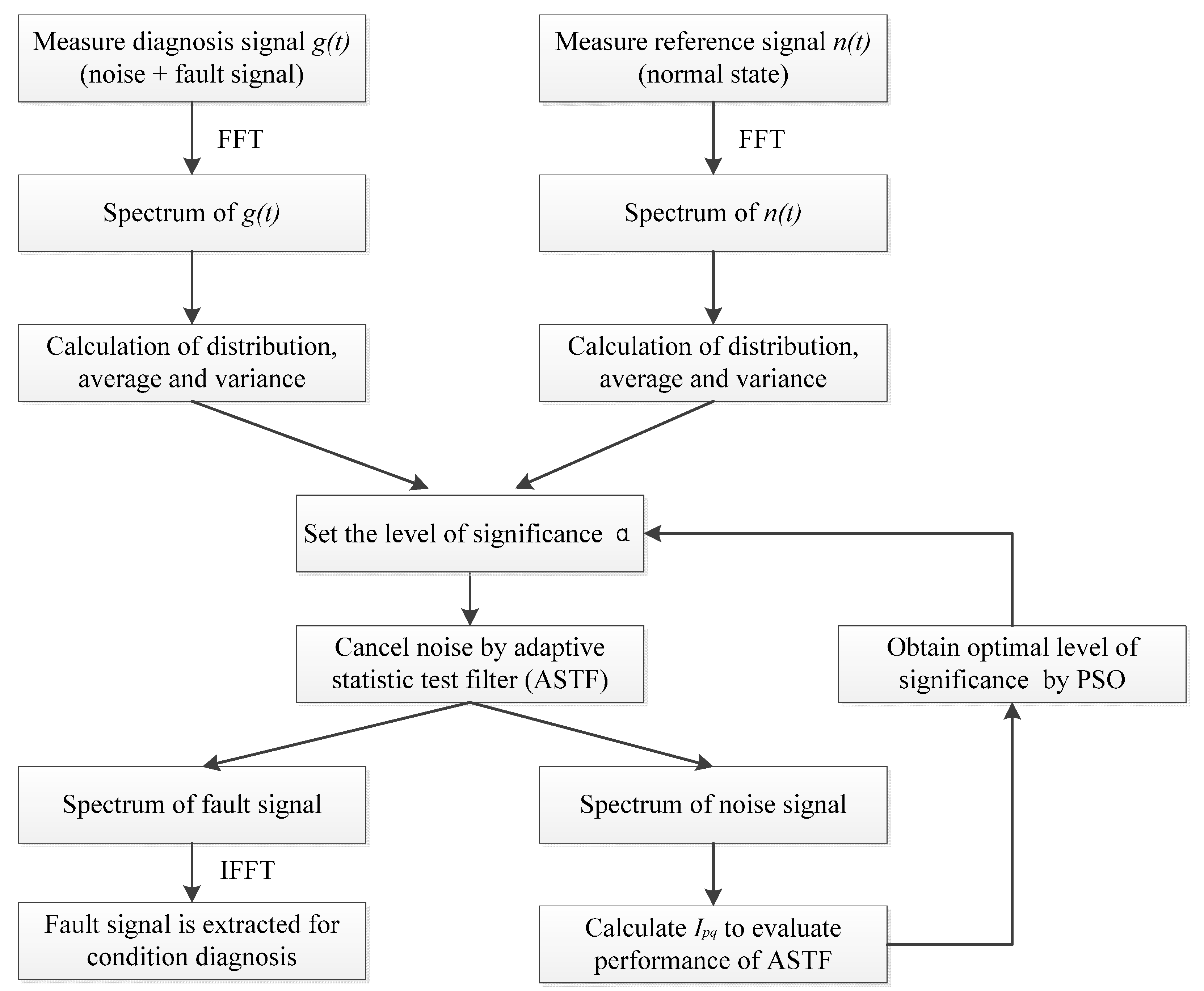
In this study, a new weak fault feature extraction method called adaptive statistic test filter (ASTF) is proposed. Principle of ASTF is based on statistic hypothesis testing in the frequency domain to evaluate similarity between reference signal (noise signal) and original signal, and remove the component of high similarity. Otherwise, the optimal level of significance α is obtained using PSO. The procedure for applying STF for the condition diagnosis is proposed, as shown in
Figure 1.
Figure 1.
Procedure for applying the ASTF for the condition diagnosis.
Figure 1.
Procedure for applying the ASTF for the condition diagnosis.
The reference signal
n(t) is measured in a normal state in advance. The original signal
g(t) is measured in the state to be detected and polluted by noise.
and
indicate the average value of
n(t) and
g(t) in the frequency domain, respectively; and
and
indicate the variance value of
n(t) and
g(t) in the frequency domain, respectively. The two null hypotheses are as follows:
Firstly,
is verified by
F test with
m − 1 degree of freedom, and
F =
Sn2/
Sg2.
If , is verified by t test with 2m − 2 degree of freedom, and .
If
,
.
If both null hypotheses would prove to be received, the spectrum component of the original signal g(t) at the frequency f is similar to that of the reference signal n(t). The component at the frequency f does not contain fault information and will be removed. If alternative hypothesis is denied, it means that the spectrum component of the original signal g(t) at the frequency f is not similar to that of the reference signal n(t). The component at the frequency f contains fault information.
After STF, the original signal
g(t) is decomposed into estimated fault signal
g*(t) and estimated noise signal
n*(t). In order to appraise the performance of STF, evaluation factor
Ipq is defined.
qi and
qi* are the number that
n(t) and
n*(t) cross over some level
i of the vertical coordinate of the power spectrum
Fn2(
fk) with a positive slope in unit time and can be calculated as follows:
where
.
Ipq is defined as follows:
It is obvious that the smaller the value of the Ipq, the more similar n(t) and n*(t) will be, and therefore, the better the STF will be. Thus, Ipq is able to express the similarity degree between n(t) and n*(t); that is to say, Ipq can be used to evaluate the performance of STF.
To obtain optimal level of significance α, an adaptive PSO algorithm is proposed in this paper. PSO algorithm is based on groups, and solves an unconstrained D-dimensional optimization problem by minimization of the objective or the fitness function [
30,
31,
32]. In this study, the fitness function is the evaluation factor
Ipq (Equation (11)). In PSO algorithm, each particle keeps track of its own position denoted by
and velocity denoted by
in the problem space, according to its own and neighboring particle experience [
22,
23,
24]. The best previous position of particle is marked by the lowest fitness value and indicated by
. The best position among all particles experienced discovered by the swarm, so far, is defined as
. Then, the new positions and velocities of the particles are updated by the following equations:
where
r1 and
r2 indicate random numbers between 0~1.
η1 is the cognitive parameter (acceleration coefficient).
η2 is the social parameter (acceleration coefficient). The inertia weight
ω controls the previous velocity of particle, and
ω adaptively adjust as follows:
where
q is a random number with a uniform probability between 0~1;
k1 and
k2 are parameters, and
k1 >
k2 , the choice of
k1 and
k2 is determined experimentally, here
k1 = 0.5 and
k2 = 0.2. R indicates change rate, which defined as Equation (15); if
R is greater than 0.05, PSO is in the exploration stage, a large
ω is beneficial to the algorithm’s convergence; if
R is less than 0.05, PSO is in the development stage, a small
ω is beneficial to searching optimum point.
where
Ipq(t) is minimization evaluation factor value of the
t-th iteration.
Ipq(
t + 5) is minimization evaluation factor value of the (
t + 5)-th iteration.
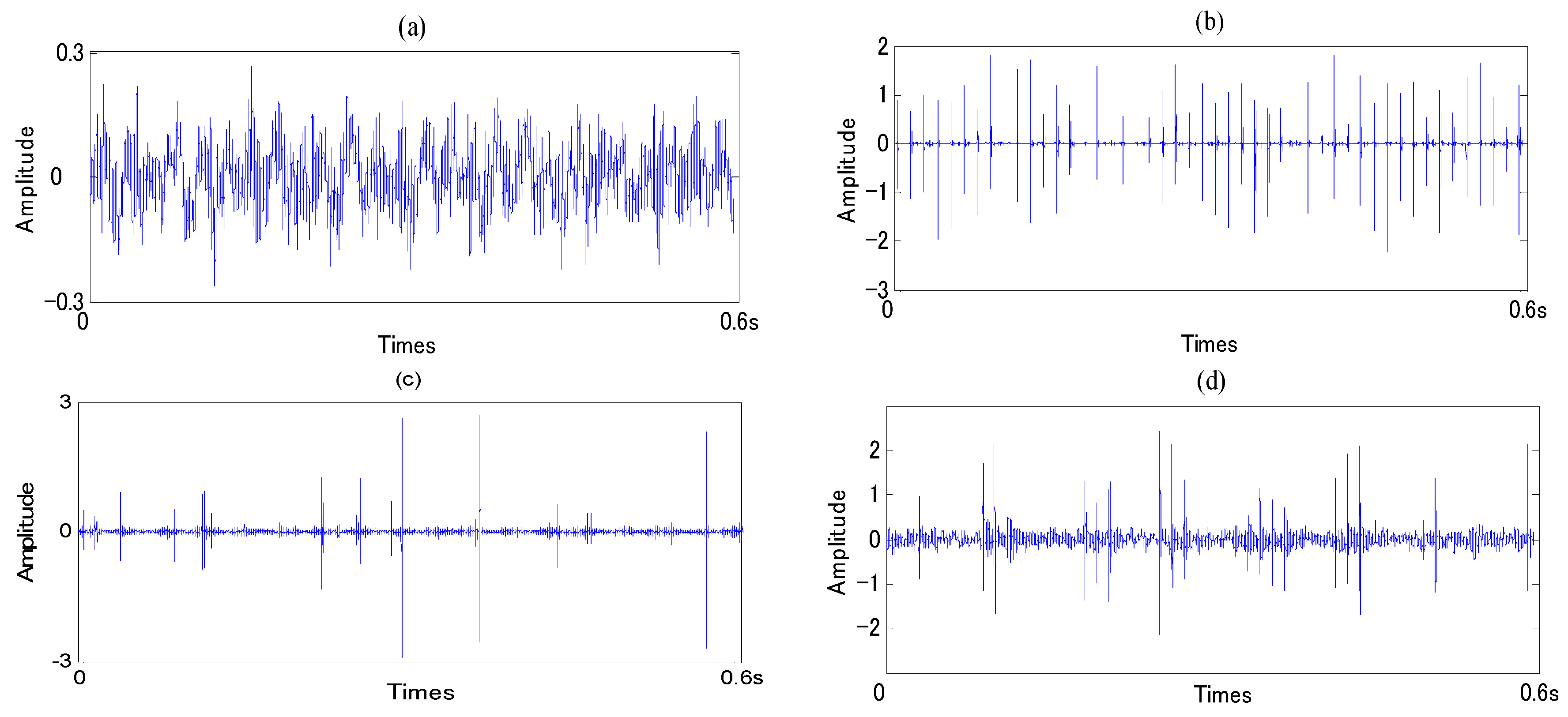
In order to test and verify capability of ASTF, a simulation experiment is designed. Ten set signals that consist of the impulsive signal with the period of 0.015 s and random white Gaussian noise are produced using Matlab software to simulate a bearing fault. These noisy signals are processed by ASTF and a high pass filter with 5000 Hz cut off frequency, respectively. The performances of denoising are estimated based on SNR. Mathematical expression of the impulsive signal is shown in Equation (16).
where
ξ indicates coefficient of damping and
ξ = 0.2;
ωn expresses natural frequency and
ωn = 3 kHz; and
x0 denotes displacement constant and
x0 = 2.
Figure 2 shows the SNR of denoised signals processed by ASTF and high pass filter. As shown in
Figure 2, all of the SNR values of denoised signals after ASTF are much greater than high pass filter. Then, ASTF method is effective and has high robustness for signal denoising.
Figure 2.
Signal-to-Noise Ratio (SNR) of denoised signals processed by each method.
Figure 2.
Signal-to-Noise Ratio (SNR) of denoised signals processed by each method.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}