
Energy Efficient Moving Target Tracking in Wireless Sensor Networks

Abstract
:1. Introduction
2. Problem Formulation
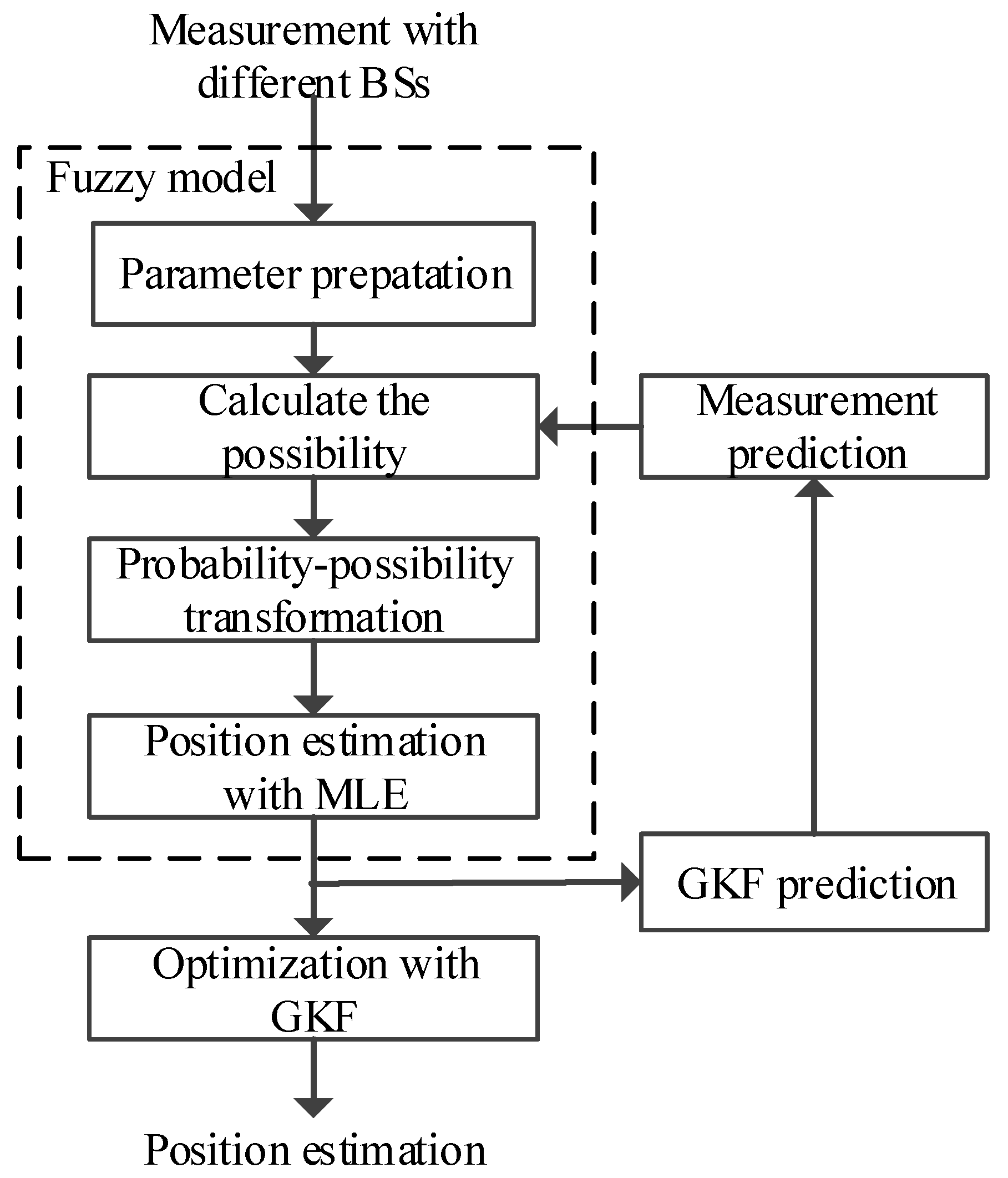
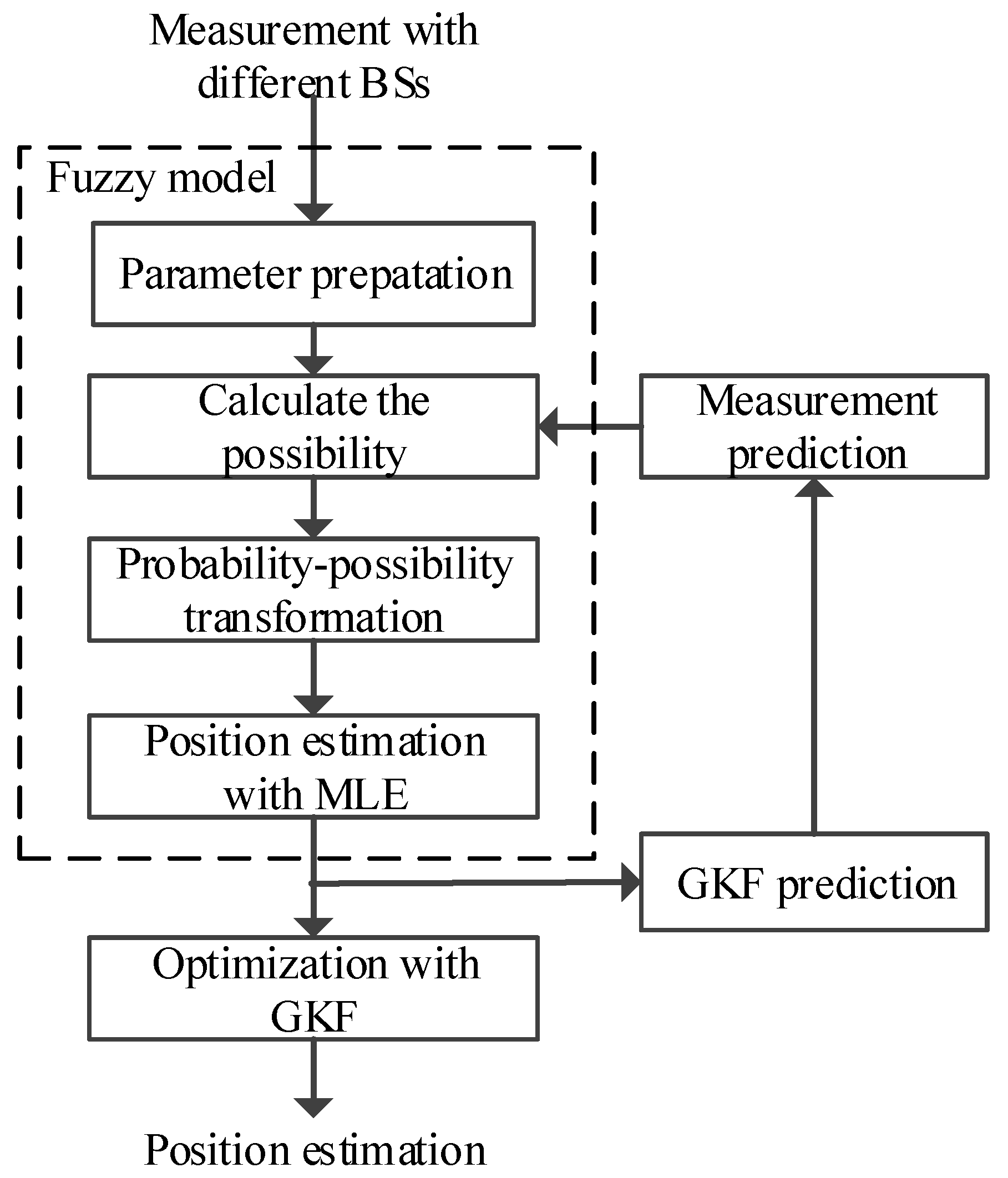
3. Proposed Approach
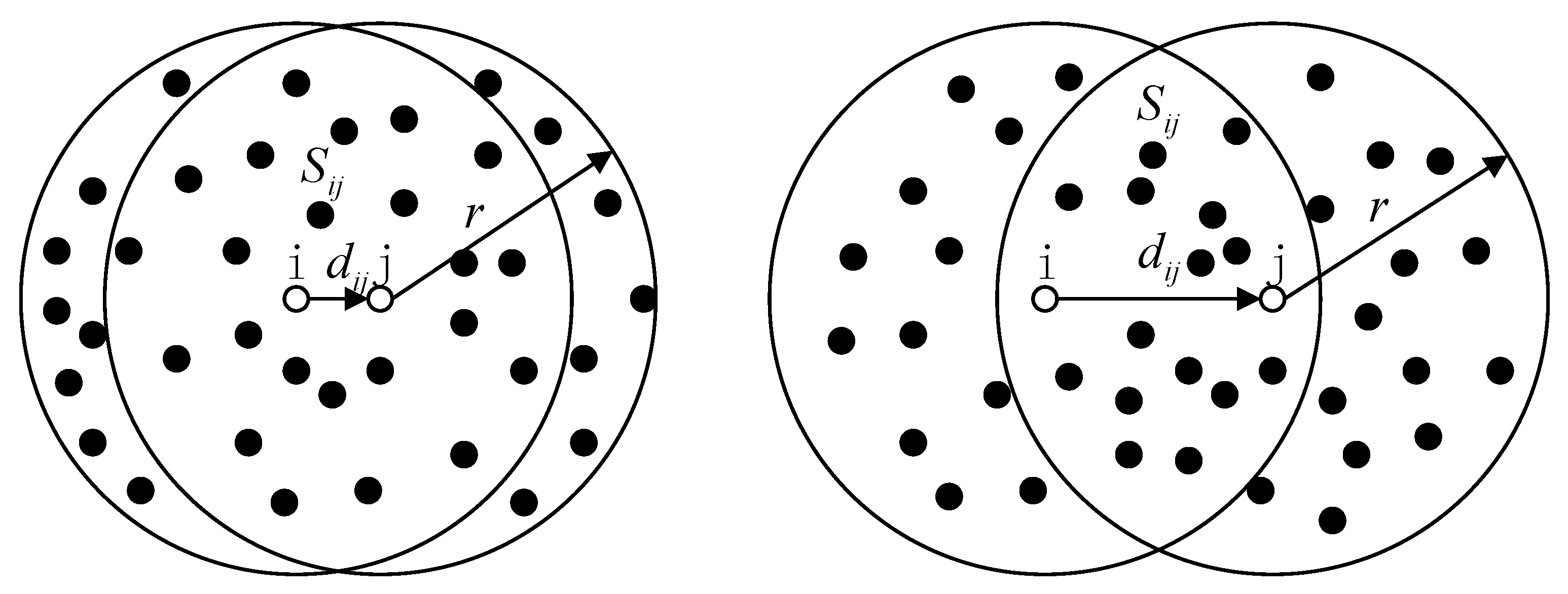
3.1. Measurement Selection

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Law | x | ϵ | ||
|---|---|---|---|---|
| Gaussian Law | 0.12 | |||
| Exponent Law | 0.13 | |||
| Triangular Law | 0.11 | |||
| Uniform Law | 0 |
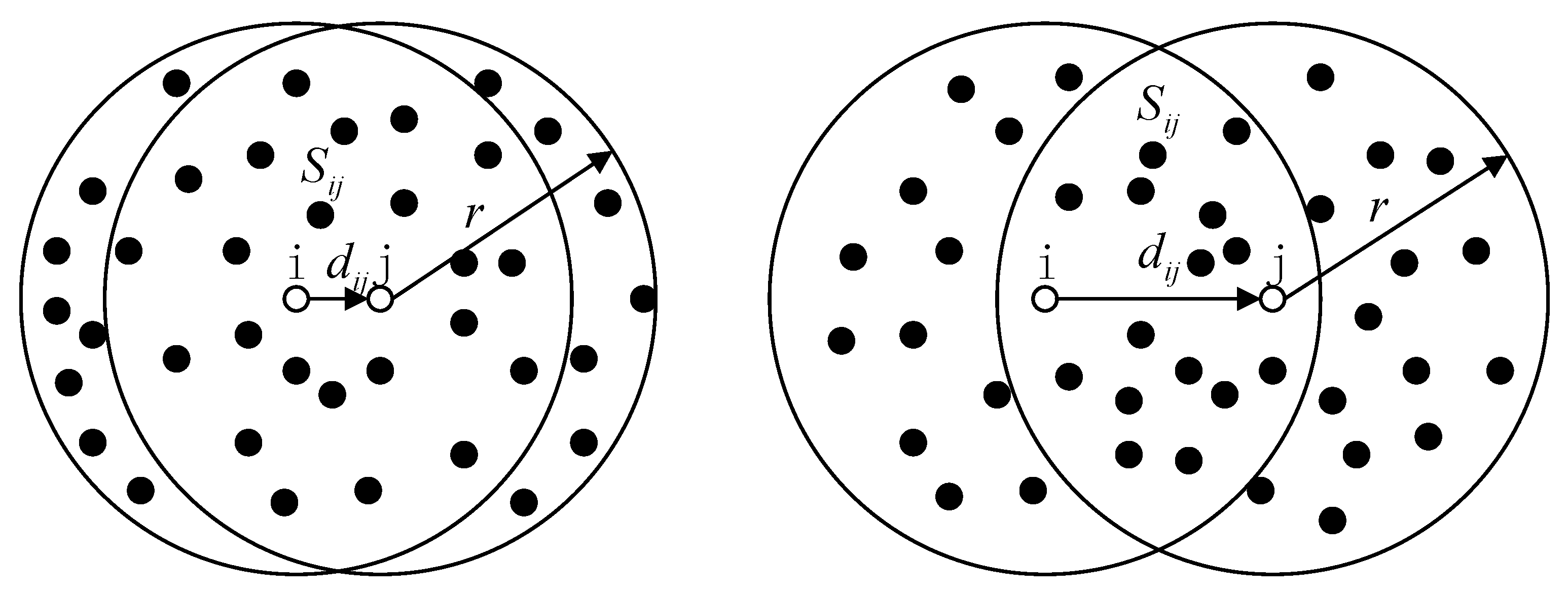
3.2. Position Estimation with Neighborhood Function
3.3. Optimization with Generalized Kalman Filter
4. Simulation Results
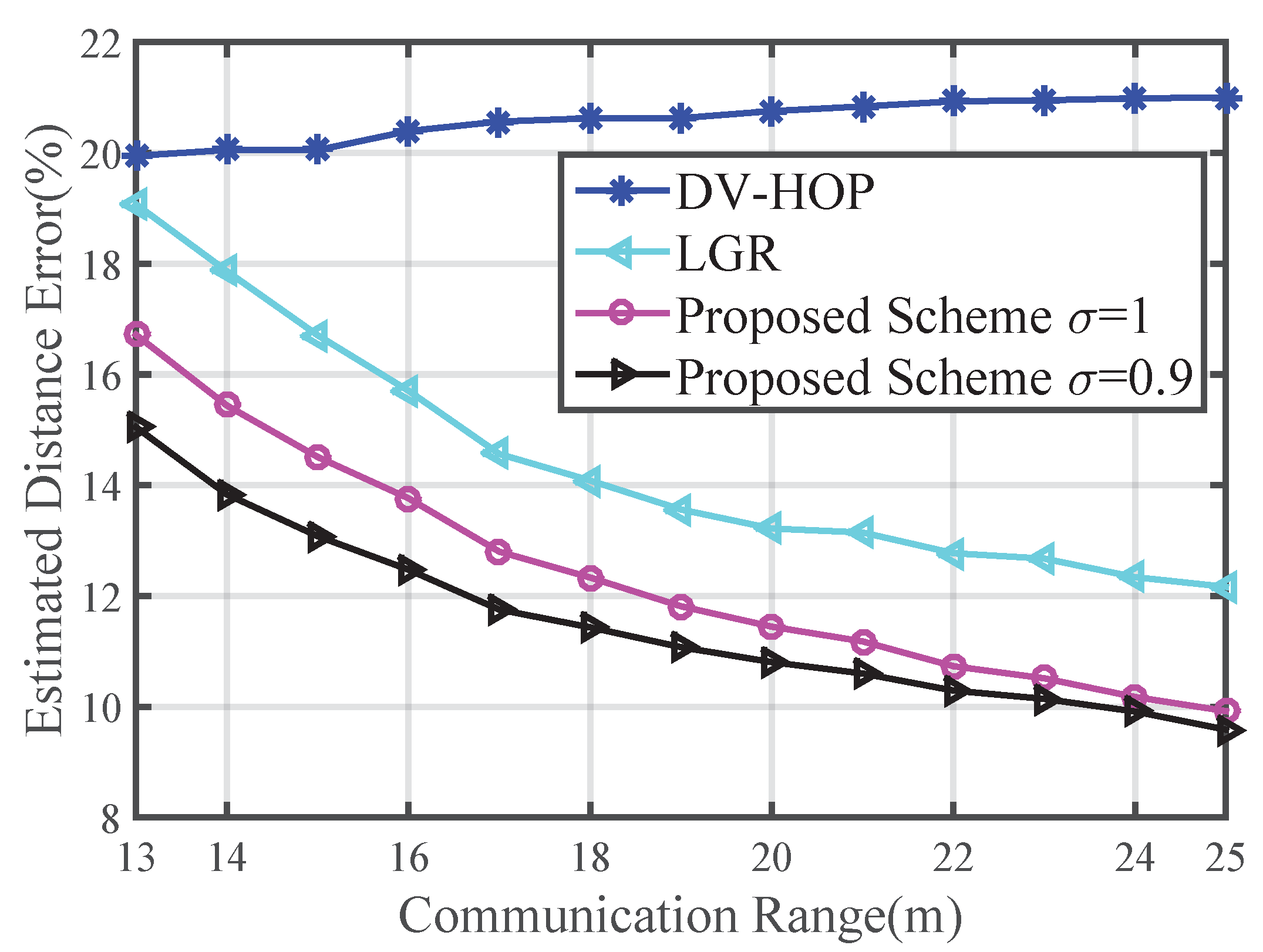
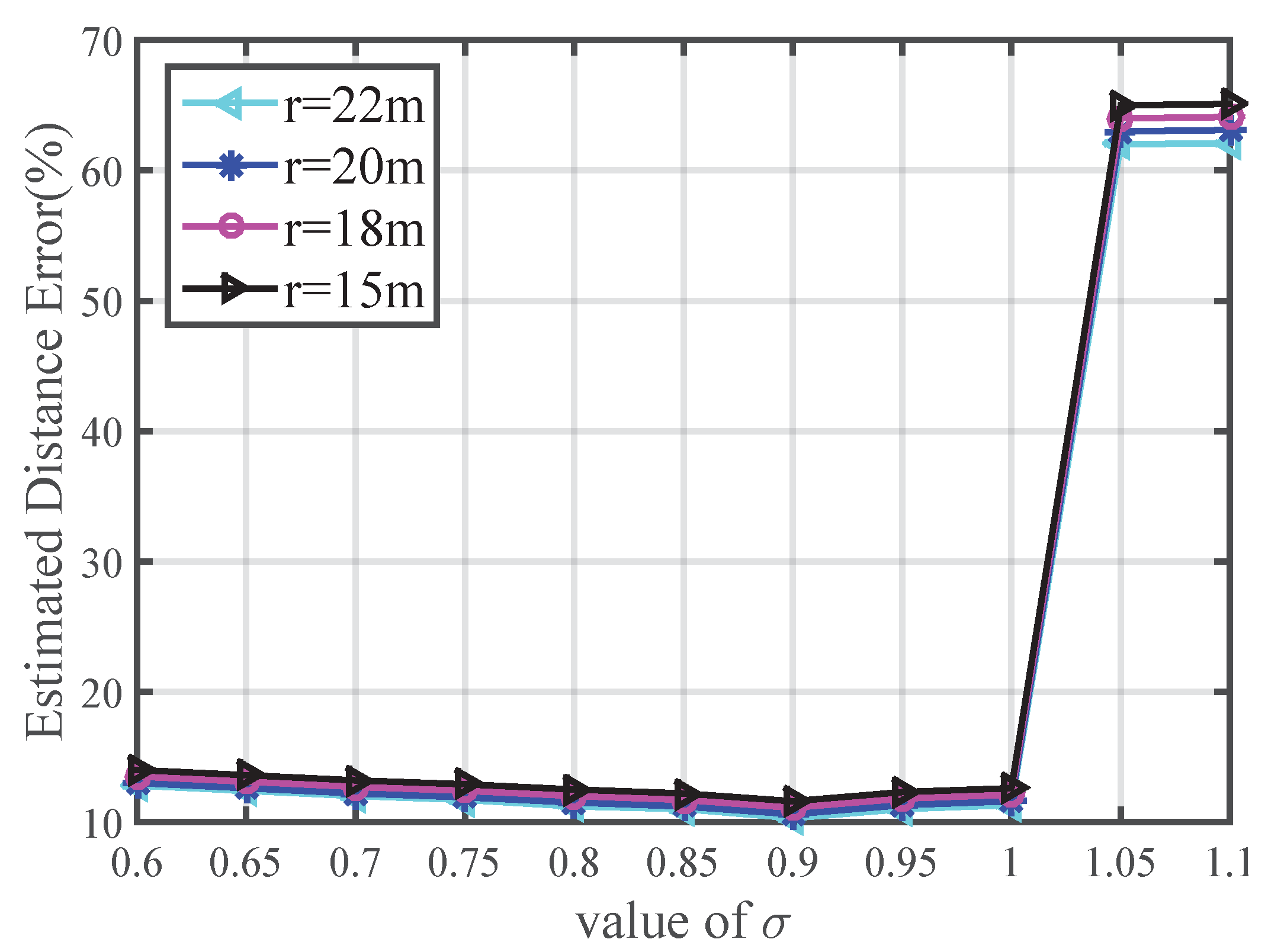
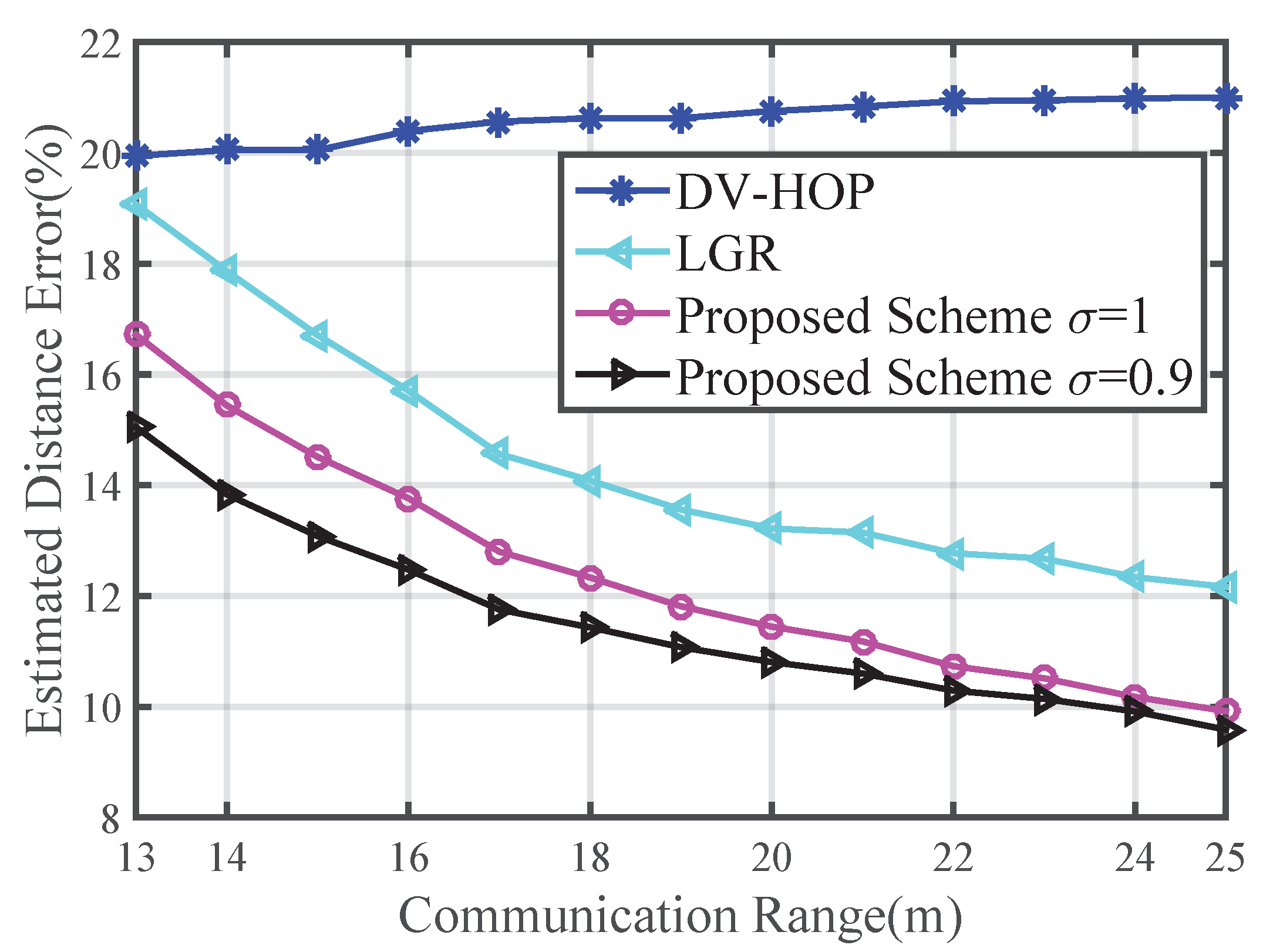
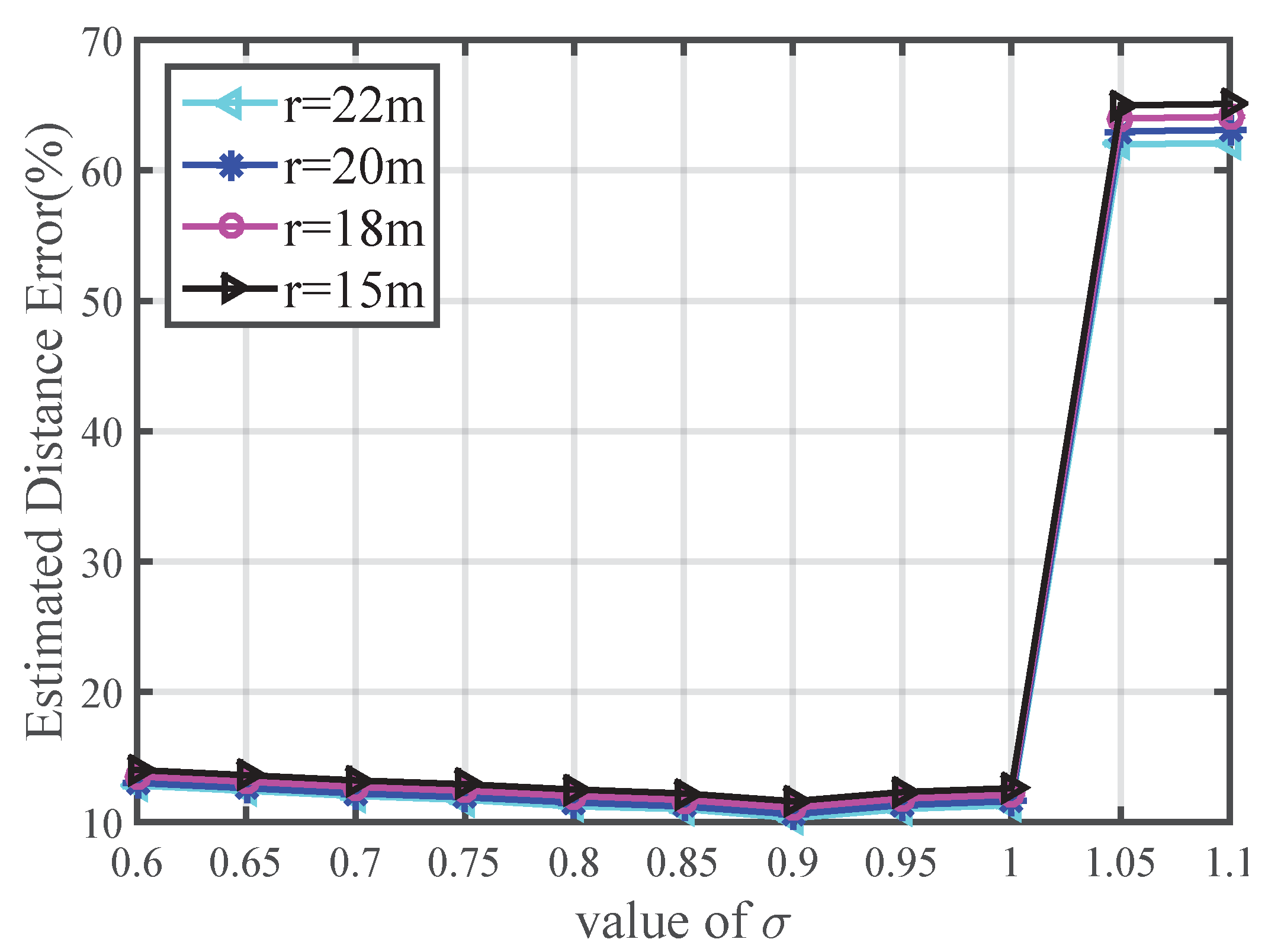
4.1. Comparison of Estimated Distance Error
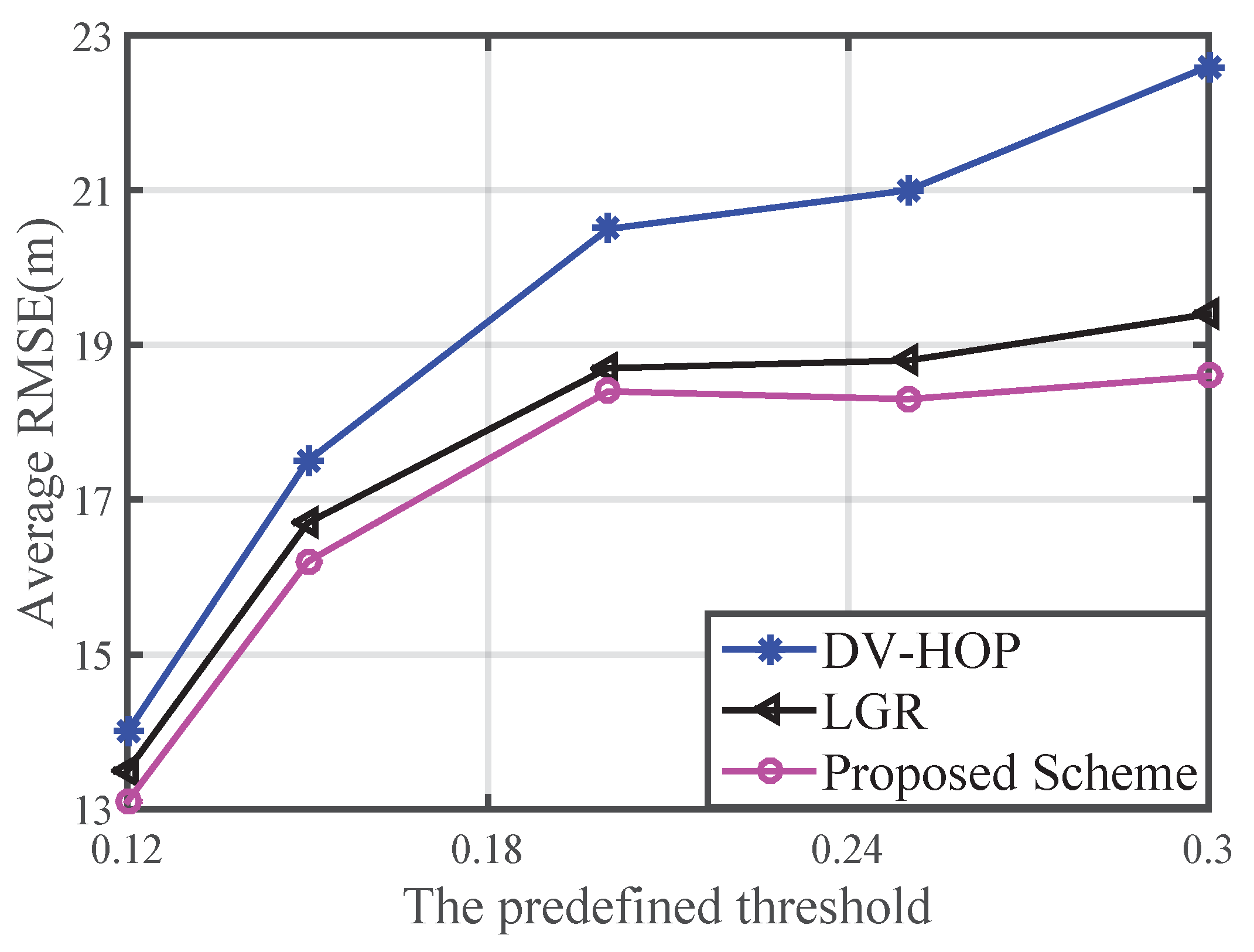
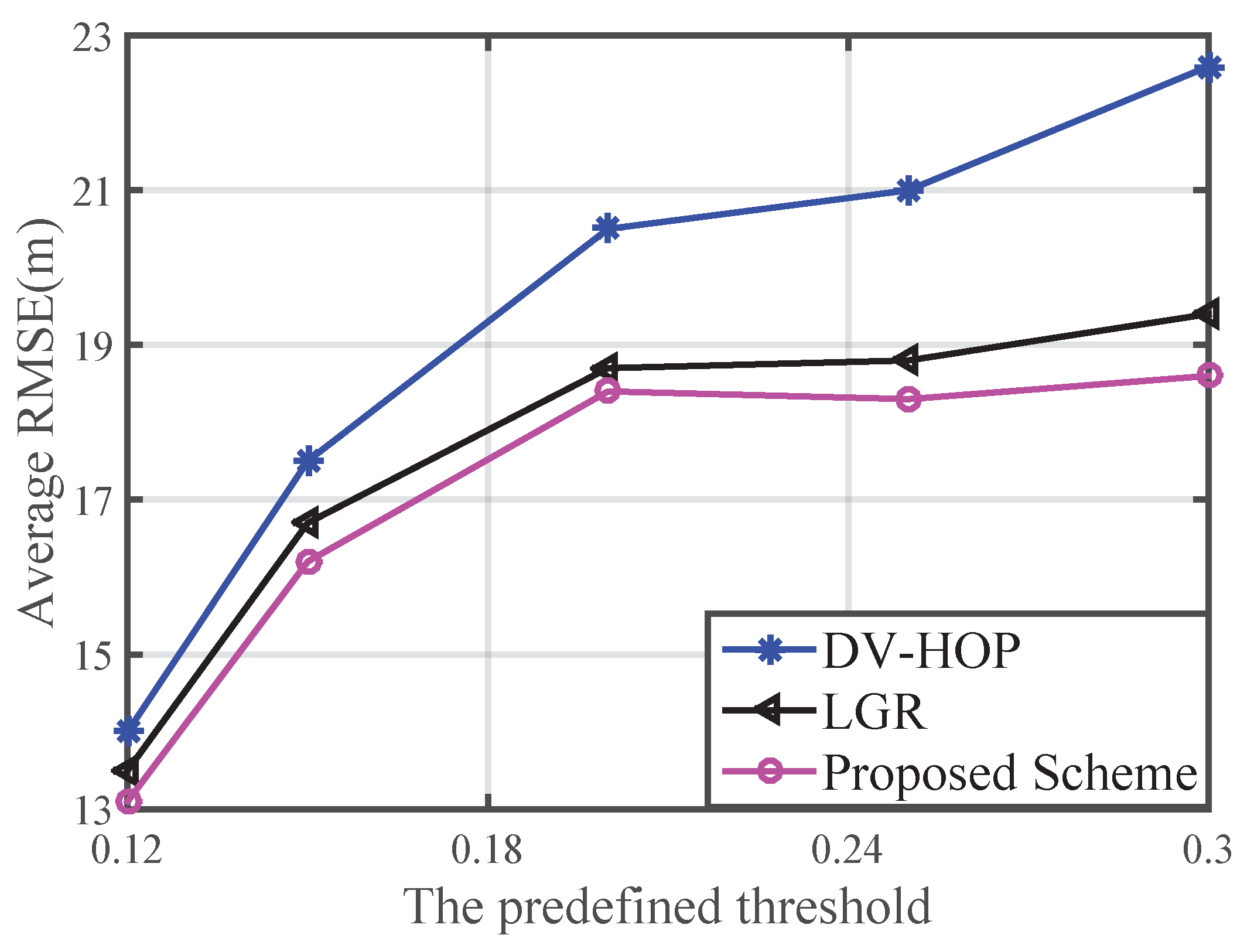
4.2. Comparison of the Averages of Root Mean Square Error
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akyildiz, I.F.; Melodia, T.; Chowdhury, K.R. A survey on wireless multimedia sensor networks. Comput. Netw. 2007, 51, 921–960. [Google Scholar] [CrossRef]
- Bokareva, T.; Hu, W.; Kanhere, S.; Ristic, B.; Bessell, T.; Rutten, M.; Jha, S. Wireless sensor networks for battlefield surveillance. In Proceedings of the Land Warfare Conference, Brisbane, Australia, 24–27 October 2006; pp. 1–8.
- Xu, Y.; Yan, H.; Mubeen, S.; Zhang, H. An elderly health care system using wireless sensor networks at home. In Proceedings of the Sensor Technologies and Applications, Athens, Glyfada, Greece, 18–23 June 2009; pp. 158–163.
- Mainwaring, A.; Culler, D.; Polastre, J.; Szewczyk, R.; Anderson, J. Wireless sensor networks for habitat monitoring. In Proceedings of the 1st ACM International Workshop on Wireless Sensor Networks and Applications, New York, NY, USA, 28 September 2002; pp. 88–97.
- Olfati-Saber, R.; Sandell, N.F. Distributed Tracking in Sensor Networks with Limited Sensing Range. In Proceedings of the 2008 IEEE American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 3157–3162.
- Zhang, T.; Wu, R. Affinity Propagation Clustering of Measurements for Multiple Extended Target Tracking. Sensors 2015, 15, 22646–22659. [Google Scholar] [CrossRef] [PubMed]
- Wu, P.; Li, X.; Kong, J.; Liu, J. Heterogeneous Multiple Sensors Joint Tracking of Maneuvering Target in Clutter. Sensors 2015, 15, 17350–17365. [Google Scholar] [CrossRef] [PubMed]
- Yazdi, E.T.; Moravejosharieh, A.; Ray, S.K. Study of Target Tracking and Handover in Mobile Wireless Sensor Network. In Proceedings of IEEE Conference on Information Networking, Phuket, Tailand, 10–12 February 2014; pp. 120–125.
- Tsai, H.W.; Chu, C.P.; Chen, T.S. Mobile object tracking in wireless sensor networks. Comput. Commun. 2007, 30, 1811–1825. [Google Scholar] [CrossRef]
- Zhang, W.; Cao, G. DCTC: Dynamic convoy tree-based collaboration for target tracking in sensor networks. IEEE Trans. Wirel. Commun. 2004, 3, 1689–1701. [Google Scholar] [CrossRef]
- Gui, C.; Mohapatra, P. Power conservation and quality of surveillance in target tracking sensor networks. In Proceedings of the 10th Annual International Conference on Mobile Computing and Networking, New York, NY, USA, 26 September 2004; pp. 129–143.
- Mehta, K.; Liu, D.; Wright, M. Protecting location privacy in sensor networks against a global eavesdropper. IEEE Trans. Mob. Comput. 2012, 11, 320–336. [Google Scholar] [CrossRef]
- Alaybeyoglu, A.; Kantarci, A.; Erciyes, K. A dynamic lookahead tree based tracking algorithm for wireless sensor networks using particle filtering technique. Comput. Electron. Eng. 2014, 40, 374–383. [Google Scholar] [CrossRef]
- Younis, M.; Youssef, M.; Arisha, K. Energy-aware routing in cluster-based sensor networks. In Proceedings of 10th IEEE International Symposium on Modeling, Analysis and Simulation of Computer and Telecommunications Systems, Fort Worth, TX, USA, 11–16 October 2002; pp. 129–136.
- De San Bernabe, A.; Martinez De Dios, J.R.; Ollero, A. Efficient Cluster-Based Tracking Mechanisms for Camera-Based Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2014, 14, 1820–1832. [Google Scholar] [CrossRef]
- Jiang, B.; Ravindran, B.; Cho, H. Probability-based prediction and sleep scheduling for energy-efficient target tracking in sensor networks. IEEE Trans. Mob. Comput. 2013, 12, 735–747. [Google Scholar] [CrossRef]
- Teng, J.; Snoussi, H.; Richard, C.; Zhou, R. Distributed variational filtering for simultaneous sensor localization and target tracking in wireless sensor networks. IEEE Trans. Vehicul. Technol. 2012, 61, 2305–2318. [Google Scholar] [CrossRef]
- Xu, Y.; Winter, J.; Lee, W.C. Prediction-based strategies for energy saving in object tracking sensor networks. In Proceedings of the IEEE International Conference on Mobile Data Management, Berkeley, NJ, USA, 19–22 January 2004; pp. 346–357.
- Bhuiyan, M.; Wang, G.; Vasilakos, A. Local Area Prediction-Based Mobile Target Tracking in Wireless Sensor Networks. IEEE Trans. Comput. 2014, 64, 1968–1982. [Google Scholar] [CrossRef]
- Deldar, F.; Yaghmaee, M.H. Designing an energy efficient prediction-based algorithm for target tracking in wireless sensor networks. In Proceedings of the IEEE International Conference on Wireless Communications and Signal Processing, Nanjing, China, 9–11 November 2011; pp. 1–6.
- Mazuelas, S.; Lago, F.A.; Fernandez, P.; Bahillo, A.; Blas, J.; Lorenzo, R.M.; Abril, E.J. Ranking of TOA measurements based on the estimate of the NLOS propagation contribution in a wireless location system. Wirel. Personal Commun. 2010, 53, 35–52. [Google Scholar] [CrossRef]
- Moravek, P.; Komosny, D.; Simek, M.; Girbau, D.; Lzazro, A. Energy analysis of received signal strength localization in wireless sensor networks. Radio Eng. 2011, 20, 937–945. [Google Scholar]
- Oguz-Ekim, P.; Gomes, J.P.; Xavier, J.; Oliveira, P. Robust localization of nodes and time-recursive tracking in sensor networks using noisy range measurements. IEEE Trans. Signal Process. 2011, 59, 3930–3942. [Google Scholar] [CrossRef]
- Xiao, W.; Wu, J.K.; Xie, L. Adaptive sensor scheduling for target tracking in wireless sensor network. In Proceedings of the Advanced Signal Processing Algorithms, Architectures, and Implementations XV, San Diego, CA, USA, 31 July 2005; pp. 59100B-1–59100B-9.
- Mauris, G.; Lasserre, V.; Foulloy, L. Fuzzy modeling of measurement data acquired from physical sensors. IEEE Trans. Instrum. Meas. 2000, 49, 1201–1205. [Google Scholar] [CrossRef]
- Wang, X.; Fu, M.; Zhang, H. Target tracking in wireless sensor networks based on the combination of KF and MLE using distance measurements. IEEE Trans. Mob. Comput. 2012, 11, 567–576. [Google Scholar] [CrossRef]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS) using AOA. In Proceedings of the Twenty-Second Annual Joint Conference of the IEEE Computer and Communications, San Francisco, CA, USA, 30 March–3 April 2003; pp. 1734–1743.
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, Y.; Gao, R.; Zhao, H. Energy Efficient Moving Target Tracking in Wireless Sensor Networks. Sensors 2016, 16, 29. https://doi.org/10.3390/s16010029
Wen Y, Gao R, Zhao H. Energy Efficient Moving Target Tracking in Wireless Sensor Networks. Sensors. 2016; 16(1):29. https://doi.org/10.3390/s16010029
Chicago/Turabian StyleWen, Yingyou, Rui Gao, and Hong Zhao. 2016. "Energy Efficient Moving Target Tracking in Wireless Sensor Networks" Sensors 16, no. 1: 29. https://doi.org/10.3390/s16010029
APA StyleWen, Y., Gao, R., & Zhao, H. (2016). Energy Efficient Moving Target Tracking in Wireless Sensor Networks. Sensors, 16(1), 29. https://doi.org/10.3390/s16010029