
Novel X-ray Communication Based XNAV Augmentation Method Using X-ray Detectors

Abstract
:1. Introduction
2. Experimental Section
2.1. Coordinate Systems
2.2. Orbit Dynamics
2.3. Measurement Models
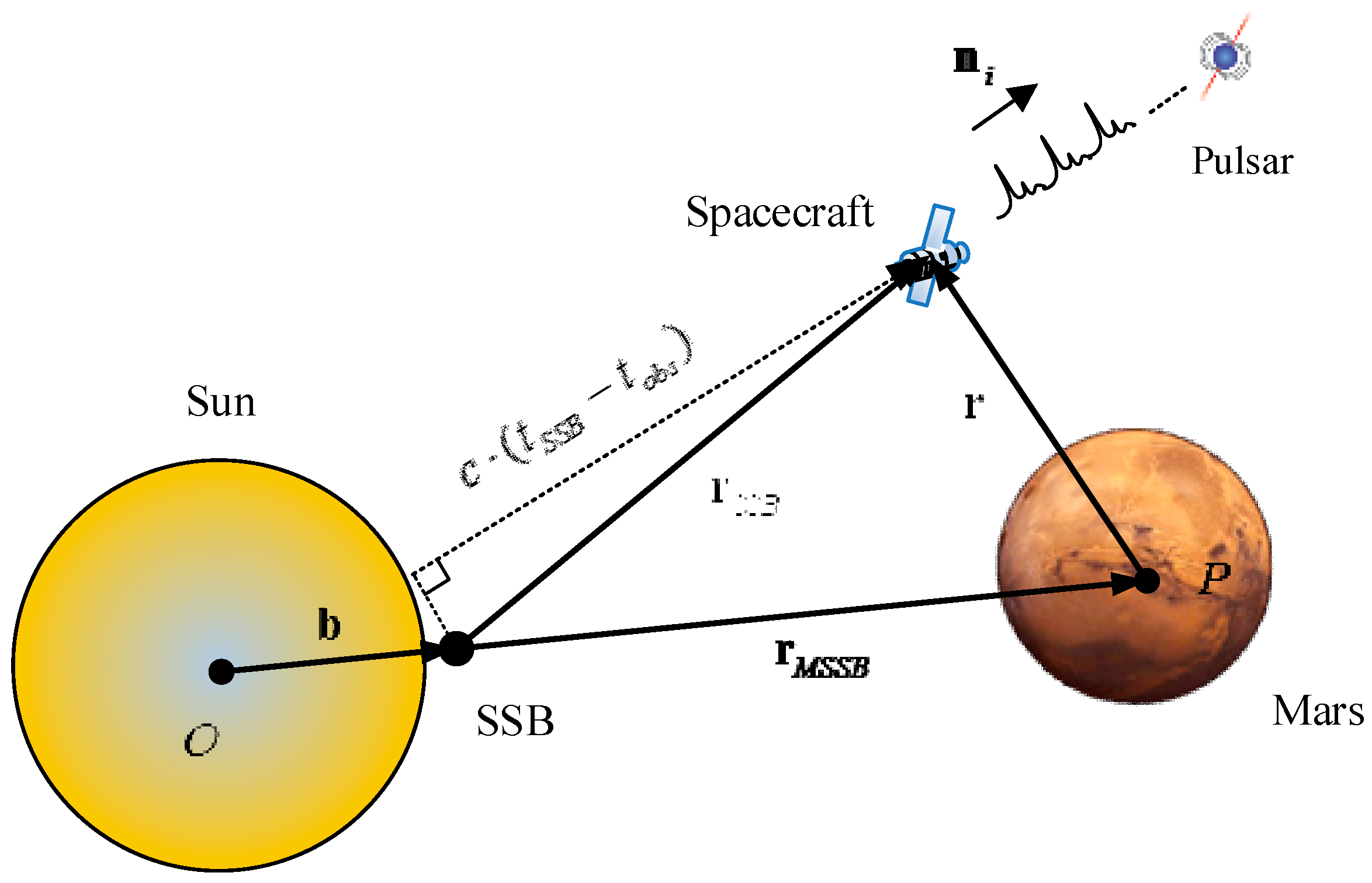
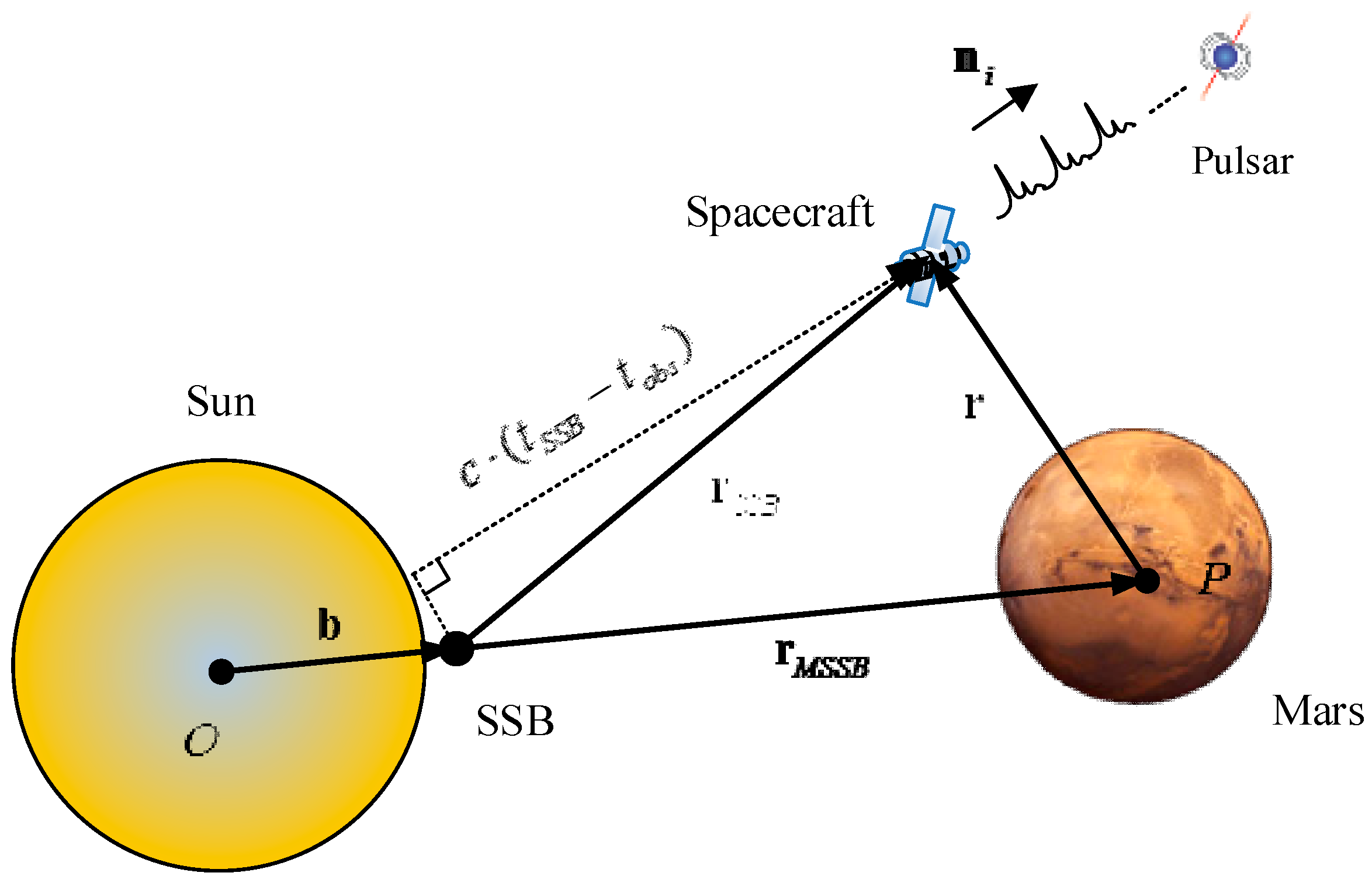
2.3.1. Pulsar Timing Observation
2.3.2. Range Observation Based on XCOM
- (1)
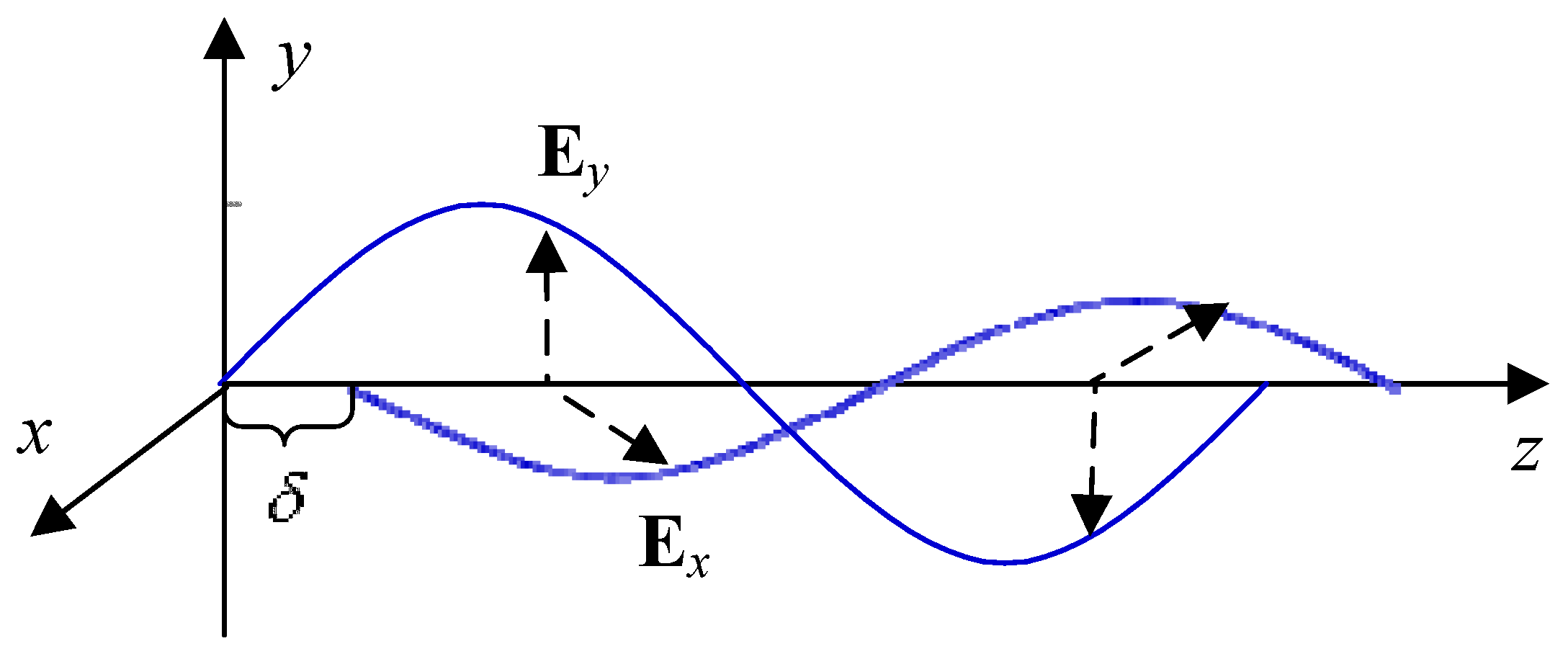
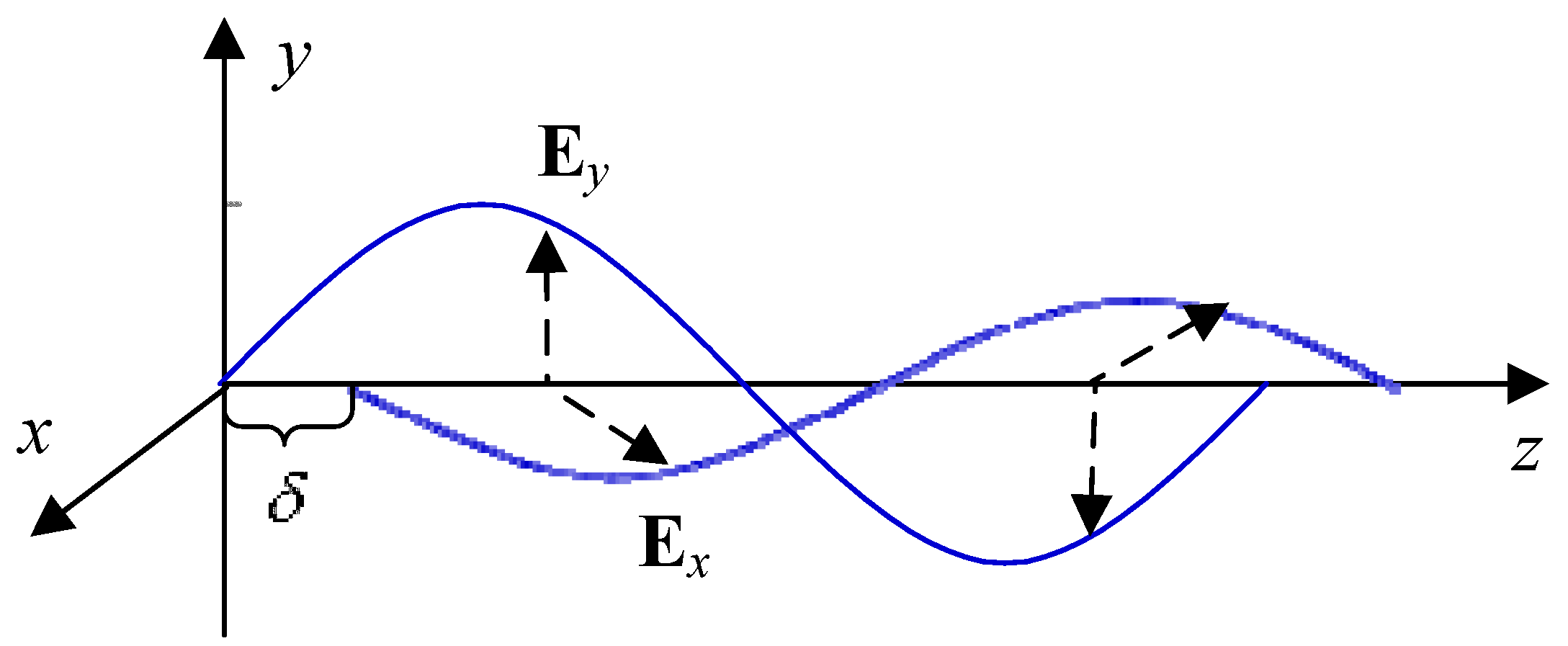
- At the emitter, modulate the X-ray signal with the binary ranging code using the circular polarization modulation and send the modulated X-ray signal to the receiver.
- (2)
- Through the propagation in space channel, the X-ray ranging signal is received by the receiver and the signal is demodulated to recover the binary ranging sequence.
- (3)
- Regenerate the downlink signal based on the recovered uplink signal and modulate the regenerated signal with the circular polarization modulation. Then, the downlink signal is sent back to the emitter.
- (4)
- Receive the downlink signal at the emitter and demodulate the signal. Correlate the received signal with the local ranging sequence to obtain the two-way time delay. The two-way range can be calculated based on the elapsed time.
2.4. Kalman Filtering Algorithm for State Estimation
3. Results and Discussion
3.1. Simulation Conditions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pulsars | Period/(s) | Right Ascension/(Rad) | Declination/(Rad) | Flux Intensity/(ph/cm2·s) | Pulse Width/(s) | Pulsed Fraction/(%) |
|---|---|---|---|---|---|---|
| B1937 + 21 | 1.558e − 3 | 5.1472 | 0.3767 | 4.99e − 5 | 3.82e − 5 | 86 |
| B1821 − 24 | 3.050e − 3 | 4.8194 | −0.4341 | 1.93e − 4 | 5.50e − 5 | 98 |
| B0531 + 21 | 3.339e − 2 | 1.45967 | 0.384688 | 1.54 | 3.0e − 3 | 70 |
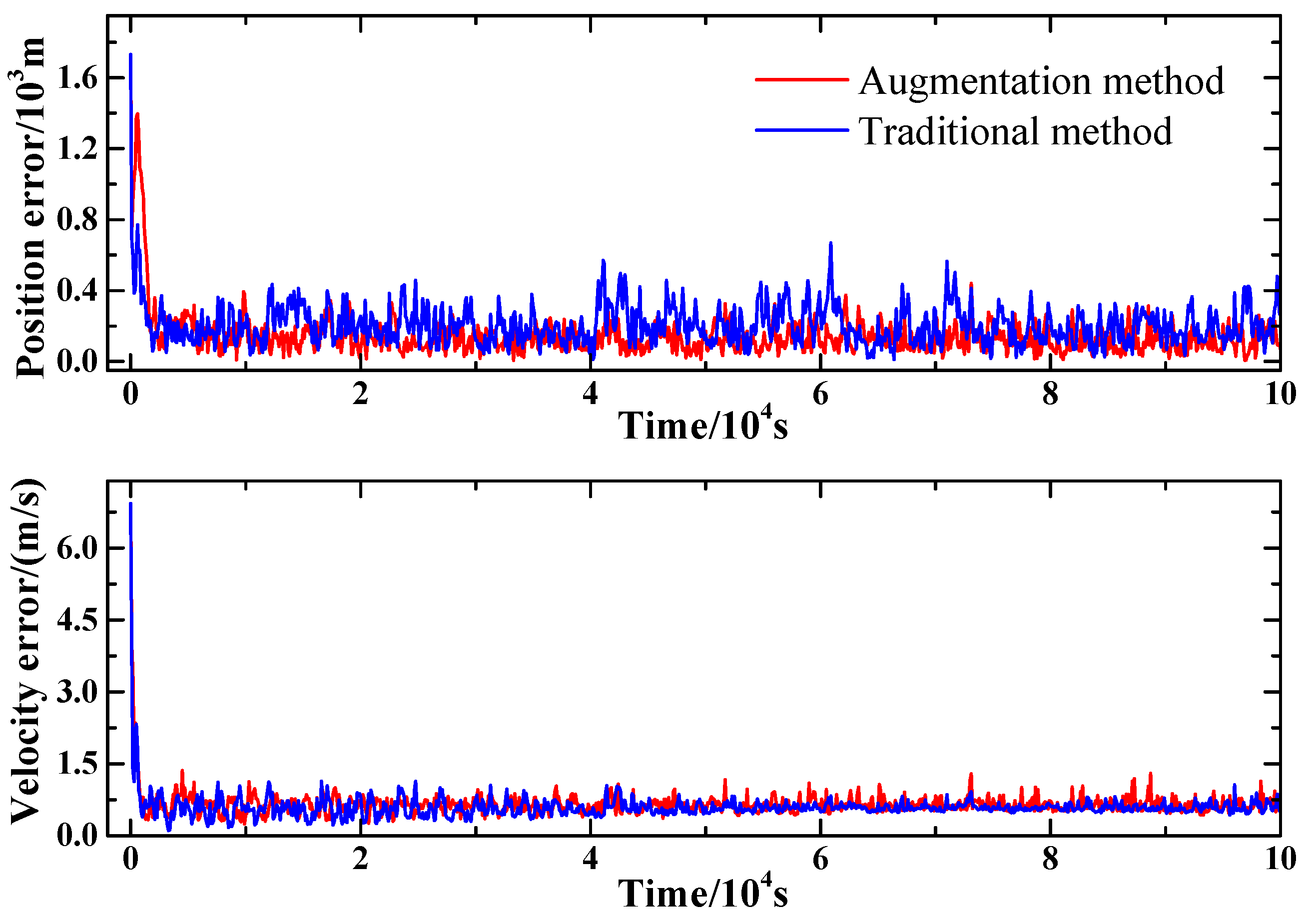
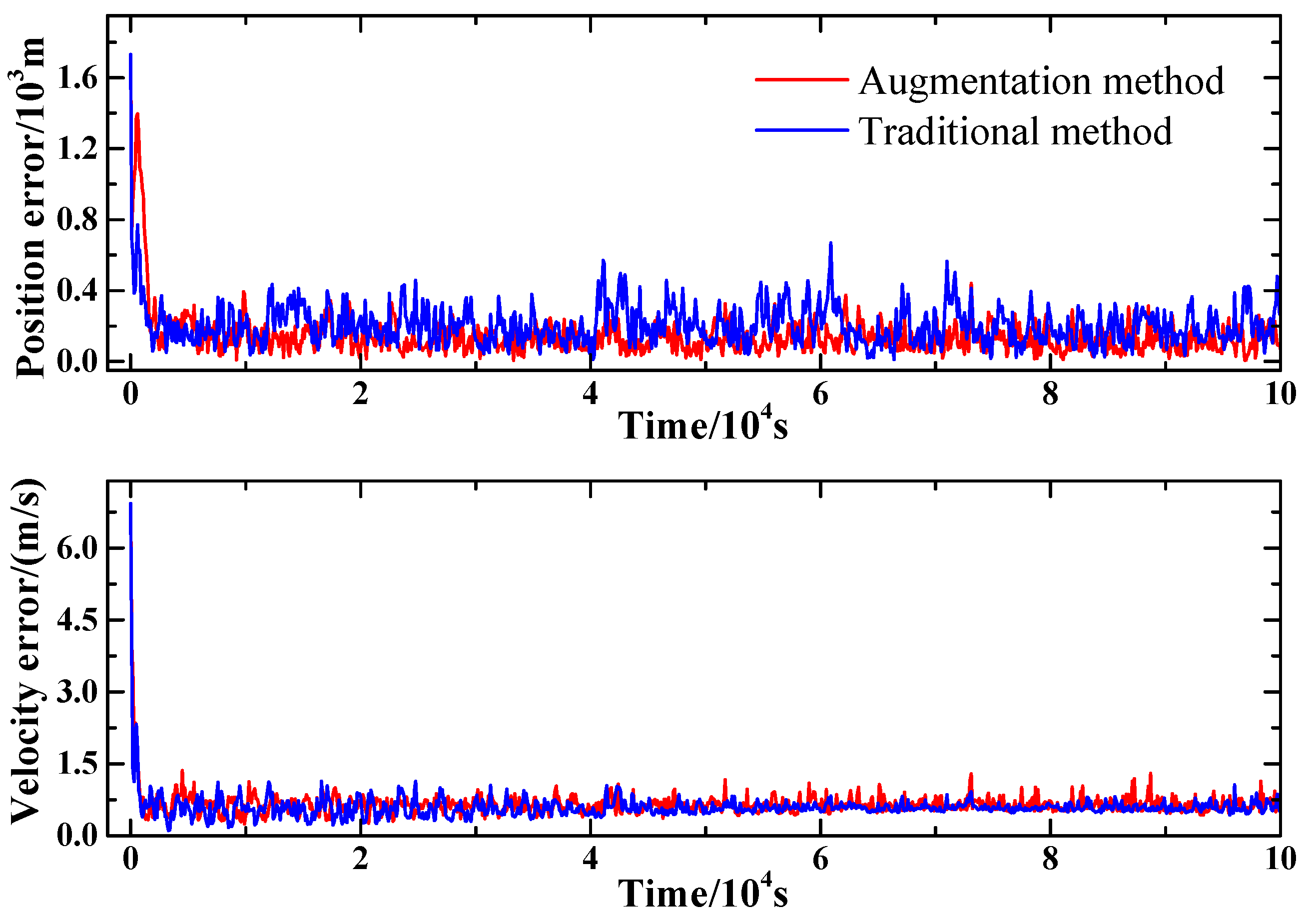
3.2. State Estimation Based on Kalman Filtering

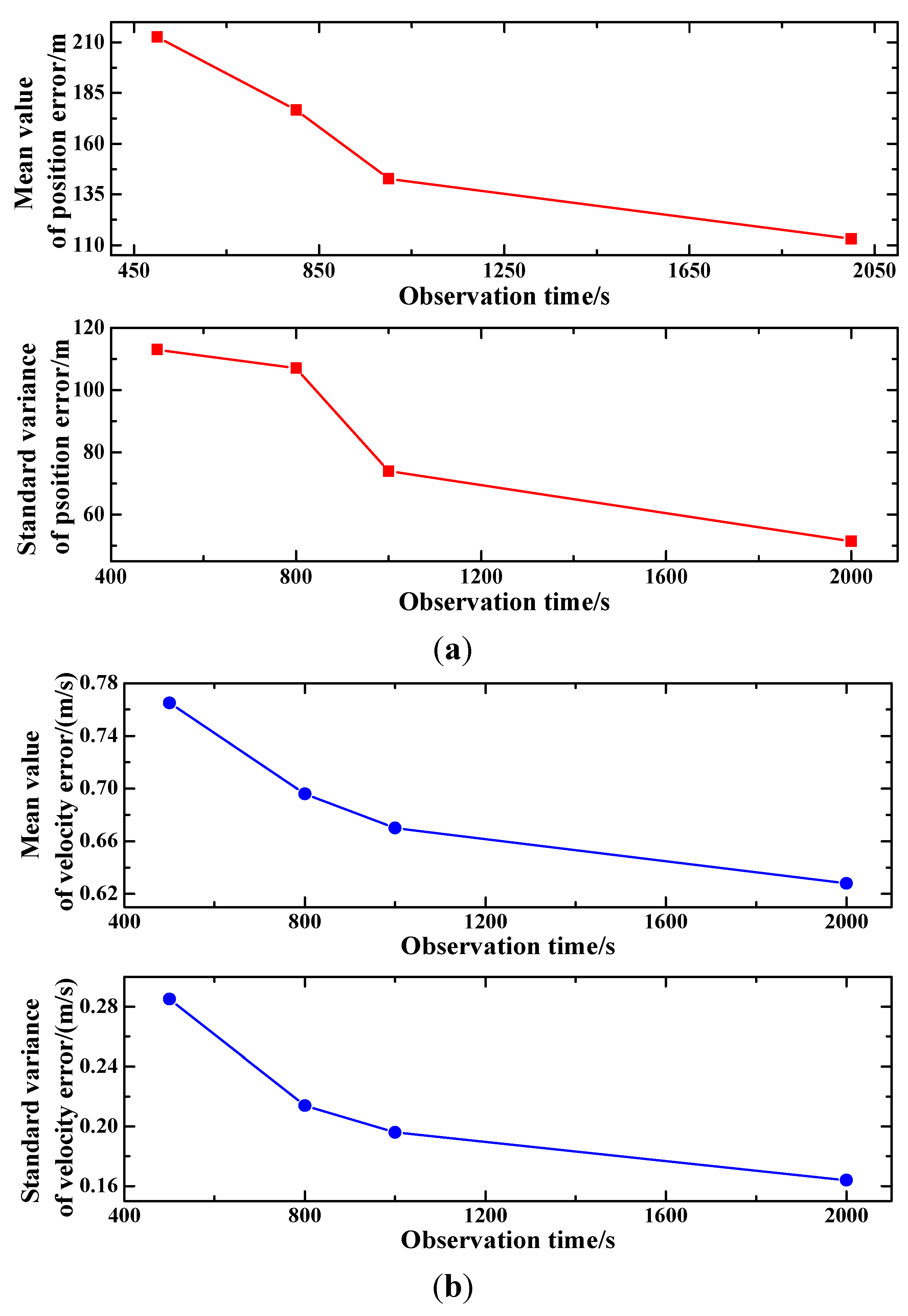
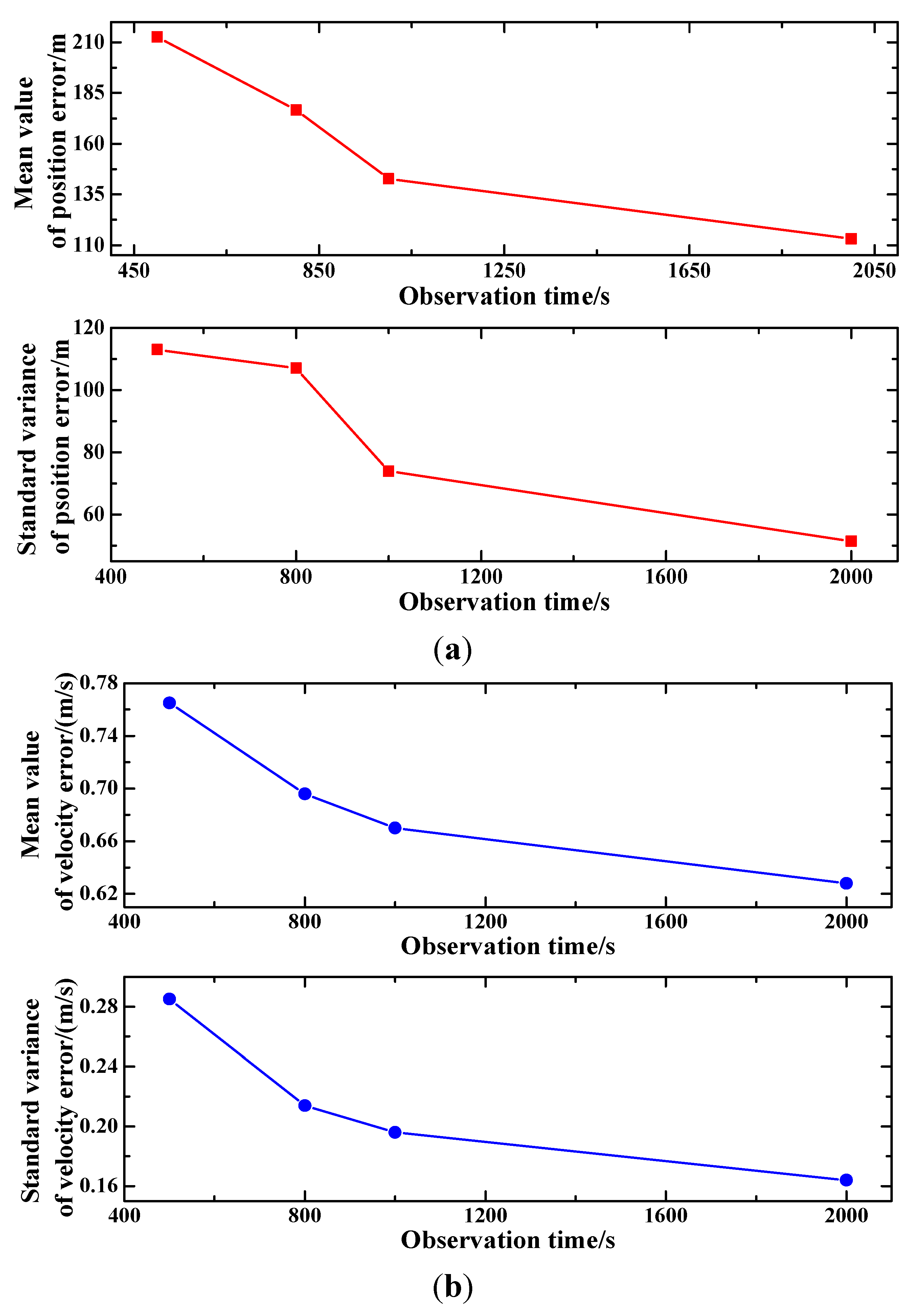
3.3. Impact of Pulsar Observation Interval on Filtering
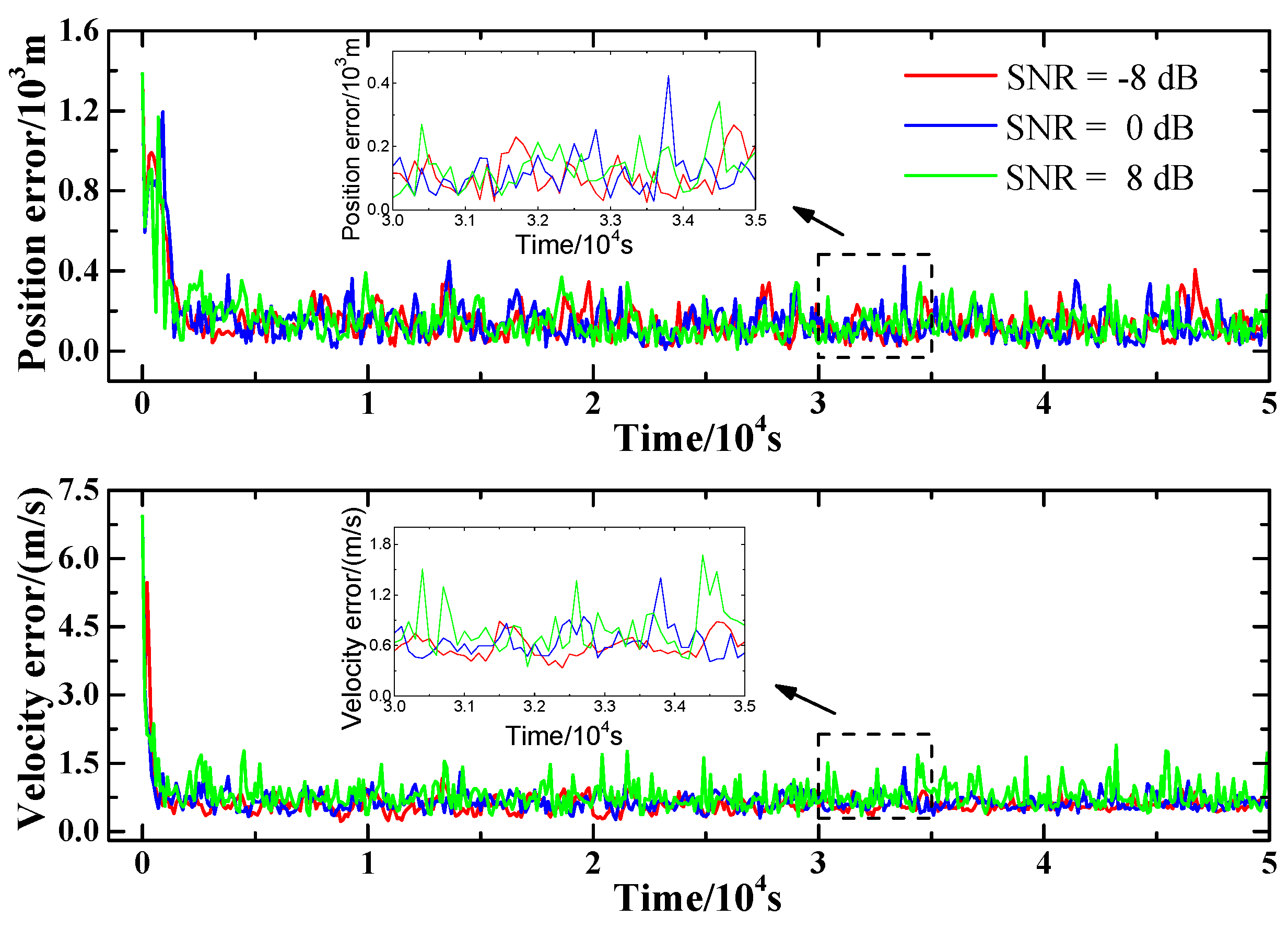
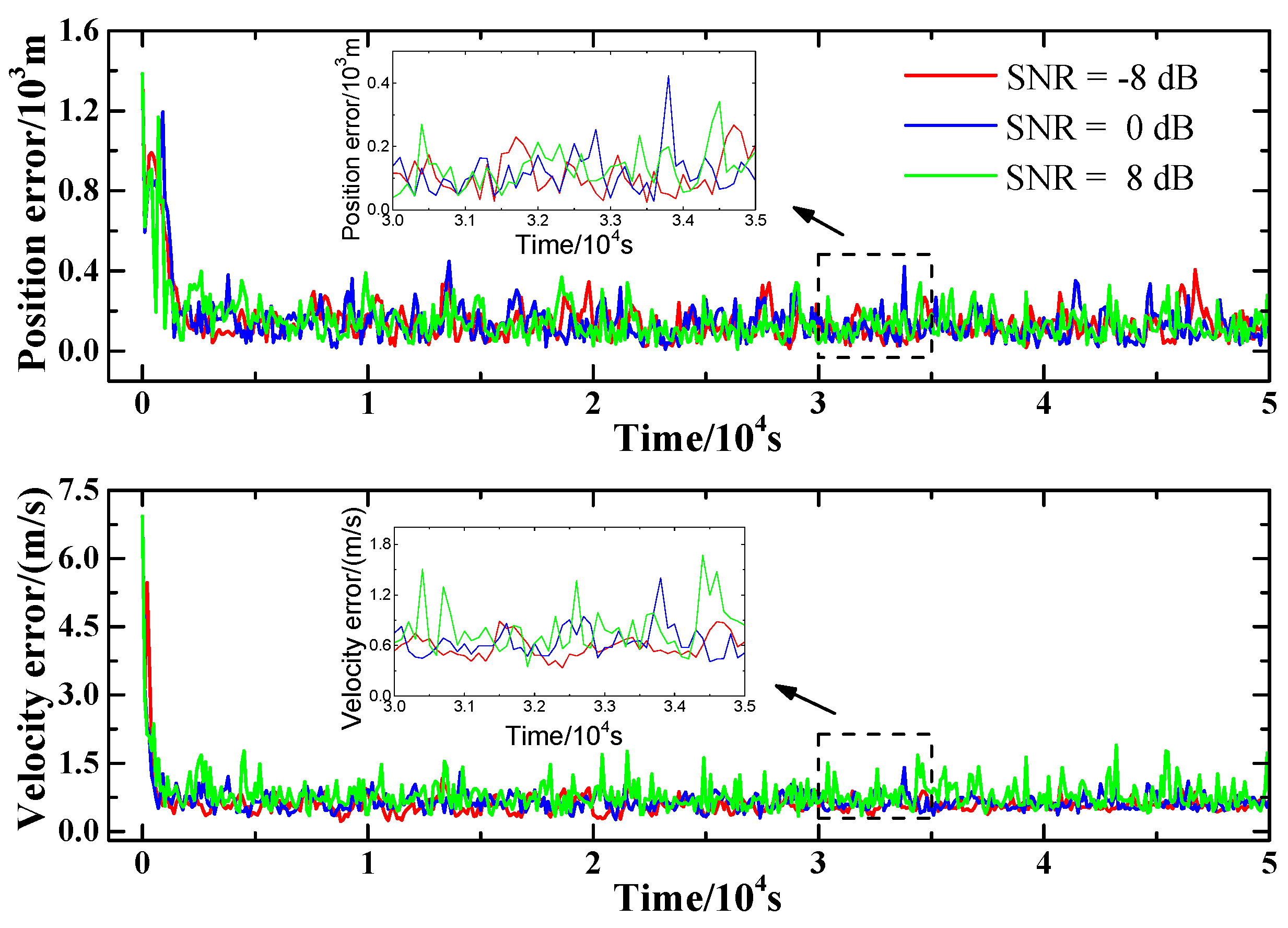
3.4. SNR of Ranging Signal on Filtering
3.5. Filtering Algorithm on Different Orbits

4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shannon, R.M.; Oslowski, S.; Dai, S.; Bailes, M.; Hobbs, G.; Manchester, R.N.; van Straten, W.; Raithel, C.A.; Ravi, V.; Toomey, L.; et al. Limitations in timing precision due to single-pulse shape variability in millisecond pulsars. Mon. Not. R. Astron. Soc. 2014, 443, 1463–1481. [Google Scholar] [CrossRef]
- Liu, K.; Desvignes, G.; Cognard, I.; Stappers, B.W.; Verbiest, J.P.W.; Lee, K.J.; Champion, D.J.; Kramer, M.; Freire, P.C.C.; Karuppusamy, R. Measuring pulse times of arrival from broad-band pulsar observations. Mon. Not. R. Astron. Soc. 2014, 443, 3752–3760. [Google Scholar] [CrossRef]
- Taylor, J.H. Pulsar timing and relativistic gravity. Philos. Trans. R. Soc. Lond. Ser. A: Phys. Eng. Sci. 1992, 341, 117–134. [Google Scholar] [CrossRef]
- Huang, Z.; Li, M.; Shuai, P. On time transfer in X-ray pulsar navigation. Sci. China Ser. E: Technol. Sci. 2009, 52, 1413–1419. [Google Scholar] [CrossRef]
- Li, J.; Ke, X. Study on autonomous navigation based on pulsar timing model. Sci. China Ser. G-Phys. Mech. Astron. 2009, 52, 303–309. [Google Scholar] [CrossRef]
- Sheikh, S.I.; Pines, D.J.; Ray, P.S.; Wood, K.S.; Lovellette, M.N.; Wolff, M.T. Spacecraft navigation using X-ray pulsars. J. Guid. Control Dyn. 2006, 29, 49–63. [Google Scholar] [CrossRef]
- Sheikh, S.I. The use of variable celestial X-ray sources for spacecraft navigation. Ph.D. Thesis, University of Maryland, College Park, Ann Arbor, MI, USA, 2005. [Google Scholar]
- Li, Q.; Jianye, L.; Guanglou, Z.; Zhi, X. Development of xnav algorithm and cycle ambiguity resolution. Yuhang Xuebao/J. Astronaut. 2009, 30, 1460–1465. [Google Scholar]
- Zhang, H.; Xu, L.; Xie, Q. A search algorithm of phase ambiguity resolution for xpnav based on binary tree. Geomat. Inf. Sci. Wuhan Univ. 2011, 36, 39–43. [Google Scholar]
- Emadzadeh, A.A.; Speyer, J.L. Relative navigation between two spacecraft using X-ray pulsars. IEEE Trans. Control Syst. Technol. 2011, 19, 1021–1035. [Google Scholar] [CrossRef]
- Ning, X.; Fang, J. An autonomous celestial navigation method for leo satellite based on unscented kalman filter and information fusion. Aerosp. Sci. Technol. 2007, 11, 222–228. [Google Scholar] [CrossRef]
- Su, Z.; Xu, L.; Zhang, H.; Xie, Q. Fault-tolerant integrated navigation system based on xpnav and sins. J. Huazhong Univ. Sci. Technol. 2011, 39, 19–23. [Google Scholar]
- Yang, C.-W.; Zheng, J.-H.; Li, M.-T. Integrated navigation based on pulsar and sun sensor in sun-earth halo orbit. Trans. Beijing Inst. Technol. 2013, 33, 612–616. [Google Scholar]
- Yang, C.; Zheng, J.; Gao, D. Fault tolerant ukf application in pulsar-based integrated navigation. J. Chin. Inert. Technol. 2014, 22, 759–762. [Google Scholar]
- Qiao, L.; Liu, J.; Zheng, G.; Xiong, Z. Augmentation of xnav system to an ultraviolet sensor-based satellite navigation system. IEEE J. Sel. Top. Signal Process. 2009, 3, 777–785. [Google Scholar] [CrossRef]
- Liu, J.; Fang, J.; Ning, X.; Wu, J.; Kang, Z. Autonomous navigation for deep space explorer based on pulsar and mars observation. Chin. J. Sci. Instrum. 2014, 35, 247–252. [Google Scholar]
- Yang, C.; Zheng, J. Integrated navigation based on X-ray pulsars and asteroids during interplanetary cruise. J. Chin. Inert. Technol. 2012, 20, 583–586. [Google Scholar]
- NASA. NASA Space Technology Roadmaps and Priorities: Restoring NASA’s Technological Edge and Paving the Way for a New Era in Space; The National Academies Press: Washington, DC, USA, 2012; p. 376. [Google Scholar]
- Grieken, R.V.; Markowicz, A. Handbook of X-ray Spectrometry, 2nd ed.; CRC Press: New York, NY, USA, 2001. [Google Scholar]
- Song, S.; Xu, L.; Zhang, H.; Gao, N.; Shen, Y. A novel X-ray circularly polarized ranging method. Chin. Phys. B 2015, 24, 057201. [Google Scholar] [CrossRef]
- Song, S.; Xu, L.; Zhang, H.; Gao, N. X-ray communication based simultaneous communication and ranging. Chin. Phys. B 2015, 24, 094215. [Google Scholar] [CrossRef]
- Seidelmann, P.K. Explanatory Supplement to the Astronomical Almanac; University Science Books: Washington, DC, USA, 1992. [Google Scholar]
- Roncoli, R.; Mase, R. Update to Mars Coordinate Frame Definitions; Jet Propulsion Laboratory: Pasadena, CA, USA, 2006. [Google Scholar]
- Montenbruck, O.; Gill, E. Satellite Orbits: Models, Methods and Applications; Springer: Webling, Germany, 2012. [Google Scholar]
- Lemoine, F.G.; Smith, D.E.; Rowlands, D.D.; Zuber, M.T.; Neumann, G.A.; Chinn, D.S.; Pavlis, D.E. An improved solution of the gravity field of mars (gmm-2b) from mars global surveyor. J. Geophys. Res. Planets 2001, 106, 23359–23376. [Google Scholar] [CrossRef]
- Backer, D.C. Pulsars—The new celestial clocks. In Galactic High-Energy Astrophysics High-Accuracy Timing and Positional Astronomy; Springer: Graz, Austria, 1993; pp. 193–253. [Google Scholar]
- Emadzadeh, A.A.; Speyer, J.L. On modeling and pulse phase estimation of X-ray pulsars. IEEE Trans. Signal Process. 2010, 58, 4484–4495. [Google Scholar] [CrossRef]
- Rinauro, S.; Colonnese, S.; Scarano, G. Fast near-maximum likelihood phase estimation of X-ray pulsars. Signal Process. 2013, 93, 326–331. [Google Scholar] [CrossRef]
- Zhao, B.; Wu, C.; Sheng, L.; Liu, Y. Next Generation of Space Wireless Communication Technology Based on X-ray. Acta Photonica Sin. 2013, 42, 801–804. [Google Scholar] [CrossRef]
- Malgrange, C.; Varga, L.; Giles, C.; Rogalev, A.; Goulon, J. Phase plates for X-ray optics. In X-ray Optics Design, Performance, and Applications; SPIE-International Society for Optical Engine: Denver, CO, USA, 1999; pp. 326–339. [Google Scholar]
- Yahnke, C.J.; Srajer, G.; Haeffner, D.R.; Mills, D.M.; Assoufid, L. Germanium X-ray phase plates for the production of circularly polarized X-rays. Nuclear Instrum. Methods Phys. Res. Section A Accel. Spectrom. Detect. Assoc. Equip. 1994, 347, 128–133. [Google Scholar] [CrossRef]
- Black, J.K.; Baker, R.G.; Deines-Jones, P.; Hill, J.E.; Jahoda, K. X-ray polarimetry with a micropattern tpc. Nuclear Instrum. Methods Phys. Res. Section A Accel. Spectrom. Detect. Assoc. Equip. 2007, 581, 755–760. [Google Scholar] [CrossRef]
- Schaefers, F. Multilayer-based soft X-ray polarimetry. Opt. Precis. Eng. 2007, 15, 1850–1861. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, S.; Xu, L.; Zhang, H.; Bai, Y. Novel X-ray Communication Based XNAV Augmentation Method Using X-ray Detectors. Sensors 2015, 15, 22325-22342. https://doi.org/10.3390/s150922325
Song S, Xu L, Zhang H, Bai Y. Novel X-ray Communication Based XNAV Augmentation Method Using X-ray Detectors. Sensors. 2015; 15(9):22325-22342. https://doi.org/10.3390/s150922325
Chicago/Turabian StyleSong, Shibin, Luping Xu, Hua Zhang, and Yuanjie Bai. 2015. "Novel X-ray Communication Based XNAV Augmentation Method Using X-ray Detectors" Sensors 15, no. 9: 22325-22342. https://doi.org/10.3390/s150922325
APA StyleSong, S., Xu, L., Zhang, H., & Bai, Y. (2015). Novel X-ray Communication Based XNAV Augmentation Method Using X-ray Detectors. Sensors, 15(9), 22325-22342. https://doi.org/10.3390/s150922325