
A Probabilistic Feature Map-Based Localization System Using a Monocular Camera



Abstract
:1. Introduction
2. Generation of Probabilistic Feature Map
2.1. Definition of Probabilistic Feature Map
2.2. Probabilistic Representation of Features
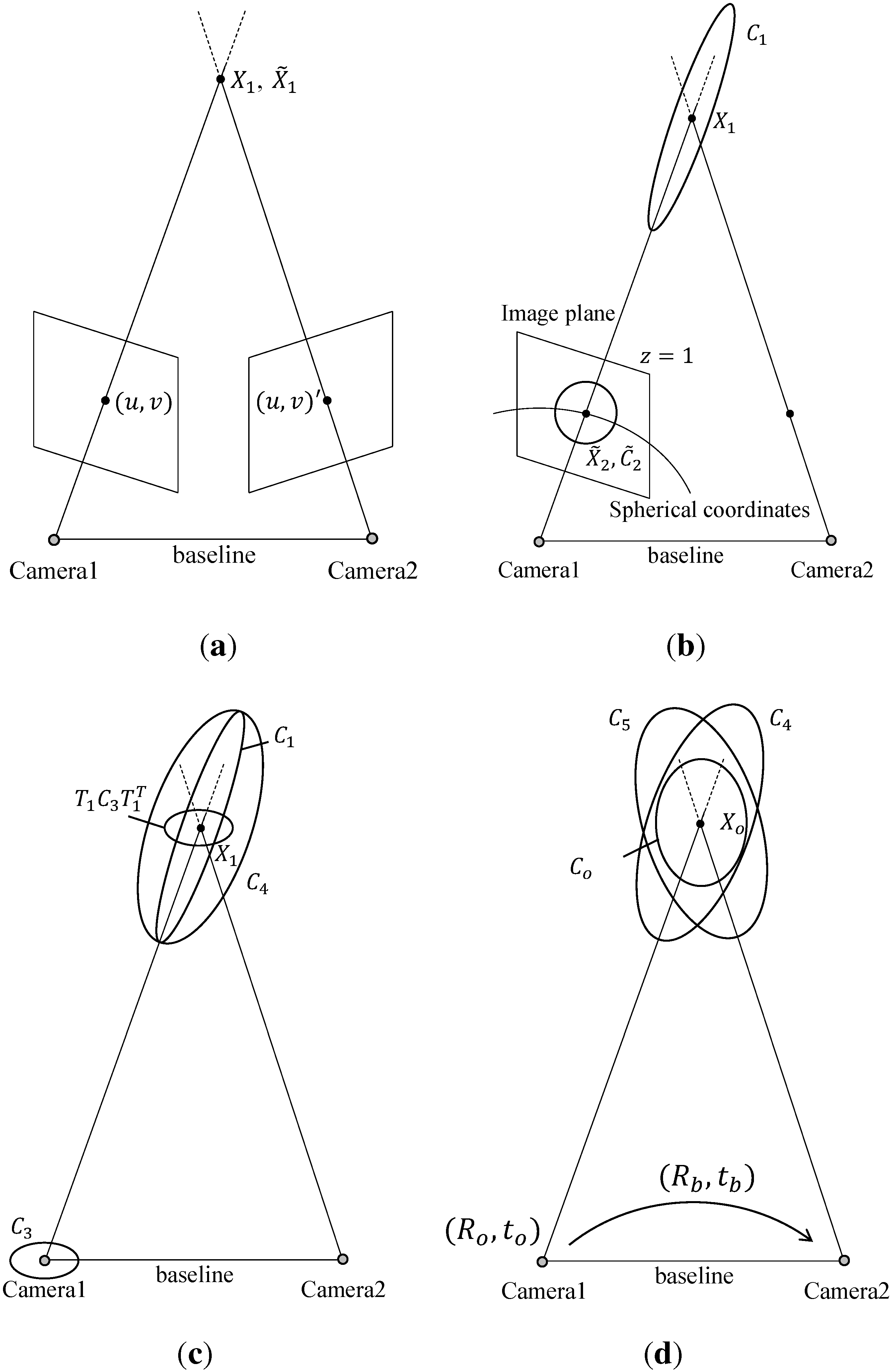
2.3. Constructing a Probabilistic Feature Map
3. Localization Method Using Probabilistic Feature Map
3.1. Generation of Matching Correspondences
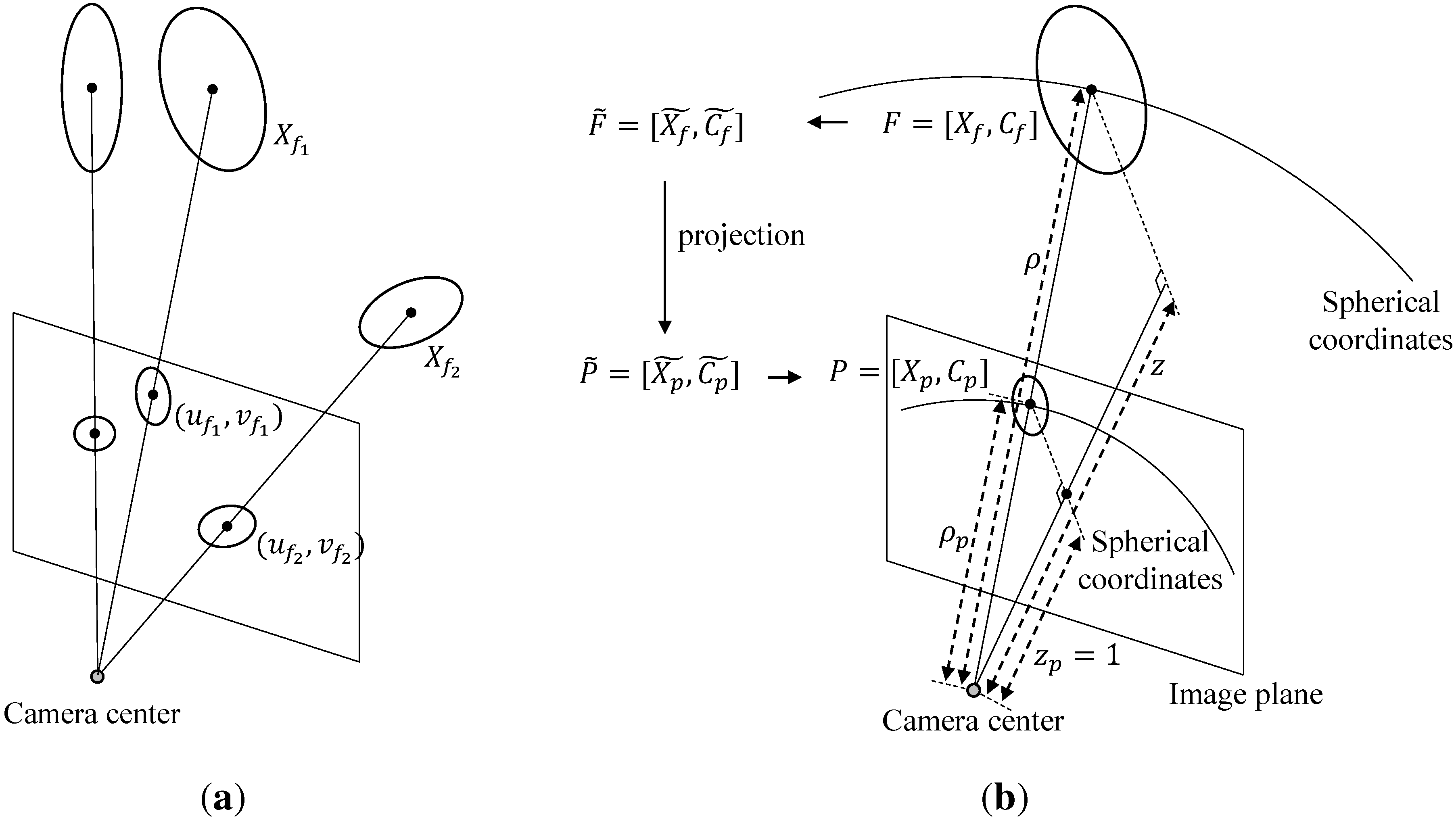
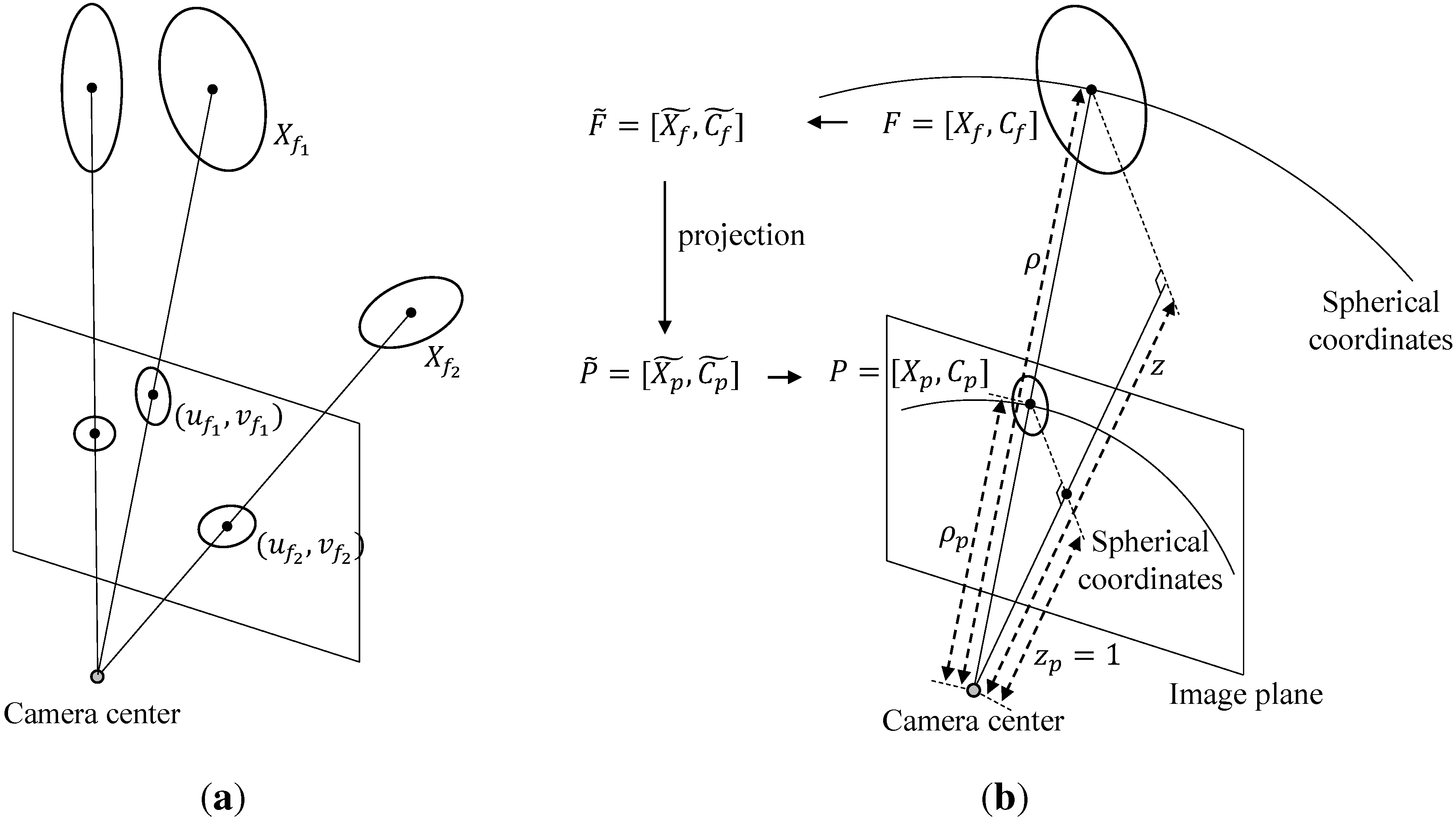
3.2. Projection of Probabilistic Feature onto Image Plane
3.3. Estimating Camera Pose Based on Probabilistic Map
4. Simulation and Experiments
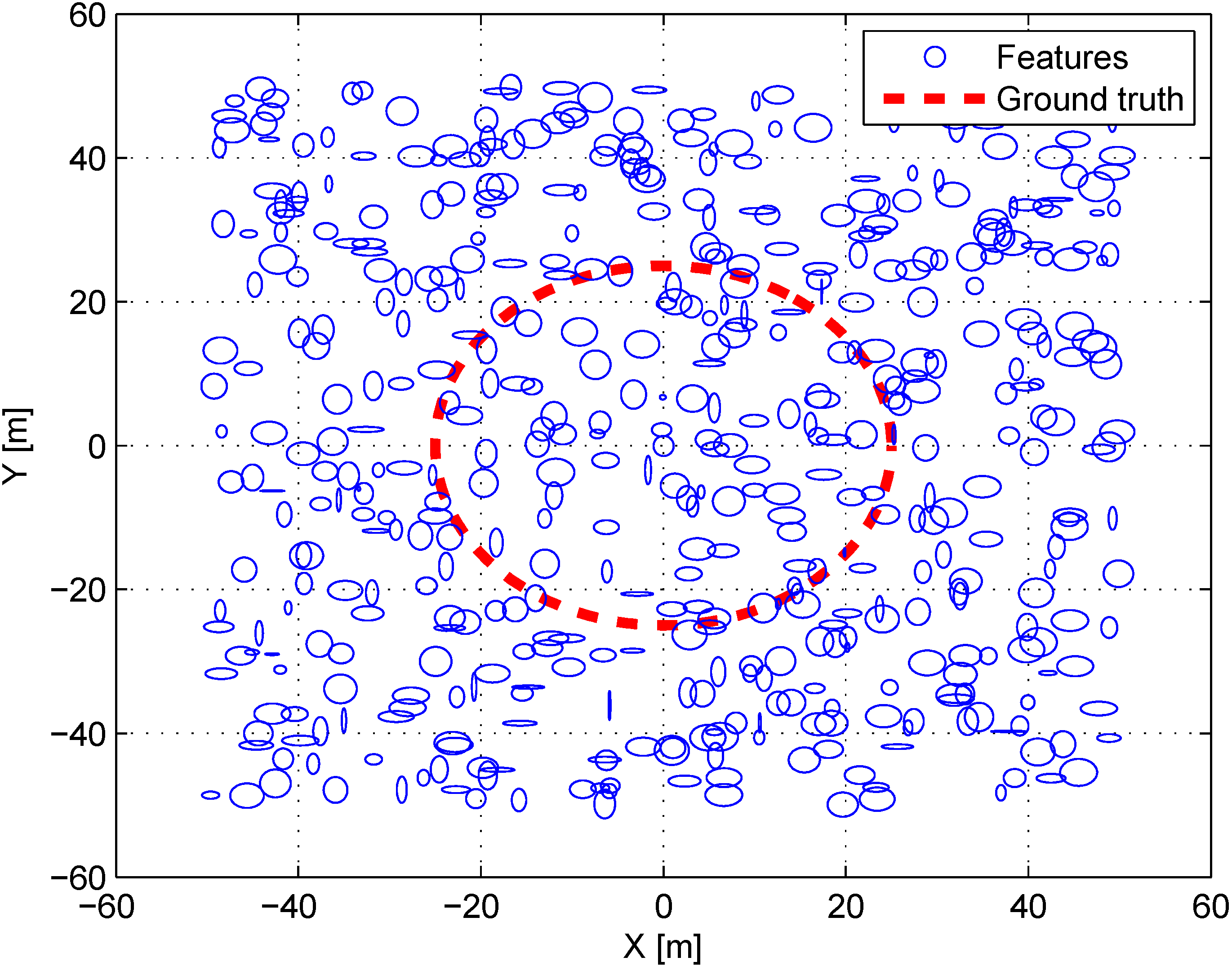
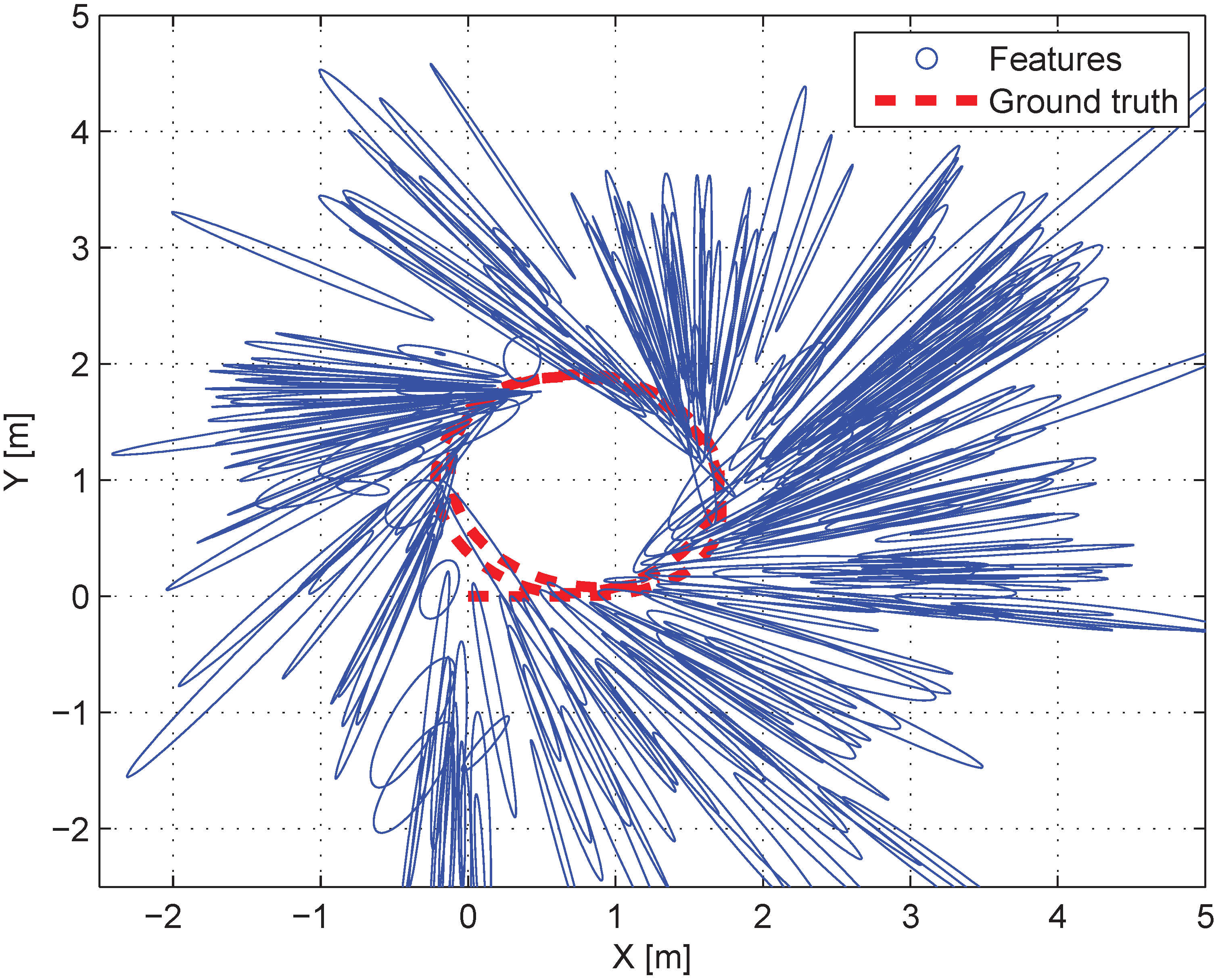
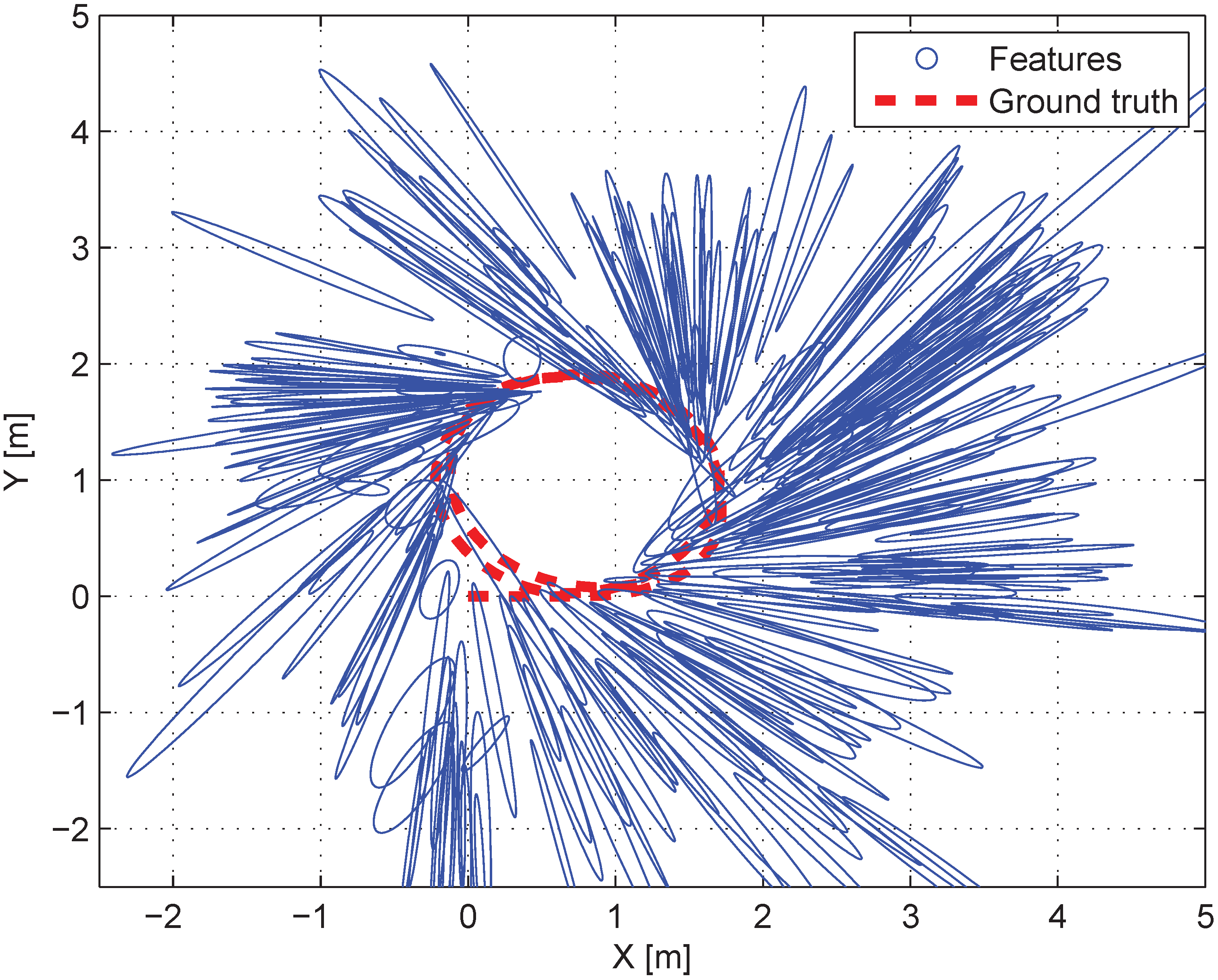
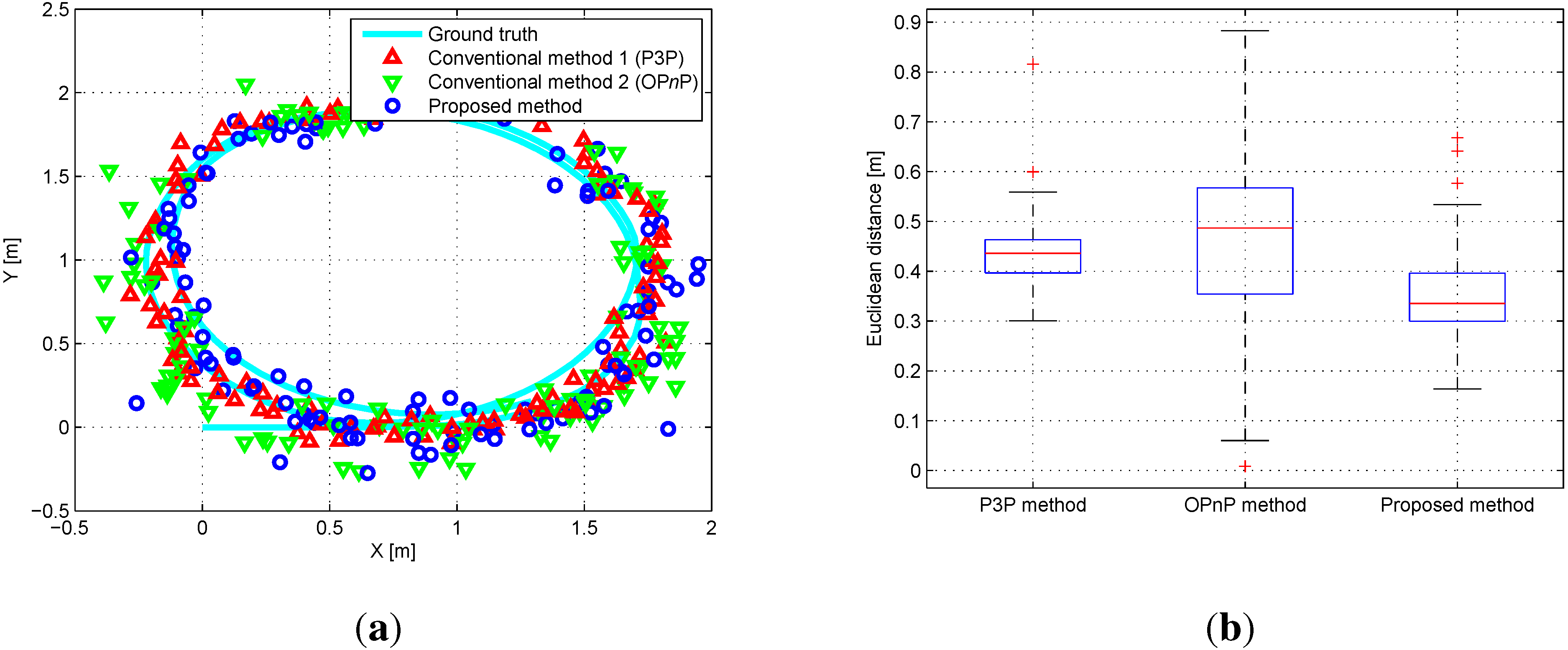
4.1. Simulation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P3P Algorithm | OPnP Algorithm | Proposed Algorithm | ||||
|---|---|---|---|---|---|---|
| Mean | Stdev | Mean | Stdev | Mean | Stdev | |
| x | 0.634 | 0.353 | 0.486 | 0.132 | 0.292 | 0.085 |
| y | 0.714 | 0.351 | 0.665 | 0.307 | 0.279 | 0.076 |
| z | 0.801 | 0.444 | 0.663 | 0.245 | 0.706 | 0.368 |
| 1.368 | 1.795 | 0.981 | 0.705 | 1.227 | 1.569 | |
| 1.527 | 2.141 | 1.292 | 1.493 | 1.273 | 0.658 | |
| 1.070 | 0.934 | 1.188 | 0.774 | 0.493 | 0.257 | |
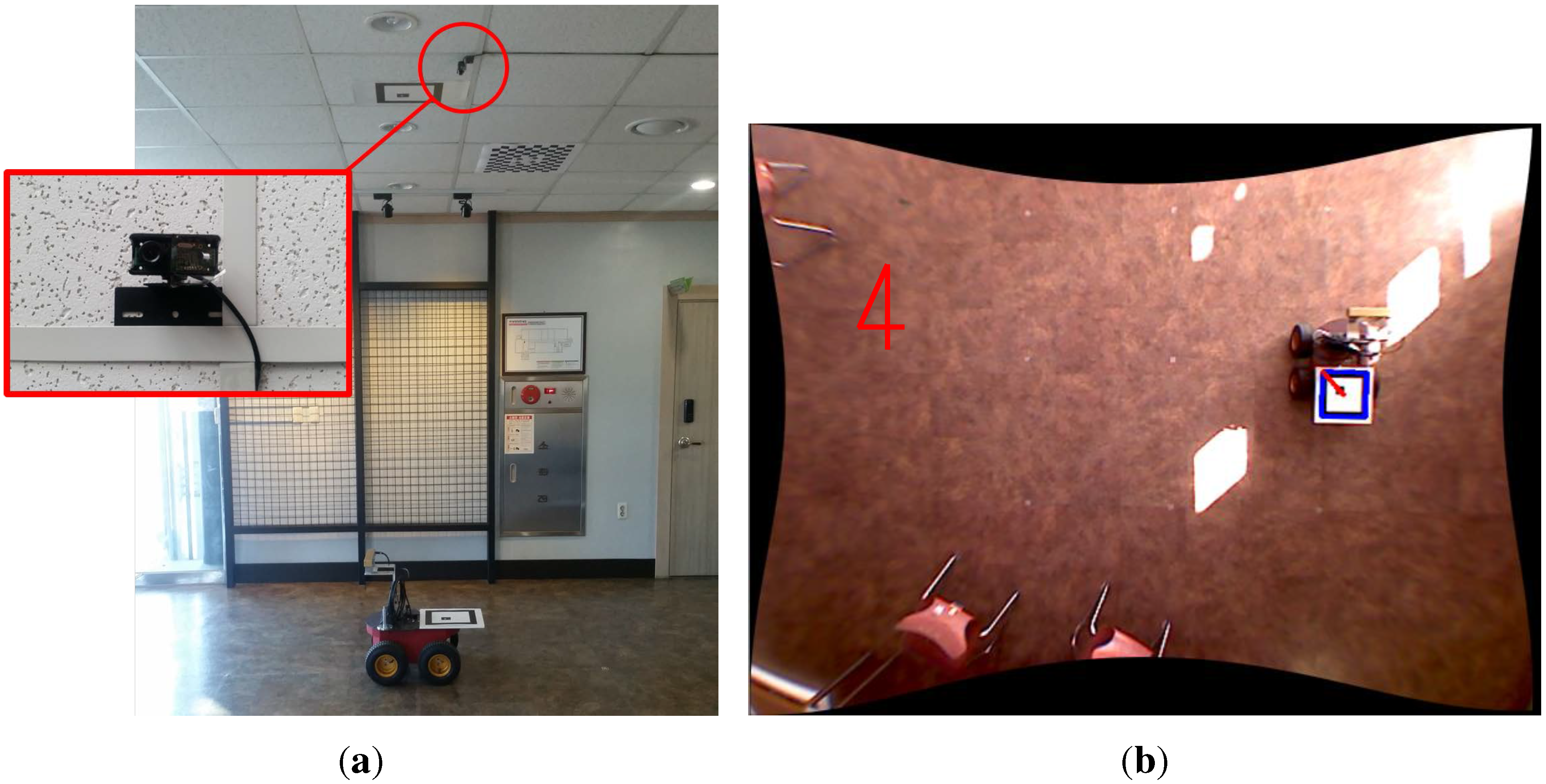
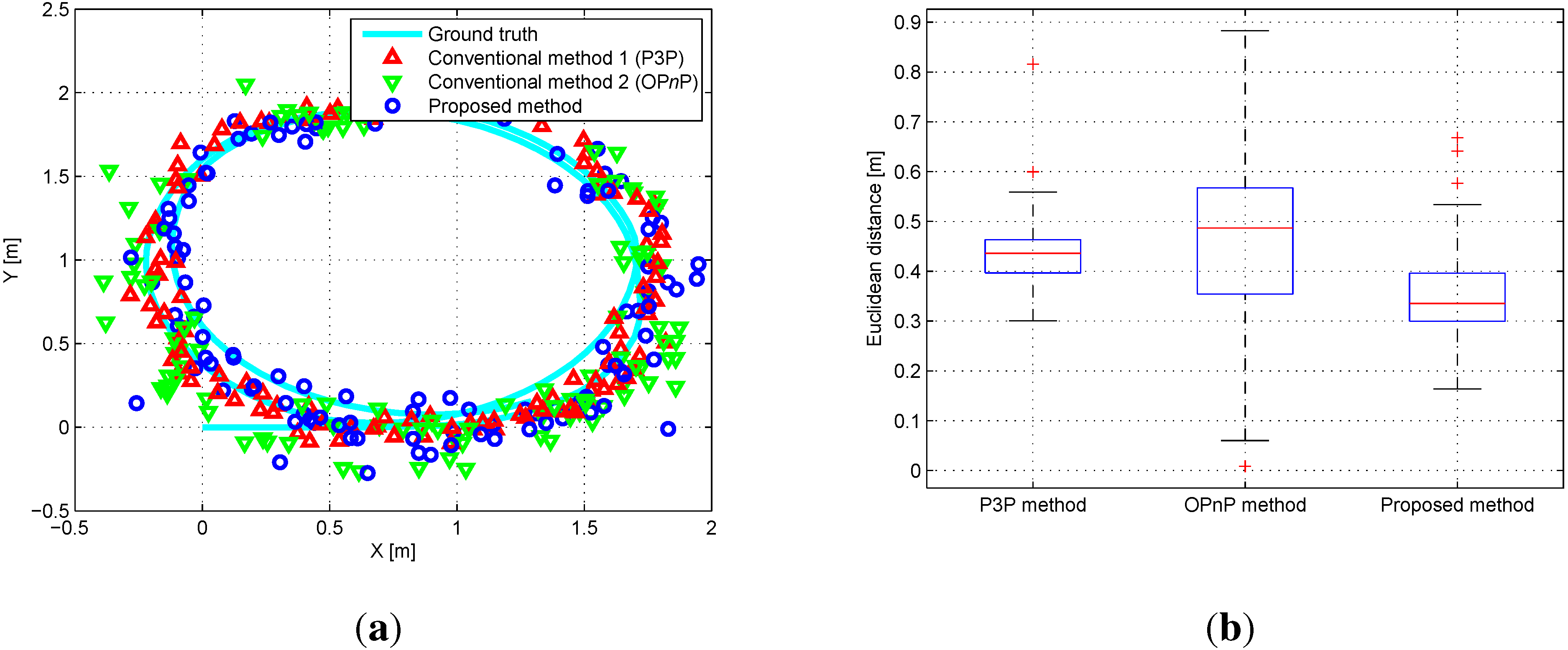
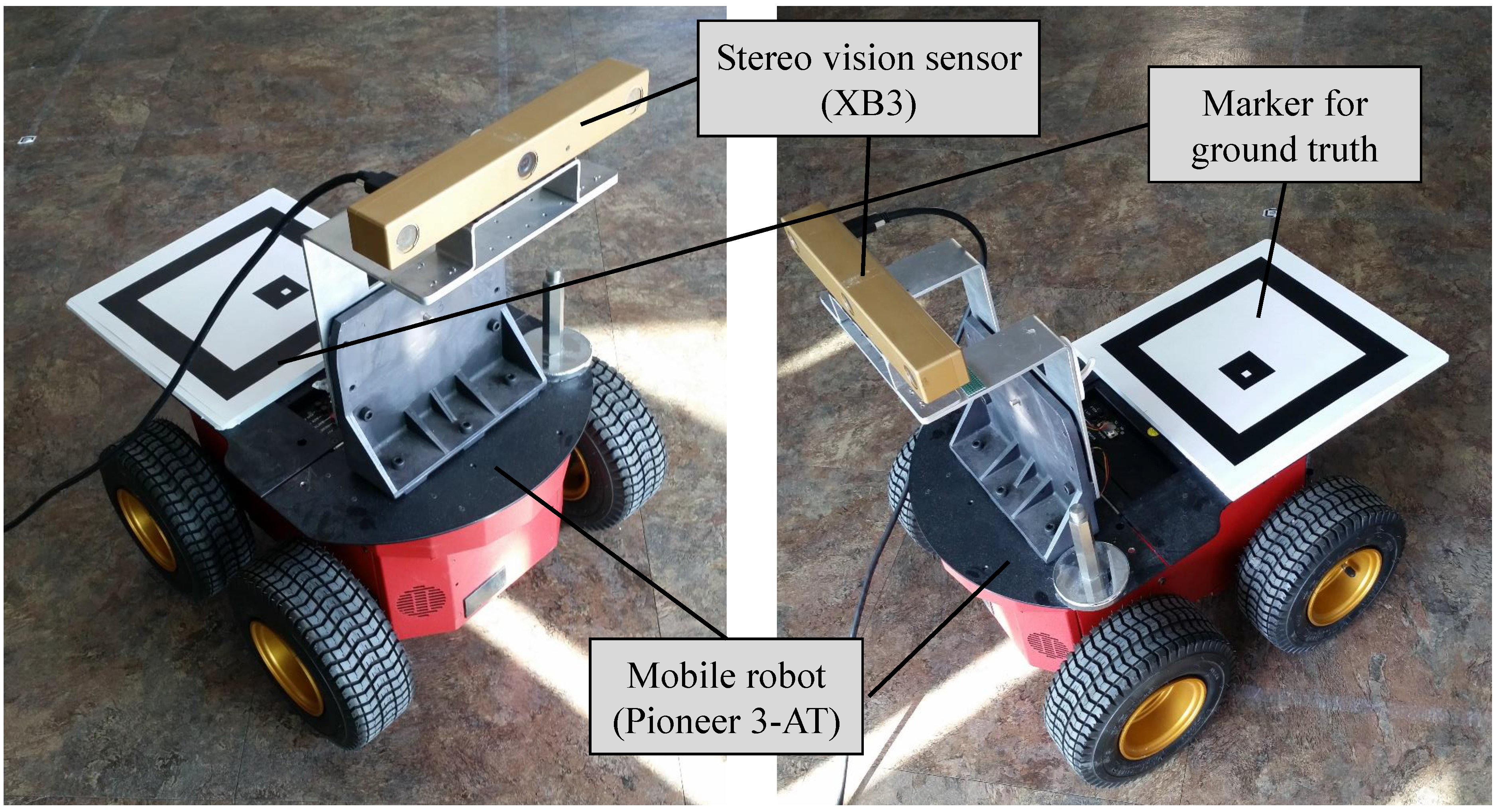
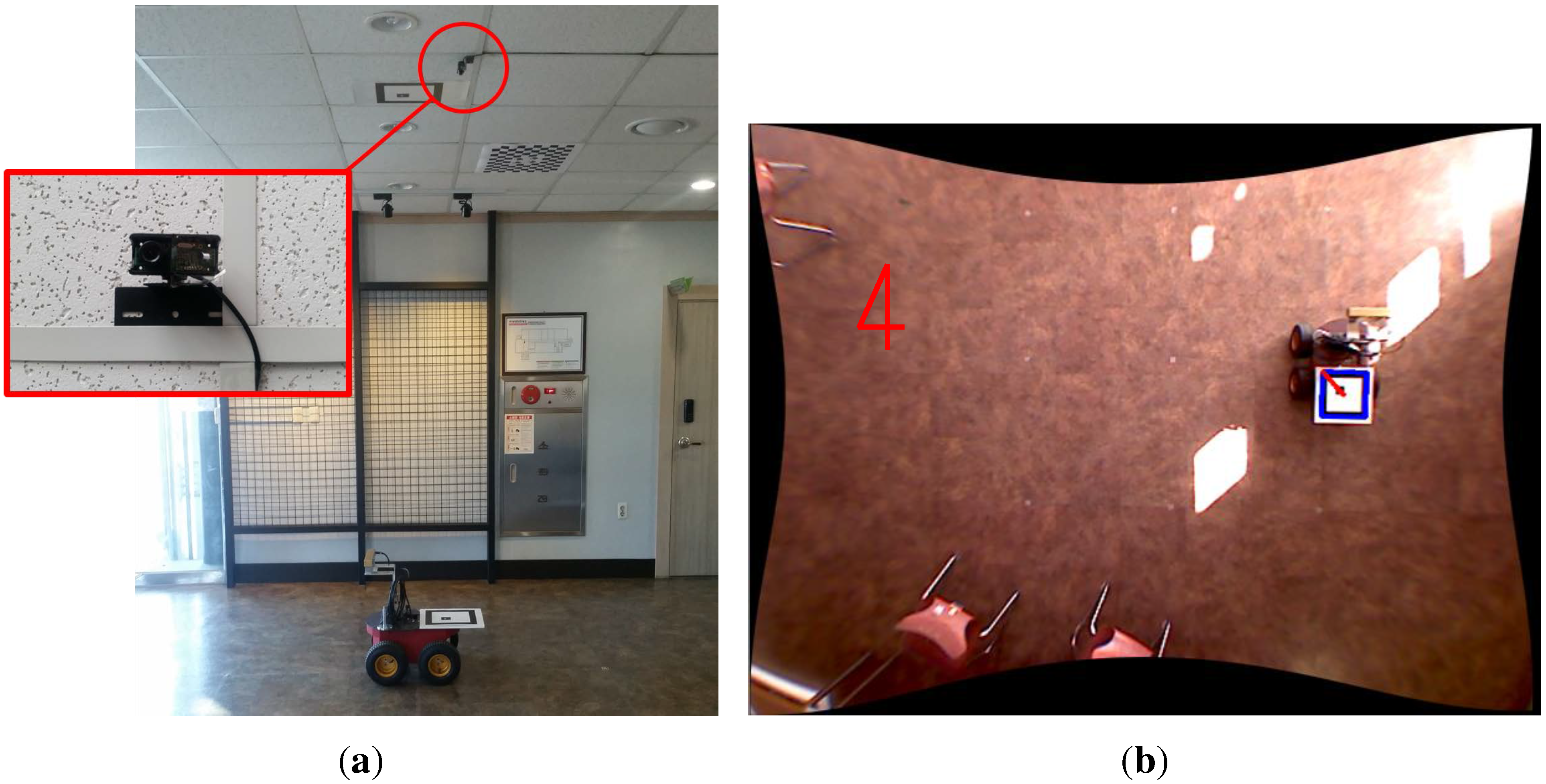
4.2. Experiment in Indoor Environment

| P3P Algorithm | OPnP Algorithm | Proposed Algorithm | ||||
|---|---|---|---|---|---|---|
| Mean | Stdev | Mean | Stdev | Mean | Stdev | |
| x | 0.2812 | 0.0218 | 0.2752 | 0.0373 | 0.224 | 0.0152 |
| y | 0.2543 | 0.0229 | 0.2813 | 0.0362 | 0.2079 | 0.0131 |
| z | 0.022 | 0.0003 | 0.0641 | 0.0026 | 0.0244 | 0.0003 |
| 0.5857 | 0.2521 | 1.4794 | 0.3213 | 0.7875 | 0.2246 | |
| 0.6502 | 0.2717 | 1.3515 | 0.2914 | 0.6794 | 0.2816 | |
| 4.9775 | 5.0588 | 5.7647 | 4.5845 | 2.0417 | 2.8283 | |
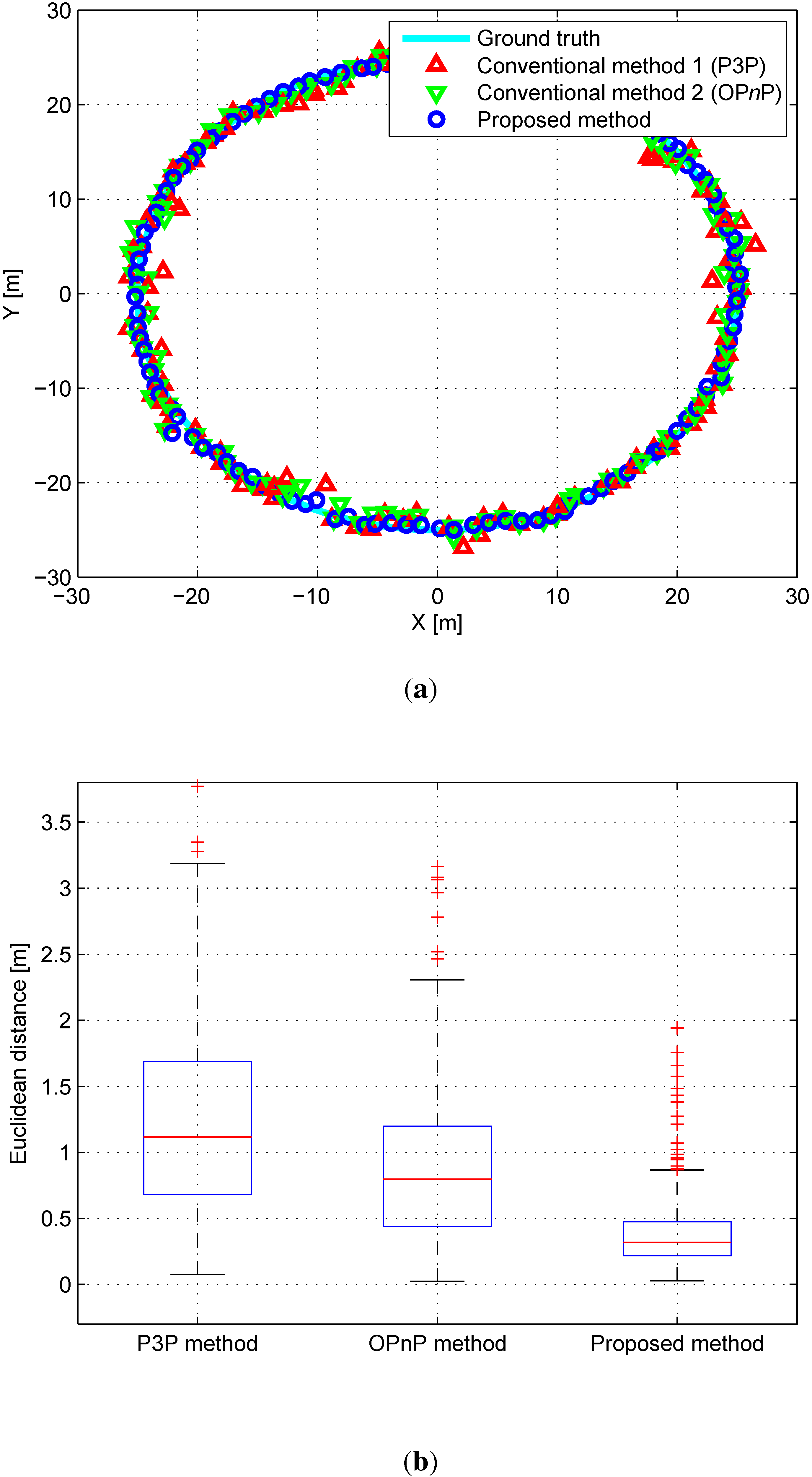
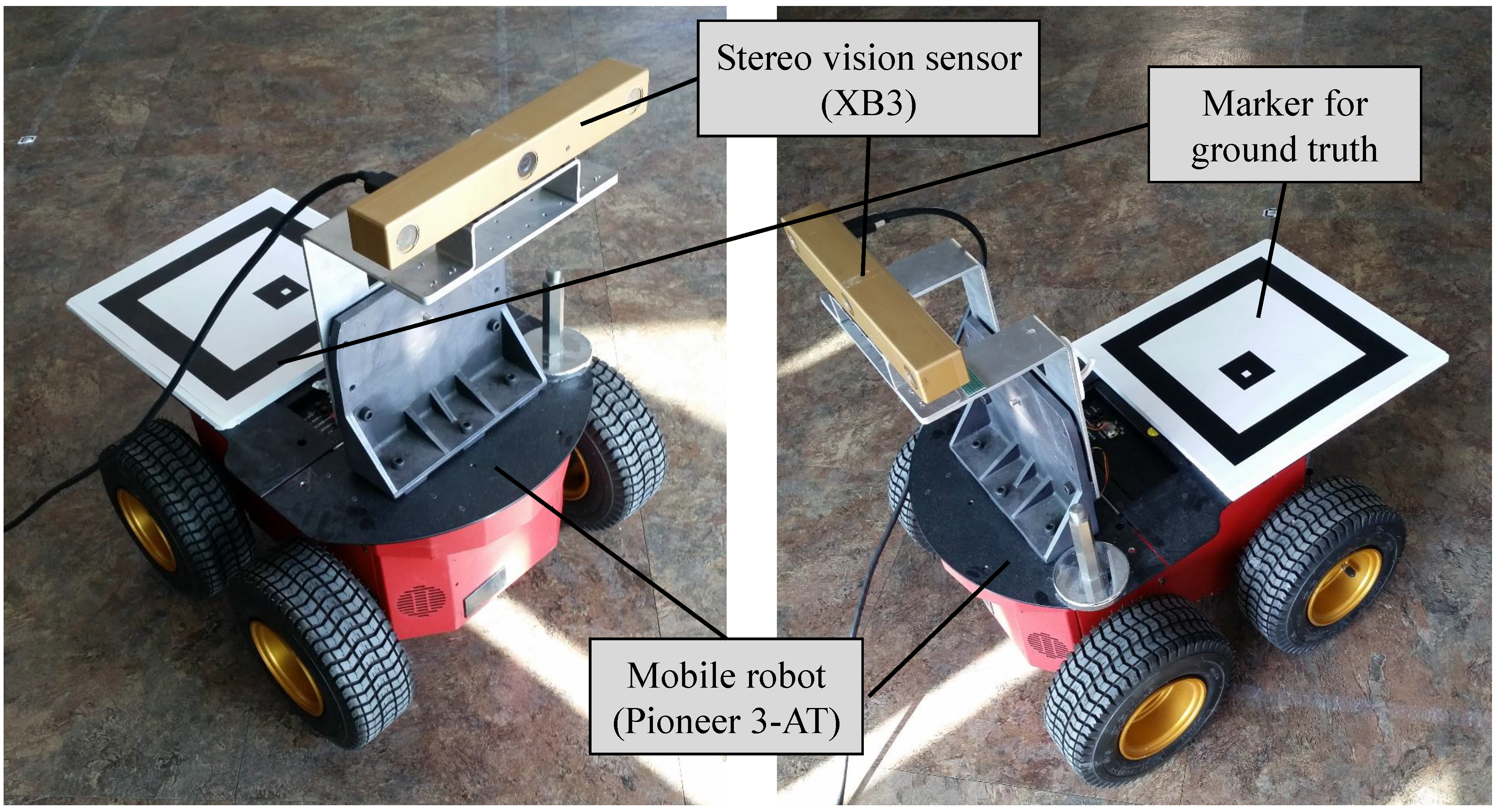
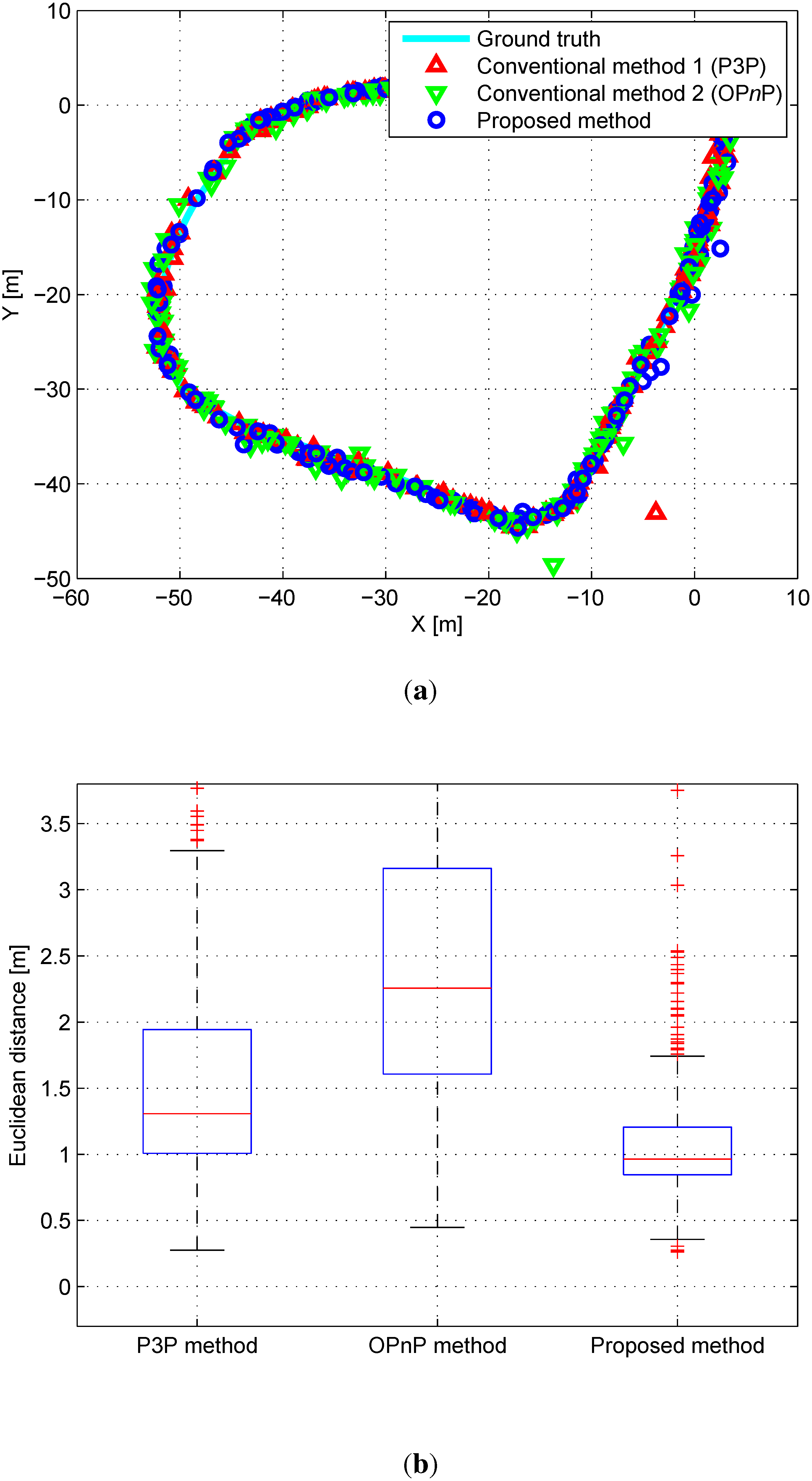
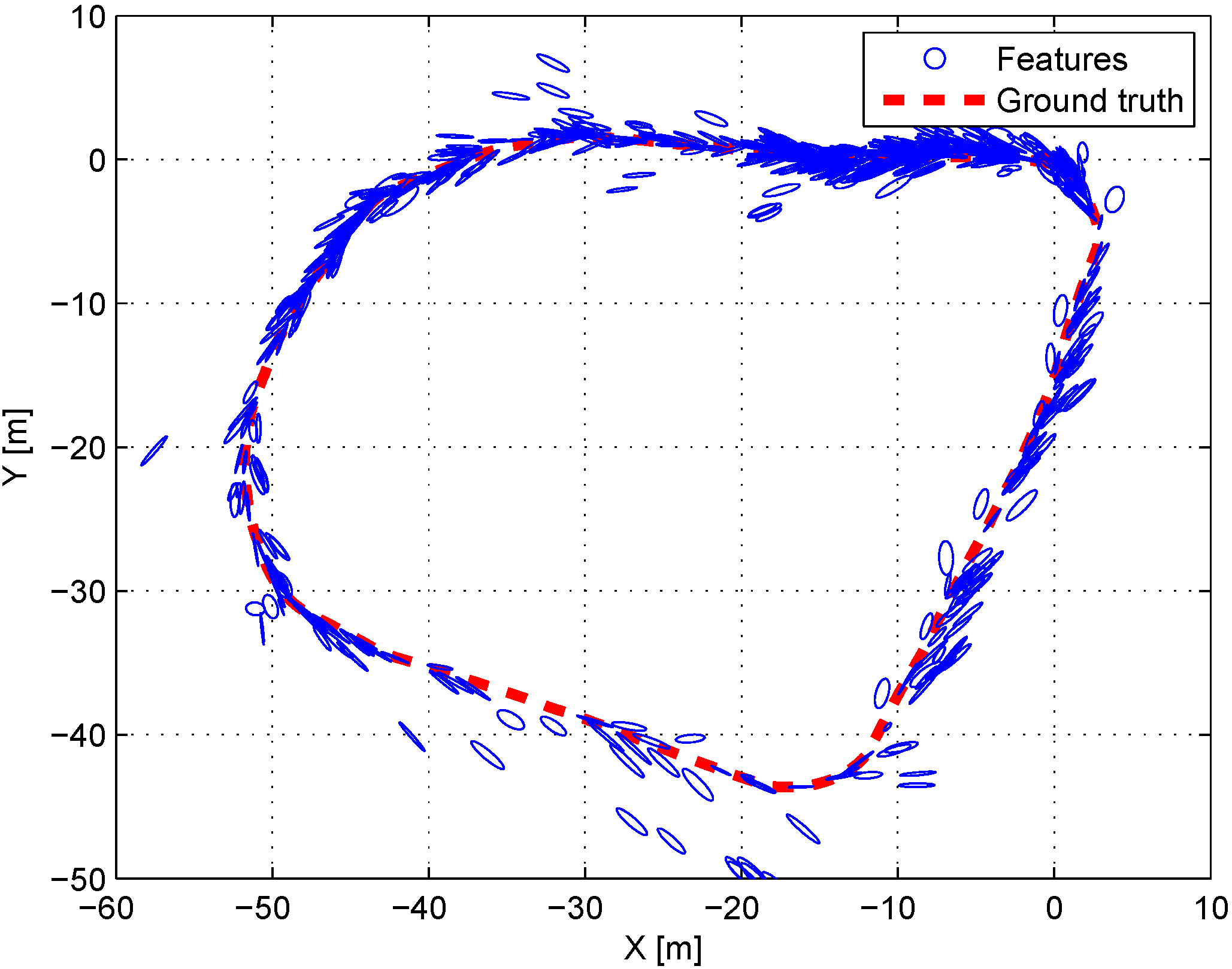
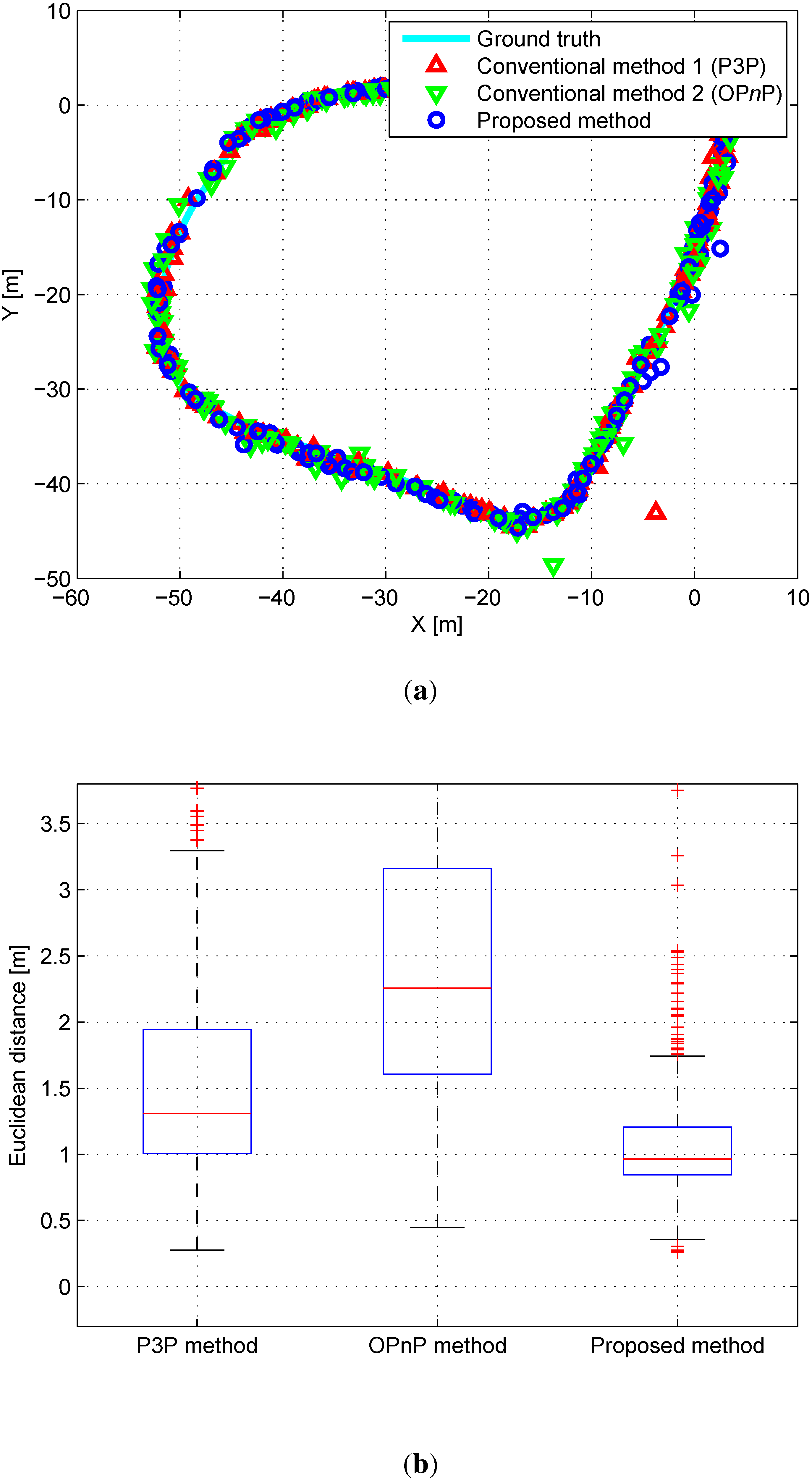
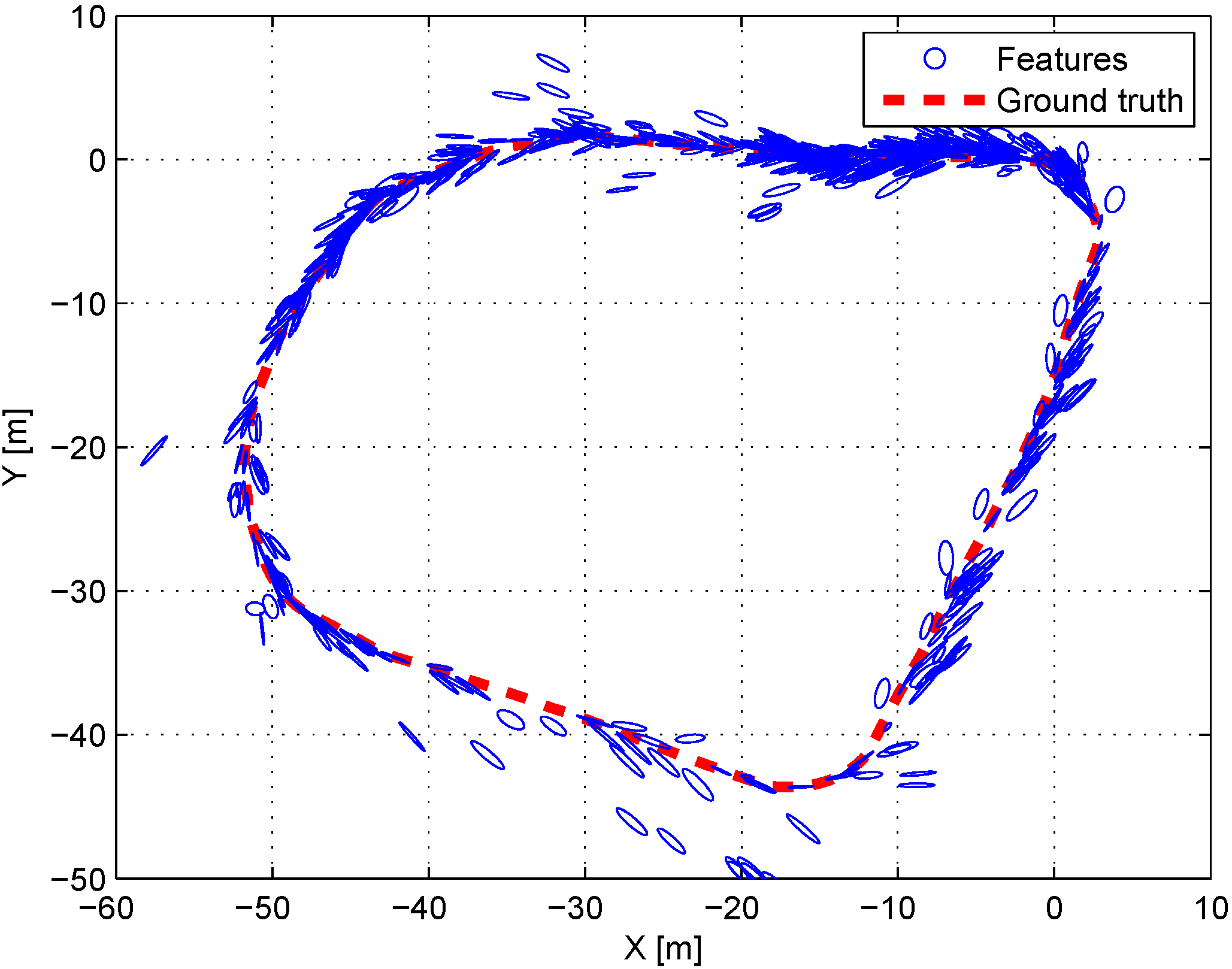
4.3. Experiment in Outdoor Environment

| P3P Algorithm | OPnP Algorithm | Proposed Algorithm | ||||
|---|---|---|---|---|---|---|
| Mean | Stdev | Mean | Stdev | Mean | Stdev | |
| x | 1.0865 | 0.5374 | 2.1011 | 1.2546 | 0.7473 | 0.1549 |
| y | 0.8908 | 0.4334 | 1.5947 | 2.0542 | 0.6935 | 0.2382 |
| z | 0.1607 | 0.0376 | 0.2056 | 0.0541 | 0.1754 | 0.0356 |
| 1.409 | 1.9777 | 0.4489 | 1.1541 | 2.1761 | 3.9504 | |
| 1.4347 | 2.4532 | 1.2055 | 2.5132 | 1.3489 | 2.1354 | |
| 2.155 | 4.264 | 3.1218 | 5.1235 | 1.5689 | 1.9399 | |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Snavely, N.; Seitz, S.M.; Szeliski, R. Photo tourism: Exploring photo collections in 3D. ACM Trans. Graph. 2006, 25, 835–846. [Google Scholar] [CrossRef]
- Anguelov, D.; Dulong, C.; Filip, D.; Frueh, C.; Lafon, S.; Lyon, R.; Ogale, A.; Vincent, L.; Weaver, J. Google street view: Capturing the world at street level. Computer 2010, 43, 32–38. [Google Scholar] [CrossRef]
- Li, Y.; Snavely, N.; Huttenlocher, D.P. Location Recognition Using Prioritized Feature Matching. In Proceedings of 11th European Conference on Computer Vision (ECCV), Heraklion, Rethymnon, Greece, 5–11 September 2010; pp. 791–804.
- Robertson, D.P.; Cipolla, R. An Image-Based System for Urban Navigation. In Proceedings of the British Machine Vision Conference (BMVC), Nottingham, UK, 1–5 Sptember 2004; pp. 1–10.
- Kosecka, J.; Zhou, L.; Barber, P.; Duric, Z. Qualitative Image Based Localization in Indoors Environments. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Fairfax, VA, USA, 18–20 June 2003; Volume 2, pp. 3–8.
- Napier, A.; Newman, P. Generation and Exploitation of Local Orthographic Imagery for Road Vehicle Localisation. In Proceedings of the IEEE Symposium on Intelligent Vehicles (IV), Madrid, Spain, 3–7 June 2012; pp. 590–596.
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; van Gool, L. SURF: Speeded up Robust Features. In Proceedings of the European Conference on Computer Vision (ECCV), Graz, Austria, 7–13 May 2006; pp. 404–417.
- Zhang, W.; Kosecka, J. Image Based Localization in Urban Environments. In Proceedings of the IEEE Third International Symposium on 3D Data Processing, Visualization, and Transmission, Chapel Hill, NC, USA, 14–16 June 2006; pp. 33–40.
- Lu, G.; Kambhamettu, C. Image-Based Indoor Localization System Based on 3D SfM Model. In Proceedings of the International Society for Optics and Photonics on IS&T/SPIE Electronic Imaging, San Francisco, CA, USA, 2 February 2014; pp. 90250H-1–90250H-8.
- Kim, H.; Lee, D.; Oh, T.; Lee, S.W.; Choe, Y.; Myung, H. Feature-Based 6-DoF Camera Localization Using Prior Point Cloud and Images. In Proceedings of the Robot Intelligence Technology and Applications (RiTA), Beijing, China, 6–8 November 2014; pp. 3–11.
- Jebara, T.; Azarbayejani, A.; Pentland, A. 3D structure from 2D motion. IEEE Signal Process. Mag. 1999, 16, 66–84. [Google Scholar] [CrossRef]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle Adjustment–A Modern Synthesis. In Proceedings of the International Workshop on Vision Algorithms: Theory and Practice, Corfu, Greece, 21–22 September 2000; pp. 298–372.
- Frahm, J.M.; Fite-Georgel, P.; Gallup, D.; Johnson, T.; Raguram, R.; Wu, C.; Jen, Y.H.; Dunn, E.; Clipp, B.; Lazebnik, S.; et al. Building Rome on a Cloudless Day. In Proceedings of European Conference on Computer Vision (ECCV), Heraklion, Crete, Greece, 5–11 September 2010; pp. 368–381.
- Strecha, C.; Pylvanainen, T.; Fua, P. Dynamic and Scalable Large Scale Image Reconstruction. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; pp. 406–413.
- Pollefeys, M.; Nistér, D.; Frahm, J.M.; Akbarzadeh, A.; Mordohai, P.; Clipp, B.; Engels, C.; Gallup, D.; Kim, S.J.; Merrell, P.; et al. Detailed real-time urban 3D reconstruction from video. Int. J. Comput. Vis. 2008, 78, 143–167. [Google Scholar] [CrossRef]
- Sattler, T.; Leibe, B.; Kobbelt, L. Fast Image-Based Localization Using Direct 2D-to-3D Matching. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 667–674.
- Irschara, A.; Zach, C.; Frahm, J.M.; Bischof, H. From Structure-from-Motion Point Clouds to Fast Location Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Miami, FL, USA, 20–25 June 2009; pp. 2599–2606.
- Lu, G.; Ly, V.; Shen, H.; Kolagunda, A.; Kambhamettu, C. Improving Image-Based Localization through Increasing Correct Feature Correspondences. In Proceedings of the International Symposium on Advances in Visual Computing, Crete, Greece, 29–31 July 2013; pp. 312–321.
- Gao, X.S.; Hou, X.R.; Tang, J.; Cheng, H.F. Complete solution classification for the perspective-three-point problem. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 930–943. [Google Scholar]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. EPnP: An accurate O(n) solution to the PnP problem. Int. J. Comput. Vis. 2009, 81, 155–166. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Kuang, Y.; Sugimoto, S.; Astrom, K.; Okutomi, M. Revisiting the pnp Problem: A Fast, General and Optimal Solution. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Sydney, NSW, Australia, 1–8 December 2013; pp. 2344–2351.
- Garro, V.; Crosilla, F.; Fusiello, A. Solving the pnp Problem with Anisotropic Orthogonal Procrustes Analysis. In Proceedings of the Second International Conference on 3D Imaging, Modeling, Processing, Visualization & Transmission, Zurich, Switzerland, 13–15 October 2012; pp. 262–269.
- Ferraz, L.; Binefa, X.; Moreno-Noguer, F. Very Fast Solution to the PnP Problem with Algebraic Outlier Rejection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 501–508.
- Ferraz, L.; Binefa, X.; Moreno-Noguer, F. Leveraging Feature Uncertainty in the PnP Problem. In Proceedings of the British Machine Vision Conference (BMVC), Nottingham, UK, 1–5 September 2014.
- Henry, P.; Krainin, M.; Herbst, E.; Ren, X.; Fox, D. RGB-D mapping: Using Kinect-style depth cameras for dense 3D modeling of indoor environments. Int. J. Robot. Res. 2012, 31, 647–663. [Google Scholar] [CrossRef]
- Konolige, K.; Agrawal, M. FrameSLAM: From bundle adjustment to real-time visual mapping. IEEE Trans. Robot. 2008, 24, 1066–1077. [Google Scholar] [CrossRef]
- Lee, D.; Myung, H. Solution to the SLAM problem in low dynamic environments using a pose graph and an RGB-D sensor. Sensors 2014, 14, 12467–12496. [Google Scholar] [CrossRef] [PubMed]
- Davison, A.J. Real-Time Simultaneous Localisation and Mapping with a Single Camera. In Proceedings of the 9th IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; pp. 1403–1410.
- Lemaire, T.; Lacroix, S.; Sola, J. A practical 3D Bearing-Only SLAM Algorithm. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Edmonton, AB, Canada, 2–6 August 2005; pp. 2449–2454.
- Davison, A.J.; Cid, Y.G.; Kita, N. Real-Time 3D SLAM with Wide-Angle Vision. In Proceedings of the IFAC/EURON Symposium on Intelligent Autonomous Vehicles, Lisbon, Portugal, 5–7 July 2004.
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-time single camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jeong, W.; Lee, K.M. CV-SLAM: A New Ceiling Vision-Based SLAM Technique. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Edmonton, AB, Canada, 2–6 August 2005; pp. 3195–3200.
- Bhandarkar, S.M.; Suk, M. Hough Clustering Technique for Surface Matching. In Proceedings of the International Association of Pattern Recognition (IAPR) Workshop on Computer Vision, Tokyo, Japan, 12–14 October 1988; pp. 82–85.
- Lee, S.; Lee, S.; Baek, S. Vision-based kidnap recovery with SLAM for home cleaning robots. J. Intell. Robot. Syst. 2012, 67, 7–24. [Google Scholar] [CrossRef]
- Costa, A.; Kantor, G.; Choset, H. Bearing-Only Landmark Initialization with Unknown Data Association. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), New Orleans, LA, USA, 26 April–1 May 2004; Volume 2, pp. 1764–1770.
- Bailey, T. Constrained Initialisation for Bearing-Only SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Taipei, Taiwan, 14–19 September 2003; Volume 2, pp. 1966–1971.
- Stereo Accuracy and Error Model of XB3. Available online: http://www.ptgrey.com/support/downloads/10403? (accessed on 27 April 2015).
- Smith, R.C.; Cheeseman, P. On the representation and estimation of spatial uncertainty. Int. J. Robot. Res. 1986, 5, 56–68. [Google Scholar] [CrossRef]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Beis, J.S.; Lowe, D.G. Shape Indexing Using Approximate Nearest-Neighbour Search in High-Dimensional Spaces. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Juan, Puerto Rico, 17–19 June 1997; pp. 1000–1006.
- Bhattacharyya, A. On a measure of divergence between two multinomial populations. Sankhyā: Indian J. Stat. 1946, 7, 401–406. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Murty, K.G.; Yu, F.T. Linear Complementarity, Linear and Nonlinear Programming; Heldermann Verlag: Berlin, Germany, 1988. [Google Scholar]
- Pioneer 3-AT. Available online: http://www.mobilerobots.com/ResearchRobots/P3AT.aspx (accessed on 27 April 2015).
- Bumblebee XB3. Available online: http://www.ptgrey.com/bumblebee-xb3-1394b-stereo-vision-camera-systems-2 (accessed on 27 April 2015).
- Huace X90 RTK-GPS. Available online: http://geotrax.in/assets/x90GNSS_Datasheet.pdf (accessed on 27 April 2015).
- E2BOX IMU. Available online: http://www.e2box.co.kr/124 (accessed on 27 April 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Lee, D.; Oh, T.; Choi, H.-T.; Myung, H. A Probabilistic Feature Map-Based Localization System Using a Monocular Camera. Sensors 2015, 15, 21636-21659. https://doi.org/10.3390/s150921636
Kim H, Lee D, Oh T, Choi H-T, Myung H. A Probabilistic Feature Map-Based Localization System Using a Monocular Camera. Sensors. 2015; 15(9):21636-21659. https://doi.org/10.3390/s150921636
Chicago/Turabian StyleKim, Hyungjin, Donghwa Lee, Taekjun Oh, Hyun-Taek Choi, and Hyun Myung. 2015. "A Probabilistic Feature Map-Based Localization System Using a Monocular Camera" Sensors 15, no. 9: 21636-21659. https://doi.org/10.3390/s150921636