This section is divided into several subsections in order to provide a general overview of the different areas that cover the topics of this paper. First, in
Section 2.1, we review published conductivity studies in groundwater.
Section 2.2 shows a summary of works where authors present the conductivity status or changes in groundwater. This subsection also analyzes the need of using a conductivity sensor for conductivity monitoring in groundwater. Finally,
Section 2.3 presents the state of art of conductivity sensors.
2.1. Conductivity Studies in Groundwater
This subsection shows a compilation of the main studies carried out by other authors about the conductivity status and its evolution in groundwater all over the world.
Table 2 presents several examples where authors studied the value of conductivity in groundwater. To study the salinization process of groundwater, authors analyzed the value of Electrical Conductivity (EC) or Total Dissolved Solids (TDS) among others. EC and TDS are water properties that bring general information about the salinization level. Authors studied the % of different ions or even the presence of specific isotopes to obtain more detailed information. Nevertheless, the values of EC or TDS themselves are good indicators of changes. Besides, they are easier to measure than the presence of a specific ion. Some studies analyzed TDS [
26,
27,
28,
29], others studied the EC [
30,
31,
32,
33,
34,
35,
36], a small part of them studied both parameters [
37,
38,
39] and, in [
40], other authors measured other parameters (g/L). Most of these studies (60%) analyzed the problem of salinization from a static point of view. On the other hand, 40% of the performed studies are based on dynamic data analysis collected during different years. However, not all of these studies analyzed the same phenomena. Works presented in [
27,
28] were focused on long term evolution but authors studied the anthropogenic and natural causes and do not focus the work on the extraction of water supplies.
Only three of the previous papers presented in this related work evaluated the changes of salinity in groundwater with water pumping, agricultural pumping in [
38,
40] and industrial pumping in [
34]. However, we have observed that there are no papers providing long-term measurements in urban environments. For that reason, in this paper a specific conductivity sensor for groundwater conductivity monitoring is presented.
Table 2.
Summary of current studies of salinization process in groundwater.
Table 2.
Summary of current studies of salinization process in groundwater.
| Ref. | Type of Study | Sampling Period | Number of Wells | Study Area (km2) | Country | EC/TDS | Conductivity Range (mS/cm) | Publish Year |
|---|
| [26] | Static | 1 Sampling period (2000/2001) | n/a | 500,000 | Korea | TDS | n/a | 2005 |
| [37] | Static | 1 Sampling period (2001) | 18 | 1845 | Korea | Both | 0.114 to 25 | 2003 |
| [30] | Static | 1 Sampling period (2009) | 79 | 35 | Italy | EC | 0.795 to 4.72 | 2012 |
| [31] | Static | 1 Sampling period (2006) | 41 | 190 | Morocco | EC | 2.55 to 21 | 2009 |
| [32] | Static | 3 Sampling period (2005/2006) | 8 | 750 | France | EC | 0.1 to 57.9 | 2008 |
| [33] | Static | 1 Sampling period (2006) | n/a | n/a | Greece | EC | 0.5 to 24 | 2009 |
| [29] | Static | 1 Sampling period (2001) | n/a | n/a | China | TDS | n/a | 2005 |
| [35] | Static | 5 Sampling period (2007) | 55 | n/a | Turkey | EC | 0.1 to 42.8 | 2011 |
| [36] | Static | 1 Sampling period (2000/2001) | 69 | n/a | Australia | EC | 12.7 to 17.3 | 2006 |
| [38] | Dynamic | 1968 to 1995 | 35 | 1900 | Mexico | Both | 0.878 to 4.910 | 2004 |
| [34] | Dynamic | 1984 to2000 | 4 | n/a | Turkey | EC | 0.807 to 0.924 | 2004 |
| [27] | Dynamic | 1994 to 2004 | 26 | 1200 | Italy | TDS | n/a | 2011 |
| [28] | Dynamic | 1960 to 2010 | n/a | 90,000 | U.S.A | TDS | n/a | 2014 |
| [40] | Dynamic | 1996 to 2005 | 24 | 16,100 | Uzbekistan | Other | n/a | 2009 |
| [39] | Dynamic | 1999 to 2001 | 40 | n/a | India | Both | 2.4 to 2.6 | 2008 |
2.2. Salinity Sensors
In this subsection a review of the main conductivity sensors is presented. First, the different methods for measuring the conductivity in fluids are discussed. A comparative table is also presented where different conductivity sensors with different operational principles are compared.
There are different methods to measure the salinity of a liquid based on the changes of physical parameters between freshwater and saltwater. Those parameters are: density, light refraction and electrical conductivity (EC) [
41,
42]. However, due to its application, changes in density are not as useful as other parameters. Firstly, we analyze the use of light refraction to measure the salinity of water. When salinity of a liquid increases, the refraction angle of an incident light diverges. The saltier the water is, the more divergent the light incident angle is [
42]. Different sensors have been developed based on this principle [
42,
43,
44]. The sensors present good resolution and accuracy. However, their use in long term monitoring can result complicated. The need of cleaning surfaces where the light is in touch of samples is a big problem in water environments. Different bacteria and sediments can precipitate on the surface producing errors in the measurements inducing wrong results.
The last option is to measure the electric conductivity (EC) of the liquid; higher salinity entails higher electric conductivity. The previous subsection showed how several authors used the EC to evaluate the salinity of groundwater samples. There are two different methods to measure the EC, the conductive methodology and the inductive methodology. The first one is based on the transmission of electric current through the water. It uses two copper electrodes, the first one is powered with an electric current and the second electrode is placed near to the first one. The second one receives part of the electric current. The amount of current that receives the second electrode depends on the electric current of the first electrode, area of electrodes, distance between electrodes and water salinity. The electrodes must be in contact with the water. This supposes some drawbacks such as corrosion and the deposition of fine material or bacteria that can produce alterations on the transmission of electric current from the powered electrode. For long term monitoring, the electrodes must periodically be cleaned and replaced. That does not fit with the aim of having a low cost WSN for long term monitoring.
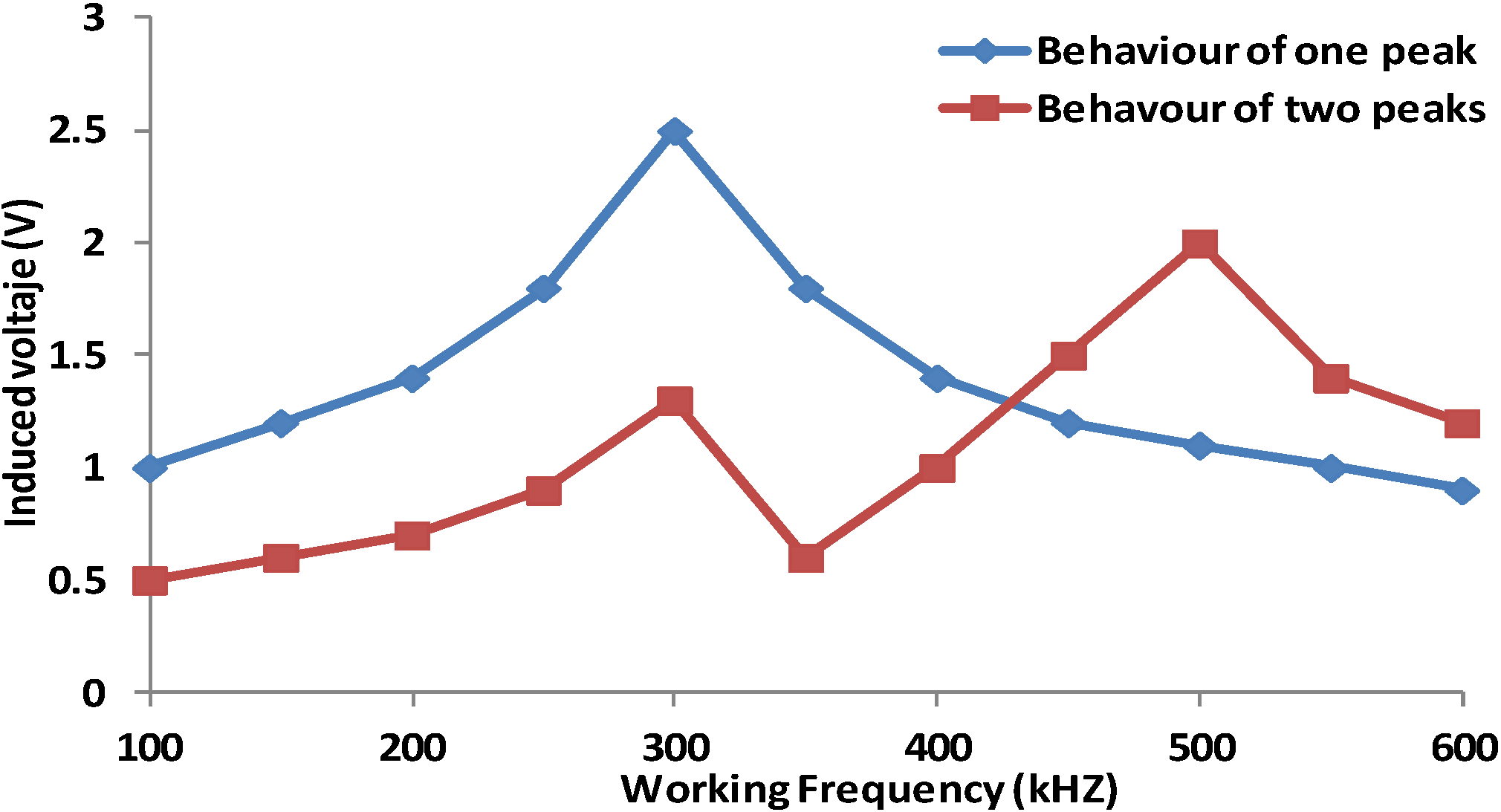
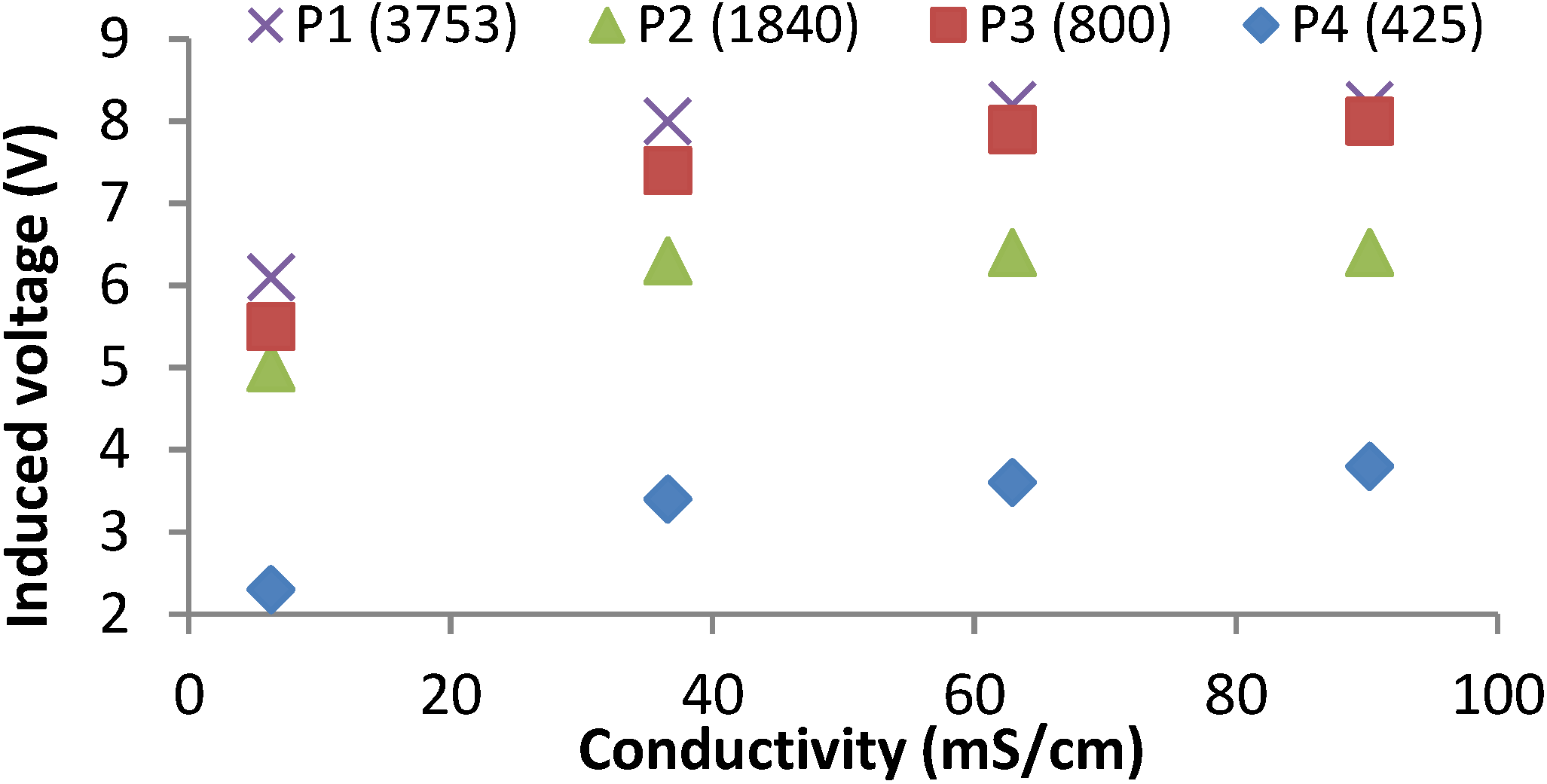
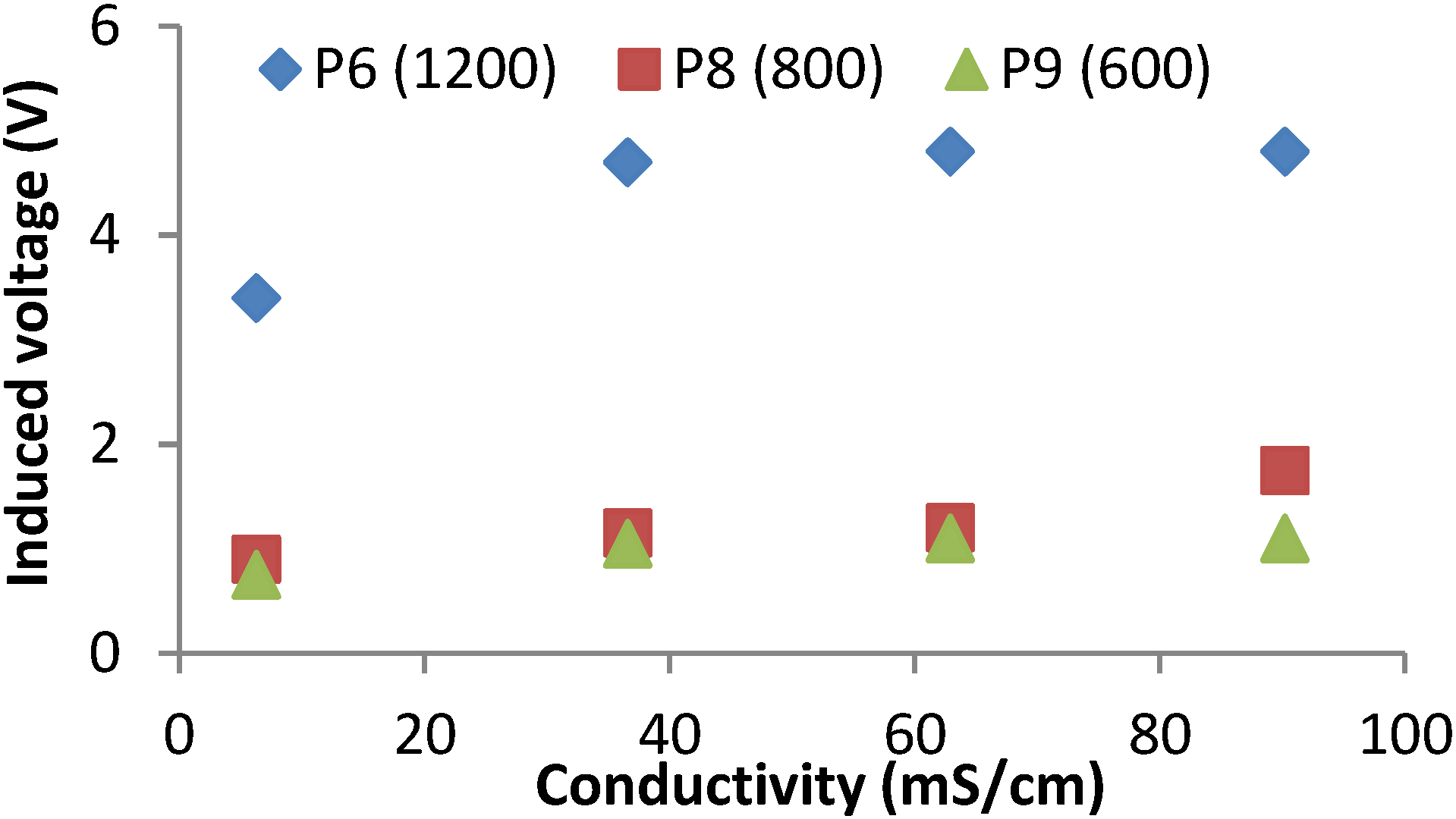
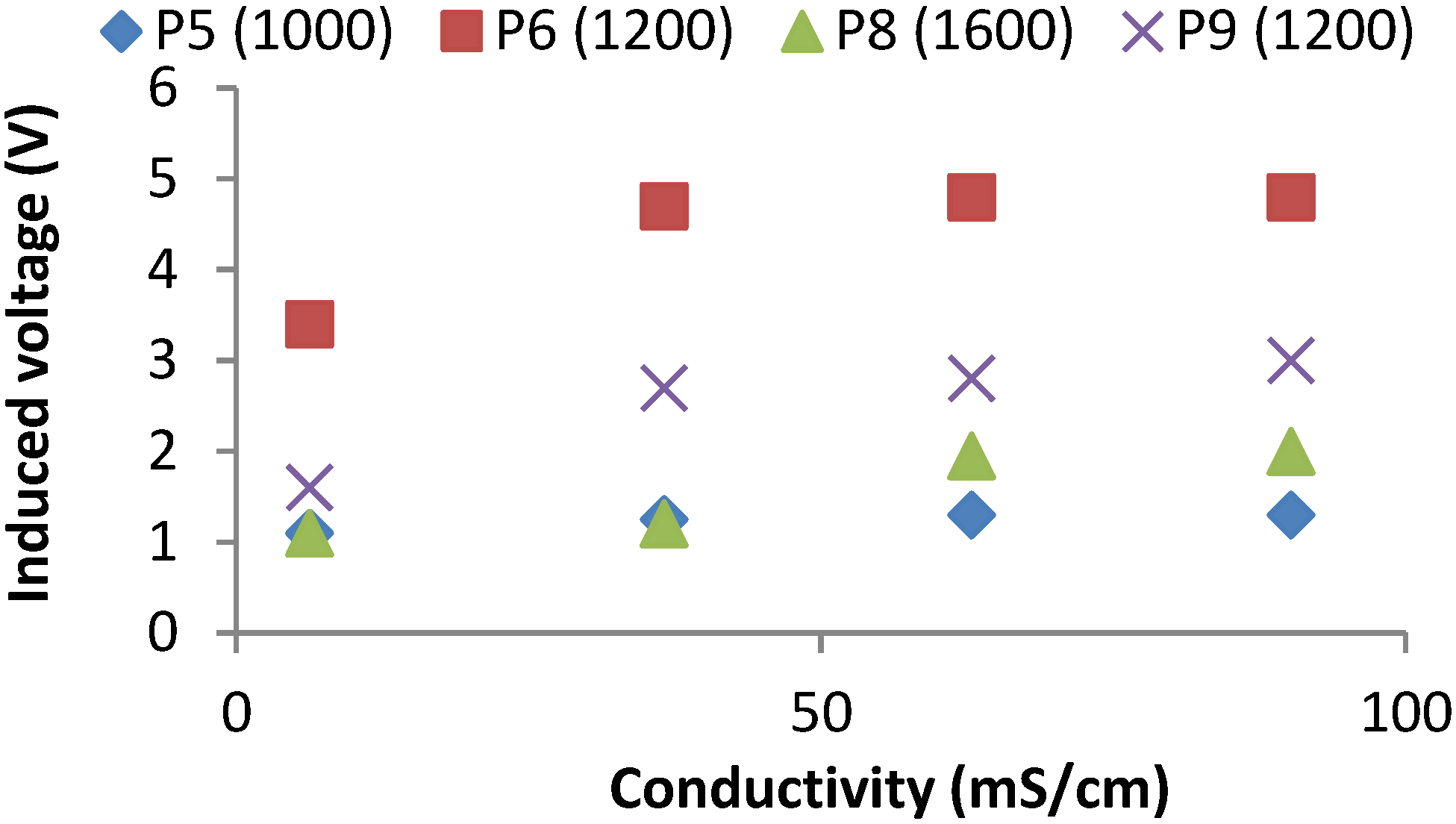
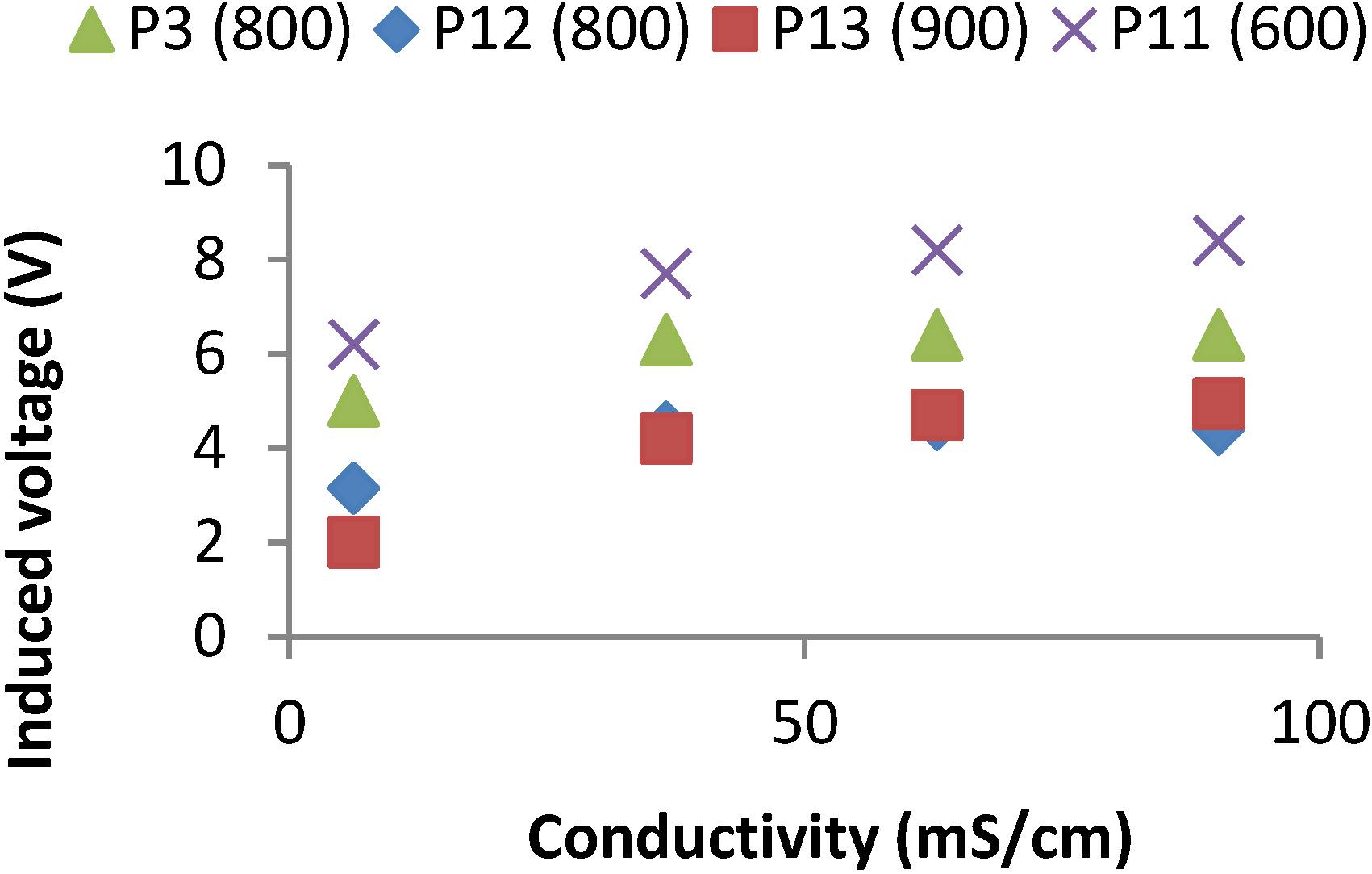
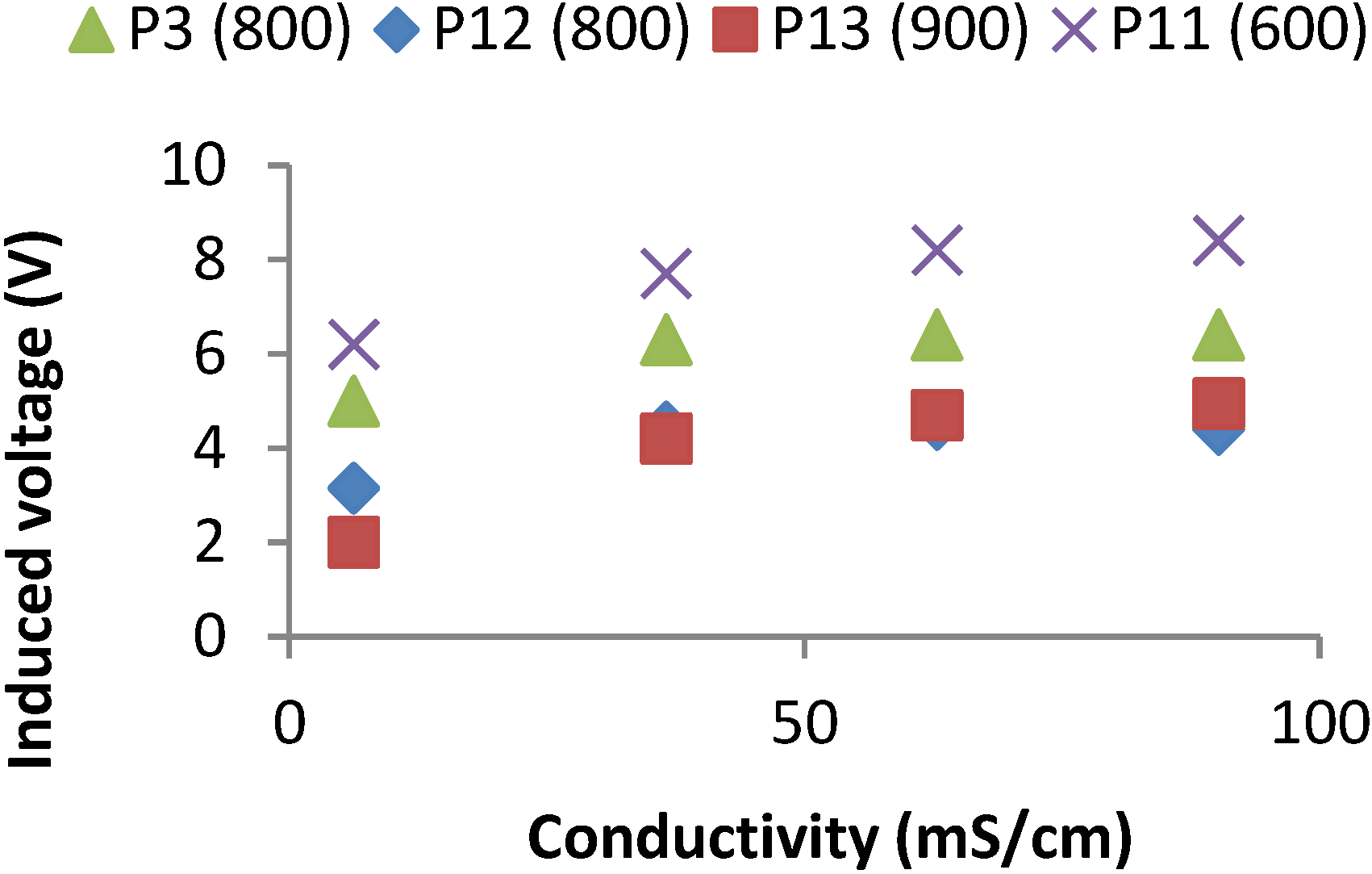
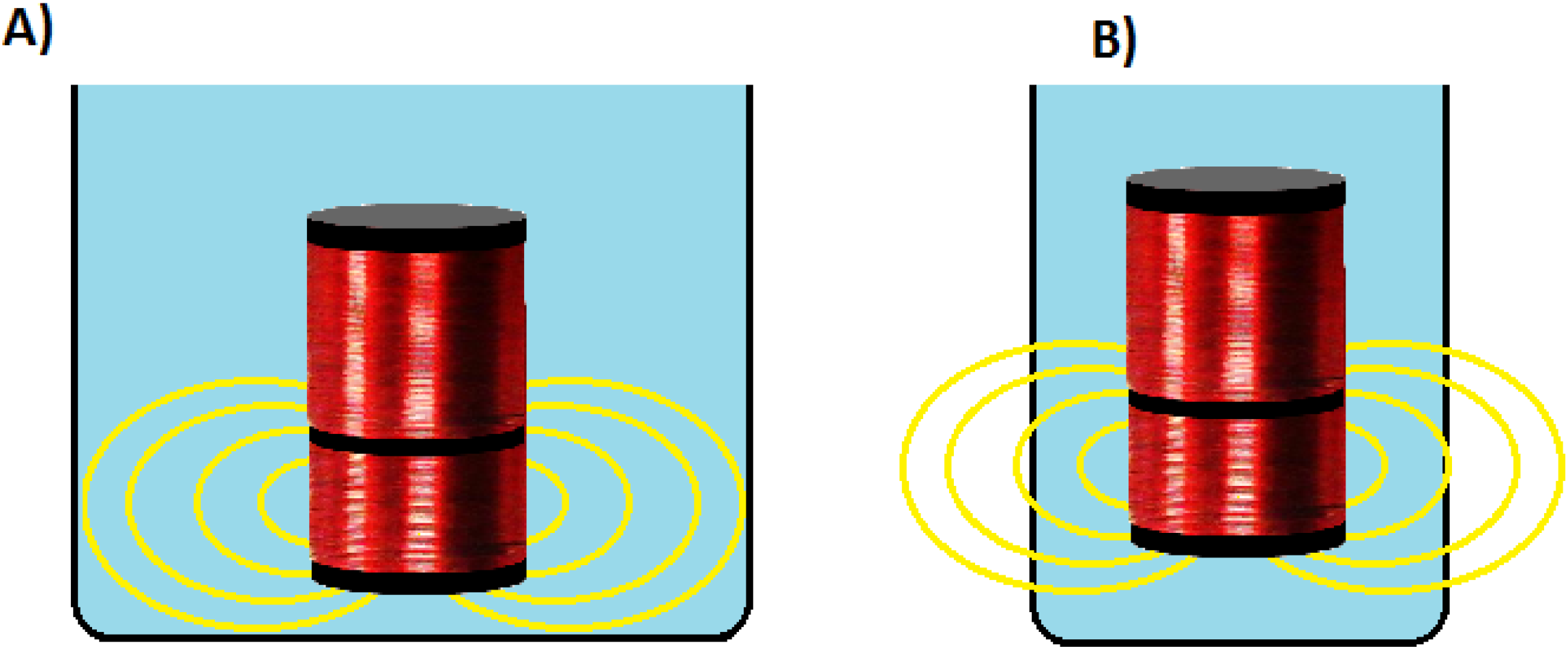
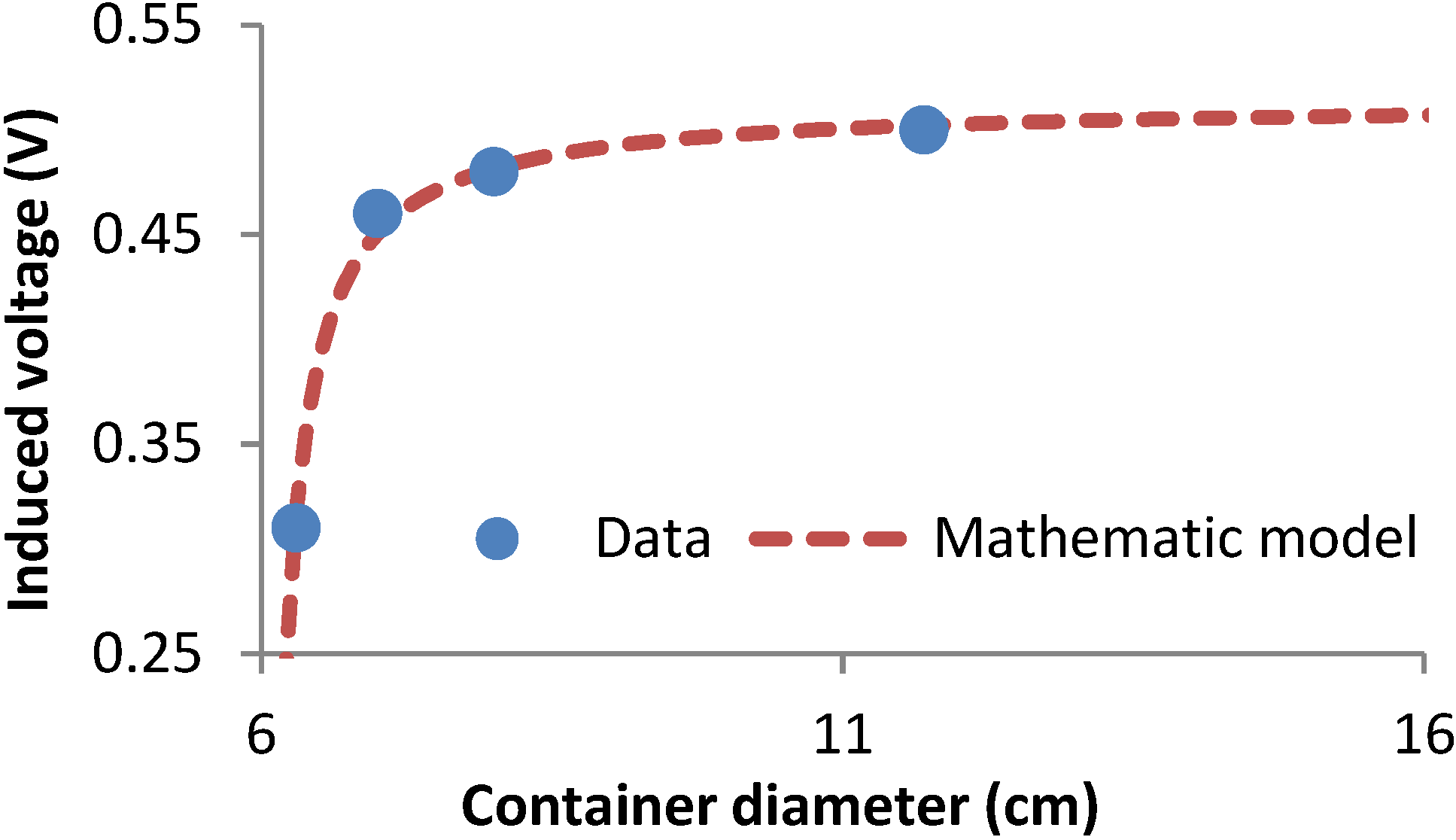
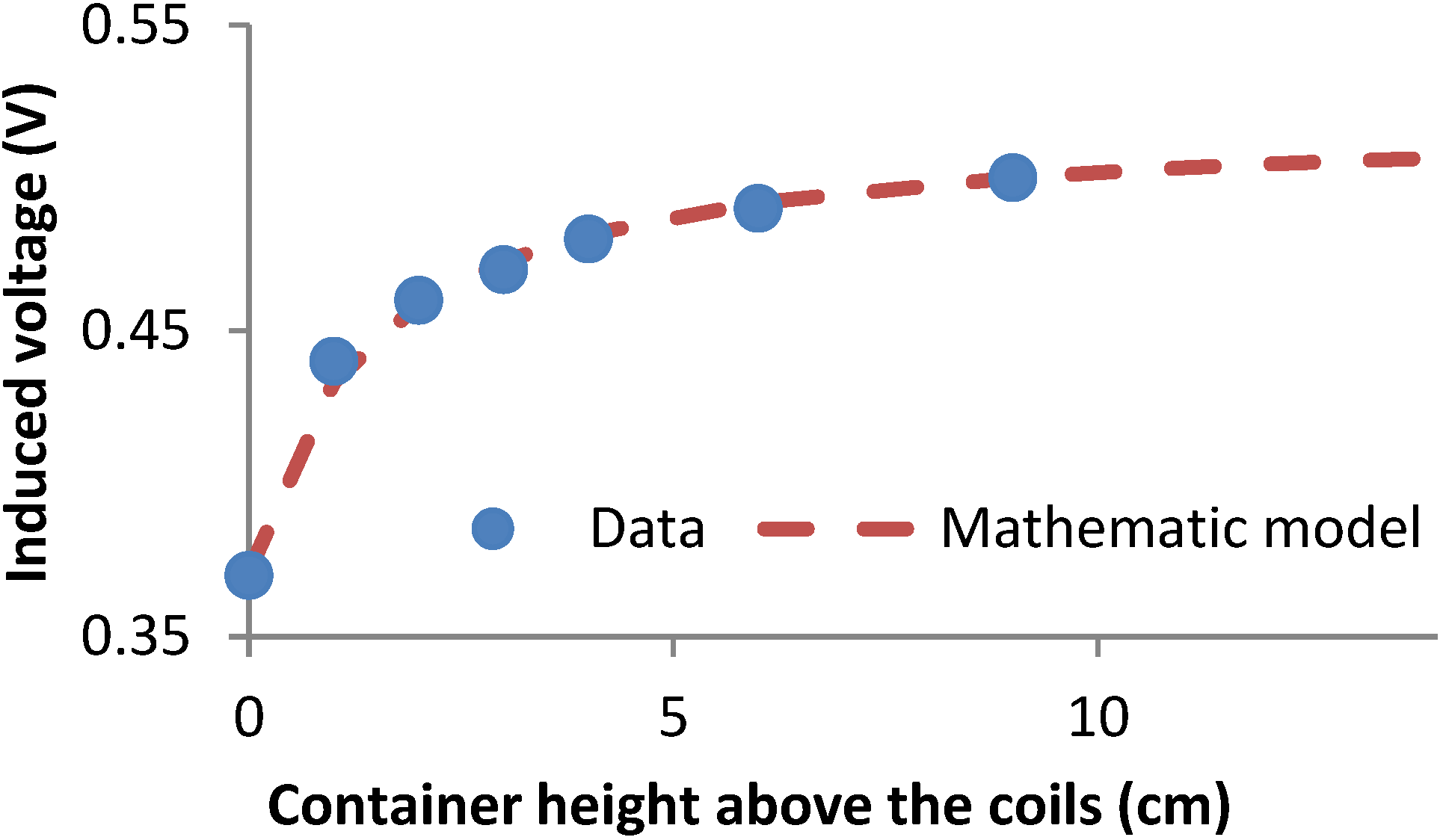
The inductive methodology is based on the attenuation of an electromagnetic field in the liquid. It uses two copper coils. One of them is powered and generates an electromagnetic field, and the second one presents an induced current due to that electromagnetic field. The magnitude of the induced current depends on several factors. However those factors are not so studied as in the case of conductive methodology. Generally, the size of coils [
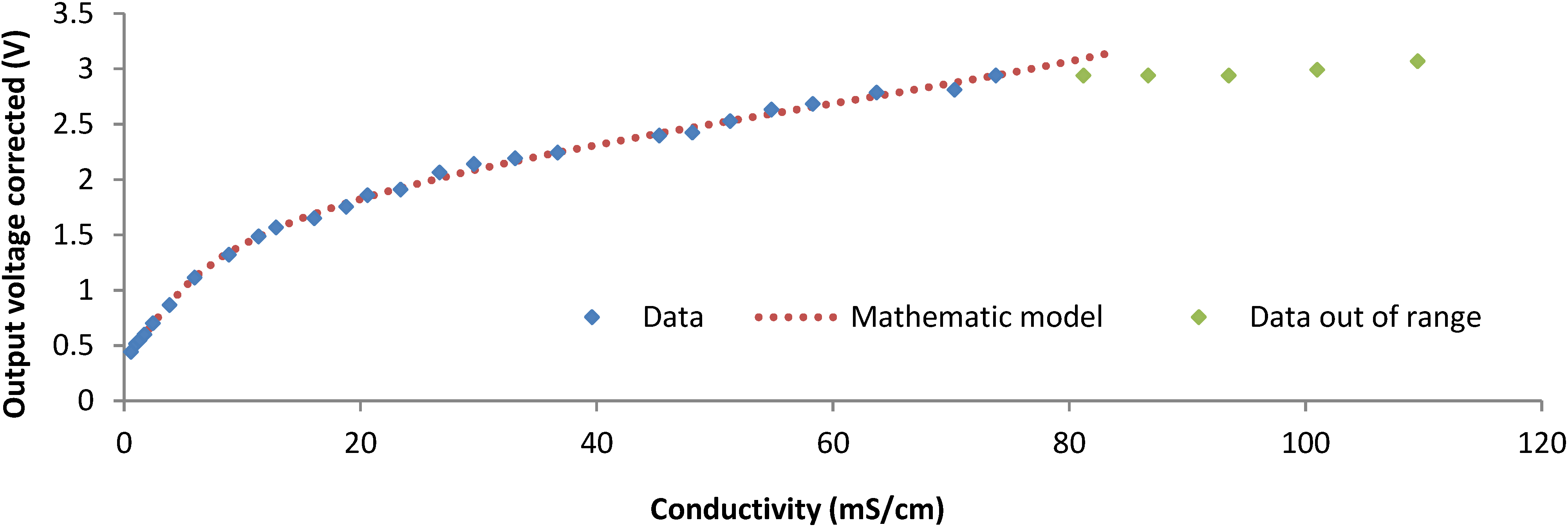
45], the salinity of water [
45,
46,
47,
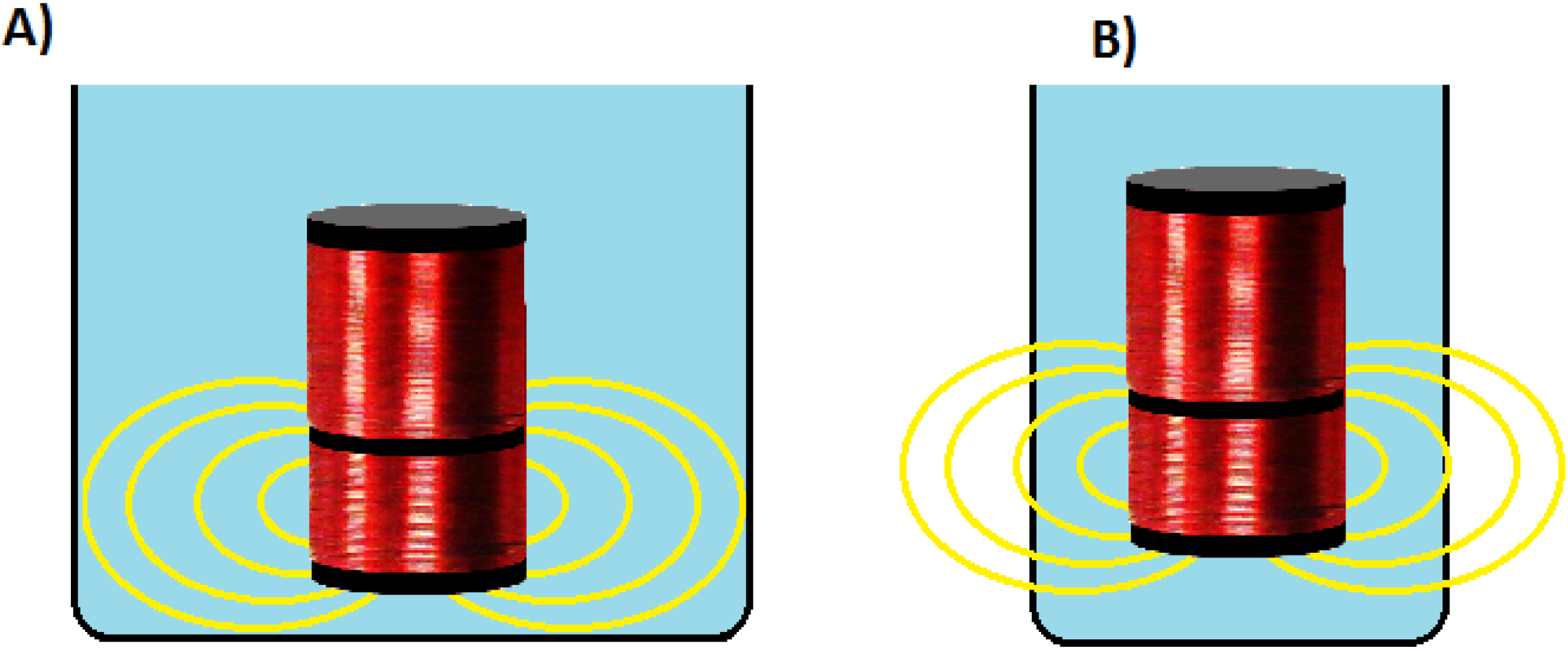
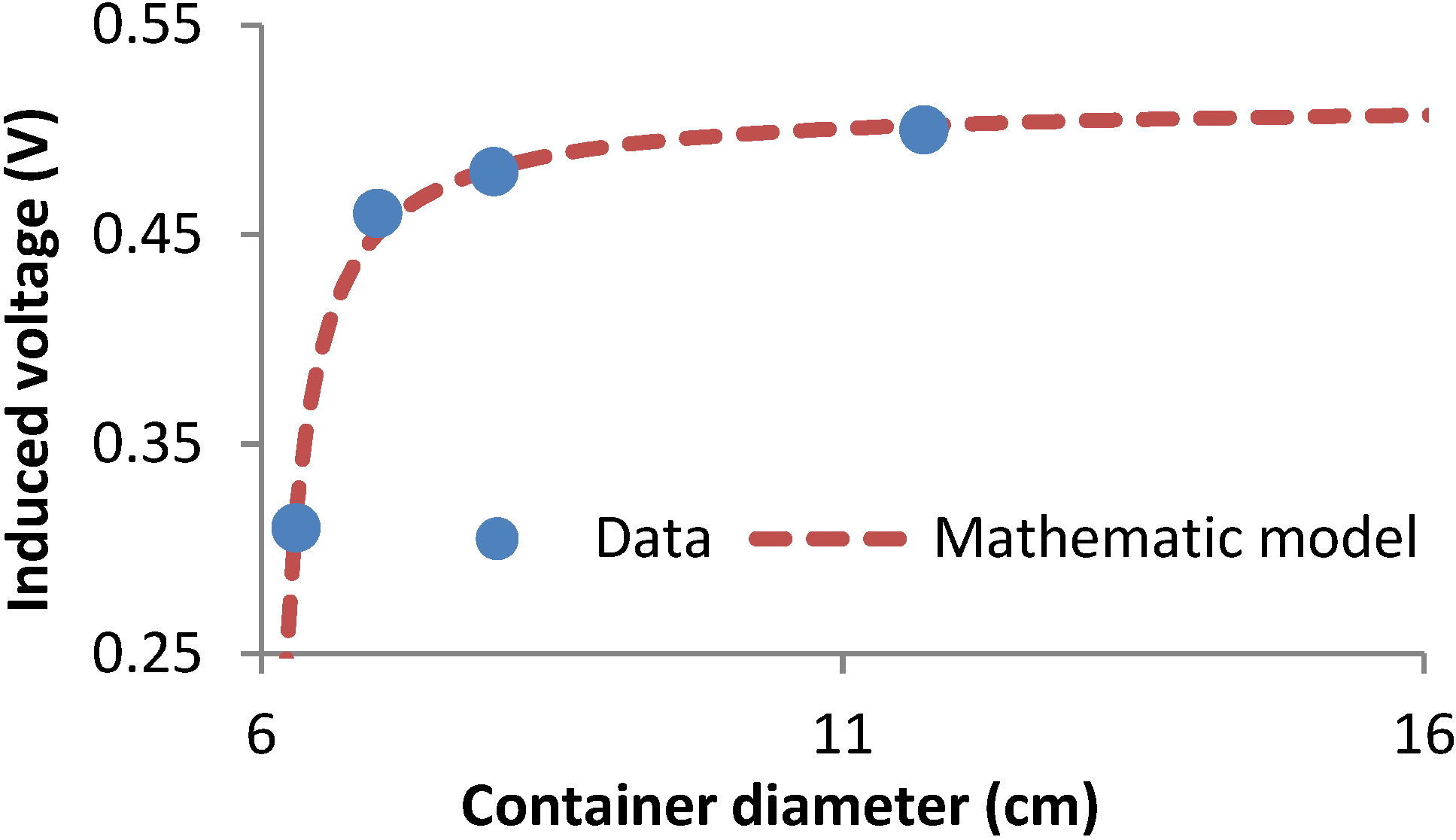
48] and even the volume of water [
49] are defined in different related work as important factors. This methodology makes it possible to isolate the copper parts from the water, as exposed in [
48]. Despite the great benefits this system offers, it is not widely used. The first time researchers mentioned measuring salinity using magnetic fields was in 1985 [
50]. Since then, few works have used this method. [
45,
46] are the sole works found where inductive methods are used. In these cases, the authors only used two coreless toroid coils to perform these kinds of measurements. In 2013, our research group started to perform a set of experiments using different coil combinations [
48], and combinations of coils and Hall sensors [
47] and to study the effect of water volume [
49]. Our previous conclusions suggested that the use of solenoid coils was as valid as the use of toroid coils. Only in [
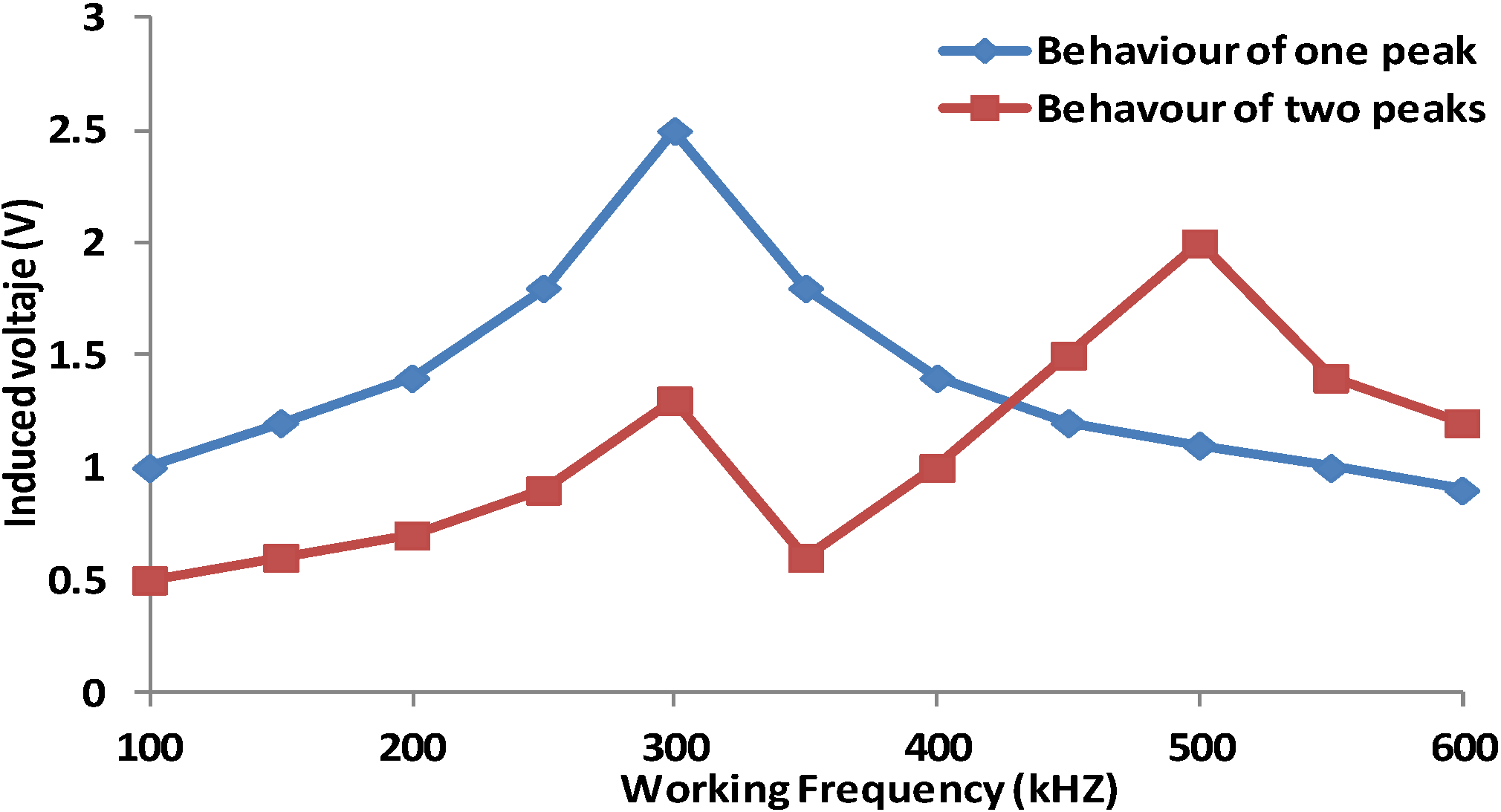
48] the authors evaluated the induced voltage at different frequencies with different prototypes.
With the aim of creating a specific and simply sensor for groundwater monitoring, in this paper, we continue our test with two solenoid coils.
Table 3 shows a summary of all the papers where the authors used conductivity sensors based on both methodologies. In this table, we compare the current sensors for conductivity monitoring. As we can see, only the inductive ones are able to operate in a measurable range that matches with the needs of groundwater monitoring from 1 mS/cm (or even less) to 57.9 mS/cm.
Table 3.
Summary of current sensors for electric current monitoring.
Table 3.
Summary of current sensors for electric current monitoring.
| Methodology | Sensor Description | Measurable Range (mS/cm) | Match with Measurable Needs | Publication Year | Ref. |
|---|
| Inductive | 2 Toroid | Same diameter | 1 to 44 | Possible | 2006 | [46] |
| Same diameter (1.125 inch) | 3 to 48 | No (To High) | 2010 | [45] |
| Same diameter (2.125 inch) | 0.45 to 3.4 | No (To Low) |
| Different diameter | 0.397 to 90.3 | Good | 2013 | [48] |
| Other | 2 Solenoids | 0.397 to 90.2 | Good |
| 1 Toroid and 1 Solenoid | 0.397 to 90.4 | Good |
| 1 Solenoid + sensor Hall | 0.0028 to 194 | Good | 2013 | [47] |
| 1 Toroid and 1 Solenoid | 0.397 to 76 | Good | 2013 | [49] |
| Conductive | H-bridge and digital potentiometer | 15.6 to 53.9 | No (To High) | 2010 | [51] |
| 4 Electrodes in a pipe | 0.5 to 6.5 | No (To Low) | 2008 | [52] |
| Interdigitate electrodes | 4 Electrodes in a pipe | 0.007 to 0.32 | No (To Low) | 2002 | [53] |
| 4 electrodes | 0.33 to 14.64 | No (To Low) | 2013 | [54] |
| 7 electrodes | 25 to 55 | No (To High) | 2011 | [55] |
| 4 models (40 and 63 electrodes) | 32 to 60 | No (To High) | 2011 | [56] |
| Several electrodes | 0.12 to 12 | No (To Low) | 2014 | [57] |
2.3. Background Theory
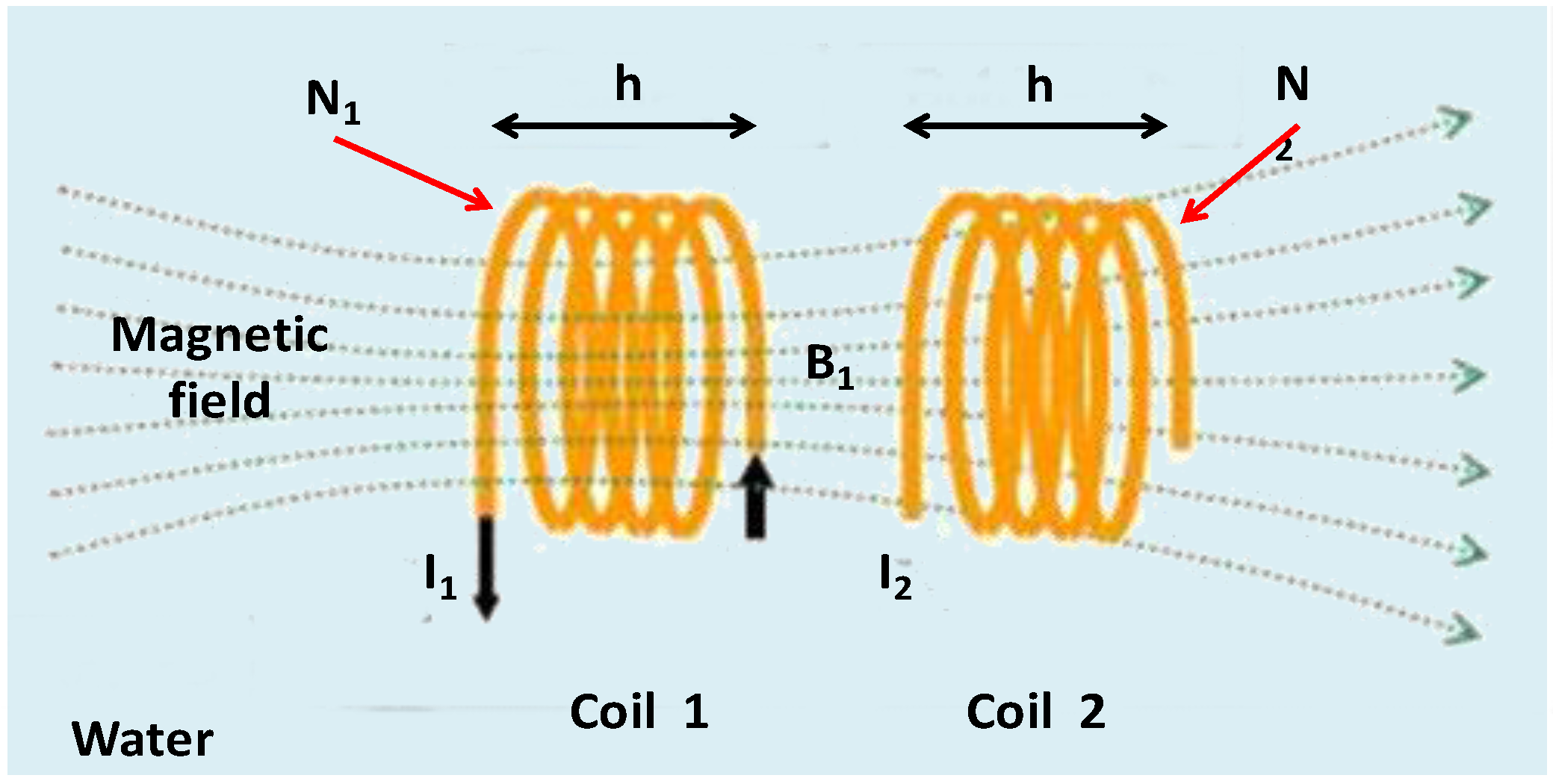
To understand the operation of our sensor, we need to understand the concept of mutual inductance. We are going to explain the how it works by using the scenario shown in
Figure 2. We have two coils with a length h, where
and
are the number of turns of each coil, respectively. Instead of having a ferromagnetic core with a section
and a relative permeability
. We have a space occupied by salt water where the section of the coils is
and the relative permeability
.
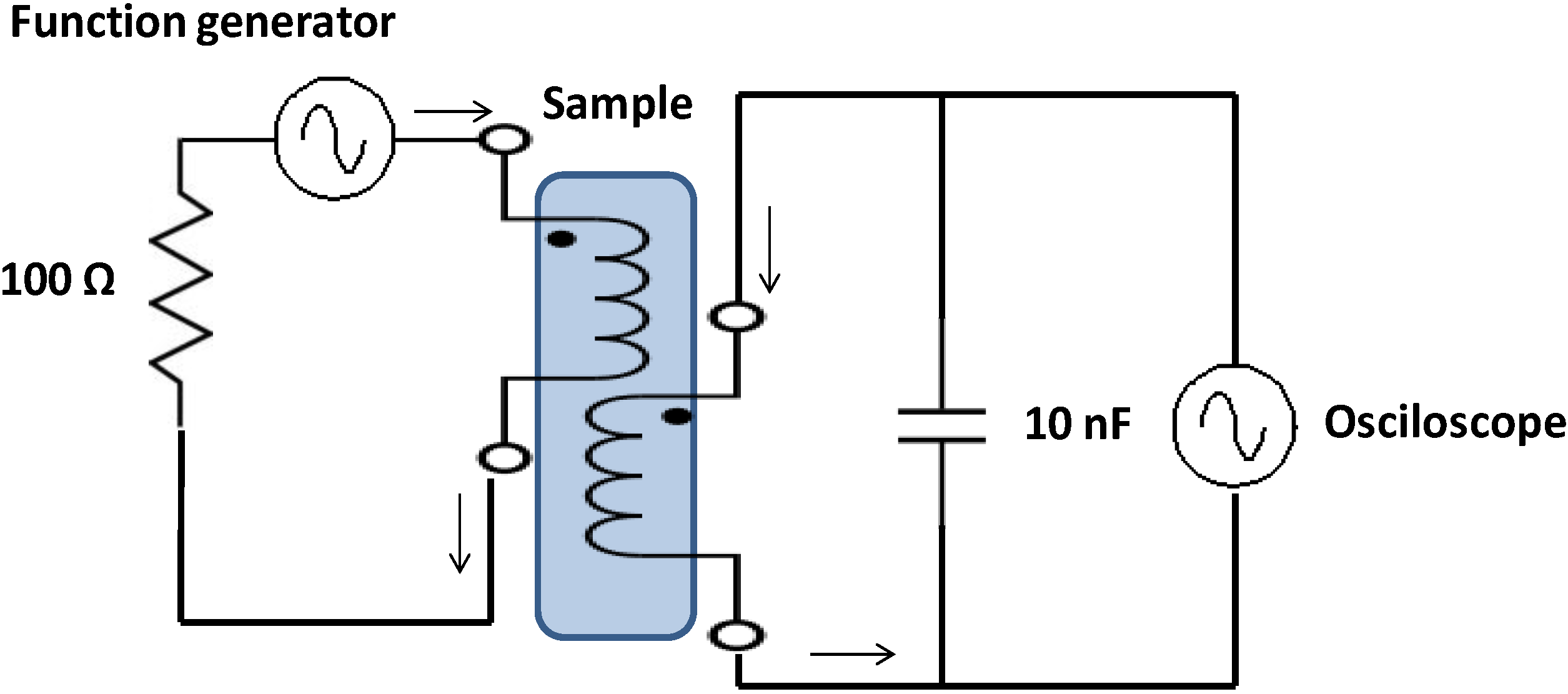
Figure 2.
Electric circuit of the sensor.
Figure 2.
Electric circuit of the sensor.
Throughout the coil 1 a constant current
flows, while the coil 2 is open. To simplify the equations system, let us assume that all lines of the magnetic field created by the coil 1 flow through the coil 2. Coil 1 creates a magnetic field
. This magnetic field is confined to the center of the coil 1, as if it were a core. In this way, the lines of the magnetic field
go through the coil 2 and create a magnetic flux
. The mutual inductance is shown in Equation (1):
On the other hand, the magnetic field in coil 1 is given by:
where
is unitary vector, parallel to the axis coils and it is directed to the right side. The flow produced on the coil 2,
, is shown in Equation (3):
Equation (4) shows the coefficient of mutual inductance:
On the other hand, the electromotive force in coil 2 (
) can be calculated from the magnetic flow produced on the coil 2 which is given by Equation (5):
If
depends on the time, this flow also changes as a function of the time and generates an
which is given by Equation (6):
where
is related with the working frequency of the induced
.
Finally, we can conclude that the
is related with the medium through the variable
which is related with the amount of salts dissolved in the water.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}