1. Introduction
For the past two decades, global positioning systems (GPS) has been widely used for precise positioning in various engineering and scientific fields. While its application areas in the early stage were limited to the determination of a position at a static environment, more and more applications which require kinematic positioning have been developed. For the kinematic GPS positioning, either single or multi-reference stations can be used for the data processing. The multi-reference station approach generally offers better positioning accuracy and reliability [
1,
2]. Therefore, the multi-reference station approach is recommended when precise kinematic positioning is required. However, many distance-dependent errors, such as atmospheric and ionospheric delays, are not fully removed through the double-differencing technique when the baseline length increases. Thus, these errors should be properly modeled for the medium to long range kinematic positioning [
3,
4,
5]. GPS kinematic positioning is usually performed by using the Kalman filter, and so called Position-Velocity (PV) model can be adopted when the object is assumed to move with a nearly constant velocity. In addition, Position-Velocity-Acceleration (PVA) model can be introduced for the cases where the near-constant velocity assumption does not hold [
6]. This means that the PVA model can provide not only the flexibility in estimation procedure but also the position, velocity, and kinematic acceleration of the moving object simultaneously.
It is notable that one of the popular applications utilizing the GPS derived acceleration is the airborne gravimetry. The airborne gravity survey is performed by measuring the kinematic accelerations of the aircraft using GPS. Then, the gravity information is extracted using the well-known equation as shown in Equation (1). The Equation (1) expressed in inertial frame shows that the kinematic accelerations consist of the gravitational acceleration and the specific force sensed by an accelerometer [
7,
8];
where
is kinematic acceleration;
is gravitational acceleration;
is specific force.
In general, the GPS measurements are processed in relative positioning mode to obtain accurate and reliable positioning results in 3-D space. Then, the kinematic accelerations are computed by taking second-order time-derivatives of positions [
9,
10]. This means that two steps of data processing are required to get the kinematic accelerations from the positions, which decrease the efficiency in a computational point of view. To overcome the drawback of this method, one can also use the PVA model approach so that the position, velocity, and acceleration of the aircraft can be determined at the same time. An efficient PVA model for Kalman filter is proposed and demonstrated using the measurements from the electronic tacheometer,
i.e., geodetic kinematic measurements [
11]. However, it should be noted that the experiments are conducted in an indoor environment, and the measurement used in the experiments are not from the GPS.
In this paper, the PVA model to directly determine not only the positions but also the kinematic accelerations is proposed, and the validation of the algorithm is demonstrated with in situ GPS measurements. The proposed algorithm is designed for the medium to long baseline scenario so that it can perform properly even in a survey for a large area under unfavorable surveying condition. The atmospheric effects such as tropospheric and ionospheric delays are modeled in the Kalman filter for the medium to long baseline scenario. In addition, multi-baseline approach is adopted for the improvement of the accuracy and reliability of the solutions. The algorithms are developed and numerical test are performed to validate the proposed algorithms by analyzing the positioning results and comparing the kinematic accelerations with those from the second-order time-derivatives of positions.
3. Results and Discussion
An airborne gravity survey was conducted in South Korea to develop a new geoid model in 2009. A Cessna Grand Caravan was used for the survey and it was flown with the help of autopilot at a constant altitude,
i.e., 10,000 feet, in order to get as smooth a flight as possible. The GPS data were collected from both the GPS receiver on board and six Continuously Operating Reference Station (CORS) with 1 s data interval.
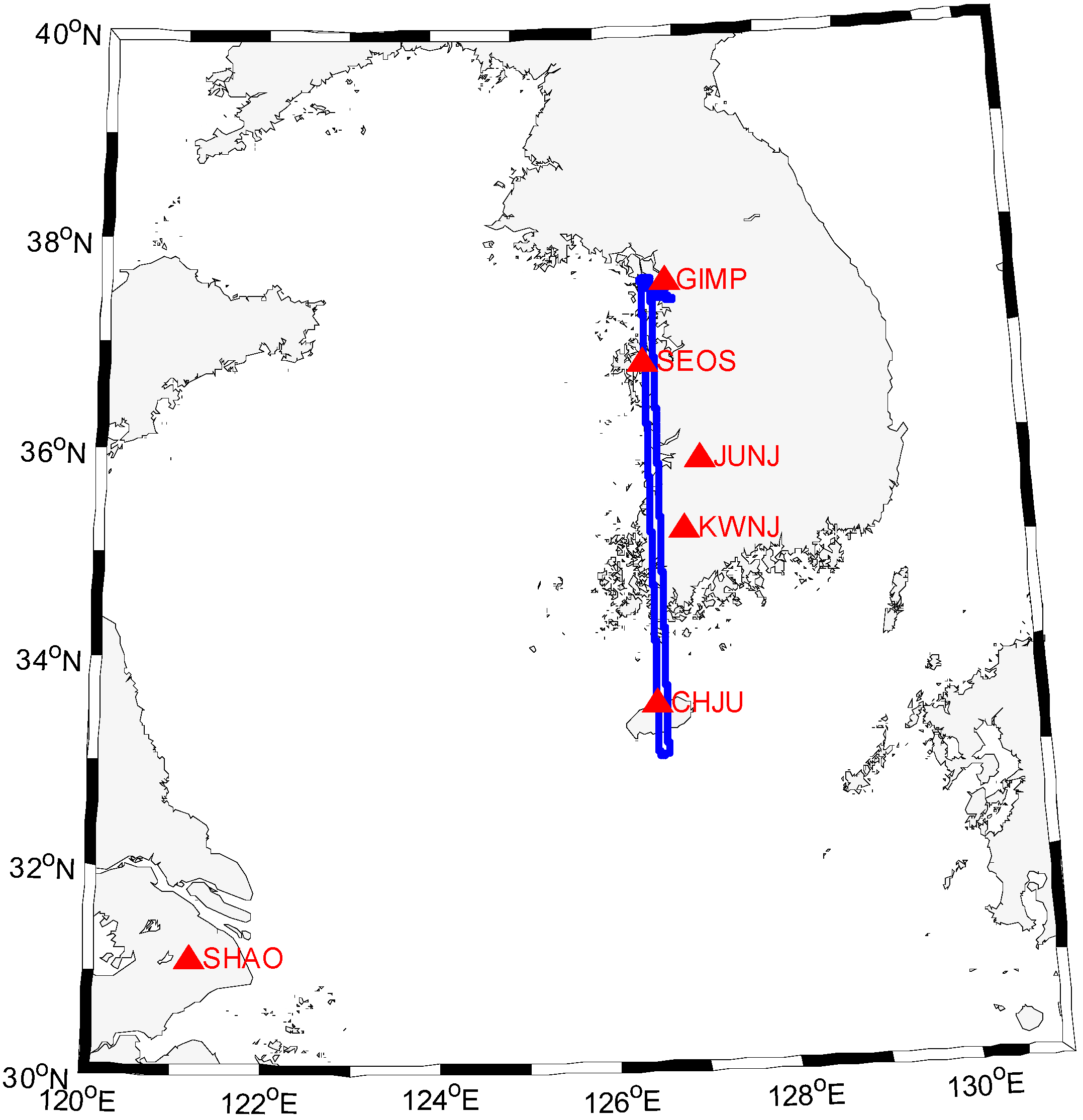
Figure 1 shows one of the trajectories of aircraft (blue line) and the locations of reference CORS used to demonstrate the proposed algorithm. The trajectories of the aircraft started and ended at the Gimpo (GIMP) airport and the total length of the aircraft trajectory is about 1200 km.
Figure 1.
Ground track of aircraft and locations of CORS.
Figure 1.
Ground track of aircraft and locations of CORS.
The coordinates of the reference stations in ITRF2005 frame are determined using the BERNESE GPS data processing software [
20], and the results are shown in
Table 1. The coordinates of reference stations are tightly constrained by assigning very small variance values (
i.e., 1 × 10
−10 m
2) to the initial covariance matrix.
For the medium to long baseline data processing scenario, the SHAO reference station is included in the data processing. Hence, the diameter of the CORS GPS network reaches up to approximately 900 km. The GPS data was collected on 11 January 2009 and the data span was 4 h and 18 min.
Table 1.
ITRF2000 Cartesian coordinates for continuously operating reference station (CORS) (unit: m).
Table 1.
ITRF2000 Cartesian coordinates for continuously operating reference station (CORS) (unit: m).
| Station Name | X | Y | Z |
|---|
| GIMP | −3031,894.828 | 4054,598.988 | 3866,287.717 |
| SEOS | −3042,060.369 | 4111,978.757 | 3797,578.729 |
| JUNJ | −3124,886.919 | 4126,580.526 | 3714,170.141 |
| KWNJ | −3134,404.485 | 4173,081.827 | 3654,100.961 |
| CHJU | −3168,622.305 | 4277,489.565 | 3501,650.004 |
| SHAO | −2831,733.444 | 4675,665.953 | 3275,369.395 |
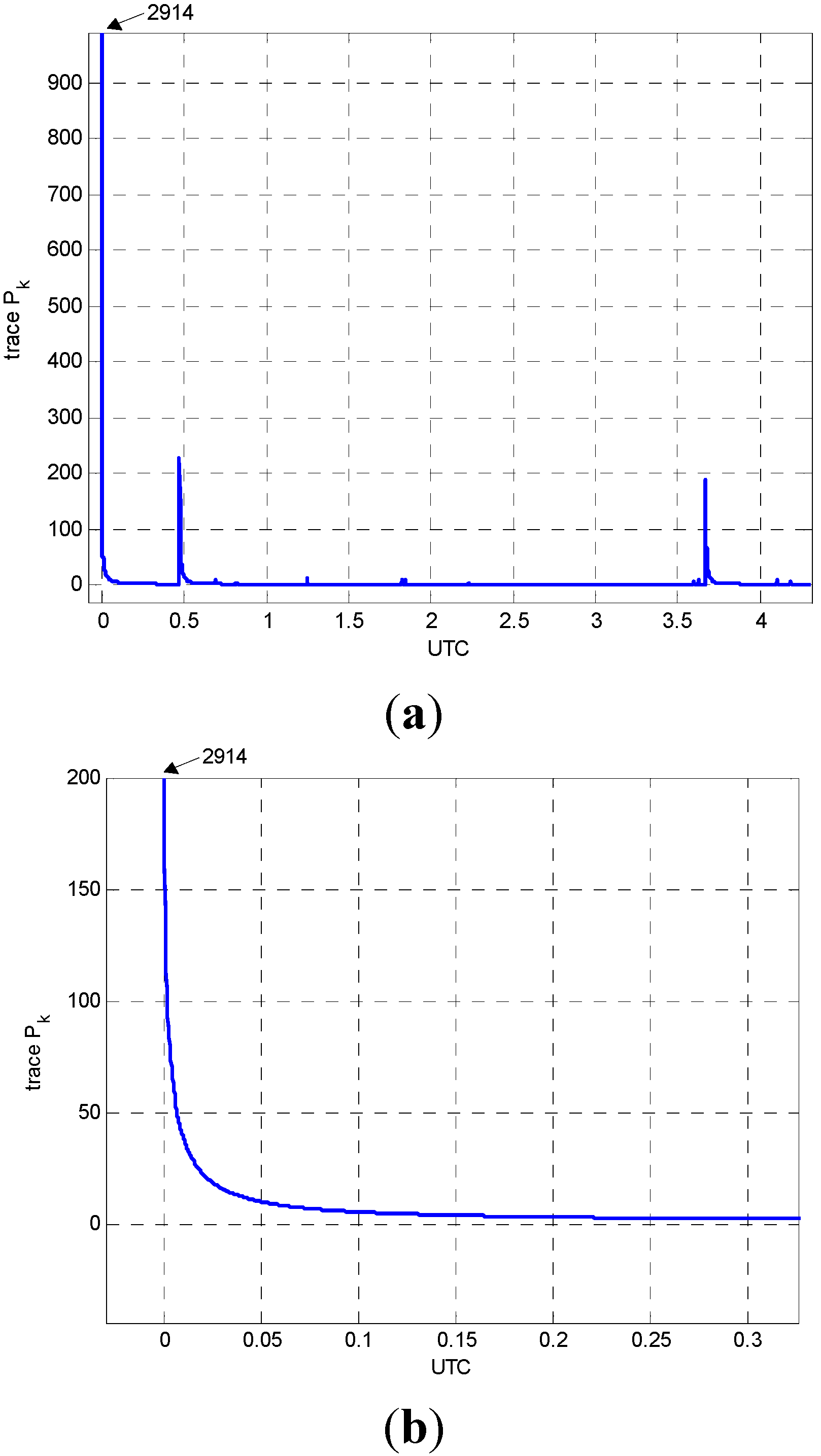
As described in
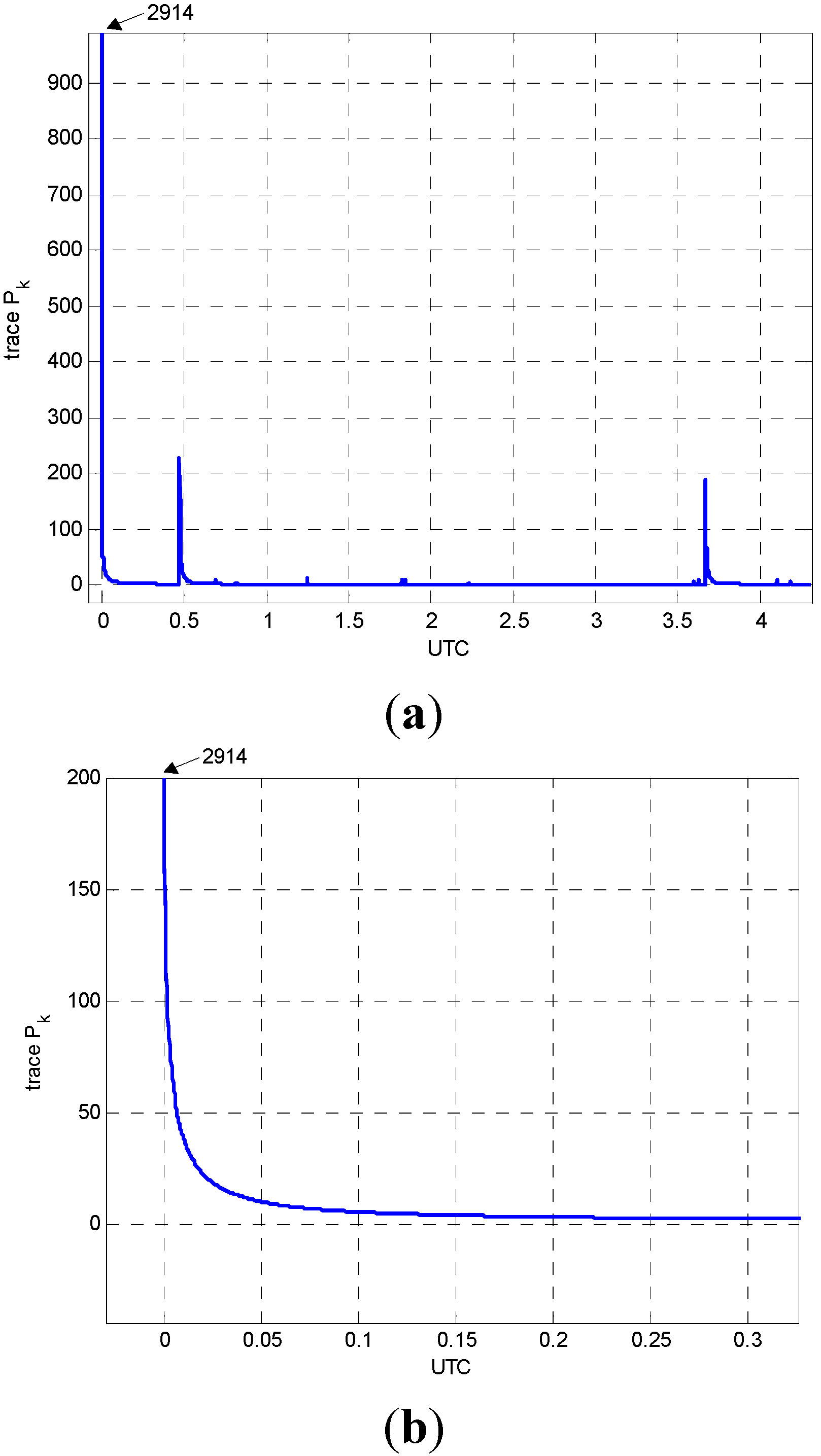
Section 2, the kinematic accelerations together with positions and velocities are estimated through the Kalman filter approach. The multi-baseline data processing is performed with radial type of network configuration. To evaluate the filter efficiency, the convergence of the covariance matrix P
k is examined.
Figure 2a presents the variations of the trace of P
k with respect to time. As shown in
Figure 2a, the trace of P
k converges rapidly with respect to time, which indicates the reliability of the filter. It is also notable that two peaks in
Figure 2a correspond to the epochs at which new satellites are observed. Then, new states for DD ionospheric delays and ambiguities are included in state vector, and predefined variance values,
i.e., (0.5 m)
2 for DD ionospheric delay and 1 × 10
10 for DD ambiguity, are assigned to the new states.
Figure 2.
Convergence of the covariance matrix, Pk: (a) whole trajectory; (b) beginning part of the trejectory.
Figure 2.
Convergence of the covariance matrix, Pk: (a) whole trajectory; (b) beginning part of the trejectory.
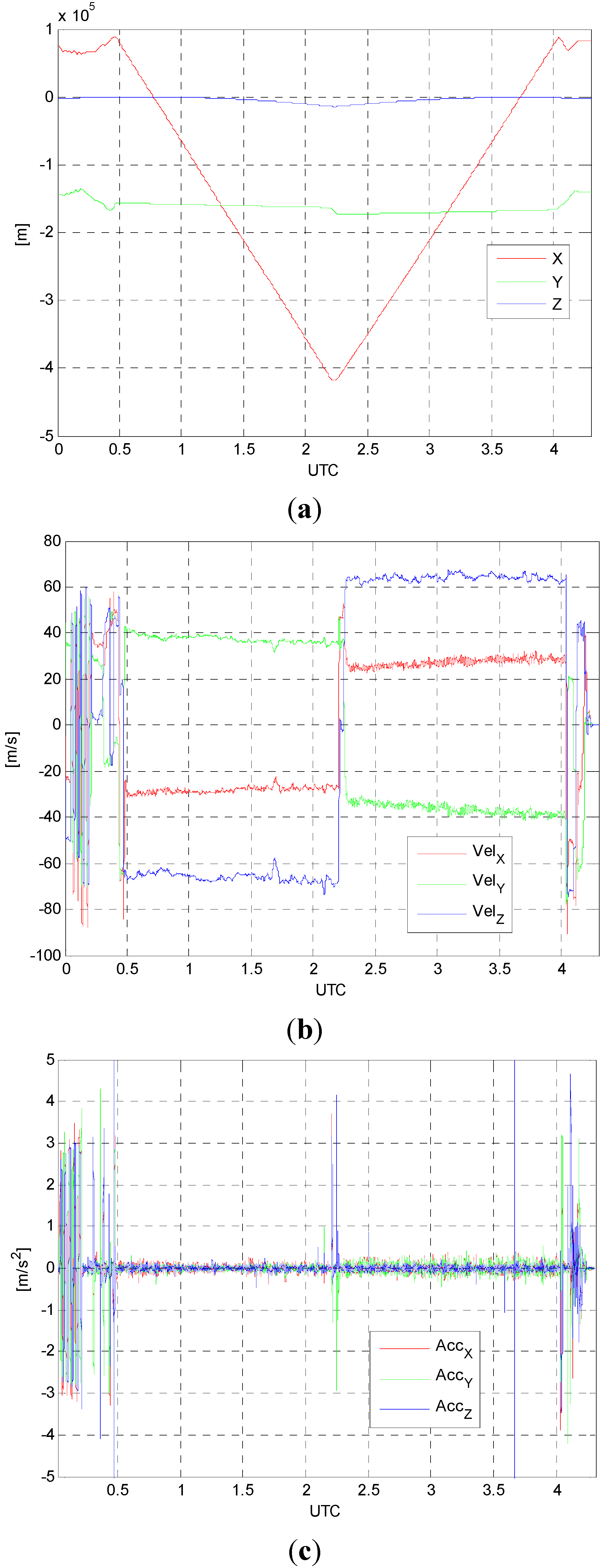
Figure 3a–c present the estimated positions, velocities and accelerations of the aircraft with respect to time, respectively. The estimated states are the results from forward-backward smoothing.
Figure 3.
(a) Positions; (b) velocities; (c) accelerations.
Figure 3.
(a) Positions; (b) velocities; (c) accelerations.
As shown in
Figure 3b, the constant velocities in most of the data span for airborne gravity survey are retained. The peaks observed in
Figure 3c correspond to the aircraft maneuvering for takeoff, turnaround, and landing.
Table 2 shows the statistics of the estimated accelerations which ranges from about −4.5 m/s
2 to 4.5 m/s
2.
Table 2.
Statistical characteristics of estimated accelerations (unit: m/s2).
Table 2.
Statistical characteristics of estimated accelerations (unit: m/s2).
| | | | |
|---|
| Min. | −3.92 | −4.18 | −4.62 |
| Max. | 3.75 | 4.34 | 4.49 |
| Std. | 0.53 | 0.51 | 0.52 |
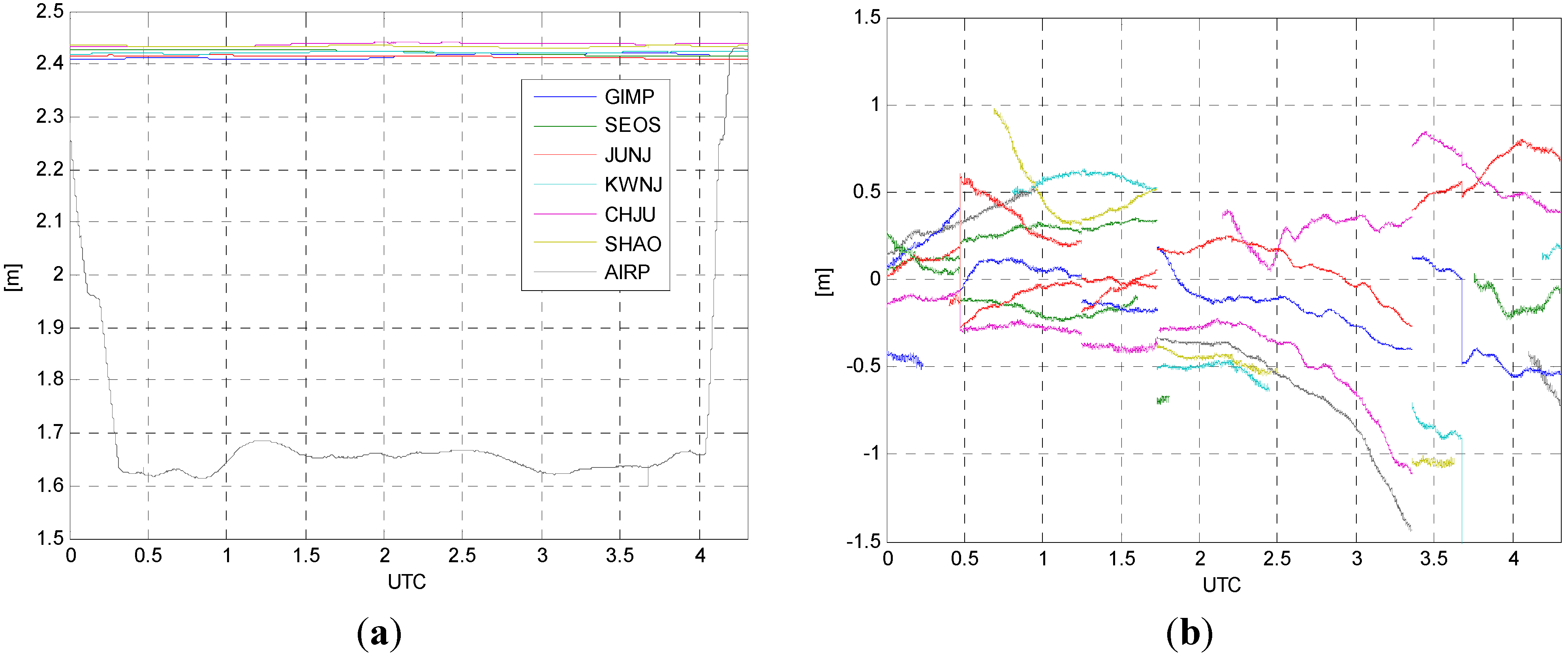
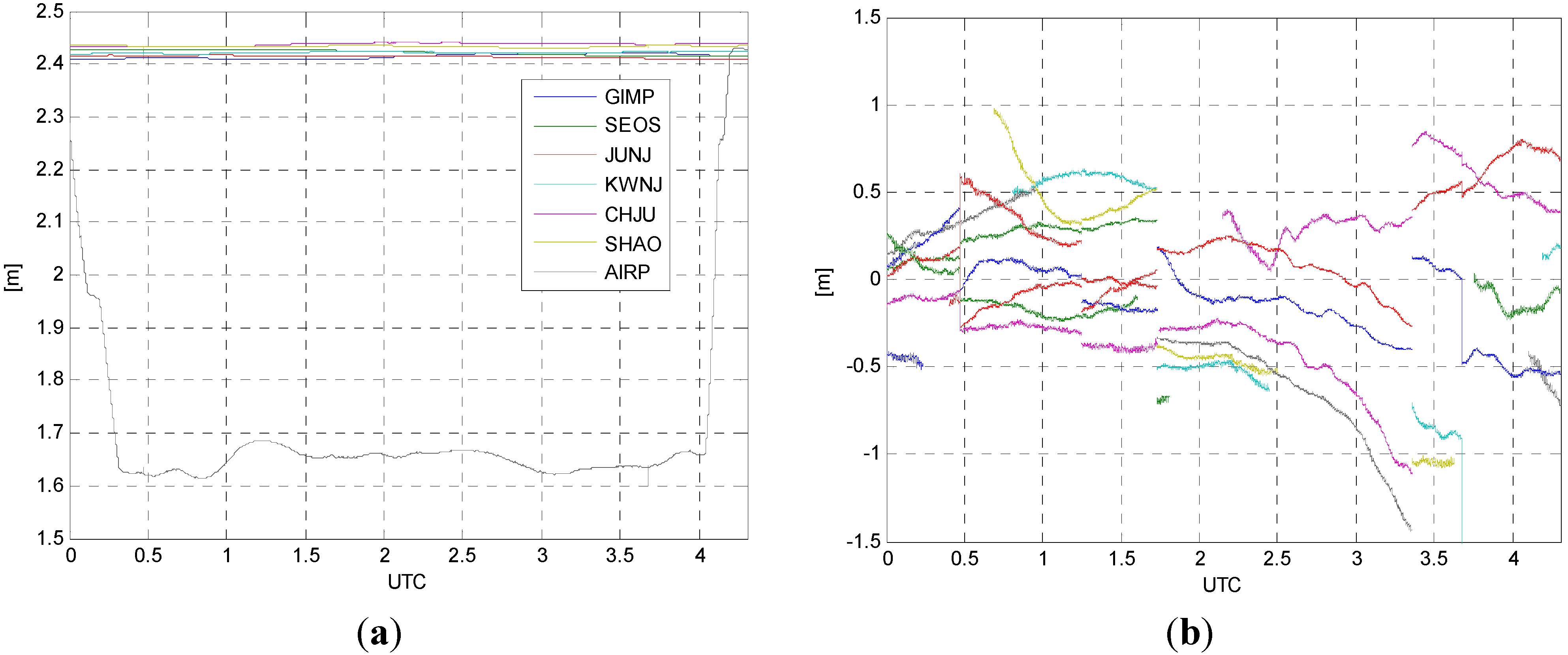
The atmospheric effects are estimated in forms of ZWD residuals and DD ionospheric delays, respectively. As explained in
Section 2, the ZWD residuals are estimated at each station including the aircraft and then final TZDs are computed by adding the modeled values to the estimated ZWD residuals.
Figure 4a shows the final TZDs obtained from the data processing. As shown in
Figure 4a, no significant variations of TZDs for the reference stations are observed while abrupt changes in the magnitude of values can be seen in the TZD estimated from the aircraft. This is caused by the fact that the modeled values are highly depended on the altitude of the aircraft. The DD ionospheric delays are also computed for each of the baseline and satellite pairs, and one example of the results for SHAO-AIRP baseline is shown in
Figure 4b. Each continuous line corresponds to the DD ionospheric delay for each pair of GPS satellites. The variation of the DD ionospheric delays ranges from about −1 m to 1 m.
Figure 4.
(a) Total zenith delays (TZDs); (b) DD ionospheric delays for SHAO-AIRP baseline.
Figure 4.
(a) Total zenith delays (TZDs); (b) DD ionospheric delays for SHAO-AIRP baseline.
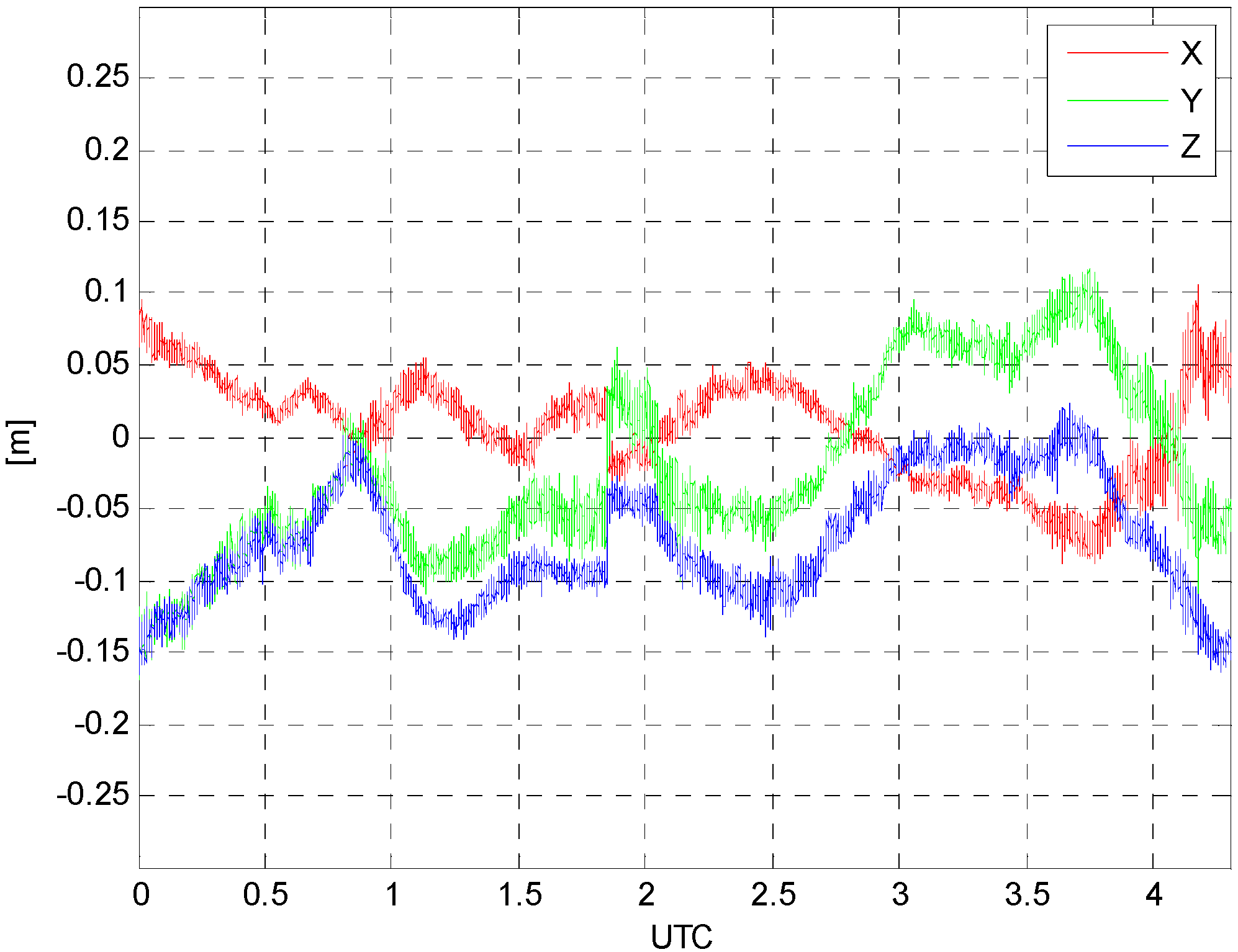
The next step is to evaluate the quality of the estimated kinematic accelerations once all the solutions are obtained through the proposed algorithm. However, there is a limitation on direct comparison because the reference values for kinematic accelerations are not available. Therefore, the coordinates of aircraft are computed using the same GPS datasets with the commercial software called Waypoint
®, and the computed coordinates are used as reference values for the evaluation.
Figure 5 presents the differences between the estimated coordinates using the proposed method and the reference values from the Waypoint software. The differences between the two solutions range from about −0.15 m to 0.1 m as shown in
Table 3. From the results, one can conclude that the filter based on the proposed algorithm is working properly.
Figure 5.
Differences between the estimated coordinates and reference values.
Figure 5.
Differences between the estimated coordinates and reference values.
Table 3.
Statistical characteristics of the differences between the estimated coordinates and the reference values (unit: m).
Table 3.
Statistical characteristics of the differences between the estimated coordinates and the reference values (unit: m).
| | | | |
|---|
| Min. | −0.09 | −0.17 | −0.17 |
| Max. | 0.11 | 0.11 | 0.02 |
| Std. | 0.04 | 0.06 | 0.04 |
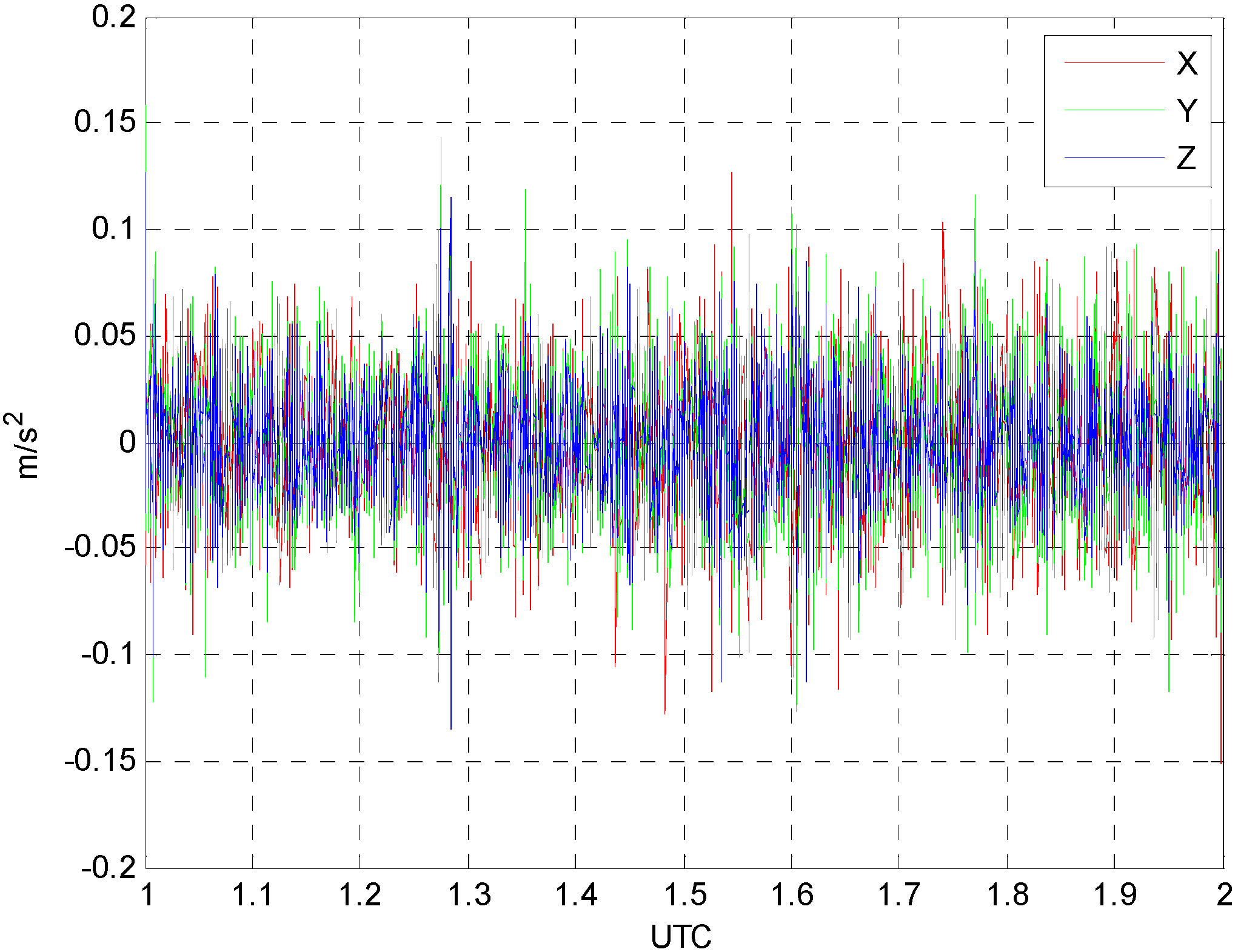
Then, the second-order time-derivatives of determined positions are applied to obtain the kinematic accelerations. It should be mentioned that taking the time-derivatives is performed after the data fitting with B-spline function. In the final step, the differences between the two kinematic accelerations are computed as shown in
Figure 6. This procedure is applied to only 1 h data span,
i.e., 1–2 h (UTC) because no significant dynamics of the aircraft is observed. This also indicates that the actual gravity survey is performed during that time span.
Table 4 shows the statistical characteristics of the differences between the estimated kinematic accelerations and the reference values. The differences between the two solutions range from −0.15 m/s
2 to 0.16 m/s
2 and the standard deviation of the differences is about 0.03 m/s
2. The mean value of the differences is 10
−5 m/s
2 level for each component.
From the results, one can state that the comparable kinematic accelerations for airborne gravity survey can be obtained by using the proposed algorithmIt should be mentioned that the kinematic acceleration for airborne gravimetry needs the accuracy at least at the level of 10−4 m/s2 to detect the gravity signal at the level of 10 mGal. In airborne gravimetry, however, a smoother is applied to the acceleration to extract meaningful gravity signal. Although the extraction of the gravity signal is out of the scope in this study, a B-spline smoother with window size of 120 s are applied to both accelerations and verified that the differences reside at the level of 10−4 m/s2. Therefore, one can conclude that the proposed algorithm is reliable for the application of kinematic accelerations. The validation for the proposed algorithm in this study, however, is performed with the dataset of one trajectory collected under the relatively low dynamic conditions. Therefore, it might be necessary to process more dataset under the high dynamic environments in the future.
Figure 6.
Differences between the estimated kinematic accelerations and reference values.
Figure 6.
Differences between the estimated kinematic accelerations and reference values.
Table 4.
Statistical characteristics of the differences between the estimated kinematic accelerations and the reference values (unit: m/s2).
Table 4.
Statistical characteristics of the differences between the estimated kinematic accelerations and the reference values (unit: m/s2).
| | | | |
|---|
| Min. | −0.15 | −0.13 | −0.14 |
| Max. | 0.13 | 0.16 | 0.13 |
| Std. | 0.03 | 0.03 | 0.02 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}