1. Introduction
Integration of GPS/INS is a popular tool for positioning due to their complementary error characteristics and has been widely studied for several decades [
1]. The integrated system can be relied on to provide accurate and continuous position, velocity and attitude information in harsh environments. The overall performance of the integrated system heavily depends upon the availability and quality of GPS measurements which are used to calibrate inertial sensor errors [
2]. The satellite-based positioning system can provide centimeter-level positioning accuracy by processing carrier phase measurements in differential mode, however it is a challenge to fix the integer ambiguities instantaneously with a long baseline (normally over 20 km) due to the fact atmospheric effects are hard to eliminate by double differencing, so it is popular to utilize the network real time kinematic (RTK) technique to cancel out the distance dependent error terms [
3]. On the other hand, the GPS/INS integrated system has become a primary tool for the applications requiring high accuracy such as, e.g., Mobile Mapping System (MMS) and Airborne Mapping [
4,
5,
6], which require rapid and accurate on-the-fly integer ambiguity resolution to achieve a few centimeters’ accuracy in positioning [
7,
8,
9]. In order to improve the AR efficiency, the auxiliary measurements from INS are used to reduce the search space, which results in a significant improvement in ambiguity resolution in GPS-challenged areas [
2,
10], and the remaining GPS atmospheric errors can be estimated as additional unknowns in the integration system, thus extending the applicability of the GPS/INS integration system to long baseline navigation applications. However, the AR performance of kinematic positioning degrades significantly in constrained environments, such as unban environments with frequent signal blockage or when the low elevation multipath interference is significant, and the AR reliability relies highly on correct stochastic models for GNSS measurements, so it is not easy to model the GNSS observation noise, especially for kinematic applications as the vehicle maneuvers may affect the observation noise, resulting in inaccurate stochastic models for GPS and BDS combined measurements that inevitably result in biased solutions and deteriorated AR performance [
11,
12]. This contribution aims to improve the AR performance and associated algorithms to achieve more precise and reliable solutions.
GPS can provide continuous, accurate navigation information in open-sky conditions with more than four satellites, however its accuracy and availability degrades significantly in the presence of signal blockage and multipath interference. To improve the GPS satellite availability, it is practical to add a new GNSS to the existing system. The Chinese BeiDou Navigation Satellite System came on-line to provide positioning, navigation and timing services in the Asia-Pacific region in December 2012 [
13]. A lot of research has been conducted to evaluate the positioning performance of BeiDou, including relative positioning [
14,
15,
16,
17], precise point positioning [
18,
19] and orbit determination [
20,
21]. The obtained results are very promising and of importance to the development of the BDS. This research will integrate GPS, BDS and INS to improve the solution availability, accuracy and reliability. It is expected that AR performance will be significantly improved by the inclusion of BDS, thus the applicability of the integrated navigation system for seamless navigation will be increased.
The main limitation of INS is rapid navigation accuracy deterioration due to the uncompensated sensor errors, as the positioning performance for standalone INS is strongly dependent on the quality of inertial measurement unit (IMU) sensors [
22]. In the past researchers have investigated the navigation performance of the high-end INS [
23], but the use of high-end inertial sensors is limited due to their high prices. With the rapid progress in MEMS-based IMUs during the last few years, the sensor performance has been improved and the cost has been reduced substantially. The integration of GPS and MEMS IMUs has been widely and successfully applied in vehicular navigation applications [
24,
25,
26,
27]. This research will evaluate the bridging capability of MEMS-based INS and its enhancement in aiding GNSS ambiguity resolution.
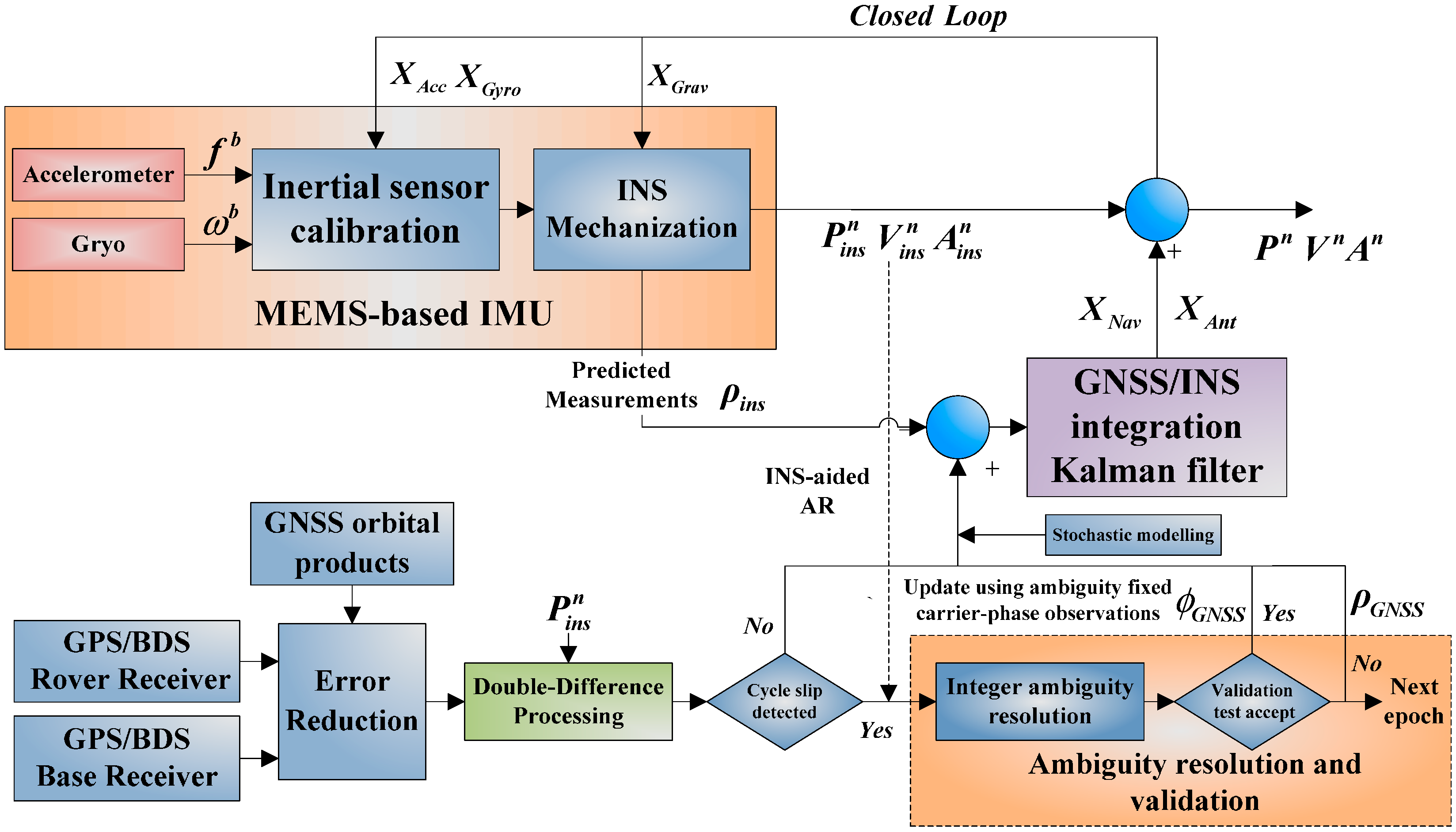
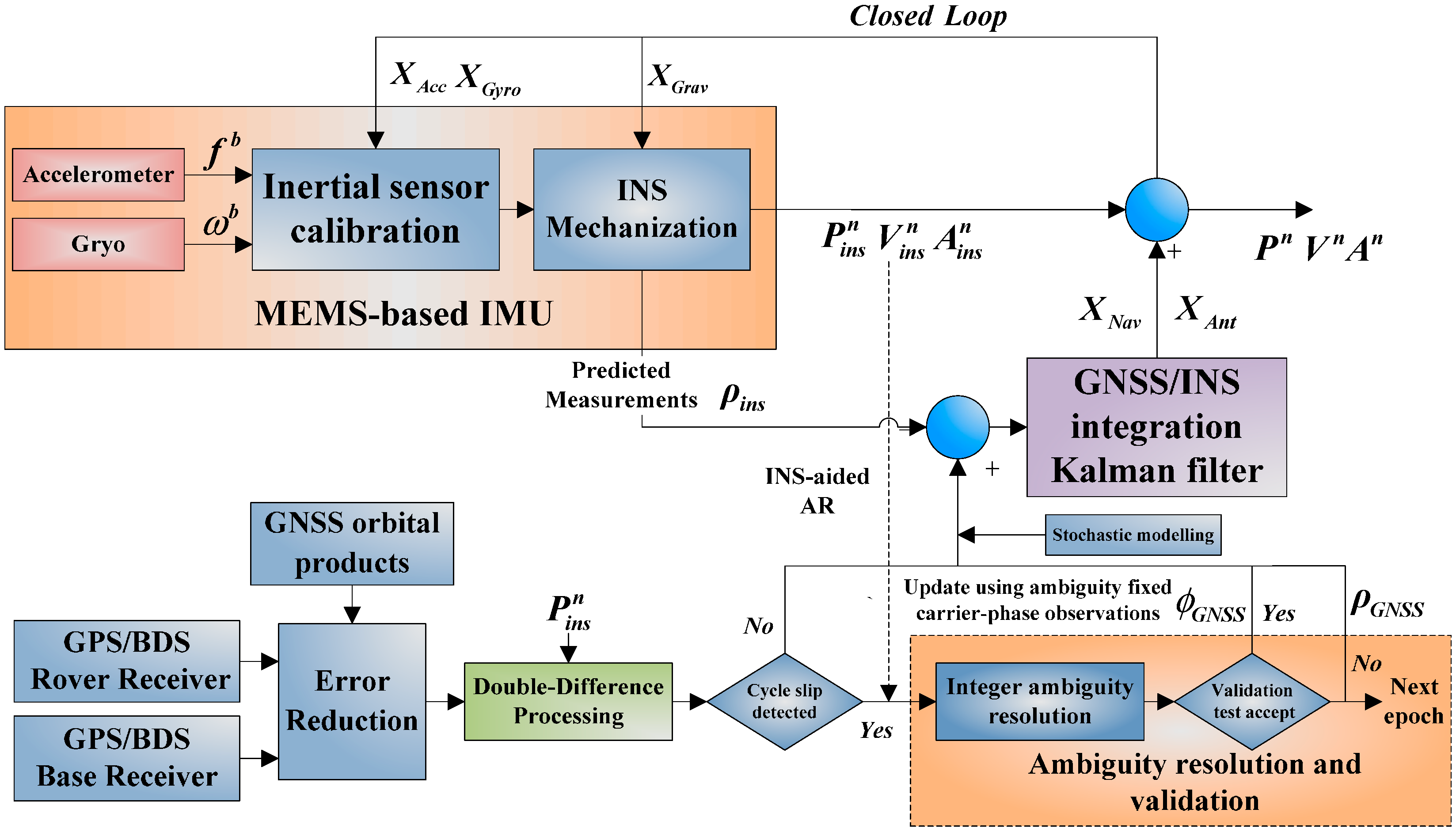
The integration of GPS/BDS/INS can be implemented using a Kalman filter in either loosely, tightly or ultra-tightly mode. A tightly coupled integration scheme using GPS/BDS code and carrier phase measurements is implemented in this paper, which is considered to offer an advanced performance respect to the loosely coupled mode, the navigation states, sensor error states and other unknown parameters of interest are precisely estimated in the hybrid filter. In this contribution, single epoch AR performance and positioning accuracy of the GPS/BDS/INS combined system in kinematic positioning situation are evaluated. We first evaluate the effects of satellite availability improvement on AR efficiency and positioning accuracy by adding BDS. The successful and reliable AR requires precise float solutions, as bad precision of initial positions will degrade the AR performance, thus an INS aiding strategy is implemented which brings in a strong a priori constraint into the ambiguity search space to obtain a more reliable ambiguity fix. The improvement in resolving ambiguities that INS aiding brings to the combined system has not been evaluated in previous researches. A two-step ambiguity fixing strategy using wide-lane observations, L1 and L2 observations are applied sequentially to further improve the AR performance. In order to avoid the degradation that low-elevation multipath-contaminated observations brings to AR, an adaptive multipath factor-based modelling scheme is employed, which can lead to an improvement in the AR success rate.
The rest of this paper is organized as follows: in
Section 2, the INS error model and measurement model for the TC GPS/BDS/INS integration system are briefly described.
Section 3 presents the INS- aided integer ambiguity resolution method. In
Section 4, the implementation of the proposed TC integration system is presented.
Section 5 demonstrates the positioning performance of various integration configurations. The conclusions are presented in
Section 6.
5. Results and Discussion
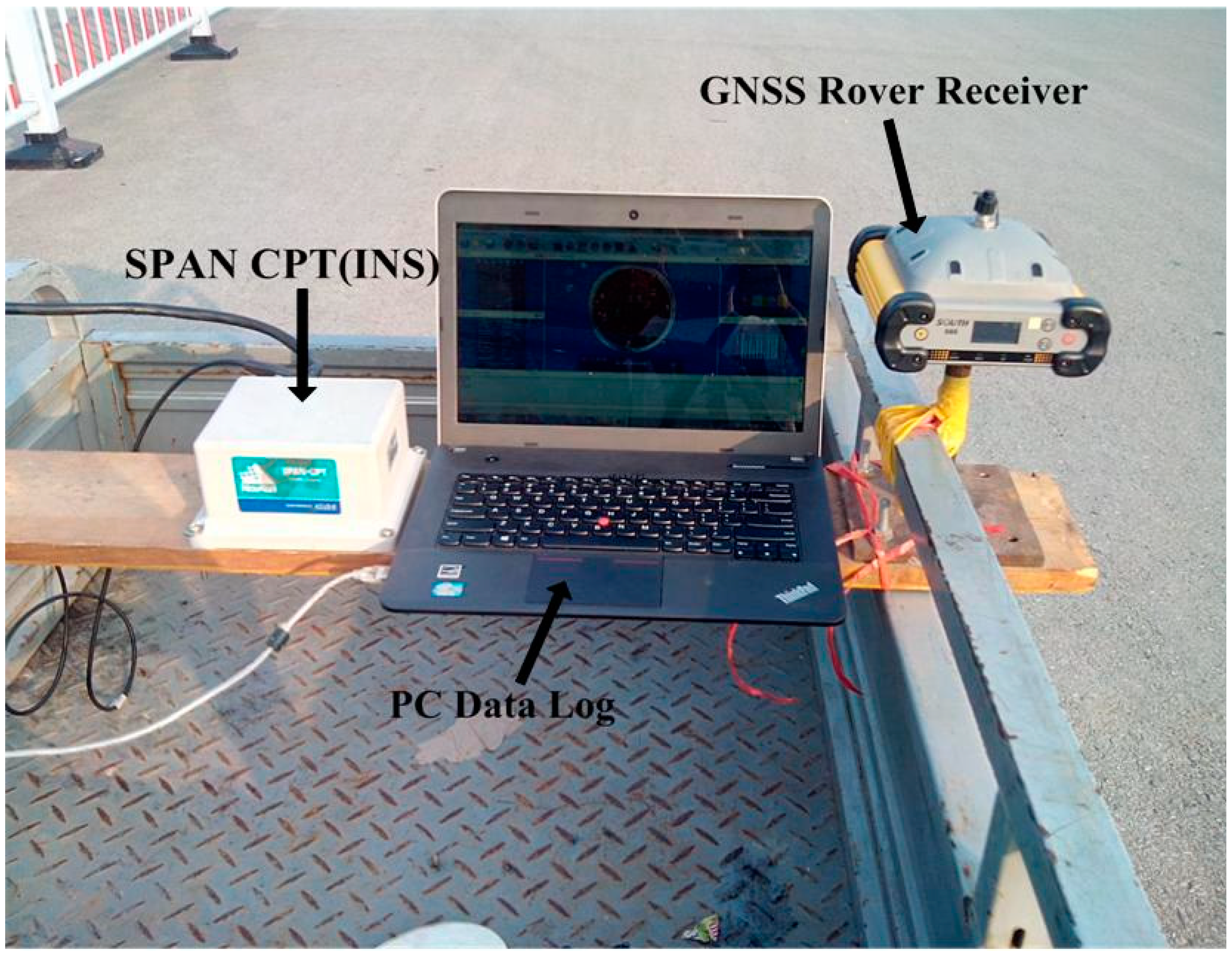
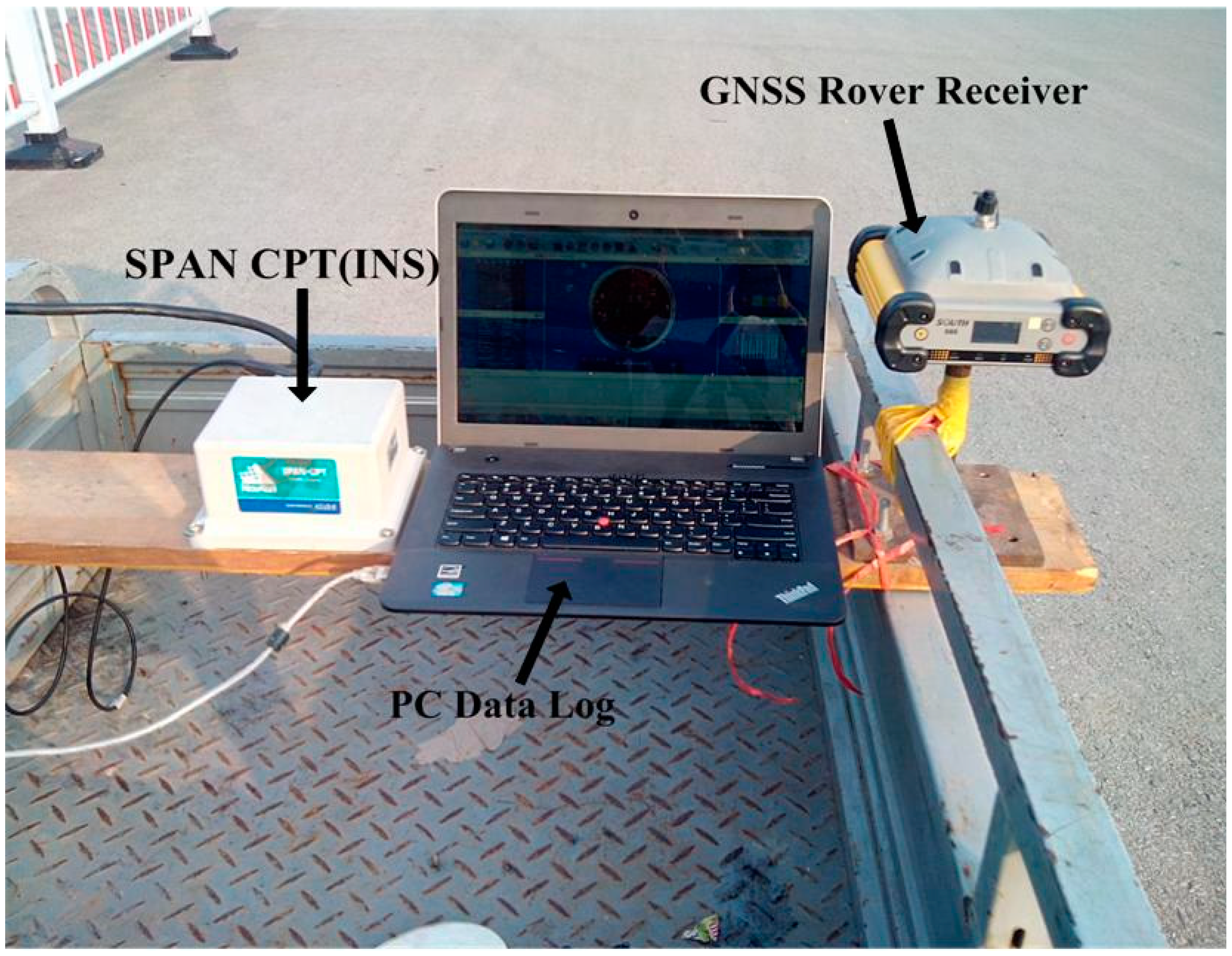
A field vehicular test was carried out to evaluate the performance of the developed GPS/BDS/MEMS-based tightly coupled system. The test area is a typical area characterized by foliage and a lake, so the satellite positioning performance is limited because of signal blocking and multipath problems. The integrated navigation system consists of a SPAN-CPT system, which is an integrated navigation system consisting of a MEMS-based IMU (whose specifications are shown in
Table 1) and a NovAtel OEM4 receiver, and a dual-frequency SOUTH GPS/BDS receiver fixed on a vehicle driving at a low speed (
Figure 3). Another same receiver set up as the reference station was mounted on the roof of the School of Environmental Science and Spatial Informatics (SESSI) building, on the campus of China University of Mining and Technology (CUMT), Xuzhou, Jiangsu, China, the baseline separation was less than 5 km.
Figure 3.
Testing platform.
Figure 3.
Testing platform.
Table 1.
IMU sensor specifications.
Table 1.
IMU sensor specifications.
| Gyro | Accelerometer |
|---|
| Bias Offset | ±20°/h | Bias Offset | ±50 mg |
| Bias Repeatability | ±3°/h | Bias Repeatability | ±0.75 mg |
| In Run Stability | 1°/h (1σ) | In Run Stability | 0.25 mg (1σ) |
| Scale Factor Stability | 1500 ppm | Scale Factor Stability | 4000 ppm |
| Angular Random Walk | 0.0667°/√h | Velocity Random Walk | 55 mg/√Hz |
The raw carrier phase and pseudorange data were collected at a 1 Hz rate, the IMU raw measurements were recorded at a sampling rate of 100 Hz. The test duration was approximately 72 min and the test trajectory is shown in
Figure 4.
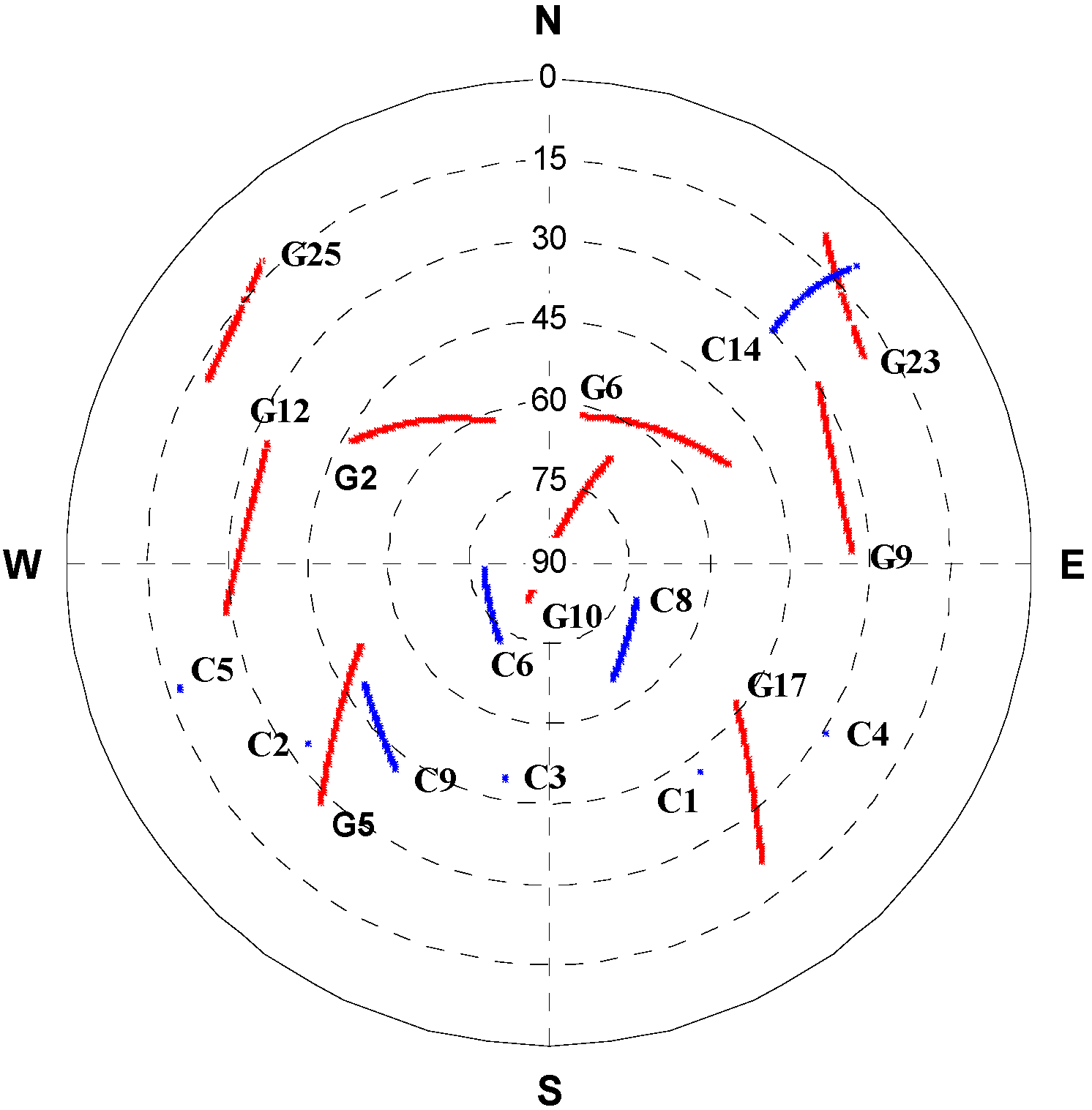
Figure 5 shows satellite positions in the sky relative to current vehicle position.
Figure 4 shows nine BeiDou satellites were visible during the test, including five GEO satellites (PRN 1, 2, 3, 4, 5), three IGSO satellites (PRN 6, 8, 9) and one MEO satellite (PRN 14), while three other MEO satellites were invisible during the navigation period. It is obvious the GNSS solution availability is improved by including the BeiDou observations, especially in harsh environments; the positioning performance is degraded for standalone GPS due to the weak satellite geometry configuration when the vehicle operated under foliage (marked by a red circle in
Figure 4).
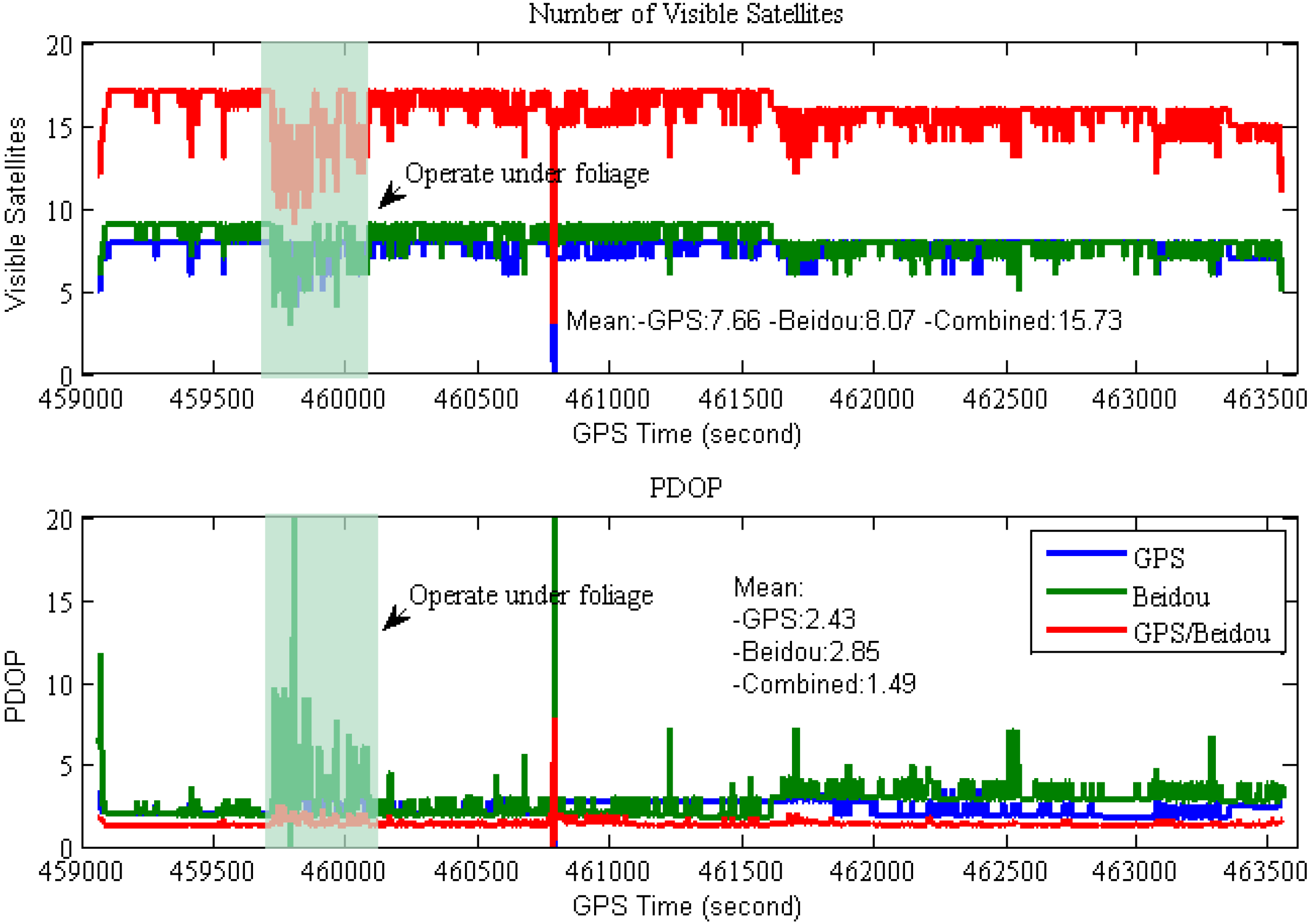
The satellite visibility and PDOP variations are shown in
Figure 6. From this figure, one can find the number of tracked GPS and BDS satellites at 15° cut-off elevation is larger than ten, except when the vehicle drove under dense foliage or signal lock-lose occurred, which implies the availability of high-precision solution will increase significantly when GPS and BDS are combined, and it shows the PDOPs of the combined GPS/BDS system are less than 2 most of the time, which indicates better positioning performance can be achieved for the combined system when compared with that of single system.
Figure 4.
Field test trajectory (vehicle operated under foliage in the area marked by a red circle).
Figure 4.
Field test trajectory (vehicle operated under foliage in the area marked by a red circle).
Figure 5.
Sky plots of GPS/BeiDou satellites during the field test.
Figure 5.
Sky plots of GPS/BeiDou satellites during the field test.
Figure 6.
Satellites visibility and PDOP during the field test (15° cut-off elevation).
Figure 6.
Satellites visibility and PDOP during the field test (15° cut-off elevation).
During our test, more BDS satellites are visible compared to the GPS one during most of the time period, however the BDS PDOPs are slightly worse than those of GPS-only case due to the current BDS geometry configuration deficiency. The mean EDOP, NDOP, HDOP, VDOP and PDOP for the GPS/BDS combined system are also illustrated in
Table 2, it clearly shows that the geometric strength is significantly improved for the combined system. The mean NDOP and VDOP are obviously worse than EDOP for both GPS-only and BDS-only case, besides the BeiDou’s NDOPs are obviously larger than those of GPS-only, whereas the EDOPs and VDOPs are comparable to those of GPS-only case.
Table 2.
Mean DOP for the GPS/BDS combined system during the field test (15° cut-off elevation).
Table 2.
Mean DOP for the GPS/BDS combined system during the field test (15° cut-off elevation).
| Configuration | EDOP | NDOP | HDOP | VDOP | PDOP |
|---|
| GPS | 0.66 | 1.03 | 1.23 | 2.10 | 2.43 |
| BDS | 0.76 | 1.76 | 1.96 | 2.06 | 2.85 |
| GPS/BDS | 0.47 | 0.62 | 0.80 | 1.27 | 1.49 |
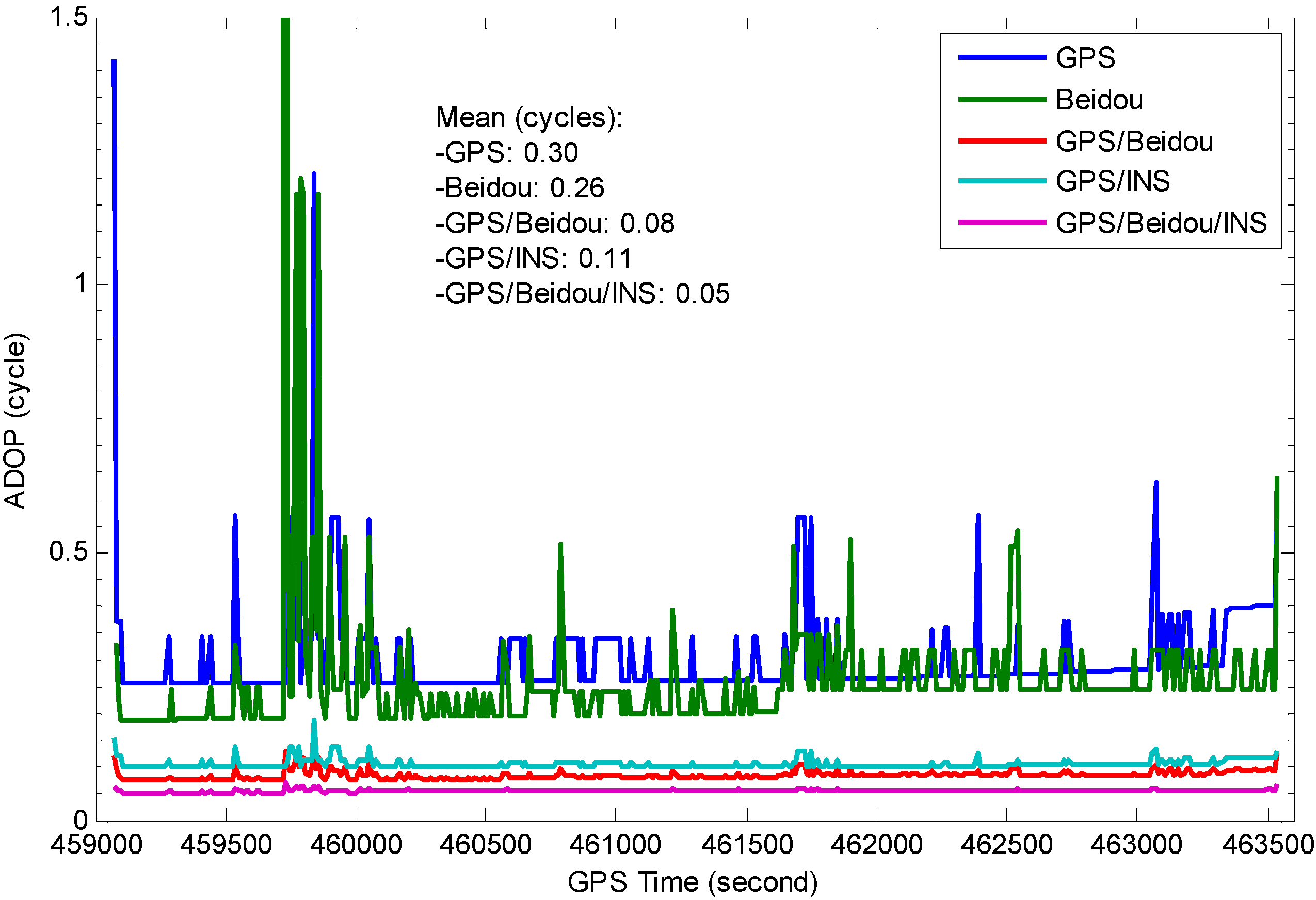
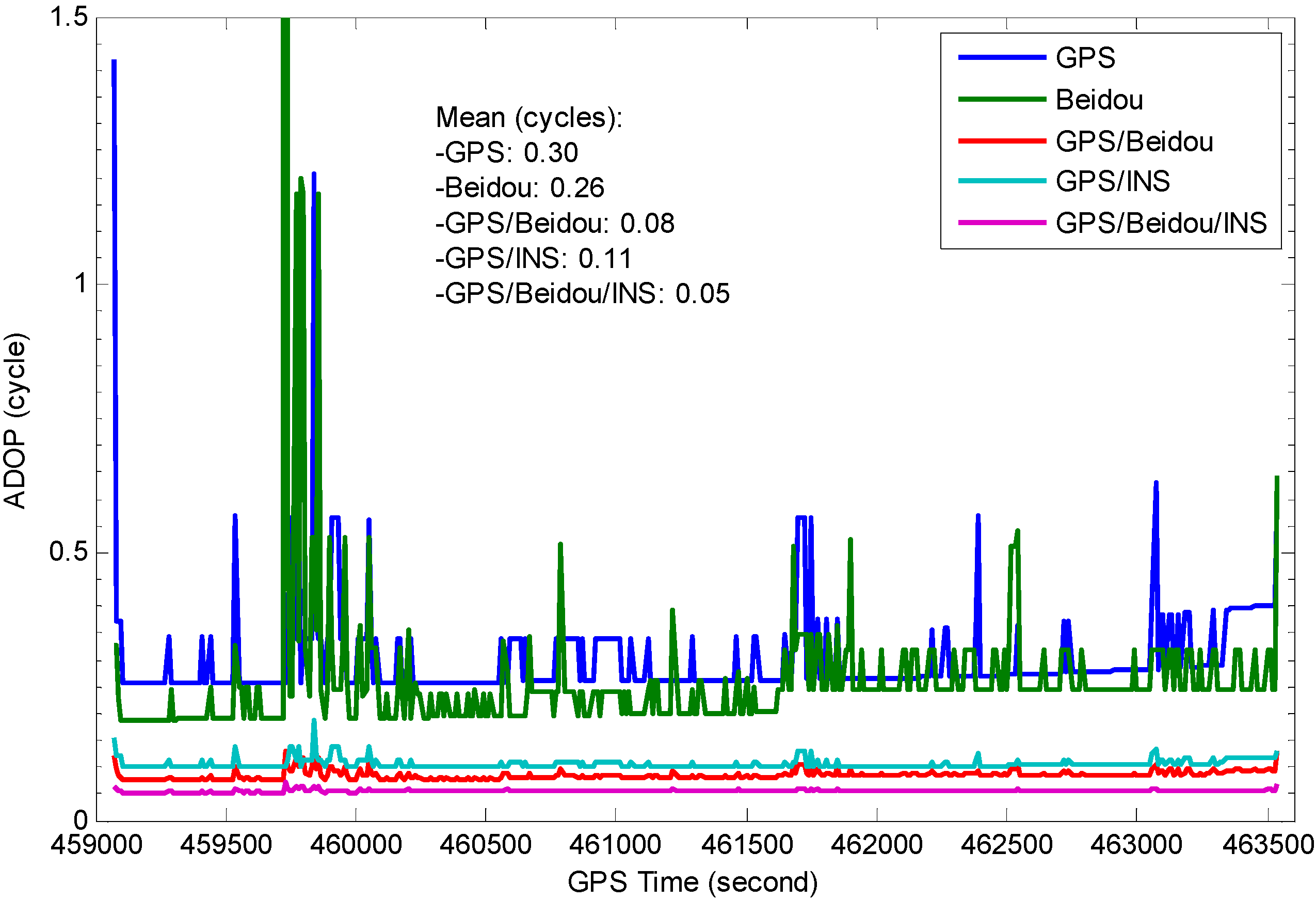
In
Figure 7, the single epoch ADOP time-series over the navigation period for L1 GPS, B1 BDS, L1 GPS + B1 BDS, L1 GPS + INS, L1 GPS + B1 BDS + INS are demonstrated, the code STD are taken 0.37 and 0.35 m for GPS and BDS respectively, the phase STD is 0.01 cycles and INS position STD is set as 0.1 m for each axis. The figure shows the ADOPs of B1 BDS are slightly smaller than those of L1 GPS which is influenced by the number of visible satellites, thus better AR performance is expected to be achieved for BDS-only system, and it is obviously that ADOPs fluctuate strongly with poor satellite coverage, which indicates the performance of single-frequency instantaneous AR process is limited due to large ADOPs for the single system. The combined L1 GPS and B1 BDS obviously outperform single system and the ADOP time series are more stable, the instantaneous success-rate performance of the combined system is significantly improved. The figure also shows the ADOP time series of L1 GPS/INS combined system has an almost identical behavior as that of L1 GPS and B1 BDS combined system, this is due to precise priori position information provided by INS. As expected, the GPS/BDS/INS combined system achieves the best performance, the ADOP values are below 0.1 cycles which indicates high AR success-rate performance can be achieved.
Figure 7.
Impact of system configuration on ADOP (INS position STD 0.1 m, 15° cut-off elevation).
Figure 7.
Impact of system configuration on ADOP (INS position STD 0.1 m, 15° cut-off elevation).
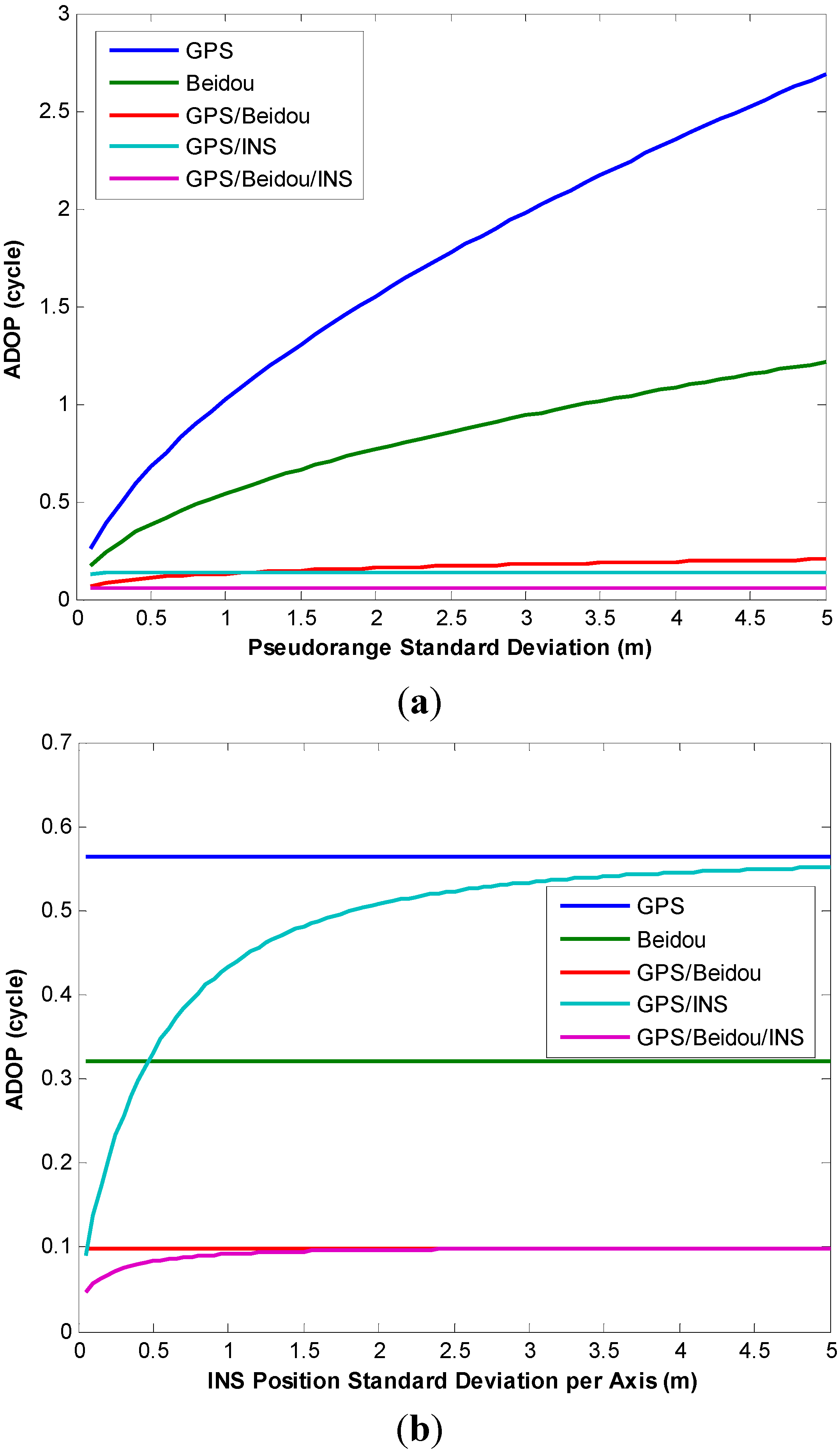
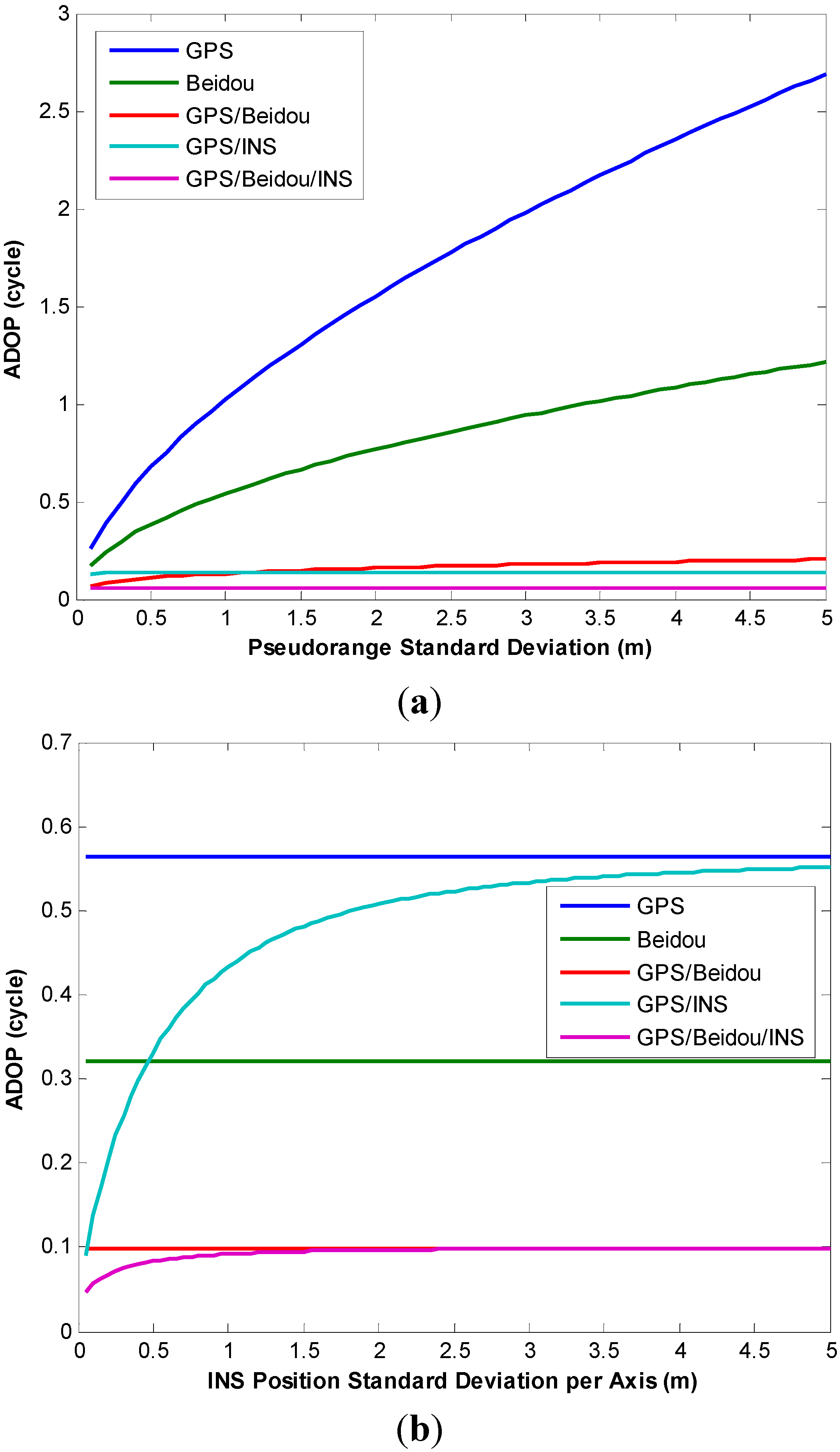
More analyses were conducted to study the influence of pseudorange accuracy and INS position accuracy on AR performance,
Figure 8a depicts the effect of pseudorange accuracy on ADOP at epoch 459,910 s, the effect of INS position accuracy on ADOP is shown in
Figure 8b. It can be seen from
Figure 8a that the ADOPs of a single system vary significantly depending on the magnitude of pseudorange errors. However, those values become significantly smaller for the integrated GPS/BDS system which means higher success rates can be obtained. As expected, the addition of INS measurements significantly improves the AR performance. On the other hand, INS predicted position errors grow during the GNSS outages, and the quality of INS bridging heavily depends on the outages duration and the quality of IMU sensor. As can be seen in
Figure 8b, the ADOPs of the INS-aided system are still less than those of a single GNSS system when the INS position STD varies from 5 cm to 5 m, however the ADOPs of this GPS/BDS/INS combined system have a similar behavior as that of GPS/BDS combined system after INS position STD exceeds 2 m, it indicates the benefits to AR from INS-aided system becomes negligible after long GPS/BDS outages.
Figure 8.
(a) Effect of pseudorange accuracy on ADOP; (b) Effect of INS position accuracy on ADOP.
Figure 8.
(a) Effect of pseudorange accuracy on ADOP; (b) Effect of INS position accuracy on ADOP.
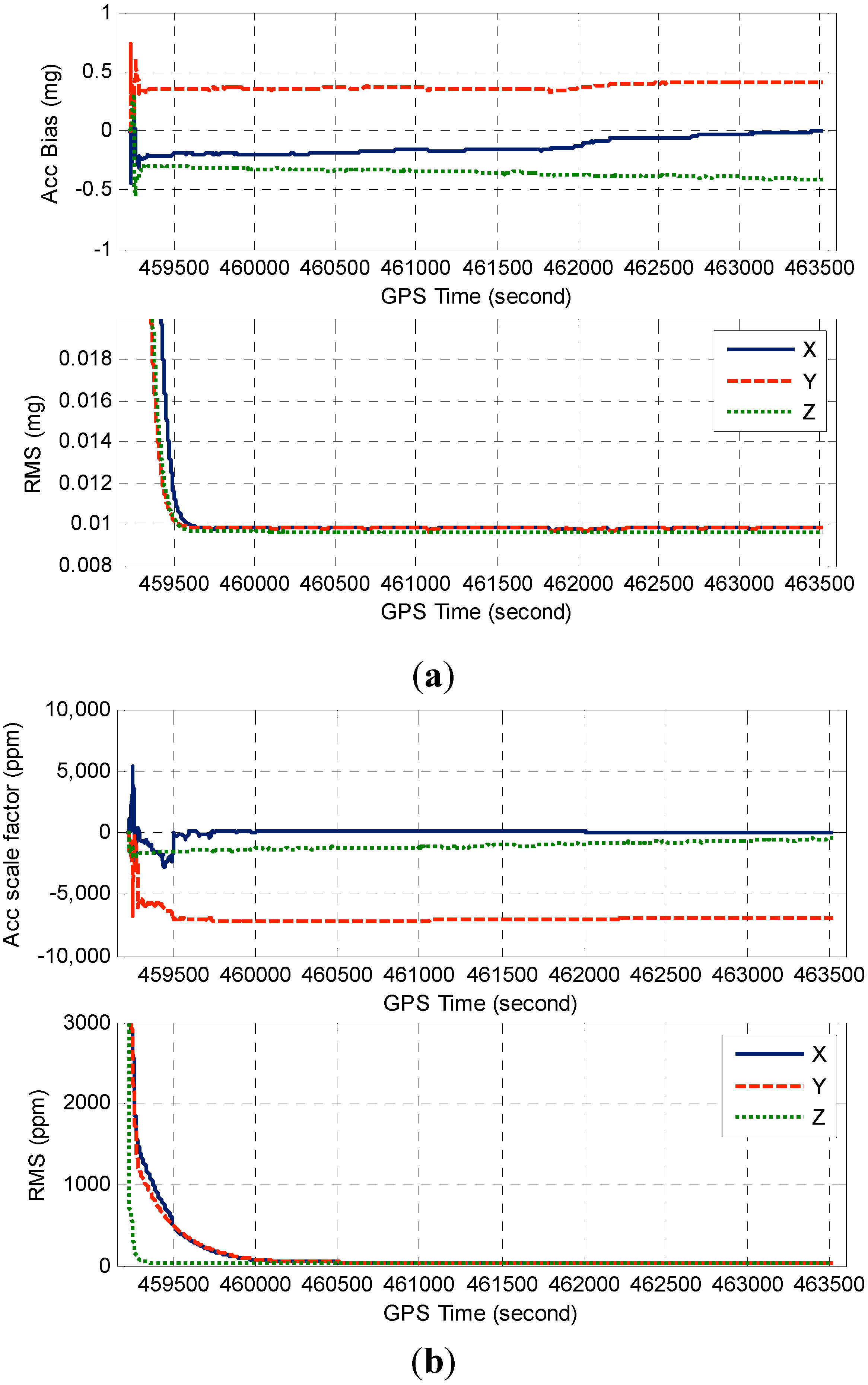
Since most of common error sources between reference and rover stations can be eliminated by the DD technique for the short-baseline configuration, the residual errors are mainly composed of multipath errors. In this paper, the twenty seven states GPS/BDS/INS TC EKF was implemented, the process noise parameters were turned by using the available sensor specifications and the results extracted from Allan variance (AV) analysis. The IMU sensor errors are estimated by the EKF, and raw INS measurements are then calibrated with the optimal estimates which will improve the INS navigation performance during GNSS outages.
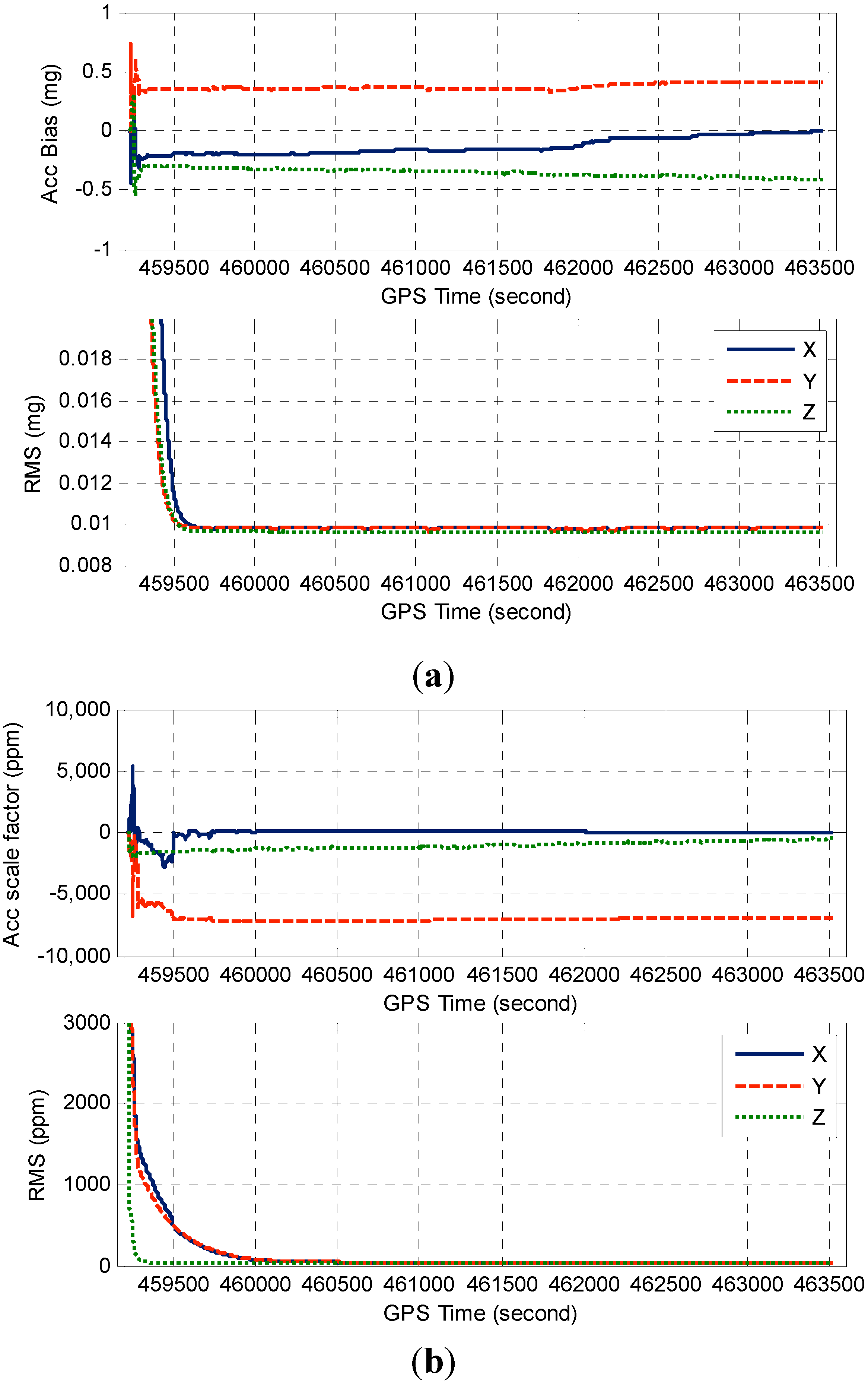
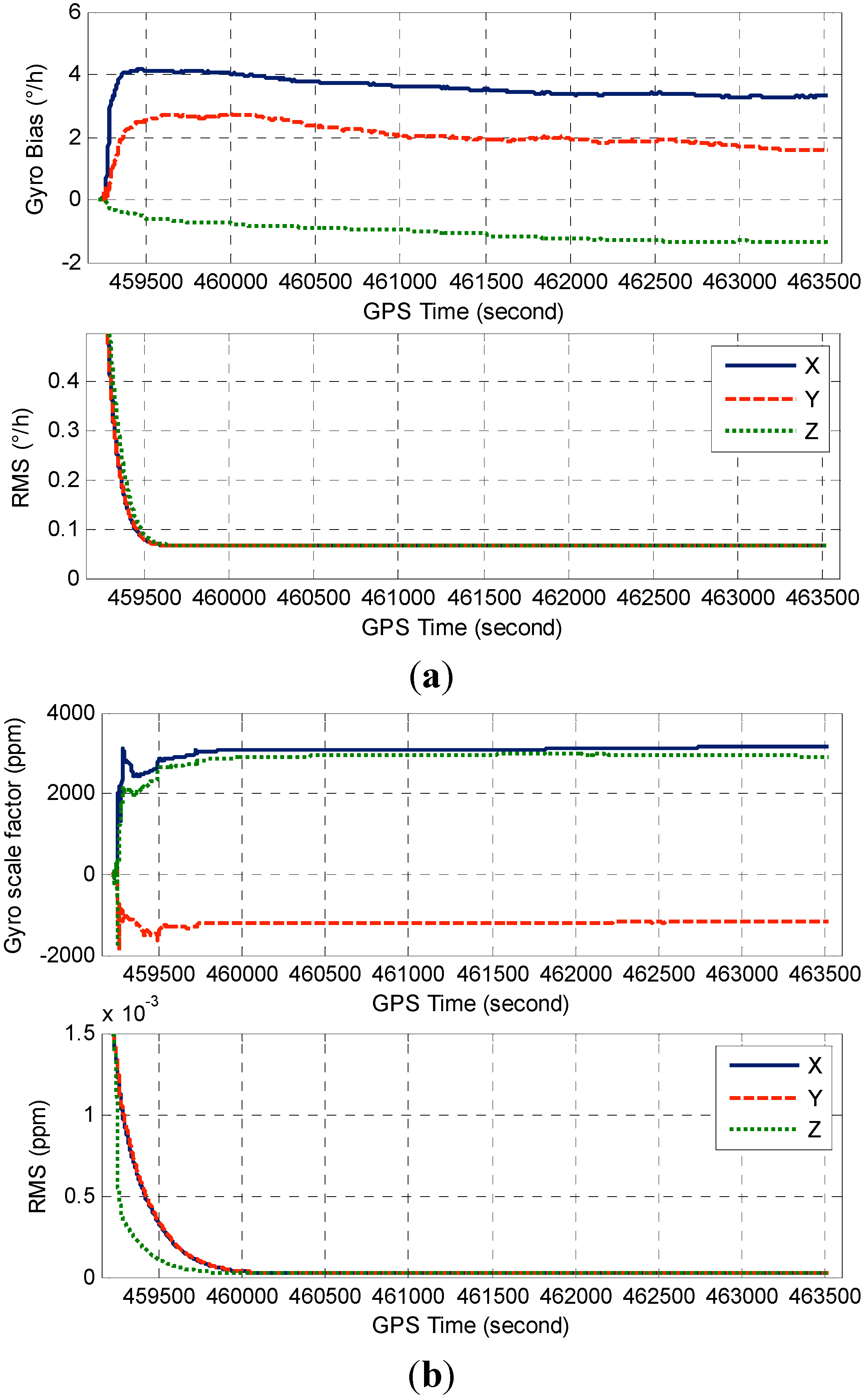
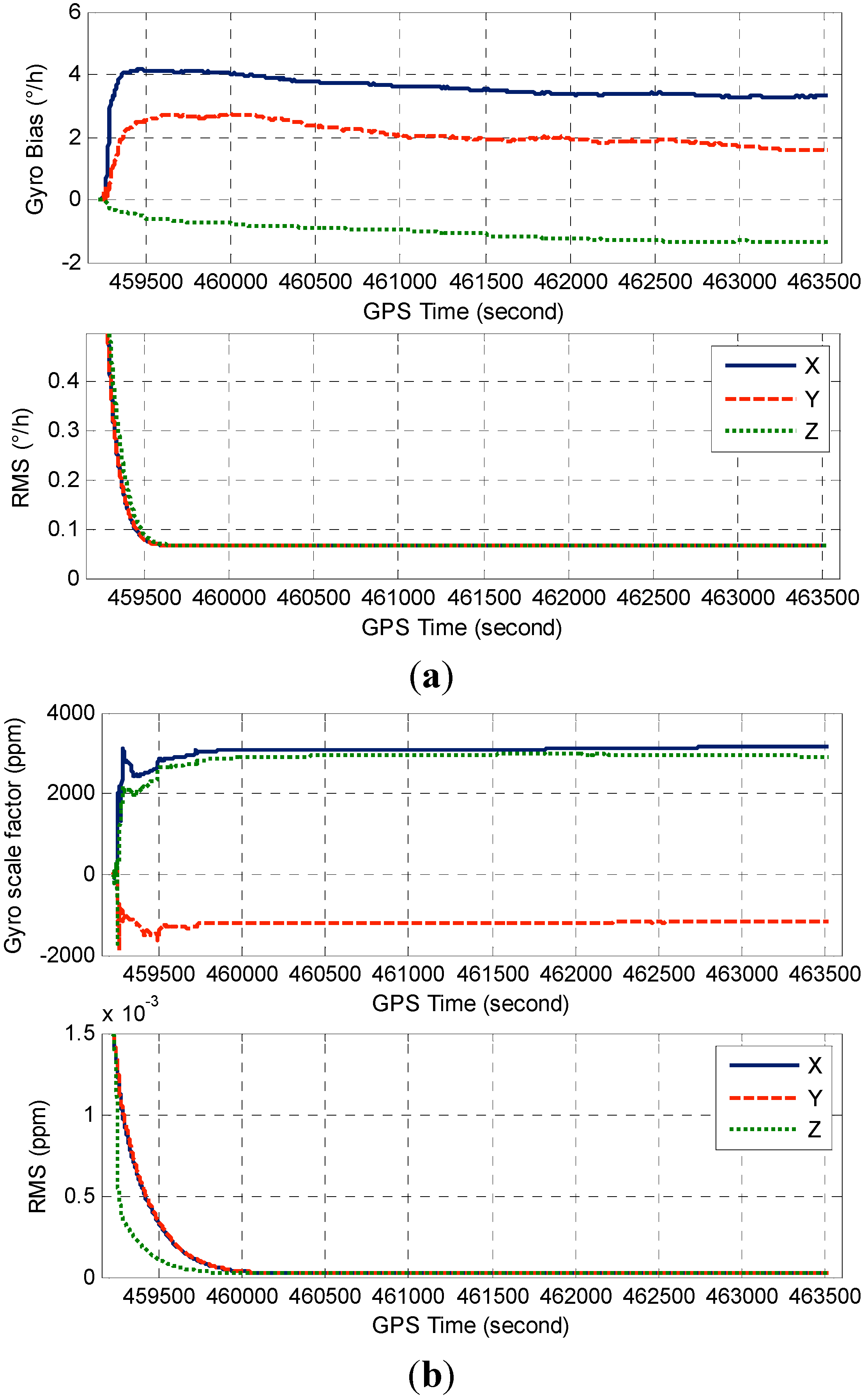
Figure 9a illustrates the accelerometer bias and its RMS derived from the TC filter covariance matrix,
Figure 9b displays the corresponding accelerometer scale factor estimates and the RMS. The gyro error estimates and the corresponding RMS are shown in
Figure 10. As can be seen from
Figure 9 and
Figure 10, the IMU sensor error estimates quickly converge to stable values after the initial transition period, and the scale factor estimates somehow converge slower than those of bias estimates due to its weak observability.
Figure 9.
(a) Estimated accelerometer biases and RMS; (b) Estimated accelerometer scale factors and RMS.
Figure 9.
(a) Estimated accelerometer biases and RMS; (b) Estimated accelerometer scale factors and RMS.
The ambiguity resolution is a critical process for high accuracy positioning applications. In this research, six experiment schemes were designed to investigate the AR performance of dual-frequency single-epoch kinematic positioning: scheme 1—GPS, scheme 2—BDS, scheme 3—GPS/BDS, scheme 4—TC GPS/INS, scheme 5—TC BDS/INS, scheme 6—TC GPS/BDS/INS. Here we have evaluated the ambiguity fixing rate of single epoch AR at different elevation mask angles which represent different observation conditions, a total of 4200 epochs data have been processed, the fixed solution was validated by using the ratio test with the thresholds three.
Figure 10.
(a) Estimated gyro biases and RMS; (b) Estimated gyro scale factors and RMS.
Figure 10.
(a) Estimated gyro biases and RMS; (b) Estimated gyro scale factors and RMS.
As shown in
Table 3, the fix rates of the individual GNSS system are less than 95% under all conditions, and the fix rates of BDS are comparable to those of GPS when the cut-off elevation angle is lower than 25°, with higher cut-off elevations, the number of tracked GPS satellites is on the decrease and GPS AR performance degrades dramatically, however, the degradation of BDS AR performance is not significant due to the special constellation of BDS. The integration of GPS and BDS has achieved a significant improvement in the availability and reliability, the fixed rates of single-epoch GPS/BDS AR are larger than those of single system under high-elevation conditions, however AR performance degrades under low-elevation conditions because of the presence of low-elevation multipath interference, the explanation lies in bias in the estimates induced by biased observations, and the incorrect fixed solution is then rejected by the validation process even though success rates are very high based on the formal analysis. As the cut-off elevation angle increase to 20°, the impact of multipath weakens and fixed rates increase.
Table 3.
Ambiguity fixing rate of the dynamic test for 10°–40° cut-off elevations, using different data process strategies.
Table 3.
Ambiguity fixing rate of the dynamic test for 10°–40° cut-off elevations, using different data process strategies.
| Fix Rate (%) | Cut-Off Elevation (°) |
|---|
| Configuration | | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
|---|
| GPS | 84.05 | 86.84 | 92.90 | 92.00 | 74.59 | 44.26 | 31.07 |
| BDS | 86.73 | 89.52 | 91.77 | 92.59 | 88.57 | 80.55 | 80.55 |
| GPS/BDS | 75.27 | 82.94 | 93.68 | 94.79 | 96.21 | 96.90 | 96.59 |
| TC GPS/INS | 98.50 | 98.17 | 98.67 | 98.76 | 98.86 | 99.69 | 86.38 |
| TC BDS/INS | 93.72 | 96.24 | 97.60 | 97.84 | 97.95 | 97.41 | 97.41 |
| TC GPS/BDS/INS | 95.93 | 96.93 | 98.90 | 99.14 | 99.50 | 99.62 | 99.57 |
| TC GPS/INS (ad) | 98.79 | 98.95 | 99.29 | 99.55 | 99.26 | 99.66 | 86.40 |
| TC BDS/INS (ad) | 95.29 | 96.26 | 98.55 | 98.26 | 98.90 | 98.76 | 98.76 |
| TC GPS/BDS/INS (ad) | 96.48 | 96.95 | 98.93 | 99.21 | 99.57 | 99.83 | 99.86 |
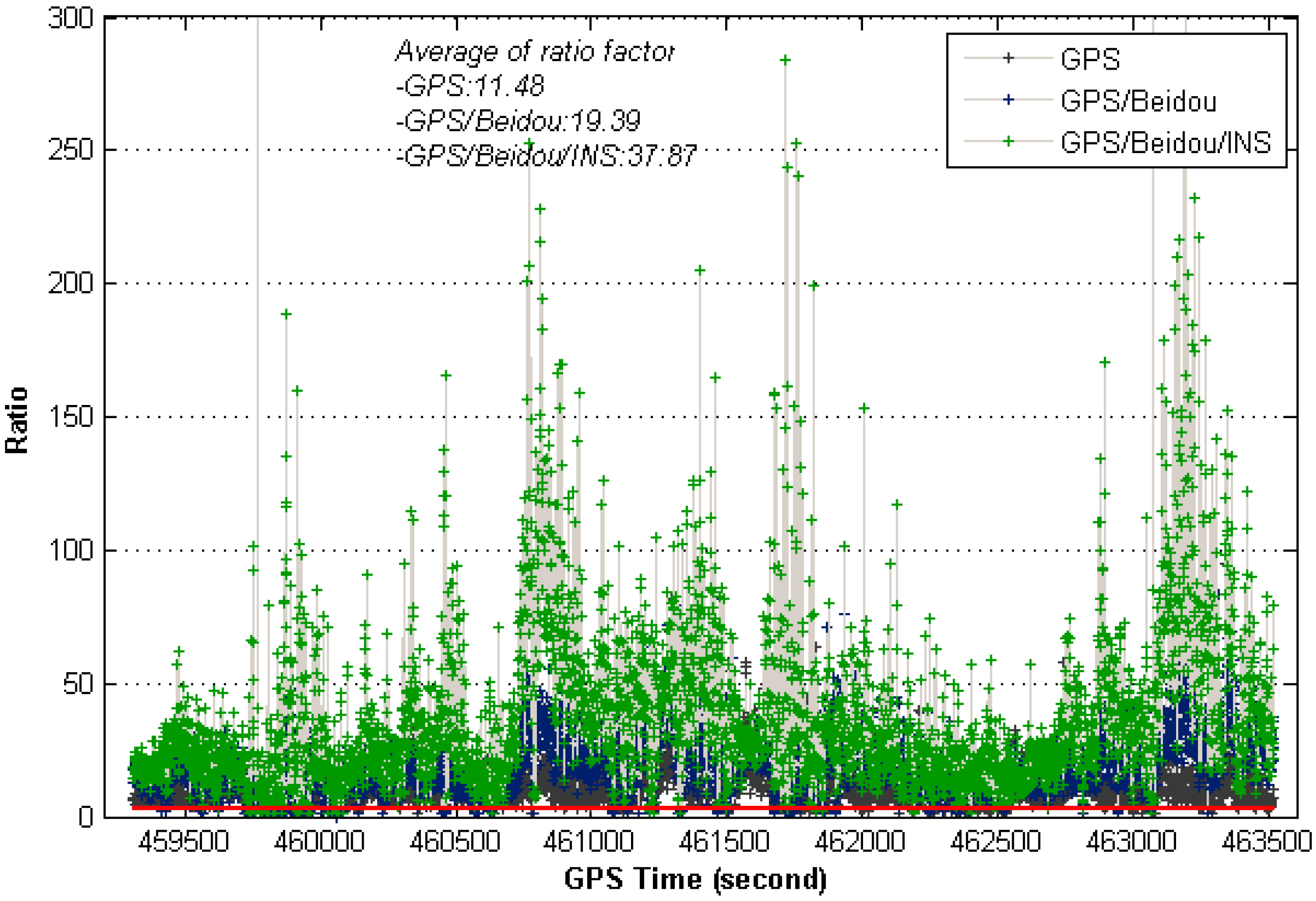
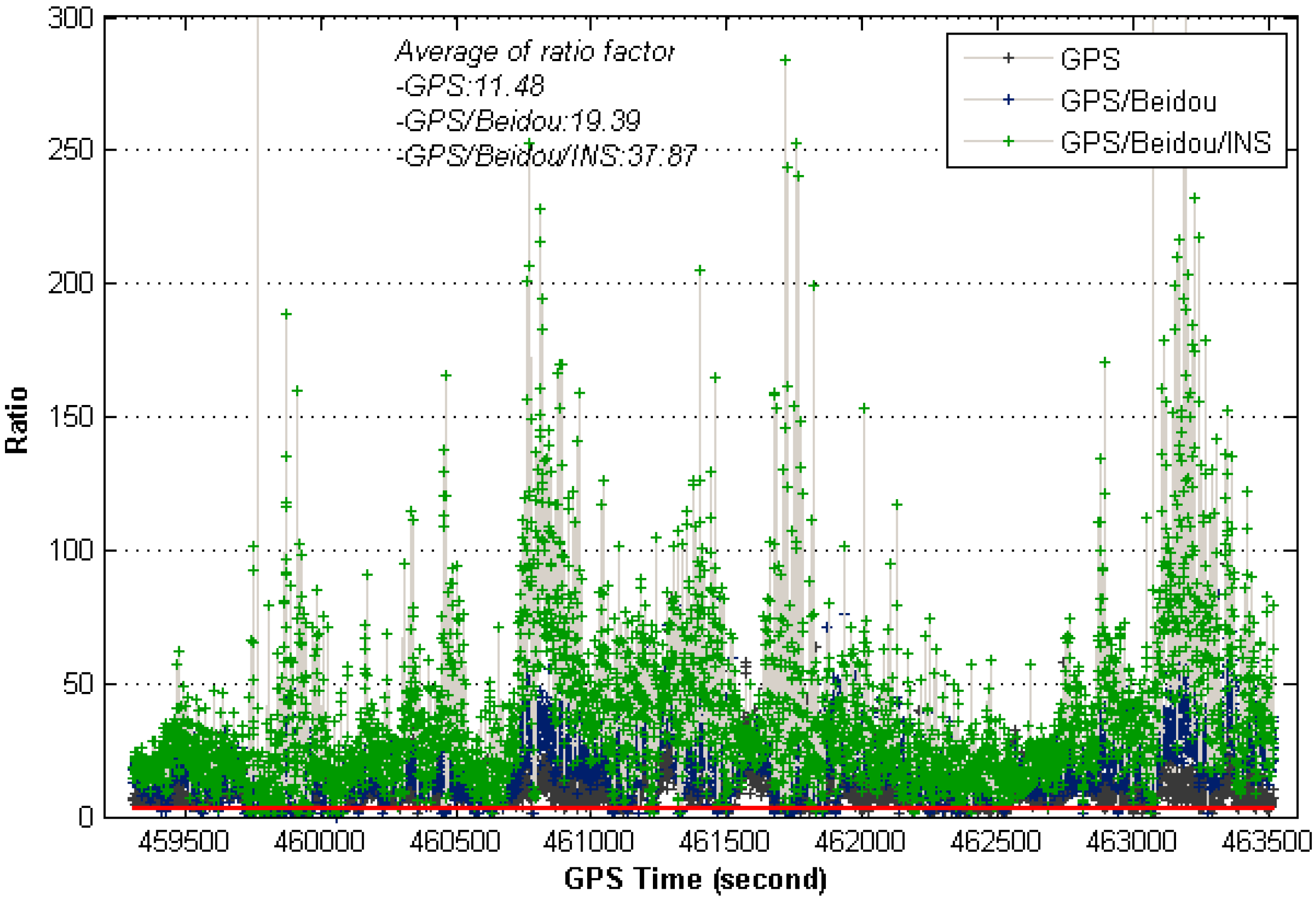
However, the most impressive thing in the results is that the fix ratio is significantly improved with the addition of INS to GNSS.
Figure 11 shows the ratio test results by the improved INS aiding strategy at 20° cut-off elevation angle, instances where the ratio-value get below three is indicated by the red line. The figure clearly shows ratio values from INS aiding strategy are significantly larger than GNSS-only ones, which means the proposed INS aiding strategy is effective to enhance the fixing probability.
Figure 11.
Ratio values of instantaneous AR for different system configurations (20° cut-off elevation).
Figure 11.
Ratio values of instantaneous AR for different system configurations (20° cut-off elevation).
In order to mitigate the multipath impact on AR performance, the adaptive fading memory stochastic modeling strategy is adopted, the fading factor is taken 0.85, and the corresponding results are also listed in
Table 3 for comparison. It clearly shows the proposed strategy is effective for improving the AR performance, the fix ratio is improved relative to the strategy using the
a priori elevation-dependent weighting scheme, and a slightly larger improvement for TC BDS/INS has been achieved, indicating a more accurate stochastic model is beneficial for AR. Besides, the multipath effect is suppressed due to the
a priori INS constraint which indicates a better AR performance can be achieved at lower cut-off elevations. We can also see TC GPS/BDS/INS system brings much advantage for AR at higher cut-off elevations, the fixing rates increase to 99% with cut-off elevations up to 25°.We also recognize AR performance of GPS is slightly better than BDS with the aid of INS.
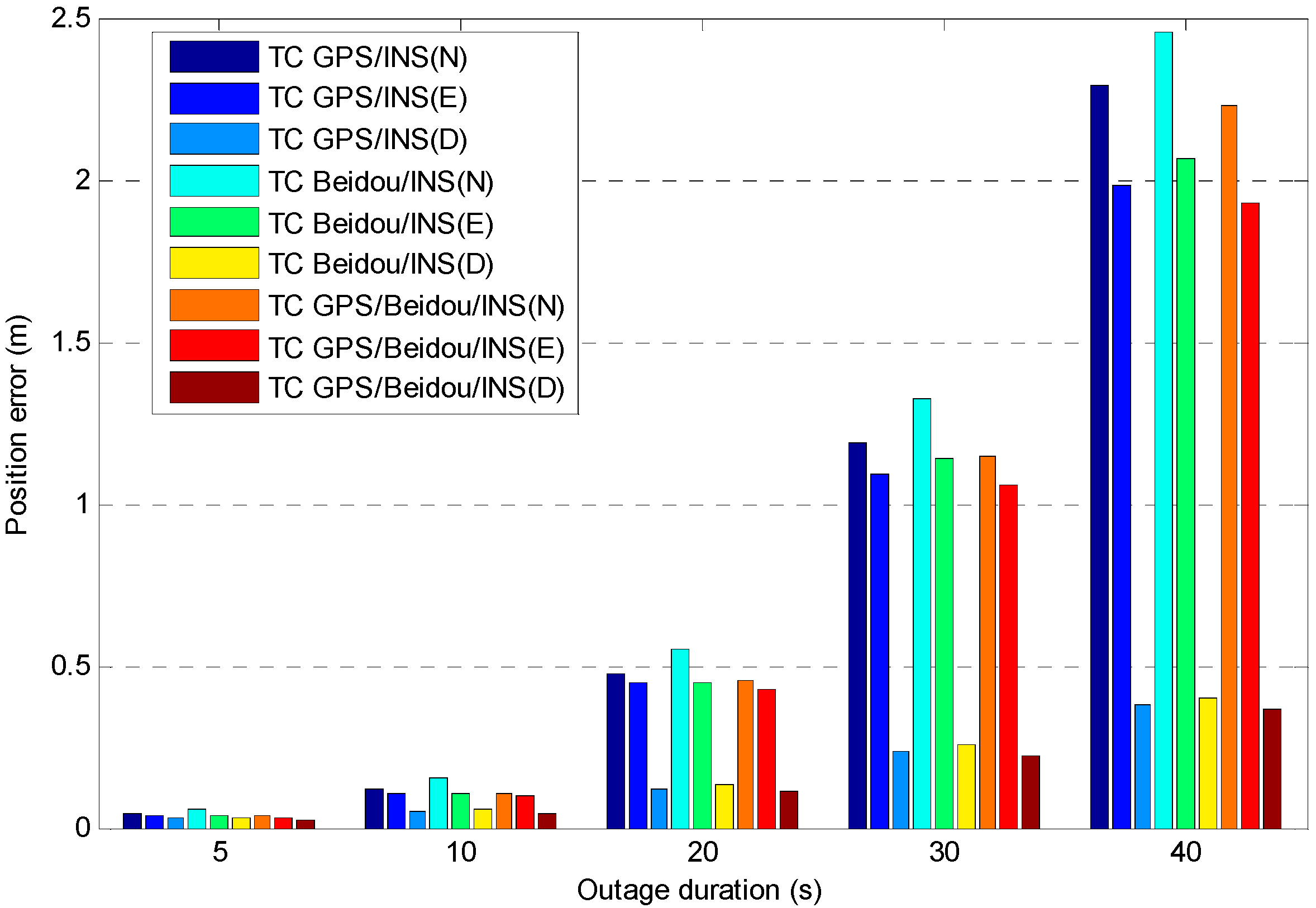
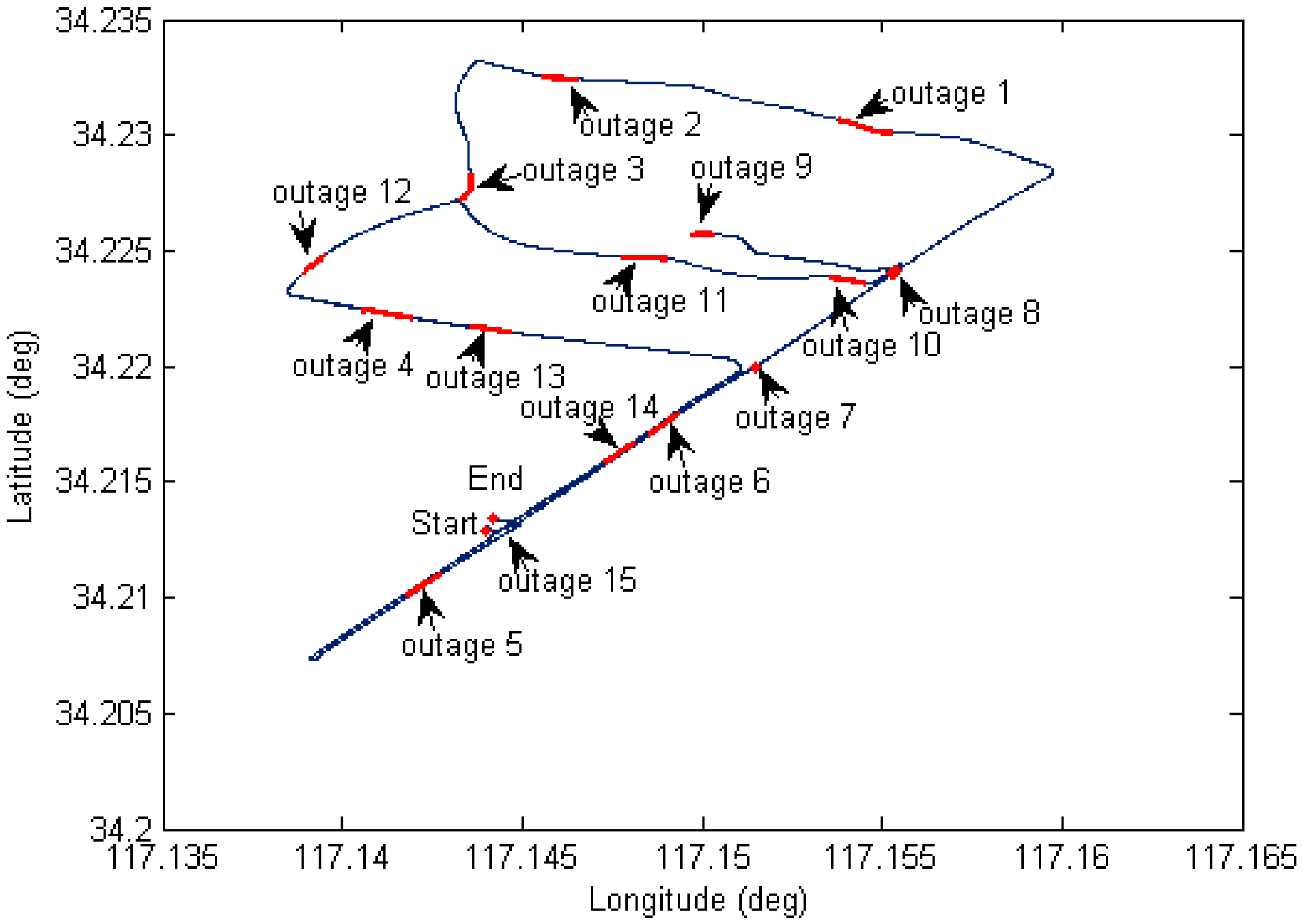
For high accuracy kinematic positioning applications, the capability to provide a robust and continuous solution is critical to maintain the positioning performance. In harsh navigation environments, e.g., while driving through tunnels or along unban canyons, the satellite availability is reduced or the solution is even unavailable, so we expect to achieve fast ambiguity recovery over long outages with the help of INS. In order to evaluate INS-only position performance during GNSS outages, we have designed fifteen complete GNSS outages under different vehicle dynamics (see
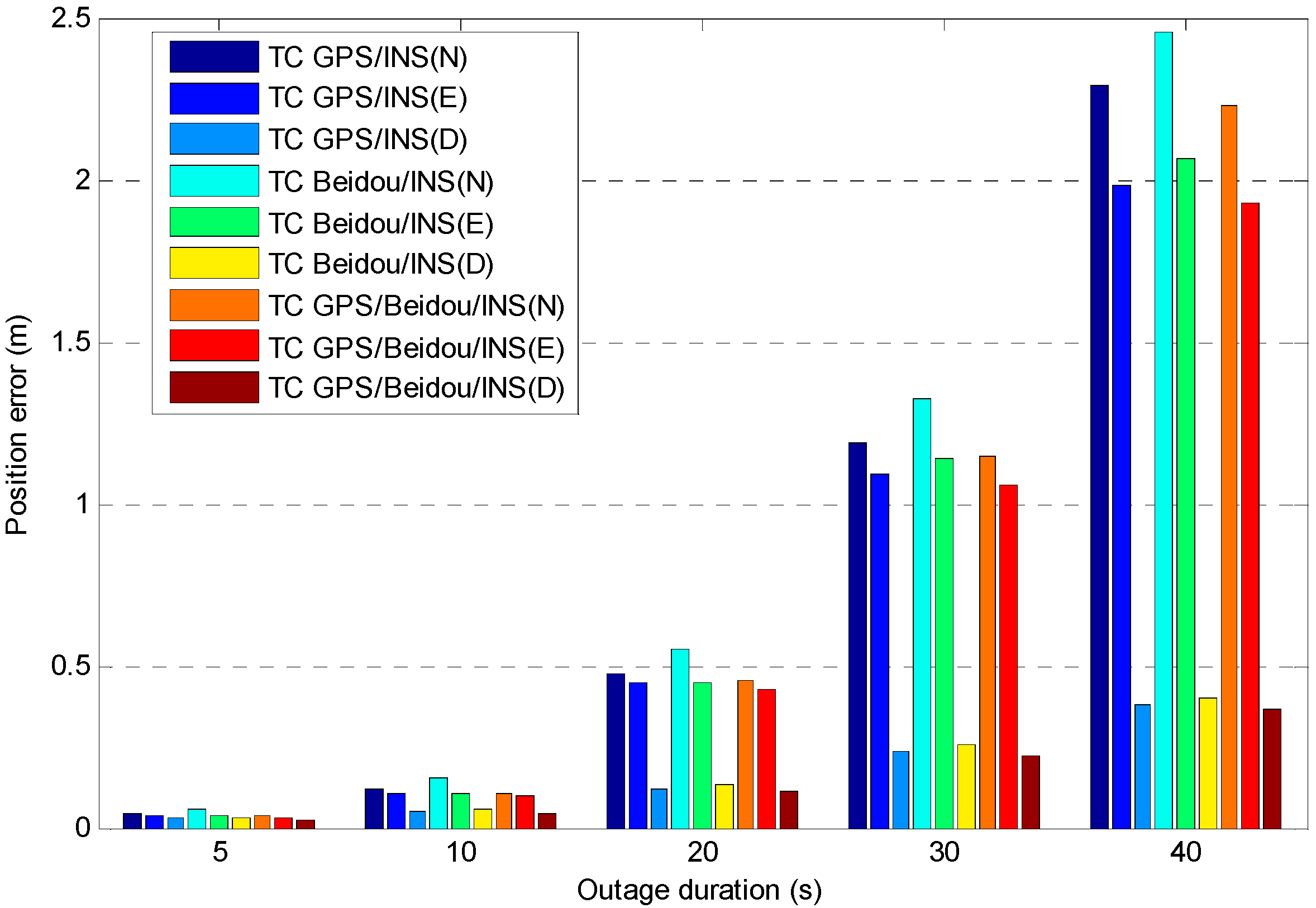
Figure 12), five different outage durations for each outage were considered (5, 10, 20, 30 and 40 s). We used the maximum error as the measure of positioning performance due to the fact it typically occurs at the end of the outage, and the combined GPS/BDS fixed solution was used as a reference, any abrupt departure point in the reference trajectory has been removed. The average maximum error of each position component for the fifteen outages is shown in
Figure 13, where it can be seen the INS position errors stay at a reasonable level after the calibration processes. The error growth behaves with a similar tendency for the three different TC configurations, with a slightly better performance obtained from TC GPS/BDS/INS integration. The positioning performance for the easting and northing component is worse than the height component which is mainly caused by the poorer heading estimates.
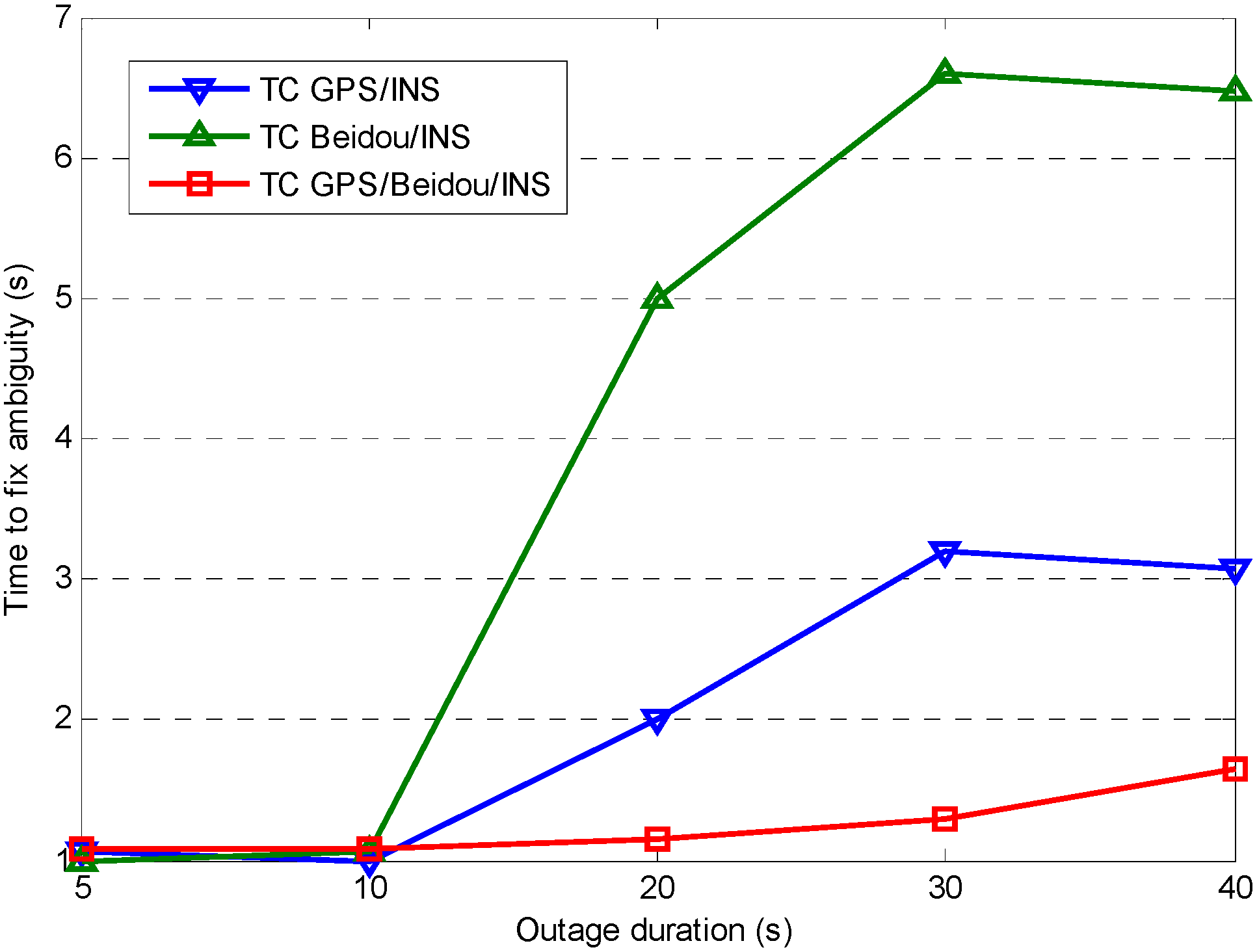
Figure 14 shows the time-to-fix ambiguities based on the analysis on the 15 completed outages. The results indicate AR performance is similar for TC GPS/INS, TC BDS/INS and TC GPS/BDS/INS over a short outage period (outage duration of less than 10 s), however AR performance of TC GPS/BDS/INS configuration shows a significant improvement after a long signal outage, as it can provide instantaneous fixed solutions even in the case of a 40 s outage. This has direct benefits to system reliability and availability.
Figure 12.
Ground track of test vehicle with simulated GNSS outages.
Figure 12.
Ground track of test vehicle with simulated GNSS outages.
Figure 13.
Average of the maximum position error vs. outage duration for different system configurations.
Figure 13.
Average of the maximum position error vs. outage duration for different system configurations.
Figure 14.
Time to fix ambiguity after different outage durations for different system configurations.
Figure 14.
Time to fix ambiguity after different outage durations for different system configurations.
The AR results in
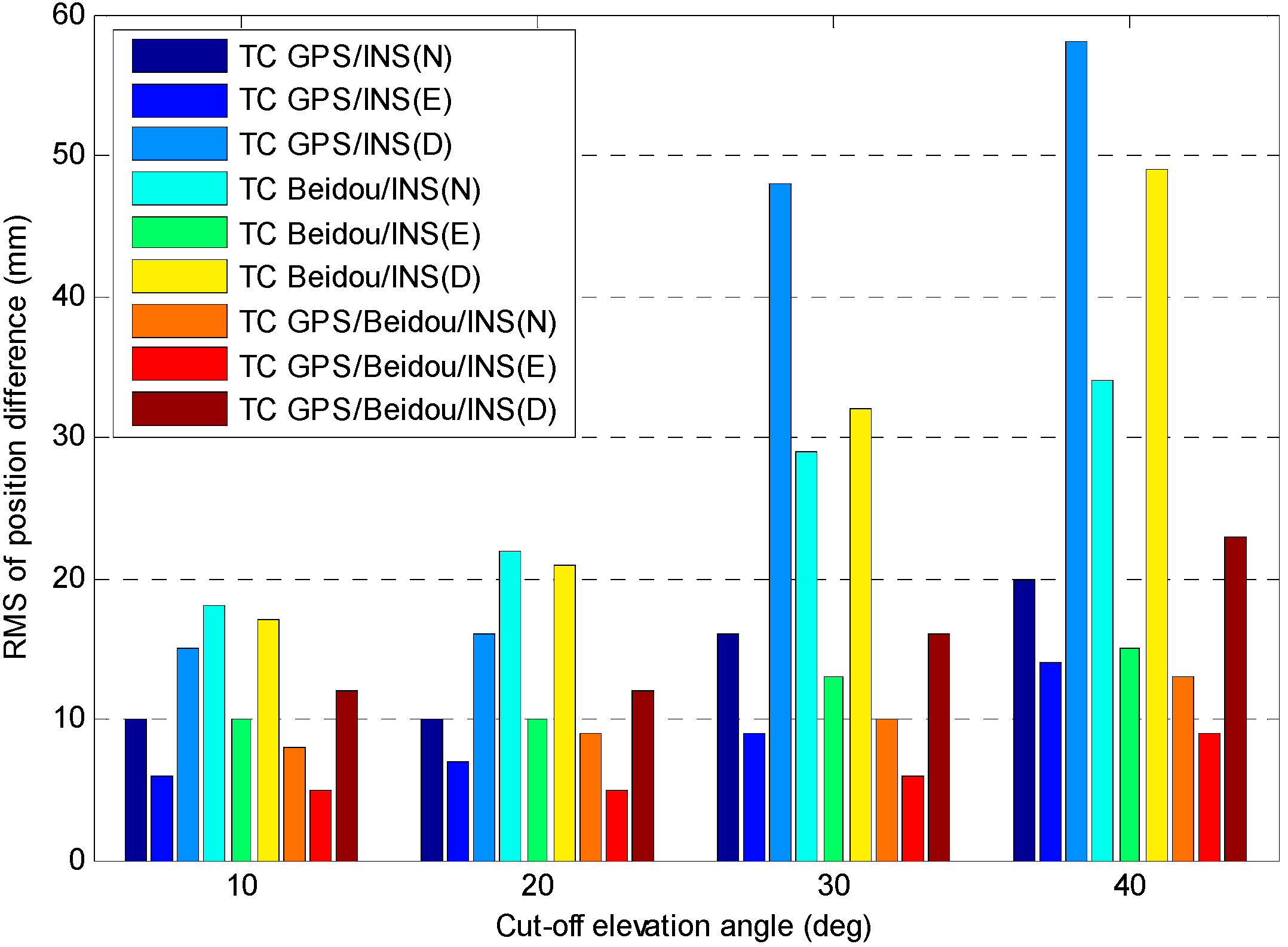
Table 3 are very promising, however the positioning performance is related to satellite geometry and INS positioning quality. We have evaluated the positioning performance of combined system at different cut-off elevations, where the reference solution is GPS/BDS fixed solution.
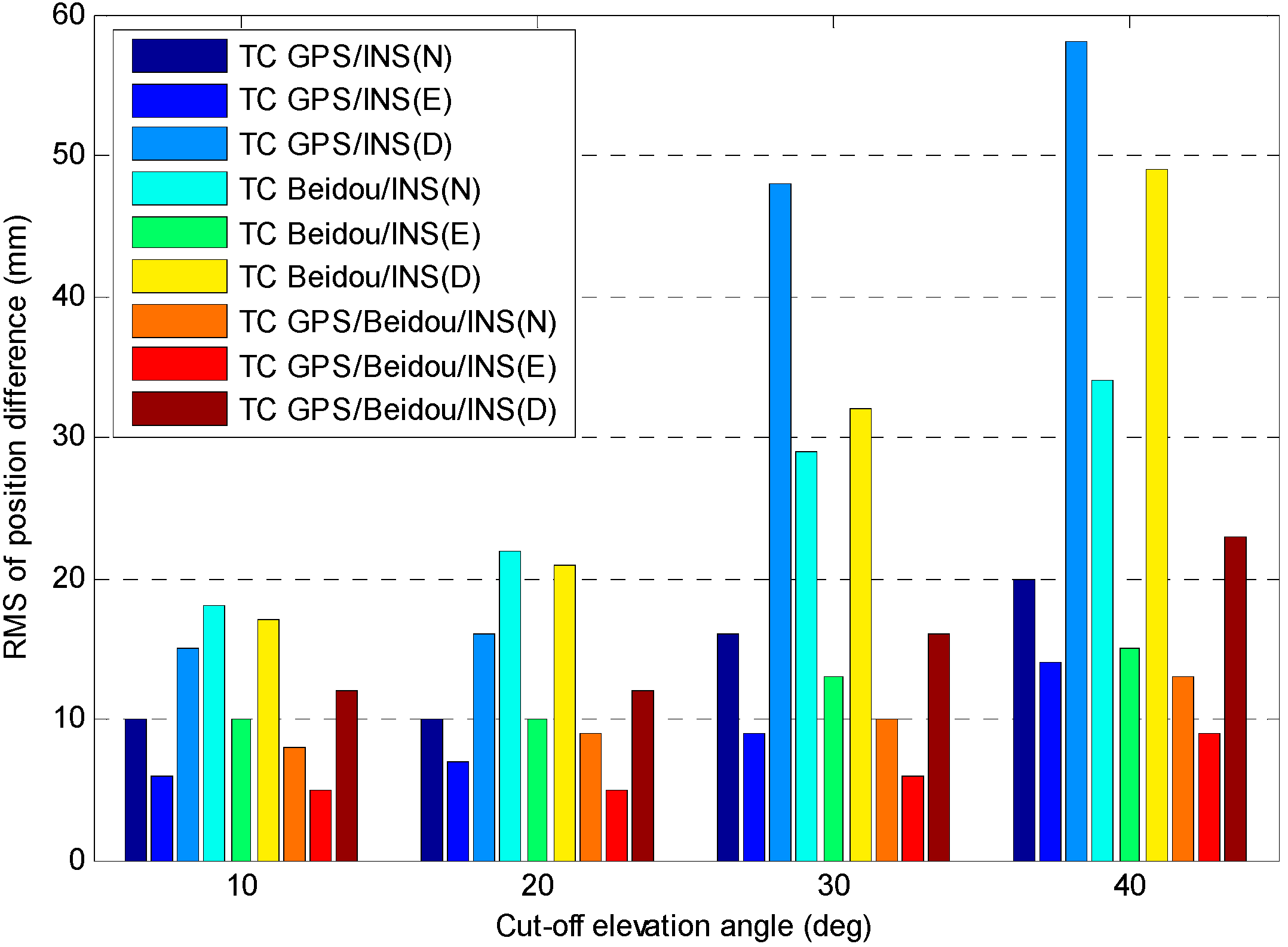
Figure 15 presents the RMS of the position difference for different system configurations.
It shows that the positioning performance of TC GPS/INS and TC BDS/INS degrades significantly as the cut-off elevations increase, however it only shows a slight degradation in positioning accuracy for the TC GPS/BDS/INS system, with the cut-off elevation angle of 40°, the RMS of position difference is 13, 9 and 23 mm for TC GPS/BDS/INS system in N, E and D components, respectively, this becomes particularly beneficial when positioning in constrained environments, e.g., in urban canyons or when low-elevation multipath interference is dominant. The figure also shows the position accuracy for TC GPS/INS is superior to the TC BDS/INS one, it can also be seen that the accuracy in N and D component are obviously worse than that in E component, especially for BDS, and such results are consistent with the DOP values as illustrated in
Table 2.
Figure 15.
RMS of position difference vs. cut-off elevation angle for different system configurations.
Figure 15.
RMS of position difference vs. cut-off elevation angle for different system configurations.
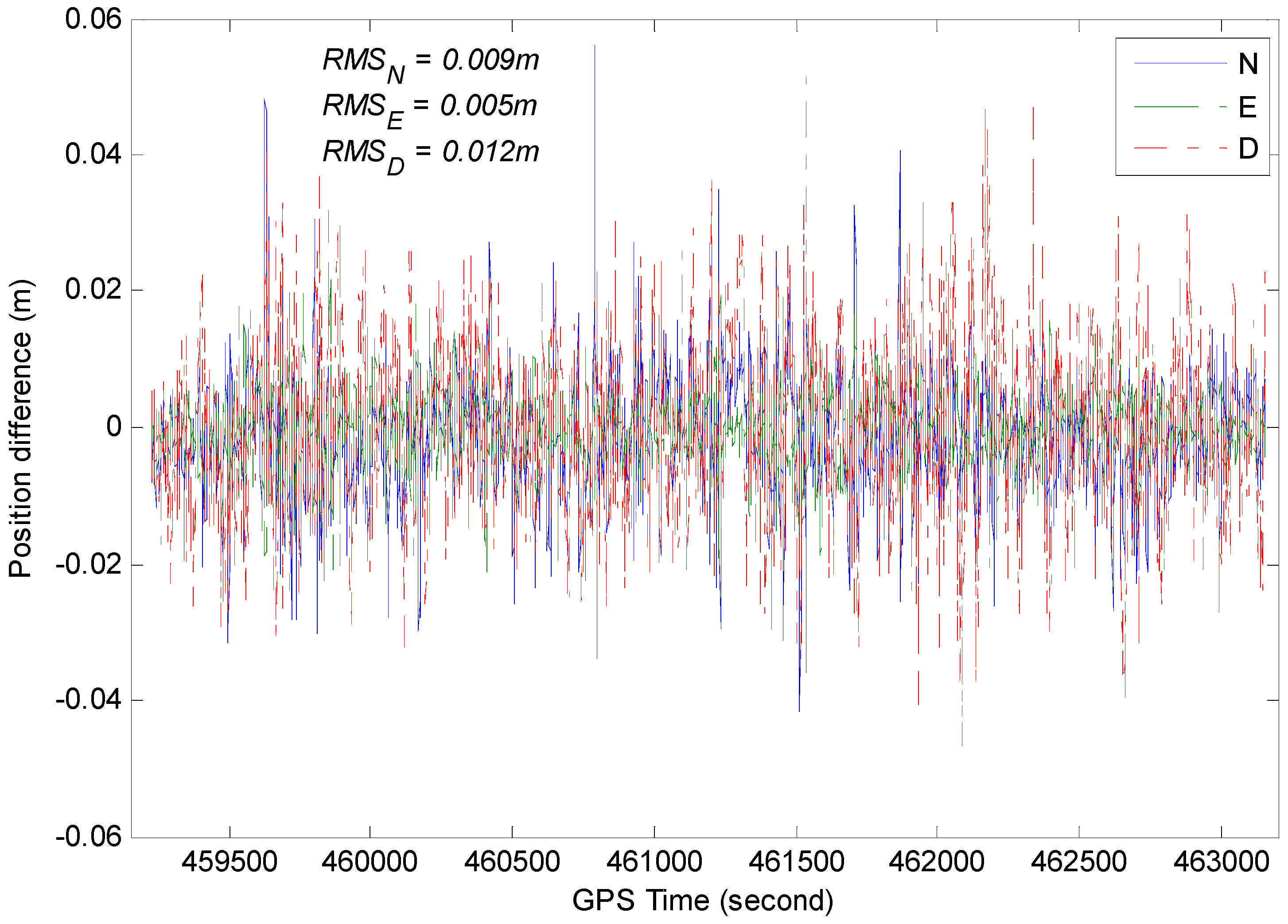
A comparison between GPS/BDS/INS integration solution and GPS/BDS fixed solution at 20° cut-off elevation is provided in
Figure 16. The difference stays below 4 cm most of the time for each component, and occasionally reaches 6 cm, which may be caused by vehicle dynamics.
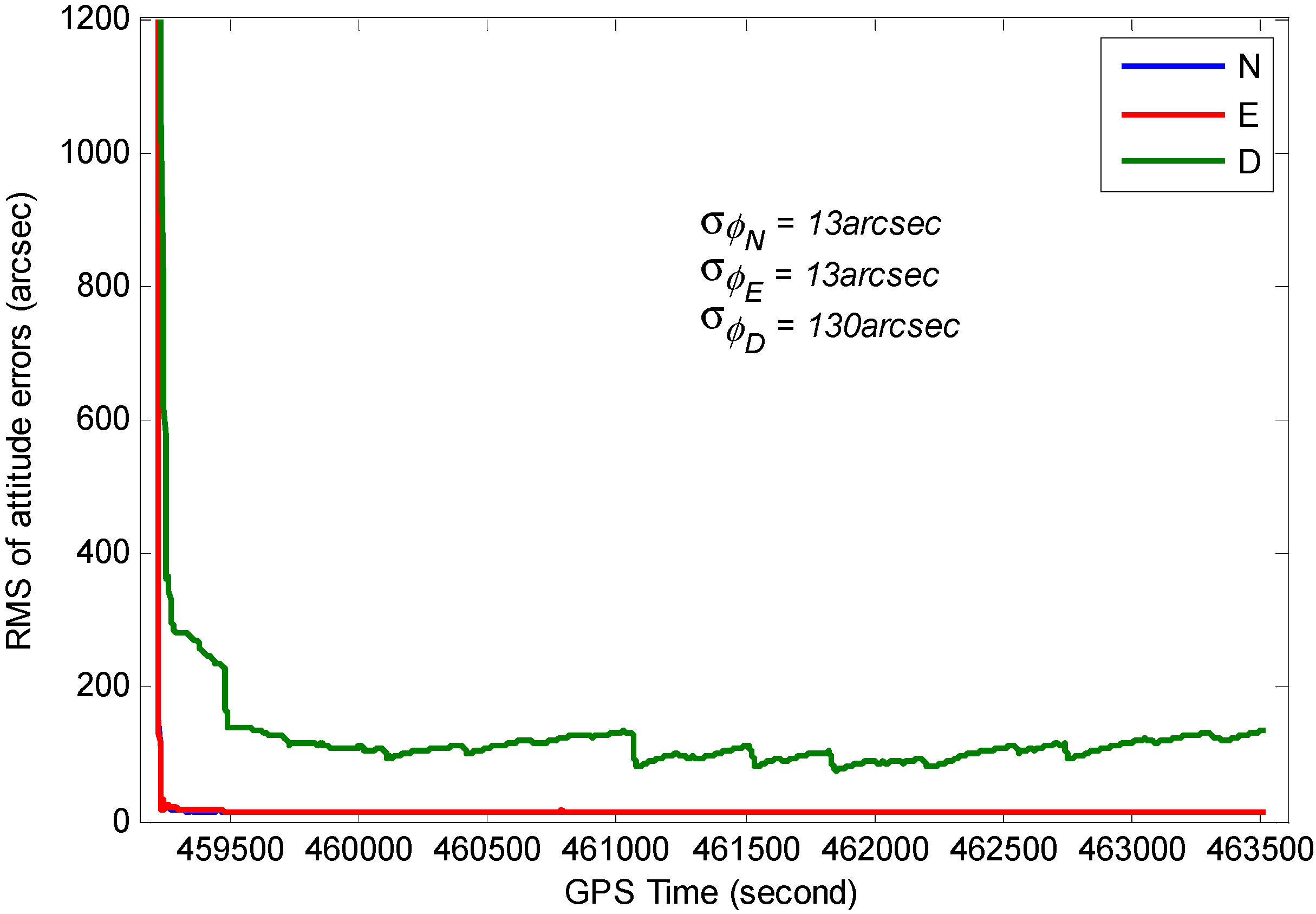
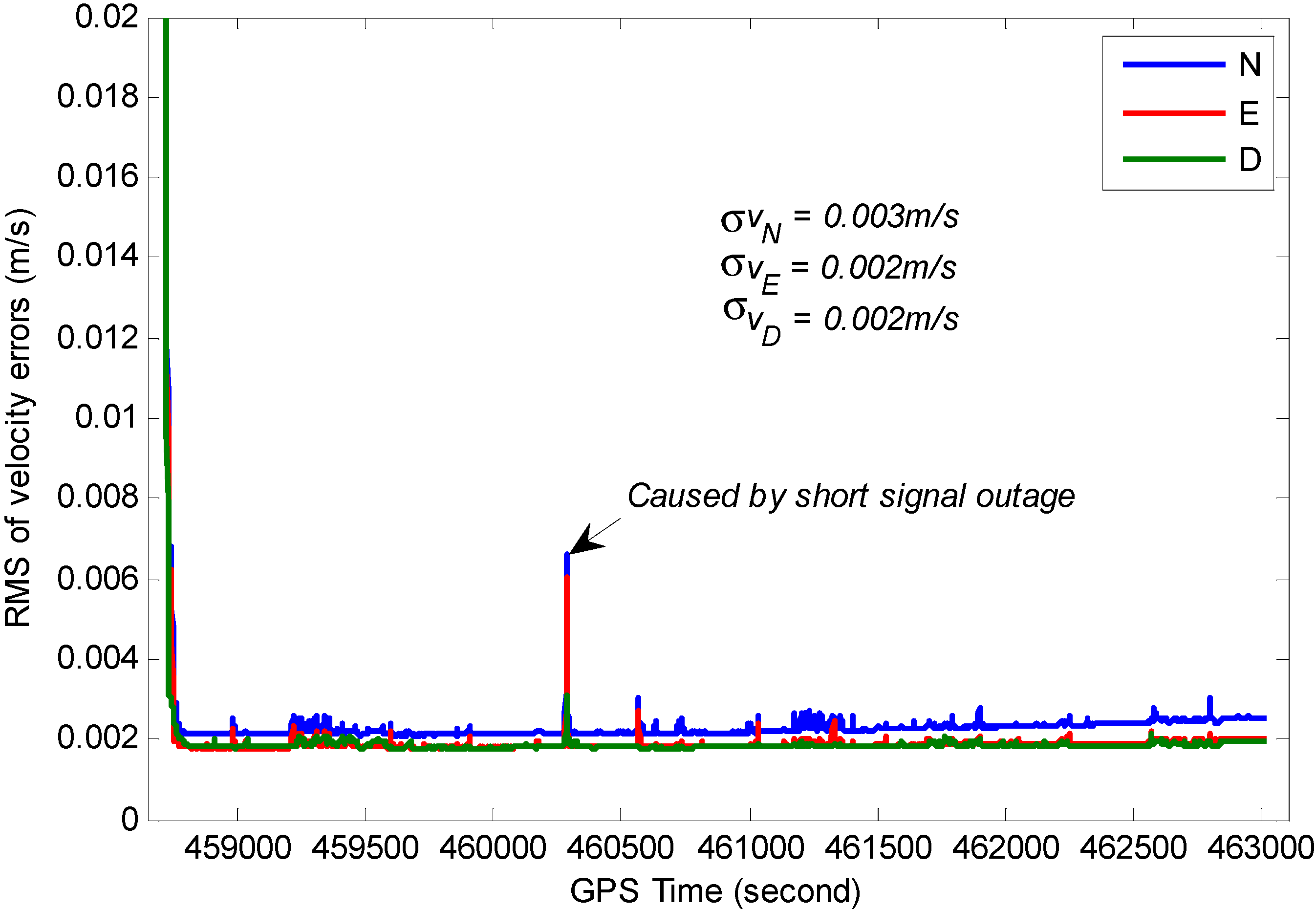
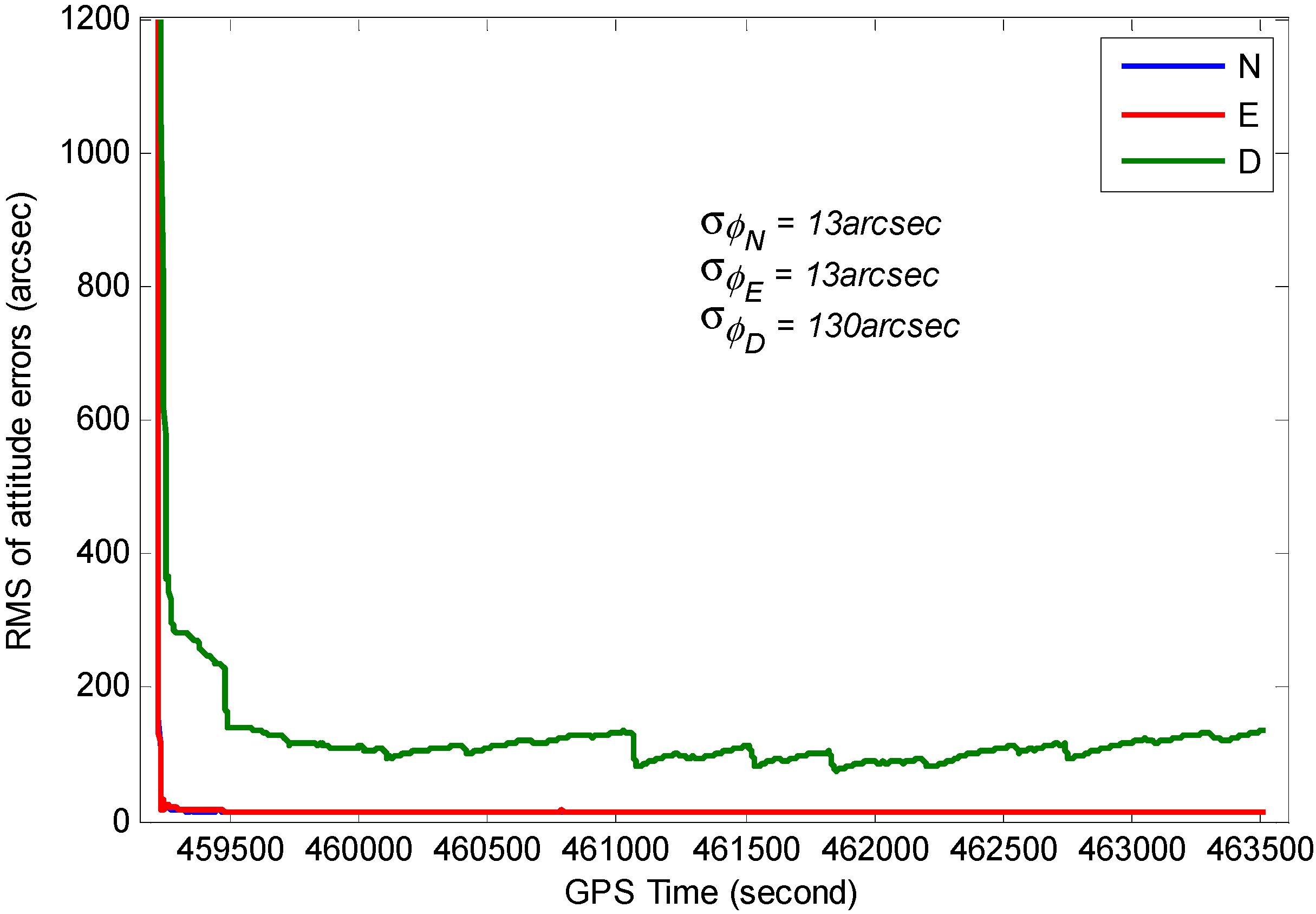
The RMS for position, velocity and attitude of the TC GPS/BDS/INS system based on variance analysis are illustrated in
Figure 17,
Figure 18 and
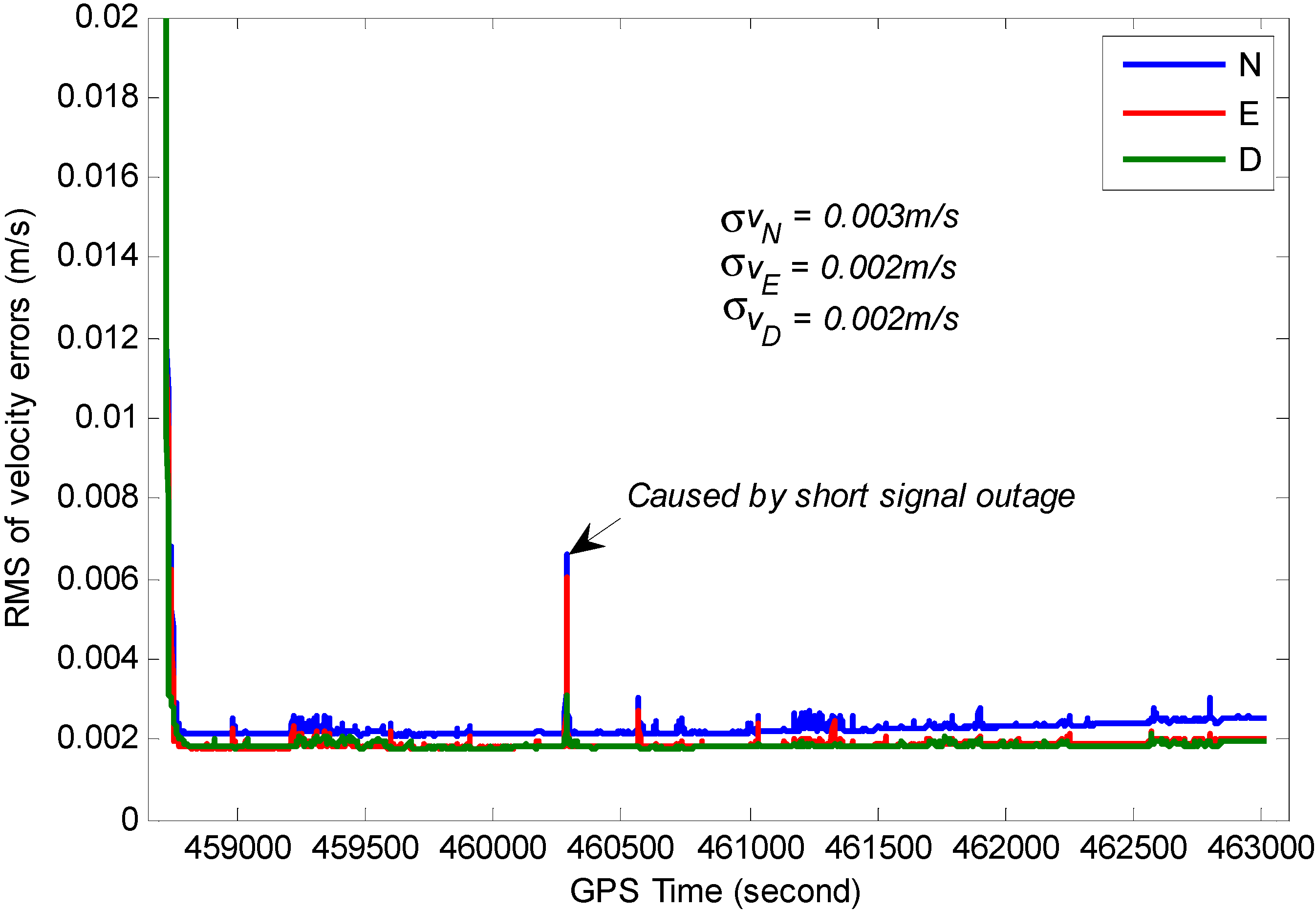
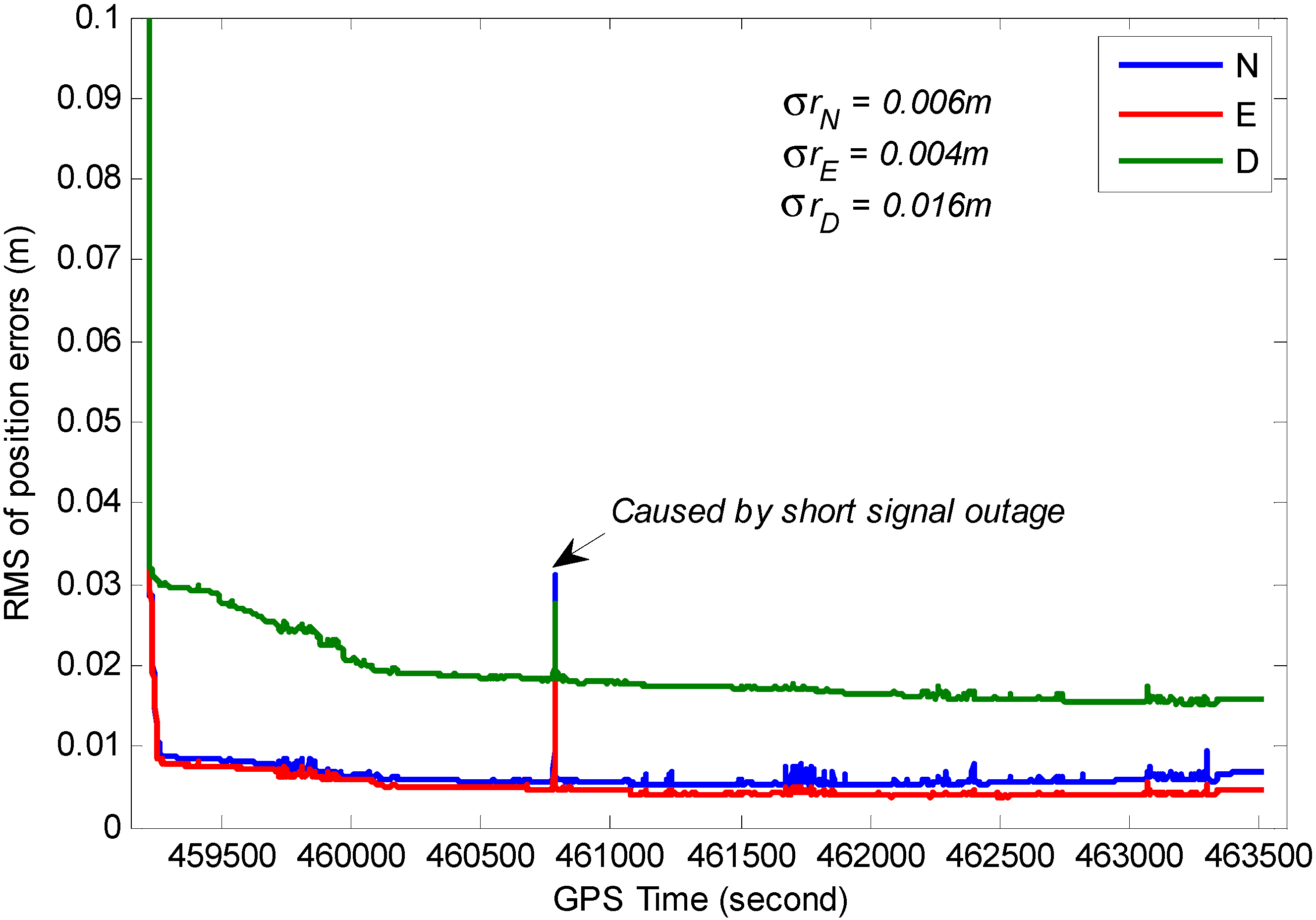
Figure 19. From these figures, we can see the estimated position accuracy for horizontal components is better than 1 cm, whereas vertical component position accuracy is generally better than 2 cm. It can be seen that an abrupt change occurs in the RMS time-series, this is caused by GNSS signal lock-loss. The estimated velocity accuracy is generally better than 3 mm/s. The achievable attitude accuracy for pitch and roll component reach 13 arc seconds, while a much poorer performance can be obtained for the heading component for the test.
Figure 16.
Position differences between GPS/BDS/INS integration solution and GPS/BDS solution (20° cut-off elevation).
Figure 16.
Position differences between GPS/BDS/INS integration solution and GPS/BDS solution (20° cut-off elevation).
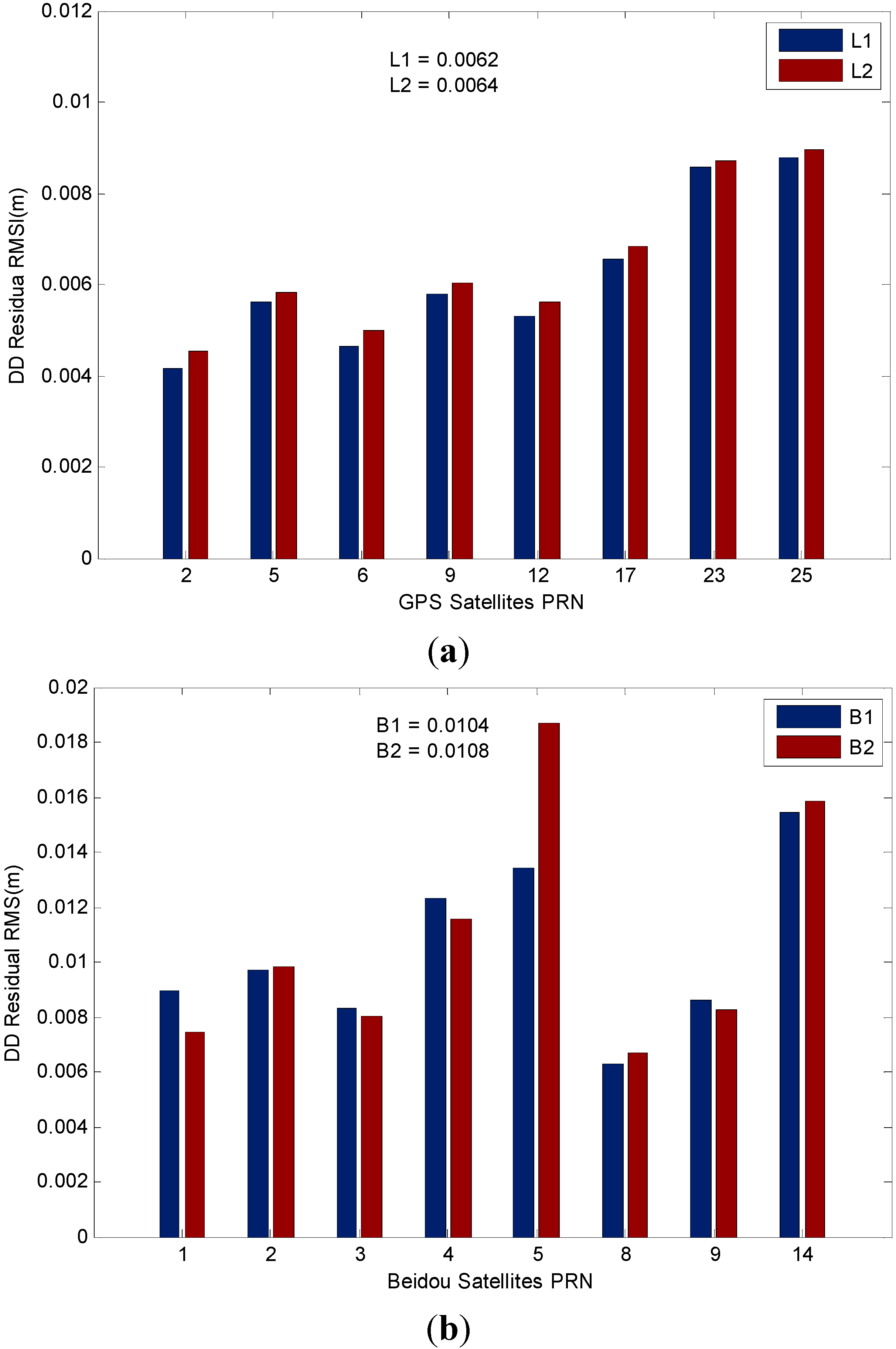
We also illustrate the positioning performance of the GPS and BDS system in the GPS/BDS/INS tightly integrated navigation system by analyzing the residual of the measurements. The RMS value statistics of L1 (B1) carrier-phase residual when ambiguities are fixed are illustrated in
Figure 20. The average RMS values are 6.2 and 6.4 mm for GPS L1 and L2 carrier-phase, respectively. The low elevation angle GPS satellites (G23, G25) have larger residuals which may be affected by multipath errors. For BDS satellite system, the RMS values for B1 and B2 carrier phase are up to 10.4 and 10.8 mm, respectively, it is slightly worse than the GPS ones, we can also find that residuals are varied with the type of satellites, among which the IGSO satellites have better performance in this study, the only MEO satellite C14 has the worst performance, and B2 residuals of GEO satellite C05 are apparently larger than the B1 residual due to the measurement fluctuations.
Figure 17.
RMS of the estimated position errors.
Figure 17.
RMS of the estimated position errors.
Figure 18.
RMS of the estimated velocity errors.
Figure 18.
RMS of the estimated velocity errors.
Figure 19.
RMS of the estimated attitude errors.
Figure 19.
RMS of the estimated attitude errors.
Figure 20.
(a) RMS values of GPS DD residual; (b) RMS values of BDS DD residual.
Figure 20.
(a) RMS values of GPS DD residual; (b) RMS values of BDS DD residual.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}