
Hysteresis Analysis and Positioning Control for a Magnetic Shape Memory Actuator

Abstract
:1. Introduction
2. MSM Actuator Overview
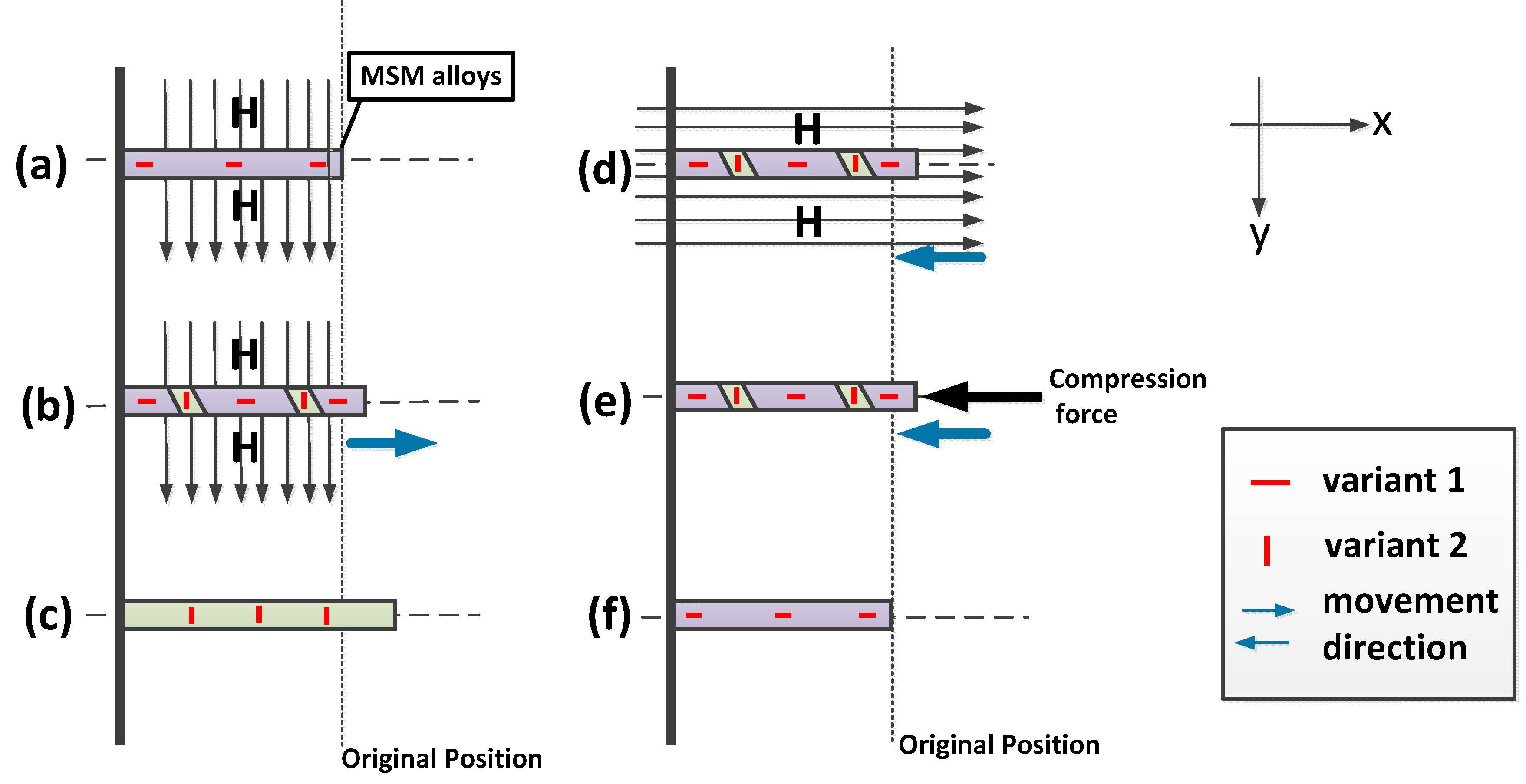
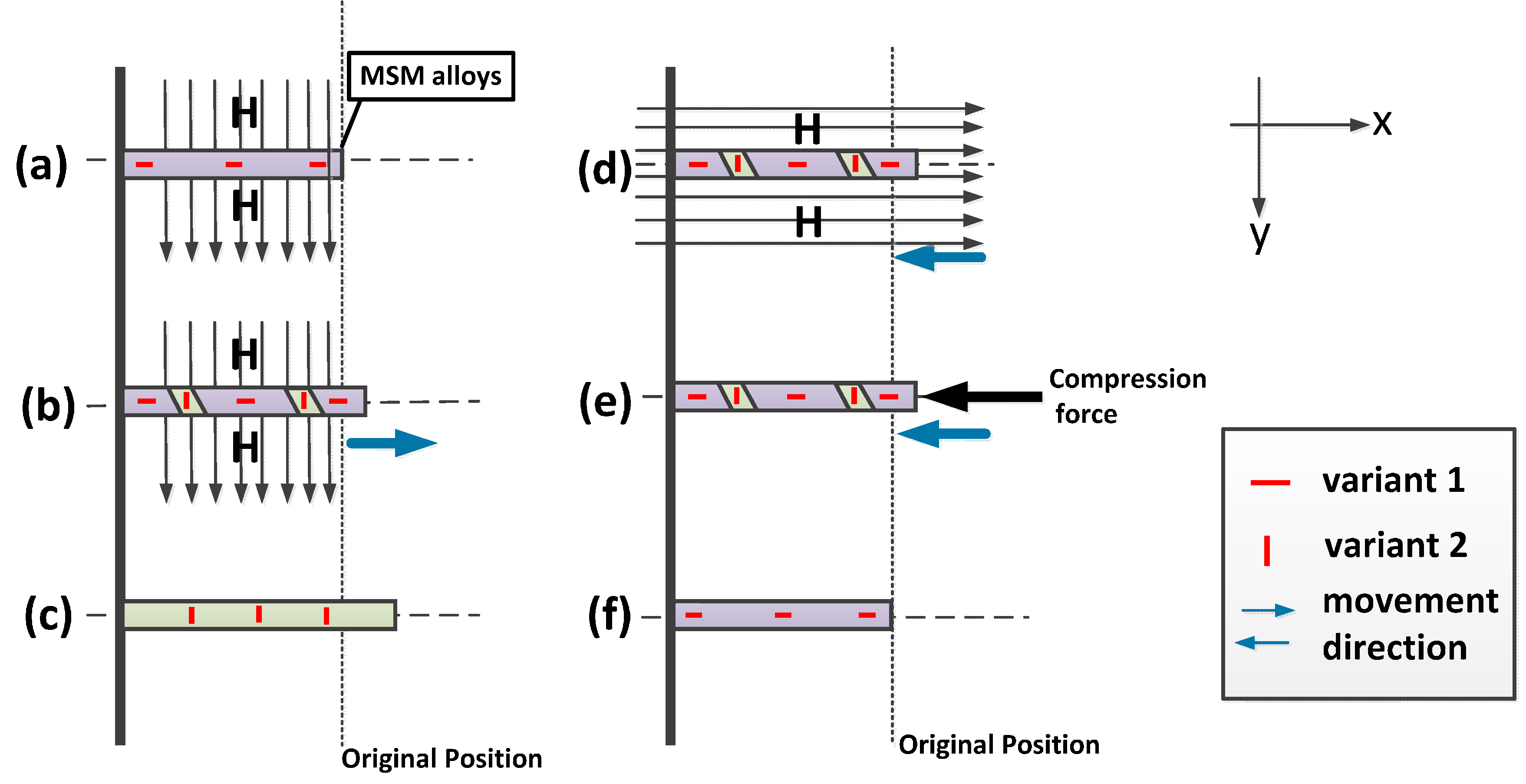
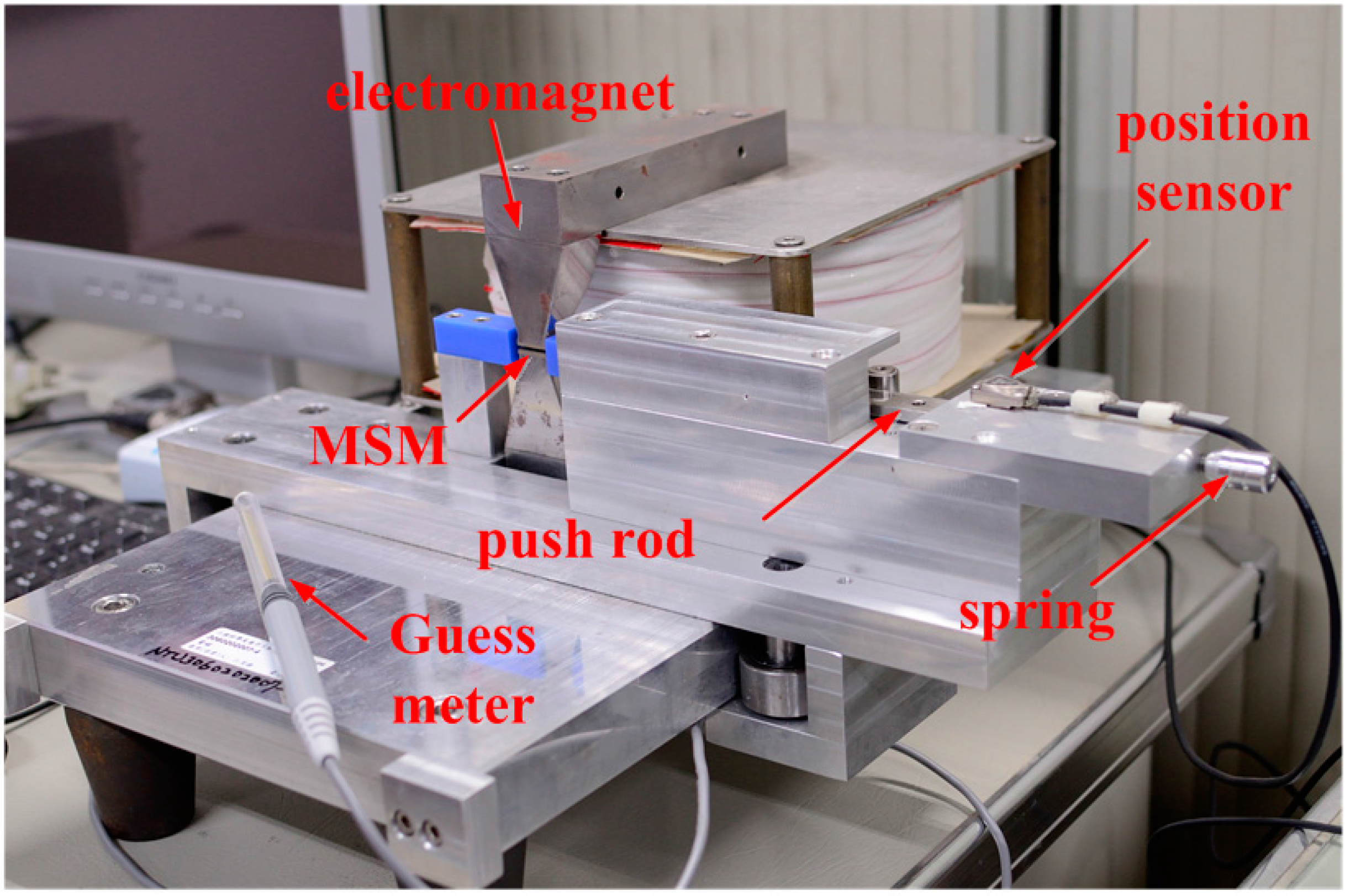
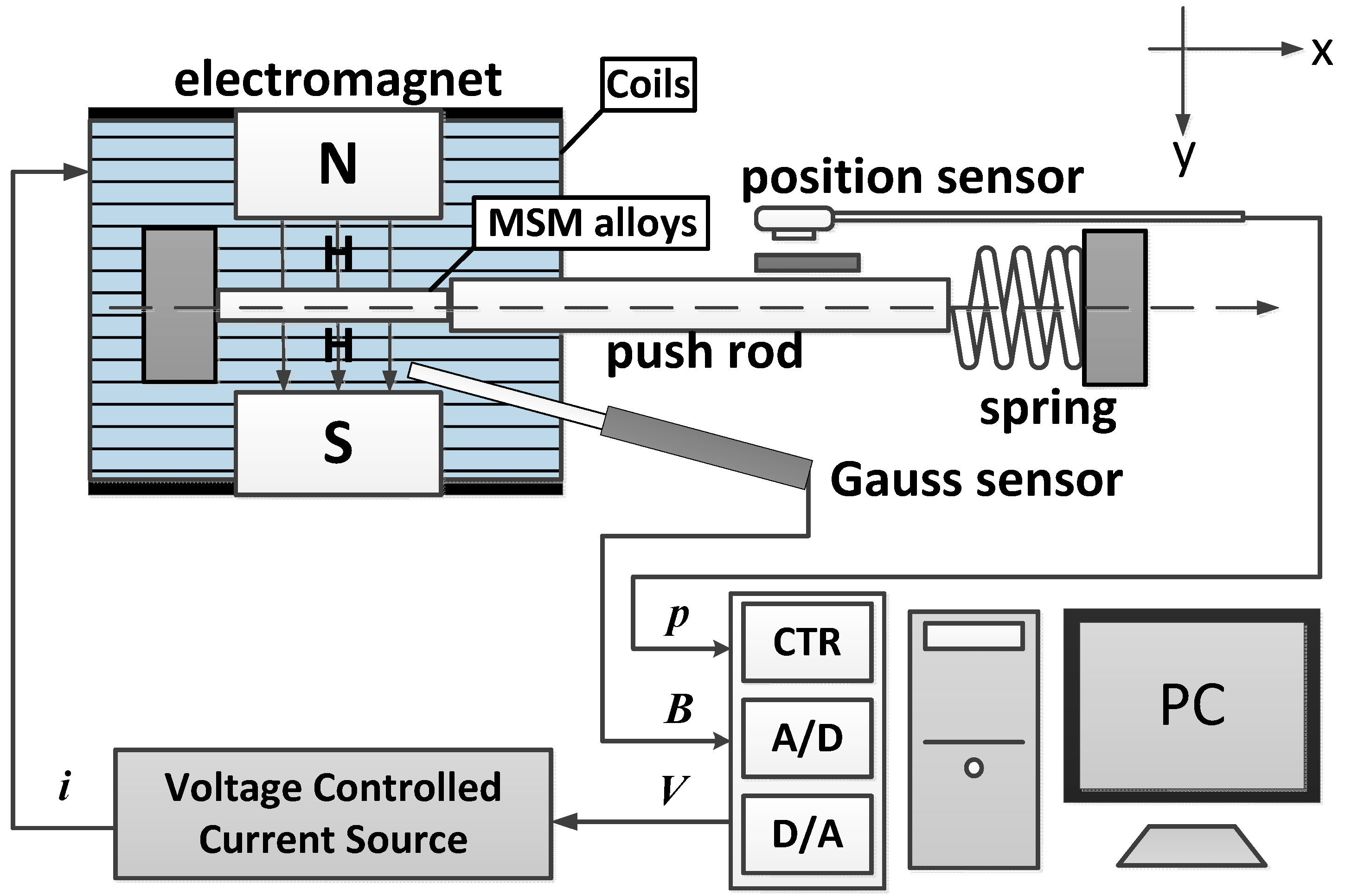
2.1. Mechanism Description
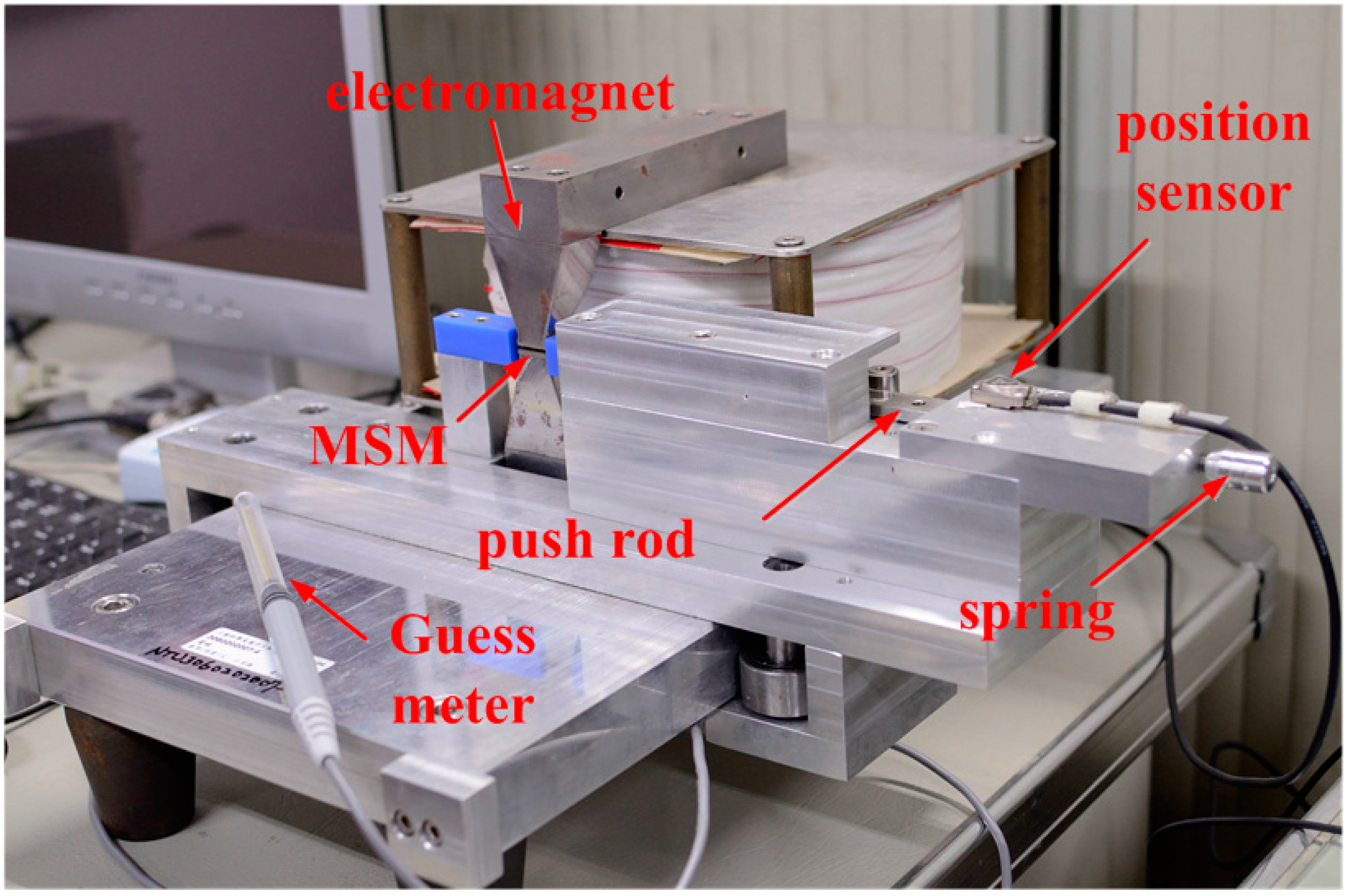
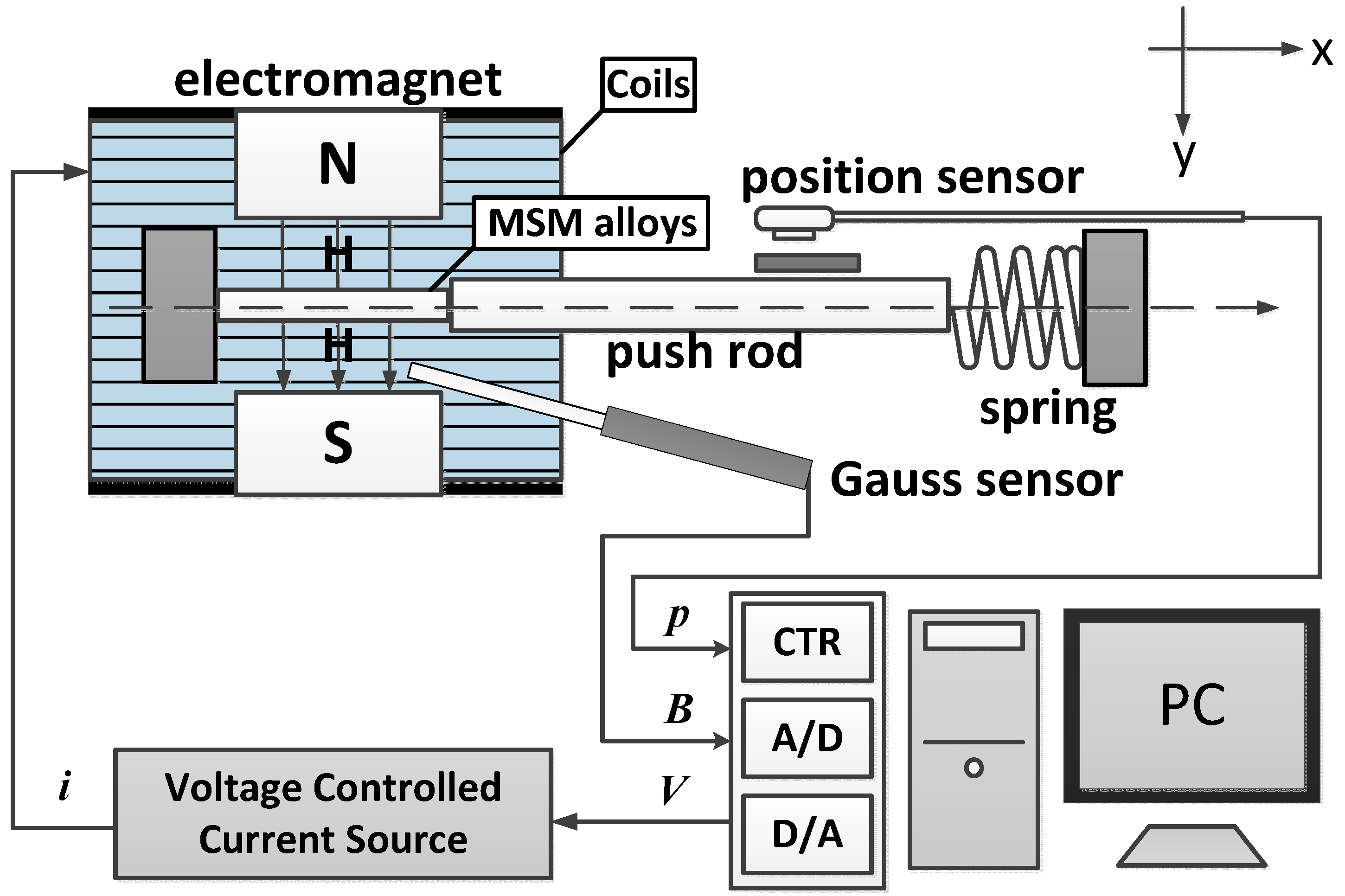
2.2. Test Rig Layout

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Specifications |
|---|---|
| PC-based controller | CPU Pentium 4; 16 bits ADC × 16 CH; 16 bits DAC × 2 CH; Digital I/O × 24 CH; 32 bits counter × 2 CH |
| Power supply | Power: 360 W; Voltage range: 0~80 V; Current range: 0~13.5 A; Voltage Controlled Current Source mode: 1.35 A/1 V |
| Gauss sensor | Range: 0.000~±3.000 Tesla; Frequency Range: DC and 15 Hz to 10 kHz; Analogue Output: ±3 V full scale |
| Optical encoder | Range: 25 mm; Resolution: 20 nm |
| Spring | Spring Constant: 3.5 N/mm |
| MSM element | Element size: 20 mm × 2.5 mm × 1.0 mm Large strain: typically 3%–5%, up to 6% Max. magnetic field 700 mT |
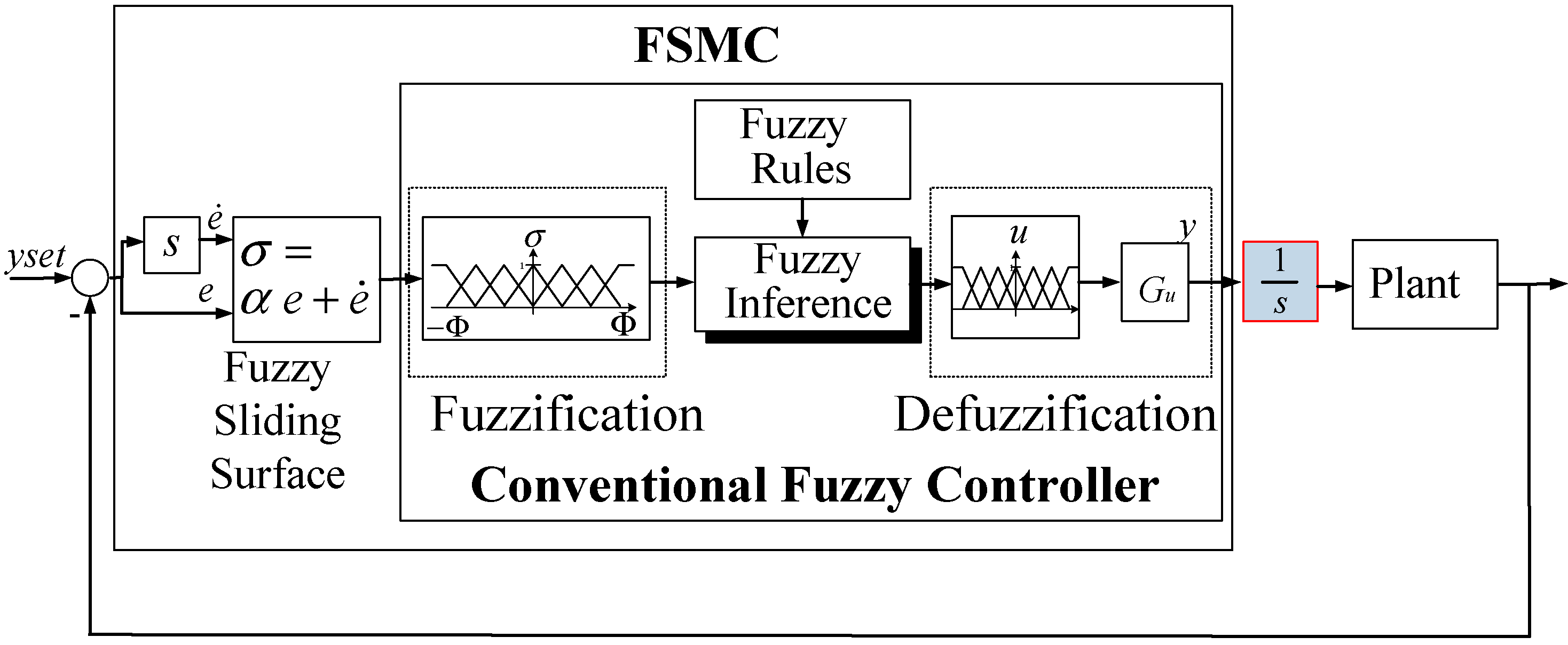
3. Modified Fuzzy Sliding Mode Control Concept
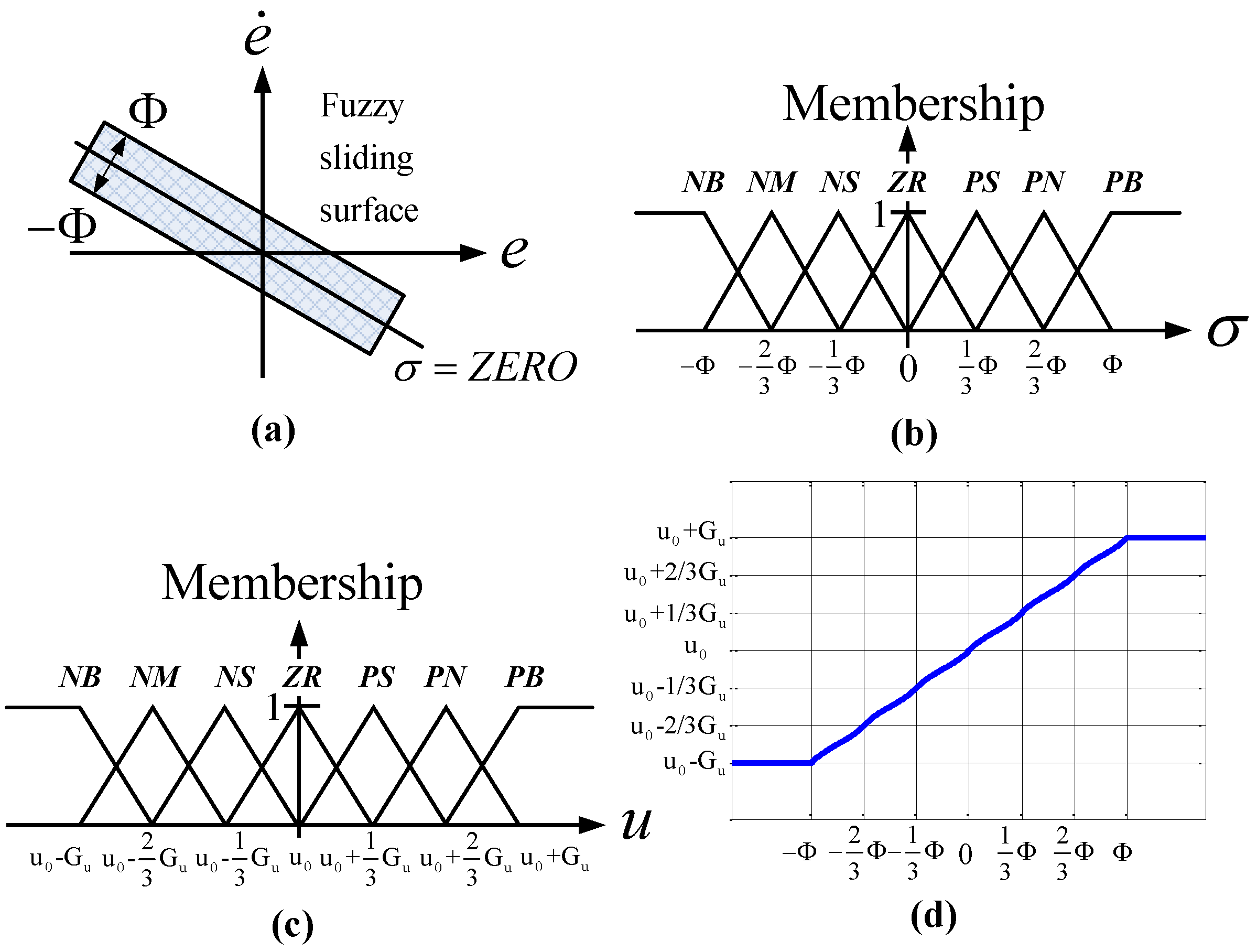
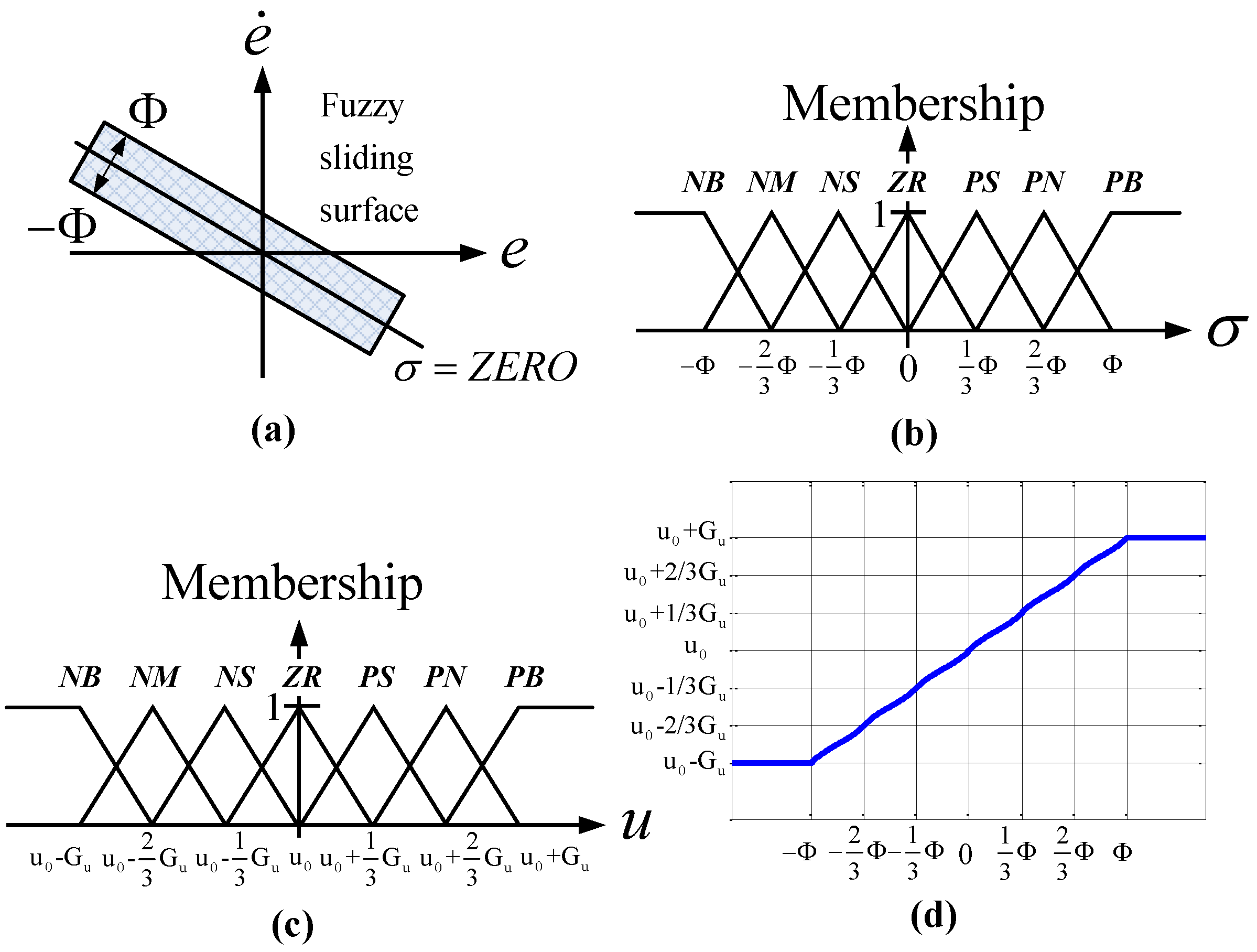
3.1. Modified Fuzzy Sliding Mode Control Theory
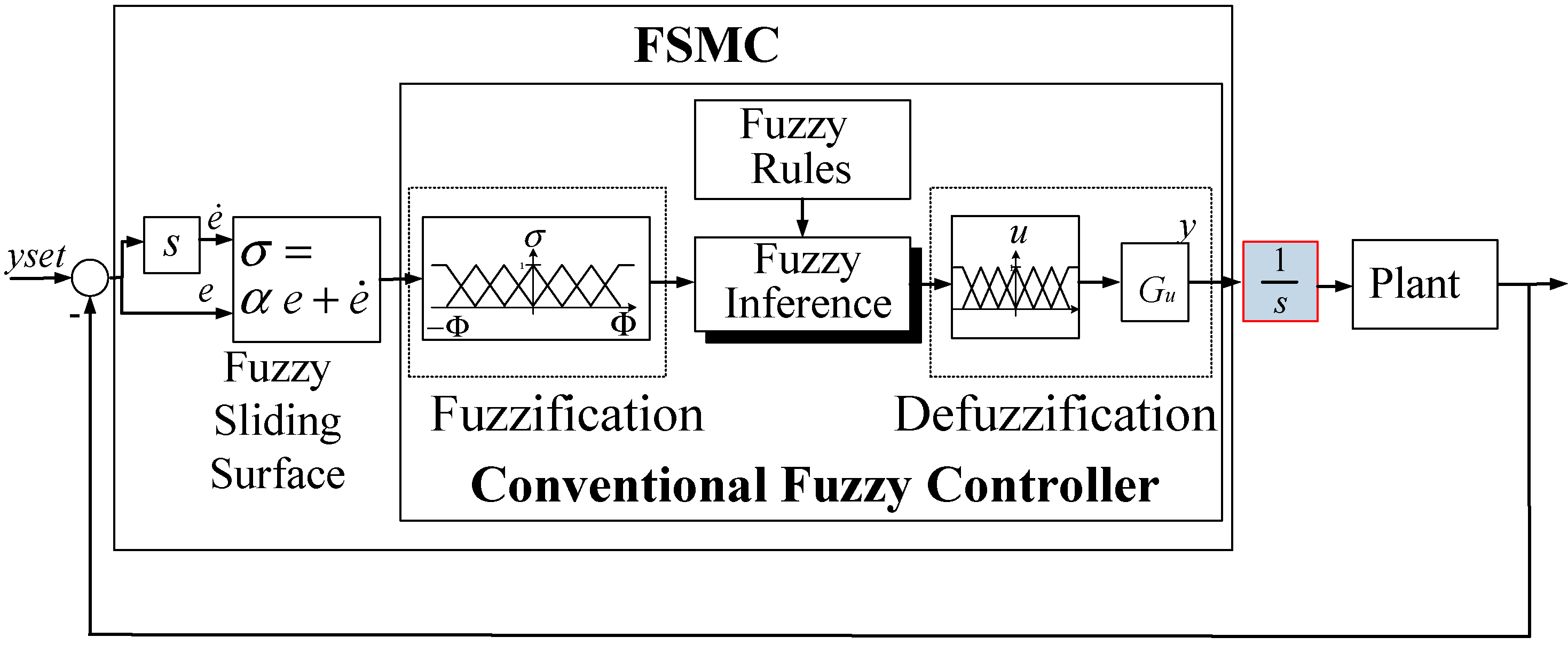
3.2. Designing MFSMC for Positioning Controller
| Rules | Description |
|---|---|
4. Experiments
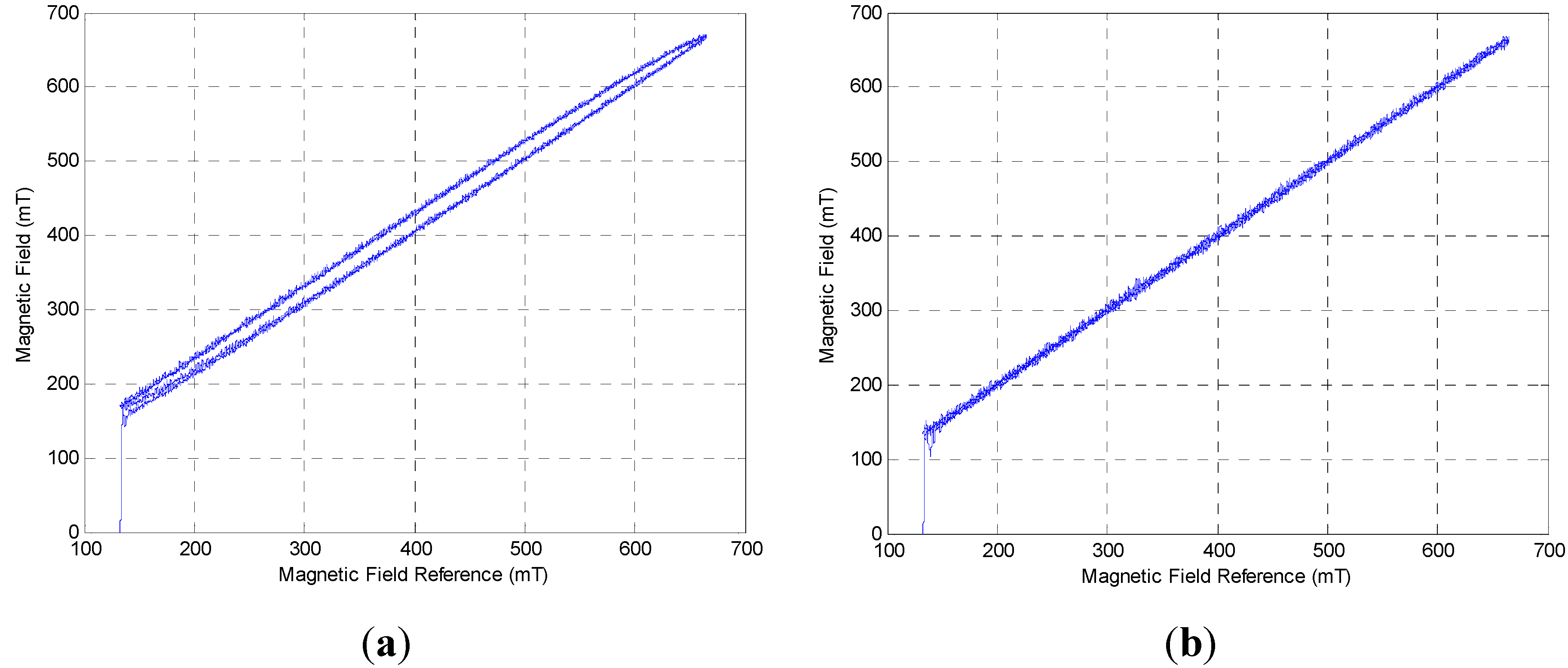
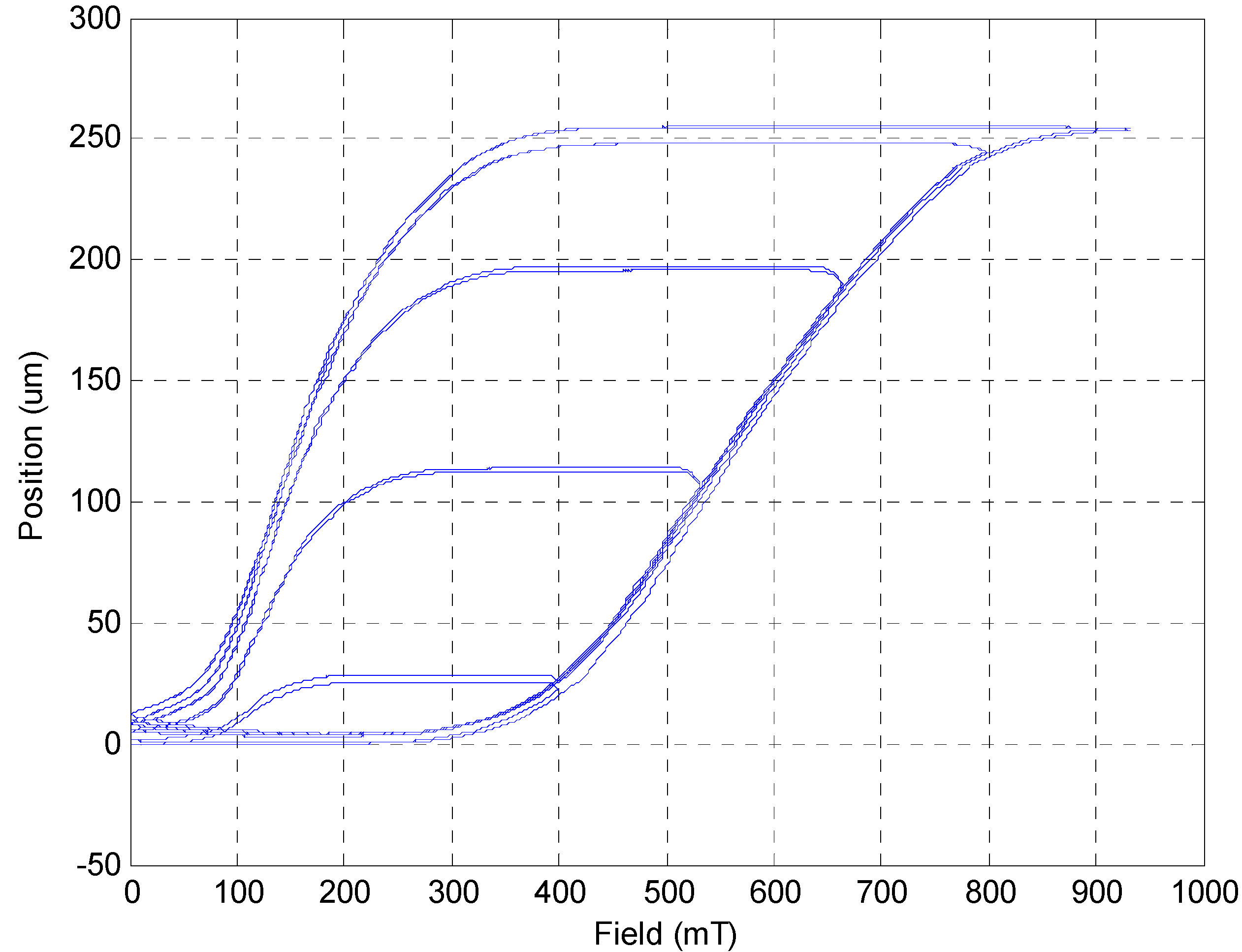
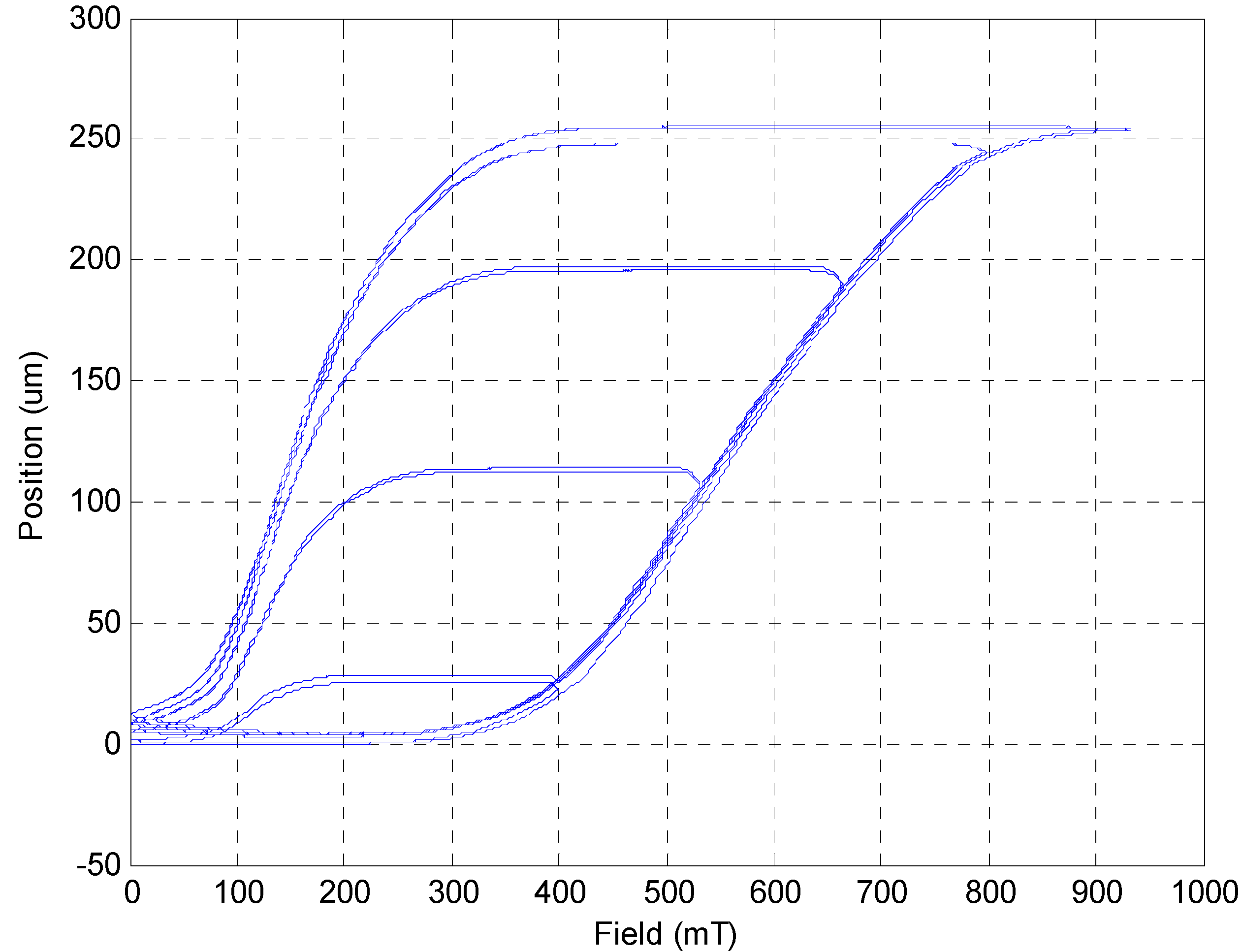
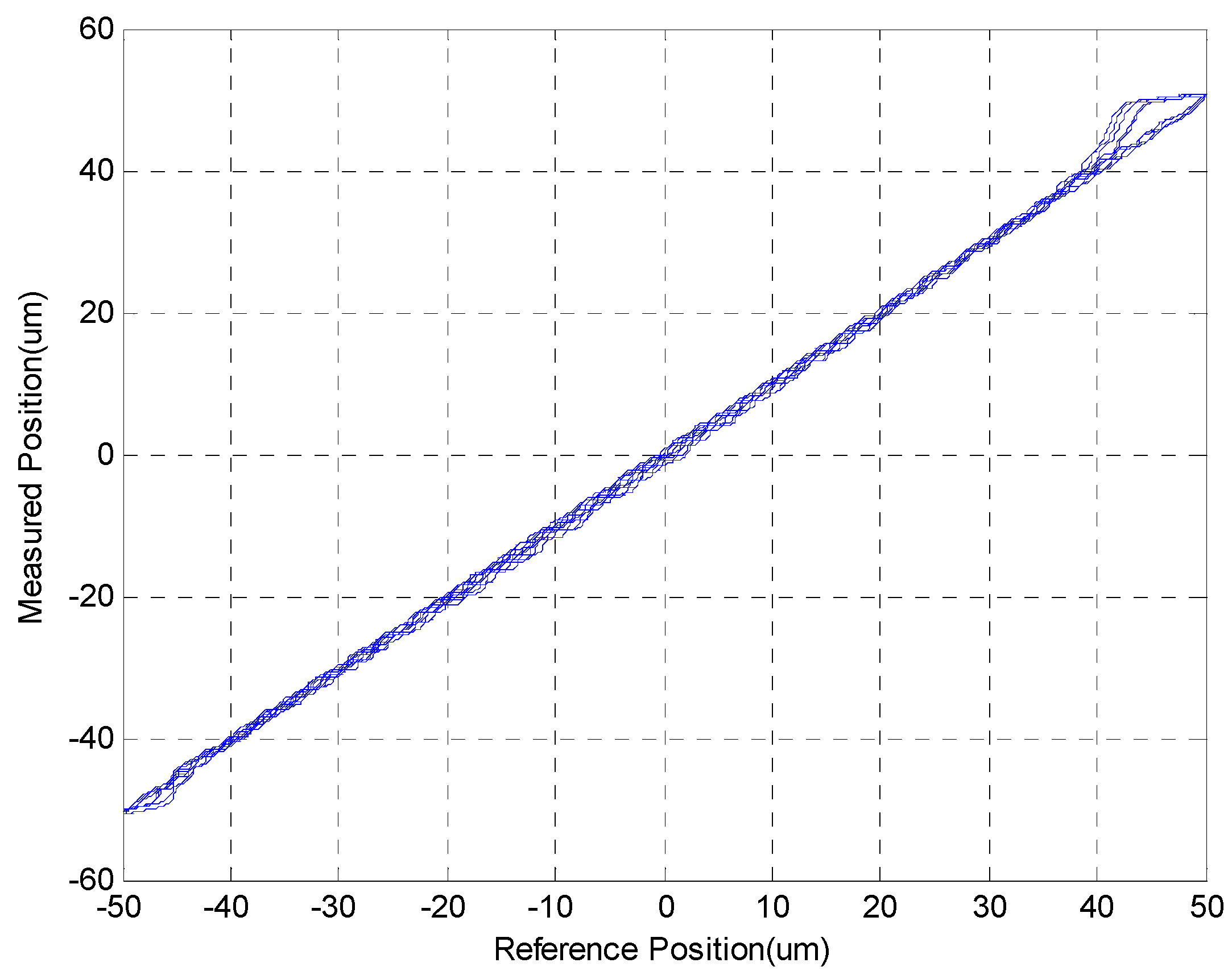
4.1. Hysteresis Test

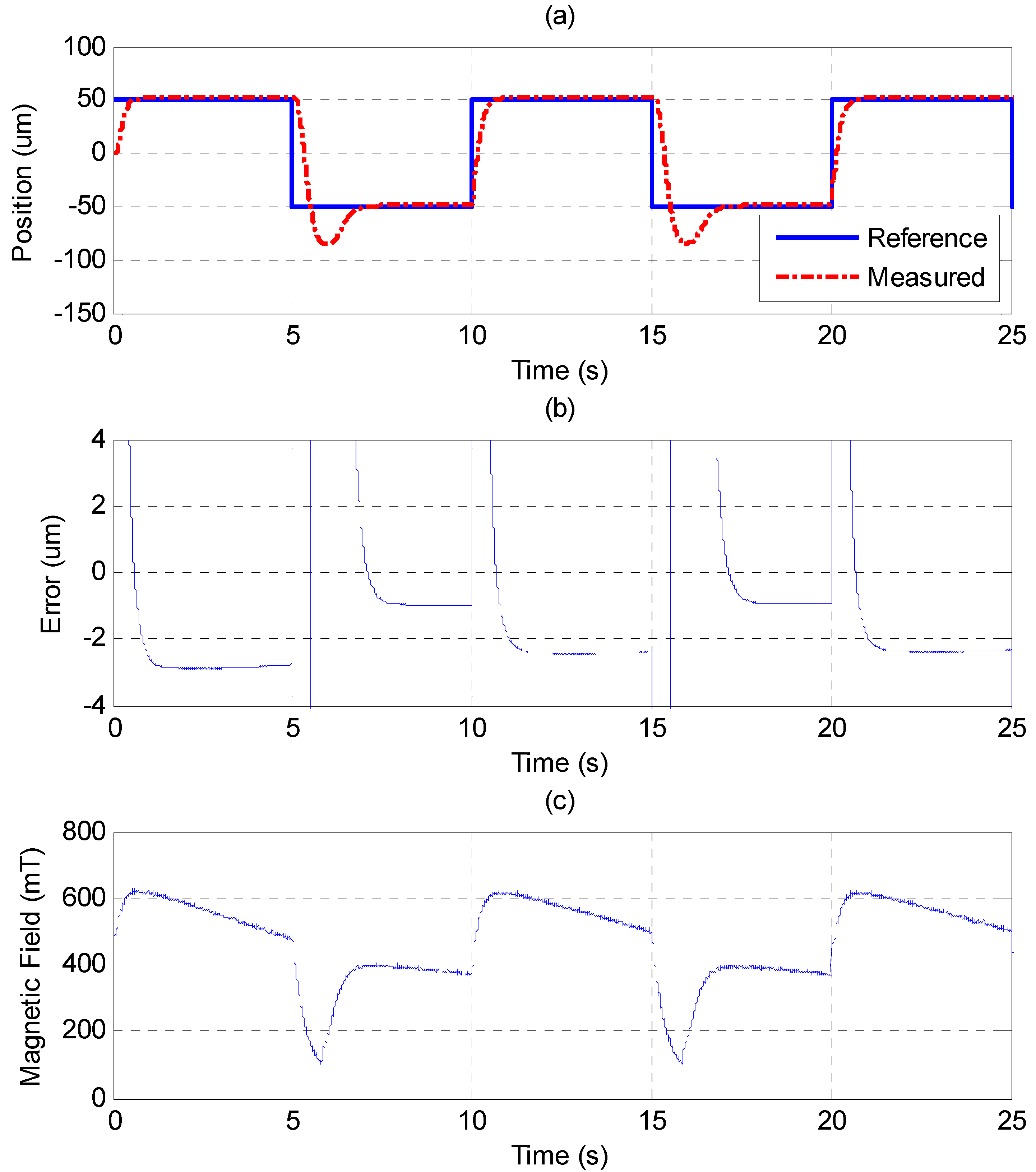
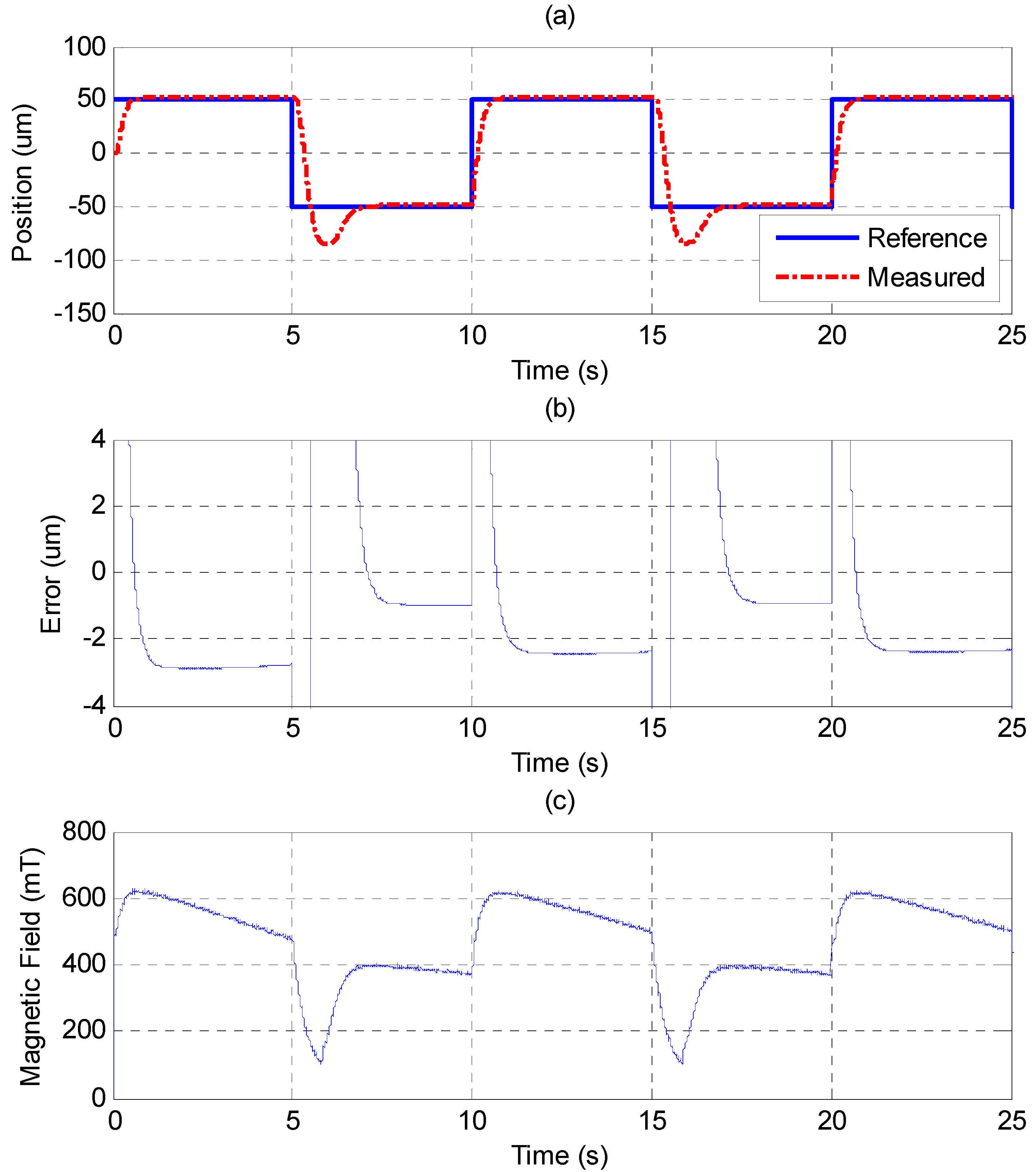
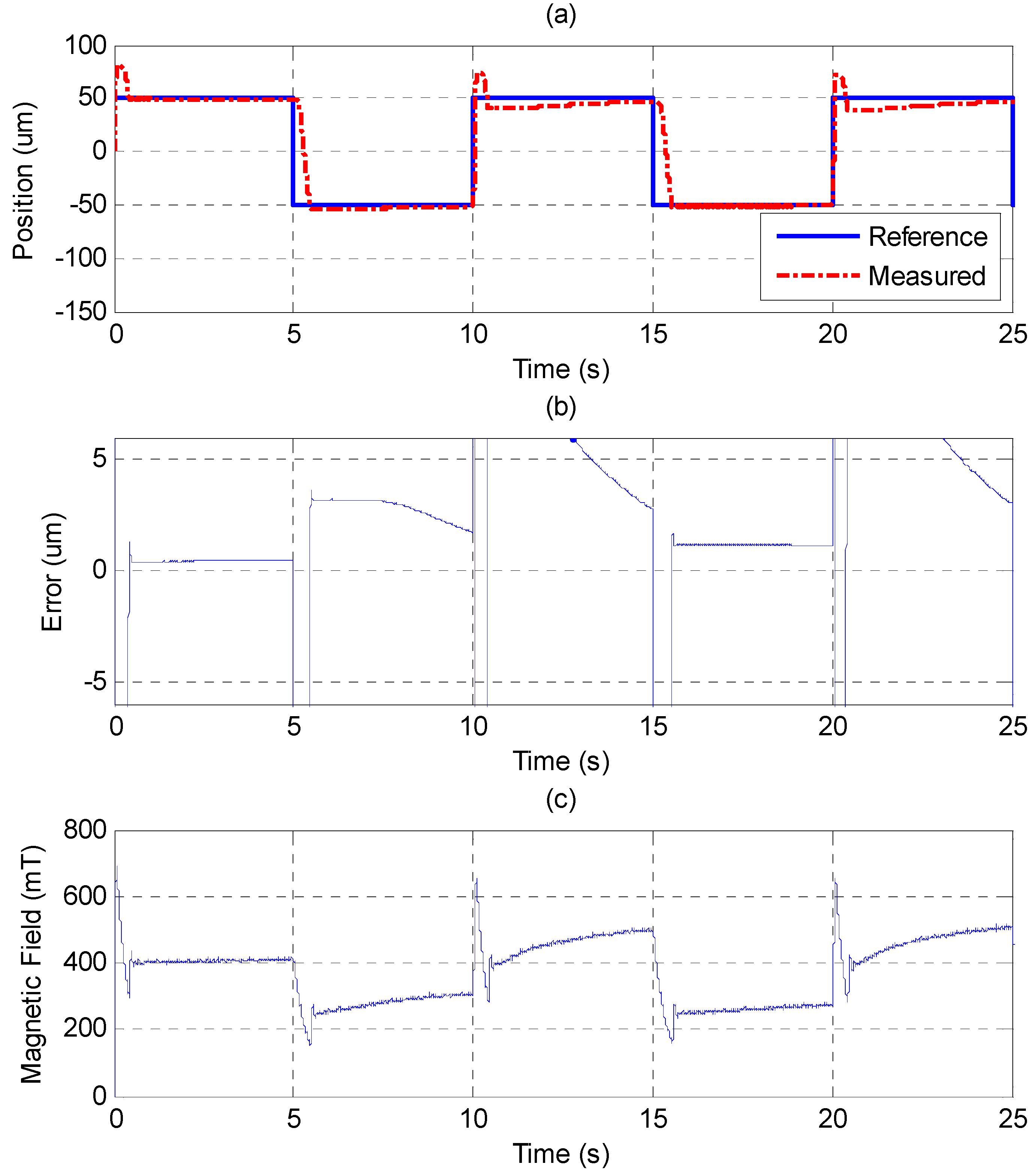
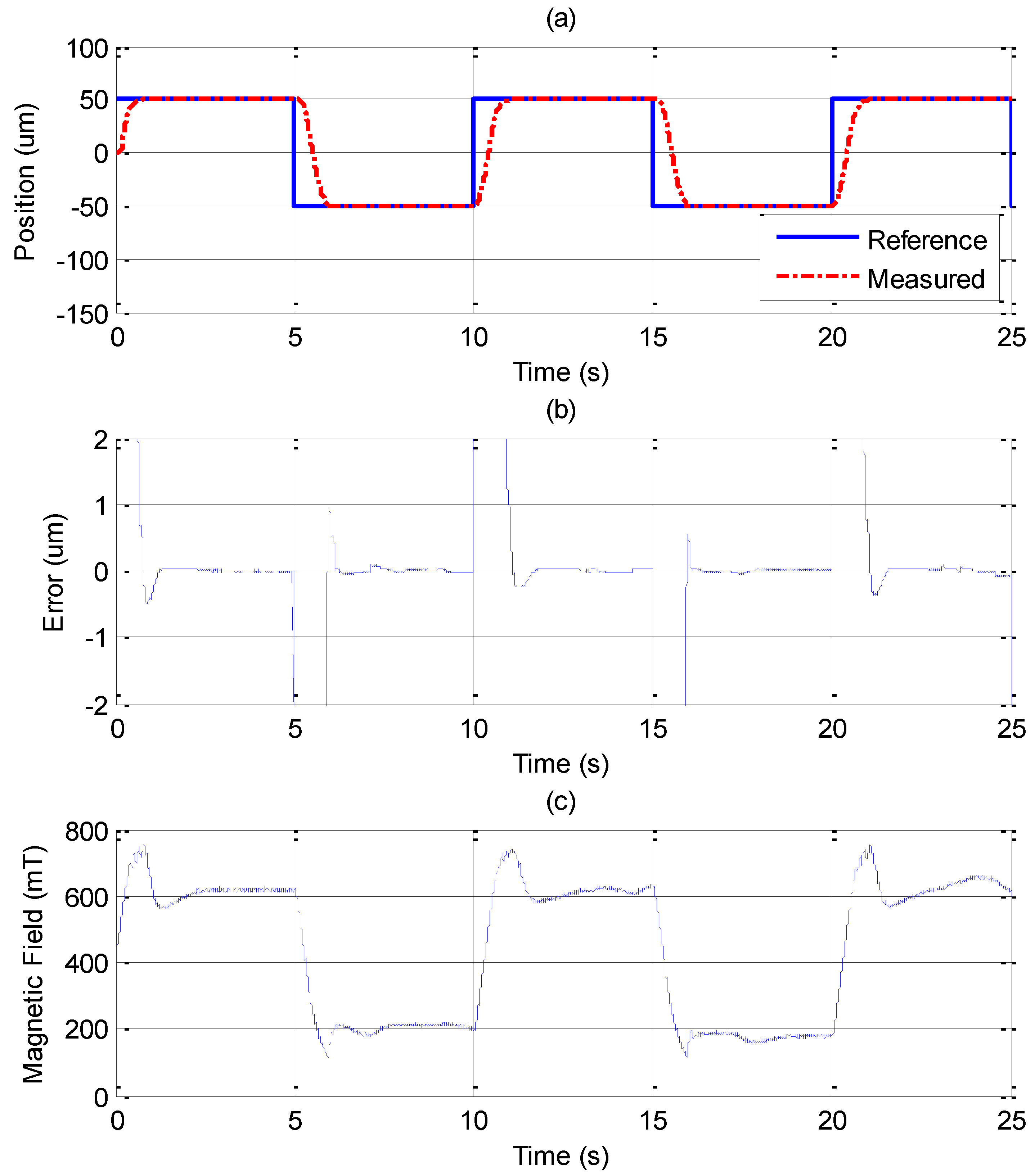
4.2. Step Response in Closed-Loop Control
| Step Response | Sine Wave Trajectory | |
|---|---|---|
| uo | 3.1 | 3.1 |
| σ | ||
| Φ | 0.33 | 1 |
| Gu | 6 | 2.3 |
| M(σ) | {−1, −0.67, −0.33, 0, 0.33, 0.67, 1} | {−1, −0.67, −0.33, 0, 0.33, 0.67, 1} |
| M(u) | {−6, −4, −2, 0, 2, 4, 6} | {−2.30, −1.53, −0.77, 0, 0.77, 1.53, 2.30} |
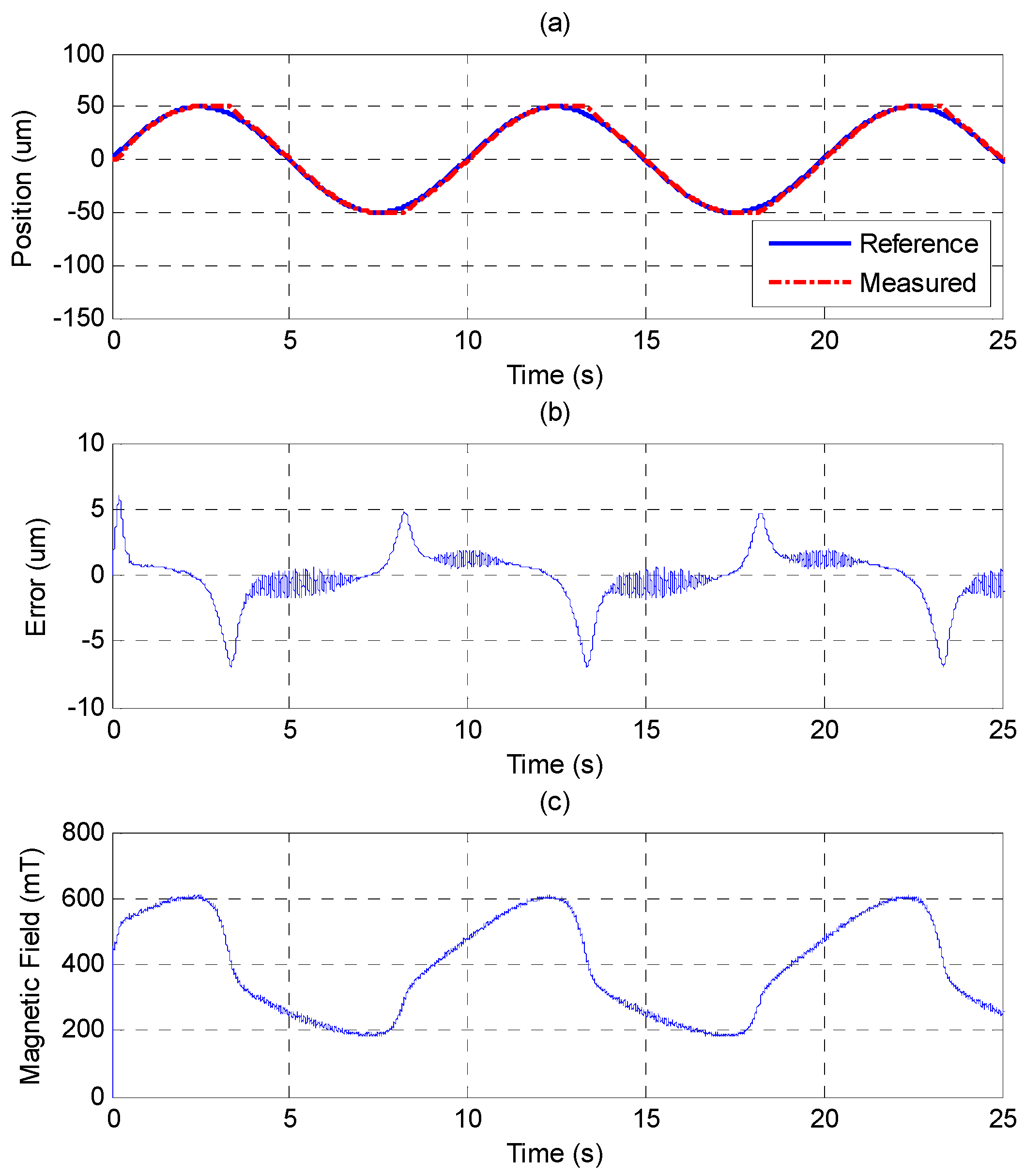
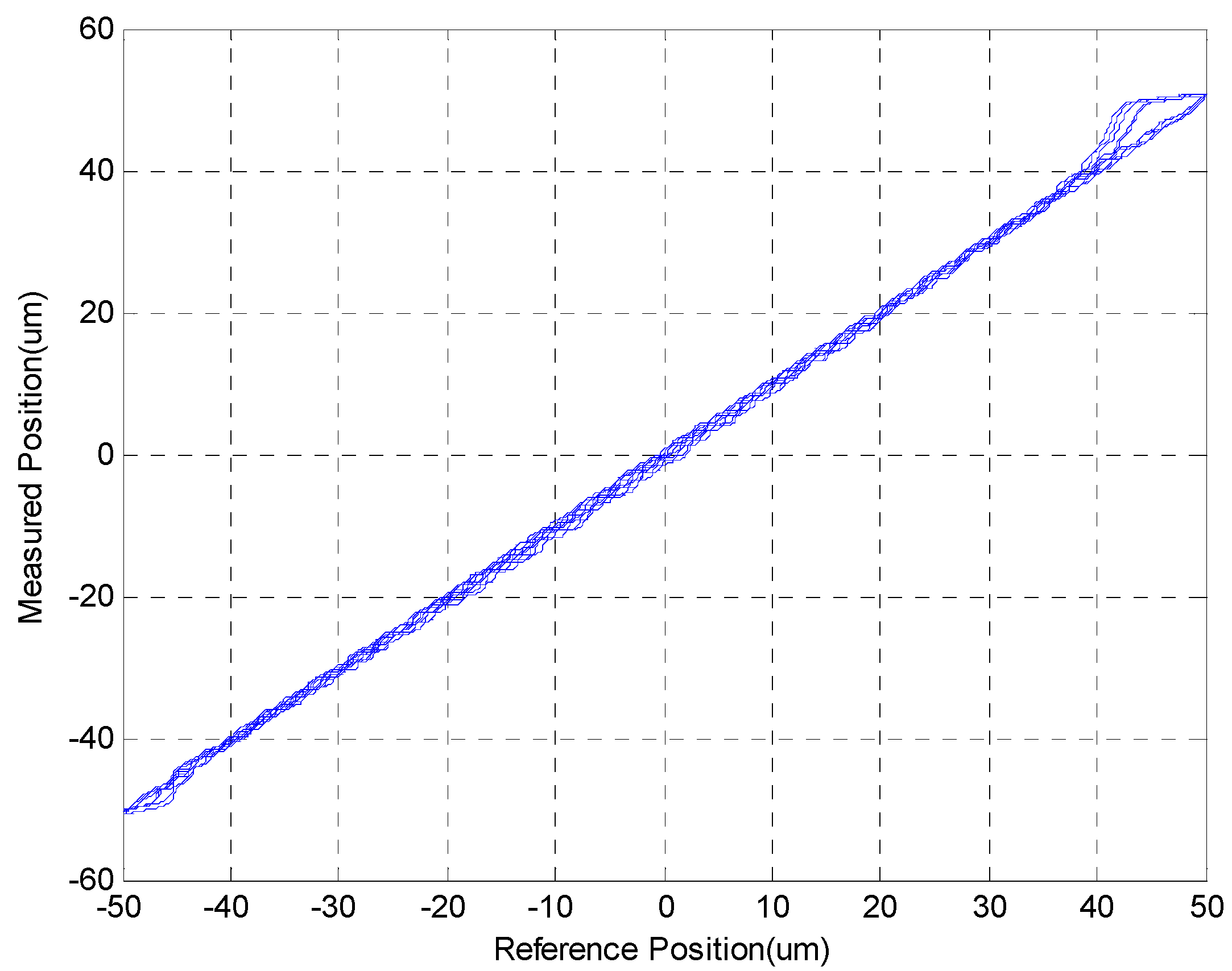
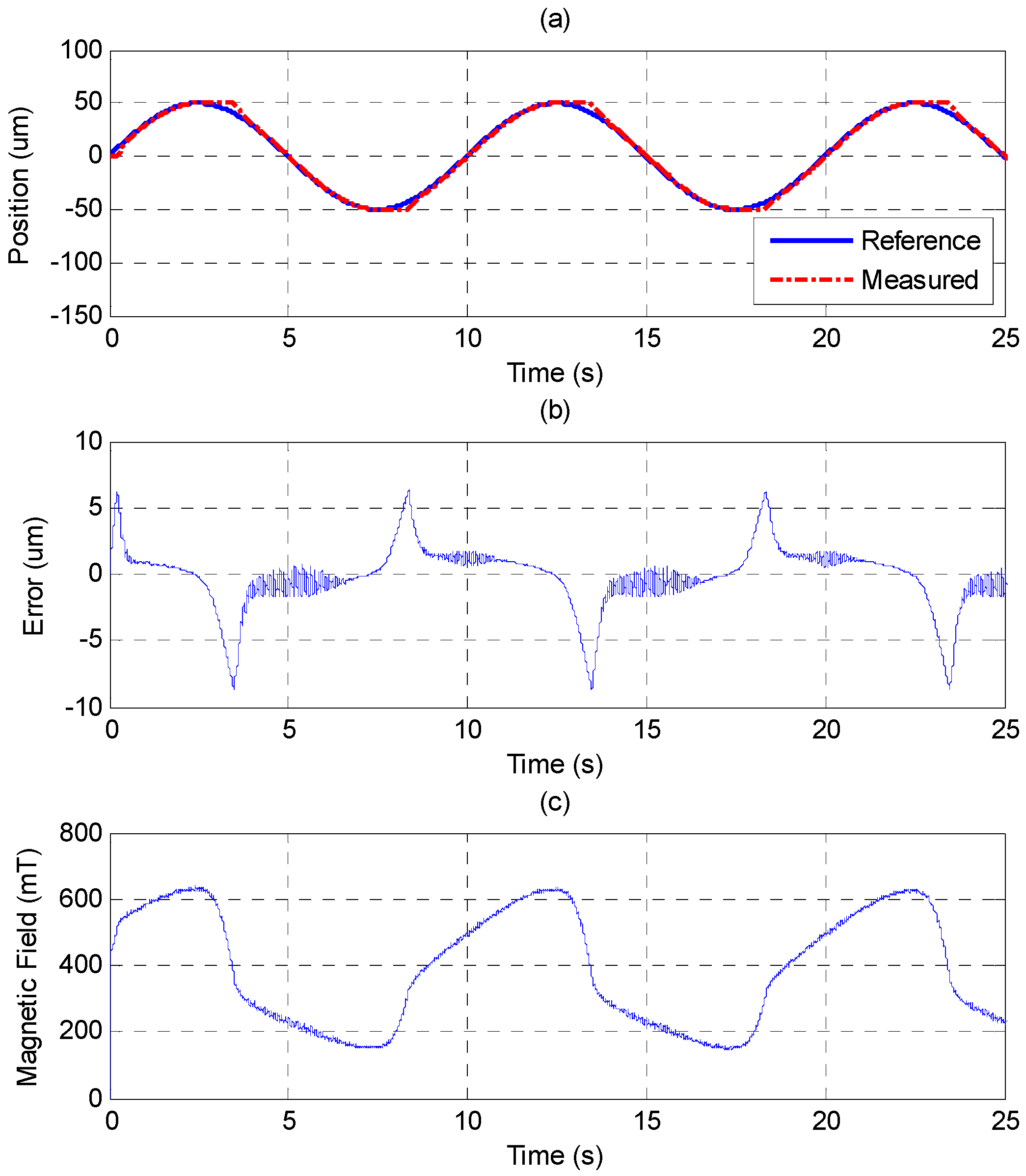
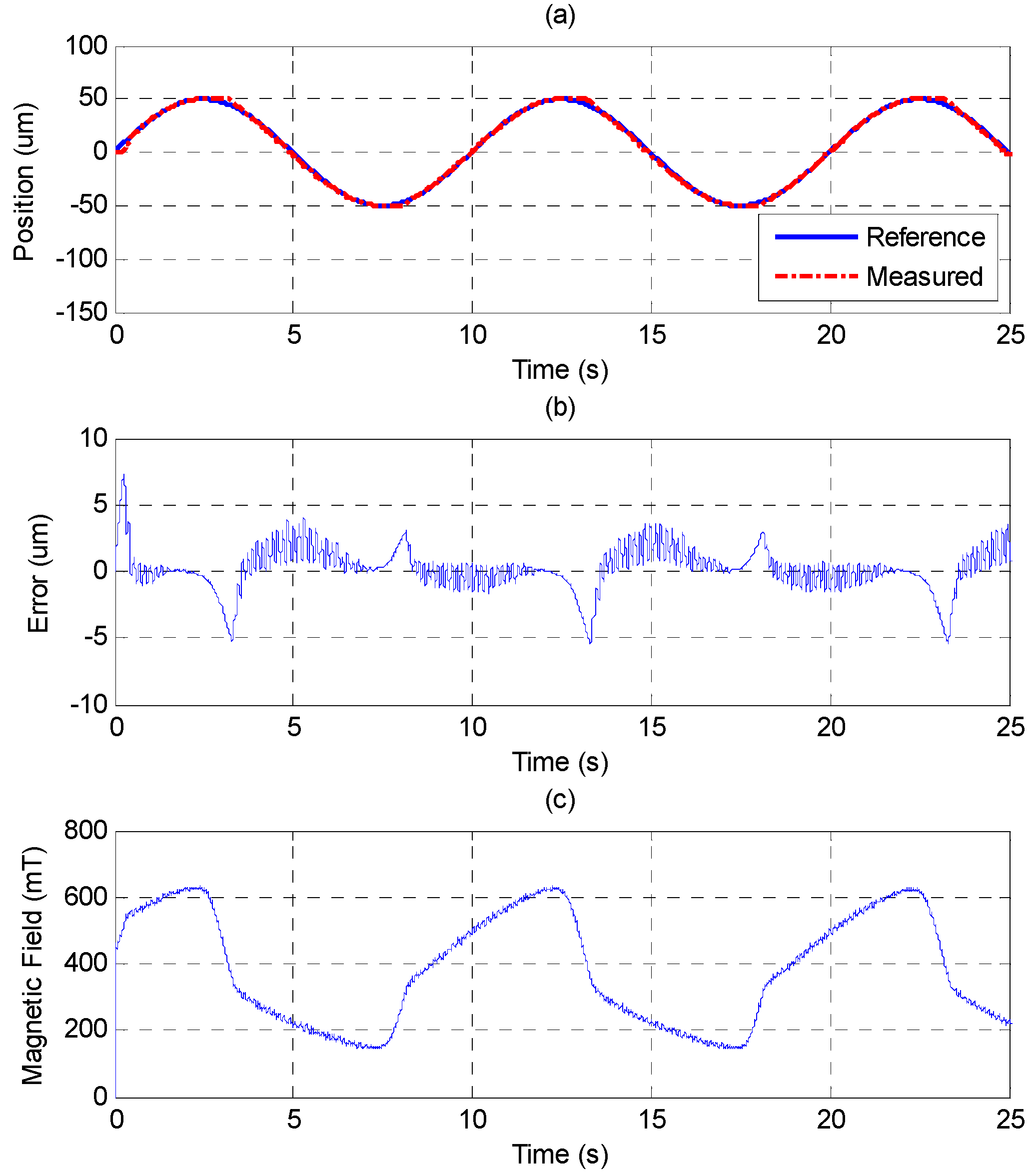
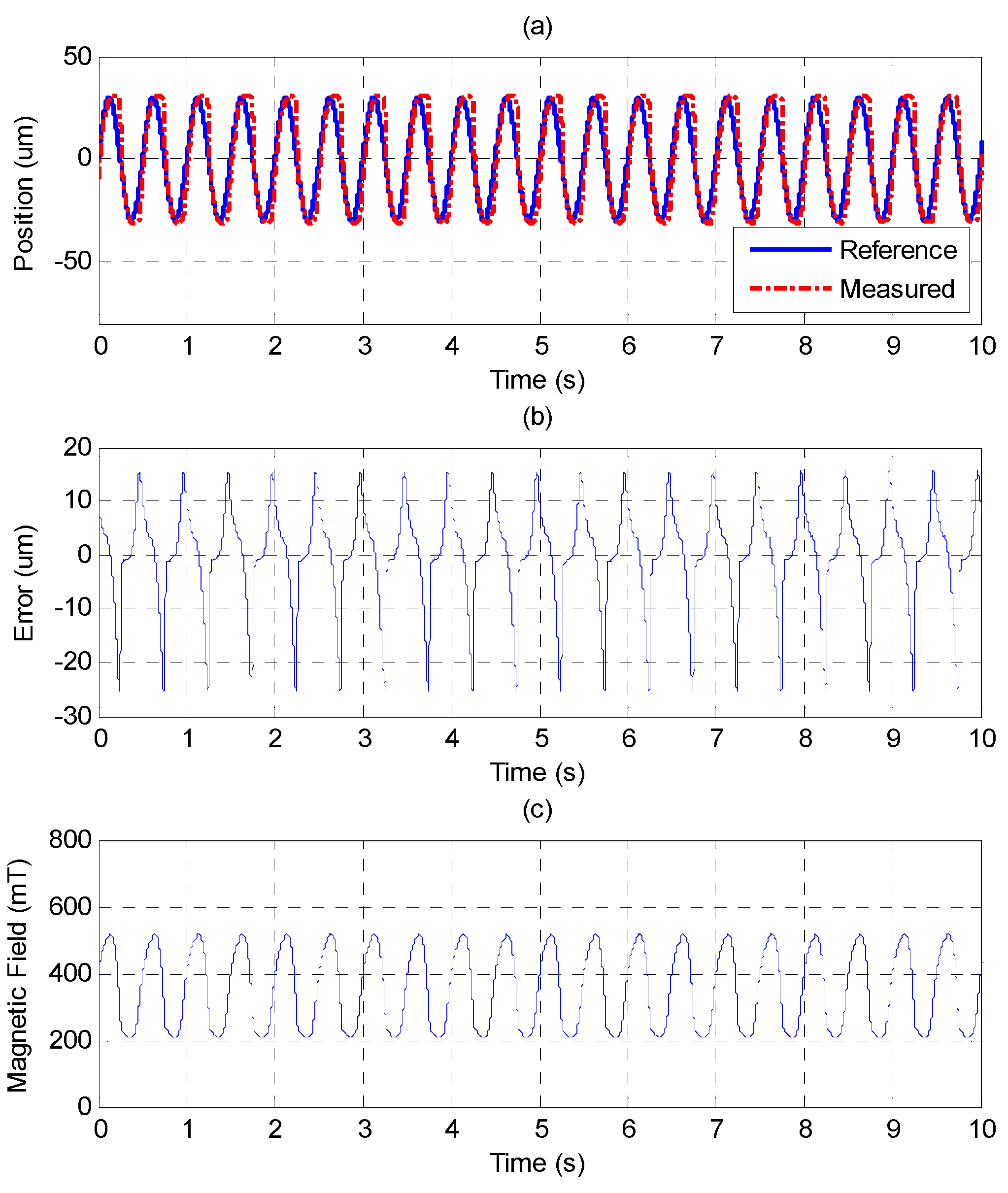
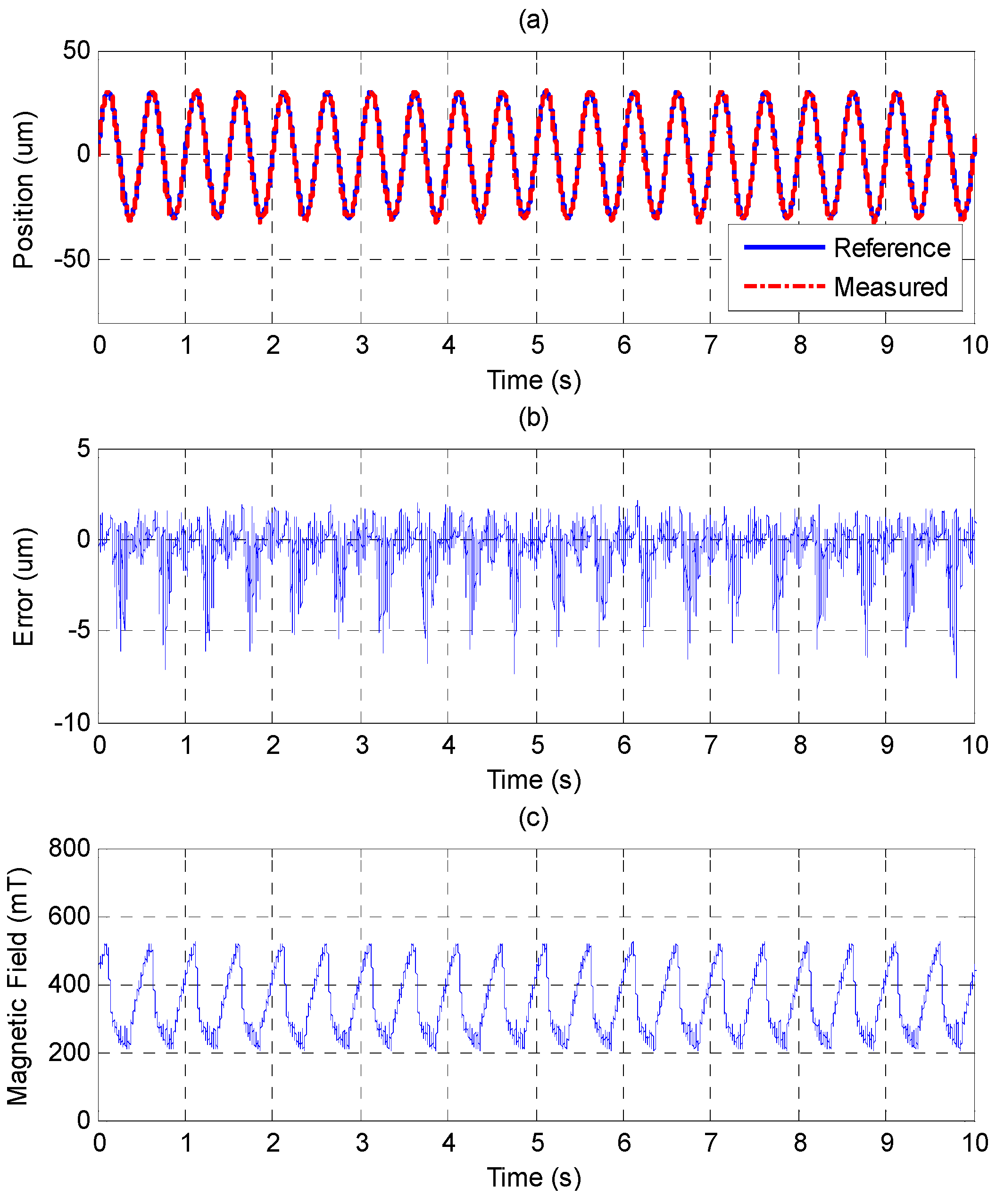
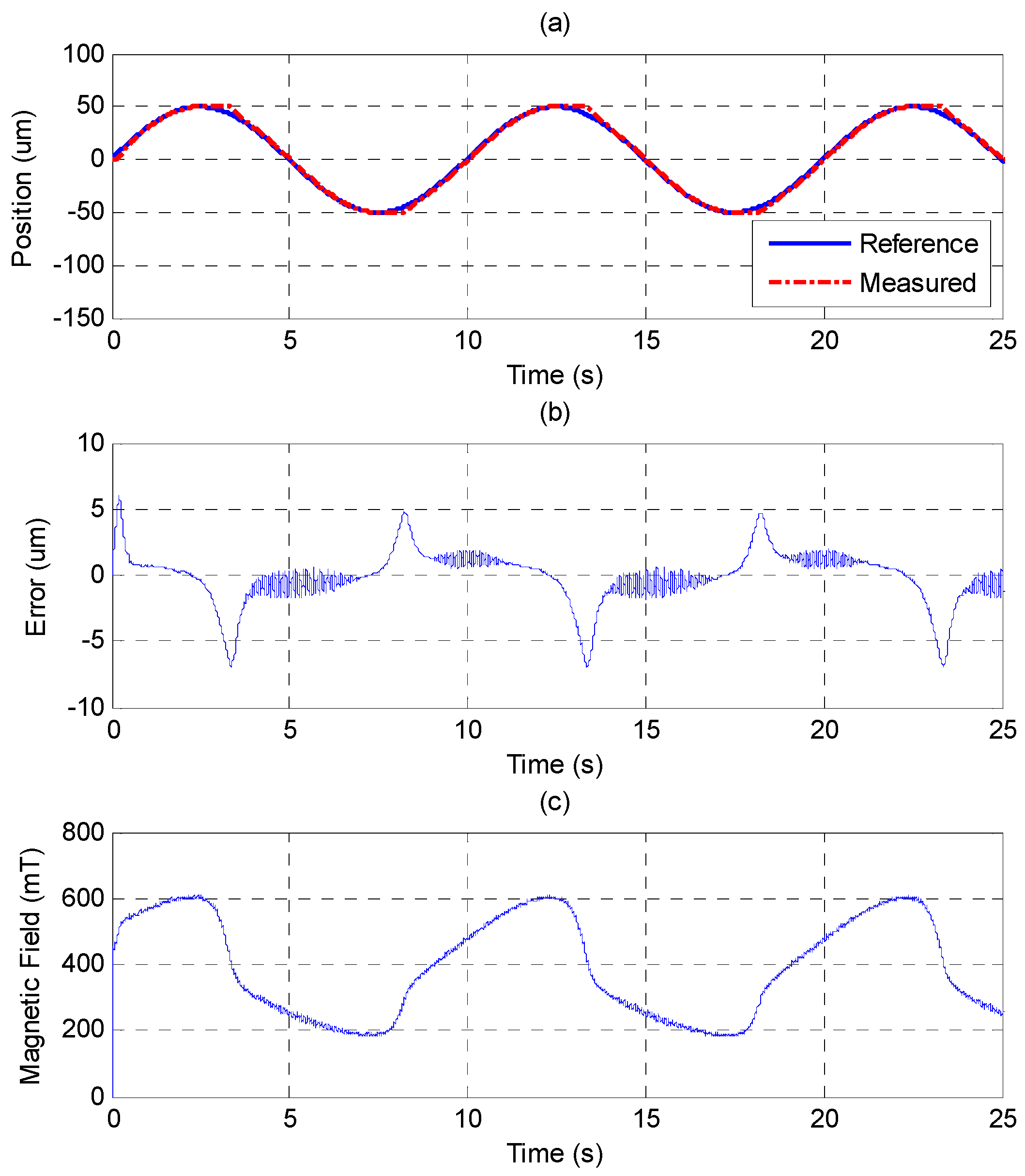
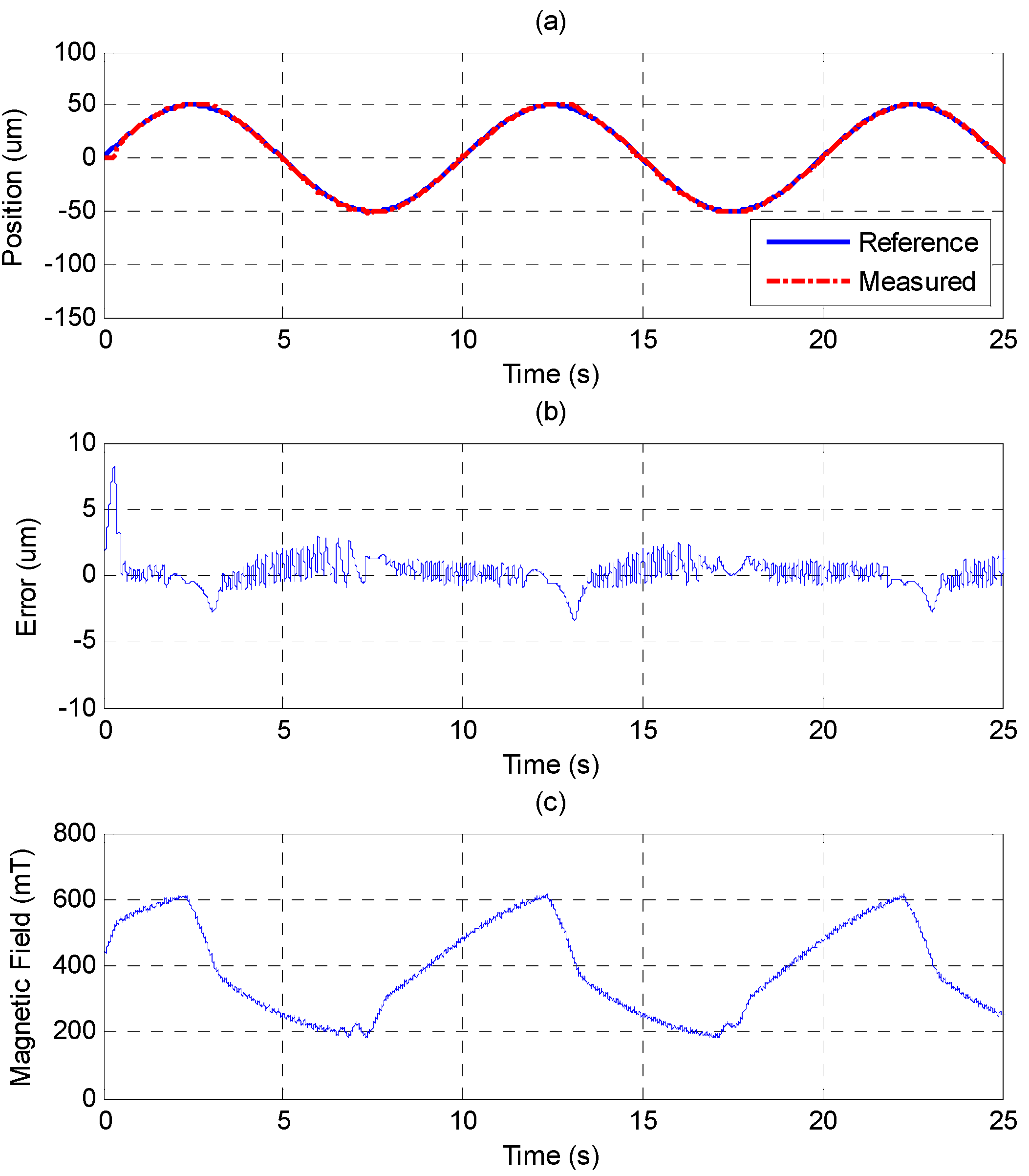
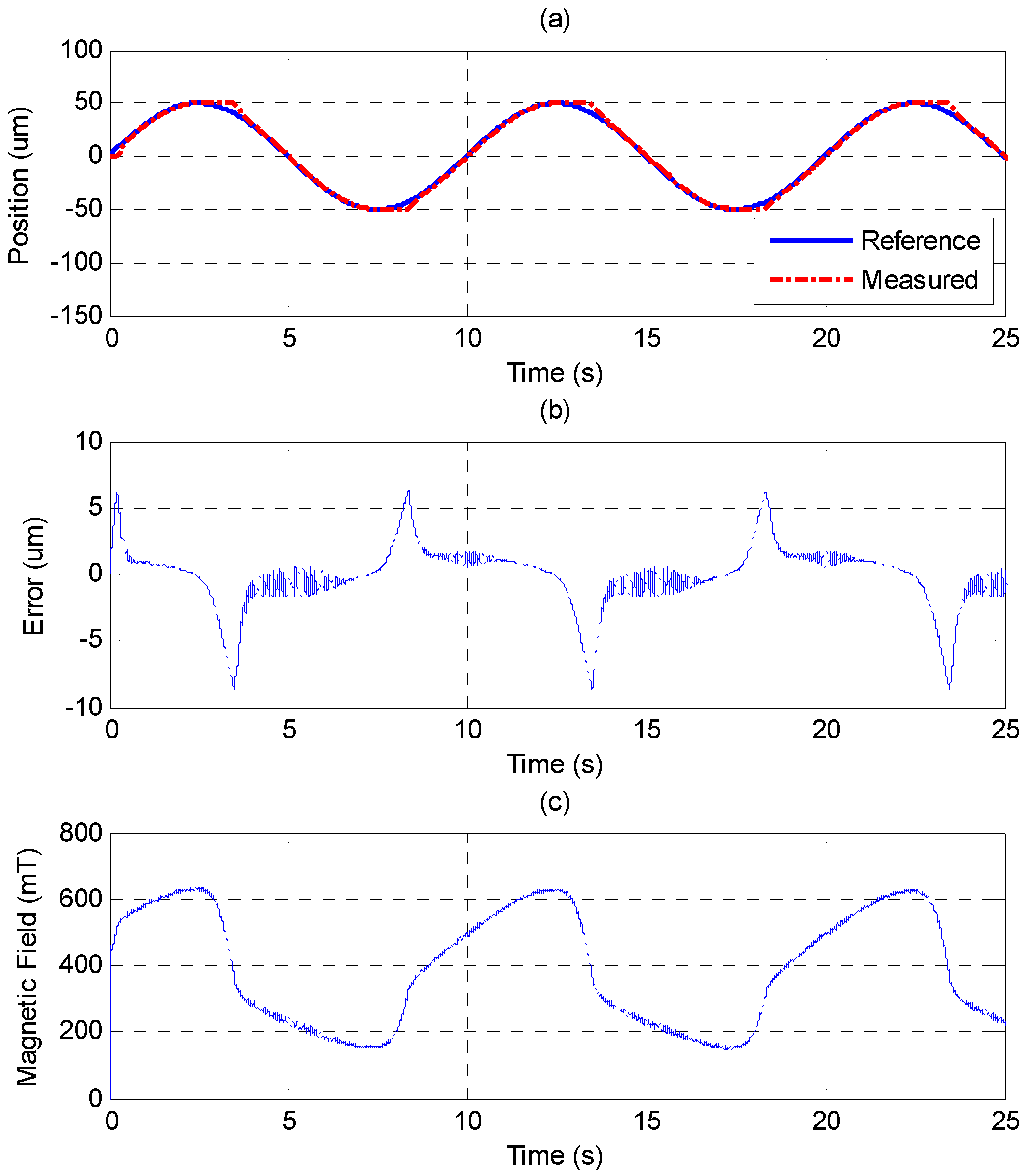
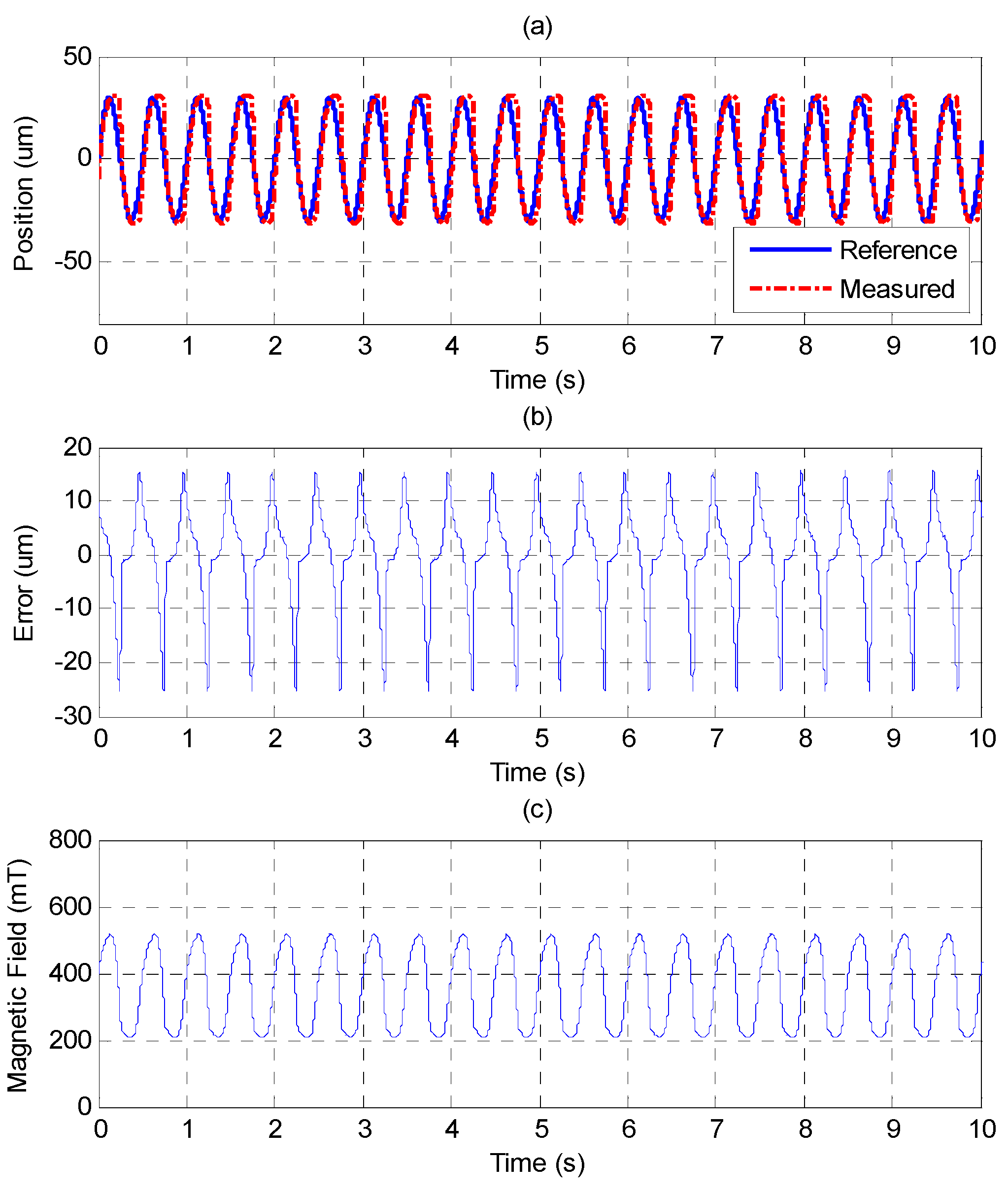
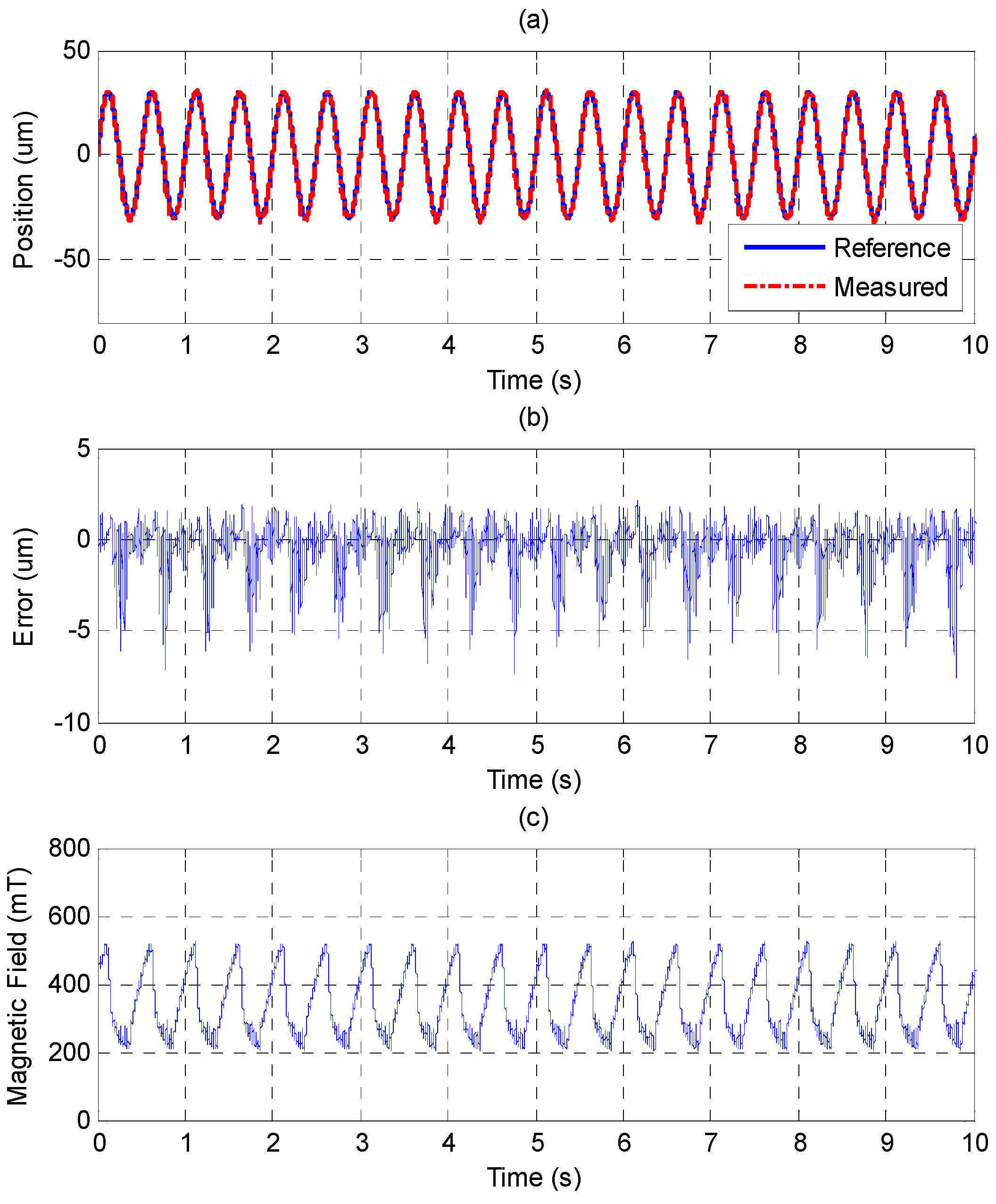
4.3. Sinusoid Trajectory Control

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ullakko, K. Magnetically controlled shape memory alloys: A new class of actuator materials. J. Mater. Eng. Perform. 1996, 5, 405–409. [Google Scholar] [CrossRef]
- Murray, S.J.; Marioni, M.; Allen, S.M.; O’Handley, R.C.; Lograsso, T.A. 6% magnetic-field-induced strain by twin-boundary motion in ferromagnetic Ni–Mn–Ga. Appl. Phys. Lett. 2000, 77, 886–888. [Google Scholar] [CrossRef]
- Murray, S.J.; Marioni, M.; Tello, P.G.; Allen, S.M.; O’Handley, R.C. Giant magnetic-field-induced strain in ni–mn–ga crystals: Experimental results and modeling. J. Magn. Magn. Mater. 2001, 226–230, 945–947. [Google Scholar] [CrossRef]
- Tellinen, J.; Suorsa, I.; Jääskeläinen, A.; Aaltio, I.; Ullakko, K. Basic properties of magnetic shape memory actuators. In Proceedings of the 8th International Conference ACTUATOR 2002, Bremen, Germany, 10–12 June 2002.
- Sozinov, A.; Likhachev, A.A.; Lanska, N.; Ullakko, K. Giant magnetic-field-induced strain in nimnga seven-layered martensitic phase. Appl. Phys. Lett. 2002, 80, 1746–1748. [Google Scholar] [CrossRef]
- Ullakko, K.; Huang, J.K.; Kantner, C.; O’Handley, R.C.; Kokorin, V.V. Large magnetic-field-induced strains in Ni2MnGa single crystals. Appl. Phys. Lett. 1996, 69, 1966–1968. [Google Scholar] [CrossRef]
- Pons, J.; Cesari, E.; Seguí, C.; Masdeu, F.; Santamarta, R. Ferromagnetic shape memory alloys: Alternatives to Ni–Mn–Ga. Mater. Sci. Eng. A 2008, 481–482, 57–65. [Google Scholar] [CrossRef]
- Söderberg, O.; Aaltio, I.; Ge, Y.; Heczko, O.; Hannula, S.P. Ni–Mn–Ga multifunctional compounds. Mater. Sci. Eng. A 2008, 481–482, 80–85. [Google Scholar] [CrossRef]
- Holz, B.; Riccardi, L.; Janocha, H.; Naso, D. Msm actuators: Design rules and control strategies. Adv. Eng. Mater. 2012, 14, 668–681. [Google Scholar] [CrossRef]
- Heczko, O.; Ullakko, K. Effect of temperature on magnetic properties of Ni-Mn-Ga magnetic shape memory (MSM) alloys. IEEE Trans. Magn. 2001, 37, 2672–2674. [Google Scholar] [CrossRef]
- Ullakko, A.A.L.K. Quantitative model of large magnetostrain effect in ferromagnetic shape memory alloys. Eur. Phys. J. B 2000, 14, 263–267. [Google Scholar] [CrossRef]
- Gauthier, J.-Y.; Lexcellent, C.; Hubert, A.; Abadie, J. Modeling rearrangement process of martensite platelets in a magnetic shape memory alloy ni2mnga single crystal under magnetic field and (or) stress action. J. Intell. Mater. Syst. Struct. 2007, 18, 289–299. [Google Scholar] [CrossRef] [Green Version]
- Hirsinger, L.; Lexcellent, C. Modelling detwinning of martensite platelets under magnetic and (or) stress actions on Ni–Mn–Ga alloys. J. Magn. Magn. Mater. 2003, 254–255, 275–277. [Google Scholar] [CrossRef]
- Tan, H.; Elahinia, M.H. Dynamics Modeling of Ferromagnetic Shape Memory Alloys (FSMA) Actuators. Proc. SPIE Smart Struct. Mater. 2006 Smart Struct. Integr. Syst. 2006, 6173. [Google Scholar] [CrossRef]
- Riccardi, L.; Naso, D.; Turchiano, B.; Janocha, H. Adaptive control of positioning systems with hysteresis based on magnetic shape memory alloys. IEEE Trans. Control Syst. Technol. 2013, 21, 2011–2023. [Google Scholar] [CrossRef]
- Riccardi, L.; Naso, D.; Turchiano, B.; Janocha, H. Robust adaptive control of a magnetic shape memory actuator for precise positioning. In Proceedings of the American Control Conference (ACC), San Francisco, CA, USA, 29 June–1 July 2011; pp. 5400–5405.
- Sadeghzadeh, A.; Asua, E.; Feuchtwanger, J.; Etxebarria, V.; García-Arribas, A. Ferromagnetic shape memory alloy actuator enabled for nanometric position control using hysteresis compensation. Sens. Actuators A Phys. 2012, 182, 122–129. [Google Scholar] [CrossRef]
- Sarawate, N.; Dapino, M. Experimental characterization of the sensor effect in ferromagnetic shape memory Ni–Mn–Ga. Appl. Phys. Lett. 2006, 88, 121923. [Google Scholar] [CrossRef]
- Stephan, J.M.; Pagounis, E.; Laufenberg, M.; Paul, O.; Ruther, P. A novel concept for strain sensing based on the ferromagnetic shape memory alloy NiMnGa. IEEE Sens. J. 2011, 11, 2683–2689. [Google Scholar] [CrossRef]
- Chiang, M.-H.; Lin, J.-H. A positioning actuator of magnetic shape memory alloys based on fuzzy sliding mode control. In Proceedings of the 11th IEEE International Conference on Control & Automation (ICCA), Taichung, Taiwan, 18–20 June 2014; pp. 440–444.
- Adaptamat Ltd. Available online: http://www.adaptamat.com/ (accessed on 4 April 2015).
- Kim, S.-W.; Lee, J.-J. Design of a fuzzy controller with fuzzy sliding surface. Fuzzy Sets Syst. 1995, 71, 359–367. [Google Scholar] [CrossRef]
- Wu, J.C.; Liu, T.S. A sliding-mode approach to fuzzy control design. IEEE Trans. Control Syst. Technol. 1996, 4, 141–151. [Google Scholar] [CrossRef]
- Tzafestas, S.G.; Rigatos, G.G. A simple robust sliding-mode fuzzy-logic controller of the diagonal type. J. Intell. Rob. Syst. 1999, 26, 353–388. [Google Scholar] [CrossRef]
- Slotine, J.-J.E. Sliding controller design for non-linear systems. Int. J. Control 1984, 40, 421–434. [Google Scholar] [CrossRef]
- Ziegler, J.G.; Nichols, N.B. Optimum settings for automatic controllers. Trans. ASME 1942, 64, 759–768. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, J.-H.; Chiang, M.-H. Hysteresis Analysis and Positioning Control for a Magnetic Shape Memory Actuator. Sensors 2015, 15, 8054-8071. https://doi.org/10.3390/s150408054
Lin J-H, Chiang M-H. Hysteresis Analysis and Positioning Control for a Magnetic Shape Memory Actuator. Sensors. 2015; 15(4):8054-8071. https://doi.org/10.3390/s150408054
Chicago/Turabian StyleLin, Jhih-Hong, and Mao-Hsiung Chiang. 2015. "Hysteresis Analysis and Positioning Control for a Magnetic Shape Memory Actuator" Sensors 15, no. 4: 8054-8071. https://doi.org/10.3390/s150408054