A Stationary North-Finding Scheme for an Azimuth Rotational IMU Utilizing a Linear State Equality Constraint

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
: The Kalman filter (KF) has always been used to improve north-finding performance under practical conditions. By analyzing the characteristics of the azimuth rotational inertial measurement unit (ARIMU) on a stationary base, a linear state equality constraint for the conventional KF used in the fine north-finding filtering phase is derived. Then, a constrained KF using the state equality constraint is proposed and studied in depth. Estimation behaviors of the concerned navigation errors when implementing the conventional KF scheme and the constrained KF scheme during stationary north-finding are investigated analytically by the stochastic observability approach, which can provide explicit formulations of the navigation errors with influencing variables. Finally, multiple practical experimental tests at a fixed position are done on a postulate system to compare the stationary north-finding performance of the two filtering schemes. In conclusion, this study has successfully extended the utilization of the stochastic observability approach for analytic descriptions of estimation behaviors of the concerned navigation errors, and the constrained KF scheme has demonstrated its superiority over the conventional KF scheme for ARIMU stationary north-finding both theoretically and practically.1. Introduction
The rotational inertial measurement unit (IMU) high precision inertial navigation system (INS) concept has been developed for use in long-term scenarios [1–4]. Due to its advantage in reducing the effect of gyroscope drift, there is growing interest in the navigation community for use of the rotational IMU concept with various gyroscopes applications [1–12]. Nowadays, many techniques are in use, with approaches such as single-axis rotation [1,3,4,6–11], dual-axis rotation [1,5,12], and triple-axis rotation [2] being the approaches of choice.
Generally, the single-axis rotation approach applies the azimuth rotational motion periodically to the IMU. Different schemes can be implemented for single-axis rotation, such as flip/dwell schemes [3,4], continuously rotating schemes [8,11,13], reciprocating rotation schemes [9,10], and so on. In the subsequent sections of this paper, an IMU with the continuously rotating scheme is called the azimuth rotational IMU (ARIMU). As it behaves with some specific characteristics, comprehensive research on the ARIMU is of great significance. From a mathematical point of view, Britting proved that continuous rotation offers an advantage in attenuating the effects of time-correlated random drift change and the operational environment is significantly better for the gyro during rotation [8]. An experimental method based on the fast orthogonal search for a practical observation model to separate angle random walk error from the RLG measured data on a turntable with continuous rotation was proposed in [11]. Theoretical explanations of the principle of restraining navigation errors by continuous rotation based on the navigation error equation were presented in [13].
In many practical applications, the azimuth determination requirements are high accuracy and short time [5–8,14–17]. The Kalman filter (KF) has always been used to provide self-calibration and to improve azimuth performance under practical conditions [2,3,6,8–10]. An observation model that includes north and east velocities and geographic frame east rate measurements was presented and illustrated by simulated IMU date in [16]. To improve self-alignment scheme for a strapdown INS in near stationary conditions, a nonlinear augmented measurement-based observation model was proposed in [18]. A rigorous analytical method of incorporating state equality constraints in the Kalman filter was developed to improve the prediction accuracy of the filter in [19]. These literatures are all very instructive to analysts concerned with azimuth determination problems.
Although a considerable amount of research on determining the azimuth angle has been done for the ARIMU [3–10,13], they did not pay much attention to the estimation behaviors (e.g., convergence rate) of navigation errors when implementing a Kalman filter. Taking advantage of its basic properties of intuitive linear-algebraic characterizations of the stochastic observability, azimuth behaviors during in-flight alignment when several characteristic maneuvers are performed were investigated and explicit findings were obtained analytically with simple models in [14,15].
The major thrusts of this paper are to provide a novel rapid north-finding filtering scheme for the ARIMU on a stationary base using a state equality constraint and to extend the utilization of the stochastic observability approach for analytic descriptions of estimation behaviors of the concerned navigation errors. For illustrative purposes, a postulate system, the principal idea of which is close to that of [9,10], was taken as the experimental set-up.
The remainder of the paper is organized as follows: in Section 2, an error dynamic model for the ARIMU and a conventional observation model for stationary north-finding are presented, followed by formulation of a linear state equality constraint and a proposed constrained KF for stationary north-finding. Section 3 describes the analytical solution for characterizing estimation behaviors of the concerned navigation errors during stationary north-finding based on the stochastic observability approach. Results and discussions of experimental verification are given in Section 4. Conclusions are drawn in Section 5.
2. Error Dynamic Model for the ARIMU and the State Equality Constraint
2.1. Modeling Error Dynamics for the ARIMU
In this subsection, a commonly used navigation error dynamic model is presented. For the reduction of computation load when applying stochastic observability analysis, the error dynamic equations in the ψ formulation will be introduced in this study.
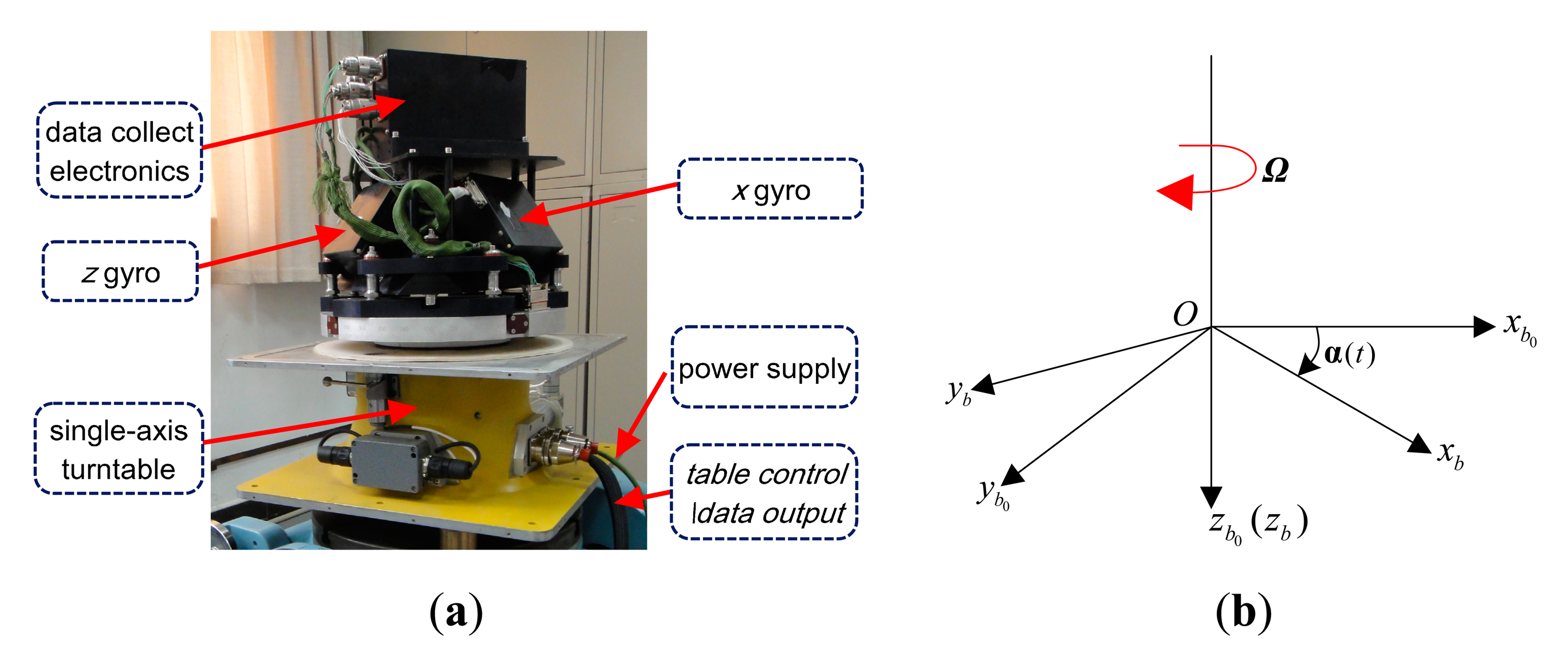
Figure 1 depicts the experimental set-up and a diagrammatic sketch of the coordinate frames in the ARIMU. The IMU contains a three-axis ring laser gyro (RLG) triad, a three-axis vibrating quartz accelerometer triad and their associated electronics. We denote by b the IMU fixed frame, and the zb axis lies along the turntable shaft center and downwards vertically to the turntable plane. As the IMU is rigidly fixed on a continuously rotational turntable, the b frame is rotated with the turntable rotation [11].
For the sake of convenience, we define the b0 frame when the xb axis coincides with the turntable null indicator. Then, we have:
As the b0 frame is turntable fixed, remains constant on stationary base. In practice, the b0 frame is approximately leveled, the roll and pitch angles are small enough, it yields:
Thus, a transformation from the b frame to the n frame may be expressed as the product of Equations (1) and (2), we may write:
Neglecting other error sources such as factor error, temperature effect, and so on, gyro triad biases and accelerometer triad biases are assumed to be constant. Then, basic navigation error equations in ψ form expressed in the north-east-down (NED) coordinate system are as follows [16,20,21]:
The error items including attitude error components of ψ, north velocity error δvN, east velocity error δvE, gyro bias components of εb, accelerometer bias acting about the xb axis , and accelerometer bias acting about the yb axis are taken into account in the state update equations of the implemented Kalman filters. Meanwhile, is equal to 0 when the b0 frame is at rest. Hence, error dynamic model for the ARIMU is given by:
Components of wf add small random walk quantities to δv and ψ. The matrix F takes the following form:
Similarly, we have:
For stationary north-finding, the position has been initialized and the ARIMU uses zero velocity updates, vN and vE are supposed to be zero [20,22]. Therefore, δvN and δvE are chosen as the measured quantities conventionally. The conventional observation model is given by:
Then, optimal estimation of the navigation error states can be achieved based on the augmented error dynamic model (8) and the conventional observation model (11) using a Kalman filter, which we called the conventional KF scheme.
2.2. The State Equality Constraint Formulation and the Proposed constrained KF Equations
By analyzing the characteristics of the ARIMU on a stationary base, we obtain a linear state equality constraint to modify the conventional observation model in this subsection. Theoretically, angular rate measured by the gyro triad under stationary conditions can be expressed in the b frame, that is:
However, as mentioned before, gyroscopes are unfortunately subject to errors such as constant bias, bias stability, temperature effect, and so on. Considering only the gyro constant bias exists as in Equation (6) in the true environment, angular rate measured by the gyro triad under stationary condition, denoted by , is given by:
During stationary north-finding, the estimated direction cosine matrix is used for attitude update computation. Therefore, computed angular rate in the realized computer program can be written as:
Combining Equations (12), (13), and (14), we obtain:
Ignoring small quantity product terms, we then have a state equality constraint equation:
As can be seen in Equation (16), both of ψE and are navigation error states of the error dynamic model (8). Therefore, we can incorporate the linear state equality constraint (16) in the conventional observation model (11). Then, the modified observation model may be expressed as:
Consequently, we propose a constrained KF using the augmented error dynamic model (8) and the modified observation model (17), which is called the constrained KF scheme in the following sections.
3. Stochastic Observability Measures
The stochastic observability approach, which connects the observability analysis with investigation of convergence rates of the concerned navigation errors when implementing a Kalman filter, has demonstrated its effectiveness in successful applications to solving in-flight alignment problems in [14,15]. With the stochastic observability approach, we will provide in this section an analytical solution for characterizing estimation behaviors of the navigation errors during stationary north-finding. Meanwhile, estimation performances of the concerned navigation errors utilizing the conventional KF scheme and the constrained KF scheme are compared. The following analytic and numerical computations are carried out with Wolfram Mathematica 7.0 tool.
3.1. Stochastic Observability
Before entering stochastic observability analysis, some necessary explanations and definitions of observability of linear systems adopted in this study are introduced. For purpose of extending known definitions to stationary north-finding problem, we will adopt the following meanings.
In the absence of process noise and a priori information, the solution to the continuous system matrix Riccati equation in P−1 is given by [14,23]:
Along with the use of the stochastic observability approach, special attention should be paid to the following points:
- (a)
According to the precondition of Equation (18), it should be noted that stochastic observability analyses in the following subsections are performed without considerations of process noise and a priori knowledge of the initial states.
- (b)
The system is uniformly completely observable when the stochastic observability matrix is positive definite and bounded for some t > 0 [23].
As indicated in Equation (18), information (decrease the estimation error variance) about states that are initially completely unknown may be acquired through processing measurements. Besides, with error covariance matrix computations, convergence rates can be analytically investigated to maintain good physical insight into the estimation behaviors of the navigation errors [14,23].
4. Experimental Results of the Postulate System
The first performance evaluation of the rate-biased RLG in the postulate system, which utilizes the concept of the ARIMU, was given in [11]. The system has been developed to meet rapid north-finding challenges. Steps actually required to accomplish a rotation scheme of the postulate system are listed below:
- (a)
It can be seen in Equation (17) that, the measurement noise wzb existing in the added measured quantity is composed of gyro triad measurement random errors and turntable rotation random errors. Therefore, a 2 milliseconds sample time of the IMU measured data and turntable rotation information and an angular resolution of 0.18″ of the turntable photoelectric angle encoder are implemented on the experimental platform, as can be confirmed to restrain the measurement noise wzb to low enough [11].
- (b)
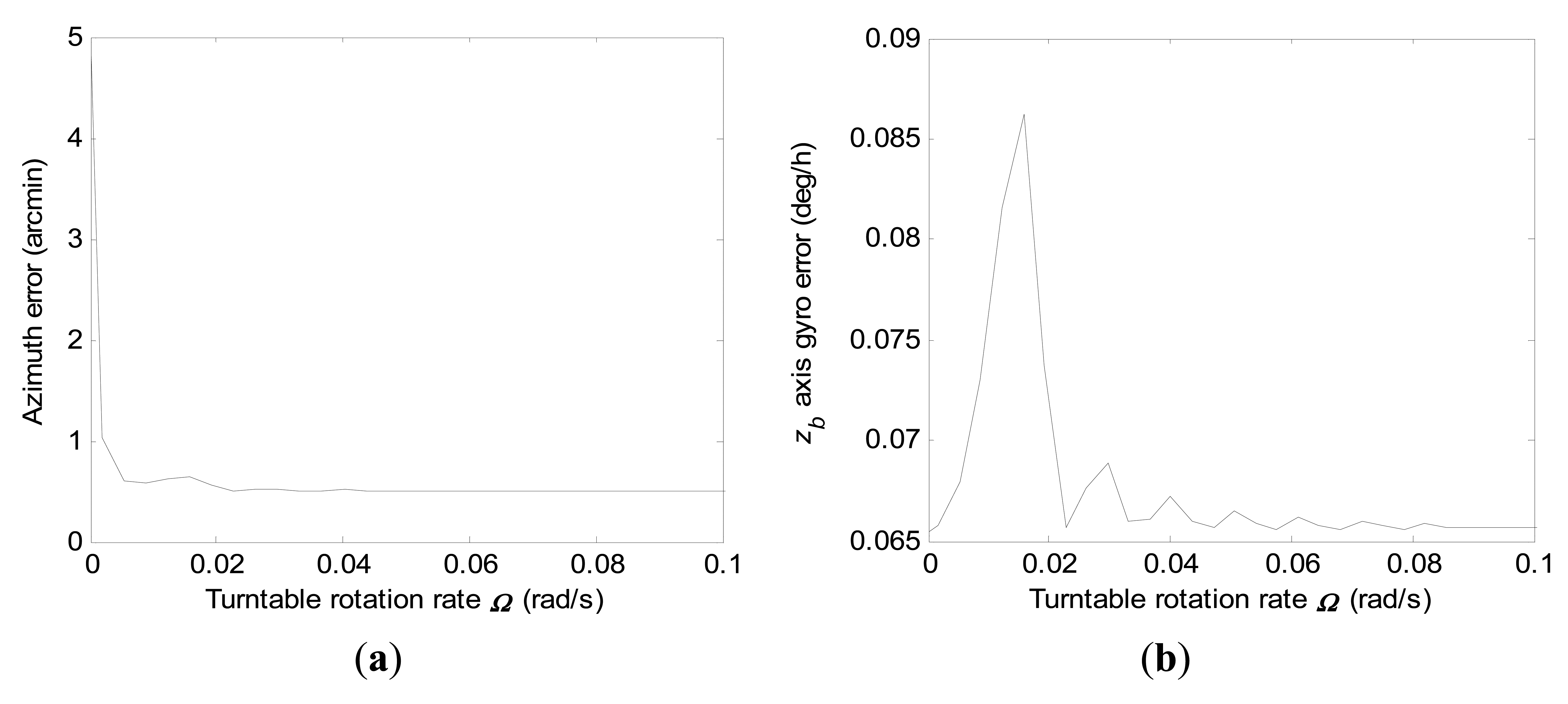
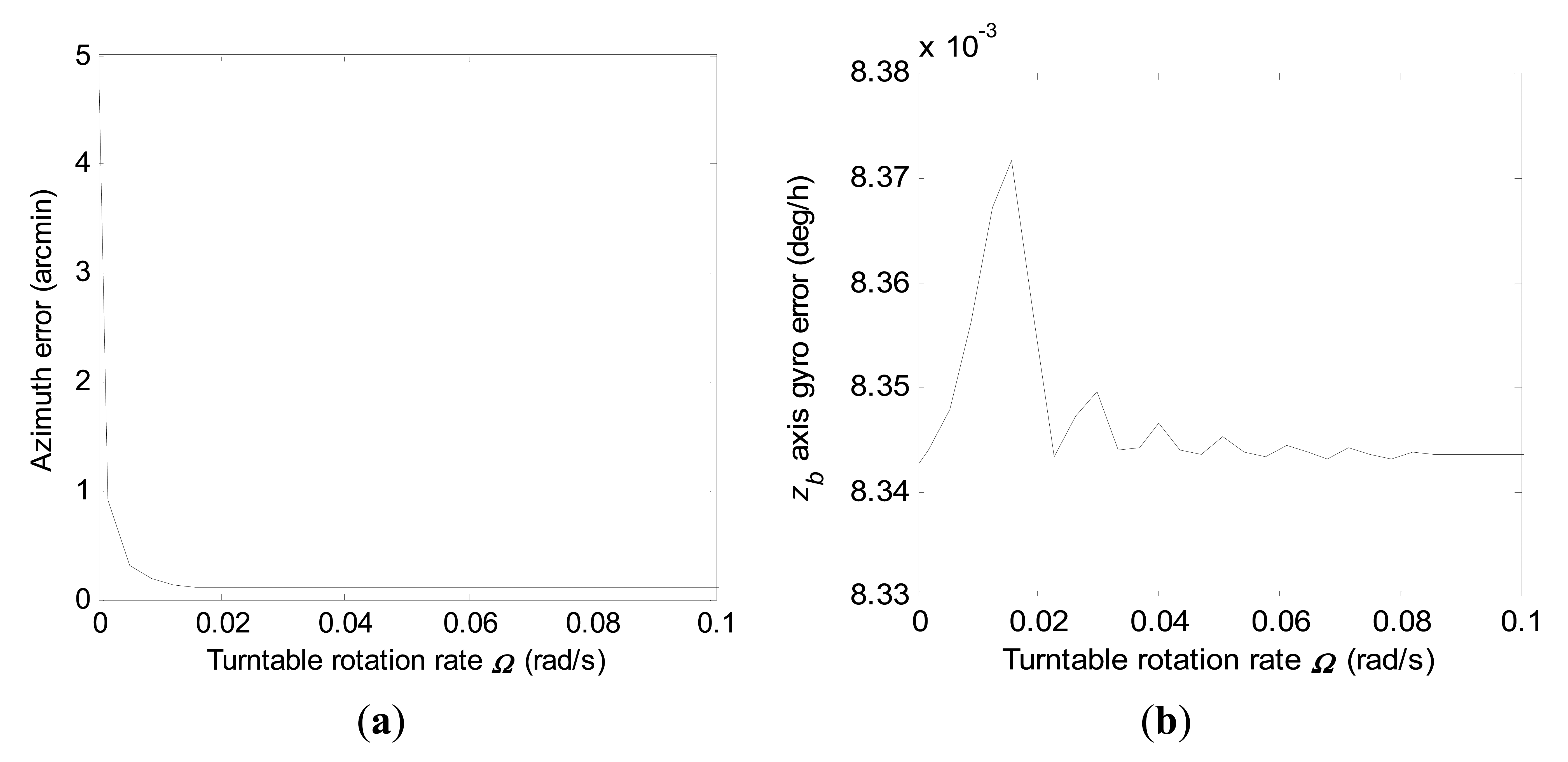
According to the estimation results of the average angle random walk of the constant rate-biased RLG in the postulate system presented in [11], the turntable rotation rate should be larger than 40 deg/s to obviate the effect of lock-in at the low rotation rates. Besides, it helps little to improve stationary azimuth performance when the turntable rotation rate is higher than 0.1 rad/s. Thus, the turntable is determined to be continuously rotating at a rate of 40 deg/s.
4.1. Theoretical Analysis with Practical Considerations
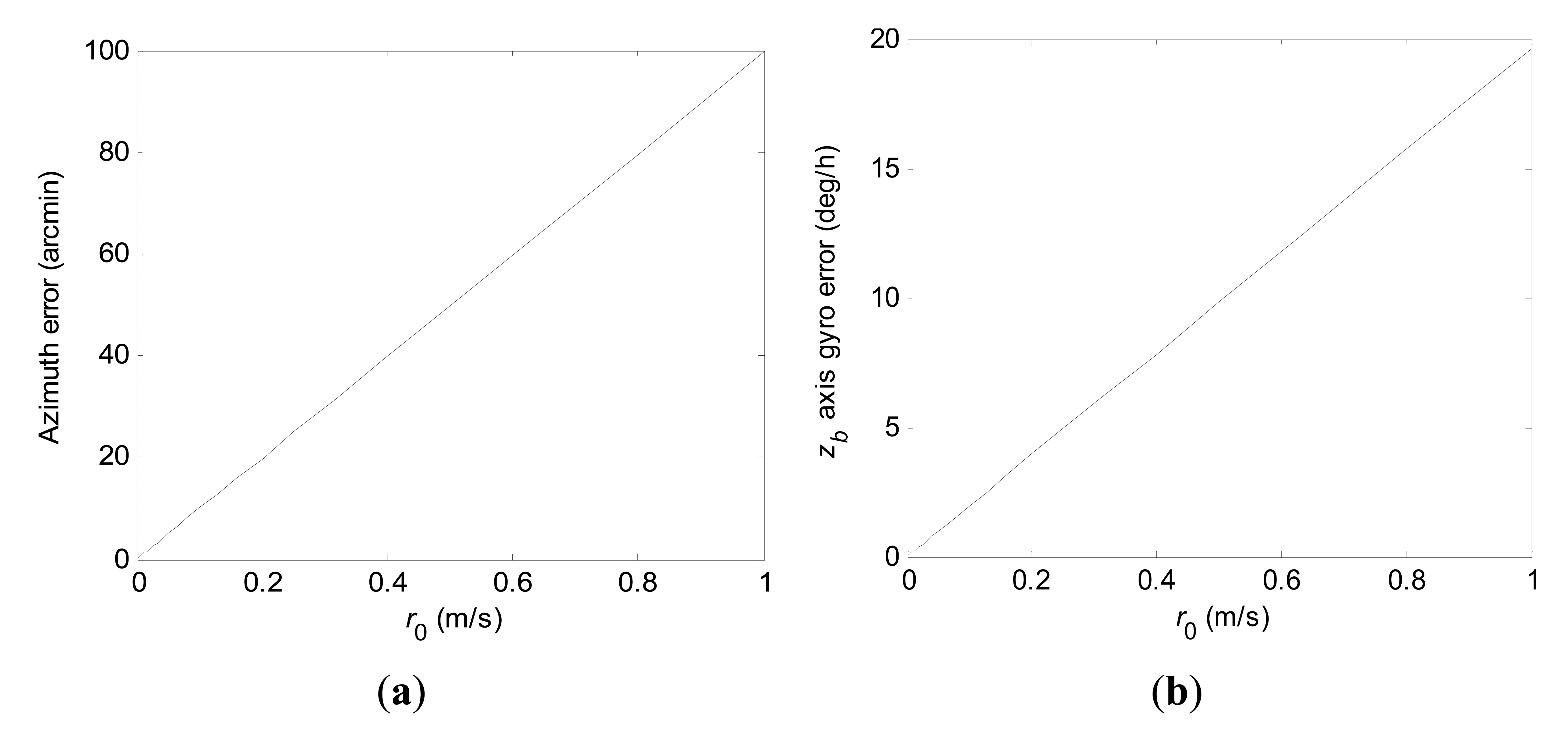
As indicated earlier, stochastic observability analysis of the above two filtering schemes in Section 3 were carried out without consideration of process noise and a priori knowledge of the initial states. In practical applications, there is always a coarse azimuth determination phase before the fine north-finding filtering phase to provide the a priori knowledge of the initial states to match the applicability conditions of Equations (4) and (5). After the coarse azimuth determination phase, the 1-σ value of the azimuth error worked out to be 1.64°; 1-σ values of the roll and pitch angle errors are equal to the same value, which is 0.1°, assuming that both of the 1-σ values of the north and east velocity errors are 1 m/s. In the laboratory environment, the measurement noise standard deviation r0 is 0.01 m/s, and rg is 0.002 deg/h. The a priori knowledge of the initial states is given by
With consideration of the a priori knowledge of the initial states, the solution to the continuous system matrix Riccati equation in P−1 can be written as [15]:
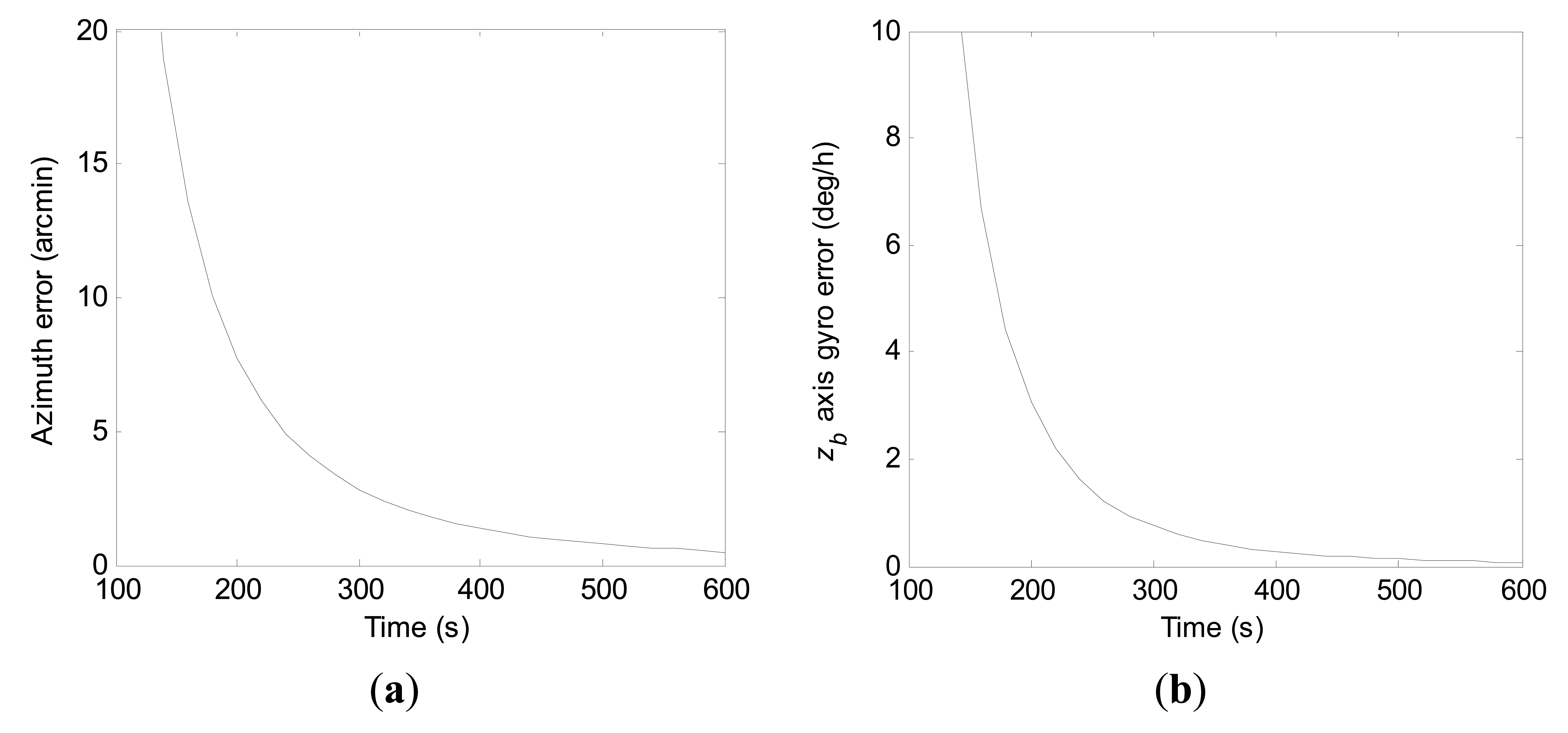
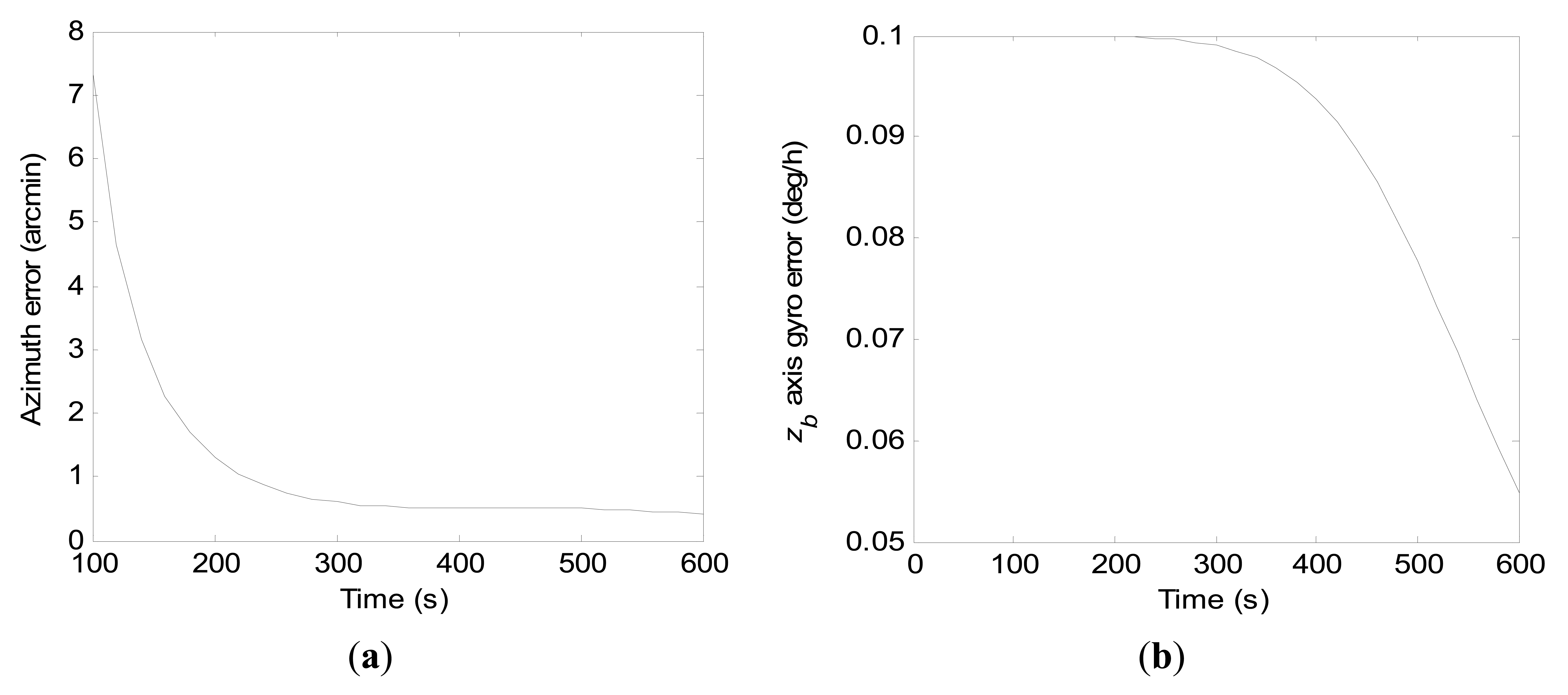
Therefore, convergence rates of the azimuth error and the zb axis gyro error in the true environment can be obtained by error covariance computations with Equation (27) in a similar manner as in Section 3. With the a priori knowledge of the initial states, convergence curves of the azimuth error and the zb axis gyro error within 600 s for the conventional KF scheme and the constrained KF scheme in the practical application are shown in Figures 10 and 11, respectively.
Compared to Figure 8, it is obvious in Figure 10 that the zb axis gyro error actually converges slowly at the beginning until the azimuth error has achieved a certain estimation accuracy in the practical application. From Figure 11, it is seen again that the zb axis gyro error converges much faster with the constrained KF scheme than by the conventional KF scheme. However, combining Figures 10 and 11, one can see that estimation of the azimuth error by the constrained KF scheme does not show better performance than by the conventional KF scheme at the beginning in practical applications. Compared to the estimation accuracy achieved by the conventional KF scheme, the better estimation of the azimuth error at the end of the filtering process by the constrained KF scheme has benefited from the better estimation of the zb axis gyro error. Looking through Figures 8, 9, 10, and 11, it can be seen that, to a certain extent, influences of P(0) on the azimuth error and the zb axis gyro error will converge to zero with filtering carrying on.
4.2. Experimental Results
Then, multiple practical experimental tests can be done on this postulate system at a fixed position to compare the stationary north-finding performance possible with the above two filtering schemes.
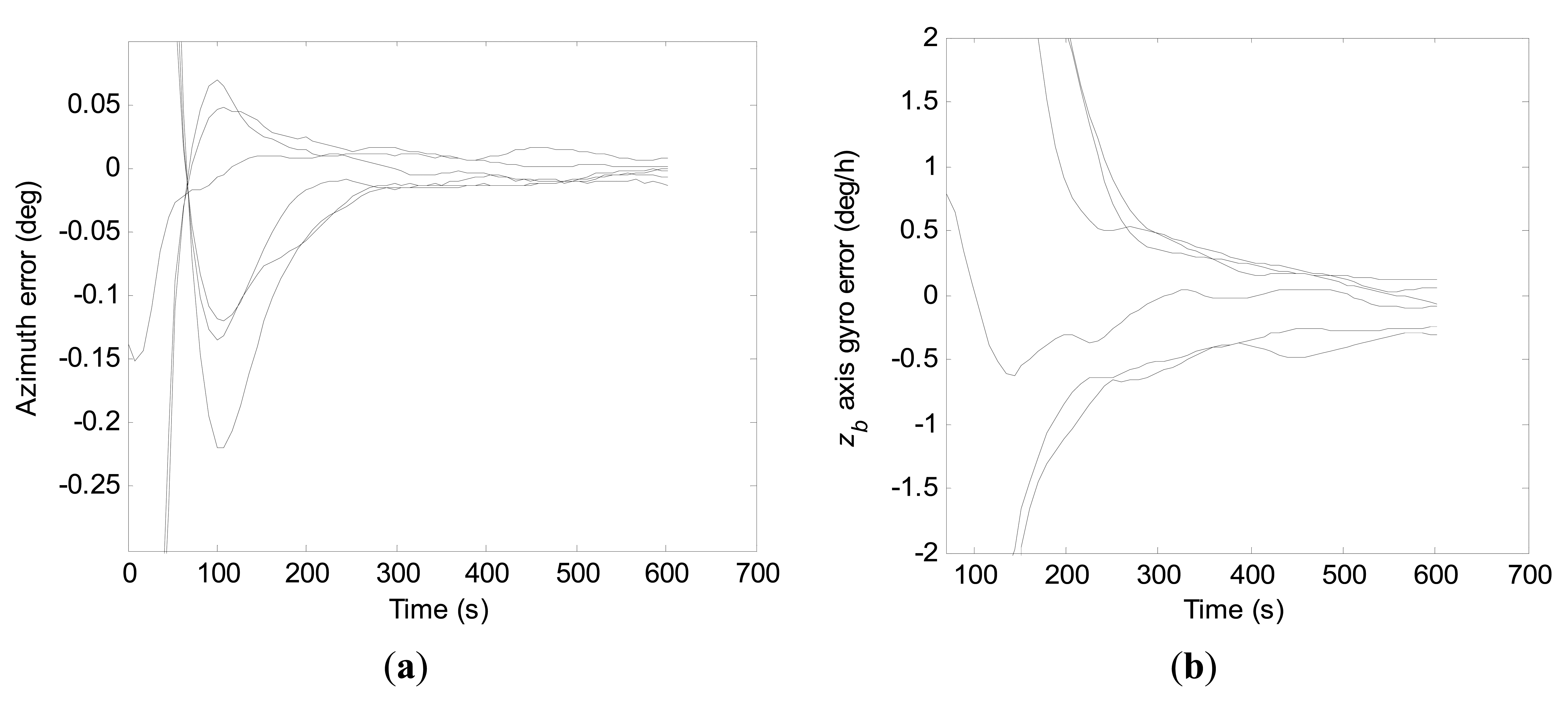
Convergence curves of the azimuth error and the zb axis gyro error within 600 s north-finding time by the conventional KF scheme are shown in Figure 12, respectively. For purpose of clarity, vertical scale units of the figures are adjusted. Due to the severe fluctuation at the beginning, diagrammatic curves of the zb axis gyro error are given from 100 s. From the statistical evaluation, the 1-σ values of final azimuth error and final zb axis gyro error at 600 s are 22.8 arc-seconds and 0.18 deg/h, respectively.
Convergence curves of the azimuth error and the zb axis gyro error within 600 s north-finding time obtained with the constrained KF scheme are shown in Figure 13, respectively.
Apparently, as the added measurement quantity has improved the degree of observability of the zb axis gyro bias, the azimuth error and the zb axis gyro error have converged to steady value much faster by the constrained KF scheme than by the conventional KF scheme. Additionally, the 1-σ values of final azimuth error and final zb axis gyro error at 600 s are 4.4 arc-seconds and 0.0014 deg/h from the statistical calculation, respectively.
From Figures 12 and 13, it can be seen that the constrained KF scheme behaves better in north-finding performance than the conventional KF scheme. However, compared to results of the stochastic observability analysis with the a priori knowledge of the initial states, there is still potential to improve the estimation accuracy of zb axis gyro bias.
5. Conclusions
To improve the north-finding performance of the ARIMU on a stationary base, a constrained KF using a state equality constraint has been studied in depth. By analyzing the characteristics of the ARIMU on a stationary base, we obtained a linear state equality constraint to modify the conventional observation model. Taking advantage of its basic properties of intuitive linear-algebraic characterizations of the stochastic observability, analytical representations of estimation behaviors of the concerned navigation errors when implementing the conventional KF scheme and the constrained KF scheme during stationary north-finding were derived. Evidently, explicit formulations of navigation errors with influencing variables have helped us to maintain good physical insights into the estimation behaviors of the concerned navigation errors during stationary north-finding when implementing the schemes, which is one of the most significant advantages of the stochastic observability approach.
Multiple practical experimental tests at a fixed position were done on a postulate system to compare the stationary north-finding performance by the two filtering schemes. The experimental results show that the azimuth error and the zb axis gyro error have converged to a steady value much faster by the constrained KF scheme than by the conventional KF scheme. From our theoretical investigation and practical experimental verification of the ARIMU with ring laser gyros, the constrained KF scheme has on the whole demonstrated its superiority over the conventional KF scheme for the purposes of ARIMU stationary north-finding.
Acknowledgments
This work was supported by Research Fund for the Doctoral Program of Higher Education of China (Grant No. 2012.4307.110006) and the National High-tech R&D Program of China (Grant No. 2014AA8094028E).
Author Contributions
Huapeng Yu proposed the initial idea; Wenqi Wu, Meng Yu and Hai Zhu conceived and supported the experiments. Huapeng Yu and Meng Yu analyzed the results and wrote this paper. Meng Yu and Dayuan Gao helped to improve the English writing and perform the simulation experiments with the Mathematica tool. Huapeng Yu revised the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Barbour, N. Inertial components—past, present, and future. Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Montreal, QC, Canada, 2–5 August 2001; pp. 1–11.
- Morrow, R.B.; Heckman, D.W. High precision IFOG insertion into the strategic submarine navigation system. Proceedings of the IEEE Position Location and Navigation Symposium, Palm Springs, CA, USA, 23–23 April 1998; pp. 332–338.
- Tucker, T.; Levinson, E. The AN/WSN-7B marine gyrocompass/navigator. Proceedings of the ION National Technical Meeting 2000, Anaheim, CA, USA, 20–22 September 2000; pp. 348–357.
- Ishibashi, S.; Tsukioka, S.; Sawa, T.; Yoshida, H.; Hyakudome, T.; Tahara, J.; Aoki, T.; Ishikawa, A. The rotation control system to improve the accuracy of an inertial navigation system installed in an autonomous underwater vehicle. Proceedings of the Workshop on Scientific Use of Submarine Cables and Related Technologies 2007 (SSC07), Tokyo, Japan, 17–20 April 2007; pp. 495–498.
- Renkoski, B.M. The Effect of Carouseling on MEMS IMU Performance for Gyrocompassing Applications. Master's Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2008. [Google Scholar]
- Sun, W.; Wang, D.; Xu, L.; Xu, L. MEMS-based rotary strapdown inertial navigation system. Measurement 2013, 46, 2585–2596. [Google Scholar]
- Prikhodko, I.P.; Trusov, A.A.; Shkel, A.M. North-finding with 0.004 radian precision using a silicon MEMS quadruple mass gyroscope with Q-factor of 1 million. Proceedings of the MEMS 2012, Paris, France, 29 January–2 February 2012; pp. 164–167.
- Britting, K.R. Effects of azimuth rotation on gyrocompass systems. Proceedings of the 34th Annual Meeting of The Institute of Navigation, Arlington, TX, USA, 26–29 June 1978; pp. 1–13.
- Remuzzi, C.C. Ring laser gyro marine INS. Proceedings of the Institute of Navigation Annual Meeting, Dayton, OH, USA, 23–25 June 1987; pp. 44–50.
- Kuryatov, V.N.; Cheremisenov, G.V.; Panasenko, V.N.; Emelyantsev, G.I.; Nesenyuk, L.P. Marine INS based on the laser gyroscope KM-11. Proceedings of the Symposium on Gyro Technology, Stuttgart, Germany, 17–18 September 2002; pp. 19.0–19.7.
- Yu, H.; Wu, W.; Wu, M.; Feng, G.; Hao, M. Systematic angle random walk estimation of the constant rate biased ring laser gyro. Sensors 2013, 13, 2750–2762. [Google Scholar]
- Yuan, B.; Liao, D.; Han, S. Error compensation of an optical gyro INS by multi-axis rotation. Meas. Sci. Technol. 2012, 23, 025102.1–025102.9. [Google Scholar]
- Nie, Q.; Gao, X.; Liu, Z. Research on accuracy improvement of INS with continuous rotation. Proceedings of the 2009 IEEE International Conference on Information and Automation, Zhuhai/Macau, China, 22–25 June 2009; pp. 870–874.
- Bar-Itzhack, I.Y.; Porat, B. Azimuth observability enhancement during inertial navigation system in-flight alignment. J. Guidance Control 1980, 3, 337–344. [Google Scholar]
- Porat, B.; Bar-Itzhack, I.Y. Effect of acceleration switching during INS in-flight alignment. J. Guidance Control 1981, 4, 385–389. [Google Scholar]
- Rogers, R.M. Applied Mathematics in Integrated Navigation Systems; AIAA, Inc.: Reston, VA, USA, 2012. [Google Scholar]
- Zhang, C.; Tian, W.; Jin, Z. A novel method improving the alignment accuracy of a strapdown inertial navigation system on a stationary base. Meas. Sci. Technol. 2004, 15, 765–769. [Google Scholar]
- Acharya, A.; Sadhu, S.; Ghoshal, T.K. Improved self-alignment scheme for SINS using augmented measurement. Aerosp Sci. Technol. 2011, 15, 125–128. [Google Scholar]
- Simon, D.; Chia, T.L. Kalman filtering with state equality constraints. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 128–136. [Google Scholar]
- Lee, J.G.; Park, C.G.; Park, H.W. Multiposition alignment of strapdown inertial navigation system. IEEE Trans. Aerosp. Electron. Syst. 1993, 29, 1323–1328. [Google Scholar]
- Chung, D.; Park, C.G.; Lee, J.G. Observability Analysis of strapdown inertial navigation system using Lyapunov transformation. Proceedings of the 35th Conference on Decision and Control, Kobe, Japan, 11–13 December 1996; pp. 23–28.
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; ARTECH House: Boston, MA, USA; London, UK, 2008. [Google Scholar]
- Gelb, A. Applied Optimal Estimation; MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Wang, D.; Zhang, H.; Zhang, Y.; Zhong, Y.; Song, J.; Shi, W. Azimuth modulation rotating speed optimization of platform inertial navigation system. J. Chin. Inert. Technol. 2013, 3, 312–317. (In Chinese). [Google Scholar]



© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Zhu, H.; Gao, D.; Yu, M.; Wu, W. A Stationary North-Finding Scheme for an Azimuth Rotational IMU Utilizing a Linear State Equality Constraint. Sensors 2015, 15, 4368-4387. https://doi.org/10.3390/s150204368
Yu H, Zhu H, Gao D, Yu M, Wu W. A Stationary North-Finding Scheme for an Azimuth Rotational IMU Utilizing a Linear State Equality Constraint. Sensors. 2015; 15(2):4368-4387. https://doi.org/10.3390/s150204368
Chicago/Turabian StyleYu, Huapeng, Hai Zhu, Dayuan Gao, Meng Yu, and Wenqi Wu. 2015. "A Stationary North-Finding Scheme for an Azimuth Rotational IMU Utilizing a Linear State Equality Constraint" Sensors 15, no. 2: 4368-4387. https://doi.org/10.3390/s150204368