A Strapdown Interial Navigation System/Beidou/Doppler Velocity Log Integrated Navigation Algorithm Based on a Cubature Kalman Filter


Abstract
: The integrated navigation system with strapdown inertial navigation system (SINS), Beidou (BD) receiver and Doppler velocity log (DVL) can be used in marine applications owing to the fact that the redundant and complementary information from different sensors can markedly improve the system accuracy. However, the existence of multisensor asynchrony will introduce errors into the system. In order to deal with the problem, conventionally the sampling interval is subdivided, which increases the computational complexity. In this paper, an innovative integrated navigation algorithm based on a Cubature Kalman filter (CKF) is proposed correspondingly. A nonlinear system model and observation model for the SINS/BD/DVL integrated system are established to more accurately describe the system. By taking multi-sensor asynchronization into account, a new sampling principle is proposed to make the best use of each sensor's information. Further, CKF is introduced in this new algorithm to enable the improvement of the filtering accuracy. The performance of this new algorithm has been examined through numerical simulations. The results have shown that the positional error can be effectively reduced with the new integrated navigation algorithm. Compared with the traditional algorithm based on EKF, the accuracy of the SINS/BD/DVL integrated navigation system is improved, making the proposed nonlinear integrated navigation algorithm feasible and efficient.1. Introduction
In modern marine navigation, the strapdown inertial navigation systems (SINS) is widely used due to its advantages of being more compact and autonomous. However, accumulated navigation errors are inevitable in SINS and may become considerably conspicuous in the long-term. Consequently, it is often aided with other sensors, e.g., global positioning system (GPS) and Doppler velocity log (DVL) etc. The accuracy of the integrated system can thus be effectively improved owing to the redundancy and complementarity of the measurements [1–3]. Nowadays, the GPS-aided SINS integrated system is the most popular marine navigation system. Besides GPS, GLONASS, Gallileo, and another satellite navigation system named Beidou (BD) is being developed, which can provide precise position information via the double-star positioning theory [4,5]. This study focuses on the SINS/BD integrated system and further integrates DVL into the SINS/BD system to maintain and improve the system accuracy in poor BD or BD denied environments [5,6].
One outstanding feature of BD is that it is an active inquiry-response positioning system. The user's position information is sent to the ground central control system through two satellites and then processed by the ground central control system. Then, the processed information is sent back to the satellites, and finally the estimated user's position is sent to the user by the satellites [7,8]. Accordingly, the signals are transmitted multiple times between the ground receiver and satellites. With the additional processing time of the calculation center, time-delays appear in the user's position. This causes the asynchronous phenomenon in a SINS/BD/DVL integrated navigation system, which will degrade the accuracy of the system. Therefore, an advanced asynchronous algorithm with small computational cost and high accuracy is important for SINS/BD/DVL integrated navigation.
To solve the multi-sensor asynchronous problem, a SINS/Beidou/STAR integrated navigation system based on the federal filtering algorithm was built up [9]. Prior delayed information was recorded to correct the estimated states and their covariance matrix. In [10] an algorithm of weighted covariance for centralized asynchronous fusion (WCCAF), which fused the latest predicted state vector with the existing estimated state vector was proposed. The simulation results showed that the maximal position RMSE was 6 m in 90 s with the proposed method. Although these two methods could dampen the estimation error due to the asynchronization among multiple sensors, both of them are based on Kalman filters, so they are only suitable for linear systems. Since almost all actual systems are nonlinear, nonlinear filters should be used for multi-sensor information fusion [11–18]. In [11] an information fusion algorithm based on the Extend Kalman Filter (EKF) was introduced to solve nonlinear problems in multi-sensor integrated navigation, but the precision is limited because of the Taylor expansion and the EKF needs to calculate the fussy Jacobian matrix which increases the computational load. With the presented algorithm, 80% of errors in estimation are within 16 m in 50 s. The authors of [18] proposed an integrated navigation algorithm based on Unscented Kalman Filter (UKF) which was applied to a SINS/CNS (Celestial Navigation System)/GPS integrated system. In [18], the local UKF was used to estimate the nonlinear integrated system and the federated Kalman filter was used to fuse the predictions of local filters, but in high-dimensional systems, the computation load is still heavy, thus, the filter converges slowly. In 2009, Arasaratnam and Haykin [19] proposed a more accurate nonlinear filtering solution based on a Cubature transform named Cubature Kalman filter (CKF) which can avoid linearization of the nonlinear system by using Cubature point sets to approximate the mean and variance. The third-order accuracy of the system can be achieved with this method. Because of its high accuracy and low calculation load, the CKF is widely used in attitude estimation and navigation [20–22].
In this paper a novel asynchronous algorithm for the SINS/BD/DVL integrated navigation system is proposed on the basis of CKF. Meantime, new nonlinear system and measurement models are also established for the measurements from SINS, BD and DVL. Taking multi-sensor asynchronization into account, a new sampling principle is proposed to make the best use of individual measurements. Even better, CKF can not only reduce the computational complexity, but also improve the accuracy of the navigation solution. The results from simulations showed that the proposed algorithm is superior to the conventional one. The rest of the paper is organized as follows. The description of the error differential equations of the SINS/BD/DVL integrated navigation system and the nonlinear filter named CKF are presented in Section 2. Section 3 shows the new sampling principle and the new asynchronous integrated navigation algorithm. Numerical examples along with specfic analysis are given in Section 4. Section 5 concludes this manuscript.
2. Sensor Error Models and Nonlinear CKF
2.1. Nonlinear Error Model of SINS
Traditional linear differential equations are obtained under the assumption that the misalignment angles are small, so modeling errors are inevitable due to the nonlinearity of the true error model [3]. To improve the accuracy of the system model, a nonlinear error model of large azimuth misalignment angle for SINS is considered in this paper.
In this paper, i, b, e, n and n′ denote the inertial coordinate system, the body coordinate system, the earth coordinate system, the navigation coordinate system, and the calculation coordinate system of SINS, respectively. Suppose that n can be transformed to n′ by turning, ϕz, ϕx and ϕy successively, wherein ϕ = [ϕx ϕy ϕz]T is the Euler error angle vector, the direction cosine matrix from n to n′ is . Using sϕi, cϕi (i = x, y, z) denote sin(ϕi) and cos(ϕi), respectively, can be describled as follows:
The nonlinear attitude error equation of SINS can be derived as follows:
The SINS velocity error equation is given by:
Suppose that δ fb is composed of the constant bias error ∇b and the zero-mean Gaussian white noise vector . If δ gn is ignored, Equation (4) can be rewritten as follows:
Because both of the gyro and accelerometer errors are composed of a constant error vector and a zero-mean Gaussian white noise vector, their differential equations are:
The position error equations comprise the longitude error δλ and the latitude error δφ:
2.2. Error Model of BD
The location information can be received directly from BD. The major error sources which affect the measurement accuracy of BD are the error of the BD receiver, the track error and the multi-path effect. To focus on the asynchronicity problem of multi-sensor systems, only the clock error of a BD receiver is taken into account here, including the clock bias and the clock frequency drift [6]. Despite the fact that the clock bias consists of constant and random components, only the constant bias is taken into account here for simplification. Normally, one uses Δt and δt to denote the clock constant bias and the clock frequency drift. So the shaping filter of the BD receiver's clock error is described as follows:
2.3. Error Model of DVL
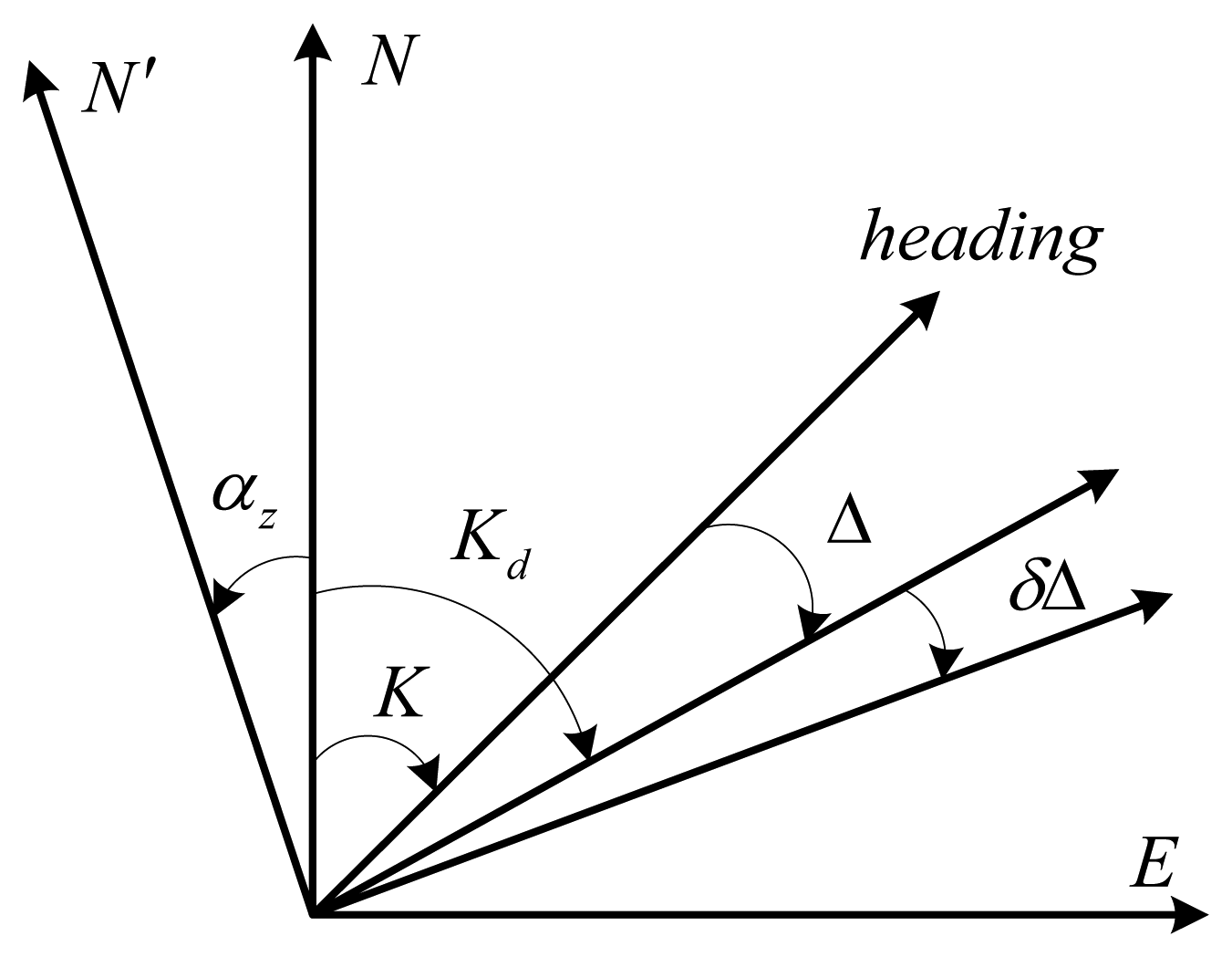
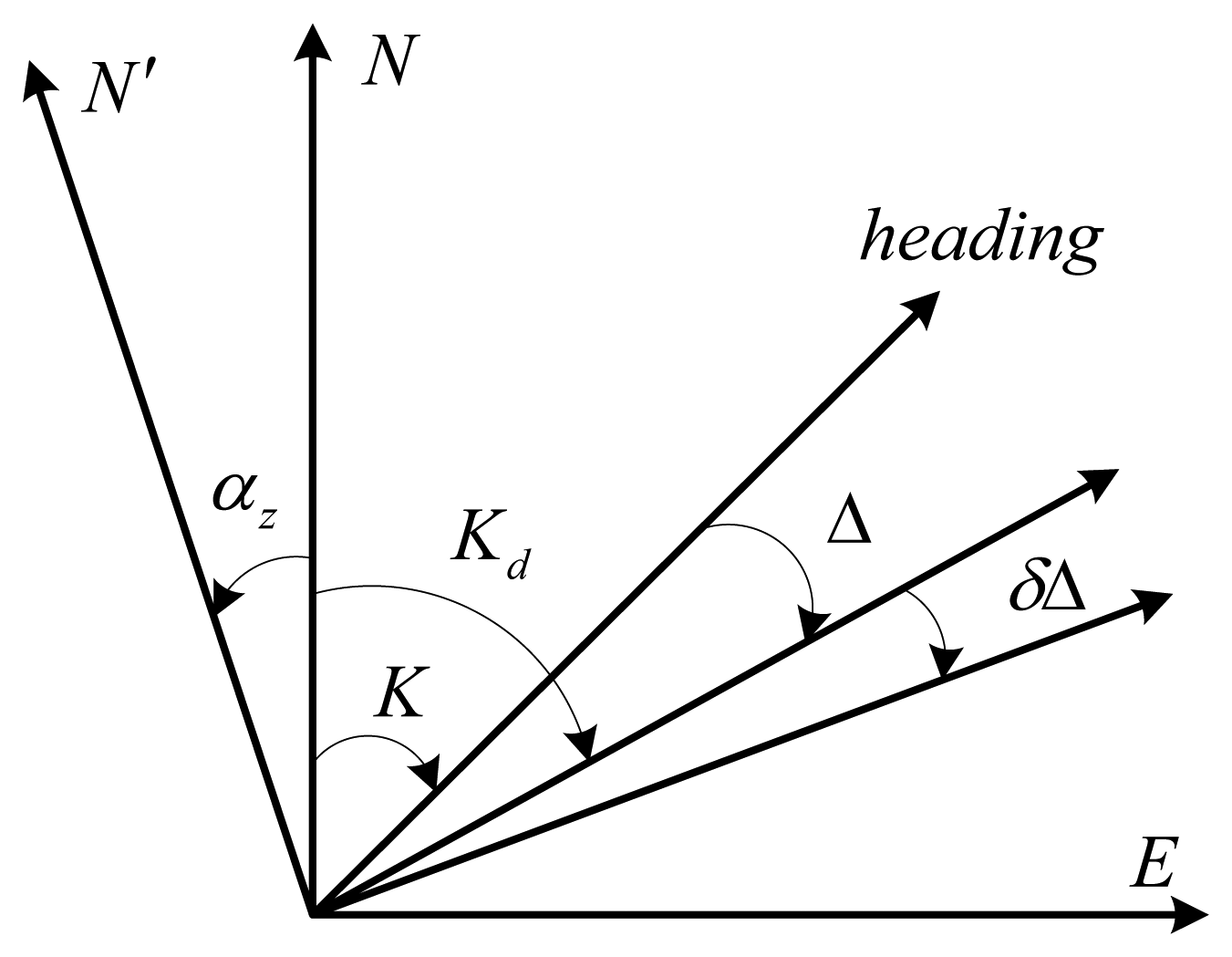
The DVL functions as a sensor that measures the frequency shift of an acoustic signal, either transmitted or received by a moving object, which is proportional to the velocity of the moving object [2,23]. It can not only provide high accuracy absolute velocity, but aslo have satisfactory anti-interference performance, hence, DVL is widely deployed in marine navigation systems. The working principle of a DVL is based on the Doppler effect and the principle is described in Figure 1.
In Figure 1, K means the true heading, Kd is the heading with the drift angle Δ, the drift of the angle error is denoted by δΔ, and αz indicates the azimuth misalignment angle. By using to denotes the velocity vector measured by the DVL, the following velocity equations are satisfied:
From Figure 1, one can also obtain:
According to the working principle of the DVL, one can obtain the velocity and the drift angle relative to the seafloor. Thus, the measurement errors include the velocity drift error δVd, the scale factor error δC and the drift angle error δΔ [2,4]. The DVL error model is as follows:
2.4. Cubature Kalman Filter
Consider the following discrete-time nonlinear state-space model:
CKF is proposed to solve this nonlinear filtering problem on the basis of the spherical-radial cubature criterion. CKF first approximates the mean and variance of probability distribution through a set of 2N (N is the dimension of the nonlinear system) Cubature points with the same weight, propagates the above cubature points through the nonlinear functions, and then calculates the mean and variance of the current approximate Gaussian distribution by the propagated cubature points [19].
A set of 2N Cubature points are given by [ξi, ωi], where ξi is the i-th cubature point and ωi is the corresponding weight:
Under the assumption that the posterior density at time k−1 is known, the steps involved in the time-update and the measurement-update of CKF are summarized as follows [19]:
Time-update:
Measurement-update:
With the new measurement vector zk, the estimated of the state vector x̂k∣k and its covariance matrix Pk∣k at time k can be obtained by the following equations:
CKF uses cubature rule and 2N cubature point sets [ξi, ωi] to compute the mean and variance of probability distribution without any linearization of a nonlinear model. Thus, the modeling can reach the third-order or higher. Furthermore, this filtering solution does not demand Jacobians and Hessians so that the computational complexity will be alleviated to a certain extent.
3. Novel Nonlinear Integration Algorithm for Nonlinear SINS/BD/DVL Based on CKF
3.1. Nonlinear Model of SINS/BD/DVL
The nonlinear model for a SINS/BD/DVL integrated navigation system is established under the large azimuth misalignment angle in this paper. Considering the following error states: the longitude error δλ, the latitude error δφ, the east velocity error δνx, the north velocity error δνy, the Euler angle errors ϕx, ϕy and ϕz, the accelerometer zero-biases ∇x, ∇y, the constant gyro drifts εx, εy, εz; the clock constant bias Δt and the clock frequency drift δt of the BD clock error, the velocity drift error δVd, the scale factor error δC and the drift angle error δΔ of DVL, the state vector is built up as follows:
The corresponding state equation is written as:
The state function f(·) can be obtained from Equations (1)–(13) and [3]. Futher, the process noise vector is given by:
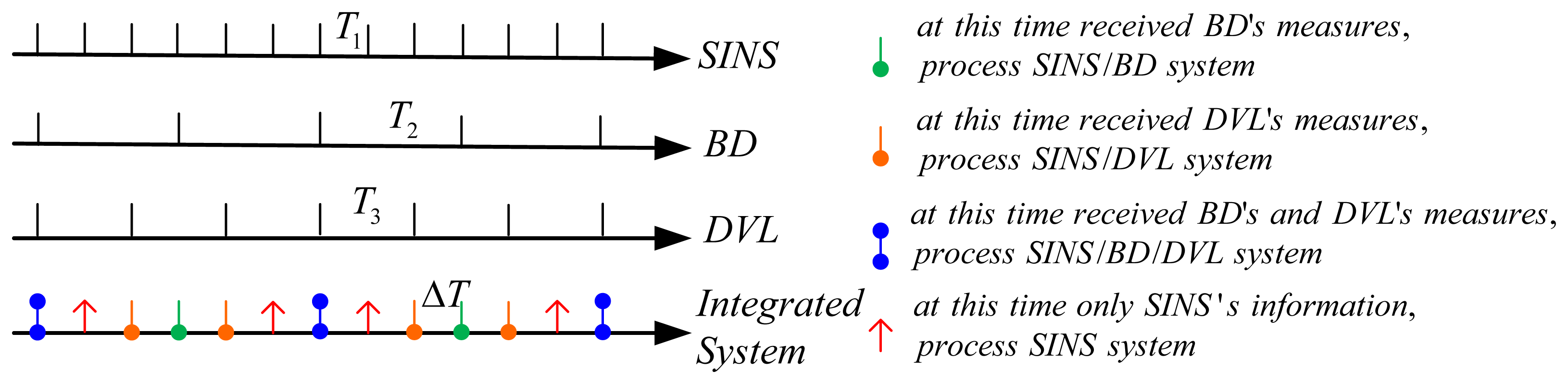
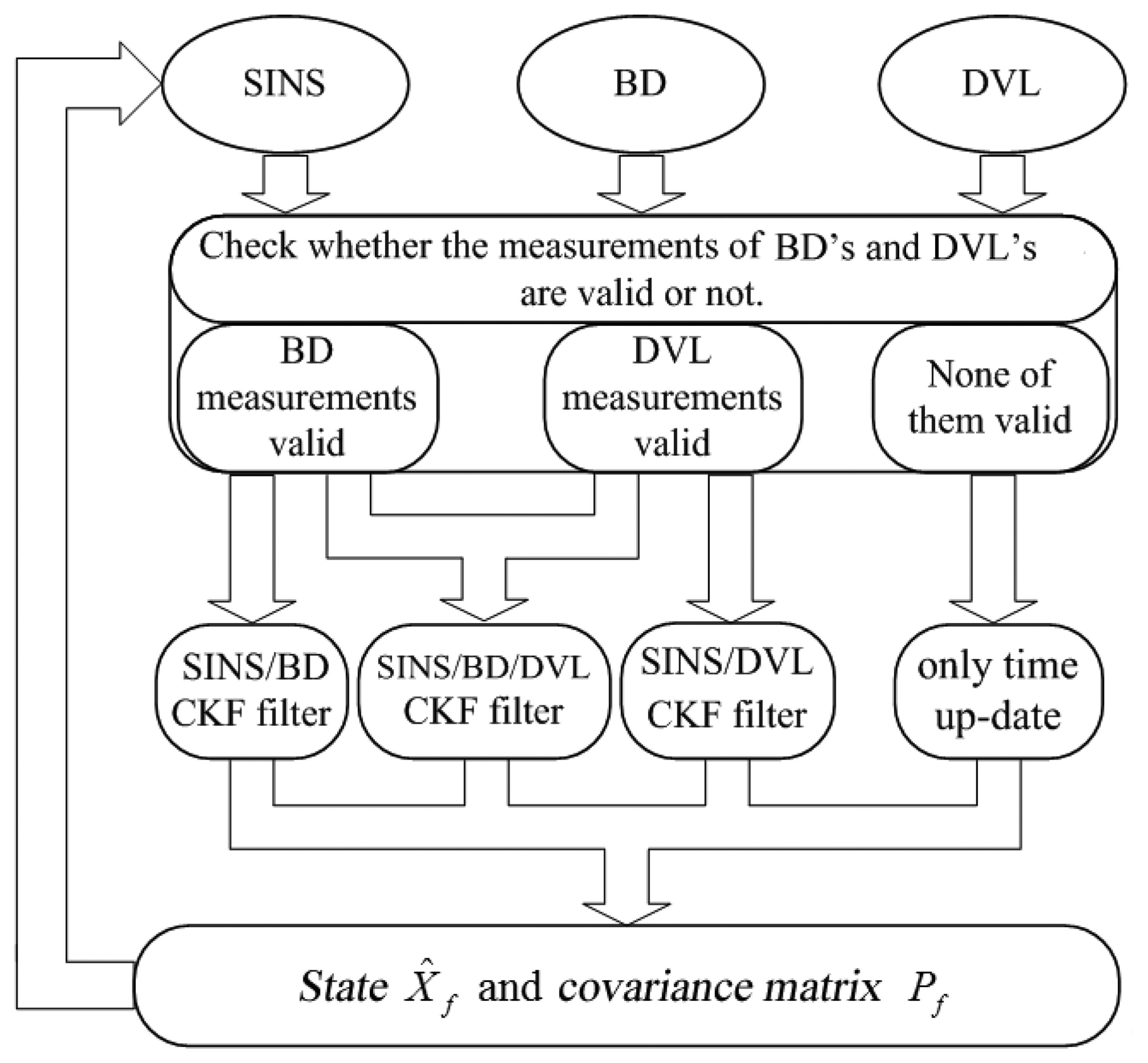
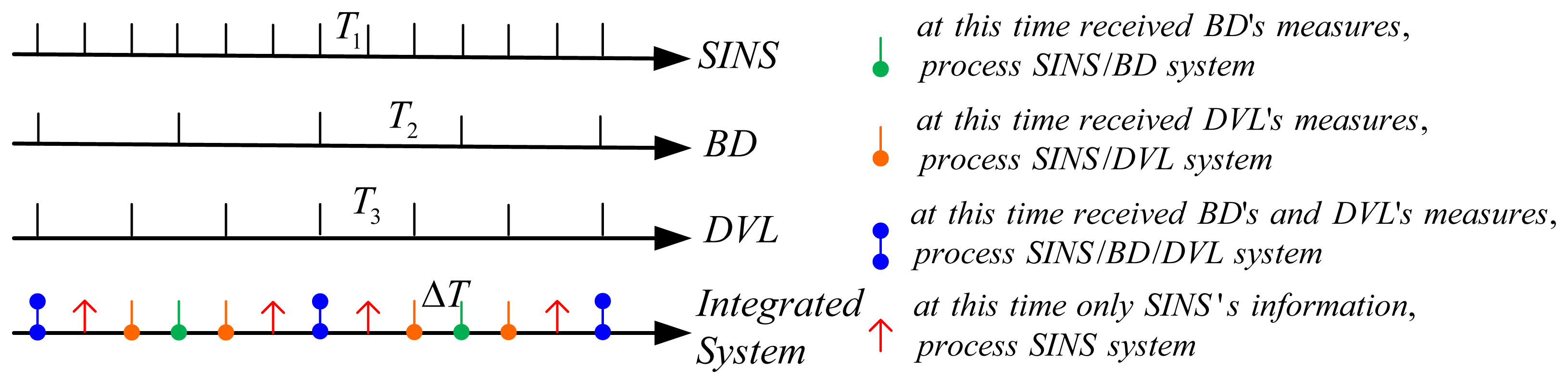
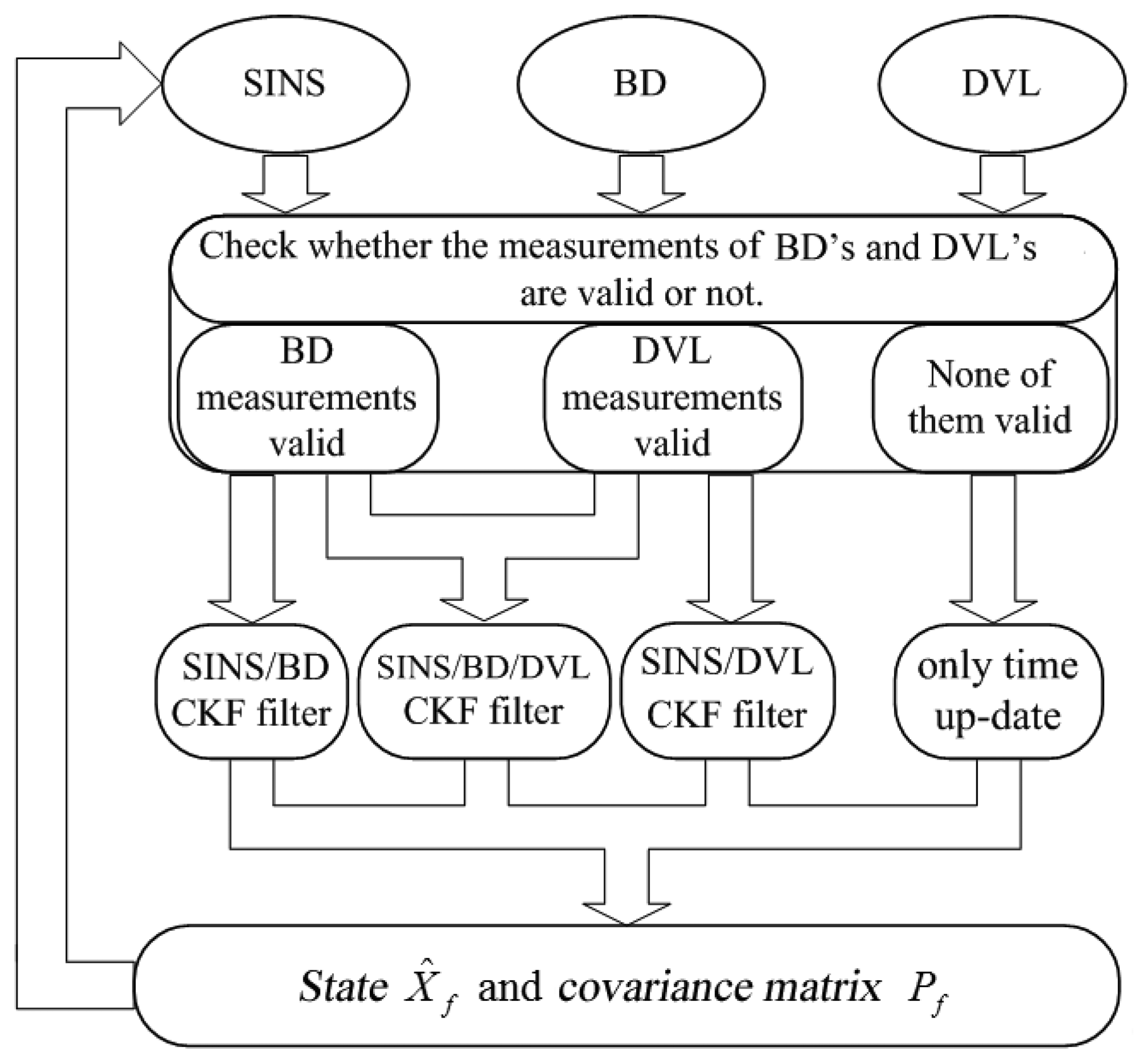
To solve the problem of asynchronism, a new method is proposed to establish the measurement equations. The multi-sensor measurements can be pre-processed separately. Then, the central fusion blends all of the pre-processed data to obtain the optimal state vector. Here, the measurements are divided into two groups: pseudo-ranges and pseudo-range rates as the measurements for the SINS/BD filter, and the velocity errors as measurements for the SINS/DVL filter.
The measurement equation for the SINS/BD filter is [8]:
The velocity error measurements between the SINS and the DVL are as follows:
4. Simulations and Results
Simulations were performed in this work. Their results are presented in this section. Suppose that the swing dynamic model of a marine vehicle is given by:
The initial conditions of different sensors are presented as follows:
- (1)
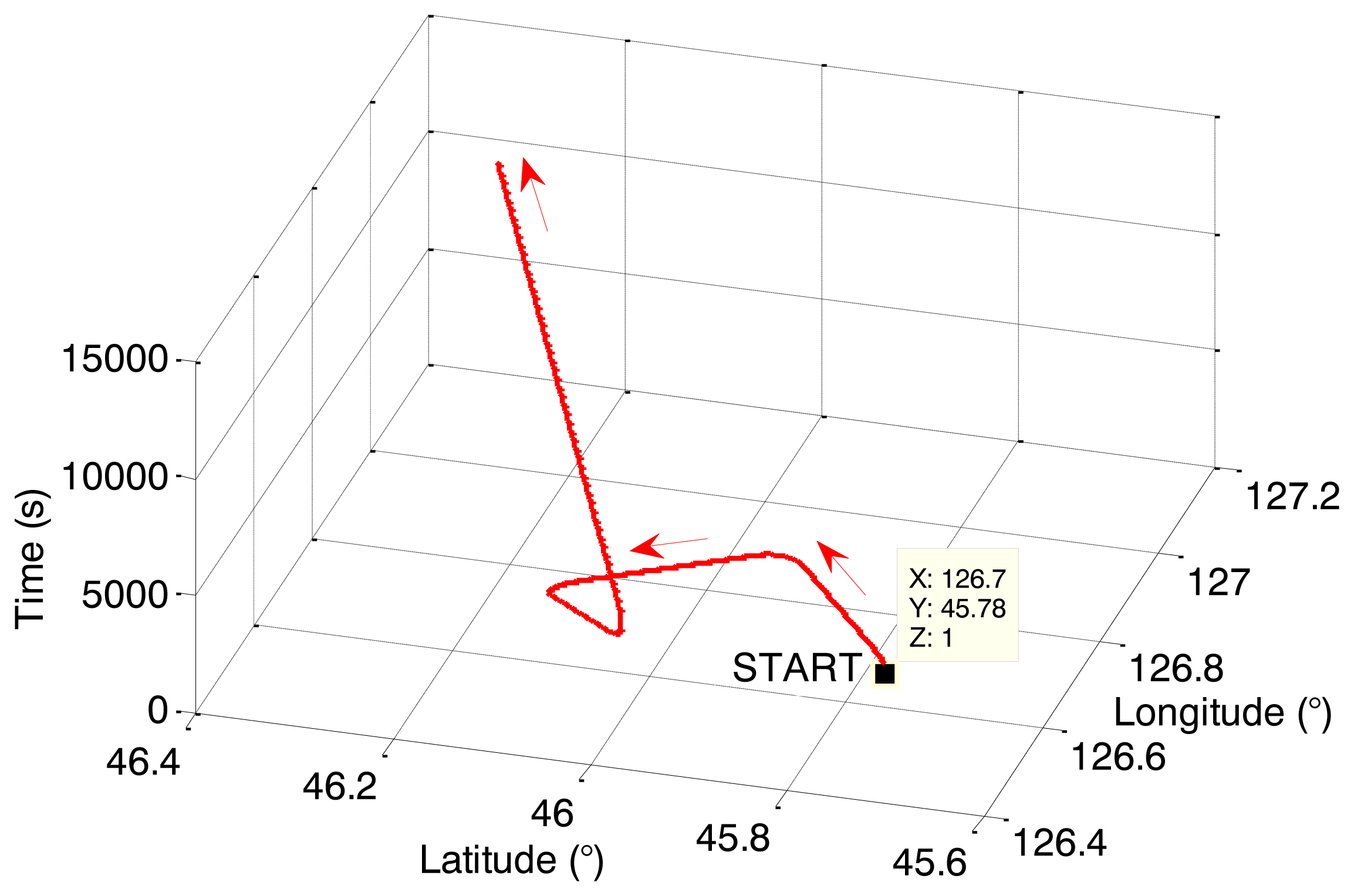
The initial latitude and longitude: φ = 45.7796°, λ = 126.6705°; their errors: δφ = 0.5°, δλ = 0.5°;
- (2)
The initial velocity components: νx = 0, νy = 0; their errors: δνx = 0.8 m/s, δνy = 0.8 m/s;
- (3)
The acceleration due to the gravity: g0 = 9.7805 m/s2;
- (4)
The initial misalignment angles: ϕx = 1°, ϕy = 1°, ϕz = 5°;
- (5)
The SINS gyro constant drifts: εx = εy = εz = 0.01°/h;
- (6)
The SINS gyro random noises: Wgx = Wgy = Wgz = 0.005°/h;
- (7)
The SINS accelerometer constant biases: ∇x = ∇y = 10−4 g0;
- (8)
The SINS accelerometer random noises: Wax = Way = 10−5 g0;
- (9)
The constant bias of the BD clock error: Δt = 30 m;
- (10)
The frequency drift of the BD clock error: δt = 0.01 m/s;
- (11)
The correlation time: τ = 30 min;
- (12)
The DVL velocity drift error: δVd = 0.05 m/s;
- (13)
The DVL scale factor error: δC = 10−4;
- (14)
The DVL drift angle error: δΔ = 1′;
- (15)
The correlation times of δVd and δΔ: , .
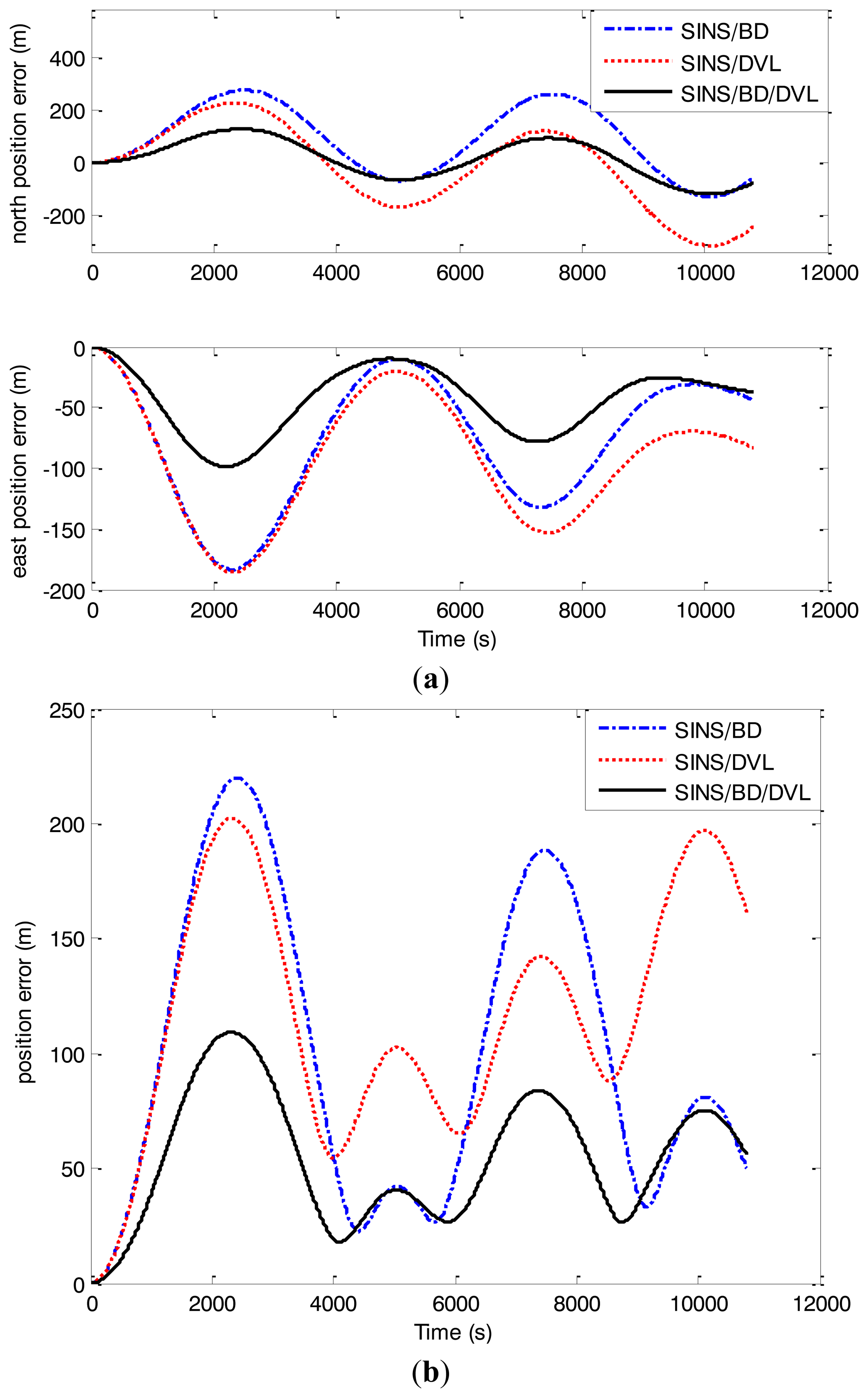
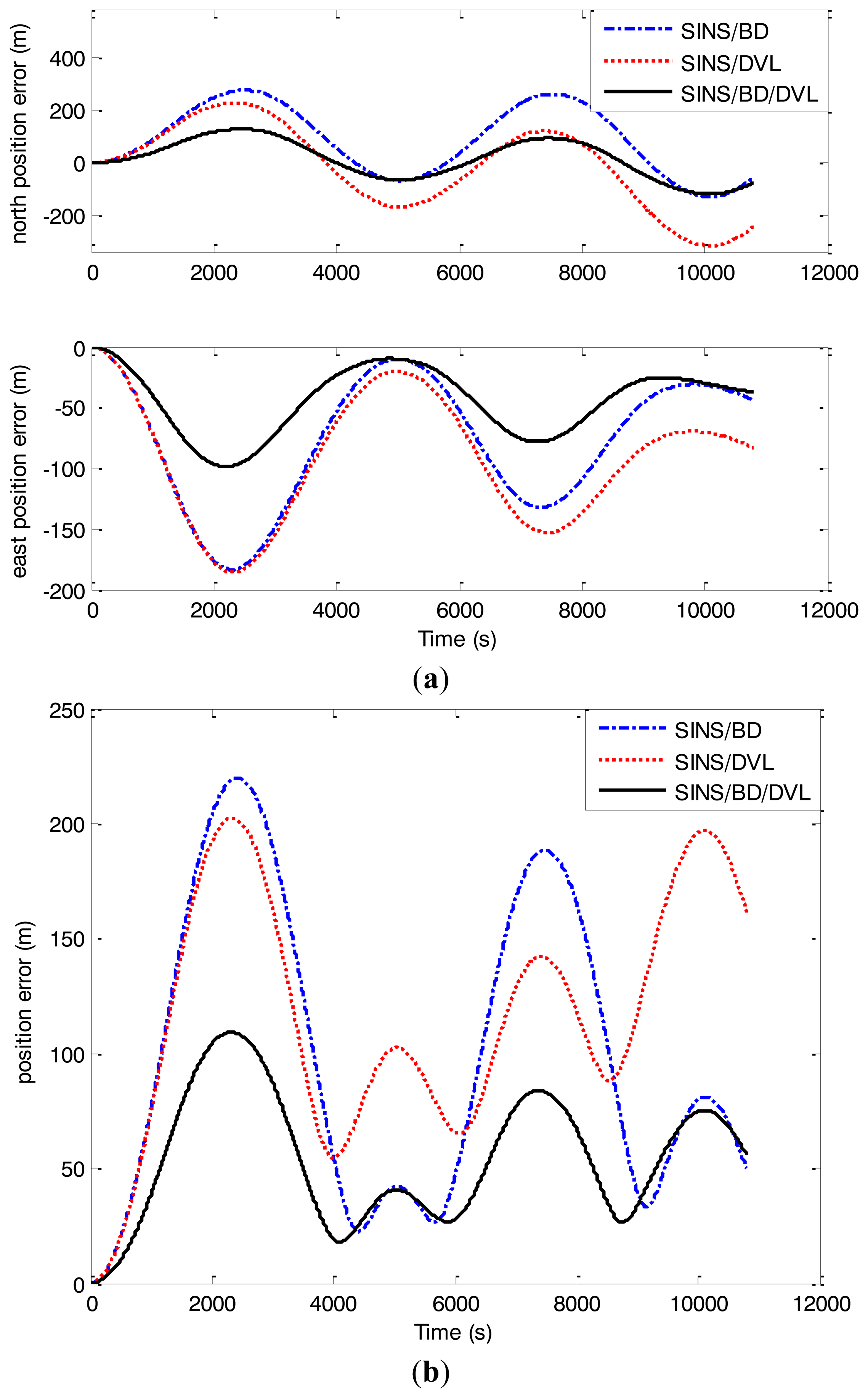
Under the same simulation conditions, the nonlinear algorithm based on CKF was used to estimate state vectors for the SINS/BD/DVL integrated navigation system. The solution was compared with the CKF solution only using the measurements from SINS/BDor from SINS/DVL. Assume the sampling intervals of BD and DVL are 0.5 s and 0.1 s, respectively, while the sampling interval of the fusion center is 0.05 s. First, the alignment lasted 15 min, and then the navigation was performed. The simulation results are presented in Figure 5 and Table 2. Here the north position error, the east position error and the position error are used to describe the performance of the simulation results in which the location error is as follows:
Figure 5 and Table 2 show that the north position error, the east position error and the position error from the SINS/BD/DVL integrated solution were much smaller than the errors from the subsystems: SINS/BD and SINS/DVL respectively. Besides, the position error converged rapidly with the proposed algorithm. By using the redundant and complementary measurements from the SINS/BD/DVL integrated navigation system, the novel algorithm can reduce the impact of the asynchronous problem. Thus, the position error can be decreased availably, and the navigation accuracy can be increased significantly. Since it was assumed that all sensors were independent in this research, the estimation results were suboptimal. The equipment errors, such as the gyro drifts, the accelerometer biases, and the misalignment angles, can also bring errors to the navigation solution. Considering the above reasons, the delivered results are acceptable and reasonable.
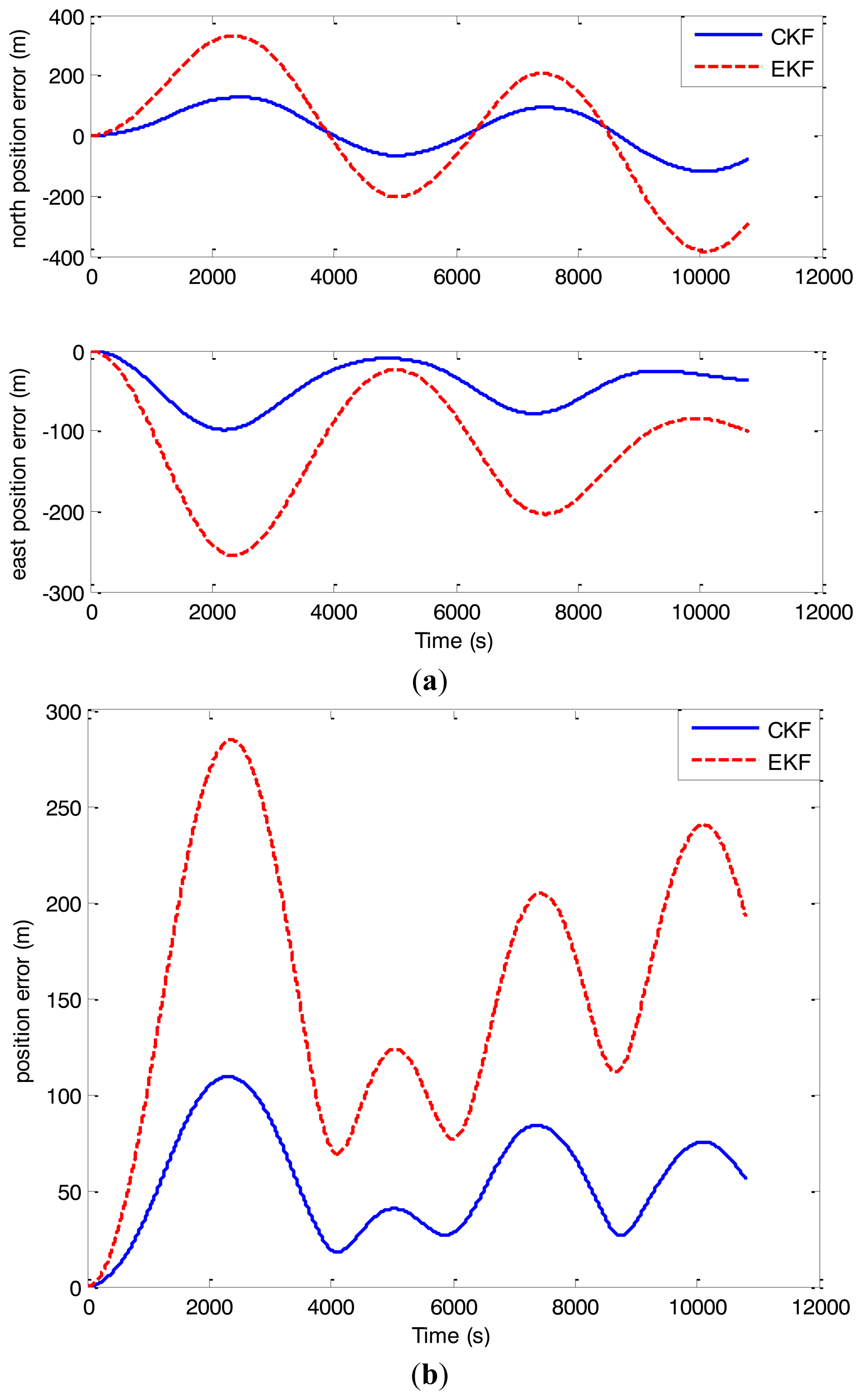
To prove the superiority of the proposed nonlinear asynchronous fusion algorithm based on CKF, another simulation was carried out with the traditional fusion algorithm based on EKF introduced in [11]. The simulation conditions were the same as indicated above. The simulation results are given in Figure 6 and Table 3.
As can be seen from Figure 6 and Table 3, compared with the traditional nonlinear fusion method based on EKF, the north position error, the east position error and the position error of the SINS/BD/DVL integrated navigation system are smaller with the new algorithm based on CKF. With the traditional method based on EKF the maximal position error was about 284 m as the one with the proposed integration algorithm was nearly 109 m. That is, the position error was decreased by 61.6%. As CKF uses cubature rule and 2N cubature point sets [ξi, ωi] to compute the mean and variance of probability distribution without any linearization of a nonlinear model, the filtering accuracy can be improved significantly. Hence, the higher navigation accuracy can be obtained based on CKF.
5. Conclusions
In this manuscript, a novel nonlinear integrated navigation algorithm based on CKF was proposed in order to solve the multi-sensor asynchronicitybproblem and reduce the high calculation load of the SINS/BD/DVL integrated navigation system. The main focus of this work was on establishing of a nonlinear system model and proposing of a new sampling principle to take multi-sensor asynchronism into account. The superiority of CKF was analyzed theoretically for the situation with the nonlinear system and measurement models. To verify the new navigation algorithm, numerical simulations were carried out. The results showed that the proposed nonlinear fusion algorithm based on CKF cannot only solve the asynchronicity problem of the SINS/BD/DVL integrated navigation system, but also significantly improve the navigation accuracy of the nonlinear system without imposing any additional calculation burden. However, under the assumption made in this study that all sensors in the integrated system were independent, the fusion results were suboptimal. Our future work will focus on a fusion algorithm that is suitable for multi-sensor asynchronous systems with the correlated noises.
Acknowledgments
The authors would like to thank Yonggang Zhang, Qian Sun and other reviewers for their helpful comments. This work was supported in part by the National Natural Science Foundation of China (51179039, 61203225) and the Fundamental Research Funds for Central Universities (No. heucf041420).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lupton, T. Inertial SLAM with Delayed Initialisation. Ph.D. Thesis, Department Mechanical and Mechatronic Engineering, The University of Sydney, Sydney, Australia, March 2010. [Google Scholar]
- Allotta, B.; Pugi, L.; Costanzi, R.; Vettori, G. Localization Algorithm for a Fleet of Three AUVs by INS, DVL and Range Measurements. Proceedings of the 15th International Conference on Advanced Robotics, Tallinn, Estonia, 20–23 June 2011; pp. 978–981.
- Einicke, G.A.; Falco, G.; Malos, J.T. Bounded constrained filtering for GPS/INS integration. IEEE Trans. Autom. Control 2013, 58, 125–133. [Google Scholar]
- Yuan, G.N.; Yuan, K.F.; Zhang, H.W. A Variable Proportion Adaptive Federal Kalman Filter for INS/ESGM/GPS/DVL Integrated Navigation System. Proceedings of the 4th International Joint Conference on Computational Sciences and Optimization, Kunming, China, 15–19 April 2011; pp. 978–981.
- Donovan, G.T. Position error correction for an autonomous underwater vehicle inertial navigation system using a particle filter. IEEE J. Ocean. Eng. 2012, 37, 125–133. [Google Scholar]
- Chen, C.H.; Zhao, X.L. Simulation Analysis of Positioning Performance of BeiDou-2 and Integrated BeiDou-2/GPS. Proceedings of 2010 International Conference on Communications and Mobile Computing, Shenzhen, China, 12–14 April 2010; pp. 505–509.
- Truong, D.M.; Tran, T.T.; Nguyen, T.D.; Ta, T.H. Recent Results in Receiving and Decoding Signals from the Beidou System. Proceedings of 2013 International Conference on Localization and GNSS (ICL-GNSS), Turin, Italy, 25–27 June 2013; pp. 1–4.
- Chen, C.H.; Zhao, X.L. Simulation Analysis of Positioning Performance of BeiDou-2 Satellite Navigation System. Proceedings of 2010 2nd International Conference on Advance Computer Control, Shenyang, China, 27–29 March 2010; pp. 148–152.
- Hua, B.; Liu, J.Y.; Xiong, Z.; Zhu, Y.H. Federal filtering algorithm in SINS/Beidou/STAR intehrated navigation system. J. Appl. Sci. 2006, 24, 120–124. [Google Scholar]
- Huang, X.F.; Wu, Q.Z. An Algorithm of Weighted Covariance for Centralized Asynchronous Fusion Based on Kalman. Proceedings of the 2012 Internation Confernce on Industrial Control and Electronics Engineering, Xi'an, China, 23–25 August 2012; pp. 1554–1557.
- Luo, C.; McClean, S.I.; Parr, G.; Teacy, L.; Nardi, R.D. UAV position estimation and collision avoidance using the extended Kalman filter. IEEE Trans. Veh. Technol. 2013, 62, 2749–2762. [Google Scholar]
- Suranthiran, S.; Jayasuriya, S. Optimal fusion of multiple nonlinear sensor data. IEEE Sens. J. 2004, 4, 651–663. [Google Scholar]
- Zhang, X.H.; Guo, H.D.; Xia, Z.J. An Asynchronous Multisensory Spatial Registration Algorithm. Proceedings of the Fourth International Conference on Fuzzy System and Knowledge Discovery, Haikou, China, 24–27 August 2007; pp. 16–20.
- Lin, C.M.; Hsueh, C.S. Adaptive EKF-CMAC-based multisensory data fusion for maneuvering target. IEEE Trans. Instrum. Meas. 2013, 62, 2058–2066. [Google Scholar]
- Sun, G.H.; Wang, M.; Wu, L.G. Unexpected results of extended fractional kalman filter for parameters identification in fractional order chaotic systems. Int. J. Innov. Comput. 2011, 7, 5341–5352. [Google Scholar]
- Rashid, U.; Tuan, H.D.; Apkarian, P.; Kha, H. Globally optimized power allocation in multiple sensor fusion for linear and nonlinear networks. IEEE Trans. Signal Process. 2012, 60, 903–915. [Google Scholar]
- Gundimada, S.; Asari, V.K. Facial recognition using multisensor images based on localized Kernel Eigen spaces. IEEE Trans. Image Process. 2009, 18, 1314–1325. [Google Scholar]
- Hu, H.D.; Huang, X.L. SINS/CNS/GPS integrated navigation algorithm based on UKF. J. Syst. Eng. Electron. 2010, 21, 102–109. [Google Scholar]
- Arasaeatnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar]
- Arasaeatnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman filters for continuous-discrete system: Theory and simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar]
- Pakki, K.; Chandra, B.; Gu, D.W.; Postlethwaite, I. Cubature Information Filter and Its Applications. Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 3609–3614.
- Arasaeatnam, I.; Haykin, S. Cubature Kalman smoothers. J. Autom. 2011, 47, 2245–2250. [Google Scholar]
- Zhou, B.C.; Cheng, X.H. Federated Filtering Algorithm Based on Fuzzy Adaptive UKF for Marine SINS/GPS/DVL Integrated System. Proceedings of the 2010 Chinese Controland Decision Conference (CCDC 2010), Xuzhou, China, 26–28 May 2010; pp. 2082–2085.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motions States | Time (s) | Acceleration (m/s2) |
|---|---|---|
| 1. Mooring | 0–300 | ax = ay= 0 |
| 2. Accelerated motion | 300–620 | ax = 0.025, ay = 0.035 |
| 3. Uniform motion | 620–1,620 | ax = ay= 0 |
| 4. Accelerated motion | 1,620–2,100 | ax = −0.04, ay = 0.005 |
| 5. Uniform motion | 2,100–3,100 | ax = ay= 0 |
| 6. Accelerated motion | 3,100–3,700 | ax = 0.007, ay = −0.035 |
| 7. Uniform motion | 3,700–5,200 | ax = ay= 0 |
| 8. Accelerated motion | 5,200–6,200 | ax = 0.018, ay = 0.015 |
| 9. Uniform motion | 6,200–10,800 | ax = ay= 0 |
| Different Sensor Data | Maximal Errors (m) | ||
|---|---|---|---|
| North Position Error | East Position Error | Position Error | |
| SINS/BD | 275.1 | −183.4 | 219.8 |
| SINS/DVL | −314.5 | −185.9 | 202.3 |
| SINS/BD/DVL | −118.6 | −98.7 | 109.1 |
| Different Filters | Maximal Errors (m) | ||
|---|---|---|---|
| North Position Error | East Position Error | Position Error | |
| EKF | −384.4 | −255 | 284.5 |
| CKF | −118.6 | −98.7 | 109.1 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Gao, W.; Zhang, Y.; Wang, J. A Strapdown Interial Navigation System/Beidou/Doppler Velocity Log Integrated Navigation Algorithm Based on a Cubature Kalman Filter. Sensors 2014, 14, 1511-1527. https://doi.org/10.3390/s140101511
Gao W, Zhang Y, Wang J. A Strapdown Interial Navigation System/Beidou/Doppler Velocity Log Integrated Navigation Algorithm Based on a Cubature Kalman Filter. Sensors. 2014; 14(1):1511-1527. https://doi.org/10.3390/s140101511
Chicago/Turabian StyleGao, Wei, Ya Zhang, and Jianguo Wang. 2014. "A Strapdown Interial Navigation System/Beidou/Doppler Velocity Log Integrated Navigation Algorithm Based on a Cubature Kalman Filter" Sensors 14, no. 1: 1511-1527. https://doi.org/10.3390/s140101511