Throughput and Energy Efficiency of a Cooperative Hybrid ARQ Protocol for Underwater Acoustic Sensor Networks


Abstract
: Due to its efficiency, reliability and better channel and resource utilization, cooperative transmission technologies have been attractive options in underwater as well as terrestrial sensor networks. Their performance can be further improved if merged with forward error correction (FEC) techniques. In this paper, we propose and analyze a retransmission protocol named Cooperative-Hybrid Automatic Repeat reQuest (C-HARQ) for underwater acoustic sensor networks, which exploits both the reliability of cooperative ARQ (CARQ) and the efficiency of incremental redundancy-hybrid ARQ (IR-HARQ) using rate-compatible punctured convolution (RCPC) codes. Extensive Monte Carlo simulations are performed to investigate the performance of the protocol, in terms of both throughput and energy efficiency. The results clearly reveal the enhancement in performance achieved by the C-HARQ protocol, which outperforms both CARQ and conventional stop and wait ARQ (S&W ARQ). Further, using computer simulations, optimum values of various network parameters are estimated so as to extract the best performance out of the C-HARQ protocol.1. Introduction
Underwater acoustic sensor networks (UASNs) are attracting huge interest due to their wide variety of applications, such as environmental monitoring, resource investigation, detection of phenomena related to natural disasters, etc. Naturally, all these mission-critical applications highly require reliable data transmission techniques.
To design a feasible transmission scheme, it is important to take into account the harsh and limited conditions of the underwater environment. Radio signals suffer from severe path losses in underwater scenarios, thus acoustic signals are typically employed. However, underwater acoustic links also suffer from path losses, time varying multi-path fading, motion-induced Doppler spread and aquatic noise. As a result, the underwater acoustic link often offers a high bit error rate (BER). To establish reliable communications under such poor channel conditions, an efficient retransmission scheme is needed. In general, Automatic Repeat reQuest (ARQ) schemes have been used to achieve high reliability in data transmission. Especially, in underwater acoustic sensor networks, the S&W ARQ protocol has been employed as the only way of retransmission due to the half duplexing mode of underwater acoustic modems [1,2], but high BER of the acoustic channel along with long propagation delays are making it more challenging to achieve high throughput efficiency with the conventional S&W ARQ. In recent years, several modifications in S&W ARQ have been used to improve its efficiency. Cooperation-based ARQ is one of these alternatives which utilizes the communication channels of neighbor nodes to achieve a form of cooperative diversity that can provide significant performance improvement. Particularly for UASNs, CARQ has been studied to achieve throughput enhancements [3], among other benefits [4–7].
For terrestrial wireless sensor networks (WSNs) too, cooperation-based ARQ strategies have been studied and proved very efficient [8,9]. As evident from the past literature, ARQ techniques have always benefitted from the utilization of FEC codes for improving their performance; obviously, the cooperation-based ARQ schemes are also eligible to employ them. For terrestrial wireless networks, the expected enhancement in performance when a cooperation-based ARQ is combined with the error correction technique of IR-HARQ, to form a cooperative hybrid ARQ, has also been verified [10–12].
Naturally, this concept of cooperative hybrid ARQ can be applied to UASNs as well, so as to extract the best performance, at least from the link layer, under the constraints of the harsh underwater environment. However, the performance results of cooperative hybrid ARQs obtained for terrestrial sensor networks cannot be directly applied to underwater sensor networks, because of the significant distinctions in BER and propagation delay (sound speed = 1,500 m/s, speed of radio signals = 3 × 108 m/s). Especially for underwater environments, the one-by-one transmission of the redundancies of IR-HARQ might accumulate enough long delays to nullify any performance gains achieved by error-correction coding. Thus, in order to fully extract the performance gains of C-HARQ, the protocol needs to be designed and studied exclusively for underwater scenarios. To the best of our knowledge, a cooperative hybrid ARQ (C-HARQ) protocol for UASNs has not yet been designed and investigated; hence this paper presents a C-HARQ protocol which employ RCPC codes to implement IR-HARQ along with cooperation features.
Moreover, sensor networks have large numbers of nodes located in close proximity with each other, which makes it important to consider the effect of multiple neighbor nodes on throughput and energy efficiency when designing any cooperative protocol for UASNs. However, the previous analysis considers only single relay assisted cooperation [10–12]. In this paper, C-HARQ has been designed keeping in mind the presence of multiple sensor nodes in the neighborhood, which could play a significant role in improving the throughput performance.
Further, the underwater sensor nodes have limited energy sources (batteries) which cannot be easily replenished; that makes energy consumption a major issue when designing any sensor network protocol. Even high throughput protocols must be energy efficient in order to extend the network lifetime for long lasting sensor applications. Thus, energy efficiency has been used as one of the metrics for performance evaluation, along with throughput efficiency. Additionally, we compare the energy consumption burden that is carried by the neighbor nodes in providing cooperation for CARQ and C-HARQ protocols. It reveals that C-HARQ transfers less burden on the neighbor nodes compared to CARQ, while still fully utilizing them for cooperation.
Some earlier work on combination of ARQ and FEC has been done for underwater scenarios [13,14]. A hop-by-hop and block-by-block technique of transferring encoded packets has been adopted [13], but lacks the utilization of cooperative transmission. Relay-assisted HARQ has been studied [14], which primarily focused on the implementation of Luby Transform (LT) codes in IR-HARQ, not on the energy consumption analysis, or the effect of multiple relays on throughput and energy expenditure.
In this paper, we propose and study the C-HARQ protocol of error control for underwater scenarios using RCPC codes to maximize throughput and energy efficiency. The main contributions of this paper can be summarized as follows:
Achievement of better throughput performance by C-HARQ, compared to CARQ and S&W ARQ under similar network conditions.
Optimum data packet size for C-HARQ.
Optimum number of FEC packets for C-HARQ.
Maximum achievable throughput performance of C-HARQ.
Performance comparison in terms of energy consumption.
Performance analysis of C-HARQ against varying BER.
The rest of the paper is organized as follows: Section 2 presents the preliminaries to the C-HARQ protocol. Section 3 presents C-HARQ protocol design in detail, including the network model and the packet format. The performance metrics used to compare the various protocols are defined and expressed in Section 4. Section 5 presents the simulation results and their discussions in detail. Finally, the concluding remarks are presented in Section 6.
2. Preliminaries to the C-HARQ Protocol
The basic idea behind C-HARQ is to merge cooperative ARQ with a hybrid ARQ technique, so as to utilize the benefits of both the schemes. While CARQ can provide a form of spatial diversity, hybrid ARQ introduces error correction capabilities, thus presenting the possibility of achieving both high throughput and efficient performance. Before going into the details of C-HARQ, a brief discussion of hybrid ARQ and CARQ is presented in the following subsections.
2.1. Incremental Redundancy-HARQ and RCPC Codes
For any wireless network, when a basic ARQ scheme is combined with forward error-correcting coding, the resulting error-control scheme is called Hybrid ARQ (HARQ). In HARQ, the original data is encoded with a FEC code, and the redundant FEC bits are either immediately transmitted along with the data or on request from the destination when it detects errors. Based on these two different techniques, two types of HARQ are defined: Type-I and Type-II. In Type-I HARQ, the source always transmits/retransmits the entire code (consisting of data bits and redundant FEC bits) to the destination, whereas in Type-II HARQ (also known as Incremental Redundancy-HARQ), only part of the data is transmitted at first, and the FEC part (which may be further divided into smaller FEC packets) is sent later to the destination, when required. The destination then combines the erroneous data packets with these transmitted redundancies to attempt forward error correction. Generally, Type-I HARQ suffers from capacity losses under good channel conditions because of the extra redundancy introduced, which may be twice the size of data in some FEC codes, whereas, IR-HARQ does not suffer from such a loss, as it expends channel capacity only when needed; it also performs with good sensitivity under poor channel conditions because of the coding gain. Thus, in this paper, IR-HARQ is selected as the HARQ technique, to be combined with CARQ, primarily because of its on-demand method of forward error correction.
To implement IR-HARQ, the most commonly used error-correcting codes are the rate-compatible punctured convolution (RCPC) codes [15]. They employ a convolution encoder equipped with predefined puncturing patterns to generate redundancies of IR-HARQ. At first a suitable convolution encoder is used to encode d-bit data into m-bit codewords called the Mother code (code rate = d/m). Then, by using a suitable puncturing pattern, some bits in the Mother code are deleted, to be left with a punctured codeword of higher code rate. The punctured mother code forms the message for original transmission and the deleted bits are enclosed into multiple packets to form the FEC packets, which are sent later. The probability of error correction increases when the erroneous message is decoded along with the following FEC packets. The detailed description of the packet formation technique, using convolution coding and puncturing, is presented in Section 3.
2.2. Cooperative ARQ
CARQ is basically a stop-and-wait mode of error control that exploits a form of spatial diversity provided by the nodes in the neighborhood of the source and destination. This spatial diversity is achieved by employing the neighbor nodes to work in cooperation with the source node during the retransmission process. The possibility of cooperation arises from the fact that transmission over wireless channels is a broadcast in nature and thus allows the neighbor nodes to overhear the data transmitted by the source. This phenomenon enables the neighbor nodes to act as alternate sources for the current data. In case of failure in data transmission from the main source node, the destination calls for cooperation from these alternate sources to transmit their overheard data. The main advantage of this method lies with the possibility of finding multiple, and relatively better, communication channels of the neighbor nodes which significantly increases the chance of successful retransmission. Thus, this cooperation based operation boosts the throughput performance of an ordinary S&W ARQ to a much higher level [3]. The performance of the simple CARQ can be further improved if the error-correcting codes could come into play. To realize that, C-HARQ protocol is designed in the following section.
3. Proposed C-HARQ Protocol Design
The merger of CARQ and IR-HARQ can be achieved primarily in two ways: (1) using the neighbor nodes to transmit data as well as error correction information; (2) using the neighbor nodes to transmit only the error correction information. In case 1, the neighbor nodes simply act as an alternate source of data as well as error correction bits; consuming the same amount of energy as the source, thus losing a significant part of its own energy resource in delivering others' data. Case 2, on other hand, tries to transfer as less a burden as possible to the neighbor nodes while still fully utilizing their cooperation. This is accomplished by asking the neighbor nodes to transmit only the error correction redundancies, called the FEC packets, when needed, to the destination, while it remains the source responsible for the data part. The smaller size of the FEC packets causes comparatively less energy consumption. Moreover, an FEC packet from a neighbor node can still be utilized even if it gets corrupted in some bits, whereas even a single error in data packet will result in wastage of the resources consumed in transmitting that packet. Thus, for the C-HARQ protocol we prefer the second option, where the neighbor nodes are burdened of transmitting only the smaller FEC packets that carry the information for correcting errors, thus providing the opportunity of boosting throughput performance with better energy efficiency. The system model used to implement the C-HARQ protocol along with the detailed description of the cooperation mechanism employed to transfer the FEC information to the destination is presented as follows.
3.1. Network Scenario
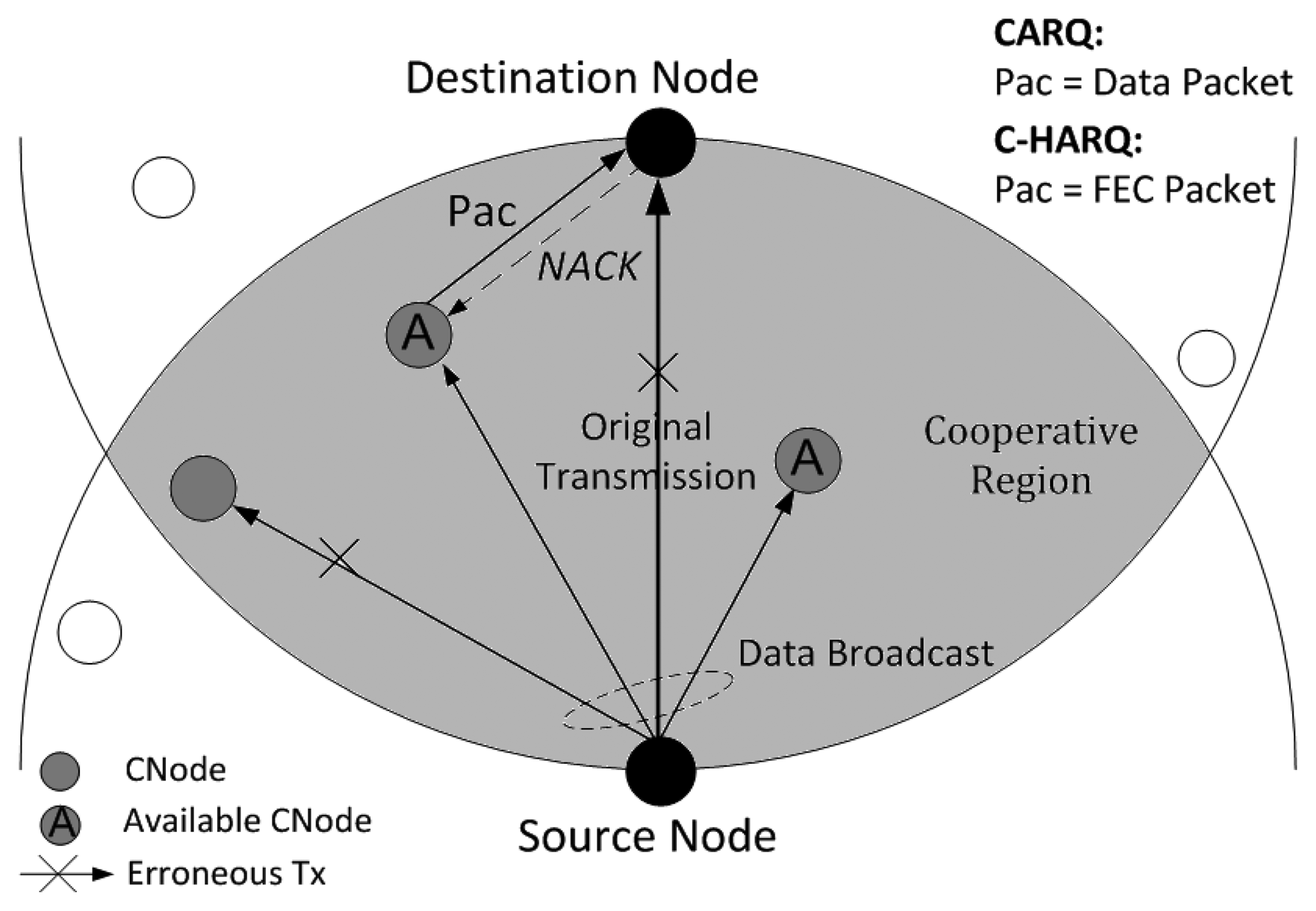
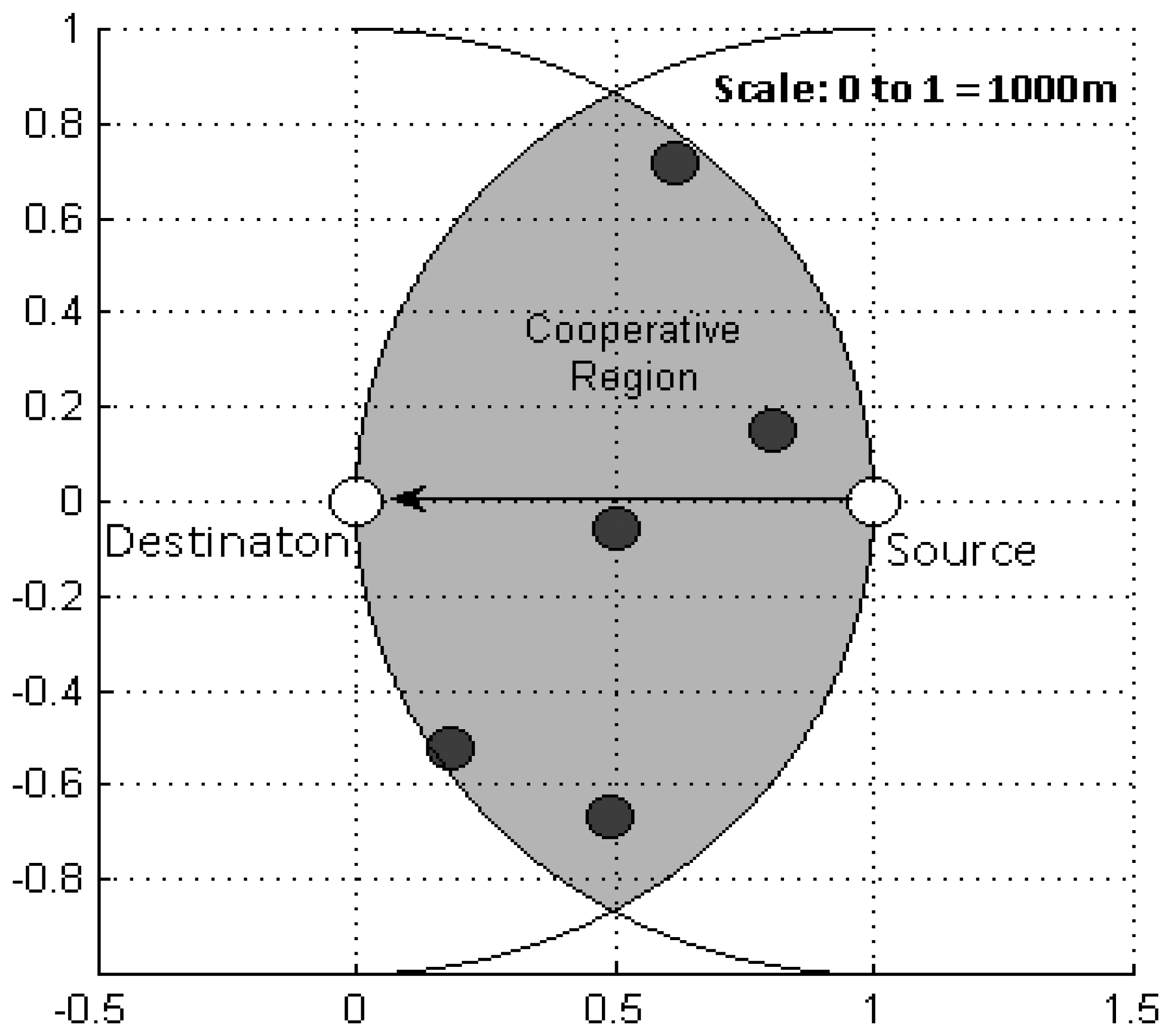
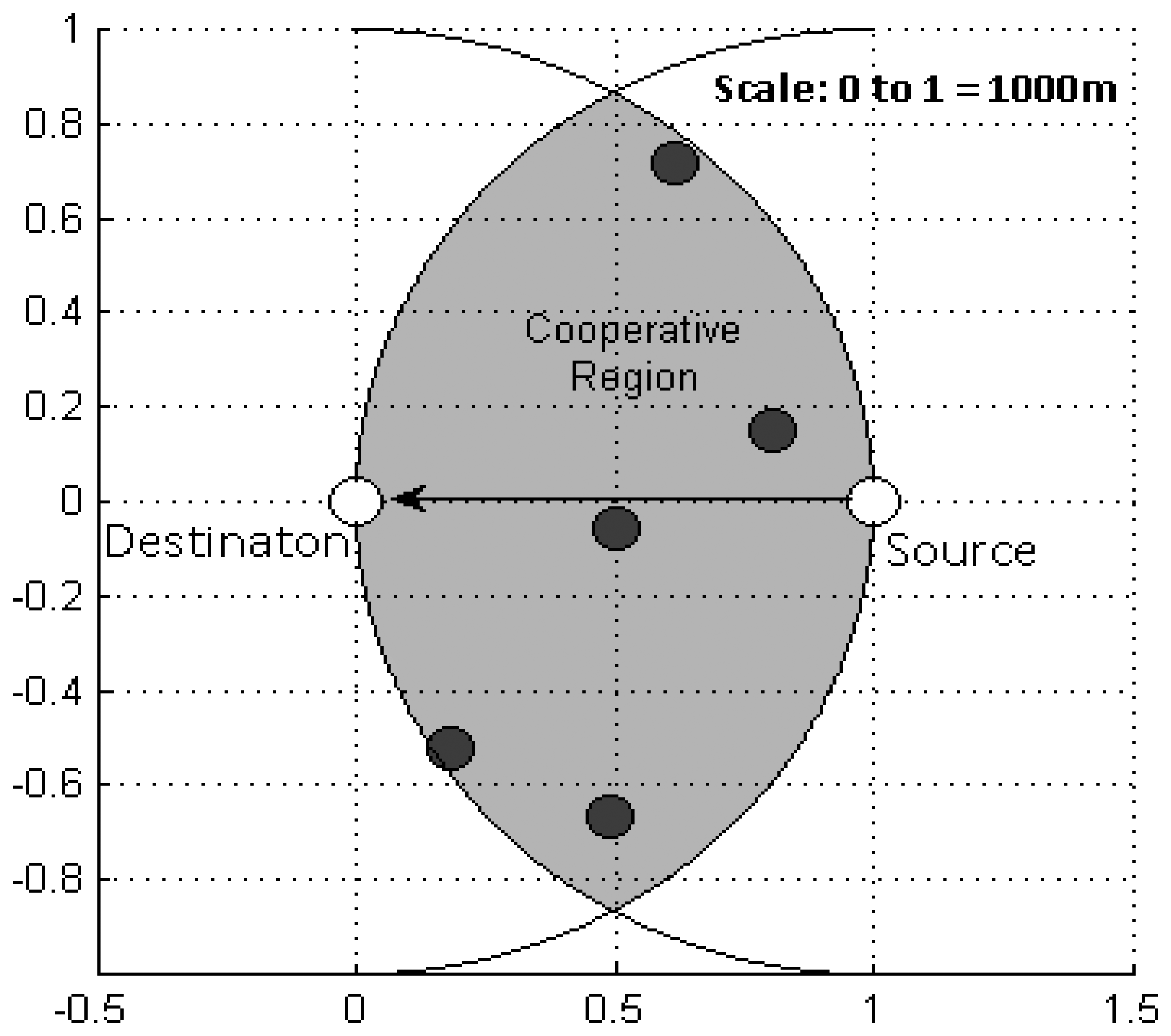
As this work primarily focuses on the ARQ aspect, not on medium access control (MAC) issues, we have assumed that all the media access issues have been resolved so that the underwater sensor network under consideration is only a single-hop case between a source and a destination with some neighbour nodes in the surroundings. All the nodes remain static at their respective positions. The network scenario is depicted in Figure 1.
The overlapped area between two circles having a same radius of the source-to-destination distance, each centered at source and destination is called the cooperative region. Any neighbour node within this region can overhear any transmission from the source and destination and, hence, has the potential to provide cooperation; thus these nodes are hereafter referred to as cooperative nodes (CNodes).
3.2. The Cooperation Mechanism
The main cooperation mechanism of C-HARQ protocol is basically similar to that of CARQ. A success in the original data transmission is acknowledged, by the destination, by sending a positive acknowledgement (ACK) signal to the source; whereas on reception of erroneous data, destination opts for a cooperation process instead of immediately sending a negative acknowledgement (NACK) signal. Meanwhile, some (or all) of the CNodes becomes available for cooperation (holding either a data packet, for CARQ, or FEC packets, for C-HARQ) depending on whether they succeeded or failed in correctly overhearing the broadcasted data. When the destination calls for cooperation, these available CNodes let the destination know about their availability by a proper signaling mechanism (described later in Section 3.4). The destination, then, asks the available CNodes, one-by-one, to transmit the packets they hold until the retransmission/recovery is successful. A successful recovery of original data from the cooperation process is conveyed to the source and the CNodes by transmitting an ACK. However, if the cooperation process fails too, a NACK is transmitted to ask the source to retransmit the data, which starts the whole process from the beginning.
3.3. Packet Generation
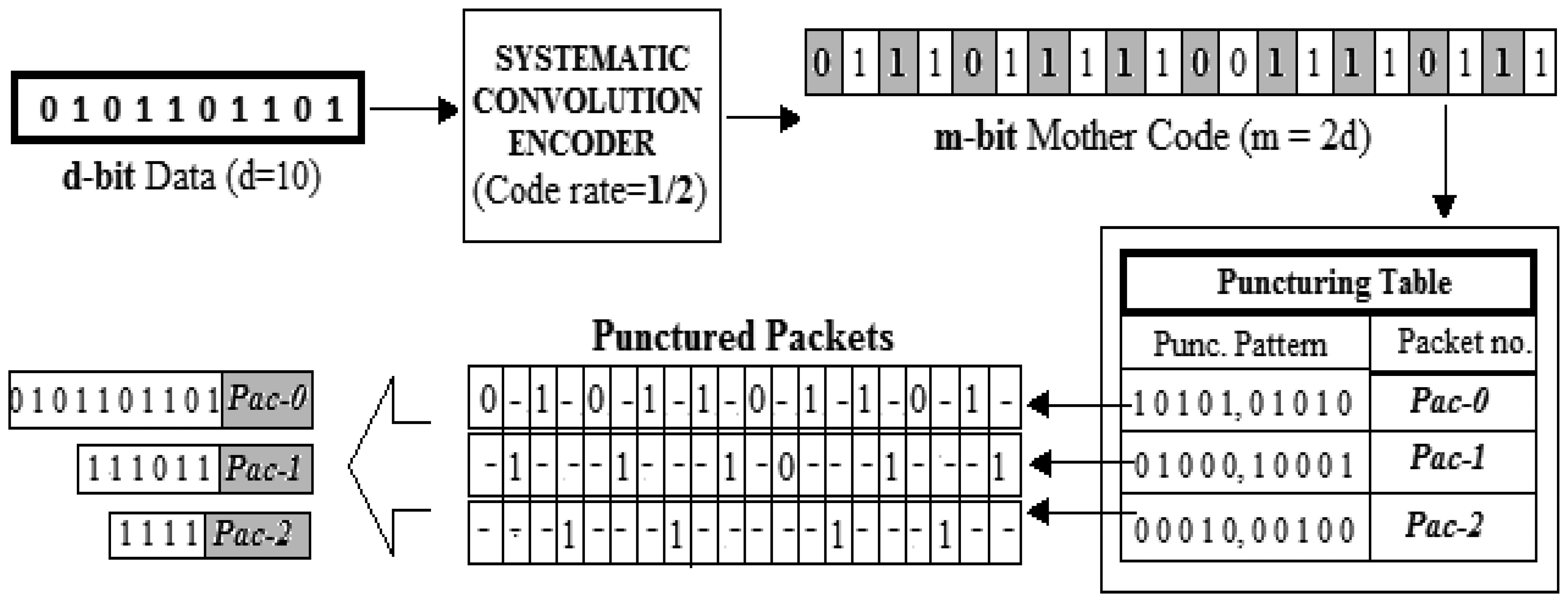
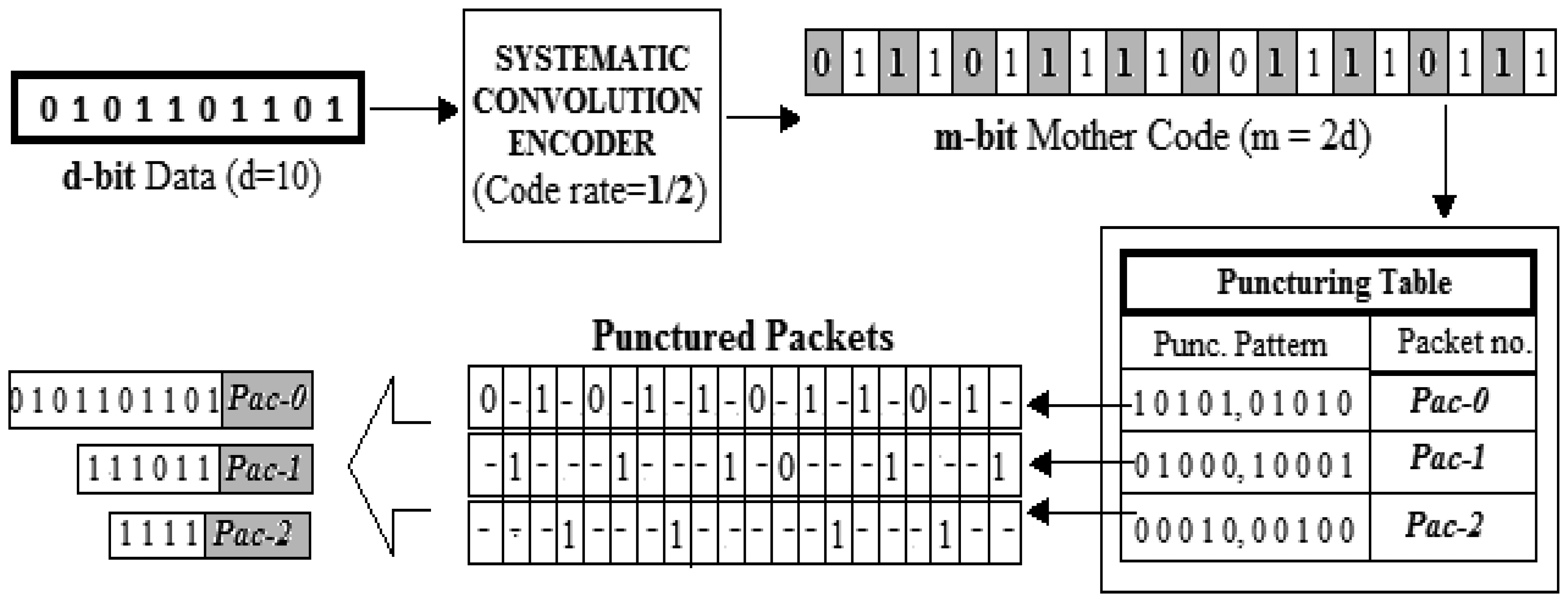
The system consists of mainly three types of packets: data packets (main message packets), FEC packets and signalling packets. The message packet and FEC packets are generated using a convolution encoder with puncturing enabled. The punctured mother code at the output of the encoder forms the main message packet while the punctured bits form the FEC packets. The convolution encoder is configured in such a way that the punctured mother code produced is exactly the same as the original data that was fed to the input of the encoder. Thus, the main message packet contains only data bits and is, hereafter, referred to simply as the data packet. This allows the source to be exempted from the burden of going through the encoding process to generate the main message packet which is actually the data part only. The other punctured outputs of the encoder form the FEC packets.
The convolution encoder thus used is a systematic convolution encoder [16]; a code is systematic if the input data bits are embedded in the output mother code. Figure 2 explains the coding and the puncturing process with an example. At first a 10-bit data is encoded into a 20-bit mother code (code rate = 1/2) with data bits (highlighted bits) and FEC bits occupying the odd and even positions, respectively. Next, the mother code is punctured using some predefined puncturing patterns to get multiple packets at the output. By using the pattern [1010101010], the redundant FEC bits are deleted from mother code (positions with “−”) to get the payload of the data packet i.e., Pac-0. Thus, Pac-0 contains only the data bits and therefore, from hereafter, refers to the original data packet in the system. Similarly, utilising the other puncturing patterns, FEC bits are recovered from the mother code to be the payload of the FEC packets; represented by Pac-1, Pac-2…Pac-Nmx. In the above example, Nmx is set to 2.
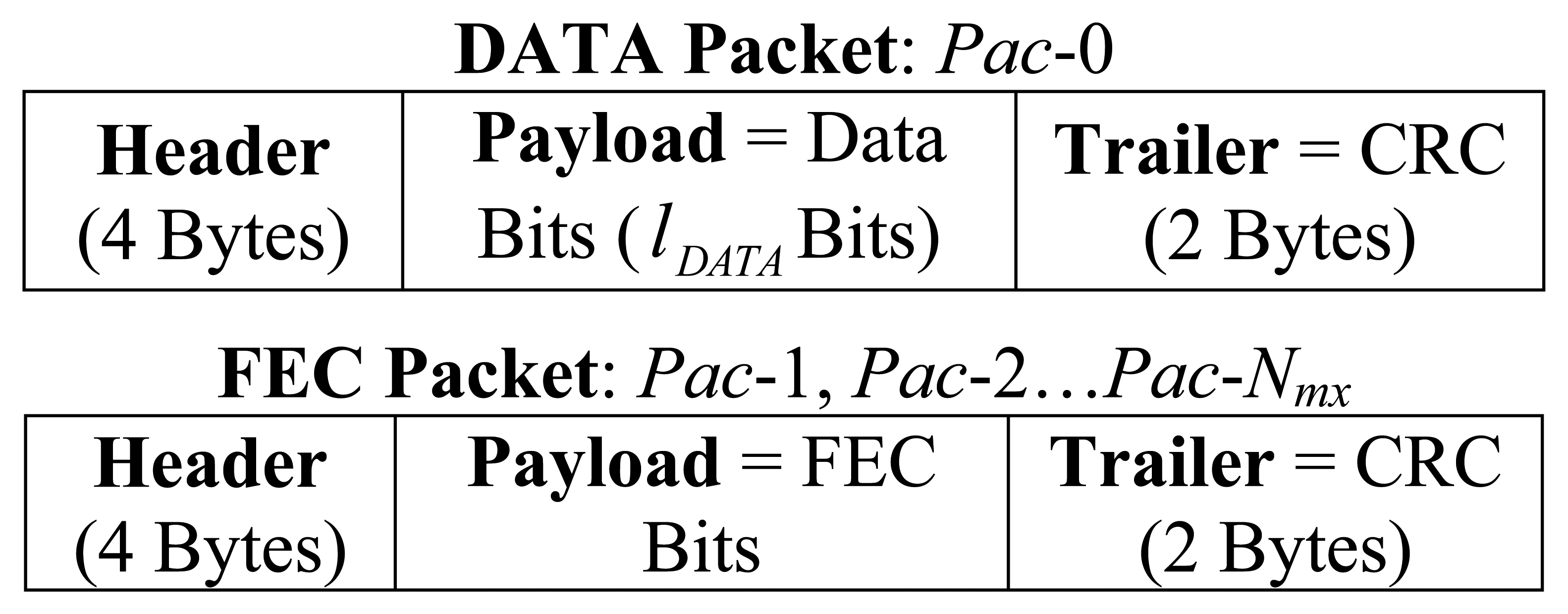
To these raw packets, a four byte header and a two byte trailer are added to form the final link layer packets, shown in Figure 3. The header field consists of packet ID (1 Byte), source ID (1 Byte), destination ID (1 Byte), and packet sequence number (1 Byte). The trailer is composed of 16-bit Cyclic Redundancy Check (CRC) to facilitate error detection.
3.4. Scheme Description
We now proceed to describe the C-HARQ protocol of error-control for data transmission from a particular source to a destination. The scheme works in the following subsequent phases:
Transmission of Pac-0 by Source.
Discovery of available Cooperative nodes.
Cooperation process.
Transmission of ACK/NACK by Destination.
Phases 2 and 3 come into play only when an error is detected at the destination. As mentioned earlier, the source is not involved in any convolution encoding process. The source is only concerned with sending/resending the current or the next data packet, from its packet buffer, depending on the type of acknowledgement received from the destination. Encoding process is required only at the CNodes to generate the FEC packets using the overheard Pac-0.
The source starts Phase1 by transmitting the Pac-0 that is present at the top of its packet buffer, to the destination. This transmission, which is a broadcast in nature, is also overheard by the CNodes. The CNodes individually compute CRC to check for errors in the overheard Pac-0. Those CNodes which correctly receive Pac-0, encode it into Pac-1, Pac-2…Pac-Nmx, and saves them at the top of their individual packet buffer, to become “available” for cooperation. Other CNodes discard the erroneous overhearing and remain silent.
Meanwhile, at the destination end, error detection is applied to the received Pac-0 and steps are taken accordingly:
Phase 2 and 3 are skipped and an ACK is immediately sent to the source by destination. Upon overhearing ACK, the CNodes drops the current FEC packets from the top of their packet buffer:
Destination saves the erroneous Pac-0 in its packet buffer as saved_Pac-0 and enters Phase 2 by broadcasting a “Request for Cooperation” (CReq) signal. Prior to the broadcast, the destination initializes enough memory space in its packet buffer for the upcoming FEC packets meant for error correction. On overhearing the CReq signal, the source continues to remain in “idle” mode waiting for an ACK or NACK signal to respond to. By doing so it temporarily leaves the responsibility of recovering Pac-0 to the cooperation process. In our system model, we have assumed that a node operates in idle-mode when it is involved in none of the following activities: transmitting, receiving or convolution decoding.
Meanwhile, the available-CNodes respond to CReq by individually transmitting the “Availability for Cooperation” (CAvl) signals to the destination. To make the collisions of CAvl less likely, a proper media access protocol (like a Random Back-Off algorithm) can be used here. However, for our performance analysis, this probability of collision is neglected due to the very small size of CAvl and location of CNodes at a random distance from the destination. The destination, after transmitting CReq, waits for a maximum of “Tc” amount of time to allow all the availability signals to reach the destination before the commencement of the cooperation process. The value of “Tc” is set to twice the source-to-destination propagation delay so that the CAvl signals, even from the farthest CNodes (located at a distance of source-to-destination distance from both the source and the destination), have enough time to reach the destination. Upon expiration of this waiting time, the destination saves all the received CAvl signals in a list, called the “Look-Up” list. This list is mainly used to select or look for the current or the next available-CNode during the cooperation process. Prior to the cooperation process, the destination applies a predefined selection criterion to sort the list in a particular order. For this purpose, the CAvl signal can be designed to contain multiple fields for holding information related to the available-CNodes, such as, distance from destination, remaining level of energy, channel conditions etc.
An empty Look-Up list indicates that none of the CNodes have successfully overheard Pac-0 and the process goes into Phase 4, skipping the cooperation process (Phase 3), by transmitting a NACK. The source then starts again from Phase 1 by retransmitting Pac-0 to the destination. Otherwise, if even a single CNode is available, the cooperation process is deployed as follows:
Cooperation Process
The first step of the process is to select a CNode from the Look-Up list, for the destination to contact first. The simplest criteria would be to select them on the basis of their closeness to the destination, which can be realized by allowing the CAvl signal to contain certain timestamp information which the destination can use to calculate the round-trip delay between itself and that CNode. The CNode with the least round-trip delay can be chosen to be the best one. However, if this option is not available, a simple First-Come-First-Serve (FCFS) selection procedure can be used, where the CNodes are selected in the order of their CAvl arrival. The former is assumed to be the selection criteria for our analysis.
Next, the process of contacting a CNode basically involves transmission of a NACKj to the i th available-CNode (CNode-i), asking for the FEC packet Pac-j. Following this mechanism the destination sends a NACK-1 to the closest CNode, which can be referred to as CNode-1. Upon receiving NACK-1, CNode-1 transmits Pac-1 to the destination. Destination saves the received Pac-1 as saved_Pac-1 then checks for errors in it by computing its own CRC. Here, the destination needs to maintain a special “status” vector so as to keep track of the status of the saved FEC packets; where, status=1 means the received FEC packet is error-free and doesn't require any retransmission, while status=0 means the saved_Pac-1 has some errors, and thus may require retransmission. Then, the destination tries to recover the original data by combining the saved_Pac-0 and saved_Pac-1 and then feeding it to the Viterbi decoder [17]. If the recovery is successful, an ACK is sent to the source and the cooperation process terminates, otherwise, NACK-2 is sent to CNode-1 for the next FEC packet, Pac-2. On receiving Pac-2, destination saves it as saved_Pac-2 with its status set accordingly, and then utilizes it in the next Viterbi decoding attempt along with the previously saved packets. This process of FEC packet reception and Viterbi decoding continues in association with CNode-1 till the original data gets recovered or the transmission of the last FEC packet (Pac-Nmx) from CNode-1 gets completed. In case the later happens and the error still persists, it is because of the either of the two possible cases: (1) none or only few of the total required correct FEC packets (error-free versions) are available, thus unable to fully utilize the error correction capability or (2) all the saved-FEC packets are correct but the count of errors in saved_Pac-0 is beyond the error correction capability of the convolution code. In the first case, the destination approaches the next closest available-CNode, CNode-2, for further cooperation, where, before sending a NACK, destination first checks the status vector to identify all the incorrect FEC packets and sets the value of the NACK accordingly. For example, if retransmission of Pac-j is required, the value of NACK is set to “j”. On reception of NACKj, CNode-2 finds the Pac-j from its buffer and transmits it to the destination. Destination overwrites the saved_Pac-j with the freshly received Pac-j; performs error detection and accordingly updates its status. As usual, a Viterbi decoding is carried out using all the packets saved in the buffer including the new one. A successful recovery results in termination of the cooperation by sending an ACK to the source, otherwise, the attempts of error correction continues for other FEC packets and with other available-CNodes.
The second case, where all the FEC packets have been correctly saved (i.e., status = 1 for all FEC packets), implies that no more cooperation is required. Thus to terminate the current cooperation process, and to ask the source for a new copy of Pac-0 (so as to replace the saved_Pac-0), a NACK is sent to the source. Upon receiving the NACK, the source comes out of the idle mode and transmits a fresh copy of Pac-0, which is then utilized by the destination in the following error correction attempt. If the error correction fails again, a NACK is sent to the source again. Here, the destination requests for no further cooperation as all the FEC packets are already available. Now, the destination and the source continue to work in this S&W ARQ manner, with the error correction information available at the destination, until the data is successfully recovered.
In another special case where the last available-CNode has been contacted but some of the saved FEC packets still require retransmission, a NACK is sent to the source, so as to eventually start the next cooperation process for acquiring the remaining FEC packets. On hearing the NACK, source simply retransmits Pac-0, with which the destination first attempts Viterbi decoding utilizing the previously saved FEC packets; if the data is recovered successfully an ACK is sent, otherwise the next cooperation process is initialized from the stage of CReq transmission so as to obtain the remaining FEC packets.
4. Performance Analysis
In this section we define the expressions of the performance metrics, i.e., throughput efficiency and energy efficiency, which is used to analyse the performance of the C-HARQ protocol against the CARQ and S&W ARQ protocols.
4.1. Throughput Efficiency
The throughput efficiency of an error control scheme is defined as the ratio of the transmission time of the data packet to the total time taken in successfully delivering the packet. The throughput efficiency of our system is thus expressed as:
4.2. Energy Efficiency
Before defining the energy efficiency metric for the cooperative protocols, we consider the simple case of single hop S&W ARQ communication between the source and the destination. The total energy consumed in the network for a single attempt of data packet delivery by source (that results in an ACK or NACK response from the destination) is given by:
Using the same methodology as S&W ARQ, the energy consumption for both CARQ and C-HARQ are obtained next; where, we present the energy consumption model, employed during the computer simulation of the cooperative protocols, by expressing the energy efficiency equations for a very simple example case that considers a major assumption. It is to be noted that the computer simulations are fully fair, without any of the assumptions; whereas the example case is considered, in the following part, only to give an insight into the energy consumption model.
4.2.1. Cooperative ARQ
The cooperative ARQ protocol considered in this paper, for comparison with C-HARQ, is basically the same as the previous one [3], but with the addition of CNode discovery process using CAvl and CReq signals; whereas previously it was assumed that the destination has a prior knowledge of all the CNodes. Rest of the process of one-by-one cooperation of CNodes starting from the closest CNode first, is same.
For the example case, let the source transmit a data packet sTx times in total, invoking a total of sTx cooperation processes, until the data packet is successfully delivered to the destination; during the final, sTx-th, cooperation process, f numbers of CNodes are contacted before the success. The cooperative region contains a maximum nCN number of potential CNodes, and the main assumption here is that all of them become available in the very first cooperation process. Then, the total energy consumption of the entire CARQ process can be calculated as the sum of the energies consumed at every node, which can be expressed as:
In the illustration of Equation (6), the destination receives the data packet r times from the source, (r − 1) nCNA and p times from the CNodes, through first r − 1 cooperation processes and the final cooperation process respectively. Destination transmits r − 1 number of NACKs (NACK-to-Source) in response to the first r − 1 unsuccessful attempts and an ACK for the successful, r-th, one. Further, (r – 1) nCNA + p numbers of NACKCN (NACK-to-CNodes) are sent by the destination to CNodes, during the entire cooperation process, to ask for data packet retransmission. Here, NACKS and NACKCN are basically the same negative acknowledgement signal, but used only to differentiate between a NACK sent to ask the source to transmit and a NACK sent to ask a CNode to transmit, respectively. Next, considering the fact that destination lacks prior knowledge of the total number of potential CNodes in the cooperative region, it initiates every cooperation attempt with the CNode discovery process (through the broadcast of CReq signal), even when in actual all the CNodes have become available; hence, a total of r CReq signals are transmitted by the destination. Further, during the computer simulation, the CAvl signal has been considered immune to errors thus making it sufficient for an available CNode to send the CAvl signal only once to the destination, even if it keeps hearing CReq signals thereafter; hence the destination receives a total of nCNA number of CAvl signals during the entire process. To reduce the time overhead caused due to this repetitive CNode discovery process even when not required, we present in the result section a maximum limit that can be set to the number of discovery attempts, particularly for the C-HARQ protocol, after which the destination directly goes into the cooperation, skipping the CNode discovery process. Next, the energy consumption at the source node can be similarly expressed as:
The source node not only receives NACKS and ACK signals meant for it but also overhears the NACKCN, CReq and CAvl signals that are exchanged between the destination and the CNodes; hence the energy consumption resulting from them is also included in Equation (8). The overhearing of these signals keeps the source informed about the ongoing cooperation activity. The data packet transmitted by a CNode to the destination can also be overheard by the source and rest of the CNodes, however it has been assumed that a node can know whether a packet is meant for it or not by processing only the initial few bits (i.e., header part), and hence can immediately stop or continue receiving the rest of the packet. Especially for larger packets (i.e., data and FEC packets), decoding of the packet header can be completed much before the antenna receives the rest part of the packet, as the processing takes very less time compared to the reception time. Employing this mechanism the overhearing of a CNode's data packet (for CARQ) and FEC packet (for C-HARQ), by source and other CNodes, has been avoided during the computer simulations.
The total energy consumption of the cooperative nodes is calculated as the sum of the energies consumed by the individual cooperative nodes, which can be expressed as:
The CNodes overhear the NACKS and ACK signals transmitted by the destination, so as to keep track of the current status of the protocol, and decide whether to retain or drop the source's overheard data packet from its packet buffer. Additionally, it can also overhear the NACKCN signals transmitted to other CNodes, along with the NACKCN signals meant for it. However, as mentioned earlier, a CNode avoids the overhearing of any other CNode's data packet as it already has a copy of it.
Finally, we define the energy efficiency as the ratio of the useful energy consumed in transmitting the data packet to the total energy consumed in successfully delivering that packet. Hence, the energy efficiency of CARQ can be expressed as:
4.2.2. Cooperative-HARQ
Again considering the same case of sTx times data packet (here Pac-0) transmissions from source, invoking a total of sTx cooperation processes, for the successful recovery of data at the destination, the total energy consumption of the C-HARQ protocol is given by:
At the destination, the total energy consumption can be expressed as:
Since the basic cooperation mechanism is same for C-HARQ, the NACKS, ACK, CReq and CAvl terms in Equation (12) are same as that in Equation (6). But, with data packets coming only from the source, the destination receives the copies only r times and every time a Viterbi decoding is attempted using the previously saved FEC packets, except the very first transmission; thus resulting in the second term in Equation (12), where, lDATA is the data payload size of Pac-0 and Edec represents the energy consumed per useful bit (data bit) in a Viterbi decoding attempt. Nmx is the total number of FEC packets generated by RCPC encoding and nij represents the number of times the destination had to ask the i-th CNode to transmit Pac-j before successfully receiving and storing it. In other words, nij represents the total number of transmissions of Pac-j from the i-th CNode during the entire process; and every FEC packet reception is accompanied by a Viterbi decoding attempt.
The source in C-HARQ is not involved in any FEC encoding or decoding process hence the working of the source is the same as that in CARQ; the only difference is the number of NACK to CNodes overheard. Again, the overhearing of a CNode's FEC packet has been avoided for source as well as other CNodes. Thus, the energy consumption at the source node is given by:
Similarly at the cooperative nodes, the total energy consumption is given by:
A CNode listens to all the NACK signals but responds only to the ones meant for it. Finally, from Equations (4a) and (13), the energy efficiency of C-HARQ can be written as:
Theoretical calculation of nij, Pr(f = p | sTx = r), Pr(sTx = r) and TCO-OP are beyond the scope of this paper, hence computer simulations are used instead.
5. Simulation Model and Results
In this section we present the numerical results obtained from computer simulations of C-HARQ protocol for the underwater sensor network depicted in Figure 1. The entire system is modelled in a Matlab environment, where extensive Monte Carlo simulations are performed to numerically measure the performance of a protocol. The averaged values of the performance metrics obtained for C-HARQ are compared with those of CARQ and standard S&W ARQ under common network conditions. Further, the performance metrics are used to find the optimum values of the network parameters so as to optimize the overall performance.
For convolution encoding, the constraint length (K) of the systematic encoder is set to 5. The generator polynomial pair {37 33} is used, “37” (octal representation) being the feedback polynomial, which delivers a code rate of 1/2. At the destination a hard decision Viterbi decoder, operating in ‘trunc’ mode, with a trace-back length set equal to 5K, is used for decoding the convolution codewords along with their punctured derivatives. Out of the three operating modes of Viterbi decoder in Matlab, i.e., “cont”, “term” and “trunc”, trunc mode is used because it incurs no delay before the appearance of first symbol at the output [16]. In general, the energy requirement of convolution encoding process is considered negligible [18,19], however the process of Viterbi decoding is quite energy-intensive. Assuming a StrongARM microprocessor (SA-1110) to be the on-board processing unit, the average energy required per useful bit (Edec) to decode a punctured convolution code (code rate = 1/2, K = 5) using a Viterbi decoder, has been experimentally found to be approximately 0.02 mJ [19]. The encoding and decoding energies of CRC are neglected.
The underwater acoustic channel for data transmission is basically modelled in Matlab by a binary symmetric channel (BSC), whose bit error probability value is taken from the “average BER vs. inter-nodal distance” graph obtained in previous woks on CARQ in UASNs [3]. The average BER is obtained for binary phase shift keying (BPSK) modulation under Rayleigh channel fading, where the signal-to-noise ratio (SNR) is primarily affected by frequency and distance dependence attenuation, and ambient noise modelled by turbulence, shipping, waves and thermal noise. For the source-to-destination link of length 1,000 m the average BER is found to be around 2.5 × 10−3; for the cooperative links varying from 100 m to 1,000 m the BER is found to vary in the range of 2 × 10−5 to 2.5 × 10−3. For the sensor nodes, the on-board acoustic modem is considered to be the LinkQuest UWM2000 acoustic modem [2]. The relevant specifications of the modem, along with some network parameter values, are given in Table 1.
The main assumptions or relaxations taken into account for the simulation purpose are:
Control signals and Header/Trailer part of a packet are immune from errors.
Collision-free transmission of CAvl signals.
No limit to source's retransmission attempts.
100% error detection capability of CRC.
Negligible processing time compared to the long propagation delays.
To be able to apply the performance results of this protocol to any general network configuration, and not to any fixed network topology, the location of the CNodes are changed at the beginning of every simulation run, by randomly redistributing them in the cooperative region; the source and destination remain fixed at their positions. Further, to obtain averaged and confident values, the simulations are executed over enough number of runs (100–150), with each run delivering 1,000–1,500 data packets from source to destination, so that the final performance metrics plots are definite and smooth. Moreover, to validate the accuracy and precision of the obtained results 95% confidence interval is also shown, but only in one plot (Figure 5) due to lack of space in other figures. Nonetheless, the confidence level of the 95% confidence interval applies to each and every plot. Finally, the obtained results and their discussions are as follows.
5.1. Optimum Data Payload Size
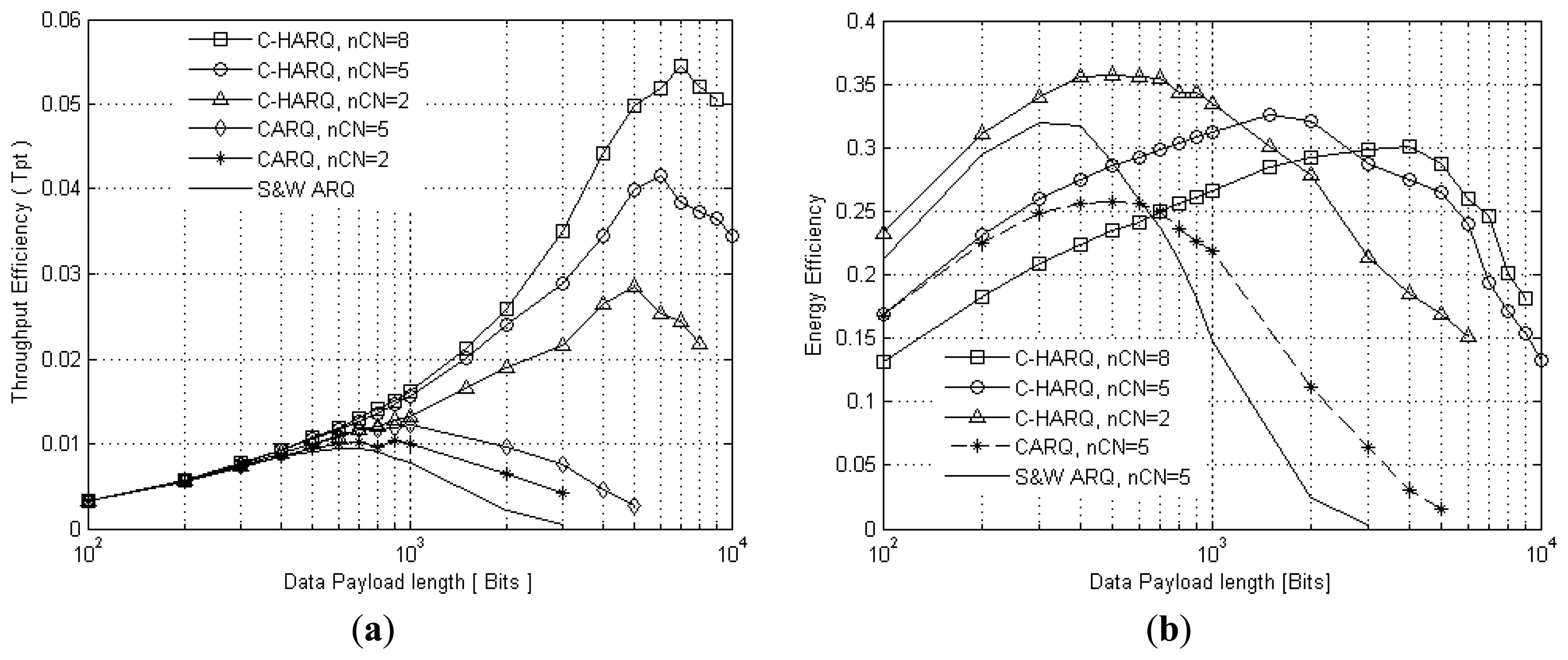
Figure 4a presents the throughput efficiency as a function of data payload size for the C-HARQ, CARQ, and standard S&W ARQ protocols. It clearly shows that the error correction capabilities of C-HARQ boost the throughput efficiency of CARQ to a much higher level, thus outperforming both CARQ and S&W ARQ by a big margin. Further, considering a wide range of applications of the sensor networks resulting in variation in the number of neighbour nodes, and to estimate an overall average value of the optimum data payload size, the throughput efficiency of C-HARQ is plotted for nCN = 2, 5 and 8. The payload size which achieves the maximum throughput efficiency is found to be in the range of 5,000–7,000 bits for nCN = 2 to 8. Thus, for further analysis of C-HARQ we set the optimum payload size to 6,000 bits, which is far greater than that of CARQ (1,000 bits) and S&W ARQ (600 bits); this allows more amounts of data transfer on a single successful attempt.
From the point of view of energy, the three protocols are first tested with the number of neighbour nodes set to 5; their energy efficiency is plotted in Figure 4b. Additionally, the energy efficiency of C-HARQ for nCN = 2 and 8 is also presented. The plot reveals that C-HARQ outperforms the simple CARQ protocol over the entire range of payload length. When compared to S&W ARQ, C-HARQ delivers more energy efficiency especially for larger data payloads (≥600 bits), but for smaller payloads (≤500 bits) S&W ARQ is found to be more energy conserving than the cooperative protocols, the reason being the additional energy consumption of the CNodes due to their inherent property of listening to the original data transmission even when not required, which is the case with smaller payloads where the packet error rate (PER) is low. In case of conventional S&W ARQ, it has been assumed that the CNodes know about the on-going communication and hence remain in idle mode for the entire duration, adding only the idle mode energy expenditure to the total consumption.
Further, C-HARQ with nCN = 2 proves to have better energy efficiency than nCN = 5 and 8, for payload of smaller size but for larger payload size nCN = 5 and 8 have the better efficiency. This is again because of the additional energy consumption of the CNodes in overhearing the original transmission when their cooperation is not required. Whereas, for larger payload size the PER is high and CNodes are required to play their role in improving the performance, thus overshadowing their overhearing energy expenditure. From the aspect of energy efficiency, it is difficult to assign a common optimum payload size for C-HARQ for all types of network configurations, as the optimum size is found to vary in the range of 600 bits (nCN = 2) to 4,000 bits (nCN = 8). Thus we use the optimum payload setting obtained from throughput efficiency analysis.
5.2. Optimum Number of FEC Packets, Nmx
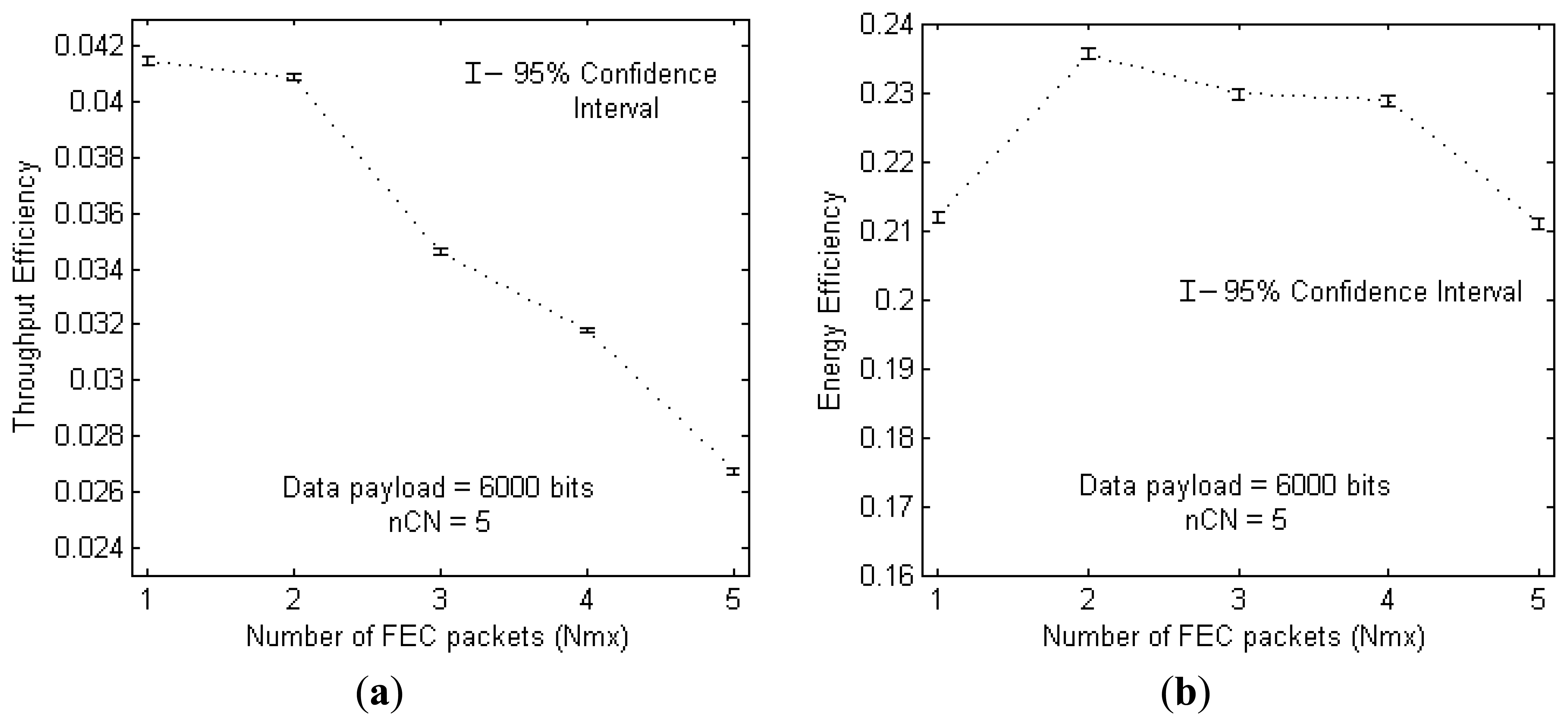
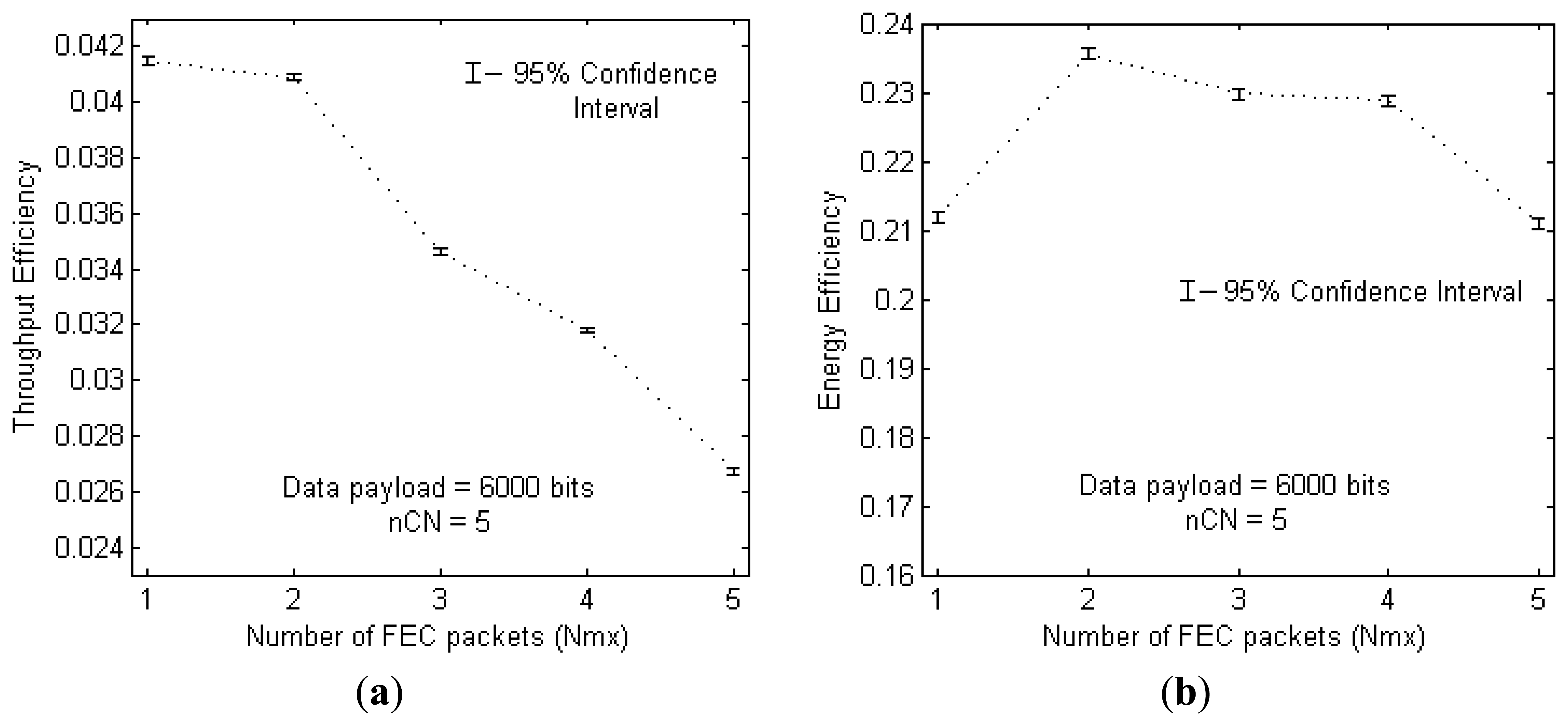
The effect of splitting the FEC part, into multiple FEC packets, on throughput efficiency and energy efficiency is shown in Figure 5a,b, respectively. For this analysis, the above achieved optimum payload size is used in a region with 5 CNodes distributed randomly at each run.
From Figure 5a, it is clear that throughput efficiency decreases as Nmx is increased above 2. This is mainly because with more FEC fragments the total amount of time taken to transfer the required amount of FEC information to the destination increases; due to the accumulation of long propagation delays associated with each NACK and FEC packet transmission. The best throughputs are achieved at the values of Nmx = 1 and 2, with Nmx = 1 providing slightly better value. Thus it is clear that in the presence of long propagation delays it is better to transmit the FEC information in only one or two FEC packets than dividing it into many.
On the other hand, in terms of energy efficiency, the transmission of many smaller FEC packets does not rapidly degrade the performance (from Figure 5b). Transmission of smaller FEC packets, one-by-one, allow only up to the required amount of FEC information being sent to the destination, thus preventing the energy consumption from transmission of extra FEC bits. However, more number of FEC packets increases the total number of Viterbi decoding attempts, which take place every time a new packet is received, thus adding to the overall energy consumption. Because of these two opposing factors the energy efficiency does not show much deviation with an increase in Nmx. However at Nmx = 3 and Nmx = 4, slight irregularities are, most probably, because of the puncturing patterns used during the simulations, but they are irrelevant to this analysis. The puncturing patterns used for generating FEC packets are shown in Table 2. The convolution code with the patterns used at Nmx = 4 seems to perform equally better as that at Nmx = 3, especially in terms of energy efficiency.
The 95% confidence interval shown at any point in Figure 5, let's say Nmx = 1, is obtained over a total of 100 runs each delivering 1,000 packets. The average value of the throughput efficiency, obtained over 100 × 1,000 values, is found to be 0.0415 with a standard deviation of 0.0268. Then using the general principle of 95% confidence interval calculation, the one-sided interval can be approximated to 0.0002, thus resulting in the lower and upper 95% confidence levels of 0.0413 and 0.0417, respectively. Though not shown in other plots, the same confidence level applies for all other figures with number of runs varying from 100 to 150, and number of data packets varying from 1,000 to 1,500. Finally, utilising the results in Figure 5a and 5b simultaneously, we choose Nmx = 2 to be the optimum value for number of FEC packets, whose energy efficiency is better than that of Nmx = 1, with negligible difference in their throughput efficiencies.
5.3. Maximum Achievable Throughput Efficiency
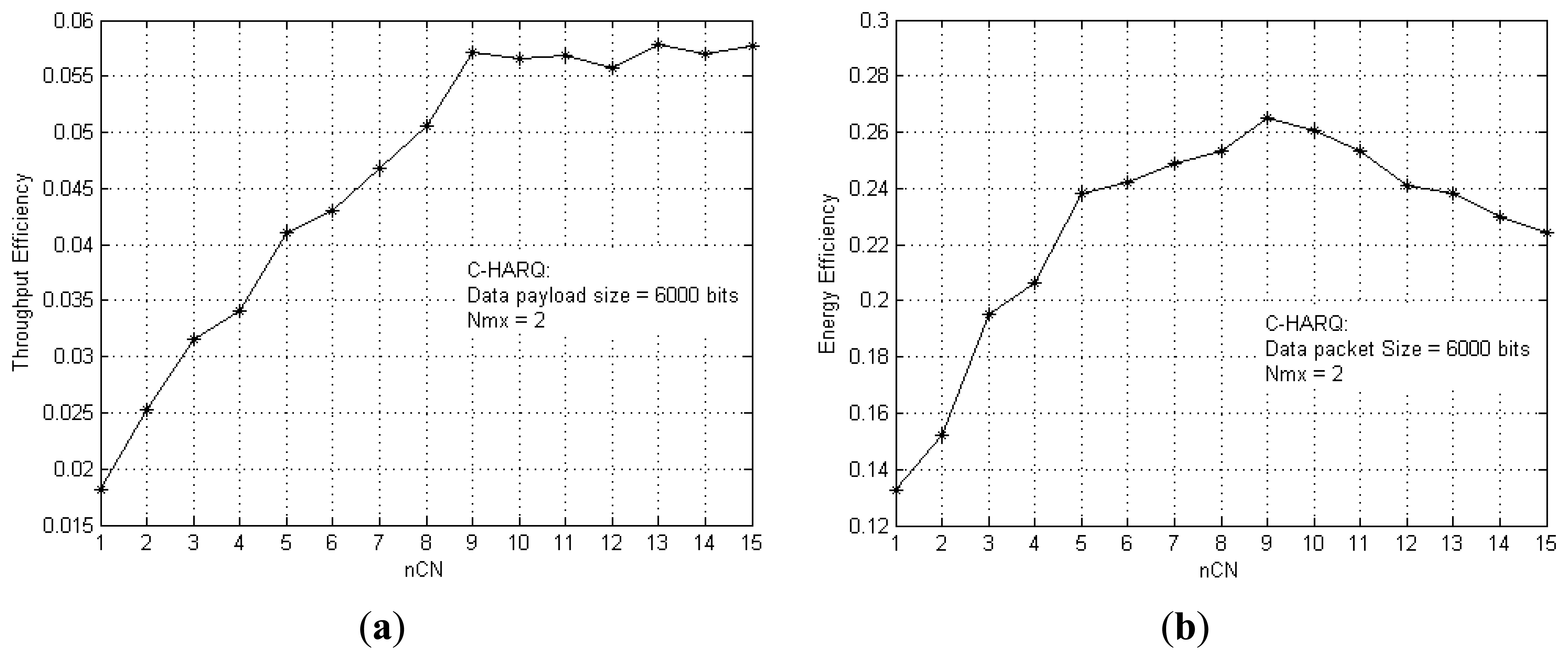
The improvement in throughput efficiency and energy efficiency due to an increase in the number of CNodes is shown in Figure 6a,b, respectively. More number of CNodes increases the probability of successfully delivering all the FEC packets to the destination, thus improving the performance. Figure 6a gives an idea of the minimum number of CNodes required to achieve the maximum achievable throughput efficiency, i.e., nCN = 9. For nCN > 9, the extra CNodes are unable to enhance the throughput efficiency further. Rather, they decrease the energy efficiency by adding to the overall energy consumption of the network, as clearly depicted in Figure 6b. For very dense networks, these results can be utilised to set the limit for the Look-Up list length, defined earlier, so that once the optimum number of CNodes become available the CNode discovery process is skipped to directly go into cooperation, thus avoiding time and energy wastage.
5.4. Energy Consumption at Various Nodes
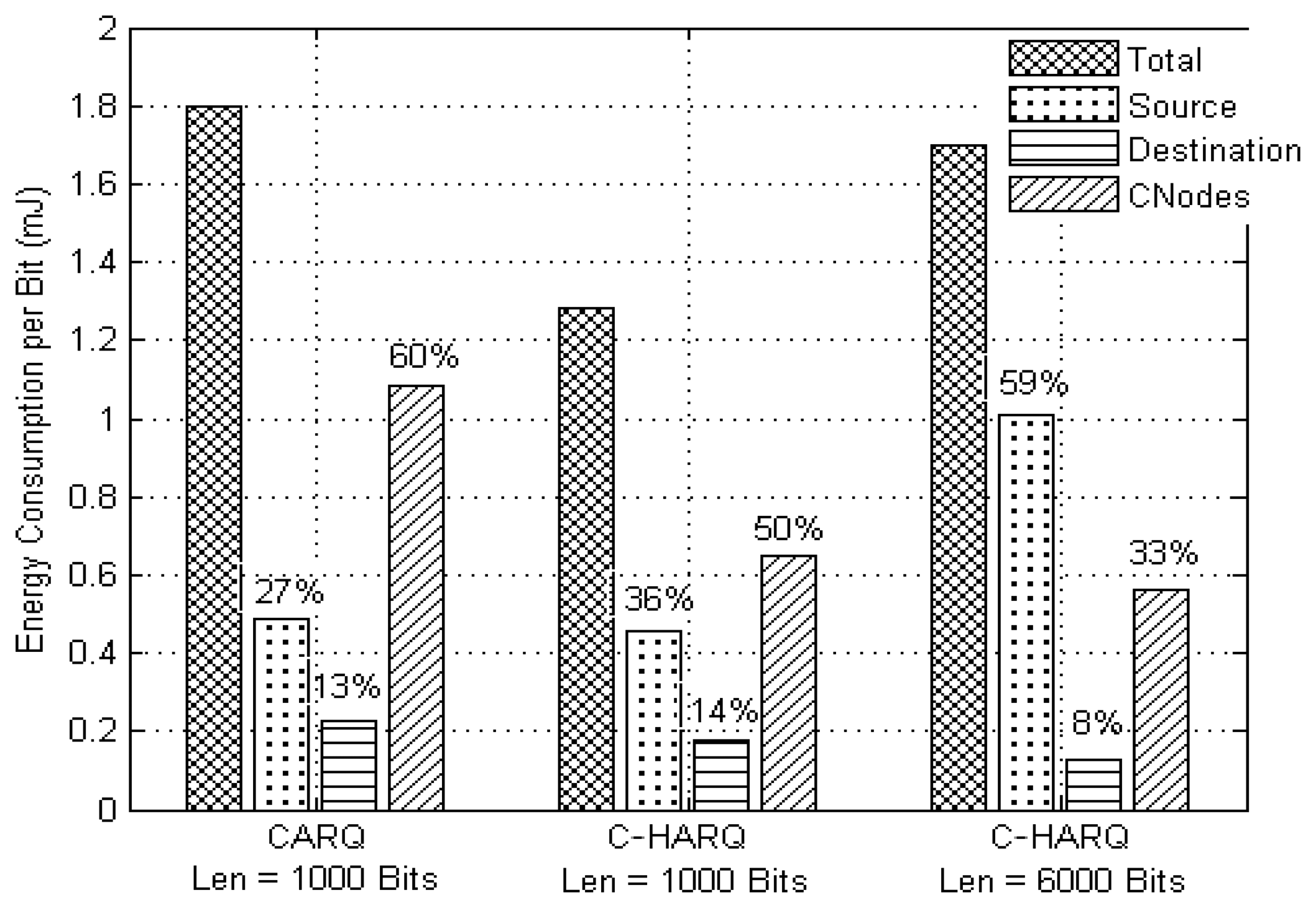
In case of conventional S&W ARQ, it is obvious that most of the energy is consumed by the source node, compared to destination and CNodes (as PTx > PRx ≫ PIdle). In a long run, this method can quickly discharge a sensor node which is active most of the time, collecting and transferring data to a base station. In this regard, the cooperative protocols have the inherent advantage of distributing the energy consumption across the network by temporarily transferring the source's burden to the CNodes, thus allowing the source to conserve energy for future use. However, this approach of temporarily transferring the burden to CNodes by asking them to share their energy resources may cause a CNode to lose a significant amount of energy, thus affecting its own applications. The C-HARQ proves to be very efficient in this aspect as it asks the CNodes to carry the burden of delivering only the smaller FEC fragments while maintaining the source responsible for transmission of larger data packets. To illustrate this better, Figure 7 presents the energy consumption distribution in the network for CARQ and C-HARQ protocols, operating at their optimum settings. It gives an estimate of the average energy consumed per data bit by different nodes in successfully delivering the data from source to destination. The percentage value shown for a node denotes its percentage contribution to the total energy consumption. For the case of CNodes, the combined total energy consumption of all the CNodes is plotted (nCN = 5 in this case).
For the CARQ protocol, operating at its optimum throughput setting (i.e., at payload length of 1,000 bits), the total energy consumed per data bit by all the CNodes is found to be greater than twice the energy consumed by the source; indicating that an individual CNode lose quite a significant amount of energy in providing cooperation or delivering other's data. On the other hand, C-HARQ (at 1,000 bits) not only consumes less energy but also reduces the burden of the CNodes by transferring some of the burden back to the source. When operating at its optimum payload length (6,000 bits), C-HARQ not only delivers a throughput efficiency of approximately four times the optimum throughput efficiency of CARQ (Figure 4a), at the expense of same or rather slightly less energy per bit, but also maintains the source responsible for major part of the energy consumption (by further transferring back the burden of CNodes to source). Thus, it can be said that C-HARQ provides an optimum performance between S&W ARQ and CARQ in terms of energy distribution. In other words, the use of error correction codes in C-HARQ helps a cooperative protocol to enhance its throughput while using the CNodes to deliver only the smaller FEC packets decreases the energy sharing burden of CNodes.
5.5. Performance at Varying Bit Error Rate (BER)
We first select a random network configuration by randomly distributing five cooperative nodes in the cooperative region, whose topography is shown in Figure 8.
The same as earlier, the BER of all the links in the network are obtained from the “average BER vs. the inter-nodal distance” graph [3]. Let's denote these obtained BER values of Source-to-Destination (S-D) link, CNode-to-Destination (CN-D) link and Source-to-CNode (S-CN) link with ber_S-D, ber_CN(i)-D and ber_S-CN(i), respectively, where i ∈ {1,2,…nCN}These BER values are found to be of the order of 10−3. Now, to see the effect of BER variation of a particular link on the performance of C-HARQ, while the other links maintain their original BER values, we use a multiplication factor α such that it is multiplied to the original BER value of that particular link and varied over the required range. For example, the BER of the Source-to-Destination link can be varied, by varying the value of α in the relation: BER_S-D = α × ber_S-D.
5.5.1. C-HARQ versus BER of Individual Links
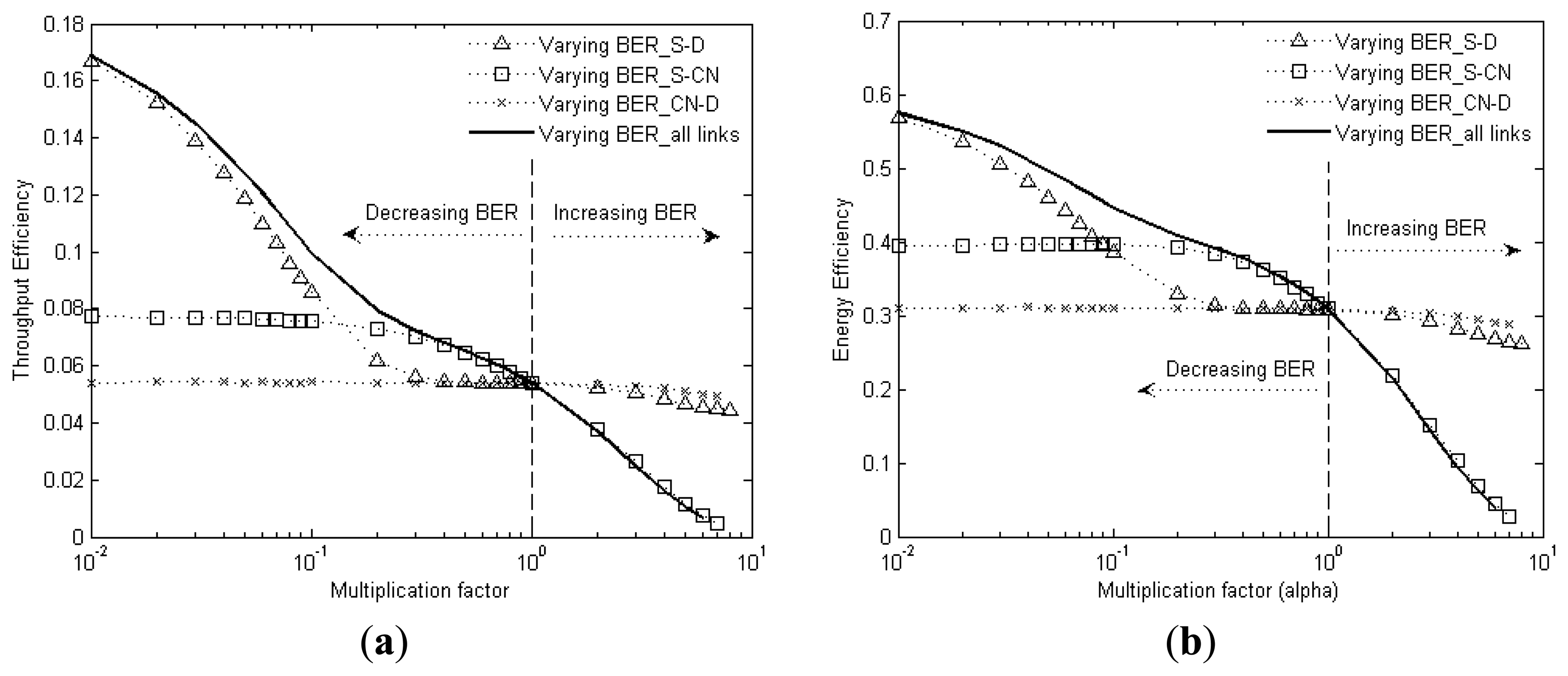
Figure 9 shows the impact of BER variations of individual links on the throughput efficiency and energy efficiency. The BER of a link is individually varied by varying the value of α over the range shown in figure, while the others are kept constant at their original BER values. Additionally, the impact of an overall BER variation in the network is also obtained by multiplying α to all the links simultaneously.
The results reveal that the performance of C-HARQ depends mainly on the link conditions of S-D and S-CN channels. A decrease in BER_S-D causes a rapid performance improvement, however an increase in BER does not degrade the performance rapidly because of the error correction gains provided by convolution coding. The degradation in performance is mainly caused by the increase in BER_S-CN as these channels determine the availability of CNodes which can provide the required error correction information. Lastly, the CN-D link does not have any major impact because it is involved in only transferring the smaller FEC packets. Hence, it can be easily inferred that the performance of C-HARQ mainly depends on the links that are involved in transferring the data packet.
5.5.2. C-HARQ, CARQ and S&W ARQ against BER of All Links
Figure 10a,b presents the throughput efficiency and energy efficiency comparison, respectively, against the BER variations of all the links at the same time.
Figure 10a clearly shows that C-HARQ outperforms CARQ and S&W, over the entire range of BER. However Figure 10b reveals that C-HARQ provides the best energy efficiency performance only at high BER, but at lower BER, S&W ARQ proves to be more energy efficient than the cooperative protocols. This is quite understandable, as under good channel conditions the cooperation process is not required so much and the cooperative protocols basically starts operating in S&W mode, but with the additional energy expenditure from CNodes due to overhearing of the original transmission. With five CNodes and ten times larger optimum payload size (compared to that of SW ARQ), these energy consumption becomes non negligible for C-HARQ and hence contributes to the degradation of the energy efficiency level.
6. Conclusions
Exploiting the efficiency of cooperative communication and the incremental error correction capabilities of the RCPC codes, an enhanced version of cooperative ARQ protocol is proposed in this paper for underwater acoustic sensor networks. This protocol efficiently merges the two ARQ schemes: Type-II HARQ and CARQ, so as to utilise the benefits of both the techniques. Computer simulations were done to show the enhanced performance of this hybrid cooperation technique by comparing its performance against the present Cooperative ARQ and standard S&W ARQ. The results show that not only is the throughput efficiency boosted to a much higher value, but the energy efficiency is also improved. Further, the optimum values of various network parameters were also estimated to extract the best performance from the proposed protocol. Using this basic framework of the C-HARQ protocol, more powerful rate compatible codes (e.g., rate compatible punctured turbo (RCPT) codes) can be employed to further improve the performance.
Acknowledgments
This work was supported in part by the Defense Acquisition Program Administration and Agency for Defense Development under the contract UD130007DD and in part by Basic Science Research Program through the National Research Foundation of Korea funded by the Ministry of Education, Science and Technology (NRF-2012R1A1A4A01).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Freitag, L.; Grund, M.; Singh, S.; Partan, J.; Koshki, P.; Ball, K. The WHOI Micro-Modem: An Acoustic Communications and Navigation System for Multiple Platforms. Proceedings of 2005 IEEE Ocean Conference, Washington, DC, USA, 18–23 September 2005.
- LinkQuest Inc. Linkquest Underwater Acoustic Modem UWM2000 Specifications. Available online: http://www.link-quest.com/html/models1.htm (accessed on 25 May 2013).
- Lee, J.W.; Cheon, J.Y.; Cho, H.S. A Cooperative ARQ Scheme in Underwater Acoustic Sensor Networks. Proceedings of 2010 IEEE Oceans Conference, Sydney, Australia, 20–23 September 2010.
- Vajapeyam, M.; Vedantam, S.; Mitra, S.; Presig, J.; Stojanovic, M. Distributed space-time cooperative schemes for underwater acoustic communications. IEEE J. Oceanic Eng. 2008, 33, 489–501. [Google Scholar]
- Cao, R.; Yang, L. On the Capacity and System Design of Relay-Aided Underwater Acoustic Communications. Proceedings of Wireless Communications and Networking Conference, Sydney, Australia, 18‒21 April 2010.
- Stojanovic, M. Capacity of a Relay Acoustic Link. Proceedings of 2007 IEEE Oceans Conference, Vancouver, BC, Canada, 29 September–4 October 2007.
- Han, Z.; Sun, Y.L.; Shi, H. Cooperative Transmission for Underwater Acoustic Communications. Proceedings of IEEE International Conference on Communications (ICC 2008), Beijing, China, 19–23 May 2008; pp. 2028–2032.
- Liu, P.; Tao, Z.; Lin, Z.; Erkip, E.; Panwar, S. Cooperative wireless communications: A cross- layer approach. IEEE Commun. Mag. 2006, 13, 84–92. [Google Scholar]
- Tacca, M.; Monti, P.; Fumagalli, A. Cooperative and reliable ARQ protocols for energy harvesting wireless sensor nodes. IEEE Trans. Wirel. Commun. 2007, 6, 2519–2529. [Google Scholar]
- Park, I.; Lee, H.; Taekon, K. The Performance analysis of Hybrid ARQ-II for Cooperative Communication over Wireless Channels. Proceedings of IEEE International Conference on Sensor Networks, Ubiquitous, and Trustworthy Computing (SUTC 2010), Newport Beach, CA, USA, 7–9 June 2010.
- Harsini, J.S.; Lahouti, F.; Levorato, M.; Zorzi, M. Analysis of non-cooperative and cooperative type II hybrid ARQ protocols with AMC over correlated fading channels. IEEE Trans. Wirel. Commun. 2011, 10, 877–889. [Google Scholar]
- Ngo, H.A.; Nguyen, T.D.; Hanzo, L. HARQ Aided Systematic LT Coding for Amplify-Forward and Decode-Forward Cooperation. Proceedings of IEEE 71st Vehicular Technology Conference (VTC 2010-Spring), Taipei, Taiwan, 16–19 May 2010.
- Xie, P.; Cui, J.H. An FEC-Based Reliable Data Transport Protocol for Underwater Sensor Networks. Proceedings of 16th International Conference Computer Communications and Networks (ICCC 2007), Honolulu, HI, USA, 13–16 August 2007; pp. 747–753.
- Cao, R.; Yang, L. Reliable Relay-Aided Underwater Acoustic Communications with Hybrid DLT Codes. Proceedings of Military Communications Conference (MILCOM 2011), Baltimore, MD, USA, 7–10 November 2011; pp. 412–417.
- Hagenauer, J. Rate-compatible punctured convolutional codes (RCPC codes) and their applications. IEEE Trans. Commun. 1988, 36, 389–400. [Google Scholar]
- Convolution Coding\Implementing A Systematic Encoder with Feedback; version 7.11.0 (R2010b); MATLAB help-documentation; The MathWorks: Natick, MA, USA, 2010.
- Viterbi, A.J. Error bounds for convolutional codes and an asymptotically optimum decoding algorithm. IEEE Trans. Inf. Theory 1967, 13, 260–269. [Google Scholar]
- Sankarasubramaniam, Y.; Akyildiz, I.F.; McLaughlin, S.W. Energy Efficiency Based Packet Size Optimization in Wireless Sensor Networks. Proceedings of IEEE International Workshop on Sensor Network Protocols and Applications (SNPA 2003), Anchorage, AK, USA, 11 May 2003; pp. 1–8.
- Shih, E.; Cho, S.; Ickes, N.; Min, R.; Sinha, A.; Wang, A.; Chandrakasan, A. Physical Layer Driven Protocol and Algorithm Design for Energy-Efficient Wireless Sensor Networks. Proceedings of ACM 7th Annual International Conference on Mobile Computing and Networking (MobiCom 2001), Rome, Italy, 16–21 July 2001; pp. 272–286.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PARAMETER | VALUE |
|---|---|
| Source-Destination distance | 1,000 m |
| Sound Speed | 1,500 m/s |
| ACK/NACK packet size | 7 Bytes |
| CReq/CAvl packet size | 7 Bytes |
| Data rate | 20 kbps |
| Operating frequency | 25 kHz |
| Transmission power (PTx) | 8 W |
| Reception power (PRx) | 0.8 W |
| Idle mode power (PIdle) | 8 mW |
| Decoding energy per useful bit (Edec) | 0.02 mJ |
| No. of FEC Packets | FEC Packet | Puncturing Pattern Used for Generating the Related FEC Packet |
|---|---|---|
| Nmx = 0 | Pac-0 | 10101010101010101010 |
| Nmx = 1 | Pac-1 | 01010101010101010101 |
| Nmx = 2 | Pac-1 | 01000100010001000100 |
| Pac-2 | 00010001000100010001 | |
| Nmx = 3 | Pac-1 | 01000001000001000001 |
| Pac-2 | 00010000010000010000 | |
| Pac-3 | 00000100000100000100 | |
| Nmx = 4 | Pac-1 | 01000000010000000100 |
| Pac-2 | 00010000000100000001 | |
| Pac-3 | 00000100000001000000 | |
| Pac-4 | 00000001000000010000 | |
| Nmx = 5 | Pac-1 | 01000000000100000000 |
| Pac-2 | 00010000000001000000 | |
| Pac-3 | 00000100000000010000 | |
| Pac-4 | 00000001000000000100 | |
| Pac-5 | 00000000010000000001 | |
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Ghosh, A.; Lee, J.-W.; Cho, H.-S. Throughput and Energy Efficiency of a Cooperative Hybrid ARQ Protocol for Underwater Acoustic Sensor Networks. Sensors 2013, 13, 15385-15408. https://doi.org/10.3390/s131115385
Ghosh A, Lee J-W, Cho H-S. Throughput and Energy Efficiency of a Cooperative Hybrid ARQ Protocol for Underwater Acoustic Sensor Networks. Sensors. 2013; 13(11):15385-15408. https://doi.org/10.3390/s131115385
Chicago/Turabian StyleGhosh, Arindam, Jae-Won Lee, and Ho-Shin Cho. 2013. "Throughput and Energy Efficiency of a Cooperative Hybrid ARQ Protocol for Underwater Acoustic Sensor Networks" Sensors 13, no. 11: 15385-15408. https://doi.org/10.3390/s131115385