Application of Collocated GPS and Seismic Sensors to Earthquake Monitoring and Early Warning

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
: We explore the use of collocated GPS and seismic sensors for earthquake monitoring and early warning. The GPS and seismic data collected during the 2011 Tohoku-Oki (Japan) and the 2010 El Mayor-Cucapah (Mexico) earthquakes are analyzed by using a tightly-coupled integration. The performance of the integrated results is validated by both time and frequency domain analysis. We detect the P-wave arrival and observe small-scale features of the movement from the integrated results and locate the epicenter. Meanwhile, permanent offsets are extracted from the integrated displacements highly accurately and used for reliable fault slip inversion and magnitude estimation.1. Introduction
Earthquake early warning, which is the rapid detection of an ongoing earthquake, prediction of the expected ground shaking based on information extracted from the early arriving P-waves, and transmission of a useful warning prior to the onset of damaging ground shaking, is considered to be an effective, pragmatic, and viable tool for the earthquake emergency response and seismic hazard mitigation [1,2]. In the standard approaches, earthquake early warning systems have historically been based on seismic sensors. Such systems have been implemented in seismically active seismic regions, e.g., Japan, Mexico and California [3–5].
Earthquake-induced coseismic displacement is the essential information required for rapid source and rupture inversion. However, due to the rotation, tilt, drift and saturation problem of seismic instruments (strong motion sensors and broadband seismometer) and imprecision in the numerical integration process, the integrated displacements are not reliable in real-time [6]. Recent advances in the performance of real-time high-rate GPS, estimates of permanent displacement directly, mean that its use can potentially be complementary to the seismic-based methodologies for earthquake early warning [1,7–10]. The main weaknesses of current GPS measurements are the lower sampling rates (1∼50 Hz) and the larger high-frequency noise contribution [11], and so the GPS-derived dynamic motions are not accurate enough to identify the first arrival wave (P-wave). While strong motion sensors are able to sample at very high rates (e.g., 200 Hz) and perform very well in the high-frequency range as it is much more sensitive to ground motions than GPS receiver, especially in the vertical direction. The complementary nature of GPS and seismic sensors for station displacement estimation and P-wave detection is well recognized and the integrated processing of the two dataset is a hot topic in GPS seismology for obtaining more accurate and reliable displacements and P-wave arrival time [12,13].
Several loosely-integrated approaches have been proposed to fuse accelerometer with collocated GPS displacement data [14–18]. As the GPS coordinates are already estimated prior to integration with the accelerometer, the precise dynamic information provided by accelerometers cannot be used to enhance the GPS-only solutions in these integration algorithms. In order to combine all the advantages of both sensors, Li et al. [19] proposed an approach of integrating the strong motion data into the ambiguity-fixed precise point positioning. A tightly-integrated filter is developed to estimate coseismic displacements from raw GPS phase and pseudorange observations and raw strong motion data. In this filter, seismic data can improve the GPS estimates in terms of ambiguity fixing, besides, and the tightly-integrated filter can also provide displacements with better accuracy compared to the loosely-integrated approach [13,19].
In this study, we apply the tightly-coupled integration to analyze collocated GPS and seismic data collected during the 2011 Tohoku-Oki (Japan) and the 2010 El Mayor-Cucapah (Mexico) earthquakes. Time and frequency domain analysis show that the integrated displacement and velocity waveforms are more accurate than GPS-only or seismic-only results. The integrated displacement waveform can capture both transient phenomena (waves) and permanent or static deformation. From the integrated results, we detect the P-wave arrival, locate the epicenter, and extract the permanent offsets for static slip inversion and magnitude estimation.
2. Data Processing
For the strong motion station r at the epoch k, the accelerometer measurement ar,k can be expressed as:
In loosely-integrated procedures, the GPS phase and pseudorange data are first analyzed to estimate station displacements by using either relative network positioning or precise point positioning. The GPS-derived displacement at the station r and epoch k can be expressed as:
The GPS displacement Equation (2) is combined with the accelerometer Equation (1) for the measurement update of the Kalman filter. The state vector Xk can be expressed as:
The accelerometer data can be applied as strict constraints on the position variation between epochs and therefore improves GPS ambiguity resolution and outlier identification. Here, we apply the tightly-coupled integration Kalman filter to analyze raw GPS phase and pseudorange observations and raw strong motion data. The linearized equations for raw carrier phase and pseudo-range observations can be expressed as follows [20,21]:
Integer ambiguity fixing in PPP requires not only precise satellite orbit and high-rate satellite clock corrections but also uncalibrated phase delay (UPD) [22]. With the received corrections of GPS satellite orbits, clocks and UPDs, the raw observation equations can be simplified as:
At the epoch k, the state vector can be expressed as:,
The measurement update with raw GPS and accelerometer observations of Equations (1), (7) and (8) is applied at every GPS epoch. The time update of Equation (4) is performed for every accelerometer sample. The integer ambiguity resolution is attempted at every GPS epoch, L1 and L2 ambiguities are fixed simultaneously using integer estimation methods [23,24]. The ratio of the second minimum to the minimum quadratic form of residuals is applied to decide the correctness and confidence level of integer ambiguity candidate (the threshold for ratio test is set to 3 [25,26]).
3. Results and Discussion
The 2011 Mw 9.0 Tohoku-Oki earthquake (11 March 2011, 05:46:24 UTC) in Japan and the 2010 Mw 7.2 El Mayor-Cucapah earthquake (4 April 2010, 22:40:42 UTC) in Mexico were well recorded not only by strong motion stations, but also by high-rate GPS receivers. They are good examples to evaluate the performance of integrated displacements for which abundant high-rate GPS and strong motion records are available [1,27].
We firstly processed 1 Hz data of about 90 globally distributed real-time IGS stations using the EPOS-RT software of GFZ [28] in simulated real-time mode for providing GPS orbits, clocks and UPD corrections at 5 s sampling interval. Based on these corrections, we process the GPS and strong motion data collected at about thirty collocated stations during the Tohoku-Oki and El Mayor-Cucapah earthquakes. As PPP can be performed with a single GPS receiver, the integrated displacements are estimated on a pair-by-pair basis for each collocated GPS and strong motion pair.
For the 2011 Tohoku-Oki earthquake, the 1 Hz GPS data is collected at the GPS Earth Observation Network System (GEONET) stations operated by the Geospatial Information Authority (GSI) of Japan. One hundred Hz accelerometer data is collected from strong motion stations of the K-Net and Hi-Net. For the 2010 El Mayor-Cucapah earthquake, 5 Hz GPS data is collected from the California Real-Time Network (CRTN) and Plate Boundary Observatory (PBO). Two hundred Hz accelerometer data is collected from strong motion stations of the Southern California Seismic Network (SCSN) operated by the USGS (U.S. Geological Survey) and Caltech.
3.1. Comparison of GPS, Seismic and Integrated Waveforms
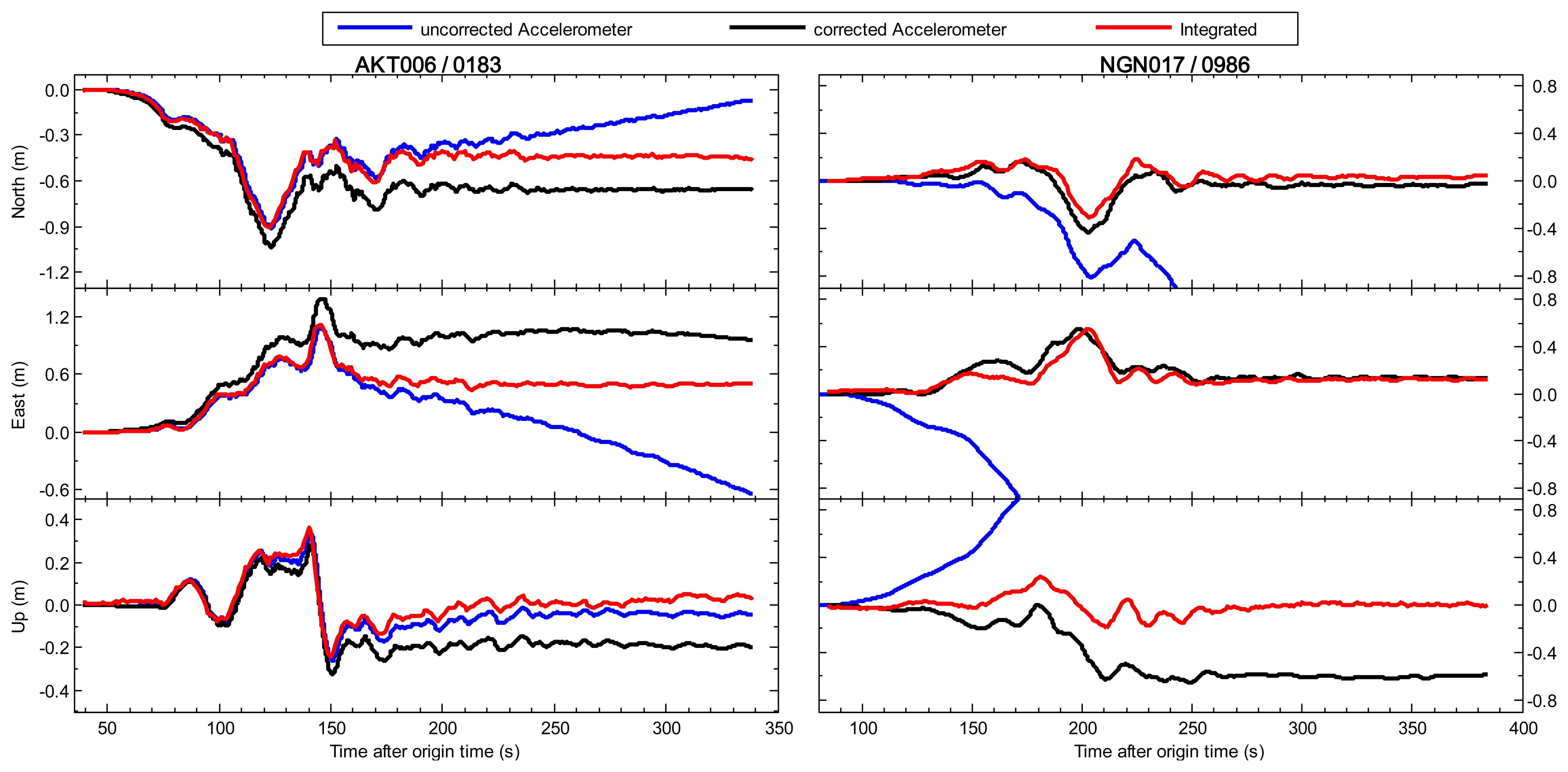
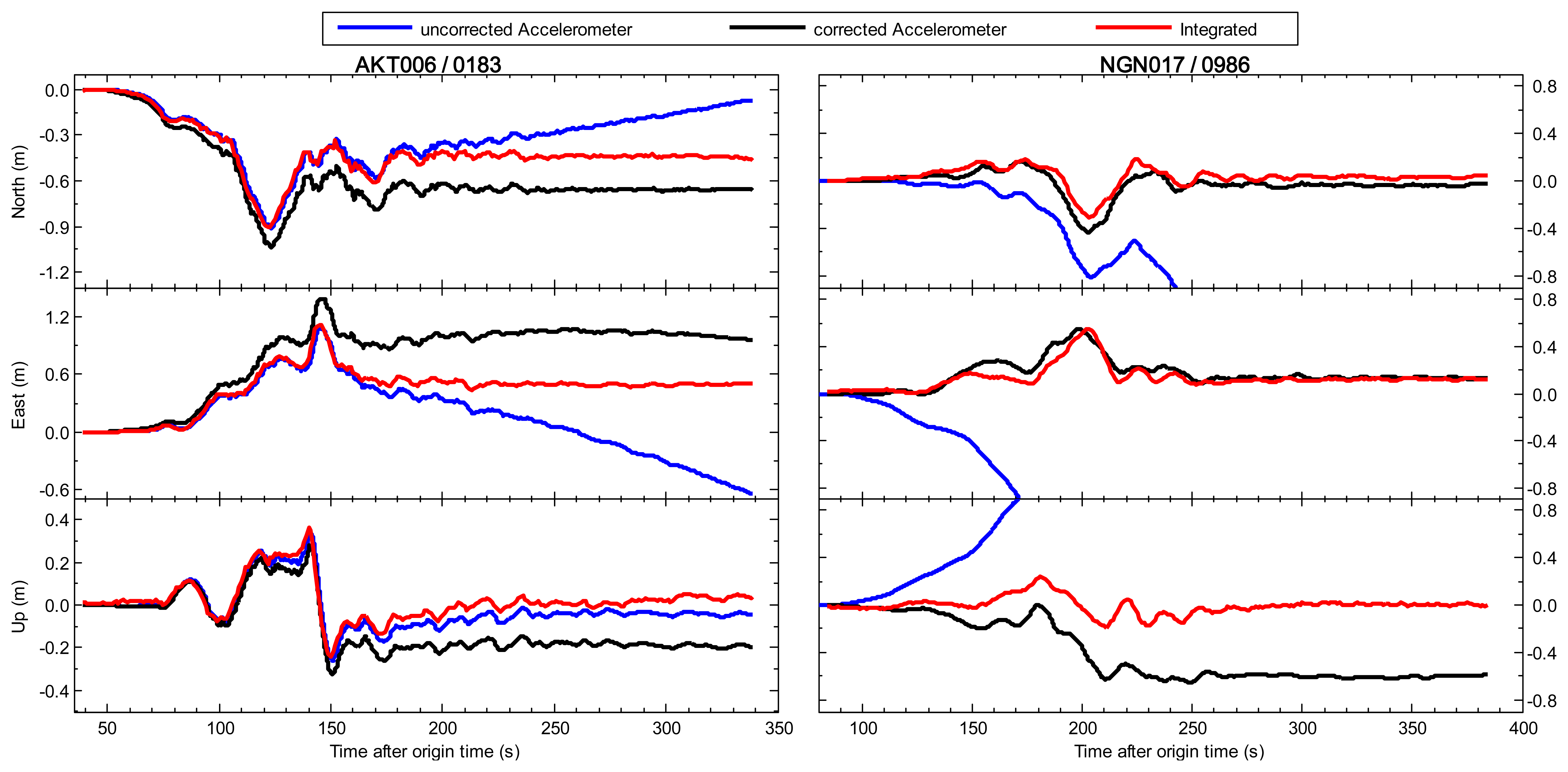
We compare the integrated displacements with seismic-only waveforms obtained from double integration of raw acceleration data. The results of two collocated pairs AKT006/0183 and NGN017/0986 are shown in Figure 1 as an example. The left sub-figures show the entire period of the seismic shaking in north/east/up components at AKT006/0183, and the right ones show the seismic shaking at NGN017/0986 in the same three components. The GPS station 0183 (40.2154° N, 140.7873° E), which is located 251 km from the epicenter of Tohoku-Oki earthquake, is collocated with K-Net seismic station AKT006 (about 20 m away from GPS station), and the other pair NGN017 and 0986 station within 5 km distance, where the distance to the epicenter is about 480 km.
The uncorrected seismic displacements are traditionally observed from zero-order corrected with only consideration removing the pre-event mean bias. Although the dynamic motions can be determined, a linear or parabolic drift is apparent in the latter part of each displacement time series, and the permanent coseismic offset is lost in a seismic-only solution. The corrected seismic displacements are derived from the baseline-corrected strong motion recordings which are processed using the automatic empirical baseline correction scheme proposed by Wang [29]. Although the corrected seismic displacements have a high degree of similarity of the dynamic component with the integrated results, they still maintain several decimeter differences in permanent coseismic offsets due to the effect of the residual baseline bias error. From the integrated displacement waveforms, there are obvious permanent coseismic offsets which are about 0.47 m, 0.51 m, and 0.03 m in the north, east, and up components at station AKT006/0183, while the permanent offsets of station NGN017/0986 are relatively small, about 0.04 m in the north, 0.12 m in the east, and 0.01 m in the up components. It is demonstrated that the Wang's method is currently considered to be the most robust seismic-alone one [30], but more accurate displacements without offsets should be relied on the GPS-aided baseline correction method [11].
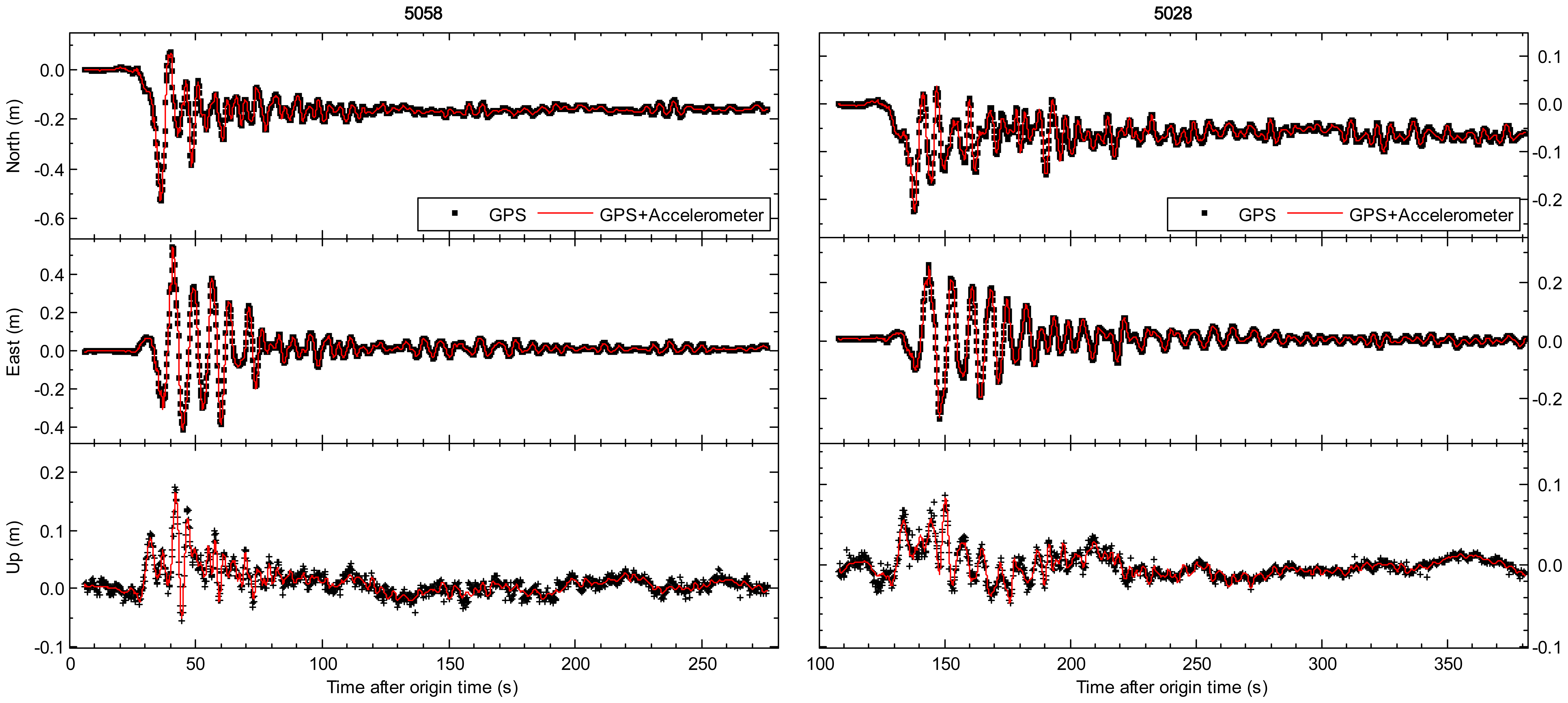
In Figures 2 and 3, we compare the tightly-integrated displacements (the red line) and GPS-only displacements (the black cross symbols). The results of the AKT006/0183 and NGN017/0986 pairs are respectively shown in the left and right side of Figure 2, and the similar results of the 5058/P496 and 5028/P744 pairs are also shown in Figure 3. The GPS station P496, which is located about 60 km from the epicenter of 2010 El Mayor-Cucapah earthquake, is collocated with SCSN seismic station 5058 (about 70 m separation). The other pair P744 and 5028 station are within 140 m of each other, and the distance from them to the epicenter is about 65 km. All sub-figures from top to bottom depict the entire period of seismic shaking in north, east and up components. We can see that the integrated displacements are in good agreement with GPS-only solution in terms of peak displacements, permanent offsets and long-period stability. However, it is clearly shown that the GPS-only displacements are with lower sampling rate and higher noise compared to the integrated displacements. The root mean square (RMS) values of GPS-only solution (10 min pre-event displacement series) are 1.1, 1.1 and 3.0 cm respectively in north, east and vertical components. The precision of integrated displacement is significantly improved by precise dynamical information provided by seismic sensors.
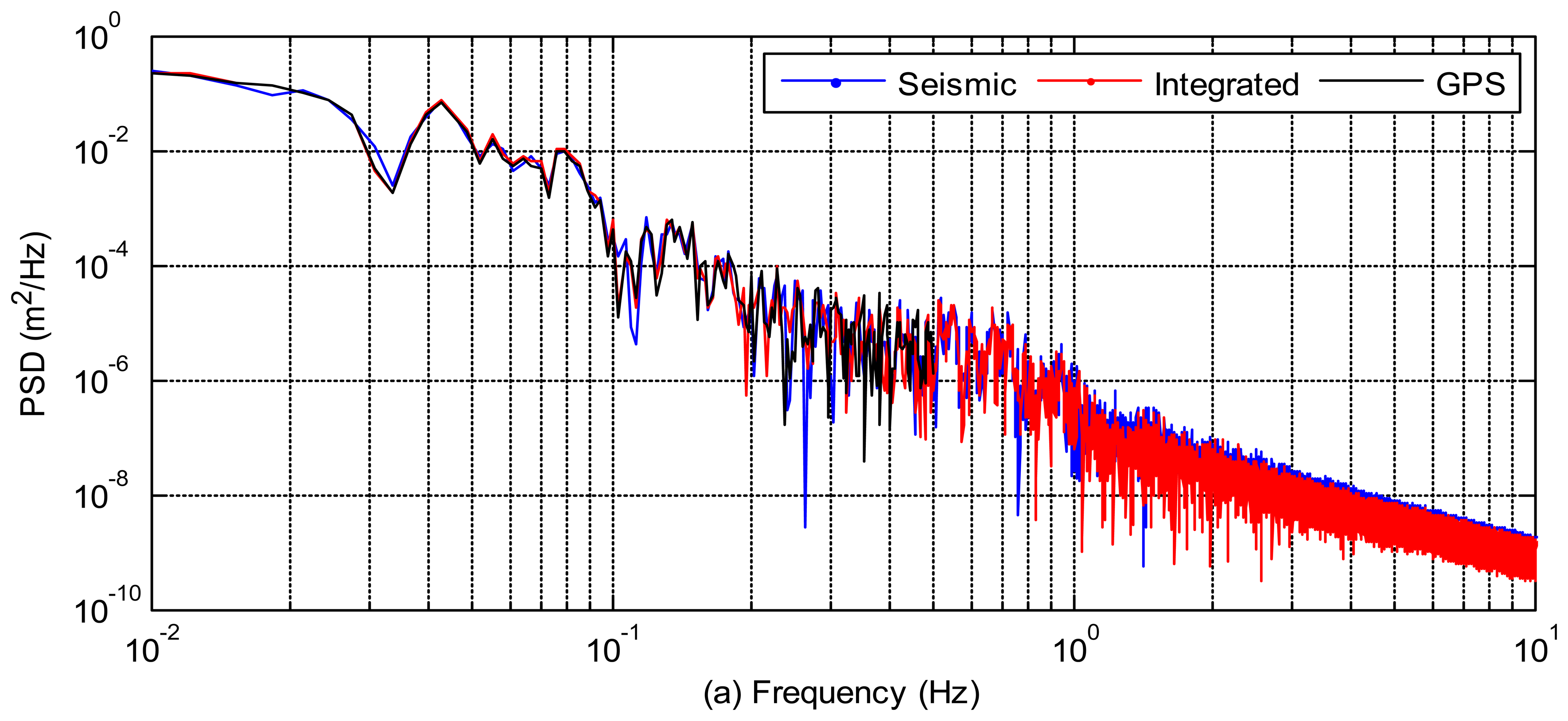
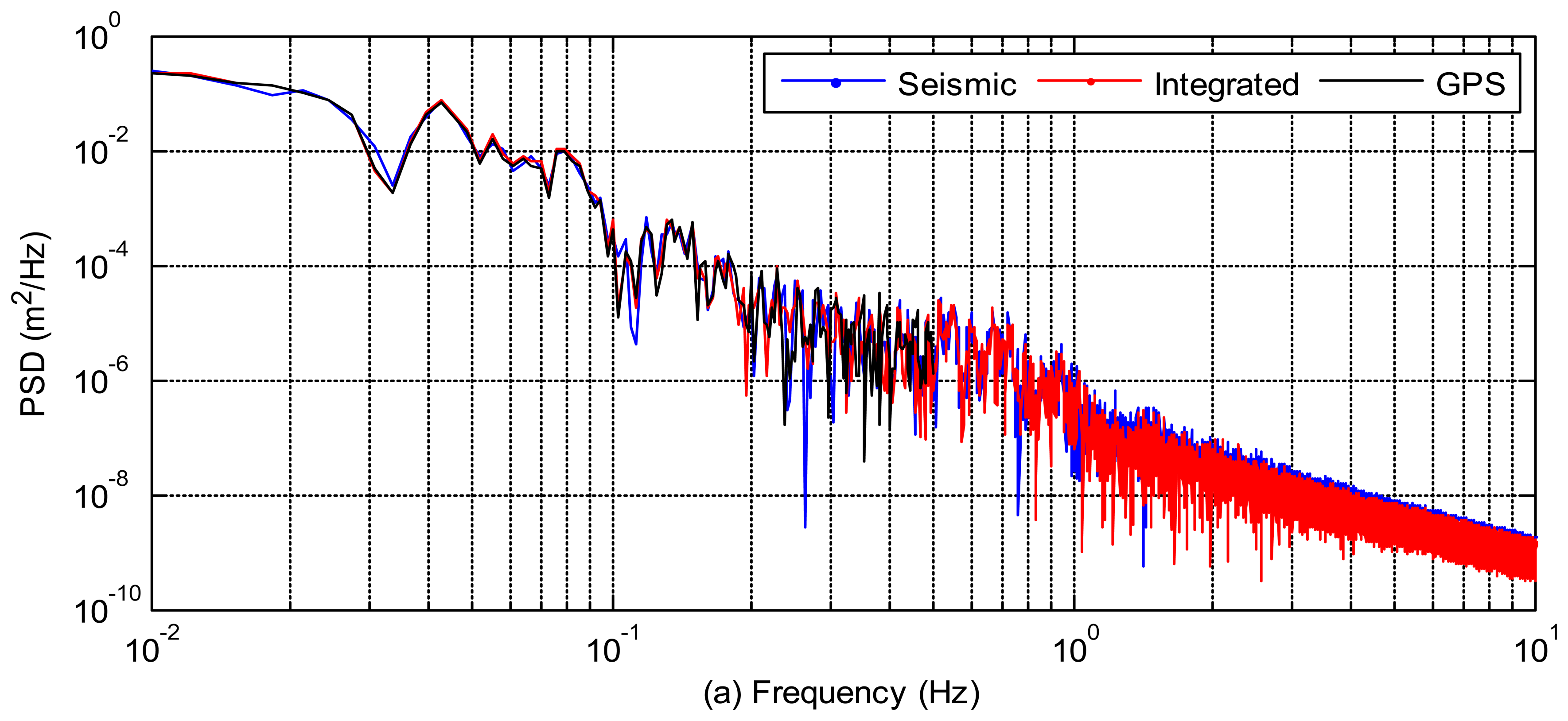
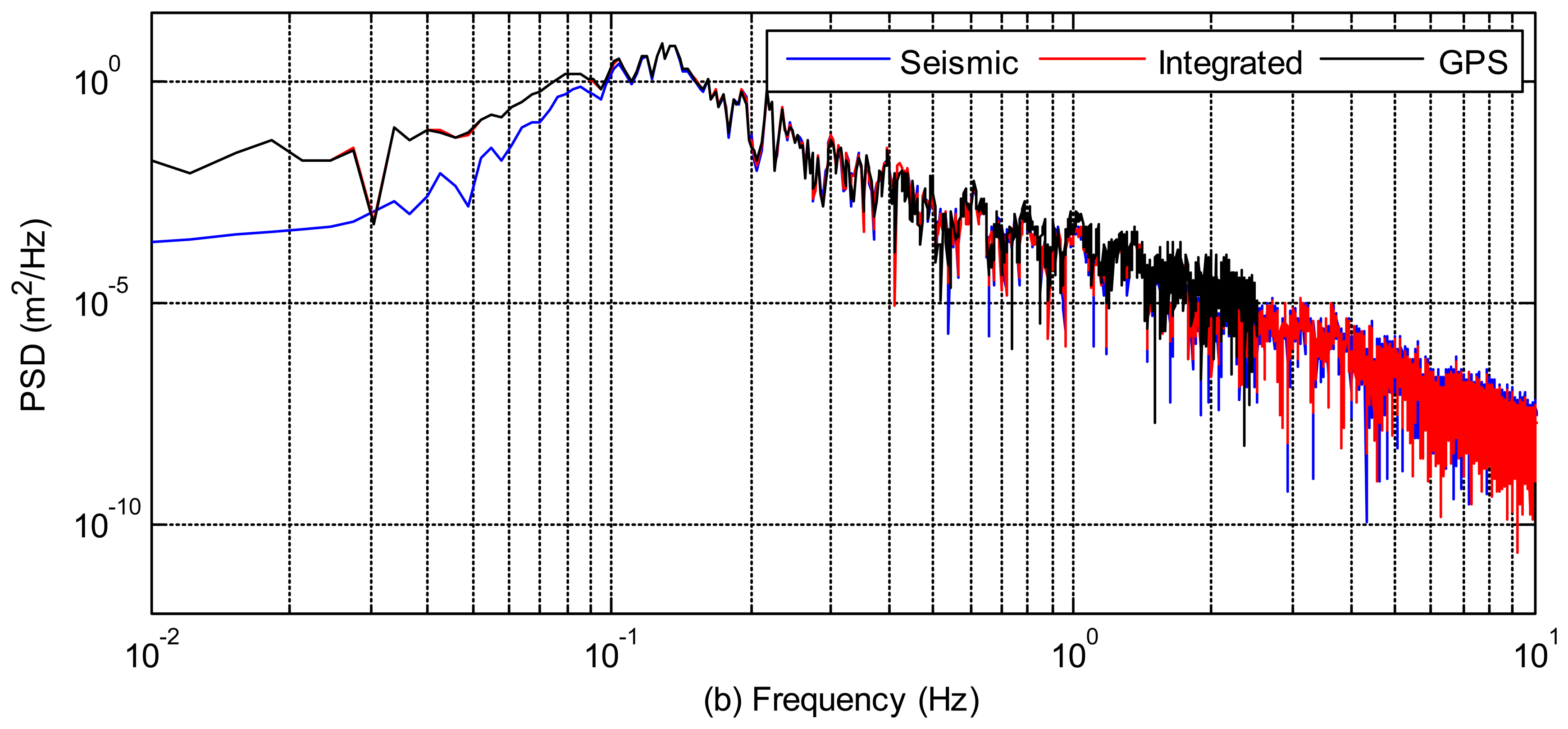
The power spectral densities of the three kinds of displacements (GPS-only, seismic-only, and integrated displacements) at AKT006/0183 and P744/5028 pairs are also compared in Figure 4 to illustrate the frequency content of the signal. The frequency domain analysis of these waveforms shows in which frequency bands each data type is reliable. GPS performs better at lower frequencies and seismic sensor is better at higher frequencies. We can see that the power spectral densities of integrated displacements follow the GPS-only spectrum at the low frequencies and the seismic-only spectrum at the high frequencies. From the power spectral density analysis, we can also infer that the integrated waveform is more precise and accurate than the GPS-only or seismic-only waveforms. An accurate broadband waveform, which has the advantages of both sensors, has been achieved.
3.2. Detection of P-Wave Arrival
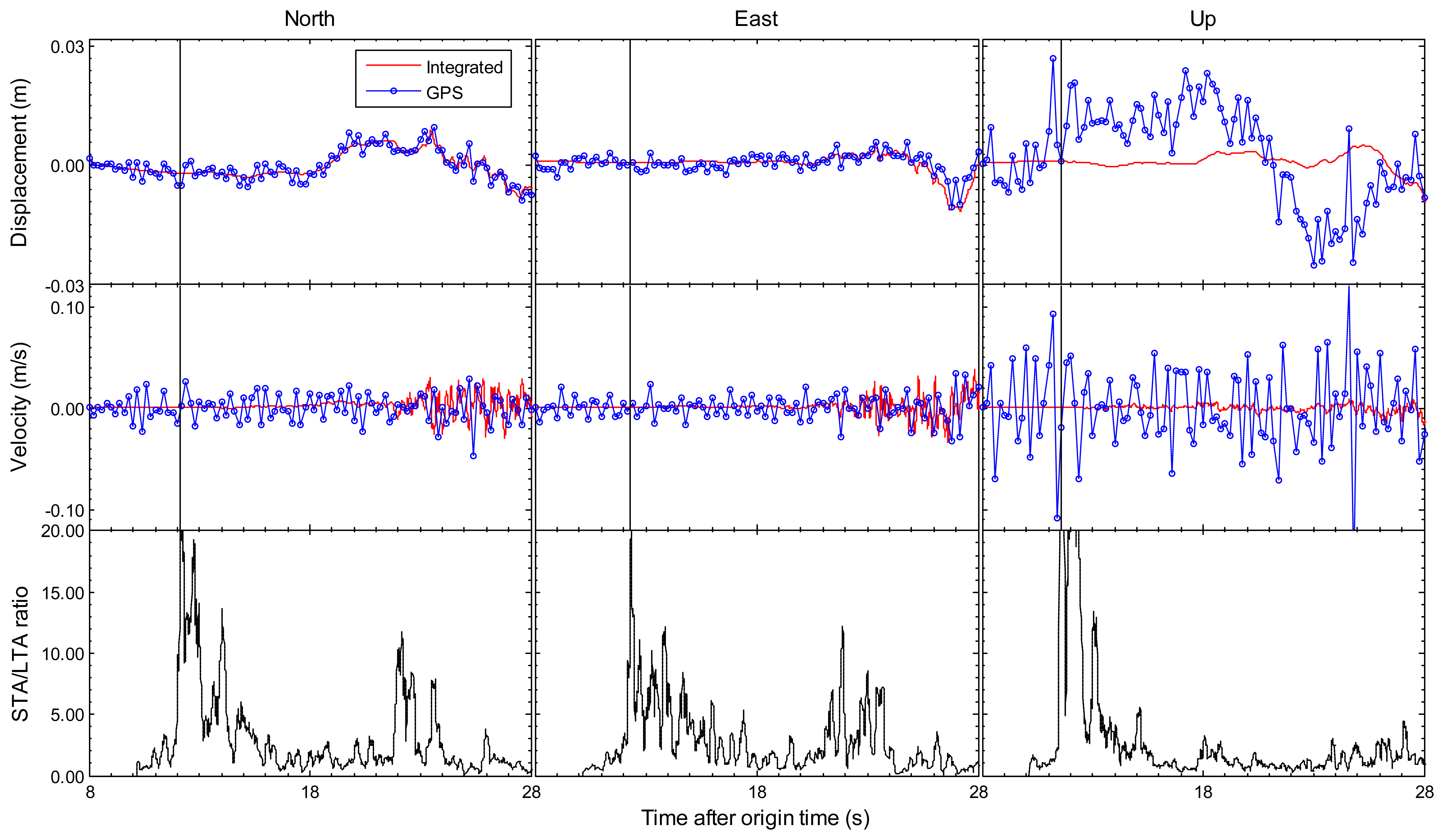
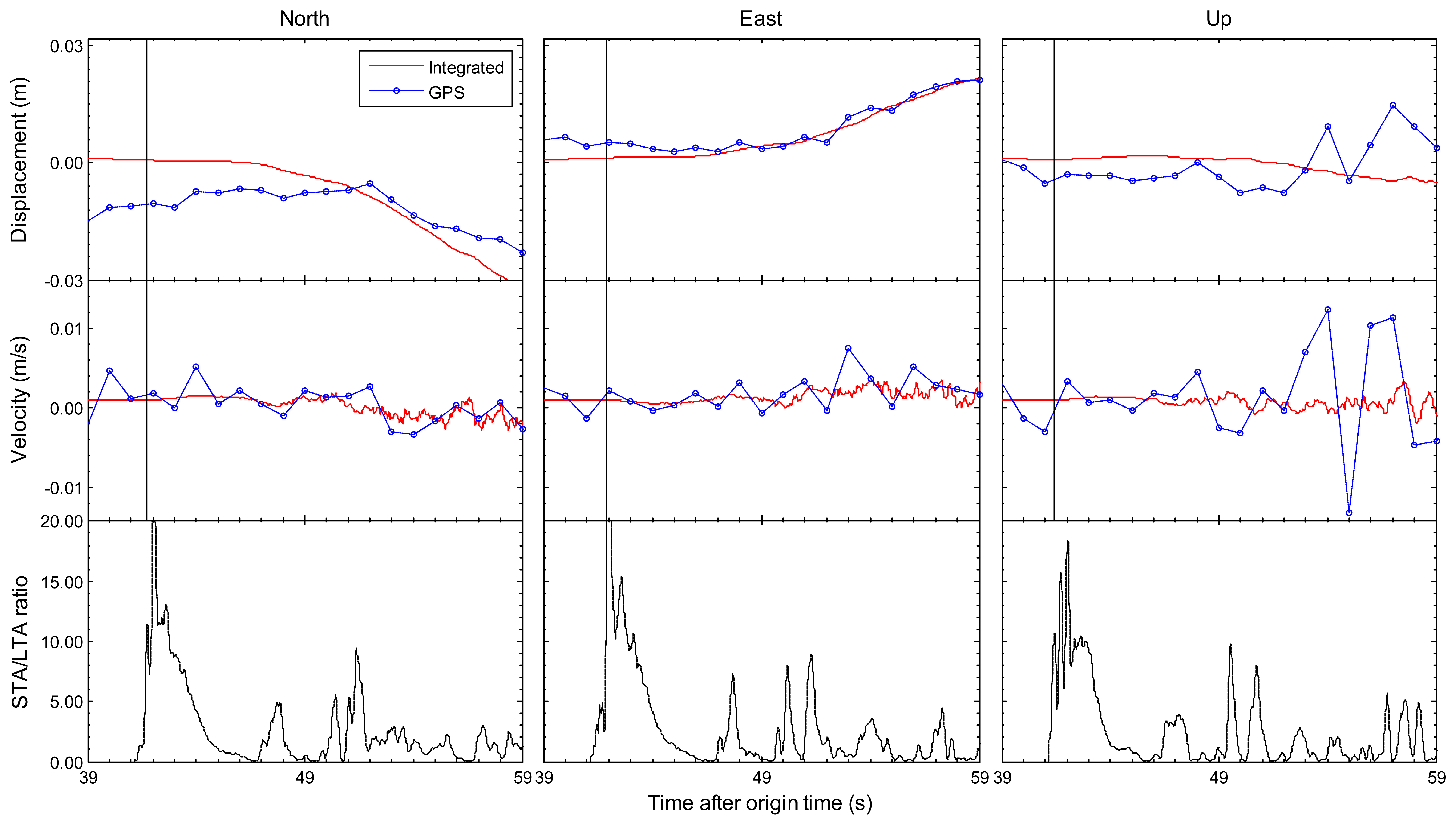
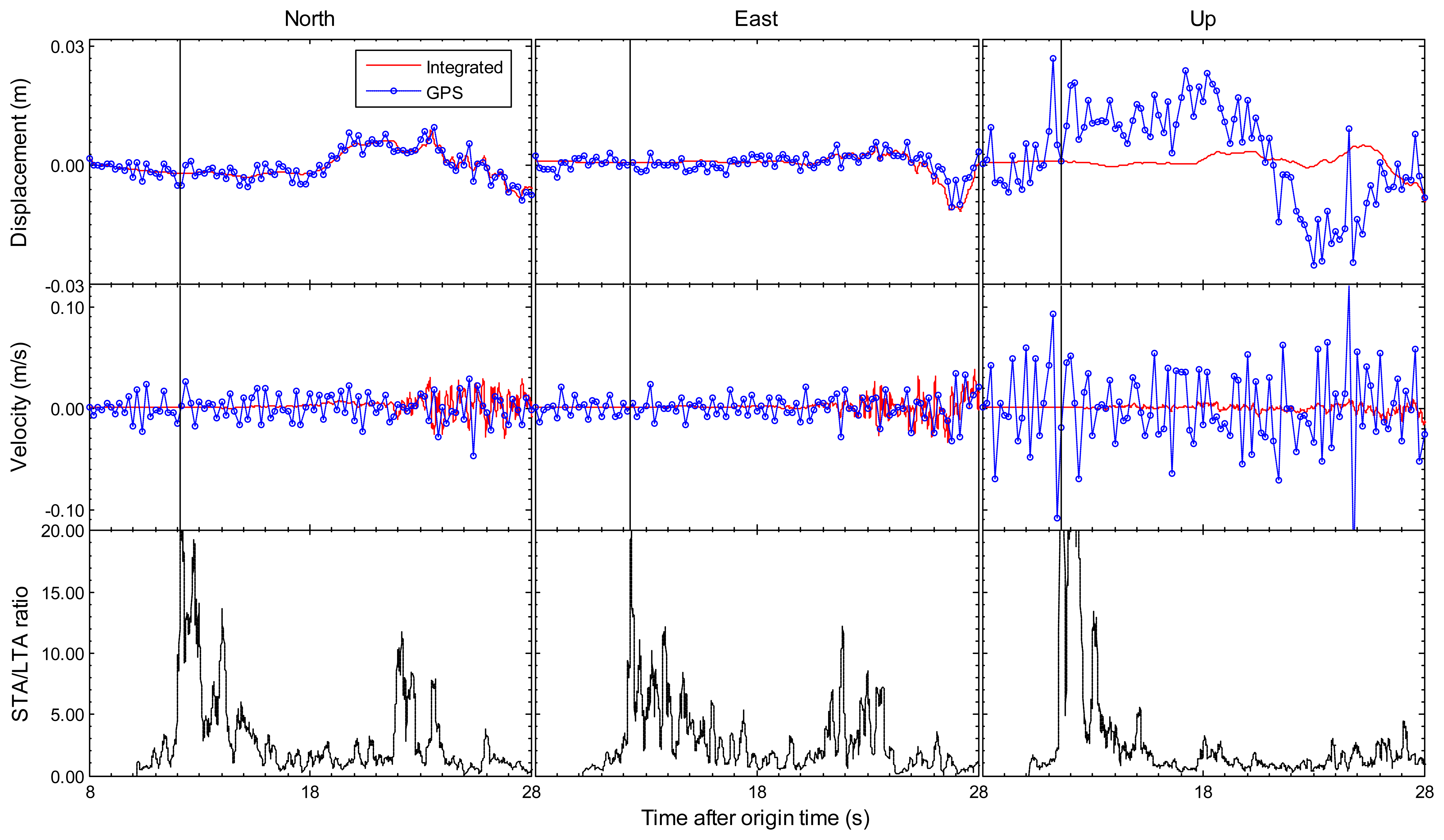
Earthquake monitoring and early warning systems not only depend on the accurate estimation of permanent displacements, but also rely on the capability of the sense of P-wave arrival which is employed to predict the arrival and intensity of destructive S and surface waves. Figures 2 and 3 have shown that the integrated results could get accurate permanent offsets. The following sections mainly focus on another issue. The enlarged view of the first 20 s of the integrated and GPS-only results for station 5028/P744 is shown in Figure 5, and the similar enlarged view for station AKT006/0183 is shown in Figure 6. From coseismic displacement and velocity waveforms, we can observe that the GPS-only solution is noisy and has a precision limited to several millimeters in displacement and few centimeters per second in velocity. The vertical component is much noisier as expected, due to the satellite constellation configuration and the high correlation between zenith tropospheric delay and the height component. The precision of vertical displacement is of the order of few centimeters, and vertical velocity precision is around several centimeters per second, which is not enough to detect P-wave accurately. With the aid of the seismic data, the tightly-integrated filter is capable of producing a precise integrated displacement and velocity waveform, especially in the up component. The small-amplitude P-wave can be clearly observed, and the P-wave arrival can also be easily detected from the integrated waveform. This is a significant improvement over the GPS-only solution where earthquake signal is detected only after the S-wave arrival, which is generally a few seconds later than the P-wave arrival for near-field stations.
The bottom sub-figures in Figures 5 and 6 are STA/LTA ratio values based on tightly-integrated results for north/east/up components, which are used to pick up the earthquake P-wave arrival. The short-term average (STA) through long-term average (LTA) picker is the most broadly used automatic algorithm in seismology [31]. It continuously calculates the average values of the absolute amplitude of a seismic signal in two consecutive moving-time windows. The short time window (STA) is sensitive to seismic events while the long time window (LTA) provides information about the temporal amplitude of seismic noise at the site [32]. When the ratio of both exceeds a pre-set threshold means the arrival of P-wave. The STA/LTA picker parameter settings are always a tradeoff between several seismological and instrumental considerations. For these two earthquake events in this paper, the STA window duration is 0.2 s, the LTA window duration is 2 s, and the pre-set threshold is set to 10. We can clearly identify P-wave arrivals in the STA/LTA ratio time series. It is noted that the P-wave appears in vertical component first and in the horizontal components a few milliseconds later. The detected earthquake P-wave arrival time of station AKT006/0183 is 41.41 s compared with the USGS reference value 41.55 s calculated by TauP Toolkit [33], and the P-wave arrival time of station 5028/P744 is 11.49 s compared with the reference value 11.58 s. It is demonstrated that the integrated results could be used to pick up an accurate P-wave arrival time. However, it is difficult for the GPS-only solution to be accurately identified P-waves because of the significantly less precision. Thus, the integrated result improves on both seismic-only and GPS-only methods, by providing the full spectrum of seismic motions from the detection of P-wave arrivals to the estimation of permanent offsets.
When P-waves are detected at four or more near-field GPS/strong motion pairs, the epicenter, the velocity of earthquake wave and the origin time can be determined by using a least squares method as follows:
In order to test this technique, the five GPS/strong motion pairs where P-wave is detected earliest during the El Mayor-Cucapah earthquake are used. The detected earthquake P-wave arrival time is 0.09 s, 0.15 s, 0.11 s, 0.10 s, and 0.13 s later than the USGS reference values of P-wave arrival time at the five pairs. The epicenter estimate is roughly 2.5 km away from the U.S. Geological Survey (USGS) epicenter estimate. The origin time estimate is 0.12 s later than the USGS reference value of 22:40:57 (GPS time). The accurate detection of P-wave arrival is critical for earthquake early warning, as it allows for prediction of the arrival of the destructive S-wave. The P-wave-based earthquake parameters such as epicenter and origin time can be released before the S-wave arrival.
3.3. Extraction of Permanent Offset and Fault Slip Inversion
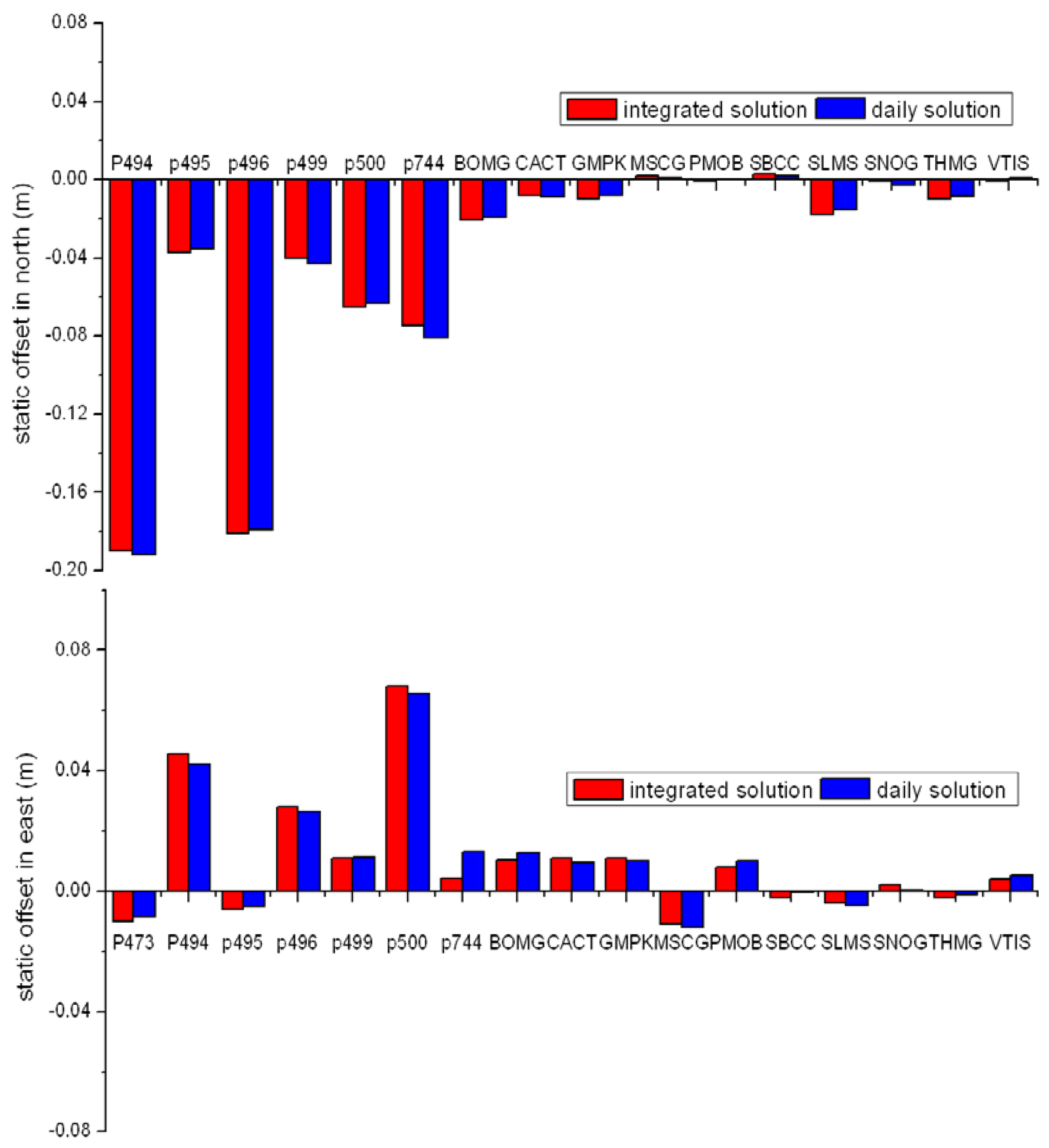
In addition to P-wave arrival time, the important information, provided by the integrated position series, is the permanent offset. We use the real-time algorithm proposed by Allen and Ziv [1] to remove dynamic oscillations and extract these offsets. The permanent offsets derived from integrated solution (about 1 min after the arrival of the earthquake wave) are compared with the ones from the post-processed daily solution in Figure 7. The RMS of the differences between them is about 3.7 mm.
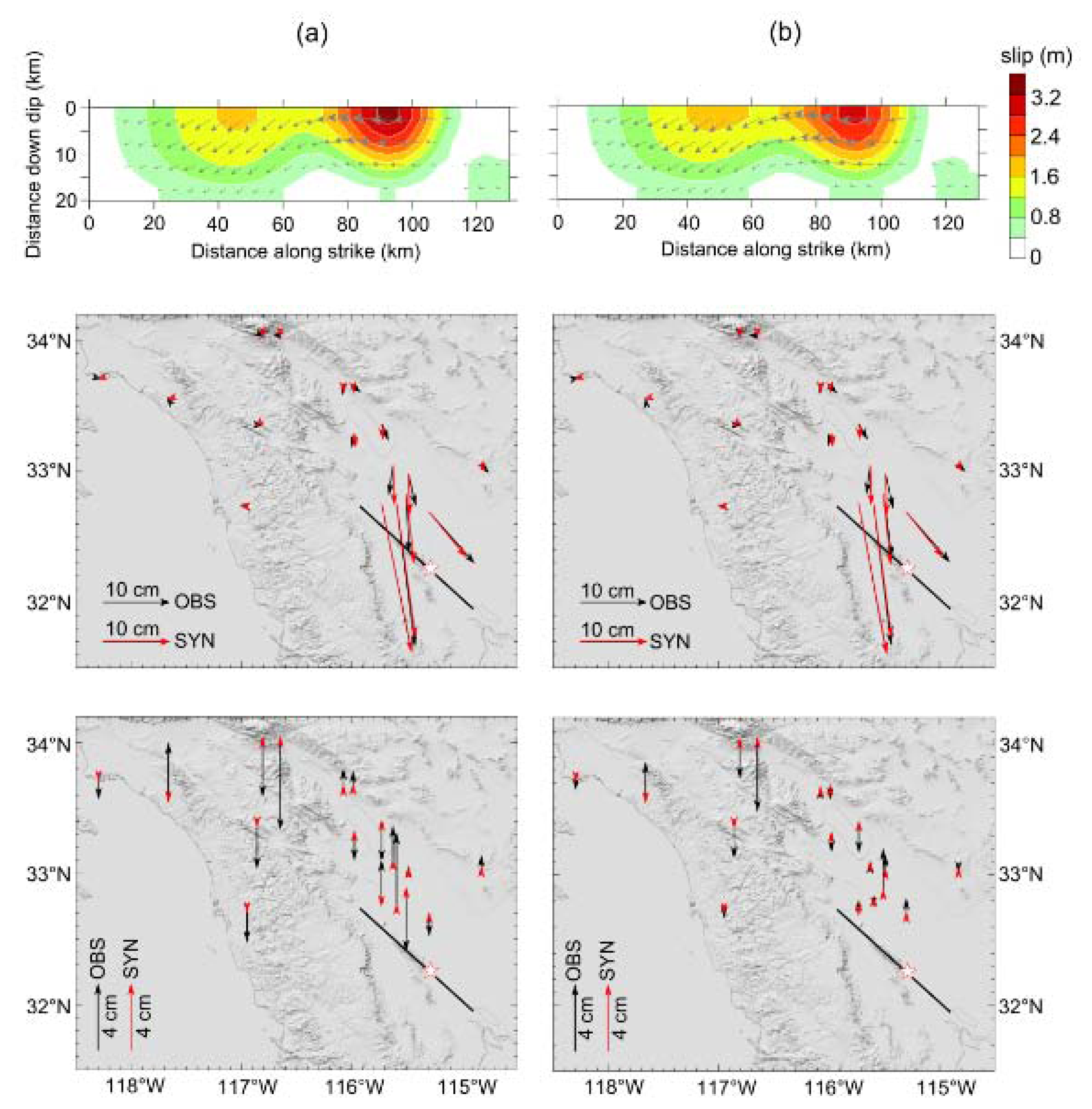
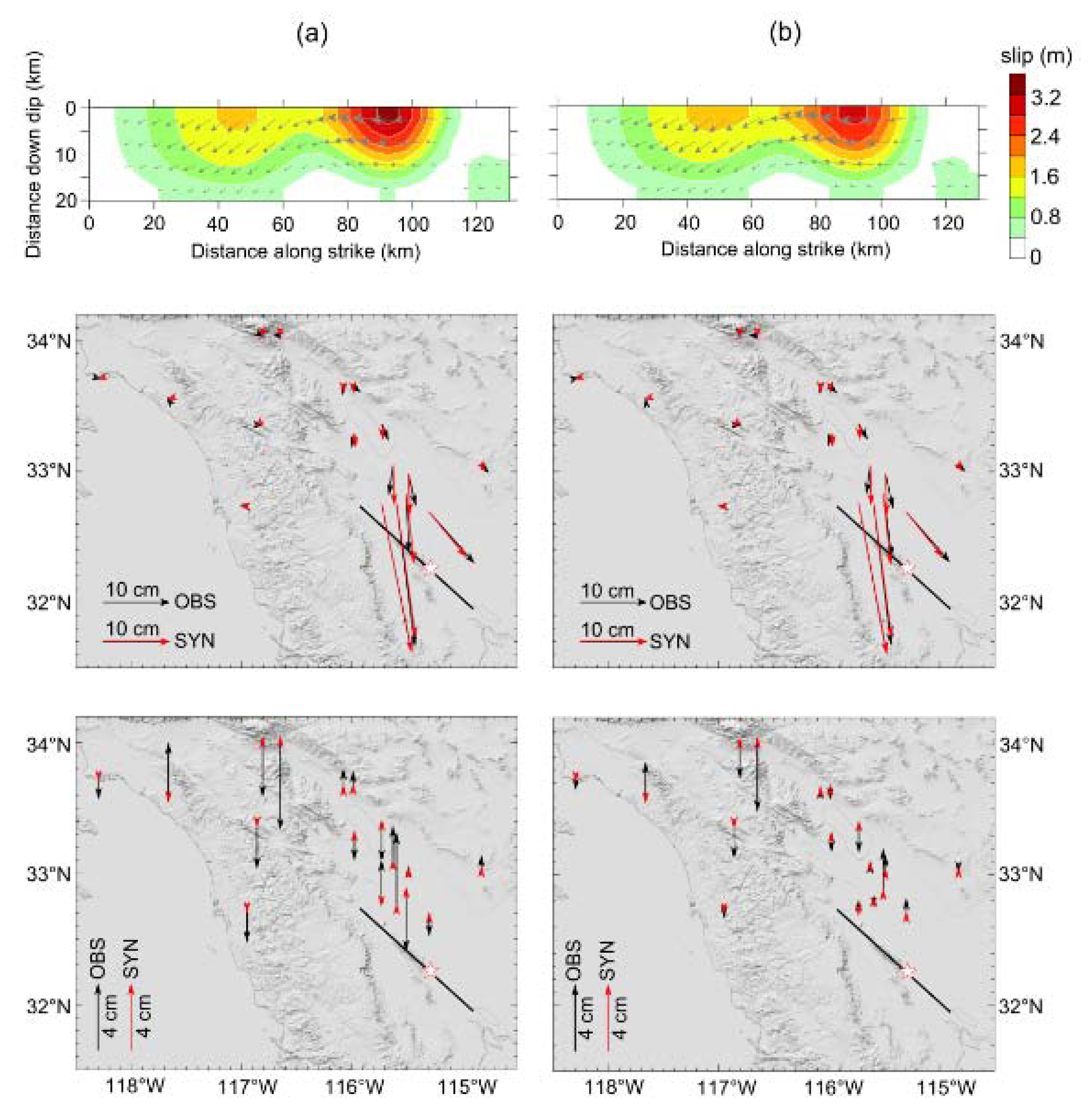
We derived the spatial distribution of the fault slip using the coseismic displacements obtained from both the real-time tightly-integrated solution and the post-processed daily solution. In the same way as done by Li et al. [34], the fault geometric parameters (strike 312°/dip 88°) are adopted from the Global Centroid Moment Tensor (GCMT) solution of the earthquake. The rake angle (slip direction relative to the strike) is allowed to vary ±20° around the GCMT solution of 186°. The fault size is given to be 130 km along the strike and 20 km along the dip, which is then divided into 26 × 4 = 104 sub-faults. In the inversion, the data is weighted twice as much for the two horizontal components as for the vertical component.
The inversion results are shown in Figure 8. The two inversions result in scalar seismic moments of 7.27 × 1019 Nm and 7.18 × 1019 Nm respectively, equivalent to moment magnitude of Mw7.18 for both. Although there are some differences existing on the maximum slip values which may be caused by the inconsistency in the vertical component between the two datasets, the two inversion results are quite similar not only in the moment magnitude, but also in the slip distribution pattern. The major slip area occurred at a very shallow depth (near the surface) at about 90 km along the strike direction on the fault plane. The rake variation shows that there is a purely right lateral strike slip at the northwest of the fault, and a minor normal fault component occurs at the south east of the fault. Considering the hypocentral location, we can confirm that this earthquake is an asymmetric bilateral rupture event: the rupture mainly propagates northwestward from the hypocenter during the source process. Overall, the comparison of the two inversion results shows that the integrated solution can provide a reliable estimation of earthquake magnitude and even of the fault slip distribution in real time.
4. Conclusions
We analyzed the collocated GPS and seismic data collected during the 2011 Tohoku-Oki (Japan) and the 2010 El Mayor-Cucapah (Mexico) earthquakes using a tightly-coupled integration. The integrated waveform takes the advantages of both sensors and is more precise and accurate than the GPS-only or seismic-only waveforms. The power spectral densities of integrated displacements follow the GPS-only spectrum at the low frequencies and the seismic-only spectrum at the high frequencies.
The integrated displacements can provide the full spectrum of the seismic motion allowing the detection of P-wave arrivals and the estimation of permanent offsets. Small-scale features including P-waves are visible in the integrated displacement and velocity waveforms. The P-wave arrival can be picked up accurately and used for reliable determination of epicenter and origin time. Permanent offsets can also be extracted with high accuracy and used for reliable fault slip inversion and magnitude estimation. These earthquake parameters are critical for earthquake/tsunami monitoring and early warning systems.
Acknowledgments
The accelerometer data (200 Hz) was provided by the Southern California Seismic Network (SCSN) operated by the USGS (U.S. Geological Survey) and Caltech. The 5 Hz GPS data used to derive the displacement waveforms were provided by the Plate Boundary Observatory operated by UNAVCO for EarthScope. The K-NET and KiK-Net strong-motion data for the 2011 Tohoku earthquake were provided by the National ResearchInstitute for Earth Science and Disaster Prevention (NIED) of Japan. 1 Hz GEONET data was provided by the Geospatial Information Authority of Japan. Thanks also to the International GNSS Service (IGS) for providing GPS data of globally distributed reference stations. This study was supported by National Natural Science Foundation of China (Grant No. 41074024), National 973 Project China (grant No. 2013CB733301), and the Surveying and Mapping Foundation Research Fund Program, National Administration of Surveying, Mapping and Geoinformation (12-02-010).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Allen, R.M.; Ziv, A. Application of real-time GPS to earthquake early warning. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Picozzi, M.; Bindi, D.; Pittore, M.; Kieling, K.; Parolai, S. Real-time risk assessment in seismic early warning and rapid response: A feasibility study in Bishkek (Kyrgyzstan). J. Seismol. 2013, 17, 485–505. [Google Scholar]
- Kanamori, H. Real-Time Earthquake Damage Mitigation Measures. In Earthquake Early Warning Systems; Gasparini, P., Manfredi, G., Zschau, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 1–8. [Google Scholar]
- Aranda, J.E.; Jimenez, A.; Ibarrola, G.; Alcantar, F.; Aguilar, A.; Inostroza, M.; Maldonado, S. Mexico City seismic alert system. Seismol. Res. Lett. 1995, 66, 42–53. [Google Scholar]
- Allen, R.M.; Kanamori, H. The potential for earthquake early warning in southern California. Science 2003, 300, 786–789. [Google Scholar]
- Boore, D.M. Effect of baseline corrections on displacements and response spectra for several recordings of the 1999 Chi-Chi, Taiwan, earthquake. Bull. Seismol. Soc. Am. 2001, 91, 1199–1211. [Google Scholar]
- Li, X.; Ge, M.; Zhang, Y.; Wang, R.; Xu, P.; Wickert, J.; Schuh, H. New approach for earthquake/tsunami monitoring using dense GPS networks. Sci. Rep. 2013, 3. [Google Scholar] [CrossRef]
- Ge, L.; Han, S.; Rizos, C.; Ishikawa, Y.; Hoshiba, M.; Yoshida, Y.; Izawa, M.; Hashimoto, N.; Himori, S. GPS seismometers with up to 20 Hz sampling rate. Earth Planets Space 2000, 52, 881–884. [Google Scholar]
- Larson, K.M.; Bodin, P.; Gomberg, J. Using 1-Hz GPS data to measure deformations caused by the Denali fault earthquake. Science 2003, 300, 1421–1424. [Google Scholar]
- Blewitt, G.; Kreemer, C.; Hammond, W.C.; Plag, H.P.; Stein, S.; Okal, E. Rapid determination of earthquake magnitude using GPS for tsunami warning systems. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Xu, P.; Shi, C.; Fang, R.; Liu, J.; Niu, X.; Zhang, Q.; Yanagidani, T. High-rate precise point positioning (PPP) to measure seismic wave motions: An experimental comparison of GPS PPP with inertial measurement units. J. Geod. 2013, 87, 361–372. [Google Scholar]
- Meng, X. From Structural Health Monitoring to Geo-Hazard Early Warning: An Integrated Approach Using GNSS Positioning Technology. In Earth Observation of Global Changes (EOGC); Springer: Berlin/Heidelberg, Germany, 2013; pp. 285–293. [Google Scholar]
- Geng, J.; Bock, Y.; Melgar, D.; Crowell, B.W.; Haase, J.S. A new seismogeodetic approach applied to GPS and accelerometer observations of the 2012 Brawley seismic swarm: Implications for earthquake early warning. Geochem. Geophys. Geosyst. 2013, 14, 2124–2142. [Google Scholar]
- Smyth, A.; Wu, M. Multi-rate Kalman filtering for the data fusion of displacement and acceleration response measurements in dynamic system monitoring. Mech. Syst. Signal Process. 2007, 21, 706–723. [Google Scholar]
- Kogan, M.G.; Kim, W.; Bock, Y.; Smyth, A.W. Load response on a large suspension bridge during the NYC Marathon revealed by GPS and accelerometers. Seismol. Res. Lett. 2008, 79, 12–19. [Google Scholar]
- Chan, W.S.; Xu, Y.L.; Ding, X.L.; Dai, W.J. An integrated GPS-accelerometer data processing technique for structural deformation monitoring. J. Geod. 2006, 80, 705–719. [Google Scholar]
- Emore, G.L.; Haase, J.S.; Choi, K.; Larson, K.M.; Yamagiwa, A. Recovering seismic displacements through combined use of 1-Hz GPS and strong-motion accelerometers. Bull. Seismol. Soc. Am. 2007, 97, 357–378. [Google Scholar]
- Bock, Y.; Melgar, D.; Crowell, B.W. Real-time strong-motion broadband displacements from collocated GPS and accelerometers. Bull. Seismol. Soc. Am. 2011, 101, 2904–2925. [Google Scholar]
- Li, X.; Ge, M.; Zhang, Y.; Wang, R.; Guo, B.; Klotz, J.U.R.; Wickert, J.; Schuh, H. High-rate coseismic displacements from tightly integrated processing of raw GPS and accelerometer data. Geophys. J. Int. 2013, 195, 612–624. [Google Scholar]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar]
- Gao, Y.; Shen, X. Improving Ambiguity Convergence in Carrier Phase-Based Precise Point Positioning. Proceedings of the 14th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2001), Salt Lake City, UT, USA, 12–14 September 2001; pp. 1532–1539.
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar]
- Xu, P.; Shi, C.; Liu, J. Integer estimation methods for GPS ambiguity resolution: An applications oriented review and improvement. Surv. Rev. 2012, 44, 59–71. [Google Scholar]
- Han, S. Quality-control issues relating to instantaneous ambiguity resolution for real-time GPS kinematic positioning. J. Geod. 1997, 71, 351–361. [Google Scholar]
- Li, T.; Wang, J. Some remarks on GNSS integer ambiguity validation methods. Surv. Rev. 2012, 44, 230–238. [Google Scholar]
- Ohta, Y.; Kobayashi, T.; Tsushima, H.; Miura, S.; Hino, R.; Takasu, T.; Fujimoto, H.; Iinuma, T.; Tachibana, K.; Demachi, T.; et al. Quasi real-time fault model estimation for near-field tsunami forecasting based on RTK-GPS analysis: Application to the 2011 Tohoku-Oki earthquake (Mw 9.0). J. Geophys. Res. 2012, 117, B02311. [Google Scholar]
- Li, M.G.J.D.; Wickert, M.R.T.N. A novel real-time precise positioning service system: Global precise point positioning with regional augmentation. J. Glob. Position. Syst. 2012, 11, 2–10. [Google Scholar]
- Wang, R.; Schurr, B.; Milkereit, C.; Shao, Z.; Jin, M. An improved automatic scheme for empirical baseline correction of digital strong-motion records. Bull. Seismol. Soc. Am. 2011, 101, 2029–2044. [Google Scholar]
- Melgar, D.; Bock, Y.; Sanchez, D.; Crowell, B.W. On robust and reliable automated baseline corrections for strong motion seismology. J. Geophys. Res. Solid Earth 2013, 118, 1177–1187. [Google Scholar]
- Allen, R.V. Automatic earthquake recognition and timing from single traces. Bull. Seismol. Soc. Am. 1978, 68, 1521–1532. [Google Scholar]
- Trnkoczy, A.; Havskov, J.; Ottemöller, L. Seismic Networks. In New Manual of Seismological Observatory Practice 2 (NMSOP-2); Bormann, P., Ed.; Deutsches GeoForschungsZentrum GFZ: Potsdam, Germany, 2002; Volume 2, pp. 1–65. [Google Scholar]
- Crotwell, H.P.; Owens, T.J.; Ritsema, J. The TauP Toolkit: Flexible seismic travel-time and ray-path utilities. Seismol. Res. Lett. 1999, 70, 154–160. [Google Scholar]
- Li, X.; Ge, M.; Zhang, X.; Zhang, Y.; Guo, B.; Wang, R.; Klotz, J.; Wickert, J. Real-time high-rate coseismic displacement from ambiguity-fixed precise point positioning: Application to earthquake early warning. Geophys. Res. Lett. 2013, 40, 295–300. [Google Scholar]




© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Li, X.; Zhang, X.; Guo, B. Application of Collocated GPS and Seismic Sensors to Earthquake Monitoring and Early Warning. Sensors 2013, 13, 14261-14276. https://doi.org/10.3390/s131114261
Li X, Zhang X, Guo B. Application of Collocated GPS and Seismic Sensors to Earthquake Monitoring and Early Warning. Sensors. 2013; 13(11):14261-14276. https://doi.org/10.3390/s131114261
Chicago/Turabian StyleLi, Xingxing, Xiaohong Zhang, and Bofeng Guo. 2013. "Application of Collocated GPS and Seismic Sensors to Earthquake Monitoring and Early Warning" Sensors 13, no. 11: 14261-14276. https://doi.org/10.3390/s131114261