Using an Automatic Resistivity Profiler Soil Sensor On-The-Go in Precision Viticulture

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
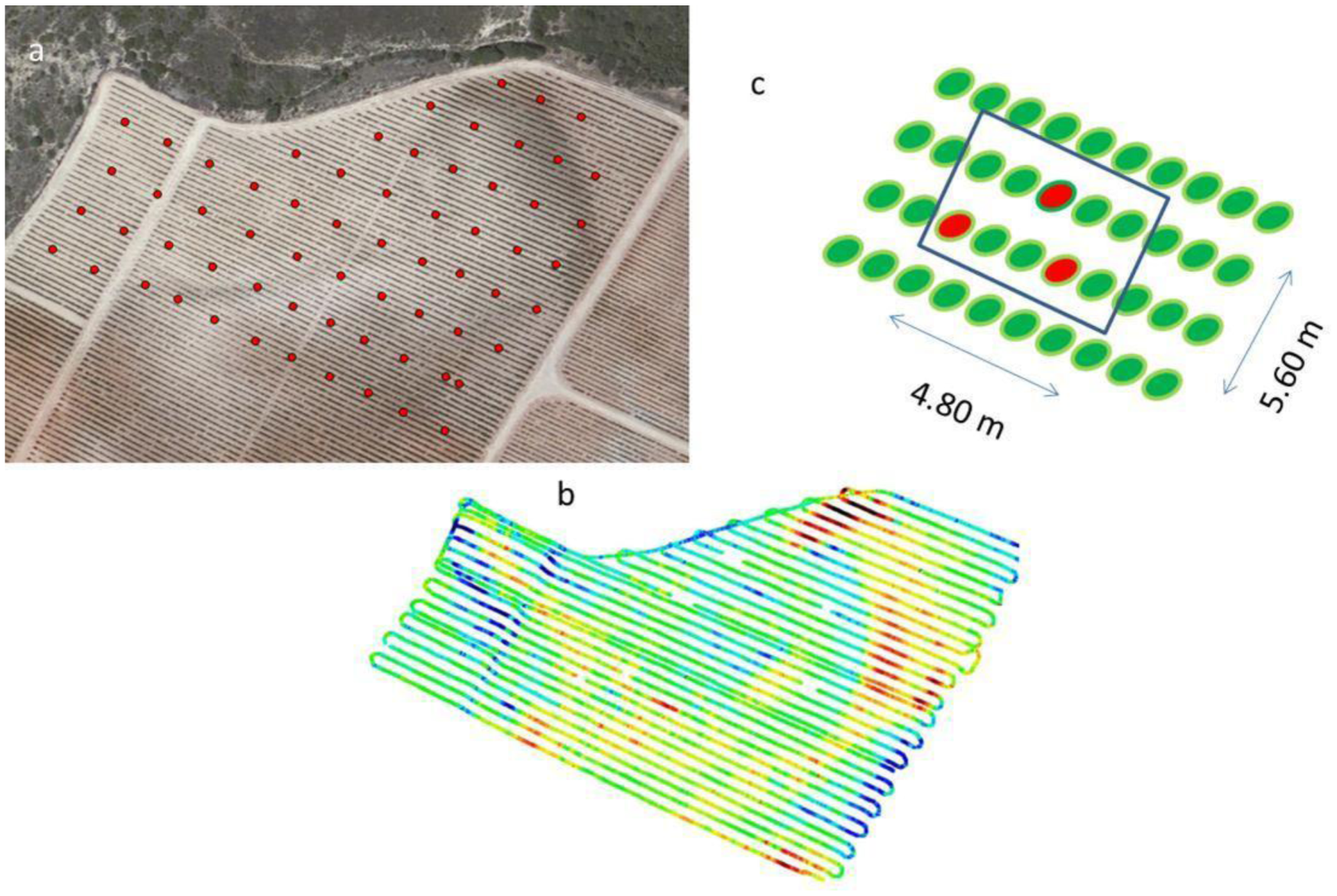
2.1. Experimental Layout
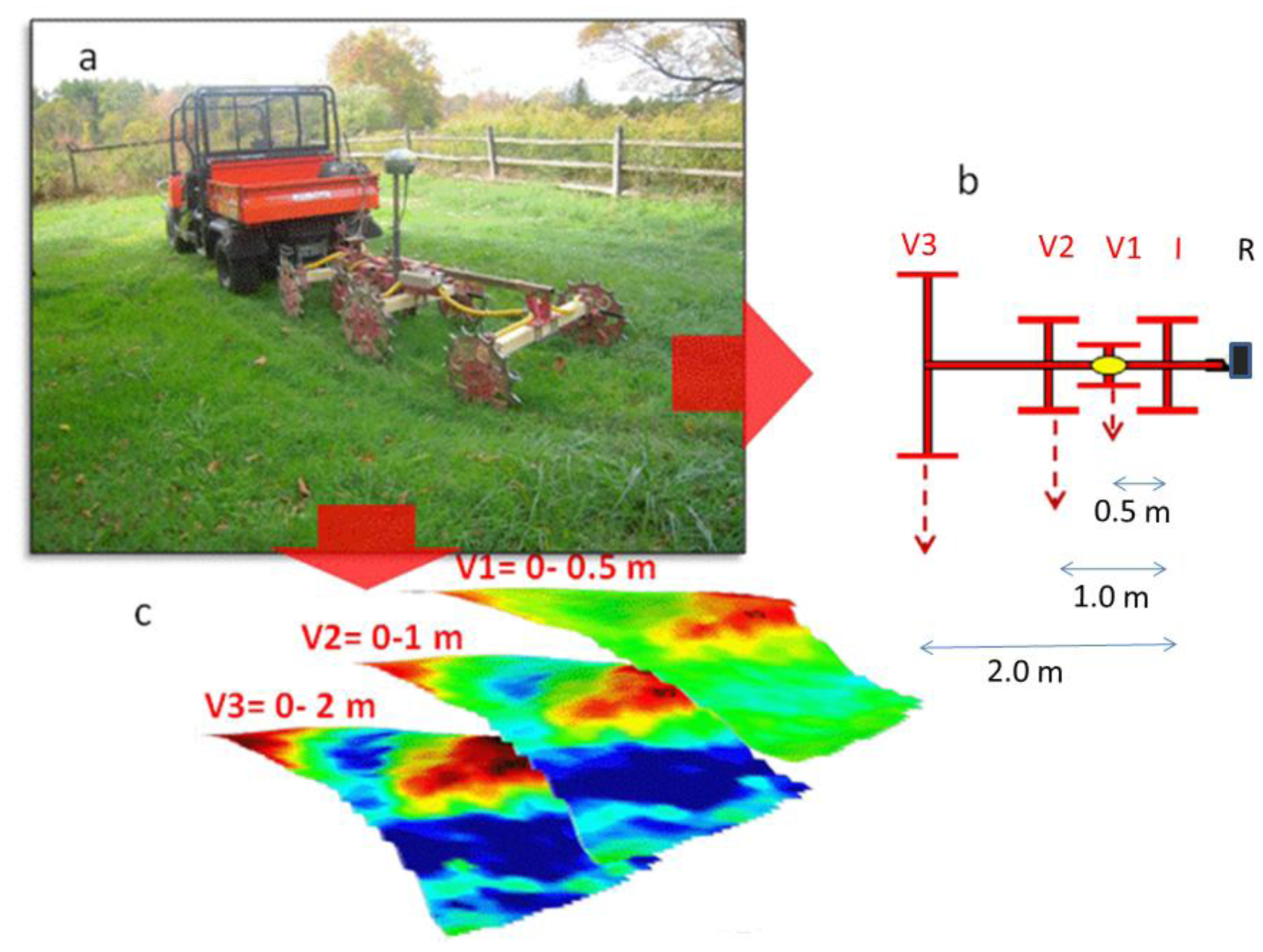
2.2. ARP Sensor
- -
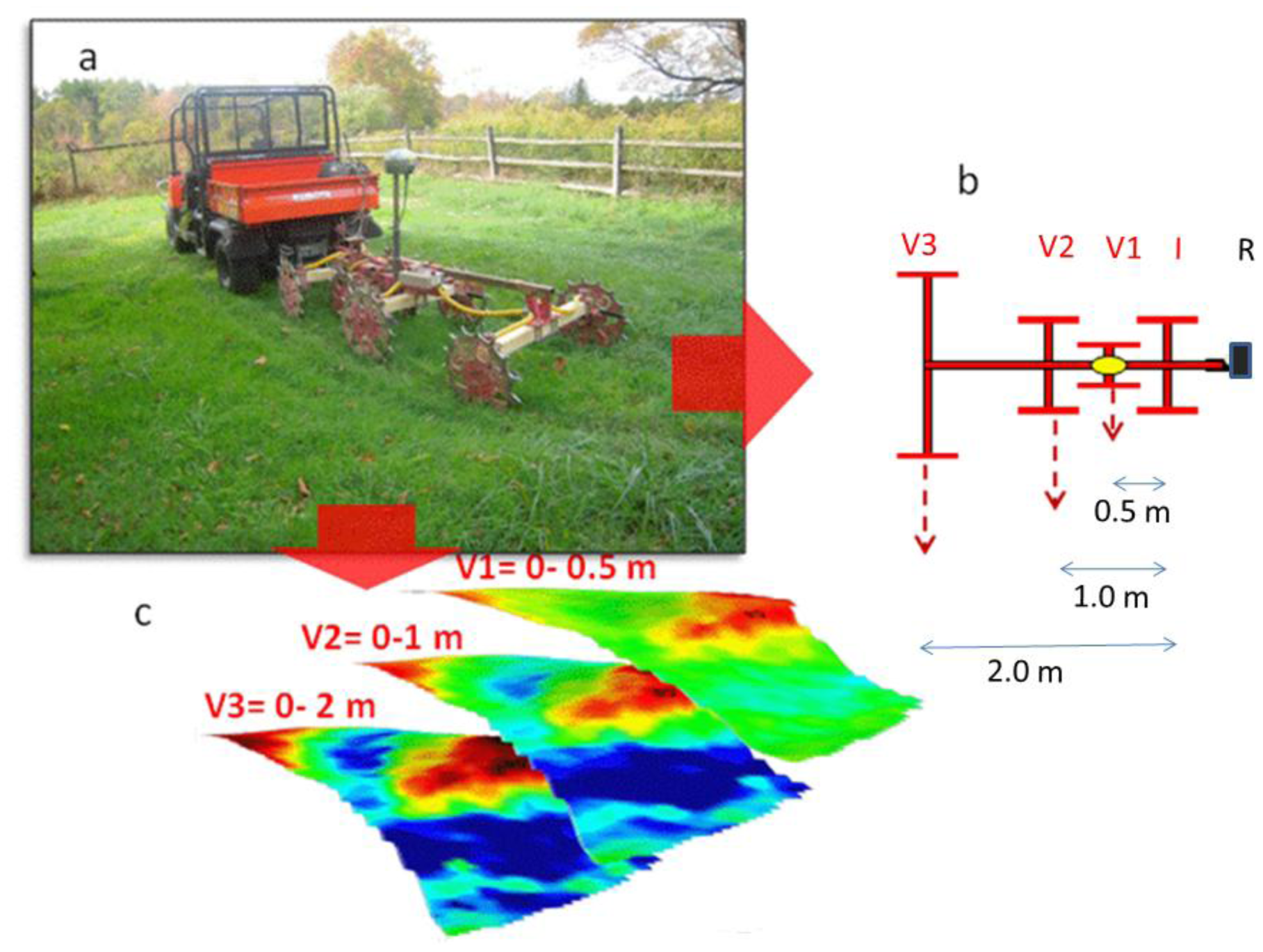
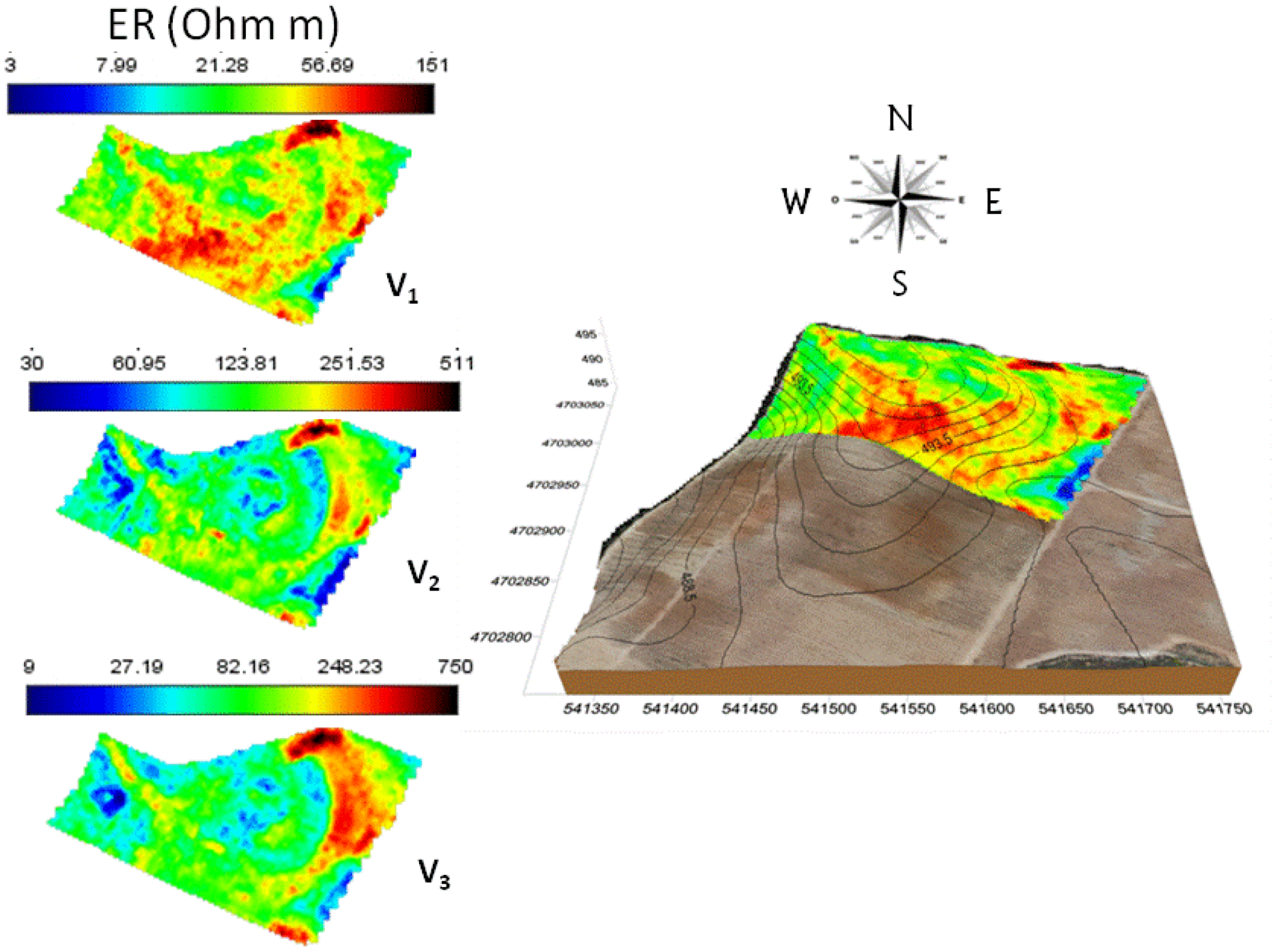
- A multipole made of four pairs of rolling electrodes arranged in V-shaped configuration specifically designed to optimize the acquired signal quality. One pair of rolling electrodes is used to inject current in the soil and the other three pairs function as receiving electrodes and areset at a distance of 0.5, 1 and 2 m from injecting electrode wheels (Figure 1(b)), in order to measure apparent soil electrical resistivity (ER) for a depth of investigation up to 0.5, 1 and 2 m respectively. Resulting measurements therefore respectively refer to the 0–0.5 m depth layer (V1), the 0–1.0 m depth layer (V2), and the 0–2.0 m depth layer (V3) (Figure 1(c)).
- -
- A resistivimeter, designed for optimized synchronous measurement of three channels with a quick time response (44 ms) and a high tolerance to contact resistance that allow high-speed measurements.
- -
- A Doppler radar to trigger the ER measurements at 20 cm intervals along each transect. A computer, to display and store the values of apparent electrical resistivity, which is equipped with a GIS software Geocarta Office (Geocarta, Paris, France), allowing data to be processed in real time.
- -
- An absolute positioning system (DGPS) for real-time data referencing.
2.3. Soil Resistivity Measurements
2.4. Grapevine Vigour and Crop Yield Measurements
2.5. Statistical, Geostatistical Analysis and Mapping
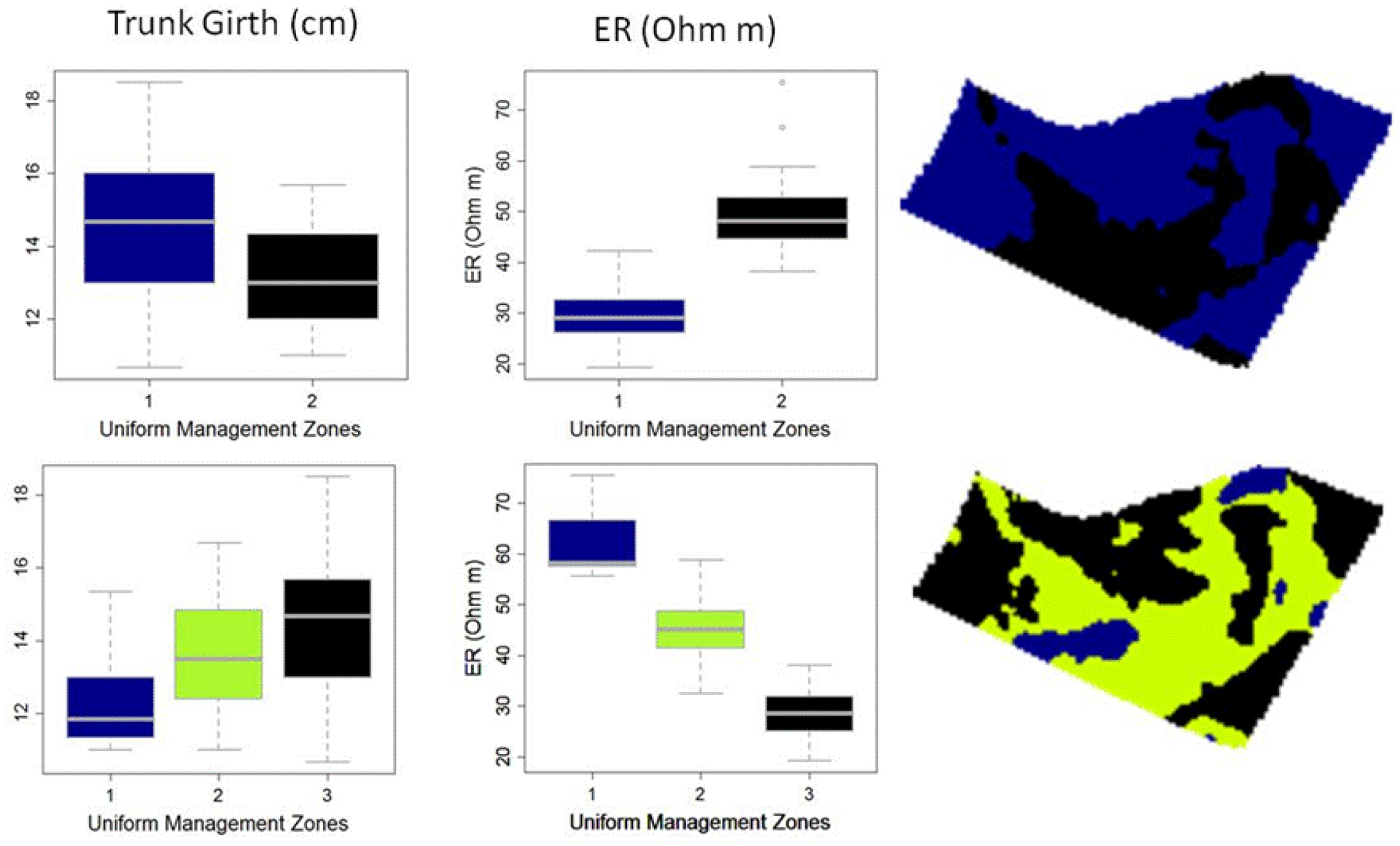
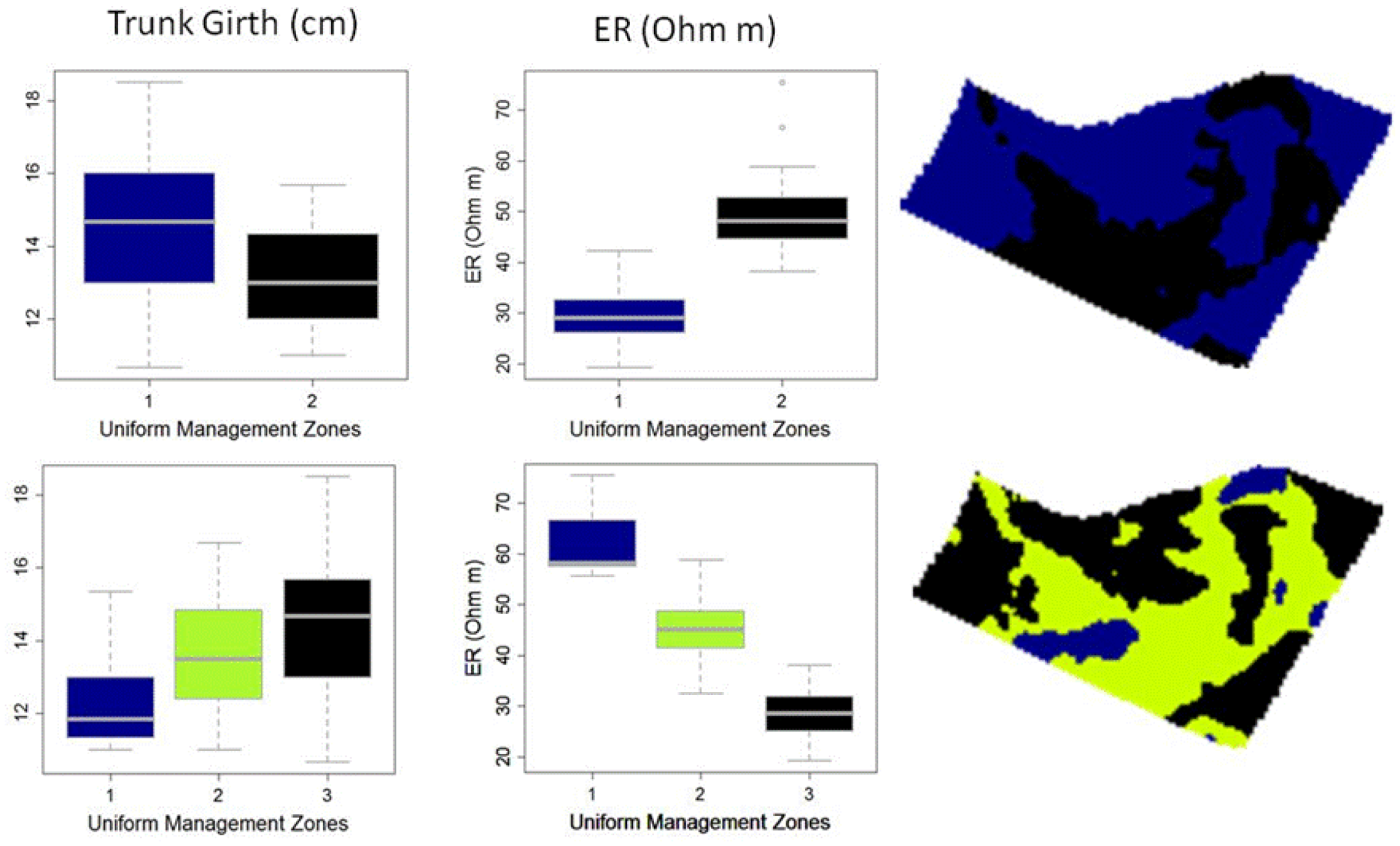
2.6. Delineation of Uniform Management Zones
3. Results and Discussion
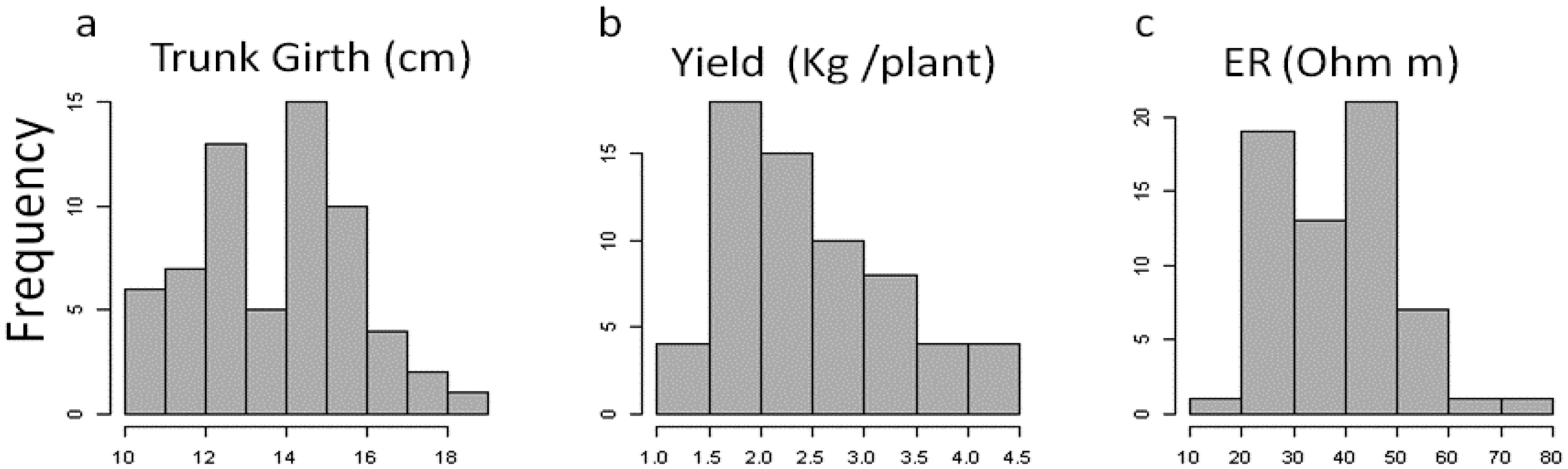
3.1. Gross Variation
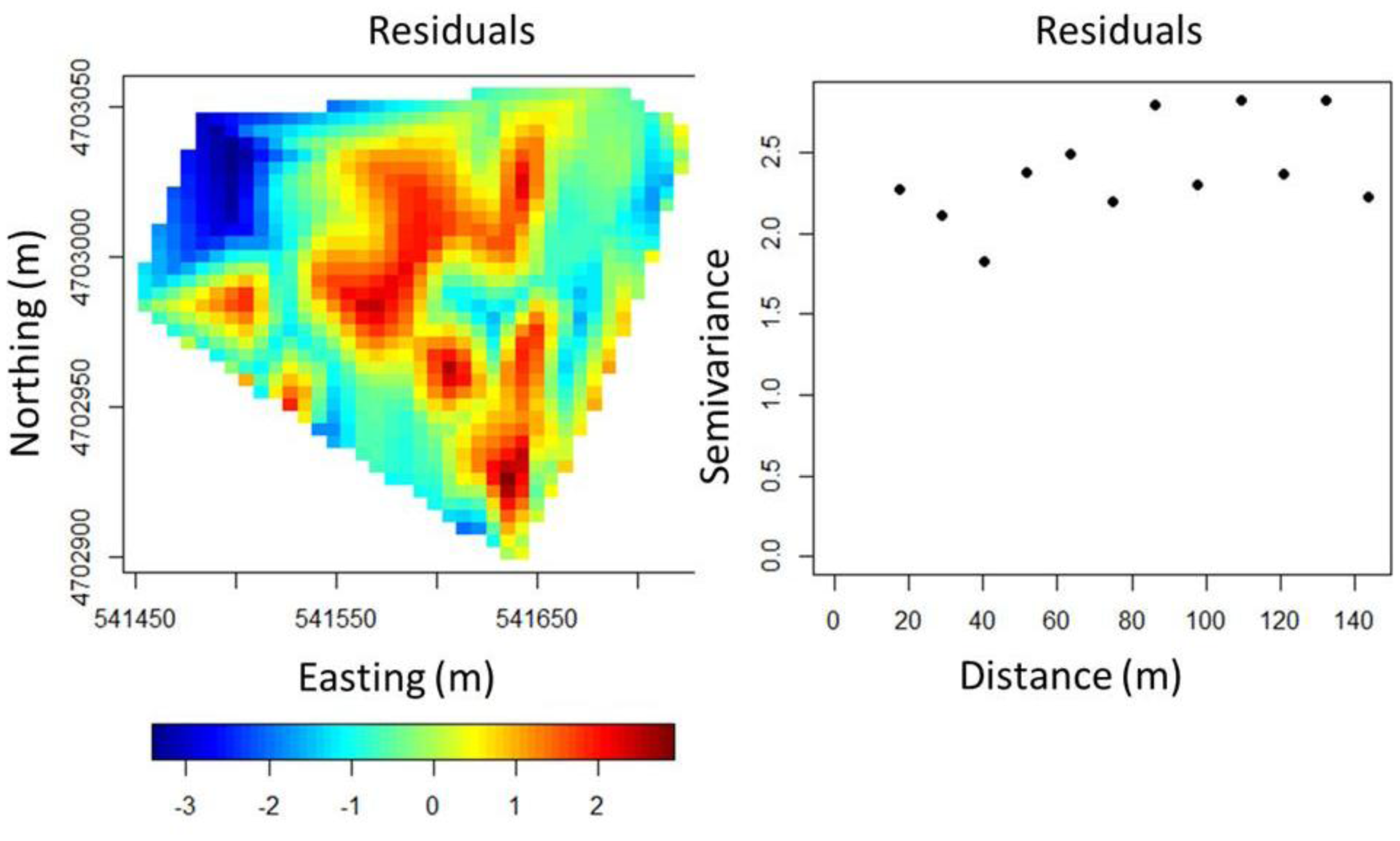
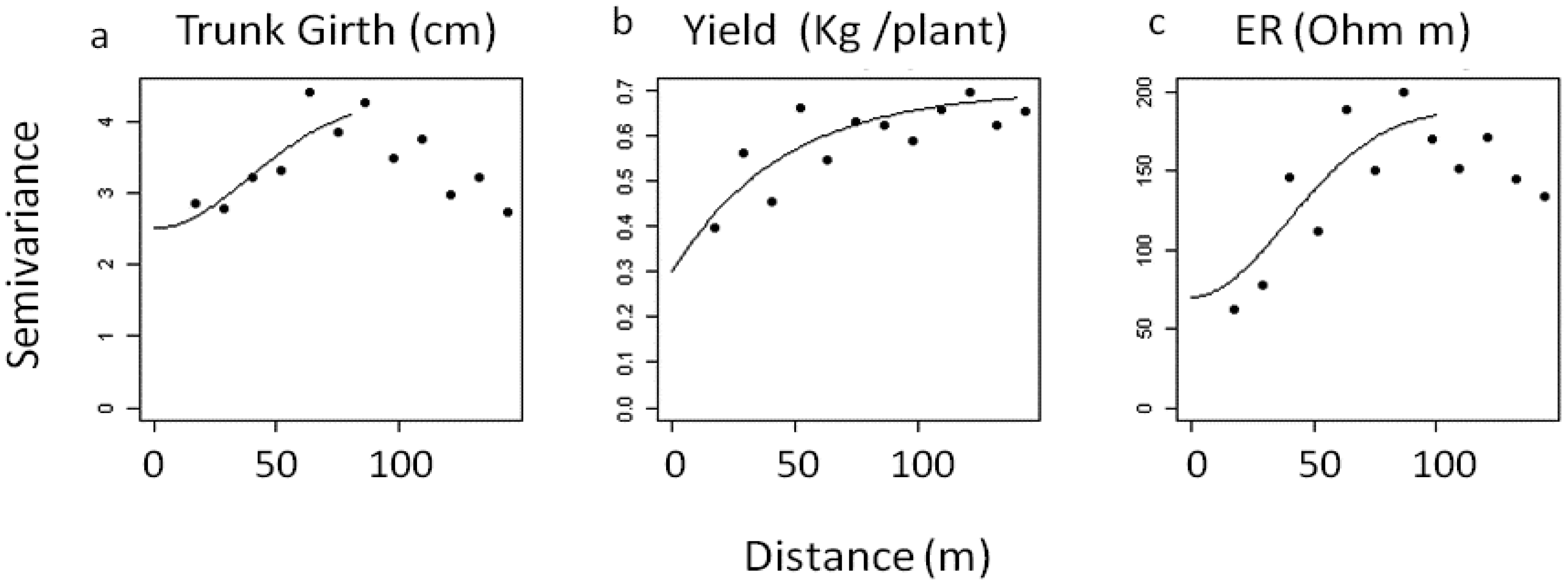
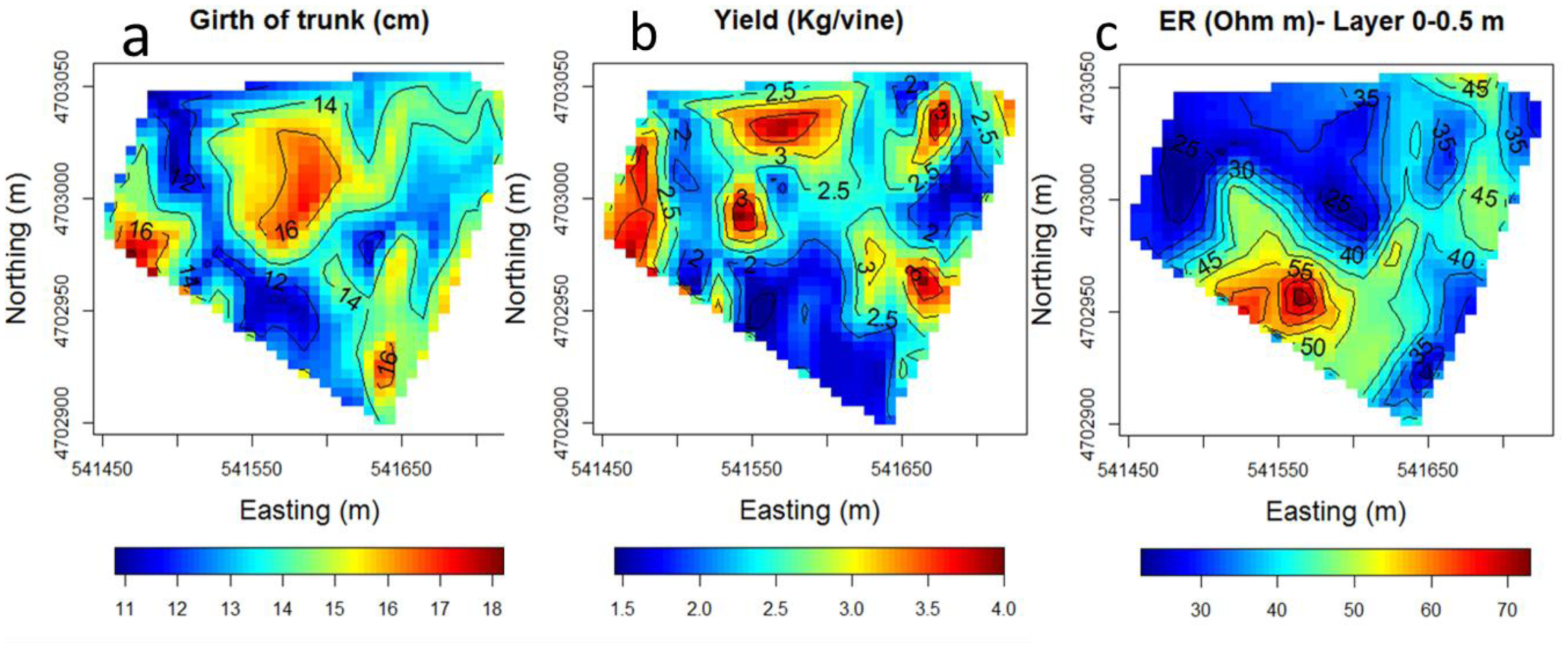
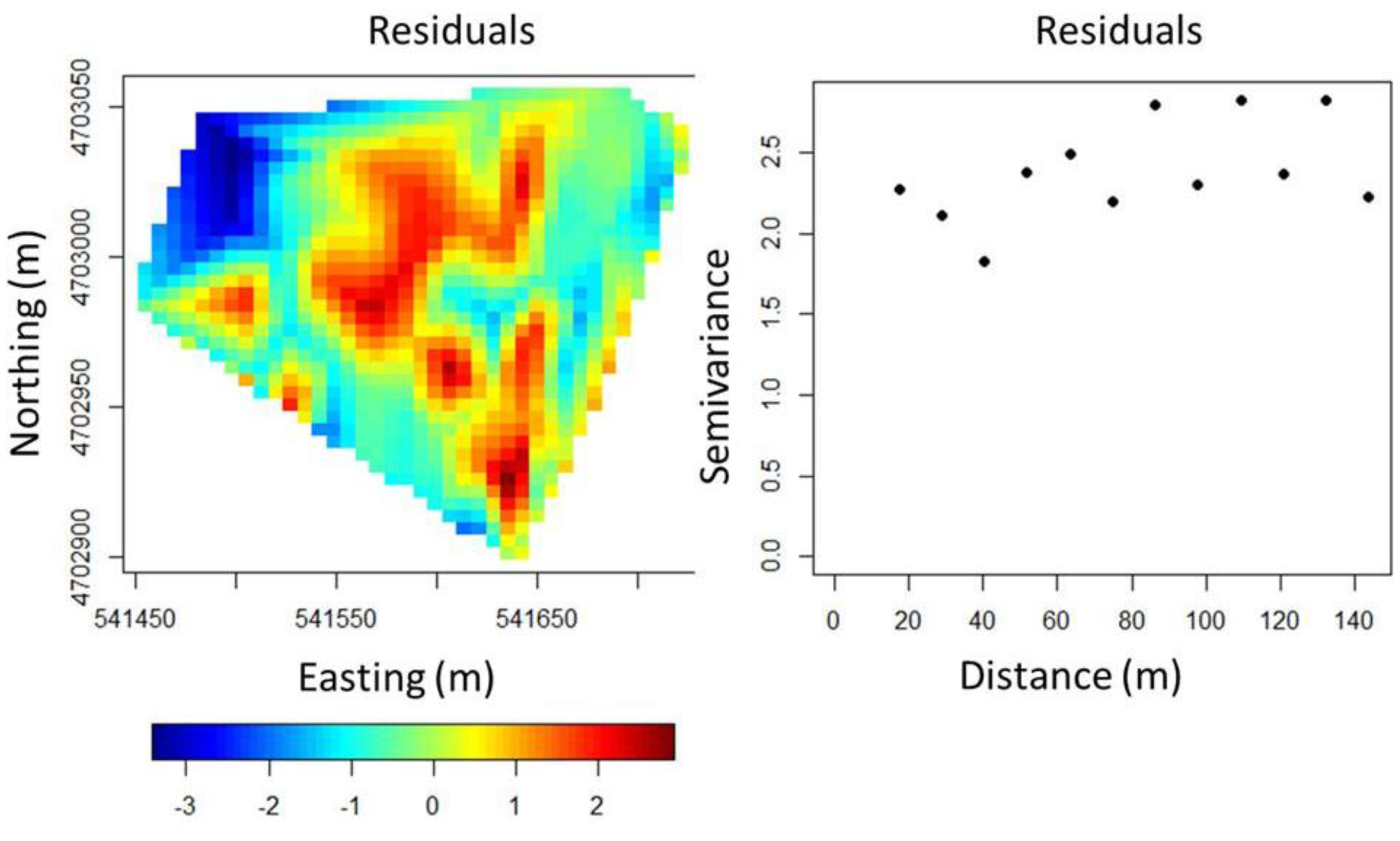
3.2. Spatial Variability and Geostatistical Analysis
4. Conclusions
Acknowledgments
References
- Dry, P.; Coombe, B. Viticulture; Winetitles: Adelaide, Australia, 2004; Volume 1. [Google Scholar]
- Proffit, T.; Bramley, R.G.V.; Lamb, D.; Winter, E. Precision Viticulture. A New Era in Vineyard Management and Wine Production; Winetitles: Adelaide, Australia, 2006. [Google Scholar]
- Bramley, R.G.V. Precision Viticulture: Managing vineyard variability for improved quality outcomes. In Understanding and Managing Wine Quality and Safety; Reynolds, A.G., Ed.; Woodhead Publishing: Cambridge, UK, 2010; pp. 445–480. [Google Scholar]
- Lesch, S.M. Sensor-directed response surface sampling designs for characterizing spatial variation in soil properties. Comput. Electr. Agric. 2005, 46, 153–179. [Google Scholar]
- Van Leeuwen, C. Terroir: The effect of the physical environment on the vine growth, grape ripening and wine sensory attributes. In Managing Wine Quality; Reynolds, A.G., Ed.; Woodhead Publishing: Cambridge, UK, 2010; Volume 1, pp. 273–315. [Google Scholar]
- Taylor, J.; Tisseyre, B.; Praat, J. Bottling Good Information: Mixing Tradition and Technology in vineyards. Proceedings of FRUTIC 05: Information and Technology for Sustainable Fruit and Vegetable Production, Montpellier, France, 12–16 September 2005; pp. 12–16.
- Tardaguila, J.; Baluja, J.; Arpon, L.; Balda, P.; Oliveira, M.T. Variations of soil properties affect the vegetative growth and yield components of Tempranillo grapevines. Prec. Agric. 2011, 12, 762–773. [Google Scholar]
- Baluja, J.; Diago, M.P.; Goovaerts, P.; Tardaguila, J. Assessment of the spatial variability of grape anthocyanins using a fluorescence sensor. Relationships with vine vigour and yield. Prec. Agric. 2012, 13, 457–472. [Google Scholar]
- Baluja, J.; Diago, M.P.; Goovaerts, P.; Tardaguila, J. Spatio-temporal dynamics of grape anthocyanin accumulation in a Tempranillo vineyard monitored by proximal sensing. Aust. J. Grape Wine Res. 2012, 18, 173–182. [Google Scholar]
- Bramley, R.G.V.; Ouzman, J.; Boss, P.K. Variation in vine vigour, grape yield and vineyard soils and topography as indicators of variation in the chemical composition of grapes, wine and wine sensory attributes. Aust. J. Grape Wine Res. 2011, 17, 217–229. [Google Scholar]
- Kerry, R.; Oliver, M.A. Variograms of Ancillary Data to Aid Sampling for Soil Surveys. Prec. Agric. 2003, 4, 261–278. [Google Scholar]
- Corwin, D.L.; Lesch, S.M.; Shouse, P.J.; Soppe, R.; Ayars, J.E. Identifying Soil Properties that Influence Cotton Yield Using Soil Sampling Directed by Apparent Soil Electrical Conductivity. Agron. J. 2003, 95, 352–364. [Google Scholar]
- Samouelian, A.; Cousin, I.; Tabbagh, A.; Bruand, A.; ; Richard, G. Electrical resistivity survey in soil science: A review. Soil Tillage Res. 2005, 83, 173–193. [Google Scholar]
- Besson, A.; Cousin, I.; Bourennane, H.; Nicoullaud, B.; Pasquier, C.; Richard, G.; Dorigny, A.; King, D. The spatial and temporal organization of soil water at the field scale as described by electrical resistivity measurements. Eur. J. Soil Sci. 2010, 61, 120–132. [Google Scholar]
- Corwin, D.L.; Lesch, S.M.; Oster, J.D.; Kaffka, S.R. Monitoring management-induced spatio–Temporal changes in soil quality through soil sampling directed by apparent electrical conductivity. Geoderma 2006, 131, 369–387. [Google Scholar]
- Besson, A.; Cousin, I.; Samouëlian, A.; Boizard, H.; Richard, G. Structural heterogeneity of the soil tilled layer as characterized by 2D electrical resistivity surveying. Soil Tillage Res. 2004, 79, 239–249. [Google Scholar]
- Basso, B.; Amato, M.; Bitella, G.; Rossi, R.; Kravchenko, A.; Sartori, L.; Carvalho, M.L.; Gomes, J. Two Dimensional Spatial and Temporal Variation of Soil Physical Properties in Tillage Systems Using Electrical Resistivity Tomography. Agron. J. 2010, 102, 440–449. [Google Scholar]
- Sudduth, K.; Kitchen, N.R.; Wiebold, W.J.; Batchelor, W.D.; Bollero, G.; Bullock, D.G.; Clay, D.E.; Palm, H.L.; Pierce, F.J.; Schuler, R.T.; Thelen, K.D. Relating apparent electrical conductivity to soil properties across the north-central USA. Comput. Electr. Agric. 2005, 46, 263–283. [Google Scholar]
- Kitchen, N.; Sudduth, K.; Myers, D.; Drummond, S.; Hong, S. Delineating productivity zones on claypan soil fields using apparent soil electrical conductivity. Comput. Electr. Agric. 2005, 46, 285–308. [Google Scholar]
- Moral, F.J.; Terrón, J.M.; Silva, J.R.M. Delineation of management zones using mobile measurements of soil apparent electrical conductivity and multivariate geostatistical techniques. Soil Tillage Res. 2010, 106, 335–343. [Google Scholar]
- Morari, F.; Castrignanò, A.; Pagliarin, C. Application of multivariate geostatistics in delineating management zones within a gravelly vineyard using geo-electrical sensors. Comput. Electr. Agric. 2009, 68, 97–107. [Google Scholar]
- Sudduth, K.A.; Kitchen, N.R.; Bollero, G.A.; Bullock, D.G.; Wiebold, W.J. Comparison of Electromagnetic Induction and Direct Sensing of Soil Electrical Conductivity. Agron. J. 2003, 482, 472–482. [Google Scholar]
- Dabas, M. Fundamentals of the ARP© system. Comparison with the EM approach Application to large scale arch. sites. In Seeing the Unseen. Geophysics and Landscape Archaeology, 1st ed.; Campana, S., Piro, S., Eds.; Taylor & Francis: London, UK, 2008; pp. 105–129. [Google Scholar]
- Lamb, D.W.; Mitchell, A.; Hyde, G. Evaluating the Impact of VSP Vine Trellising Comprising Steel Posts on EM-38 Apparent Conductivity Surveys. Austr. J. Grape Wine Res. 2005, 11, 24–32. [Google Scholar]
- André, F.; van Leeuwen, C.; Saussez, S.; Van Durmen, R.; Bogaert, P.; Moghadas, D.; de Rességuier, L.; Delvaux, B.; Vereecken, H.; Lambot, S. High-resolution imaging of a vineyard in south of France using ground-penetrating radar, electromagnetic induction and electrical resistivity tomography. J. Appl. Geophys. 2012, 78, 113–122. [Google Scholar]
- Dabas, M.; Cassassolles, X. Characterization of Soil Variability and Its Application to the Management of Vineyard (Arp System). 2002. Avaliable online: http://www.liendelavigne.org/ANG/RapportsANG/11–2002ANG/LDV_021122_Dabas_en.pdf (accessed on 14 January 2012).
- Soil Survey Staff. In Keys to Soil Taxonomy, 8th ed.; Soil Conservation Service/USDA/Pocahontas Press: Blacksburg, VA, USA, 2006.
- Arce, G.R. Nonlinear Signal Processing: A Statistical Approach; Wiley: Hoboken, NJ, USA, 2005. [Google Scholar]
- Fridgen, J.J.; Kitchen, N.R.; Sudduth, K.A.; Drummond, S.T.; Wiebold, W.J.; Fraisse, C.W. Management Zone Analyst (MZA): Software for subfield management zone delineation. Agron. J. 2004, 96, 100–108. [Google Scholar]
- Jaynes, D.B.; Colvin, T.S.; Kaspar, T.C. Identifying potential soybean management zones from multi-year yield data. Comput. Electr. Agric. 2005, 46, 309–327. [Google Scholar]
- Kitchen, N.R.; Drummond, S.T.; Lund, E.D.; Sudduth, K.A.; Buchleiter, G.W. Soil electrical conductivity and topography related to yield for three contrasting soil–crop systems. Agron. J. 2003, 95, 483–495. [Google Scholar]
- Kaspar, T.C.; Colvin, T.S.; Jaynes, D.B.; Karlen, D.L.; James, D.E.; Meek, D.W.; Pulido, D.; Butler, H. Relationship Between Six Years of Corn Yields and Terrain Attributes. Prec. Agric. 2003, 4, 87–101. [Google Scholar]
- Fraisse, C.W.; Sudduth, K.A.; Kitchen, N.R. Calibration of the Ceres-Maize model for simulating site-specific crop development and yield on claypan soils. Appl. Eng. Agric. 2001, 17, 547–556. [Google Scholar]
- Boydell, B.; McBratney, A.B. Identifying Potential Within-Field Management Zones from Cotton-Yield Estimates. Prec. Agric. 2002, 3, 9–23. [Google Scholar]
- Acevedo-Opazo, C.; Tisseyre, B.; Guillaume, S.; Ojeda, H. The potential of high spatial resolution information to define within-vineyard zones related to vine water status. Prec. Agric. 2008, 9, 285–302. [Google Scholar]
- Bramley, R.G.V.; Hamilton, R.P. Understanding variability in winegrape production systems Within vineyard variation in yield over several vintages. Austr. J. Grape Wine Res. 2004, 10, 32–45. [Google Scholar]
- Beresnev, I.A.; Hruby, C.E.; Davis, C.A. The use of multi-electrode resistivity imaging in gravel prospecting. J. Appl. Geophys. 2002, 49, 245–254. [Google Scholar]
- Zenone, T.; Morelli, G.; Teobaldelli, M.; Fischanger, F.; Matteucci, M.; Sordini, M.; Armani, A.; Ferrè, C.; Chiti, T.; Seufert, G. Preliminary use of ground-penetrating radar and electrical resistivity tomography to study tree roots in pine forests and poplar plantations. Funct. Plant Biol. 2007, 35, 1047–1058. [Google Scholar]
- Amato, M.; Bitella, G.; Rossi, R.; Gómez, J.A.; Lovelli, S.; Gomes, J.J.F. Multi-electrode 3D resistivity imaging of alfalfa root zone. Eur. J. Agron. 2009, 31, 213–222. [Google Scholar]
- Rey, E.; Jongmans, D.; Gotteland, P.; Garambois, S. Characterisation of soils with stony inclusions using geoelectricalmeasurements. J. Appl. Geophys. 2006, 58, 188–201. [Google Scholar]
- Rossi, R.; Amato, M.; Bitella, G.; Bochicchio, R.; Ferreira Gomes, J.J.; Lovelli, S.; Martorella, E.; Favale, P. Electrical resistivity tomography as a non-destructive method for mapping root biomass in an orchard. Eur. J. Soil Sci. 2010, 62, 206–215. [Google Scholar]
- Amato, M.; Basso, B.; Celano, G.; Bitella, G.; Morelli, G.; Rossi, R. In situ detection of tree root distribution and biomass by multielectrode resistivity imaging. Tree Physiol. 2008, 28, 1441–1448. [Google Scholar]
- Lesch, S.M.; Corwin, D.L.; Robinson, D.A. Apparent soil electrical conductivity mapping as an agricultural management tool in arid zone soils. Comput. Electr. Agric. 2005, 46, 351–378. [Google Scholar]
- Trought, M.C.T.; Dixon, R.; Mills, T.; Greven, M.; Agnew, R.; Mauk, J.L.; Praat, J.P. The impact of differences in soil texture within a vineyard on vine vigour, vine earliness and juice composition. J. Int. Sci. Vigne Vin. 2008, 42, 67–72. [Google Scholar]
- Li, Y.; Shi, Z.; Wu, C.F.; Li, H.; Li, F. Determination of potential management zones from soil electrical conductivity, yield and crop data. J. Zhejiang Univ. 2008, 9, 68–76. [Google Scholar]
- Fraisse, C.W.; Sudduth, K.A.; Kitchen, N.R. Delineation of site-specific management zones by unsupervised classification of topographic attributes and soil electrical conductivity. Trans. Am. Soc. Agric. Eng. 2001, 44, 155–166. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Rossi, R.; Pollice, A.; Diago, M.-P.; Oliveira, M.; Millan, B.; Bitella, G.; Amato, M.; Tardaguila, J. Using an Automatic Resistivity Profiler Soil Sensor On-The-Go in Precision Viticulture. Sensors 2013, 13, 1121-1136. https://doi.org/10.3390/s130101121
Rossi R, Pollice A, Diago M-P, Oliveira M, Millan B, Bitella G, Amato M, Tardaguila J. Using an Automatic Resistivity Profiler Soil Sensor On-The-Go in Precision Viticulture. Sensors. 2013; 13(1):1121-1136. https://doi.org/10.3390/s130101121
Chicago/Turabian StyleRossi, Roberta, Alessio Pollice, Maria-Paz Diago, Manuel Oliveira, Borja Millan, Giovanni Bitella, Mariana Amato, and Javier Tardaguila. 2013. "Using an Automatic Resistivity Profiler Soil Sensor On-The-Go in Precision Viticulture" Sensors 13, no. 1: 1121-1136. https://doi.org/10.3390/s130101121
APA StyleRossi, R., Pollice, A., Diago, M.-P., Oliveira, M., Millan, B., Bitella, G., Amato, M., & Tardaguila, J. (2013). Using an Automatic Resistivity Profiler Soil Sensor On-The-Go in Precision Viticulture. Sensors, 13(1), 1121-1136. https://doi.org/10.3390/s130101121