Detecting Driver Drowsiness Based on Sensors: A Review

Abstract
:
1. Introduction
- Vehicle-based measures—A number of metrics, including deviations from lane position, movement of the steering wheel, pressure on the acceleration pedal, etc., are constantly monitored and any change in these that crosses a specified threshold indicates a significantly increased probability that the driver is drowsy [5,6].
2. Defining Drowsiness
- Stage I: transition from awake to asleep (drowsy)
- Stage II: light sleep
- Stages III: deep sleep
- Occur late at night (0:00 am–7:00 am) or during mid-afternoon (2:00 pm–4:00 pm)
- Involve a single vehicle running off the road
- Occur on high-speed roadways
- Driver is often alone
- Driver is often a young male, 16 to 25 years old
- No skid marks or indication of braking
- Blood alcohol level below the legal driving limit
- Vehicle ran off the road or onto the back of another vehicle
- No sign of brakes being applied
- Vehicle has no mechanical defect
- Good weather conditions and clear visibility
- Elimination of “speeding” or “driving too close to the vehicle in front” as potential causes
- The police officer at the scene suspects sleepiness as the primary cause
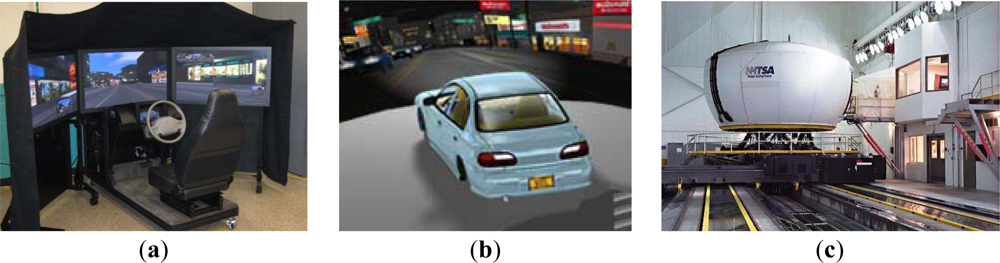
3. Simulated Environment for Drowsiness Manipulation
4. Drowsiness Manipulation for Study Purposes
5. Methods for Measuring Drowsiness
5.1. Subjective Measures
5.2. Vehicle-Based Measures
5.3. Behavioral Measures
5.4. Physiological Measures
6. Discussion
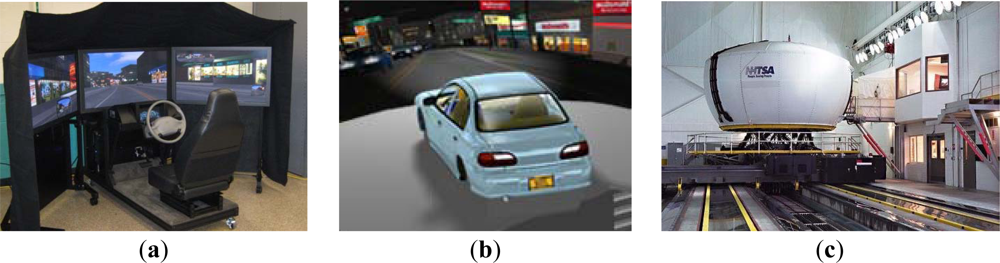
6.1. Comparison of Simulated and Real Driving Conditions
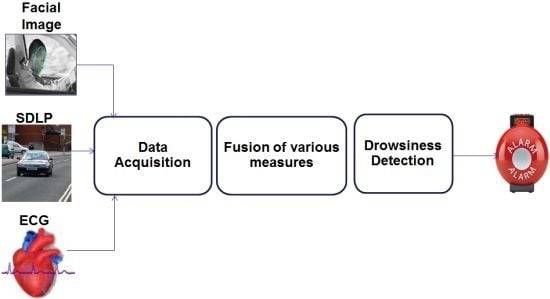
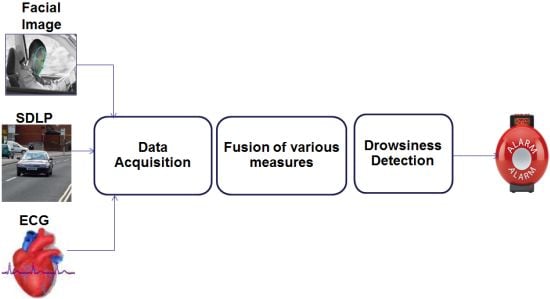
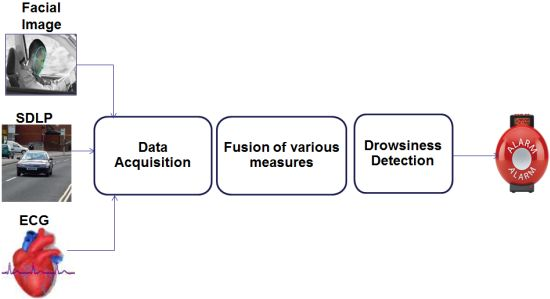
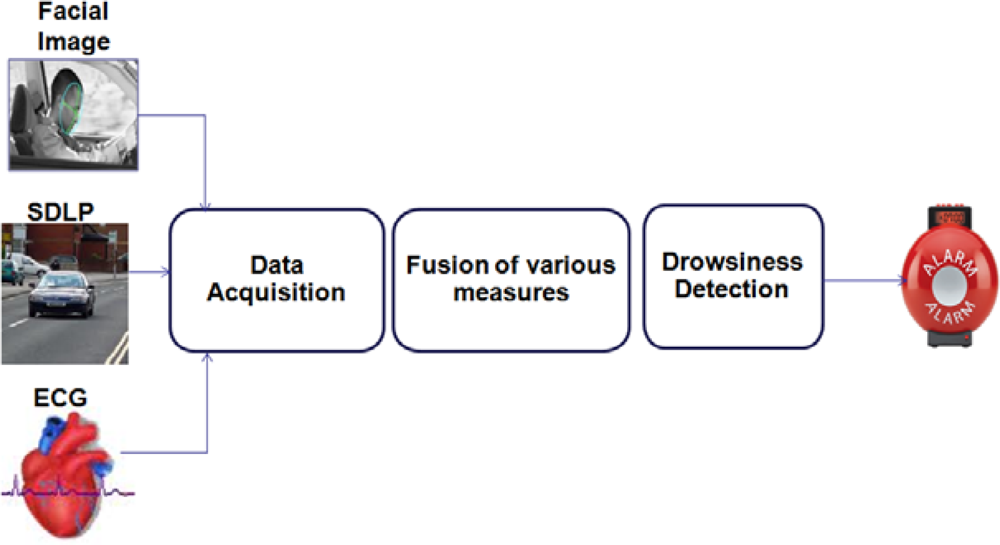
6.2. Hybrid Measures
7. Conclusions
References
- Global Status Report on Road Safety 2009; World Health Organisation (WHO): Geneva, Switzerland, 2009.
- Rau, P. Drowsy Driver Detection and Warning System for Commercial Vehicle Drivers: Field Operational Test Design, Analysis, and Progress; National Highway Traffic Safety Administration: Washington, DC, USA, 2005. [Google Scholar]
- Drivers Beware Getting Enough Sleep Can Save Your Life This Memorial Day; National Sleep Foundation (NSF): Arlington, VA, USA, 2010.
- Husar, P. Eyetracker Warns against Momentary Driver Drowsiness. Available online: http://www.fraunhofer.de/en/press/research-news/2010/10/eye-tracker-driver-drowsiness.html (accessed on 27 July 2012).
- Liu, C.C.; Hosking, S.G.; Lenné, M.G. Predicting driver drowsiness using vehicle measures: Recent insights and future challenges. J. Saf. Res 2009, 40, 239–245. [Google Scholar]
- Forsman, P.M.; Vila, B.J.; Short, R.A.; Mott, C.G.; van Dongen, H.P.A. Efficient driver drowsiness detection at moderate levels of drowsiness. Accid. Anal. Prevent. 2012, in press.. [Google Scholar]
- Xiao, F.; Bao, C.Y.; Yan, F.S. Yawning detection based on gabor wavelets and LDA. J. Beijing Univ. Technol 2009, 35, 409–413. [Google Scholar]
- Zhang, Z.; Zhang, J. A new real-time eye tracking based on nonlinear unscented Kalman filter for monitoring driver fatigue. J. Contr. Theor. Appl 2010, 8, 181–188. [Google Scholar]
- Yin, B.-C.; Fan, X.; Sun, Y.-F. Multiscale dynamic features based driver fatigue detection. Int. J. Pattern Recogn. Artif. Intell 2009, 23, 575–589. [Google Scholar]
- Akin, M.; Kurt, M.; Sezgin, N.; Bayram, M. Estimating vigilance level by using EEG and EMG signals. Neural Comput. Appl 2008, 17, 227–236. [Google Scholar]
- Kokonozi, A.K.; Michail, E.M.; Chouvarda, I.C.; Maglaveras, N.M. A Study of Heart Rate and Brain System Complexity and Their Interaction in Sleep-Deprived Subjects. Proceedings of the Conference Computers in Cardiology, Bologna, Italy, 14–17 September 2008; pp. 969–971.
- Khushaba, R.N.; Kodagoda, S.; Lal, S.; Dissanayake, G. Driver drowsiness classification using fuzzy wavelet-packet-based feature-extraction algorithm. IEEE Trans. Biomed. Eng 2011, 58, 121–131. [Google Scholar]
- Liang, W.; Yuan, J.; Sun, D.; Lin, M. Changes in physiological parameters induced by indoor simulated driving: Effect of lower body exercise at mid-term break. Sensors 2009, 9, 6913–6933. [Google Scholar]
- Guosheng, Y.; Yingzi, L.; Prabir, B. A driver fatigue recognition model based on information fusion and dynamic Bayesian network. Inform. Sci 2010, 180, 1942–1954. [Google Scholar]
- Philip, P.; Sagaspe, P.; Moore, N.; Taillard, J.; Charles, A.; Guilleminault, C.; Bioulac, B. Fatigue, sleep restriction and driving performance. Accid. Anal. Prevent 2005, 37, 473–478. [Google Scholar]
- Tremaine, R.; Dorrian, J.; Lack, L.; Lovato, N.; Ferguson, S.; Zhou, X.; Roach, G. The relationship between subjective and objective sleepiness and performance during a simulated night-shift with a nap countermeasure. Appl. Ergon 2010, 42, 52–61. [Google Scholar]
- Brodbeck, V.; Kuhn, A.; von Wegner, F.; Morzelewski, A.; Tagliazucchi, E.; Borisov, S.; Michel, C.M.; Laufs, H. EEG microstates of wakefulness and NREM sleep. NeuroImage 2012, 62, 2129–2139. [Google Scholar]
- Drowsy Driving and Automobile Crashes; National Center on Sleep Disorder Research and the National Highway Traffic Safety Administration: Howe, TX, USA, 1998.
- Rosey, F.; Auberlet, J.-M.; Moisan, O.; Dupre, G. Impact of narrower lane width: Comparison between fixed-base simulator and real data. Transport. Res. Rec. J. Transport. Res. Board 2009, 2138, 112–119. [Google Scholar]
- Konstantopoulos, P.; Chapman, P.; Crundall, D. Driver’s visual attention as a function of driving experience and visibility. Using a driving simulator to explore drivers’ eye movements in day, night and rain driving. Accid. Anal. Prevent 2010, 42, 827–834. [Google Scholar]
- Kaptein, N.; Theeuwes, J.; van der Horst, R. Driving simulator validity: Some considerations. Transport. Res. Rec. J. Transport. Res. Board 1996, 1550, 30–36. [Google Scholar]
- Bella, F. Driver perception of roadside configurations on two-lane rural roads: Effects on speed and lateral placement. Accid. Anal. Prevent. 2012, in press.. [Google Scholar]
- Auberlet, J.-M.; Rosey, F.; Anceaux, F.; Aubin, S.; Briand, P.; Pacaux, M.-P.; Plainchault, P. The impact of perceptual treatments on driver’s behavior: From driving simulator studies to field tests—First results. Accid. Anal. Prevent 2012, 45, 91–98. [Google Scholar]
- Johnson, M.J.; Chahal, T.; Stinchcombe, A.; Mullen, N.; Weaver, B.; Bédard, M. Physiological responses to simulated and on-road driving. Int. J. Psychophysiol 2011, 81, 203–208. [Google Scholar]
- Mayhew, D.R.; Simpson, H.M.; Wood, K.M.; Lonero, L.; Clinton, K.M.; Johnson, A.G. On-road and simulated driving: Concurrent and discriminant validation. J. Safety Res 2011, 42, 267–275. [Google Scholar]
- Ingre, M.; ÅKerstedt, T.; Peters, B.; Anund, A.; Kecklund, G. Subjective sleepiness, simulated driving performance and blink duration: Examining individual differences. J. Sleep Res 2006, 15, 47–53. [Google Scholar]
- Vitaterna, M.H.; Takahashi, J.S.; Turek, F.W. Overview of circadian rhythms. Alcohol Res. Health 2001, 25, 85–93. [Google Scholar]
- Hu, S.; Zheng, G. Driver drowsiness detection with eyelid related parameters by support vector machine. Exp. Syst. Appl 2009, 36, 7651–7658. [Google Scholar]
- Peters, R.D.; Wagner, E.; Alicandri, E.; Fox, J.E.; Thomas, M.L.; Thorne, D.R.; Sing, H.C.; Balwinski, S.M. Effects of partial and total sleep deprivation on driving performance. Publ. Road 1999, 62, 2–6. [Google Scholar]
- Lal, S.K.L.; Craig, A. A critical review of the psychophysiology of driver fatigue. Biol. Psychol 2001, 55, 173–194. [Google Scholar]
- Horne, J.; Reyner, L. Vehicle accidents related to sleep: A review. Occup. Environ. Med 1999, 56, 289–294. [Google Scholar]
- Otmani, S.; Pebayle, T.; Roge, J.; Muzet, A. Effect of driving duration and partial sleep deprivation on subsequent alertness and performance of car drivers. Physiol. Behav 2005, 84, 715–724. [Google Scholar]
- Thiffault, P.; Bergeron, J. Monotony of road environment and driver fatigue: A simulator study. Accid. Anal. Prevent 2003, 35, 381–391. [Google Scholar]
- Portouli, E.; Bekiaris, E.; Papakostopoulos, V.; Maglaveras, N. On-road experiment for collecting driving behavioural data of sleepy drivers. Somnology 2007, 11, 259–267. [Google Scholar]
- Sommer, D.; Golz, M.; Trutschel, U.; Edwards, D. Biosignal based discrimination between slight and strong driver hypovigilance by support-vector machines. In Agents and Artificial Intelligence; Springer: Berlin, Germany, 2010; Volume 67, pp. 177–187. [Google Scholar]
- Fairclough, S.H.; Graham, R. Impairment of driving performance caused by sleep deprivation or alcohol: A comparative study. J. Hum. Factors Ergon 1999, 41, 118–128. [Google Scholar]
- Ruijia, F.; Guangyuan, Z.; Bo, C. An on-Board System for Detecting Driver Drowsiness Based on Multi-Sensor Data Fusion Using Dempster-Shafer Theory. Proceedings of the International Conference on Networking, Sensing and Control, Okayama, Japan, 26–29 March 2009; pp. 897–902.
- Vural, E. Video Based Detection of Driver Fatigue. Sabanci University, Istanbul, Turkey, 2009. [Google Scholar]
- Simons, R.; Martens, M.; Ramaekers, J.; Krul, A.; Klöpping-Ketelaars, I.; Skopp, G. Effects of dexamphetamine with and without alcohol on simulated driving. Psychopharmacology 2012, 222, 391–399. [Google Scholar]
- Das, D.; Zhou, S.; Lee, J.D. Differentiating alcohol-induced driving behavior using steering wheel signals. IEEE Trans. Intell. Transport. Syst 2012, 13, 1355–1368. [Google Scholar]
- Mets, M.A.J.; Kuipers, E.; de Senerpont Domis, L.M.; Leenders, M.; Olivier, B.; Verster, J.C. Effects of alcohol on highway driving in the STISIM driving simulator. Hum. Psychopharm 2011, 26, 434–439. [Google Scholar]
- Lew, M.; Sebe, N.; Huang, T.; Bakker, E.; Vural, E.; Cetin, M.; Ercil, A.; Littlewort, G.; Bartlett, M.; Movellan, J. Drowsy driver detection through facial movement analysis. In Human-Computer Interaction; Springer: Berlin, Germany, 2007; Volume 4796, pp. 6–18. [Google Scholar]
- Bergasa, L.M.; Nuevo, J.; Sotelo, M.A.; Barea, R.; Lopez, M.E. Real-time system for monitoring driver vigilance. IEEE Trans. Intell. Transport. Syst 2006, 7, 63–77. [Google Scholar]
- D’Orazio, T.; Leo, M.; Guaragnella, C.; Distante, A. A visual approach for driver inattention detection. Pattern Recog 2007, 40, 2341–2355. [Google Scholar]
- Dang, H.L.; Peng, S.; Yan, Q.X.; Yun, X.Y. Drowsiness Detection Based on Eyelid Movement. Proceedings of the 2nd International Workshop on Education Technology and Computer Science, Wuhan, China, 12–13 March 2010; pp. 49–52.
- Dinges, D.F.; Mallis, M.M.; Maislin, G.; Powell, J.W. Final Report: Evaluation of Techniques for Ocular Measurement as an Index of Fatigue and as the Basis for Alertness Management; Report for NHTSA: Washington, DC, USA, 1998. [Google Scholar]
- Abe, T.; Nonomura, T.; Komada, Y.; Asaoka, S.; Sasai, T.; Ueno, A.; Inoue, Y. Detecting deteriorated vigilance using percentage of eyelid closure time during behavioral maintenance of wakefulness tests. Int. J. Psychophysiol 2011, 82, 269–274. [Google Scholar]
- McKinley, R.A.; McIntire, L.K.; Schmidt, R.; Repperger, D.W.; Caldwell, J.A. Evaluation of eye metrics as a detector of fatigue. Hum. Factors 2011, 53, 403–414. [Google Scholar]
- Seeingmachines Driver State Sensor. Available online: http://www.seeingmachines.com/product/dss/ (accessed on 21 November 2012).
- Lexus, L.X. Driver Monitoring System. Available online: http://www.lexus.eu/range/ls/key-features/safety/safety-driver-monitoring-system.aspx (accessed on 21 November 2012).
- Smith, P.; Shah, M.; Vitoria, L.N. Determining driver visual attention with one camera. IEEE Trans. Intell. Transport. Syst 2003, 4, 205–218. [Google Scholar]
- Murphy-Chutorian, E.; Trivedi, M.M. Head pose estimation and augmented reality tracking: An integrated system and evaluation for monitoring driver awareness. IEEE Trans. Intell. Transp. Syst 2010, 11, 300–311. [Google Scholar]
- Xue, T.Z.; Nan, N.Z.; Fan, M.; Yong, J.H. Head Pose Estimation Using Isophote Features for Driver Assistance Systems. Proceedins of the IEEE Intelligent Vehicles Symposium, Xi’an, China, 3–5 June 2009; pp. 568–572.
- Hartley, L.; Horberry, T.; Mabbott, N.; Krueger, G. Review of Fatigue Detection and Prediction Technologies; National Road Transport Commission: Melbourne, Australia, 2000. [Google Scholar]
- Shen, W.; Sun, H.; Cheng, E.; Zhu, Q.; Li, Q. Effective driver fatigue monitoring through pupil detection and yawing analysis in low light level environments. Int. J. Digit. Technol. Appl 2012, 6, 372–383. [Google Scholar]
- Flores, M.; Armingol, J.; de la Escalera, A. Driver drowsiness warning system using visual information for both diurnal and nocturnal illumination conditions. EURASIP J. Adv. Signal Process 2010, 2010, 438205. [Google Scholar]
- Golz, M.; Sommer, D.; Trutschel, U.; Sirois, B.; Edwards, D. Evaluation of fatigue monitoring technologies. Somnology 2010, 14, 187–199. [Google Scholar]
- Patel, M.; Lal, S.K.L.; Kavanagh, D.; Rossiter, P. Applying neural network analysis on heart rate variability data to assess driver fatigue. Exp. Syst. Appl 2011, 38, 7235–7242. [Google Scholar]
- Fu, C.L.; Li, W.K.; Chun, H.C.; Tung, P.S.; Chin, T.L. Generalized EEG-based drowsiness prediction system by using a self-organizing neural fuzzy system. IEEE Trans. Circ. Syst 2012, 59, 2044–2055. [Google Scholar]
- Chin, T.L.; Che, J.C.; Bor, S.L.; Shao, H.H.; Chih, F.C.; Wang, I.J. A real-time wireless brain-computer interface system for drowsiness detection. IEEE Trans. Biomed. Circ. Syst 2010, 4, 214–222. [Google Scholar]
- Kurt, M.B.; Sezgin, N.; Akin, M.; Kirbas, G.; Bayram, M. The ANN-based computing of drowsy level. Exp. Syst. Appl 2009, 36, 2534–2542. [Google Scholar]
- Liu, J.; Zhang, C.; Zheng, C. EEG-based estimation of mental fatigue by using KPCA-HMM and complexity parameters. Biomed. Signal Process. Contr 2010, 5, 124–130. [Google Scholar]
- Miyaji, M.; Kawanaka, H.; Oguri, K. Driver’s Cognitive Distraction Detection Using Physiological Features by the Adaboost. Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 3–7 October 2009; pp. 1–6.
- Michail, E.; Kokonozi, A.; Chouvarda, I.; Maglaveras, N. EEG and HRV Markers of Sleepiness and Loss of Control during Car Driving. Proceedings of the 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008; pp. 2566–2569.
- Kobayashi, H. EMG/ECG acquisition system with online adjustable parameters using zigbee wireless technology. IEEE Trans. Electron. Inform. Syst 2012, 132, 632–639. [Google Scholar]
- Klingeberg, T.; Schilling, M. Mobile wearable device for long term monitoring of vital signs. Comput. Meth. Prog. Biomed 2012, 106, 89–96. [Google Scholar]
- Yu, X. Real-Time Nonintrusive Detection of Driver Drowsiness; Technical Report for University of Minnesota: Minneapolis, MN, USA, 2009. [Google Scholar]
- Gomez-Clapers, J.; Casanella, R. A fast and easy-to-use ECG acquisition and heart rate monitoring system using a wireless steering wheel. IEEE Sens. J 2012, 12, 610–616. [Google Scholar]
- Hyun, J.B.; Gih, S.C.; Ko, K.K.; Kwang, S.P. A Smart health monitoring chair for nonintrusive measurement of biological signals. IEEE Trans. Inform. Technol. Biomed 2012, 16, 150–158. [Google Scholar]
- Lee, B.-G.; Chung, W.-Y. Multi-classifier for highly reliable driver drowsiness detection in Android platform. Biomed. Eng. Appl. Basis Commun 2012, 24, 147–154. [Google Scholar]
- Hii, P.; Chung, W. A comprehensive ubiquitous healthcare solution on an Android™ mobile device. Sensors 2011, 11, 6799–6815. [Google Scholar]
- Blana, E.; Golias, J. Differences between vehicle lateral displacement on the road and in a fixed-base simulator. Hum. Factors 2002, 44, 303–313. [Google Scholar]
- Engström, J.; Johansson, E.; Östlund, J. Effects of visual and cognitive load in real and simulated motorway driving. Transport. Res. Traffic Psychol. Behav 2005, 8, 97–120. [Google Scholar]
- Lawrence, B.; Stephen, P.; Howarth, H. An Evaluation of Emerging Driver Fatigue Detection Measures and Technologies; Volpe National Transportation Systems Center Cambridge: Cambridge, UK, 2009. [Google Scholar]
- Sloten, J.; Verdonck, P.; Nyssen, M.; Haueisen, J.; Mizuno, A.; Okumura, H.; Matsumura, M. Development of Neckband Mounted Active Bio-Electrodes for Non-Restraint Lead Method of ECG R Wave. Proceedings of the 4th European Conference of the International Federation for Medical and Biological Engineering, Antwerp, Belgium, 23–27 November 2008; pp. 1394–1397.
- Lee, B.G.; Jung, S.J.; Chung, W.Y. Real-time physiological and vision monitoring of vehicle driver for non-intrusive drowsiness detection. Commun. IET 2011, 5, 2461–2469. [Google Scholar]
- De Rosario, H.; Solaz, J.S.; Rodri, X.; Guez, N.; Bergasa, L.M. Controlled inducement and measurement of drowsiness in a driving simulator. Intell. Trans. Syst. IET 2010, 4, 280–288. [Google Scholar]
- Cheng, B.; Zhang, W.; Lin, Y.; Feng, R.; Zhang, X. Driver drowsiness detection based on multisource information. Hum. Factors Ergon. Manuf. Serv. Indust 2012, 22, 450–467. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rating | Verbal descriptions |
|---|---|
| 1 | Extremely alert |
| 2 | Very alert |
| 3 | Alert |
| 4 | Fairly alert |
| 5 | Neither alert nor sleepy |
| 6 | Some signs of sleepiness |
| 7 | Sleepy, but no effort to keep alert |
| 8 | Sleepy, some effort to keep alert |
| 9 | Very sleepy, great effort to keep alert, fighting sleep |
| Ref. | Sensor used | Drowsiness Measure | Detection techniques | Feature Extraction | Classification | Positive Detection rate |
|---|---|---|---|---|---|---|
| [55] | CCD micro camera with Infra-Red Illuminator | Pupil | Ada-boost | Red eye effect, Texture detection method | Ratio of eye-height and eye-width | 92% |
| [43] | Camera and Infra-Red Illuminator | PERCLOS, eye closure duration, blink frequency, and 3 other | Two Kalman filters for pupil detection | Modification of the algebraic distance algorithm for conics Approximation & Finite State Machine | Fuzzy Classifier | Close to 100% |
| [7] | CCD camera | Yawning | Gravity-center template and grey projection | Gabor wavelets | LDA | 91.97% |
| [42] | Digital Video camera | Facial action | Gabor filter | Wavelet Decomposition | SVM | 96% |
| [44] | Fire wire camera and webcam | Eye Closure Duration & Freq of eye closure | Hough Transform | Discrete Wavelet Transform | Neural Classifier | 95% |
| [9] | Camera | Multi Scale dynamic features | Gabor filter | Local Binary Pattern | Ada boost | 98.33% |
| [56] | IR Camera | Eye State | Gabor filter | Condensation algorithm | SVM | 93% |
| [45] | Simple Camera | Eye blink | Cascaded Classifiers Algorithm detects face and Diamond searching lgorithm to trace the face | Duration of eyelid closure, No. of continuous blinks, Frequency of eye blink | Region Mark Algorithm | 98% |
| [8] | Camera with IR Illuminator | PERCLOS | Haar Algorithm to detect face | Unscented Kalman filter algorithm | SVM | 99% |
| Ref. | Sensors | Preprocessing | Feature Extraction | Classification | Classification accuracy (%) |
|---|---|---|---|---|---|
| [12] | EEG, ECG, EoG | Optimal Wavelet Packet, Fuzzy Wavelet Packet | The Fuzzy MI-based Wavelet-Packet Algorithm | LDA, LIBLINEAR, KNN, SVM | 95–97% (31 drivers) |
| [58] | ECG | Band Pass Filter | Fast Fourier Transform (FFT) | Neural Network | 90% (12 drivers) |
| [59] | EEG | Independent Component Analysis Decomposition | Fast Fourier Transform | Self-organizing Neural Fuzzy Inference Network | 96.7% (6 drivers) |
| [10] | EEG, EMG | Band Pass Filter & Visual Inspection | Discrete Wavelet Transform (DWT) | Artificial Neural Network (ANN) Back Propogation Algorithm (Awake, Drowsy, Sleep) | 98–99% (30 subjects) |
| [60] | EEG | Low pass filter 32 Hz | 512 point Fast Fourier Transform with 448 point overlap | Mahalanobis distance | 88.7% (10 subjects) |
| [28] | EoG, EMG | Filtering & Thresholding | Neighborhood search | SVM | 90% (37 subjects) |
| [61] | EEG, EoG, EMG | Low pass pre Filter and Visual Inspection | Discrete Wavelet Transform | ANN | 97–98% (10 subjects) |
| [62] | EEG | Least mean square algorithm and Visual Inspection | Wavelet packet analysis with Daubechies 10 as mother wavelet | Hidden Markov Model | 84% (50 subjects) |
| Refs. | Measures | Parameters | Advantages | Limitations |
|---|---|---|---|---|
| [26,35] | Subjective measures | Questionnaire | Subjective | Not possible in real time |
| [5,72] | Vehicle based measures | Deviation from the lane position Loss of control over the steering wheel movements | Nonintrusive | Unreliable |
| [15,54] | Behavioral Measures | Yawning Eye closure Eye blink Head pose | Non-intrusive; Ease of use | Lighting condition Background |
| [67,69] | Physiological measures | Statistical & energy features derived from ECG EoG EEG | Reliable; Accurate | Intrusive |
© 2012 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Sahayadhas, A.; Sundaraj, K.; Murugappan, M. Detecting Driver Drowsiness Based on Sensors: A Review. Sensors 2012, 12, 16937-16953. https://doi.org/10.3390/s121216937
Sahayadhas A, Sundaraj K, Murugappan M. Detecting Driver Drowsiness Based on Sensors: A Review. Sensors. 2012; 12(12):16937-16953. https://doi.org/10.3390/s121216937
Chicago/Turabian StyleSahayadhas, Arun, Kenneth Sundaraj, and Murugappan Murugappan. 2012. "Detecting Driver Drowsiness Based on Sensors: A Review" Sensors 12, no. 12: 16937-16953. https://doi.org/10.3390/s121216937
APA StyleSahayadhas, A., Sundaraj, K., & Murugappan, M. (2012). Detecting Driver Drowsiness Based on Sensors: A Review. Sensors, 12(12), 16937-16953. https://doi.org/10.3390/s121216937