In this section, we investigate the mutual interactions between two initially distinct swarms
and
composed of
,
respectively
,
agents driven by rank-based interactions. Initially, we let all agents from
be randomly positioned with
; similarly, for
, we assume that
. Assume non-overlapping supports
with
(interval
is located on the left of
) and finite observation ranges
U such that
). Accordingly, at time
, agents from
do not interact with agents from
and
vice versa. We further assume that initially the swarm
with
has an average barycentric drift velocity
and that
. This implies that the
-agents will, on average, catch and ultimately overcome their
-fellows. Therefore, for large times, the
-agents exhibit a net tendency to become
-leaders. Qualitatively, after a
-
collision, the following dynamic features occur:
- (i)
-agents become leaders and thus are less influenced by (or possibly almost independent from) -agents. This implies that, with time, -agents will exhibit a net tendency to recover their nominal drifts (i.e., the drifts realized before the collision).
- (ii)
-agents feel the presence of their leaders from and, therefore, have a net tendency to increase their drifts.
In the sequel, the implementation of the velocity condition
is realized by considering two distinctive rank-based dynamics: (i) The Hybrid-Atlas model (HAM) introduced by T. Ichiba
et al. [
9] and (ii) a new modified HAM model (MHAM). For both cases, we analytically estimate the threshold values of the relevant control parameters that lead to either outcome (a) or (b).
4.1. Colliding Swarms Driven by Hybrid Atlas Models
In this first situation, we assume that the swarms
and
are populated by slightly different types of agents. Agents
and
share a common rank-based drift, given in Equation (
1), but we endow the
s with an extra systematic constant drift
:
with
.
This ensures that
-agents, on average, initially travel faster than
-agents, and, therefore,
. Since the initial
-support
is located on the left of
, a
-
-collision is unavoidable. At this point, we emphasize that when
, the global heterogeneous society
, when subject to the dynamics given by Equation (
1), is a special case of HAM dynamics [
9]. In [
9], the authors derive the set of combinatorial stability conditions that ensure the existence of a tight swarm stationary state. Heuristically speaking, one has to explicitly verify that, in all possible ranking configurations, the agents
and
are systematically driven by attractive drifts directed toward the barycenter of
.
For
, the hypotheses in [
9] are not strictly realized (since the perfect ranking determination would indeed require
). Along the same lines as in
Section 3, we assume that for large enough but finite
U, the agents’ ranking in
during collision remains approximately unaffected. Accordingly, the HAM tightness conditions also remain approximately valid in
, during collision. The average barycentric drift of
, during collision and when
is ahead of
, reads:
Therefore, the recentered rank-based drift
of agent
from
, in this configuration, becomes:
According to [
9], the set of combinatorial tightness stability conditions for HAM dynamics, under any permutation
of the
agents read as:
where
expresses the necessary condition.
To check the validity of Equation (
13), it is sufficient to focus on the most critical agent configuration. This configuration is realized when all faster agents take the ranks
(
i.e., when
is ahead of
). This corresponds to the choice
in Equation (
13), under the permutation
, where:
To ensure that this sum is negative, one must finally have:
Remark that the condition in Equation (
14) does not depend on the individual swarm sizes
and
, with our specific choice of agent drifts Equation (
10).
4.2. Colliding Swarms Driven by Modified Hybrid Atlas (MHAM) Dynamics
Here, we assume that the
agents from
follow the dynamics of Equation (
1), with
and similarly,
is subject to the same dynamics but with
. From now on and without loss of generality, we focus only on the
and
. As before, we initially configure the system so that swarm
and
do not interact at time
(
i.e.,
,
,
and the common observation range
U is such that
). When
, we have
and we look for a critical ratio
under which a tight swarm survives a
-
collision. To this aim, let us consider a “post-colliding” configuration realized when
is completely ahead of
. In term of stability, this configuration is the most critical:
-agents can only escape from
via this configuration. Therefore, the
tightness has to be checked under this specific configuration.
Accordingly, whenever the stability conditions from [
9] are verified under this critical configuration, they will also be verified under any other configuration. Therefore, the tightness of
only depends on this critical configuration. Formally, we now rewrite Equation (
5) for
and verify whether the stability requirements given by [
9] are fulfilled for this critical case. In this case, the recentered dynamics read:
From [
9], the stability conditions for
read:
The most critical condition is realized for
(this condition tests whether the distance between
and
remains stationary). It reads:
implying that the critical threshold
finally reads:
Notice that for
,
cannot possibly exist (
i.e.,
). The first agent has no drift, since it never observes any leader. Therefore, a society of one leader cannot possibly drive a swarm. Instead a single leader always remains flocked with
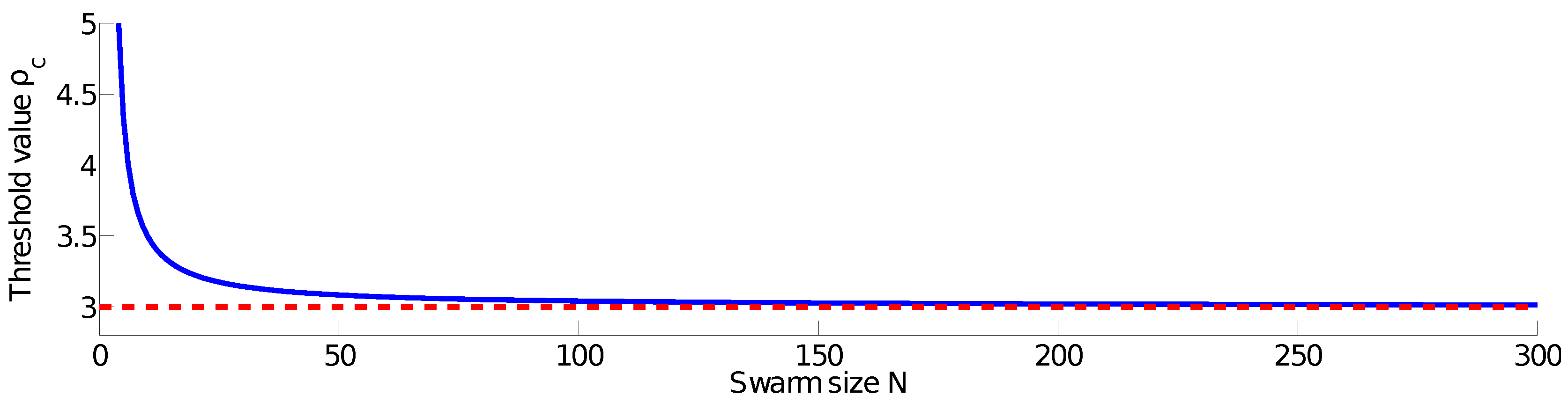
. For
,
Figure 3 shows the critical value
. When
,
asymptotically converges toward
.
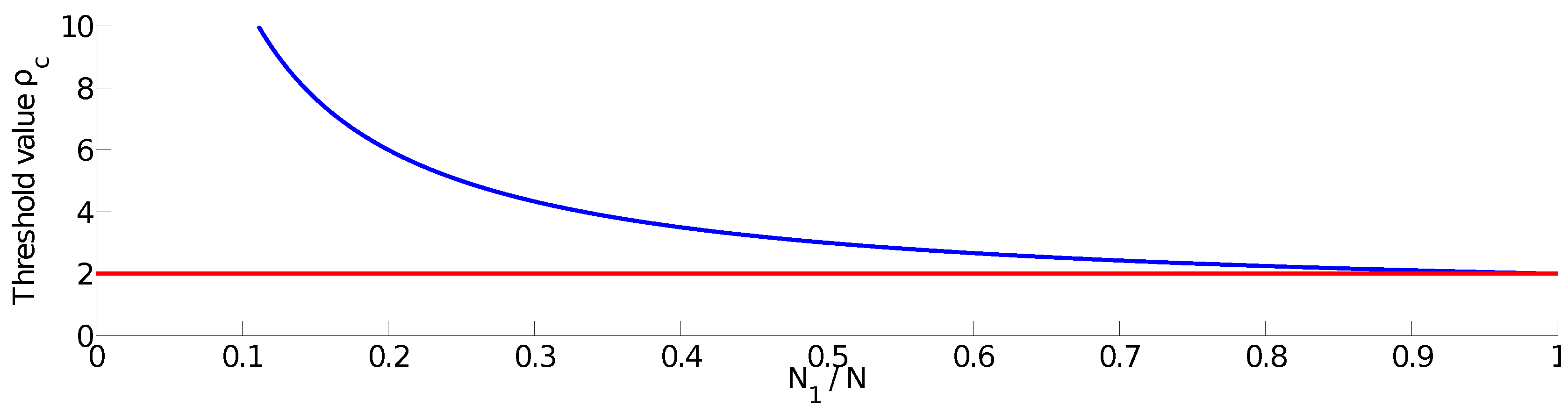
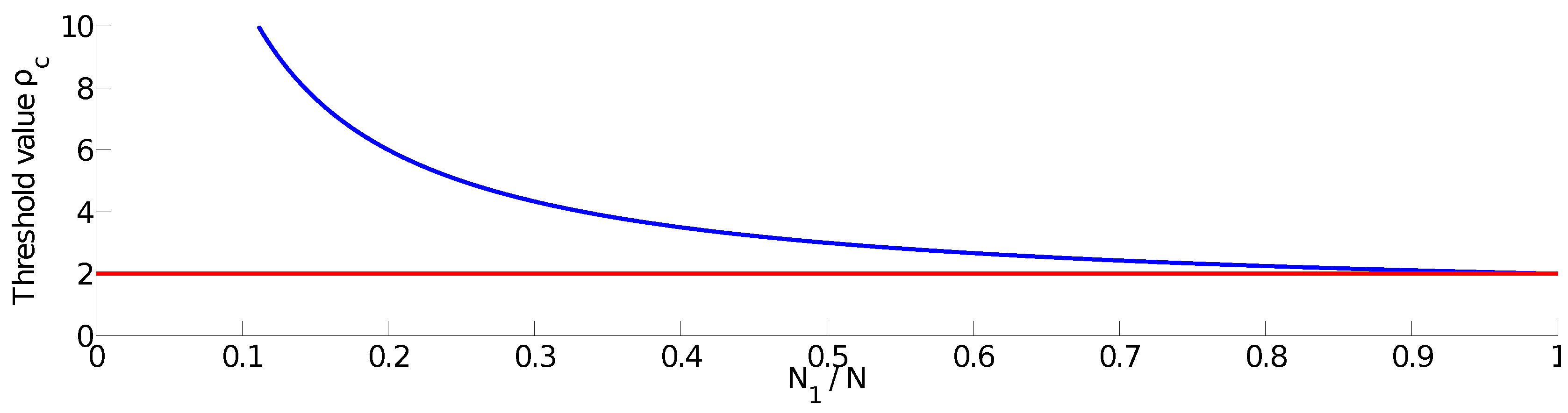
Figure 4 shows the behavior of
as a function of the proportion
(faster agents in
), for
agents. For
and
,
.
Figure 3.
Value of the critical threshold , with regard to the swarm size N of the HAM, when . The asymptotic value of is depicted in red.
Figure 3.
Value of the critical threshold , with regard to the swarm size N of the HAM, when . The asymptotic value of is depicted in red.
Figure 4.
Value of the critical threshold , with regard to the proportion of fast agents in the HAM, when .
Figure 4.
Value of the critical threshold , with regard to the proportion of fast agents in the HAM, when .
4.3. Numerical Simulations
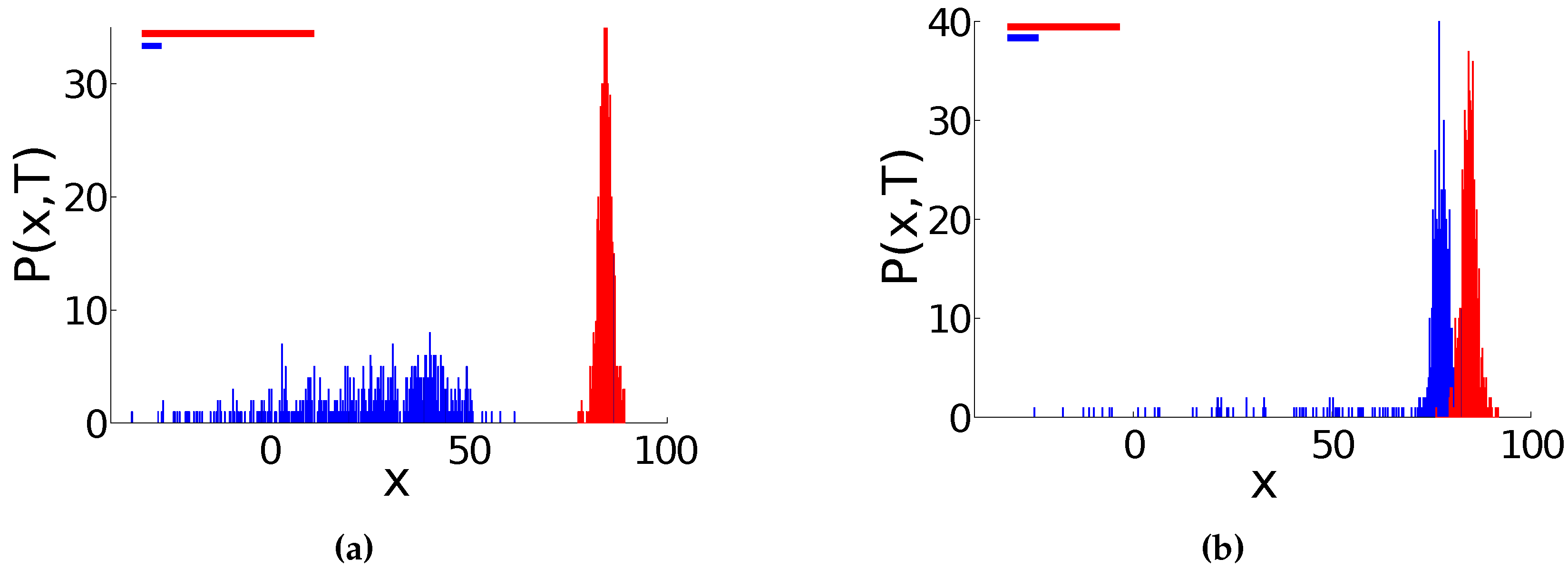
We consider two different cases, both with agents. In both simulations, the society starts with all agents located at , while agents from start at . The common observation range U is selected large enough (), and . For the experiments, we vary ρ, in order to compare i) a case in which both societies remain flocked together with ii) a case leading to the quasi-freedom behavior.
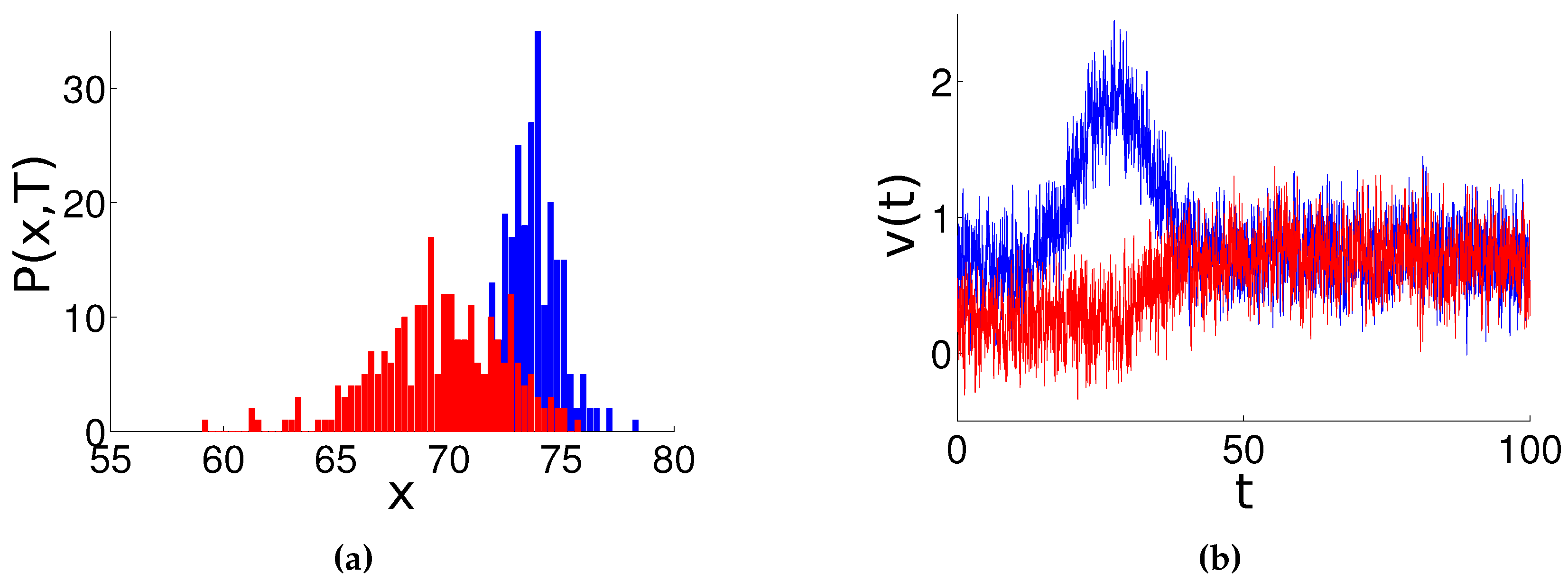
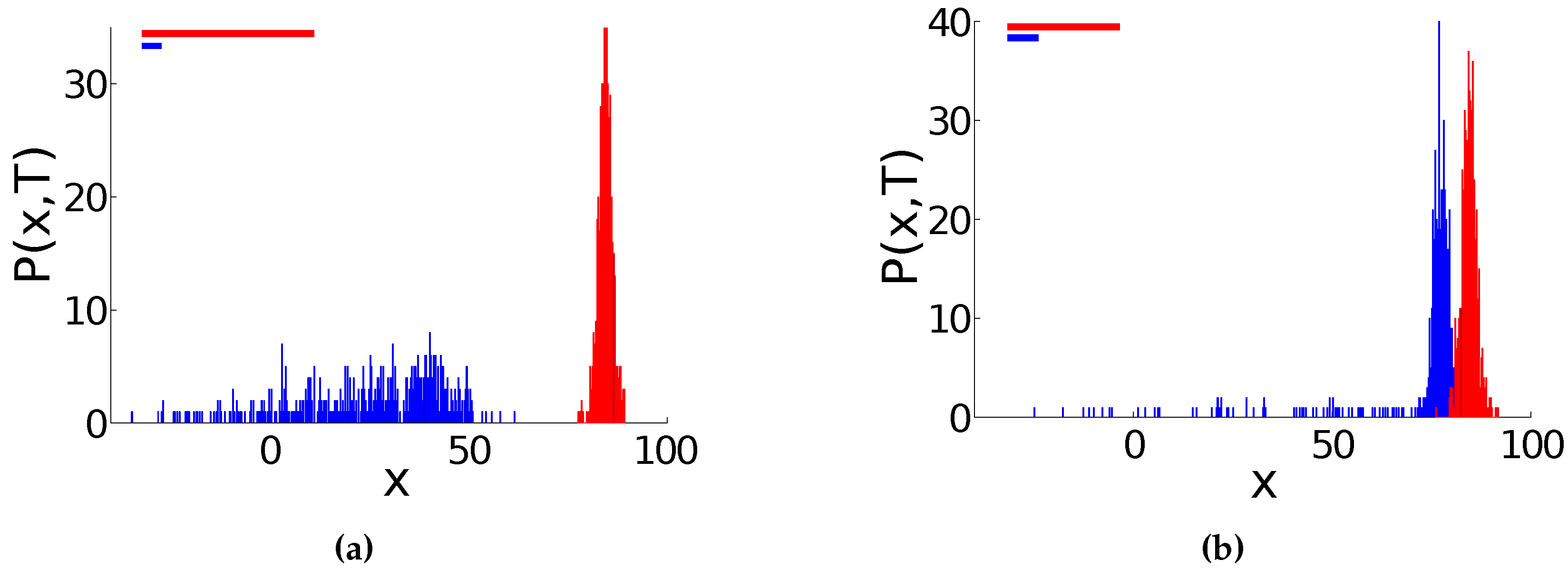
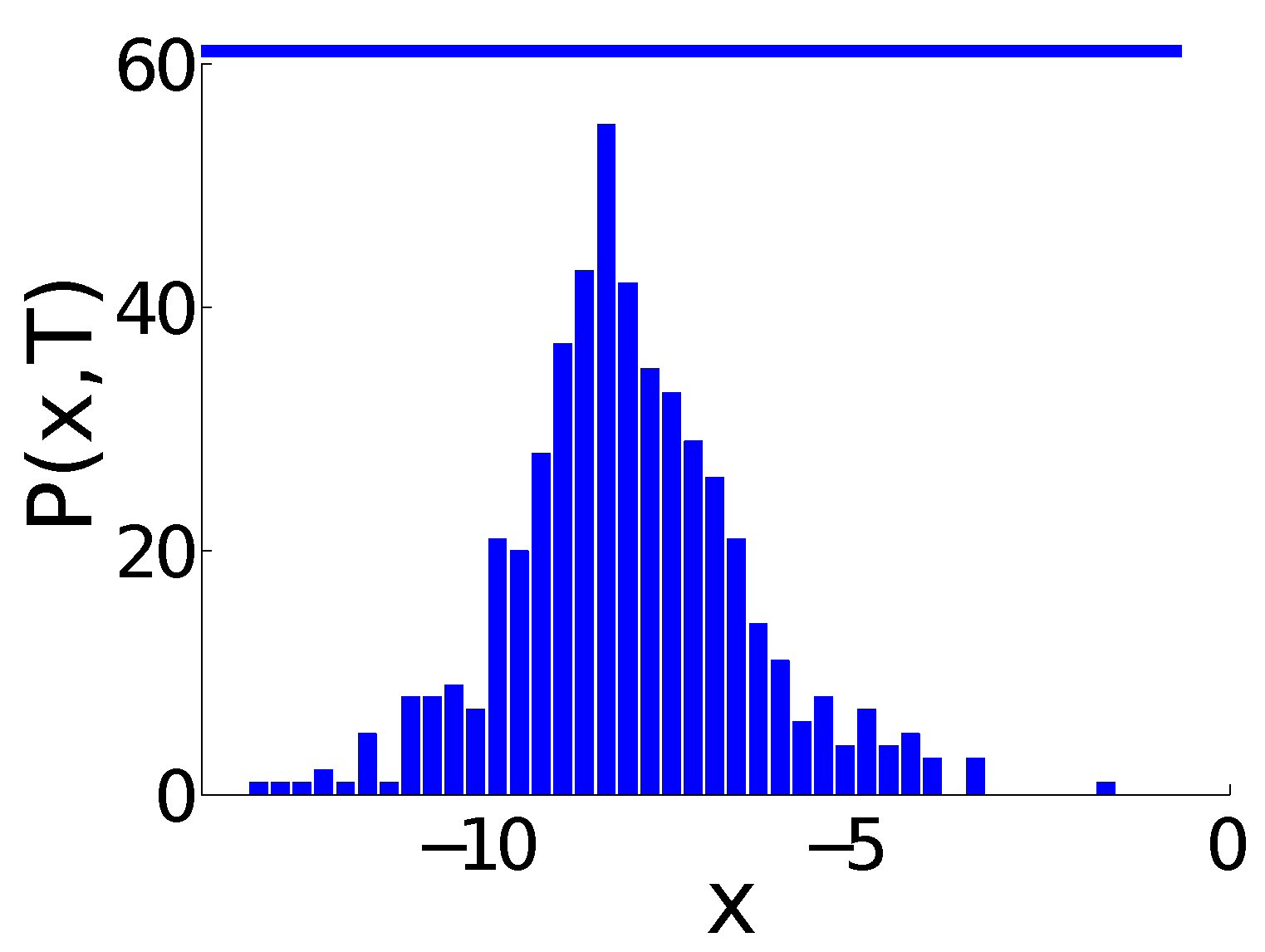
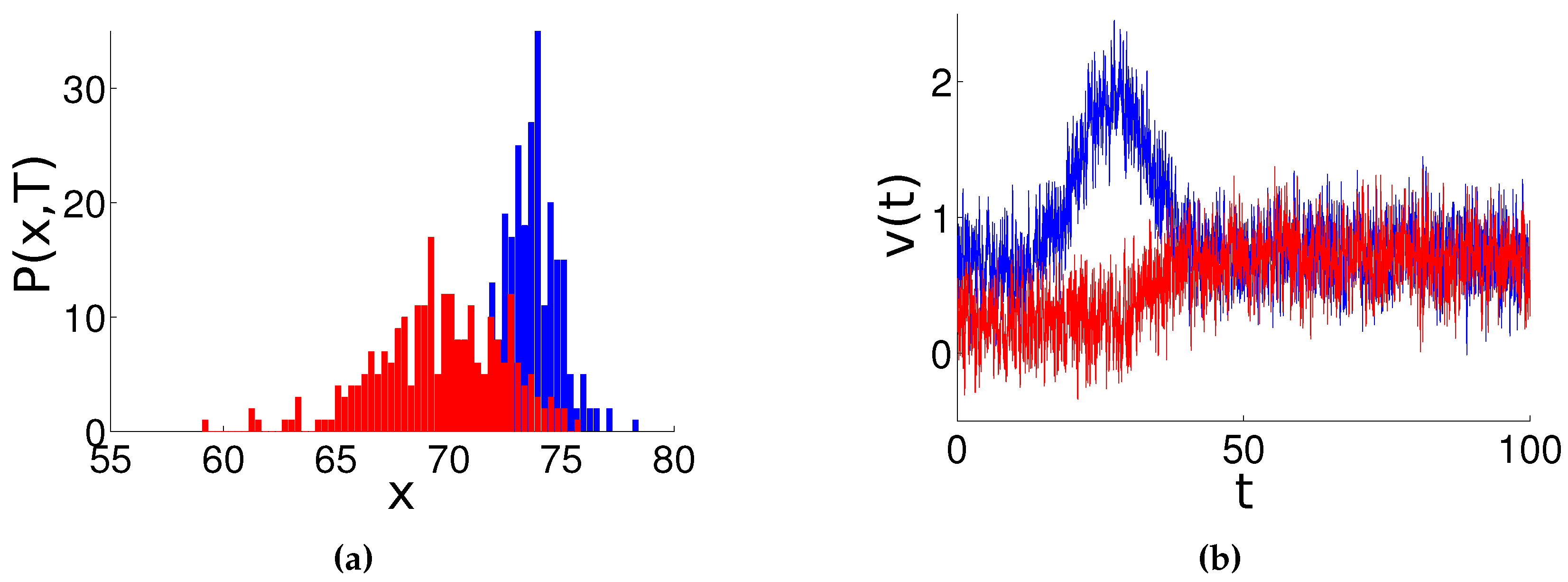
Figure 5 shows one realization in which
, allowing both societies to remain flocked. The left plot shows the final distribution of agents from both societies, as
leads
. In the right plot of
Figure 5, we show the average barycentric speeds of both societies. Notice how
is initially accelerated as its agents interact with those from
. Later, when
has overcome
, agents from
get an extra drift due to interactions with
. This finally enables both societies to evolve at the same average barycentric speed (and therefore to remain flocked).
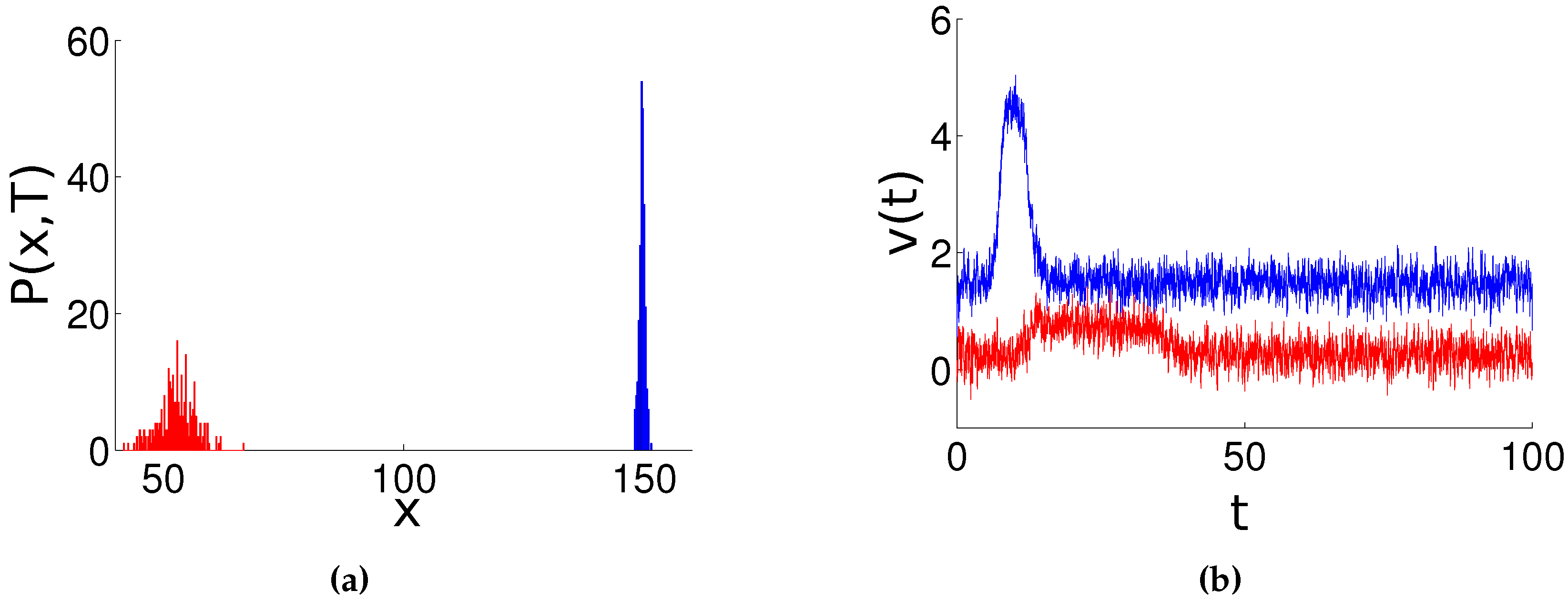
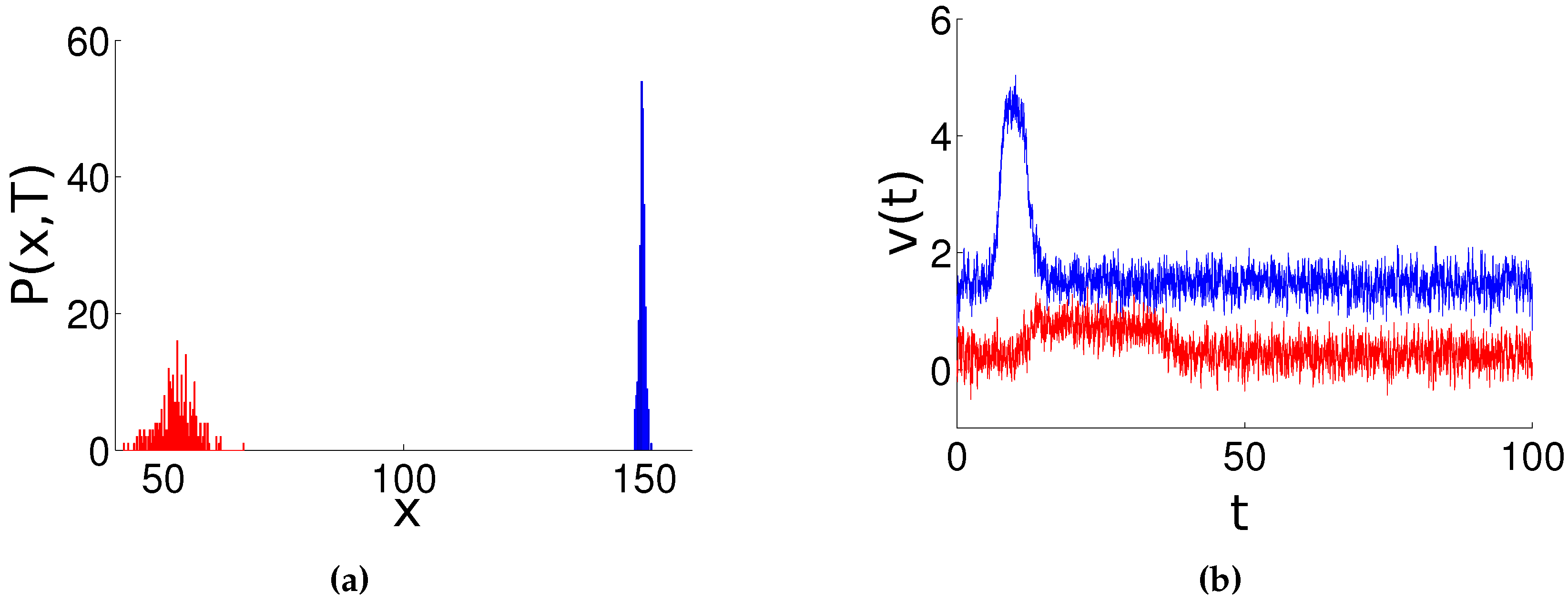
In
Figure 6, we show the same scenario, for one realization with
(quasi-freedom regime). In the right plot, we still notice the initial drift gained by
as its agents interact with those from
. Once
has overcome
, agents from
get an extra drift, that is not large enough to keep both societies flocked together. The extra drift gained by
finally vanishes, once
exits the observation range of the agents from
. Finally,
and
recover their nominal speeds.
Figure 5.
Final distributions and average barycentric speeds for one realization, in which both societies that start at achieve flocking. Here, , , and agents. (a): distribution of the agents from (blue) and (red), at ending time . (b): average barycentric speed of each society, with respect to time.
Figure 5.
Final distributions and average barycentric speeds for one realization, in which both societies that start at achieve flocking. Here, , , and agents. (a): distribution of the agents from (blue) and (red), at ending time . (b): average barycentric speed of each society, with respect to time.
Figure 6.
Final distributions and average barycentric speeds for one realization, in which both societies that start at do not achieve flocking. Here, , , and agents. (a): distribution of the agents from (blue) and (red), at ending time . (b): average barycentric speed of each society, with respect to time.
Figure 6.
Final distributions and average barycentric speeds for one realization, in which both societies that start at do not achieve flocking. Here, , , and agents. (a): distribution of the agents from (blue) and (red), at ending time . (b): average barycentric speed of each society, with respect to time.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}