Abstract
The problem of robust ∞ control is investigated for Markov jump systems with nonlinear noise intensity function and uncertain transition rates. A robust ∞ performance criterion is developed for the given systems for the first time. Based on the developed performance criterion, the desired ∞ state-feedback controller is also designed, which guarantees the robust ∞ performance of the closed-loop system. All the conditions are in terms of linear matrix inequalities (LMIs), and hence they can be readily solved by any LMI solver. Finally, a numerical example is provided to demonstrate the effectiveness of the proposed methods.
1. Introduction
Many dynamical systems are subject to random abrupt changes, which may be caused by random failures and repairs of the components, changes in the interconnections of subsystems, sudden environment changes, etc. Most of the traditional dynamical systems are usually powerless to face these random abrupt changes. However, Markov jump systems (MJSs), a special class of stochastic hybrid systems, are suitable mathematical model to describe such systems. As a result, MJSs have been widely applied in many fields, such as unmanned air vehicles [1], solar power stations [2], communication systems [3], power systems [4], economics [5], and so on.
MJSs have been widely investigated and many useful results have obtained, such as the controllability and observability [6], controller design [6–9] and filtering [10,11]. For more extensive introductions, the interested reader is referred to an important monograph about MJSs [12]. It is noticed that in almost all reported results, only linear MJSs are considered. It is well known that the nonlinearity is an inevitable feature of almost all real-world systems. The existence of nonlinearity may lead to undesirable behavior of the systems. Therefore, MJSs with nonlinearity also attract researcher’s attention; see [13–15] and references therein.
For MJSs, the transition rates are crucial to determine the behavior of the systems. Thus, the main investigation on MJSs is to assume that the information on transition rates is completely known. However, in practice, only estimated values of transition rates are available, and estimation errors, i.e., the uncertainties of the transition rates, may lead to instability or at least degraded performance of a system. Therefore, no matter in the theory or in practice, it is necessary to further consider more general jump systems with uncertain transition rates. There have been some reports regarding control of this type of system in the literature. For example, in [16], the stability and control problems are considered for linear MJSs with uncertain transition rates by using restrictive Young inequality. By using general Young inequality, in [17] less conservative results than that of [16] are proposed. Due to the use of Young inequality, the proposed controller design methods in both [16] and [17] need to solve a set of nonlinear matrix inequalities (NLMIs). Unfortunately, such NLMIs cannot still be completely solved up to now [18]. Moreover, in the existing literatures, only linear MJSs with uncertain transition rates were studied. To the author’s best knowledge, the problem of ∞ control for MJSs with nonlinear noise intensity function and uncertain transition rates has not been fully investigated. It still remains important and challenging.
This paper is concerned with the robust ∞ control for MJSs with nonlinear noise intensity function and uncertain transition rates. First, the robust ∞ performance criterion is derived. Then, ∞ controller design method is presented based on the proposed performance criterion. Instead of using the traditional Young inequality, we adopt an improved bounding technique for the uncertain terms. As a benefit, the obtained controller design method only needs to solve a set of pure linear matrix inequalities (LMIs) rather than NLMIs, which can be readily solved by any LMI solver. Finally, a numerical example is given to show the effectiveness of the proposed methods.
Notations: The notations in this paper are quite standard. Throughout this paper, ℝn and ℝn×m denote respectively the n-dimensional Euclidean space and the set of all n × m real matrices. The superscript T denotes transpose. The notation X ≥ Y (respectively, X > Y) where X and Y symmetric matrices, means that X − Y is positive semidefinite (respectively, positive definite). I denotes the identity matrix of appropriate dimension. L2[0, ∞) is the space of square integrable functions.
is a complete probability space with a filtration {t}t≥0 satisfying the conditions that it is right continuous and 0 contains all
−null sets. {⋅} stands for the mathematical expectation. trace{A} denotes the trace of a matrix A. We use ∗ as an ellipsis for the terms that are introduced by symmetry. diag{·,⋯,·} stands for a block-diagonal matrix. Matrices, if their dimensions are not explicitly stated, are assumed to be compatible for algebraic operations.
2. Problem Description
Consider the following MJS with nonlinear noise intensity function and uncertain transition rates.
where
is the state
is the control input
is the disturbance input which belongs to L2[0, ∞],
is the controlled output,
is the nonlinear noise intensity function, and
is an nw-dimention Brownian motion satisfying ℇ{dwt} = 0, ℇ{dwt(dwt)T} = Idt. The mode jump process {rt} is a continuous-time, discrete-state Markov process taking values in a finite set
and has mode transition probabilities:
where Δ > 0, limΔ→0{o(Δ)/Δ}=0,
for i ≠ j, is the transition rate from mode i at time t to mode j at time t + Δ, and
for each mode i. In addition, we assume that the Markov process {rt} is independent of the Brownian motion {wt}.
In this paper, the noise intensity function f(·,·) and the transition rate matrix
cannot be exactly obtained. It is only known that f(·,·) satisfies the following growth condition:
where Fi,
is a known constant matrix.
As for
, only its admissible uncertainty domain is known:
where
is a known constant matrix, while ∆Π = (∆πij) denotes the uncertainty of the mode transition rate matrix. For all
denote the estimate of
and
is the estimate error, which can take any value in [−εij, εij]; for all
, one has
and
.
In this paper, we only consider a mode-dependent linear state-feedback control law
where
,
, are the controller gain matrices to be designed. Substituting the state-feedback controller (6) into system (1) one yields the corresponding closed-loop system
where
Certainly, the resulting closed-loop system (7) is also a MJS with nonlinear noise intensity function and uncertain transition rates. Now, for a more precise description of the main objective in this paper, we introduce the following definitions for the underlying system.
Definition 1. [19] The system (7) is said to be robustly stochastically stable if with vt = 0
holds for any initial conditions and over all the admissible noise intensity functions and transition rates satisfying (4)–(5).
Definition 2. [19] Given a scalar γ > 0, the system (7) is said to be robustly stochastically stable with disturbance attenuation level γ if it is robustly stochastically stable, and under zero initial conditions,
is satisfied for all nonzero vt ∈ L2[0, ∞) and over all the admissible noise intensity functions and transition rates satisfying (4)–(5), where
Now, we are in a position to propose the object of the paper. The purpose is to design a linear state-feedback controller (6), such that the resulted closed-loop system (7) is robustly stochastically stable with a given disturbance attenuation level γ over all the admissible noise intensity functions and transition rates.
The following lemma will be used in the sequel.
Lemma 1. (Schur Complement [20]) Given constant matrices Ω1, Ω2 and Ω3, with and thenif and only if
For the sake of simplicity, in the rest of the paper a matrix A(rt = i) will be denoted by Ai.
3. Robust Stochastic ∞ Performance Analysis
In this section, the ∞ performance analysis problem of system (7) is considered. The following theorem gives a robust stochastic ∞ performance criterion for system (7).
Theorem 1. Consider the MJS (1) with nonlinear noise intensity function and uncertain transition rates. Given the controller gains Ki,
, the closed-loop system (7) is robustly stochastically stable with disturbance attenuation level γ if there exist matrices Pi > 0, Mij ≥ 0, i,
, j ≠ i, and scalars αi,
such that for the following LMIs are feasible.
where
Proof. Construct a stochastic Lyapunov function candidates as
where Pi are symmetric positive definite matrices with appropriate dimensions to be determined.
Let be the weak infinitesimal generator of the random process {xt, rt}. Then, for each rt = i,
, it can be shown that
In addition, noticing
and
, we have
From (17), we know that
if Ψi < 0. By the Schur complement, one can see that (8) guarantees Ψi < 0. Thus,
holds. Integrating both sides with respect to t over the time period [0, ∞), we have
In addition, by Itô’s formula, we can derive
Therefore, taking the mathematical expectation on both sides of (18), we have
Under zero initial conditions, we have ℇV (x0, r0, 0) = 0 and ℇV (x∞, r∞, ∞) ≥ 0, thus (20) guarantees
.
The second task is to show robustly stochastically stability of the closed system when vt = 0. By following similar procedures as previously, we obtain
One can see that (8) guarantees Θi < 0. Thus V (x(t), t, i) < 0 holds for every xt ≠ 0. Therefore, by Definition 2 and [21], the closed-loop system (7) is robustly stochastically stable with vt = 0. This completes the proof. □
Remark 1. It is well known that the uncertainty domain (5) can be formulated into a fix polytope ([8,22]), and then one can test the robust stochastic ∞ performance by solving large arrays of simultaneous LMIs corresponding to the vertices of the uncertainty polytope. However, as the number of modes increases, the number of LMIs increases exponentially. Thus it leads to a combinatoric complexity explosion ([23,24]). Therefore, the element-wise description (i.e.,(5)) for the uncertain transition rates has attracted researcher’s attention since the number of resulted LMIs increases only in function of power along with the increase of the number of modes. When using the element-wise description, a key problem is how to bound the uncertain term. The literature [25] considered the robust stabilization problem with the element-wise description for the uncertain transition rates. The proposed controller design method in [25] only involves LMIs, but they are usually conservative. The main reason for this is that when bounding the uncertain term all transition rates are enlarged as their upper bounds so that the relationship among them is not taken into account. By utilizing the relationship among the transition rates, literature [16,17] obtained less conservative results than that of [25]. However, in the stability analysis of [16,17], the traditional Young inequality is used to bound the uncertain term Such bounding technique produces the quadratic form of Pj − Pi (for example, in [17] the quadratic terms arise), which results that the obtained controller design method involves a set of NLMIs. Unfortunately, such NLMIs cannot be completely solved yet up to now [18]. Based on the bounding technique of [17], a LMI method for controller design is proposed in [26], but it is at the expense of the increase of conservatism (i.e., the method in [26] has a higher conservatism than that of [17]). From (14)–(16), one can see that our adopting bounding technique avoids the production of quadratic form of Pj − Pi. It is easy to prove that the bounding technique does not increase conservatism comparing with those of [16] and [17]. Moreover, as shown in next section, the obtained controller design method only involves a set of pure LMIs rather than NLMIs, which can be readily solved by any LMI solver. Therefore, the merit of the adopted bounding technique is that the obtained controller design method is not only LMI method but also not at the expense of the increase of conservatism comparing with the results in [16,17] and [26].
4. Robust Stochastic ∞ Controller Design
In this section, the ∞ controller design problem of system (1) is considered. The following theorem is proposed to design the robust stochastic ∞ controller with the form (6) for system (1).
Theorem 2. Consider the MJS (1) with nonlinear noise intensity function and uncertain transition rates. The closed -loop system (7) is robustly stochastically stable with disturbance attenuation level γ if there exist matrices Qi > 0, Nij ≥ 0, Yi, i,
, j ≠ i, and scalars βi,
such that for, the following LMIs are feasible.
where
Moreover, an admissible controller gain is given by
Proof. First of all, by Theorem 1, we know that system (7) with nonlinear noise intensity function and uncertain transition rates is robustly stochastically stable with disturbance attenuation level γ if inequalities (8)–(10) holds. By using the Schur complement and noticing (8)–(10) are equivalent to the following (26)–(28), respectively.
where
Setting
, performing a congruence transformation to the inequality in (26) by diag{Qi, I,⋯, I} and applying the change of variable Nij = Qi Mij Qi, Yi = KiQi, and
, one can obtain the inequality in (22). Performing a congruence transformation to the inequality in (27) by diag{βiI, I}, one can obtain the inequality in (23). Performing a congruence transformation to the inequality in (28) by diag{Qi, I}, one can obtain the inequality in (24). In addition, due to Yi = KiQi, the desired controller gain is given by
. This completes the proof. □
Remark 2. In view of Theorem 2, the ∞ control problem for MJSs with nonlinear noise intensity function and uncertain transition rates can be solved in terms of the feasibility of LMIs in (22)–(24). Note that the inequalities in (22)–(24) are not only linear with respect to variables Qi, Nij, Yi and βi but also linear with respect to the scalar γ2. Then, the robust ∞ controller with minimum guaranteed cost can be readily found by solving the following convex optimization problem:
Then, the minimum guaranteed cost is given by γ* = (min ϕ)1/2.
5. Numerical Example
In this section, an example is provided to illustrate the effectiveness of the developed theory in this paper.
Consider the MJS (1) with two modes, whose data are:
The nonlinear noise intensity function satisfies:
The uncertain transition rates satisfy:
The robust stochastic ∞ controller is designed such that the resulting closed-loop system is robustly stochastically stable with disturbance attenuation level γ over all the admissible nonlinear noise intensity functions and uncertain transition rates. By solving COP, the obtain minimum disturbance attenuation level is γ* = 0.5801 with the corresponding controller gain matrices
In the following simulation study, we choose f(xt, 1) = 0.1 sin ‖xt‖ xt and f(xt, 2) = −0.2 cos ‖xt‖ xt, which obviously satisfy (29). In each simulation run, the transition rates are randomly varying but satisfy (30). To make the simulation more persuasive, simulation results with 1000 random samplings are shown in this example.
Figure 1 is the state response curves with initial condition x0 = [−1 1]T when ut = 0 and vt = 0. It is shown that the open-loop system is not stable since its state trajectories are not convergent along with the increase of time.
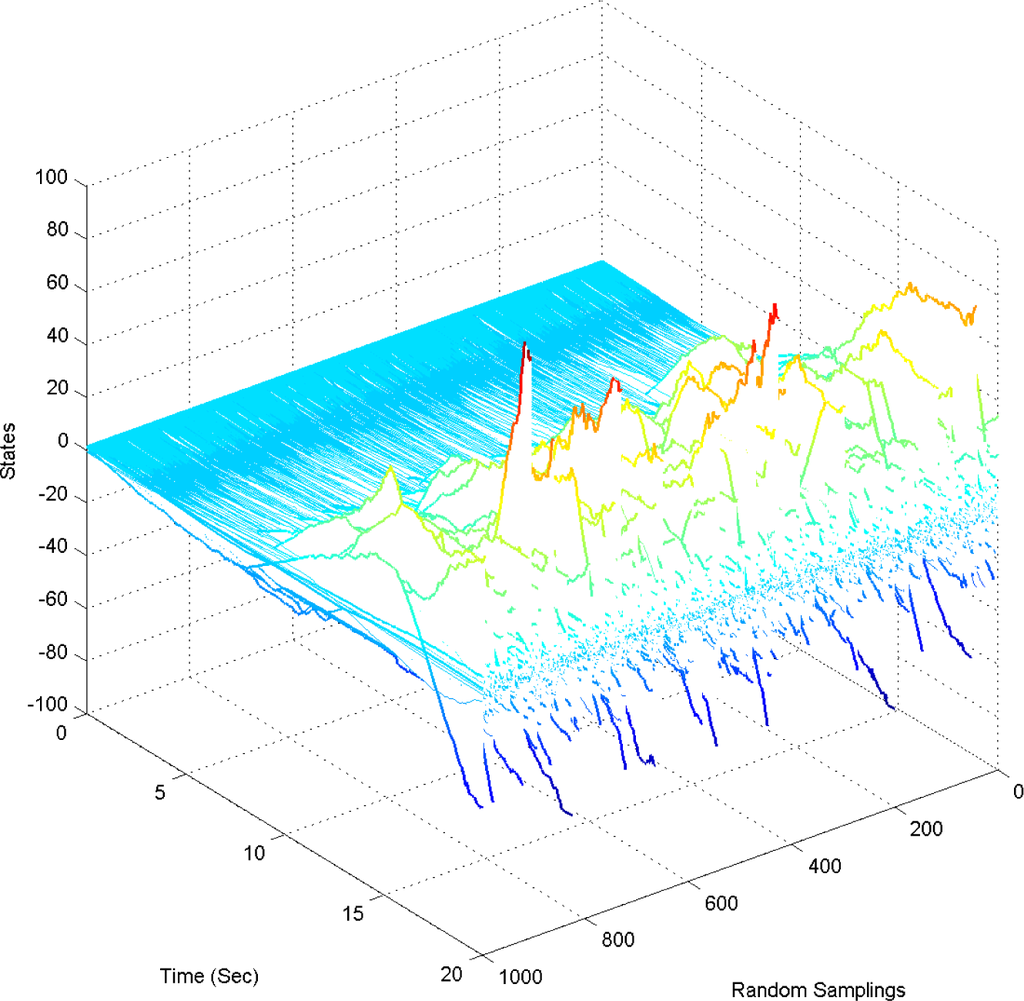
Figure 1.
State response of the open-loop system with 1000 random samplings.
However, under the same conditions, applying the controllers in (31), the trajectory simulation of state response for the closed-loop system are shown in Figure 2. It is shown that the closed-loop system is stable.
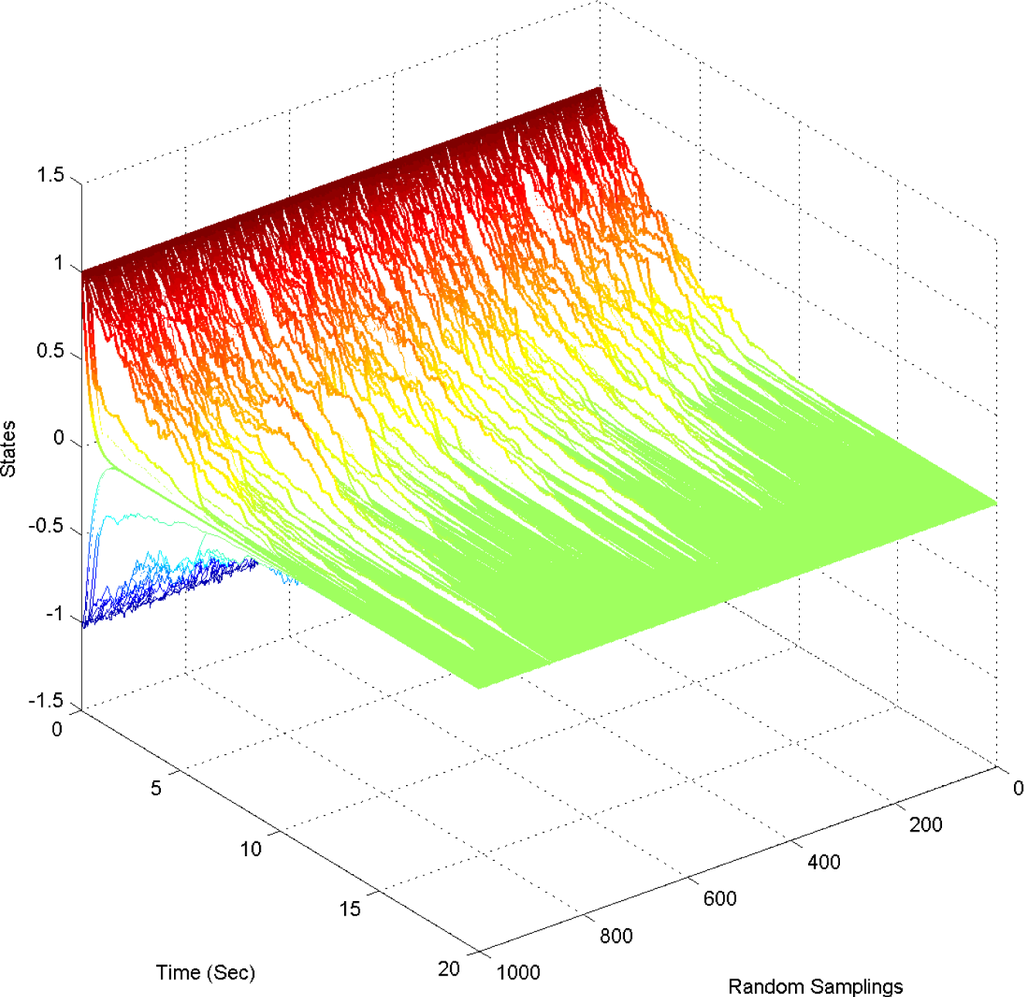
Figure 2.
State response of the closed-loop system with 1000 random samplings.
Now we further check whether the closed-loop system achieves the desired disturbance attenuation level. We made simulations under the disturbance input vt = cos(t)e−0.1t. Figure 3 shows the trajectories of functional cost
under zero-initial-state condition, where γ0 = 0.5801. One can see from Figure 3 that J(Tf) always becomes negative along with the increase of Tf in all the 1000 simulations. Therefore, the closed-loop systems achieves the desired disturbance attenuation level.
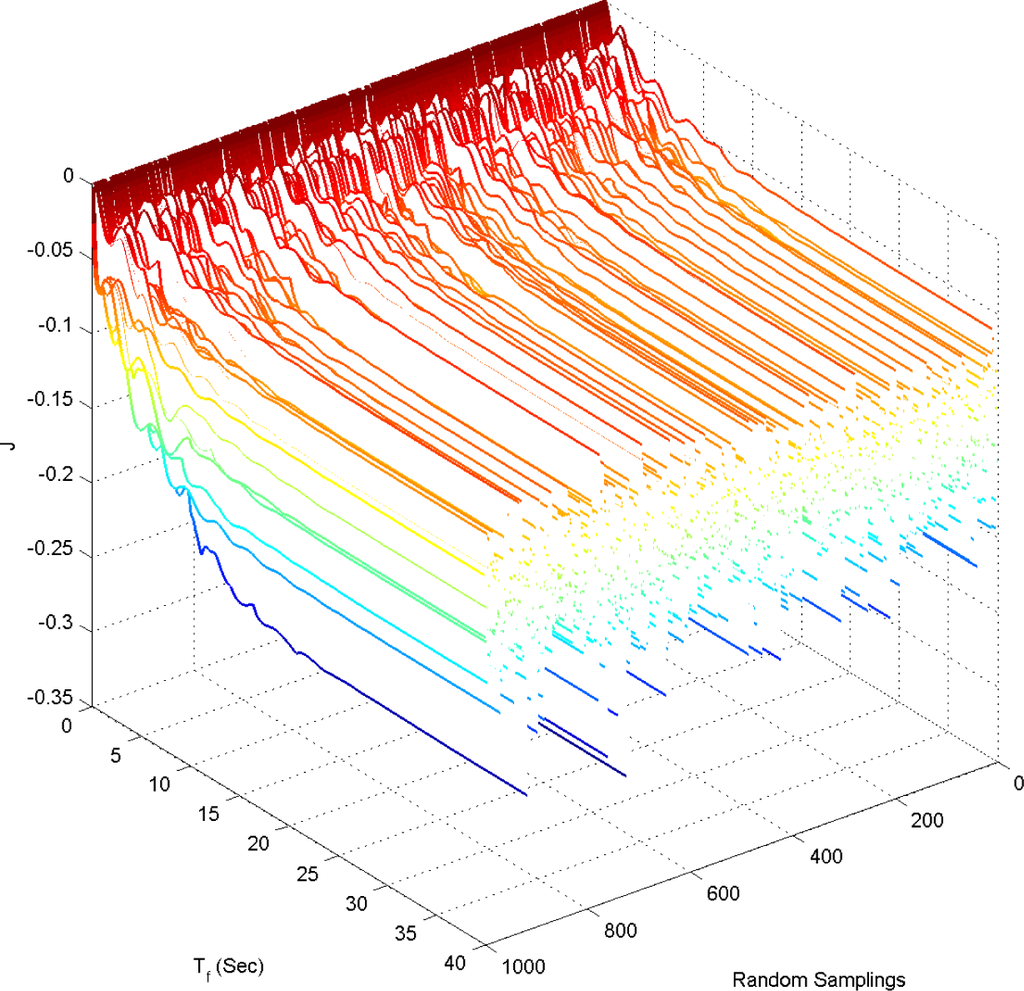
Figure 3.
Functional cost J(Tf) with 1000 random samplings.
6. Conclusion
In this paper, the ∞ control problem is investigated for MJSs with nonlinear noise intensity function and uncertain transition rates. Attention is focused on the design of a controller such that the closed-loop system is robustly stochastically stable and guarantees a desired robust ∞ performance over all the admissible noise intensity functions and transition rates. The developed method for controller design is in terms of linear matrix inequalities, which can be readily solved by any LMI solver. The effectiveness of the method is illustrated by a numerical example.
Acknowledgments
This work is supported by National Natural Science Foundation of China (61104115), Research Fund for the Doctoral Program of Higher Education of China (20110072120018), and the Fundamental Research Funds for the Central Universities.
Author Contributions
Both authors have contributed to the study and preparation of the article. Both authors have read and approved the final manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Stoica, A.; Yaesh, I. Jump-Markovian based control of wing deployment for an uncrewed air vehicle. J. Guid. Control Dyn. 2002, 25, 407–411. [Google Scholar]
- Sworder, D.D.; Rogers, R.O. An LQG solution to a control problem with solar thermal receiver. IEEE Trans. Autom. Control 1983, 28, 971–978. [Google Scholar]
- Ploplys, N.J.; Kawka, P.A.; Alleyne, A.G. Closed-loop control over wireless networks. IEEE Control Syst. Mag. 2004, 24, 58–71. [Google Scholar]
- Ugrinovskii, V.A.; Pota, H.R. Decentralized control of power systems via robust control of uncertain Markov jump parameter systems. Int. J. Control 2005, 78, 662–677. [Google Scholar]
- Svensson, L.E.O.; Williams, N. Optimal monetary policy under uncertainty: A Markov jump-linear-quadratic approach. Fed. Reserve St. Louis Rev. 2008, 90, 275–293. [Google Scholar]
- Ji, Y.; Chizeck, H.J. Controllability, stabilizability, and continuous-time Markovian jump linear quadratic control. IEEE Trans. Autom. Control 1990, 35, 777–788. [Google Scholar]
- Feng, X.; Loparo, K.A.; Ji, Y.; Chizeck, H.J. Stochastic stability properties of jump linear systems. IEEE Trans. Autom. Control 1992, 37, 38–53. [Google Scholar]
- Costa, O.L.V. do Val, J.B.R.; Geromel, J.C. Continuous-time state-feedback H2-control of Markovian jump linear system via convex analysis. Automatica 1999, 35, 259–268. [Google Scholar]
- Do Val, J.B.R. Geromel, J.C.; Goncalves, A.P.C. The 2-control for jump linear systems: Cluster observations of the Markov state. Automatica 2002, 38, 343–349. [Google Scholar]
- De Farias, D.P.; Geromel, J.C. do Val, J.B.R.; Costa, O.L.V. Output feedback control of Markov jump linear systems in continuous-time. IEEE Trans. Autom. Control 2000, 45, 944–949. [Google Scholar]
- Costa, O.L.V.; Guerra, S. Robust linear filtering for discrete-time hybrid Markov linear systems. Int. J. Control 2002, 75, 712–727. [Google Scholar]
- Costa, O.L.V.; Fragoso, M.D.; Todorov, M.G. Continuous-Time Markov Jump Linear Systems; Asmussen, S., Gani, J., Jagers, P., Kurtz, T.G., Eds.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Yue, D.; Han, Q.-L. Delay-dependent exponential stability of stochastic systems with time-varying delay, nonlinearity, and Markovian switching. IEEE Trans. Autom. Control 2005, 50, 217–222. [Google Scholar]
- Senthilkumar, T.; Balasubramaniam, P. Delay-dependent robust stabilization and ∞ control for nonlinear stochastic systems with Markovian jump parameters and interval time-varying delays. J. Optim. Theory Appl. 2011, 151, 100–120. [Google Scholar]
- Zhang, Y. Stability of discrete-time delay Markovian jump systems with stochastic non-linearity and impulses. IET Control Theory A 2013, 7, 2178–2187. [Google Scholar]
- Xiong, J.; Lam, J.; Gao, H.; Ho, D.W.C. On robust stabilization of Markovian jump systems with uncertain switching probabilities. Automatica 2005, 41, 897–903. [Google Scholar]
- Xiong, J.; Lam, J. Robust 2 control of Markovian jump systems with uncertain switching probabilities. Int. J. Syst. Sci. 2009, 40, 255–265. [Google Scholar]
- Shu, Z.; Lam, J. Static output-feedback stabilization of discrete-time Markovian jump linear systems: A system augmentation approach. Automatica 2010, 46, 687–694. [Google Scholar]
- Xu, S.; Chen, T. Robust ∞ control for uncertain stochastic systems with state delay. IEEE Trans. Autom. Control 2002, 47, 2089–2094. [Google Scholar]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Pennsylvania, PA, USA, 1994. [Google Scholar]
- Mao, X. Robustness of exponential stability of stochastic differential delay equation. IEEE Trans. Autom. Control 1996, 41, 442–447. [Google Scholar]
- El Ghaoui, L.; Rami, M.A. Robust state-feedback stabilization of jump linear systems via LMIs. Int. J. Robust Nonlinear Control 1996, 6, 1015–1022. [Google Scholar]
- Ugrinovskii, V.A. Randomized algorithms for robust stability and guaranteed cost control of stochastic jump parameters systems with uncertain switching policies. J. Optim. Theory Appl. 2005, 124, 227–245. [Google Scholar]
- Barmish, B.R.; Shcherbakov, P.S. On avoiding vertexization of robustness problems: the approximate feasibility concept. IEEE Trans. Autom. Control 2002, 47, 819–824. [Google Scholar]
- Boukas, E. K.; Shi., P.; Benjelloun, K. On stabilization of uncertain linear systems with jump parameters. Int. J. Control 1999, 72, 842–850. [Google Scholar]
- Wang, G.; Zhang, Q. Robust ∞ control of Markovian jump systems with uncertain switching probabilities. Asian J. Control 2012, 14, 1407–1410. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).