1. Introduction
The miniaturization of electronic elements and the concept of all-in-one becomes a multitasking device to a smartphone, and at the same time, the mobile network that evolves over generations passes from analog voice communication until the voice on IP (VoIP) changes the telecommunication infrastructure and creates new services. The positioning service given by smartphones has mainly been the most useful to human activities, like sports, navigation, e-commerce, banking, emergency services, etc., with each one having different accuracy level requirements and response times that will depend exclusively on the quality of the antenna and GNSS chip. The portability and flexibility of smartphones compared to heavy geodesic receivers have attracted manufacturers to implement positioning techniques using assisted technology, where the device can reach the same performance as a professional one.
The A-GNSS refers to sending GNSS information to assist a smartphone in reducing the processing time on a GNSS chip and computing the PVT solution; the information includes ephemeris, ionosphere corrections, constellation almanacs, visible satellites, and mobile network information like cell identifiers, ToA, DoA, connection databases, and IP. The assisted data are used to from correction services in real time that transmit on an IP protocol and RTCM standard; this kind of service is joined with the CORS service.
The aim of this study is to evaluate the principal performance parameters of two smartphones, including one with a single frequency in SPS, and one with A-GNSS during a car trajectory while passing by different outdoor, light indoor, and urban canyon scenarios in the city.
Many assisted techniques for precise point positioning include real-time correction services based on NTRIP using a CORS network and orbit correction services provided by IGS. The general research is focused on developing Android apps to connect to all of these services and provide corrections to reach better accuracy; the A-GNSS is only a small part of this research.
2. Smartphones
Smartphones, which have versatile terminals with coupled technologies in a compact design and strong digital processing capabilities, have complemented daily activities. Most of the usual services are based on the position of the user, and the precision level is determined by the power of the hardware and software characteristics of it. The basic smartphone has navigation and location services operating only with single-frequency features that are limited to basic positioning algorithms and simple correction techniques, so the PVT solution is inaccurate. The only possible solution to achieve high accuracy is to provide it with extra information from network mobile services. The new generation of smartphones includes multi-constellation and double frequency, such as Xiaomi Mi 8 [
1], which provides better accuracy in a PVT solution due to the availability of visible satellite, but it is still assisted by the mobile network.
Android is a mobile operating system developed by Google that is used in most smartphones. It is flexible, as it can create a wide variety of applications with different specifications. RINEX Geo++ is the app that takes advantage of the release of GNSS raw [
2] data information and records in the standard file format; RINEx contains raw data collected by GPS receivers, with the observation data in the 2.11 and 3.x formats.
3. Scenarios Setup
The GPS space segment is designed to guarantee a minimum level of −158.6 dBW [
3] power. Most smartphones have an omnidirectional radiation pattern, have no gain, and are linear polarized [
4], and the power received is under the minimum threshold affecting the quality of the signal besides the Doppler shift, which changes the frequency of the received signal, and the instability of the receiver oscillator is an important source of error that causes difficulty to the GNSS chip, starting with digital processing and the demodulation process to compute the PVT solution.
The receiver compares the received signal with a local replica signal to track and acquire the signal with correlators, with all error factors changing the fundamental frequency; the correlator must scan all possible frequencies and the code delay until it finds a power peak [
5] (pp. 30–31) to start the demodulation process of the ephemeris data. This gives the GPS receiver a two-dimensional search space for each satellite called the frequency/code delay search space. The duration of this search establishes the TTFF. Two limitations, which are weak signals and a slow time to implement the first fix, are overcome with the A-GPS. A receiver with prior knowledge of these frequency and code variables reduce the TTFF. For example, for a cold start without information, the time is about 20 (s) [
5] (p. 33); for a warm start, the almanac can be used along with a priori position, time, and frequency to reduce the search space; and for a hot start, the almanac or ephemeris can be used along with an a priori position. If the time is known well enough (from an accurate real-time clock), then the broadcast time of the week and ephemeris need not be decoded. The assisted data given by the network mobile are the reference location, reference time, navigation model (ephemeris + clock correction), ionosphere corrections (Klobuchar model), differential corrections (DGPS), real-time integrity (real time alerts), almanacs (constellation almanacs), UTC models (UTC parameters), acquisition assistance (list of visible satellites), and ephemeris extension (extended validity ephemeris).
The performance parameters of smartphones with a single frequency L1 in SPS and Xiaomi Mi 8 with A-GNSS are evaluated with respect to accuracy, TTFF, and PVT solution availability in different scenarios in the city, like in an outdoor area with open sky and satellite visibility; a light indoor scenario characterized by high buildings, trees, and wireless service interferences; and an urban canyon where the street is flanked by buildings on both sides in a car trajectory.
4. Results
The GNSS data of a single-frequency smartphone and Xiaomi Mi 8 are processed with RTKlib in “Single” mode positioning, where both files are overlapping to compare the observation data measured. In
Figure 1, the processed and real car trajectory in the city are shown.
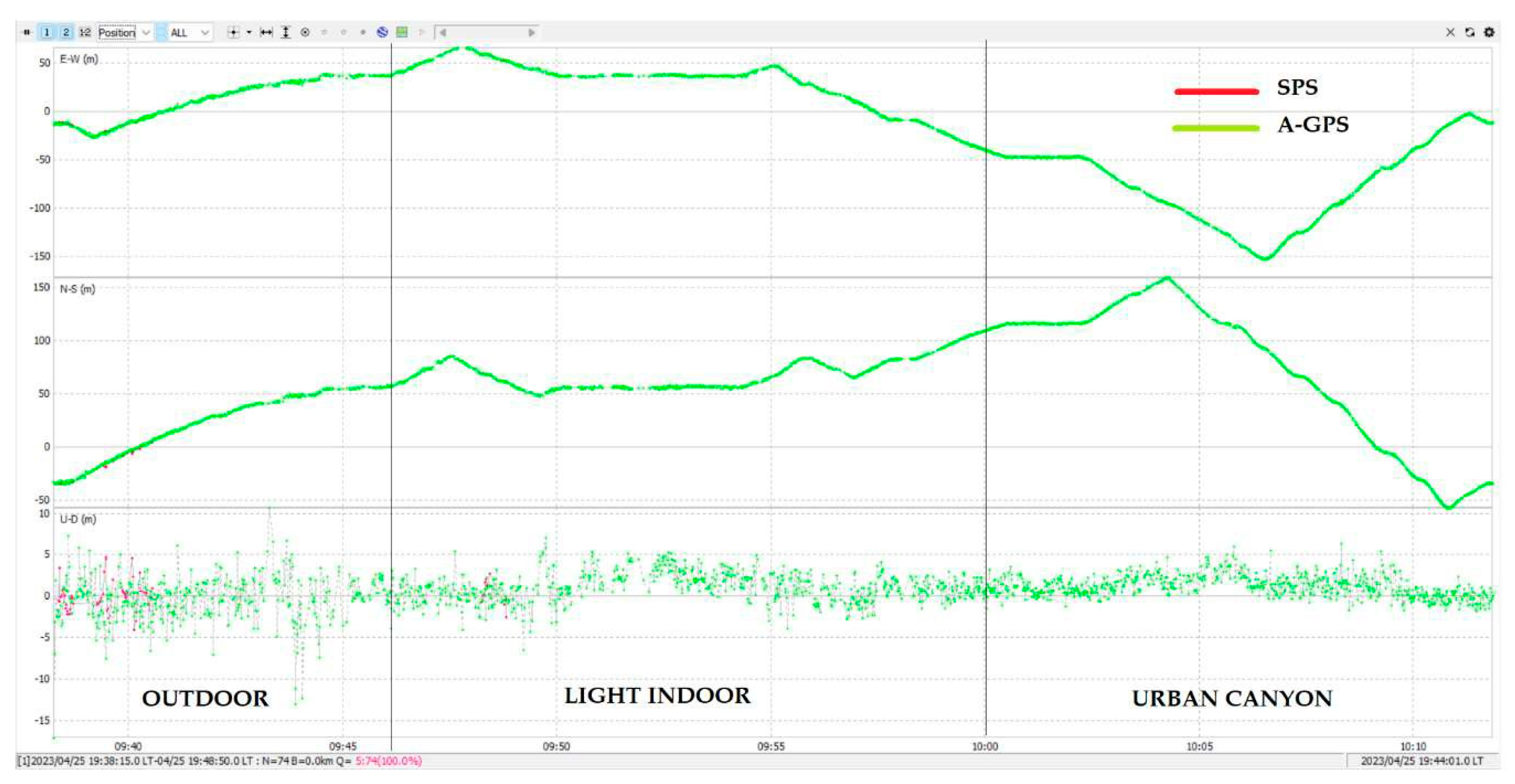
Figure 2 shows the measurements in the ENU coordinates and their behaviors in the different scenarios.
5. Discussions
The scenario is a car trajectory in the city with different exposure levels to obstacles, like high buildings, trees, and narrow streets, with two smartphones, including one operating only with standalone positioning, and the other operating with A-GNSS and 4G coverage. The GNSS data recollected are evaluated based on road sections, in an outdoor environment, and the worst SPS error is 10 (m), compared with the assisted solution that reaches 50 (m). The TTFF for the three scenarios is 5 (s), with SPS being 20 (s). Data availability refers to maintaining a fixed position while measuring every second without losing the signal. In SPS, there is only 50% of available data; this is because even when the smartphone is in an open sky area with visible satellites and registered observation data in the Rinex file, the quality of the signals are not sufficient to be demodulated by the GNSS chip, so there is a loss of data for the scenario of light indoor, and for the urban canyon scenario, the data availability is null. There are two reasons to justify why the assisted GNSS maintains a fixed position during the entire trajectory: The first is that the assisted data consist of sending ephemeris, clock, and almanac information that is stored in the smartphone’s cache memory to be used as a reference to compute the PVT solution even when the smartphone can track the signal from the satellite. The second is that the advantage of the power coverage and frequency operation for 4G is 1700/2100 MHz, where the higher the frequency, the shorter the wavelength, so it can pass through the elements in harsh indoor scenarios, providing an availability service of 99.99%, and therefore guaranteeing the transmission of assisted data, but the high accuracy will depend on an external factor. In conclusion, A-GNSS permits high data availability, a low time needed to fix it, and better accuracy than SPS, thus reducing the processing complexity and increasing the smartphone’s sensitivity in harsh environments.
Table 1 summarizes the results.
Author Contributions
Conceptualization, M.Z.H. and Á.M.; Methodology, M.Z.H. and Á.M.; Validation: Á.M.; Supervision: A.A.; Writing—Review & Editing: Á.M., A.A. and M.J.J. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Dataset available on request from the authors. The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Mi 8 Specs Xiaomi UK. Available online: https://www.mi.com/uk/mi8/specs/ (accessed on 20 April 2023).
- Zangenehnejad, F.; Gao, Y. GNSS Smartphones Positioning: Advances, Challenges, Opportunities, and Future Perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef] [PubMed]
- Steigenberge, P.; Thoelert, S.; Montenbruck, O. GPS and GLONASS Satellite Transmit Power: Update for IGS Repro3; Technical Note; German Space Operation Center DLR/GSOC TN 19-01: Munich, Germany, 2019. [Google Scholar]
- Pathak, V.; Thornwall, S.; Krier, M.; Rowson, S.; Poilasne, G.; Desclos, L. Mobile handset system performance comparison of a linearly polarized GPS internal antenna with a circularly polarized antenna. In Proceedings of the IEEE Antennas and Propagation Society International Symposium. Digest. Held in conjunction with: USNC/CNC/URSI North American Radio Sci. Meeting (Cat. No.03CH37450), Columbus, OH, USA, 22–27 June 2003; IEEE: New York, NY, USA, 2003. [Google Scholar] [CrossRef]
- Van Diggelen, F. A-GPS: Assisted GPS, GNSS, and SBAS; Artech House: Boston, London, 2019. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).






{kind=link}
{kind=link}