
Contemporary Tools for the Cure against Pernicious Microorganisms: Micro-/Nanorobots
by
 , and
, and
Mustafa Sami Ozaydin
1,†, 
Lorin Doganturk
2,†,
Fulden Ulucan-Karnak
3,4 ,
,
Ozan Akdogan
2,5,* and
Pelin Erkoc
6,*
1
Faculty of Arts and Sciences, Istanbul Technical University, 34469 Istanbul, Turkey
2
Faculty of Engineering and Natural Sciences, Bahcesehir University, 34353 Istanbul, Turkey
3
Institute of Health Sciences, Department of Medical Biochemistry, Ege University, 35100 Izmir, Turkey
4
Faculty of Engineering, Department of Chemical Engineering, Bogazici University, 34450 Istanbul, Turkey
5
NANOTerial Technology Corporation, 34353 Istanbul, Turkey
6
Institute of Pharmaceutical Biology, Faculty of Biochemistry, Chemistry and Pharmacy, Goethe University Frankfurt, 60438 Frankfurt, Germany
*
Authors to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Prosthesis 2022, 4(3), 424-443; https://doi.org/10.3390/prosthesis4030034
Submission received: 16 June 2022
/
Revised: 25 July 2022
/
Accepted: 2 August 2022
/
Published: 5 August 2022
(This article belongs to the Special Issue Antiviral and Antimicrobial Surface Design Strategies)
Abstract
:One of the most pressing concerns to global public health is the emergence of drug-resistant pathogenic microorganisms due to increased unconscious antibiotic usage. With the rising antibiotic resistance, existing antimicrobial agents lose their effectiveness over time. This indicates that newer and more effective antimicrobial agents and methods should be investigated. Many studies have shown that micro-/nanorobots exhibit promise in the treatment of microbial infections with their great properties, such as the intrinsic antimicrobial activities owing to their oxidative stress induction and metal ion release capabilities, and effective and autonomous delivery of antibiotics to the target area. In addition, they have multiple simultaneous mechanisms of action against microbes, which makes them remarkable in antimicrobial activity. This review focuses on the antimicrobial micro-/nanorobots and their strategies to impede biofilm formation, following a brief introduction of the latest advancements in micro-/nanorobots, and their implementations against various bacteria, and other microorganisms.

1. Introduction
Bacteria can easily spread through the air, water, food, and living vectors and cause serious infections that have long been known and affect public health. Their ability to spread makes it harder to detect or treat related diseases. Scientific research has shown that infectious diseases are a major cause of morbidity and mortality throughout the world, accounting for around half of all fatalities in tropical nations and up to 20% of deaths in the United States [1]. At the same time, approximately 33,000 individuals die each year as a direct result of an infection caused by antibiotic-resistant bacteria, with the burden of these infections being comparable to influenza, tuberculosis, and HIV/AIDS combined [2]. Due to difficulty in the dissemination of infections and inadequate diagnosis and treatment methods, outbreaks of epidemics caused by drug-resistant germs and previously identified disease-causing microbes constitute a substantial threat to public health [1]. It is also important to consider the economic impact of antibiotic resistance. Increased resistance leads to higher costs associated with more expensive antibiotics (when infections become resistant to first-line antimicrobials, treatment must be switched to second- or third-line antimicrobials, which are nearly always more expensive), specialized equipment, longer hospital stays, and patient isolation procedures. Death and productivity loss are two societal costs [3]. Because of shifting patterns of infectious disease and the emergence of bacterial strains resistant to conventional medicines, new techniques to treat bacterial infections are urgently needed [4]. Although the broad use of any antibiotic will certainly generate resistance in microbes over time, several antibiotics have served humanity well for 25 years or more before becoming obsolete. After a period of disuse, which has been attributed to side effects as well as ineffectiveness due to resistance, urgent attempts have been made to reintroduce several ancient antibiotics with a revised dosing schedule. Because of their severe side effects, several medications had previously been removed from clinical trials. Unsurprisingly, resistance to these revived antimicrobials has developed quickly [5].
Bacterial infections are commonly treated with wide-spectrum antibiotics. Despite the variety of drugs used for treatment, inadequate antimicrobial therapy, which is generally considered as the failure to treat the infection effectively, causes the appearance of infections due to antibiotic-resistant bacteria. The reason that contributes to the inadequacy of antimicrobial treatment of patients treated in hospitals is excess antibiotics in the past, use of broad-spectrum antibiotics, long duration of mechanical ventilation, and the presence of invasive devices. A study showed that inadequate antimicrobial therapy was administered in approximately 26% of patients diagnosed with an infection, which affected the hospital mortality rate [6].The location, species diversity, and growth patterns of bacteria in human chronic diseases have advanced over the past few decades. The incorporation of new molecular-based technologies into the clinical diagnostic process has accelerated the detection and identification of infectious diseases [7].
Multidrug resistance (MDR) is a type of acquired resistance of microorganisms and cancer cells to chemotherapy drugs with distinct chemical structures and mechanisms of action. MDR is caused by the overexpression of several proteins that extrude the chemotherapeutic from the cell, lowering its concentration below the effective level [8]. MDR can be conferred by a variety of transporters that remove drugs from cells, such as adenosine triphosphate binding cassette (ABC) pumps or P-glycoprotein (P-gp), a promiscuous drug efflux pump [9]. Based on gene structure, amino acid sequence, domain organization, and phylogenetic analysis, these ABC transporter families, which are expressed in tissues such as the liver, intestine, kidney, and brain, are divided into seven subfamilies (ABCA to ABCG) [10]. Bacteria can be resistant to one or more classes of antimicrobials, and they can be classified as multidrug-resistant bacteria, (i.e., resistant to three or more classes), extensively drug-resistant bacteria, (i.e., resistant to all but one or two classes), or pan drug-resistant bacteria, (i.e., resistant to all available classes). Antimicrobial resistance to antibiotics is a growing global problem, failing even the most recent types of effective antibiotics, indicating that the need for a new molecule arsenal could no longer be delayed [11].
As an alternative to antibiotic delivery, nitric oxide (NO) delivering nanorobots were used for the treatment of MDR in cancer cells [12,13]. NO has been known to act on a wide spectrum of processes, such as the differentiation, proliferation, and cell death of immune cells. Depending on its concentration, NO has two different antibacterial effects: at low concentrations NO functions as a signaling molecule that supports the growth and functioning of immune cells, and at high amounts, NO kills target pathogens or inhibits their activities [14]. Therefore, NO delivery by micro/nanorobots might be a promising technology for the treatment of MDR in inflammation-related diseases including recurrent bacterial infections.
Micro/nano-robots can overcome many difficulties in blood circulation by performing a specific targeting with reduced drug concentration, reducing side effects, and lowering the cost of work [15]. The targeting process is based on active or passive targeting mechanisms that are relied on the enhanced permeability and retention (EPR) effect, especially in tumor treatment [16]. This EPR effect has not been fully understood in infections, but it is known that infection prevents drainage by obstructing outflow and increasing interstitial pressure. Therefore, infection causes a long-term biochemical cascade that leads to vascular permeability enhancement while promoting macromolecular retention. The overall result is increased macromolecule permeability and retention [17]. In biosensing, another field of study, micro-/nanorobots can autonomously detect environmental factors such as biomolecules, temperature, and pH [18]. It assists in accessing narrow capillaries or tissues through remote editing and imaging navigation and delivery and biosensing studies and aids in minimally invasive surgery [19]. The use of micro-/nanorobots within the scope of antimicrobial therapy, which can be modified for this purpose and on-demand and reach the body parts that cannot be reached by most methods, has enabled many innovations. Evolving technology allows micro-/nanorobots to go under harsh conditions and to ensure that treatment is carried out safely and quickly. As a result of the treatments, it is very pleasing that they do not leave any long-term side effects or toxicological consequences. All these reasons have shown that the use of these micro-/nanorobots is promising within the scope of antimicrobial therapy [20,21].
2. Overview of Micro-/Nanorobots
Realizing the vision of the 1966 movie “Fantastic Voyage” has become possible with the developments in micro-/nanorobots during the last decade. Especially in the previous five years, significant progress has been made in providing therapeutic and diagnostic agents to previously inaccessible body parts on account of the micro-/nanorobots [22]. Micro-/nanorobots, which have high-efficiency characteristics in biological functions, have various propulsion mechanisms. These propulsion mechanisms can be grouped as fuel-based and fuel-free. Micro-/nanorobots can be actuated by external stimuli such as electrical and magnetic fields, light, and ultrasound in a fuel-free way. On the other hand, fuel-based propulsion is usually induced by chemical reactions via the brake down of molecules by catalysts (Figure 1A) [23]. Web of Science and Scopus databases were reviewed with “antimicrobial, ultrasound, electric field, magnetic field, and driving mechanism” keywords on 18 July 2022. In Figure 1B, the percentage of micro-/nanorobot articles published in the last 5 years can be seen regarding driving mechanisms. Chemically, light, and magnetically activated driving mechanisms are leading. Comparisons in each year are given as a bar graph in Figure 1C. Attention to light activating mechanisms is increased, and combined activation is decreased over the years. Chemical and magnetic activation mechanisms are keeping their importance. Ultrasound and electrical activation mechanisms have almost the same percentages.
The type of fuel source and loading capacity are essential points that determine the propulsion efficacy of these catalytic nano-sized robots. Chemicals such as hydrogen peroxide (H2O2) or biomolecules, such as urea, glucose, and adenosine 5′-triphosphate (ATP), have been widely used as fuel sources [24]. One of the most preferred among these fuels is H2O2 [25,26]. H2O2 is broken down into oxygen and water in the presence of a catalyst, such as platinum (Pt). The resulting oxygen can provide the movement of the engine. Since the fuels generally used for propulsion are not bio-compatible, the toxicity problem is a limiting factor for these systems. To overcome such problems, biohybrid and remotely controlled fuel-free micro-/nanorobots have been designed [27]. Many microorganisms are used for the design of biohybrid molecular robots, among them, flagellated bacteria are the most studied microorganisms. Bacteria are preferred and stand out in studies because of their autonomous properties of converting chemical energy into mechanical energy, and excellent swimming behavior in microenvironments. In addition, bacteria can be manipulated to move in different directions with oxygen, temperature, pH, and different chemoattracts [28].
Another biohybrid type of micro-/nanorobots is based on eukaryotic cells, such as red blood cells (RBC), leukocyte cells, and sperm cells [29]. Red blood cells can carry a high amount of payload. In addition, their ability to stay in the bloodstream for 120 days and escape the immune system makes them unique. They can be made sensitive to light or magnetic fields via surface modifications. The second type of cell utilized as biohybrid microrobots belongs to the innate and adaptive immune system, leukocytes. Modified macrophages and neutrophils can provide longer circulation times and access to hard-to-reach places by evading the immune attack. Macrophages and neutrophils are examples of leukocytes that can be used for the micro-/nanorobots [30]. Another example is sperm-based micro-/nanorobots, which are preferred owing to their capability to swim in the human body, and they have been shown to preserve the pharmacokinetic properties of loaded drugs and can provide a controlled release [31]. Additionally, there are studies on manufacturing biohybrid microrobots with other cell types such as cardiomyocytes [32], nerve cells [33], and xenobots from the living stem cells of the African clawed frog [34].
Fuel-free micro-/nanorobots are controlled by external stimuli and can float efficiently in high ionic strength and viscosity environments [35,36] An external stimulus such as an electrical field provides high motion control and a unique driving mechanism due to the clean energy of the electric field. In an example study, combined AC and DC electric fields were used to precisely align and actuate catalytic nanorobots [37]. However, a safety problem has arisen in studies because of the high voltage ranges, and the high conductivity of biological media impedes motion control, which causes practical concerns (36).
Another external, natural, and abundant energy source is light that can remotely propel engines without the need for a complex setup and any toxic fuel [38]. Light-based micro-/nanorobots may change their mechanism of action depending on many parameters. Primarily, photochromic, photocatalytic, photosensitive, and photothermal materials are used for the conversion of light energy to provide a driving force for the motion of the micro-/nanorobots [39,40].
The third and most used actuation mechanism is the magnetic field with biocompatible energy transmission. Compared to electric and light fields, the magnetic actuation is simple, more precise, and non-invasive and penetration depth is higher for biological tissues [41]. With these advantages, magnetically driven micro-/nanorobots address most disadvantages of the aforementioned propulsion mechanisms [42].
Another driving source is ultrasound, which has shown high efficiency at high speeds, high ionic strength, and high viscous biofluids. In addition, safe and efficient ultrasound-based micro-/nanorobots have demonstrated excellent biocompatibility [43]. Ultrasound at low enough amplitudes, specifically in the MHz frequency range, is not harmful to biological tissues and provides a convenient and well-controlled way to actuate micro-/nanorobots [44].
With the increasing number of studies in recent years, both non-fueled and chemically fueled micro-/nanorobots have become promising tools to revolutionize the field of biomedicine. Micro/nano-robots are used in the delivery of drugs, enzymes, genes, and proteins, and for nano-surgery, detoxification, and diagnosis processes [45,46,47]. Moreover, thanks to the advancements in the field so far, micro-/nanorobots have been investigated as promising tools for antimicrobial purposes.
Interactions of Micro-/Nanorobots with Microorganisms
Antibiotics, for a long time, have been known as the gold standard to fight bacterial infections. This intensive use has led to the development of antibiotic resistance by targeting bacteria over time [48]. Due to this risky situation, the researchers tried to fight against the resistance of bacteria by increasing the effects of antibiotics in different methods [49] or they have tried to produce new antimicrobial treatments using methods, such as photothermal therapy [50]. In microrobots that can provide a mechanism of action with biohybrid fuel, exogenous fuel, and endogenous fuel, exogenous fuels exhibit antimicrobial diffusion but also show good catalytic activity. Microrobots with endogenous fuel, which are self-propelled, are designed because catalytic activities cause toxic effects [51]. Thanks to the microrobots working with the external field, multi-directional movement and access to areas that are physiologically difficult to reach are provided [52]. Effective antimicrobial nanorobots were obtained by connecting antibiotics, antimicrobial peptides [53], and enzymes such as lysozyme [54] to microrobots. In addition, nanorobots used in methods such as photodynamic therapy [55], mechanical cell lysis [56], and hyperthermia have been effective antimicrobial tools.
In particular, the precise and fast movement mechanisms of micro-/nanorobots from simple aqueous solutions to complex environments, including cell cultures or animal tissue, made micro-/nanorobots one step ahead for antimicrobial treatments [57]. In Figure 2, it is seen that chemical, light and magnetically activated micro-/nanorobots articles are the most increased in all or antimicrobial-specific applications. In the following part of this review, we will focus on the breakdown of the biofilm via microrobots.
3. Removal of Biofilms
Biofilm is a microbiome structure with many bacterial colonies or a single type of cell in a group that adheres to the surface. They contain bacterial cells surrounded by a matrix of extracellular polymeric materials such as exopolysaccharides [58]. These complex and mechanically stable scaffolds act as mechanical barriers for antibacterial drugs and protect bacteria from the effects of the applied drugs. Effective destruction of biofilms poses a technical problem and current antimicrobial approaches are largely inadequate [59]. It has been demonstrated that prolonged incubations with high antibiotic concentrations can result in appreciable biofilm reductions. Specific targeting has been reported in this manner as a key strategy for resolving this issue [60]. This is because, in contrast to systematic application, higher localized antibiotic concentrations can be maintained for a longer period, thus, helping to eradicate antibiotic resistance [61]. Furthermore, precise targeting makes it easier to mechanically remove biofilms, enabling quick clearance from biofilms. Therefore, new technologies are needed to effectively target the biofilm structure, kill bacteria, and remove the degradation products. Robotics may well be used to achieve a “kill-degrade-and-remove” biofilm disruption strategy [62].
In a study, Villa et al. investigated the effect of the micro-/nanorobots on biofilm removal. A tubular TiO2/Pt microrobot was manufactured as an efficient bubble propellant, which is obtained by the catalytic decomposition of Pt on the inner surface of NPs in the presence of H2O2. For this work, a dental biofilm model consisting of a mixture of dental strains of Streptococcus gordonii, Veillonella parvula, and Fusobacterium nucleatum was selected. H2O2 at concentrations of up to 1% by weight has been stated to be non-toxic to the in vitro biofilm model system. In the absence of H2O2, TiO2/Pt microrobots had strong antibacterial activity against the tested biofilm model. It has been observed that the combination of TiO2/Pt microrobots with 1% H2O2 by weight has produced the highest biofilm removal with up to 95% killing effect. Terephthalic acid was used as a probe molecule that captures hydroxyl radicals to produce 2-hydroxyterephthalic acid. As a result, the amount of 2-hydroxy terephthalic acid increased over time and the effect of TiO2/Pt microrobots on the biofilm destruction and the viability of surface epithelial and epidermis cells was investigated. The trials performed on human embryonal kidney cells (HEK293T) and keratinocyte cell lines (HaCaT) showed no significant toxicity. Finally, the ability of microrobots to stimulate nitric oxide (NO) production was also evaluated since the production of NO molecules by macrophages is commonly associated with the activation of the immune system against bacterial infections (Figure 3) [63].
Microrobots consisting of porous Fe3O4 meso-particles (Fe3O4 MPs) with paramagnetic features can be used for biofilm treatment. It has been supported by studies that the p-Fe3O4 swarm can be driven by a rotating magnetic field generated by a three-axis electromagnetic coil system or a permanent magnet system. The average velocity of the p-Fe3O4 swarm driven by a permanent magnet system was about 473 µm s−1 in phosphate-buffered saline (PBS) solution; however, it decreased to 264 µm s−1 in Escherichia coli (E. coli) biofilm due to the viscoelastic resistance. The p-Fe3O4 swarm has been shown to exhibit improved catalytic activity at pH 3–4. The bacterial viability was shown to decrease to 0.3% and 0% for Gram-negative E. coli and Gram-positive Bacillus cereus (B. cereus), respectively, and p-Fe3O4 MPs, actuated with a rotating magnetic field, were used for the destruction of the formed E. coli biofilm. The result showed that the killing efficiency for bacterial cells in the biofilm is up to 99.99%. Similar results were obtained in studies on Gram-positive B. cereus biofilm. p-Fe3O4 MPs showed good reusability after biofilm removal and can be produced at a low cost [64].
For the removal of E. coli biofilms, a hybrid enzyme/photocatalytic microrobot based on urease immobilized titanium dioxide (TiO2)/cadmium sulfide (CdS) nanotube bundles were constructed. The microrobot can swim in urea and uses urea as a biocompatible fuel in response to visible light. The enzymatic conversion of urea into ammonia and carbon dioxide results in a concentration gradient, which drives the microrobot via self-diffusiophoresis. Due to the generation of reactive radicals, these microrobots can remove nearly 90% of bacterial biofilm after 2 h of illumination, whereas bare TiO2/CdS photocatalysts (non-motile) or urease-coated microrobots in the dark have no toxic effect (Figure 4). These findings suggest a synergistic effect between the enzyme’s self-propulsion and the photocatalytic activity induced by light stimuli [65].
In a different study, the focus was on designing near-infrared light (NIR)-guided mesoporous silica half-shell nanorobots (HSMV). A layer of mesoporous silica is deposited on the SiO shell for vancomycin (Van) loading, and gold nanoparticles (AuNPs) are embedded in the inner surface of the SiO shell to form the micro-/nanorobots. Photothermal conversion of AuNPs has been reported to provide high therapeutic efficacy even at a moderate local temperature (<45 °C) that does not damage healthy tissues. HSMV exhibited concentration and NIR laser power-dependent photothermal conversion performance. When they were exposed to continuous NIR laser irradiation for 5 and 10 min, respectively, more than 65% and 90% of the drug were released. Next, the ability of HSMV to penetrate biofilms was tested on Staphylococcus aureus (S. aureus) biofilm. It has been shown that HSMVs penetrate and spread rapidly throughout the biofilm after 5 min of laser exposure in vitro. Efficacy was also evaluated on a mouse implant-associated periprosthetic infection (PPI) model. In the HSMV + NIR light group, the temperature reached approximately 45 °C, and the wound size of the mice in the treatment group was shown to decrease rapidly, unlike in the other groups. In addition, it has been reported that these wounds become crusted and completely healed after seven days. Then, implanted catheters were removed, and in the treatment group with HSMV + NIR, the catheters had little bacteria, and biofilm was destroyed [66].
In designing multifunctional magnetically controlled and catalytic antimicrobial nanorobots, it was observed that the catalysis effect destroyed the biofilm, and then the biofilm was cleaned with an external magnetic field. Within 24 h of cleaning, there were no growths in the area under review, and the nanorobots were retrieved with a permanent magnet [67]. Another perspective on biofilm cleaning is the use of zinc oxide-silver (ZnO: Ag) nanorobots. In the ZnO: Ag nanorobots, self-propulsion is aimed to be reached at low H2O2 concentration, thanks to the photocatalytic effect of Ag. The velocity was measured as 4.5 ± 0.8 µm s−1 with 1% of H2O2. In addition to the movement facilitating property of Ag, it increases the bactericidal effect, as well. An approximate 80% killing was observed on Pseudomonas aeruginosa (P. aeruginosa) and S. aureus biofilms. The effect was increased with the rising number of nanorobots; however, the toxicity was also increased [68].
Insufficient penetration of antibiotics causes their ineffectiveness in the treatment of biofilm-associated infections [69]. Microrobots facilitate the penetration of antibiotics and increase their effectiveness. In addition, it reduces cell–cell communication between bacteria. Another problem in biofilms is the extracellular polymeric substances (EPS), which are fundamental constituents of biofilms. EPS protects bacteria from stress and the host immune system. EPS can be effectively cleaned by the mechanical force produced by the displacement of the microrobots, which can help to reduce the risk of biofilm growth.
In summary, microrobots have shown great progress in many tasks such as targeted cargo delivery, and physical and chemical deprivation of persistent biofilms [70]. In addition, the magnetic field easily penetrates most biological and synthetic materials under suitable conditions and can direct particle motion toward difficult-to-reach areas [42]. In the following part of this review, the focus will be on the bacteria species mostly used for investigating the antimicrobial activity of micro-/nanorobots, particularly E. coli and S. aureus, and the other microorganisms reported in recent studies.
4. Effects of Micro-/Nanorobots on Various Microbial Species
4.1. Escherichia coli
Multi-drug resistance from E. coli bacteria remains an increasingly dangerous threat to human health [71]. In addition, E. coli has an unmissable effect on water quality and is the cause of the most common urinary tract infection in children [72]. For example, the cleaning of E. coli in contaminated drinking water using alginate/chitosan-based self-propelled microrobots was examined by Delezuk et al. The propulsion started with the interaction of magnesium (Mg) with water. They report that the designed molecular robots can speed up to 36.5 µm/s and 72.6 µm/s in drinking and seawater, respectively. The efficiency of the molecular robot to kill bacteria was 96% in 10 min. In another trial in San Diego County, more than 90% of E. coli killing efficiency was achieved with the environmentally friendly micro-/nanorobots, which are also based on chitosan [73].
The study conducted by Vilela et al. aimed to clean polluted water using Ag-based Janus microrobots that produce H2 because of the interaction of Mg and water. In microrobots’ design, Au was used for bacterial adhesion and Ag for antibacterial effect. The highest velocity was observed at pH 5, because of the increase in Mg degradation in acidic solutions. In addition, the continuous Mg consumption reduced the propulsion duration of microrobots, and it has been reported to have a shorter life in an acidic environment than in a neutral environment. In this study, E. coli was used as model bacteria. The experiments, which were performed in water and PBS, resulted in 40% and 25% of biocidal activity in water and PBS, respectively. In a recent experiment, swimming for more than 15 min increased the kill rate [74].
Lectin-modified nanorobots can also isolate E. coli by selective binding properties to cell wall oligosaccharides. First, polyaniline (PAN)/Pt double-layer microtubes are fabricated, and nickel-gold (Ni/Au) deposition is applied for magnetic orientation and surface functionalization. In the designed nanorobots, Pt catalyzes H2O2 and creates bubble-induced propulsion. E. coli in the urine is precisely detected and captured, however a decrease in the velocity was observed after bacteria binding [75].
Additionally, electrodeposition-designed Au/Ni/Au nanowires with magnetic drive and ultrasonic power. The lectin-modified nanorobots capture E. coli in PBS. Then, S. aureus was successfully caught by functionalizing nanorobots with an anti-protein antibody. As a result of this capture, a decrease in bacterial velocity occurred. Finally, nanorobots were coated with a polypyrrole-polystyrene sulfate (PPy-PSS) multilayer, and pH-dependent release of electrostatically bounded drug molecules was shown in acidic environments [76]. The bacteria-killing potential of enzyme-modified mesoporous silica nanoparticles (MSNP) was investigated [74]. Urease, lysozyme, and the combination of urease and lysozyme were conjugated on the surfaces of the designed nanorobots for the antibacterial applications of urinary tract infections. Carbonate and ammonia are formed by the breakdown of urea by urease, which caused the death of E. coli [77]. In research with different nanorobot types, E. coli was killed effectively and quickly. In studies conducted in different environments, 96% killing was swiftly achieved, especially in the study conducted by Delezuk et al. This ratio shows that successful targeting and killing can be achieved with nanorobots.
4.2. Staphylococcus aureus
S. aureus is a Gram-positive bacterium that causes skin and soft tissue infections in hospitals or communities [78]. Antibiotic treatment of bacteria, which can cause severe infections if it enters the tissues or bloodstream, is not very effective because it tends to form biofilms, although it develops resistance to antibiotics over time [79].
Chen et al. desired to present a new application that expands the use of magnetotactic bacterial microrobots [80]. To generate simple magnetotactic bacterial nanorobots, the surface of magnetotactic bacteria MO-1, which have unique organelles with magnetic properties called magnetosomes [81], were coated with rabbit anti-MO-1 cell polyclonal antibody to capture protein A. MO-1 nanorobots were shown to bind to S. aureus specifically but not to E. coli, owing to their naturally expressed protein A. The capture of S. aureus by MO-1 nanorobots was revealed for the first time and testing the antibacterial performance of magnetotactic bacteria on a microfluidic chip provides a new paradigm for rapid separation of pathogens using magnetotactic bacteria [80]. In a continuation study by Chen et al., a low frequency and low heat generating an oscillating magnetic field (sMF) was used to kill the S. aureus pathogen by magnetotactic bacteria. The designed nanorobots were functionalized similarly. With the developed sMF generators, the controlled release of magnetotactic bacteria was achieved. To further confirm the effect of MO-1 cells under sMF, a mouse S. aureus infection model was established, and the method was able to enhance the healing of S. aureus-infected wounds in vivo [82].
Magnetic hyperthermia was also proposed to be used for improving the therapeutic efficiency of the magneto tactic MO-1 bacteria in skin infections caused by S. aureus. MO-1 cells were effectively coated with rabbit anti-MO-1 polyclonal antibodies, and the heating capacity of magnetic nanocrystals of MO-1 cells with the alternating magnetic field was analyzed. It was observed that the temperature of the S. aureus suspensions increased significantly from 27 °C to about 43 °C in the presence of MO-1 cells upon hyperthermia application. The number of viable S. aureus cells was decreased by approximately 50%. After these successful results, the length of the wound infected with S. aureus was measured on mouse tails to evaluate the effect of magnetic hyperthermia on wound healing, and it was observed that magnetotactic MO-1 bacteria-mediated hyperthermia extensively promoted wound healing [83].
It has been discovered that physiologically interfaced platelet membrane-coated nanorobots (PL-nanorobots) made of the magnetic helix can bind to bacteria and other pathogens through the plasma membrane of human platelets. An essential feature of platelet-mimicking nanorobots is their ability to resist biofouling, thus allowing the nanorobots to be propelled in biological fluids permanently and efficiently. The propulsion performance of PL nanorobots and bare nanorobots in different environments was compared, and it was observed that they were significantly faster than the speeds of bare nanorobots. The subsequent experiments evaluated the selective binding and rapid isolation of Shiga toxin (Stx), a toxin produced by E. coli that can induce hemolytic uremic syndrome. They confirmed the efficient and selective binding of PL nanorobots to Shiga toxin in the Stx-FITC solution, and fluorescence intensity of 51% was measured. The therapeutic potential of PL nanorobots has been studied by in vitro experiments. MRSA252, a methicillin-resistant Staphylococcus aureus (MRSA) strain that expresses a serine-rich adhesin (SraP) for platelets capable of binding to platelets, was used as a model pathogen for exploring the adhesion of PL-nanorobots. In summary, PL nanorobots exhibit a ten-fold increase in fluorescence intensity compared to all other groups, indicating the significant adhesion of bacteria to PL nanorobots [84].
The studies carried out to kill S. aureus have especially focused on hyperthermia applications and a high targeting was reported to be achieved by the microrobots. However, most of these studies, as proof-of-concept, were performed in liquids or in vitro.
4.3. Other Microorganisms
The new microrobotic strategies represent effective tools for detecting the presence of biological threats and eliminating their potent harms. Some bacteria can form spores, which are resistant to treatments and even survive in the environment for decades. For instance, for the treatment of Bacillus anthracis (B. anthracis), a dangerous spore that causes anthrax in humans and animals, the electrodeposition method was used to design (COOH-PPy): poly polystyrene sulfonate (PEDOT)/Ni/Pt multilayer microrobots. The anti-B antibody, which will ensure the capture of the spore with the carboxyl groups on the outer surface of the molecular robot, has been modified by covalent bonding. While the Ni layer in the molecular robot is used as a magnetic guide, the Pt layer provides the propulsion mechanism by creating O2 bubbles using H2O2 fuel. The study showed that in the presence of 3% H2O2, 90% of the microrobots could float in an aqueous solution at a speed of ∼250 μm s−1. This method might be an example of dynamic multifunctional systems that swiftly recognize, isolate, gripe, and disrupt biological threats [85].
One of the most common Gram-negative pathogens associated with a wide range of infections, including pneumonia, bloodstream infection (BSI), meningitis, urinary tract infection (UTI), and a pyogenic liver abscess is Klebsiella pneumonia (K. pneumonia) [86,87]. The bacteria cause many morbidities and mortality worldwide [88]. Furthermore, K. pneumonia is recognized for its ability to build biofilm and has a high level of antibiotic resistance [89]. Spirulina platensis and magnetized spirulina (MSP) consisting of magnetic Fe3O4 NPs were produced by Xie et al. to study K. pneumonia. The development of polydopamine (PDA) coated MSP magnetic microswimmers allowed for the investigation of the photothermal effect using NIR light. In the experiment, irradiation was performed continuously for 6 min, the temperature rose as the irradiation period was increased until it reached the required 50 °C for antibacterial treatment. These results confirmed that the PDA coating could improve the photothermal effect. It was also reported that the enzymes of K. pneumoniae were denatured when the temperature already reached 65 °C after 4 min of irradiation, and the bacteria were killed upon damage to the membrane proteins/lipids. Next, the mouse subcutaneous K. pneumoniae infection model was tested and on day 12, brand new intact epithelialization was observed in the wound region, indicating a highly completed resolution of the infection [90].
Helicobacter pylori (H. pylori) infection has become a major human gastrointestinal bacterial infectious illness for long years [91]. In the study of Ávila et al., in vivo treatment of H. pylori, infection was aimed at binding CLR antibiotics to Mg-TiO2 Janus microrobots. The CLR antibiotic is coated with a thin outer layer of chitosan for electrostatic adhesion of the microrobots to the mucosal layer in the gastric wall while facilitating microrobots activation and autonomous release of CLR with the aid of PLGA. It was tested in vitro using a simulated gastric fluid (pH~1.3) to study the efficient propagation of drug-loaded Mg-based microrobots in gastric acid. Fast and prolonged autonomous propulsion of CLR-loaded Mg-based microrobots with a hydrogen bubble with an average velocity of 120 μm s−1 in a gastric fluid simulant was demonstrated. In addition, it has been shown that the life of drug-loaded microrobots is around 6 min. It has been stated that the optimum pH is 1.3. After the successful results were obtained, it showed an effective bactericidal activity and killed 99.9% of the bacteria in the in vitro experiment. In addition, it was confirmed that drug-loaded microrobots made of Mg and other degradable materials self-destruct and disappear in the acidic environment with no apparent residue in tissue after releasing the CLR. In subsequent in vivo experiments, after 30 min and 2 h of sample administration, the mice were sacrificed, and the entire stomach was excised and opened. The in vivo experiments showed that powerful propulsion for tissue penetration and binding was achieved, and the drug-loaded robot could reach the whole stomach wall providing enhanced retention [92].
Pseudomonas aeruginosa (P. aeruginosa) is an opportunistic infection that is a major source of illness and mortality in people with cystic fibrosis and those who are immunocompromised [93]. For the investigation of antibacterial activity on P. aeruginosa, magnesium-based Janus micro-/nanorobots with superparamagnetic iron oxide nanoparticles (SPIONSs) have been developed. The cytotoxicity of mobile magnesium-based microrobots was investigated, and cell viability was reported to be approximately 80%, corresponding to 100 µg/mL of concentration. In addition, ampicillin, an antibiotic, was bound to the surface of the microrobots by direct conjugation. The antibacterial activity of the motile microrobots was investigated in vitro, and a 100% efficiency of killing the bacteria after 5 min of treatment was reported [94].
In a biohybrid system of Magnetosopirrillum gryphiswaldense (MRS-1) bacteria, mesoporous silica microtubes (MSM) and antibiotic ciprofloxacin (CFX) were used. The bacterium MRS-1 was chosen because it has an excellent capacity to sense and respond to the environment [95]. They can be guided externally and magnetically with the help of a self-produced magnetosome chain consisting of Fe3O4 and bipolar flagella [96,97]. Since mesoporous silica microtubes are biocompatible and have a high surface area, they are ideal for drug loading and delivery. In addition, the tubes provide a useful configuration with the bacteria to improve the swimming of the bacteria. MRS-1 bacteria are attached to the inner part of the tubes with the help of positively charged amine chemicals via Van-der-Waals and electrostatic interaction. A permanent magnet or magnetic coils move the created biohybrid structure. For the control of the drug release system, CFX is first loaded into the MSM, and the motility media is examined at pH values of 5.8 and 7.4. At the pH value of 7.4, there is no release after 24 h, while an effective release occurs at the value of 5.8. Then, the release in the acidic microenvironment of E. coli biofilm was investigated. MSM-CFX has incubated in E. coli biofilm for 48 h. After 24 h, most of the biofilm and bacteria were fluorescently labeled, indicating that drug release was triggered in the microenvironment of the E. coli biofilm. As a result of incubation for 24 h, the biohybrid structure caused degradation of 32% and after 48 h, the biohybrid structure caused a 55% reduction in the biofilm [98].
In addition to biohybrid designs of bacterial microswimmers, it has also been shown that other flagellated microorganisms, such as unicellular freshwater microalgae, can be used [99]. The study conducted by Zhang et al. aimed to remove severe acute respiratory syndrome coronavirus type 2 (SARS-CoV-2) from the environment by activating the click chemistry reaction of the angiotensin-converting enzyme 2 (ACE2) receptor in the algae model Chlamydomonas reinhardtii (C. reinhardtii), which has a fast-acting, long life, and straightforward function. The produced ACE2-algae-microrobot has been shown to float stably in drinking and river water environments, with a swimming speed of >100 μm/s. SARS-CoV-2 spike proteins were removed up to 95% by ACE2-microalgabots in various environments, including DI water, drinking water, and river water after 6 h of treatment. In contrast, the increase in the number of microrobots affected efficiency. It has been also shown that 85% of the pseudo-virus is effectively removed after 4 h of treatment in the water [100]. Vancomycin surface functionalization, antibiotic release by light irradiation, and bacterial inhibition studies have all been conducted on C. reinhardtii algae, which are harmless and do not induce immunity. The designed microrobots caused strong inhibition of B. subtilis growth with 365 nm UV treatment after 5 min. In addition, it has been shown that UV does not affect the viability of both algae and bacteria [101].
In studies on bacteria such as H. pylori and P. aeruginosa, close to 100% killing was achieved. In addition, it was observed that high targeting up to 95% was obtained in studies where algae were used as microrobots. These rates show that active targeting in vitro is possible. All studies that were mentioned in this part, were summarized in Table 1.
5. Discussion
5.1. Advantages and Disadvantages of Current Micro-/Nanorobots
People worldwide are struggling with various microbial infections that directly or indirectly cause deadly diseases. The development of antibiotic resistance, especially in bacteria-caused microbial diseases, makes it challenging to fight infectious diseases and results in severe morbidity and mortality in patients. With the help of developments in nanotechnology, micro-/nanorobots appeared as promising treatment tools in the biomedical and pharmaceutical fields. They exhibit tailorable activities according to their shapes, sizes, loads, and surface and physicochemical properties [67]. For example, micro-/nanorobots might reach the areas that are difficult to reach in the body, owing to their small size and different shapes. Hence, they can be useful in the future treatments of pathogenic bacteria-based biofilms [102]. Researchers have tried to prevent antibiotic resistance by providing specific targeting in antimicrobial studies with nanorobots, so it is thought that higher success can be achieved compared to traditional methods.
Although micro-/nanorobots have several advantages, such as real-time localization that can be provided by using common medical imaging techniques including X-ray, MRI, and ultrasound scans [103], there are some points to be critically considered before realizing their usage. The first of these is the delivery path of the given micro-/nanorobots. The navigation distance must be kept as short as possible and biological barriers should be kept in mind while designing, to deliver therapeutics to a targeted region efficiently [104]. Ensuring collective control is another issue. Creating collective micro-/nanorobots, which can act cooperatively and closely, while performing different tasks, would significantly improve their missions such as manipulation of objects, which would have high potential in the targeted biofilm disruption [105]. Another concern is the actuation or propulsion mechanism, which is divided into external control and chemical. In chemical energy-based motion, motion is achieved by converting chemical energy into mechanical or other forms of chemical energy. Although these micro-/nanorobots provide a high degree of autonomy with chemical energy, there is an increased risk of toxicity unless they are biocompatible [106]. Moreover, the fuel-loading capacity of the chemically catalyzed micro-/nanorobots is another factor limiting their long-term applications. The control of micro-/nanorobots by external fields enhances dynamic regulation and decision-making processes, such as motion and swimming speed control to release therapeutics at the right time and in the right place, and in addition, minimizes toxicity [107]. Finally, for establishing a long-term safety profile of micro-/nanorobots, the biodegradability, waste profile, immunogenic response, all, biocompatibility of the designed micro-/nanorobots should be carefully tested through animal and clinical trials [108]. In this manner, the studies carried out with FDA-approved nanoagents and/or materials make microrobots reliable and promising. Efficient retrieval after the operations is also crucial. For instance, magnetic micro-/nanorobots are recommended to collect back promptly via magnets to minimize damage to healthy tissues. Another important issue in microrobot design is the expenses. While external field-actuated microrobots can move without the need of fuel, for the use in the clinic, the real-life realization of them requires central medical facilities with expensive control systems, and professionally trained healthcare personnel. Thus, it is important to establish cooperation between the fields of medicine and engineering in order to produce microrobots that are biocompatible, therapeutically efficient, sustainable and affordable [109].
5.2. Recent Situation of In Vivo Antimicrobial Studies
In the dynamically developing field of micro-/nanorobots, their anti-microbial applications have also exhibited great enhancements. Consequently, the number of in vivo studies has been growing day by day. For example, in a study by Su et al. P. gingivalis periodontal disease in rats was demonstrated using a MnO2-based microrobot. In another in vivo study, NIR-driven parachute-like nanomotors loaded with miconazole nitrate (PNM-MN) were injected subcutaneously into mice. Combined with the combination of pharmacological and photothermal effects for the treatment of mice infected with Candida albicans, the mice recovered completely and showed a therapeutic efficacy superior to other treatments [110]. In the study conducted with AuNP/mesoporous silica nanorobot containing antibiotics injected into the implantation site of mice infected with S. aerus bacteria, mice were treated within 10 min by magnetic activation without damaging any healthy tissue [67]. Similarly, a dextran-coated Fe3O4 microrobot was used for the treatment of mice infected with S. mutans [111]. Many in vitro studies have been conducted in the water environment or in a liquid that is used as fuel for the catalytic motion, however, their real in vitro efficiency remains unclear.
Considering the above-mentioned in vivo studies, and the advantages and disadvantages of micro-/nanorobots, soon we will be witnessing their promising antimicrobial applications in medicine. For example, treatment of resistive infections or biofilms in easier-to-reach body regions for micro-/nanorobots, such as gastrointestinal and urinary tracts, ear, nose, and throat [112], could be the starting point, particularly for the autonomous and magnetically actuated systems. In addition, the usage of an external actuation, such as light and/or ultrasound waves, together with the high-technology medical devices would let us develop highly targeted and efficient treatments for subcutaneous, periodontal, and implant-associated infections, owing to their penetration ability through the skin.
5.3. Application Routes, Limitations, and Future Perspectives
To reach success in the process of antimicrobial treatments, there are crucial elements that must be considered. Mainly, controlling the accumulation of antibacterial drugs at the site of infection, increasing bactericidal therapeutic efficacy, limiting the interactions of antibiotics with the healthy tissue, and reducing toxicity risks, and reducing the killing effect of antibiotics on commensal microflora are pivotal factors to consider when designing carriers for specific and sustainable release of antibiotics. To create better antibiotic delivery systems, an effective strategy would be to create a system that responds to stimuli in one of two ways. In these options, the system either reacts autonomously and recognizes the bacterial environment or is sensitized to certain physical elements. These methods will increase the effectiveness, targeting abilities, and effectiveness of antibiotic treatments while reducing their negative effects [113].
One of the main conditions leading to the acceleration of the evolution of MDR and the unselective killing of beneficial bacteria is the tendency of using traditional broad-spectrum antibiotics. A new start-up company, Eligo Bioscience®, reported that they have been working on creating antimicrobials, whose spectrum and activity can be designed by using CRISPR-Cas (“programmable gene scissors”) technology. The company, which is conducting in vivo studies with carrier devices such as nanorobots, has been focused on delivering RNA-guided nucleases (RGNs) for targeting specific DNA regions in microbial populations. The usage of programmable RGNs might trigger the emergence of alternative antibacterial techniques that impose direct evolutionary pressure at the gene level [114]. The design of delivery vehicles such as nanorobots will be important to create RGNs that can target other strains, such as multidrug-resistant pathogens.
In addition to the proven effects of micro-/nanorobots on bacterial species, a few studies mentioned that they could be also used for the treatment of viruses [115]. Studies with the SARS-CoV-2 virus, which threatens public health, have shown that micro-/nanorobot applications can be useful for destroying viruses. Micro-/nanorobots can make the transportation of antiviral medicines an effective and simple process due to their modifiable surfaces, speeds, and motion control. The ability to carry antiviral agents, particularly suitable for pandemic and epidemic viruses such as HIV, Herpes, Ebola, ZIKA, and Dengue will open the door to target-specific treatments of these viruses in the future [100,115].
6. Conclusions
In this review article, important and recent examples of micro-/nanorobots in antimicrobial applications, promising to combat clinically relevant infections were presented and their action mechanisms were discussed in detail. In conclusion, the current research on micro-/nanorobots shows potential applications for various microbial infections; however, effective in vivo analysis is always needed for translation into clinical applications. Novel technologies such as 3D printing, xenobots, nanobots, and artificial intelligence-based technologies should be implemented into the existing studies to provide more smart, effective, remote-controlled, and user-friendly applications.
Micro-/nanorobots can actively deliver antibacterial agents in a targeted treatment with high accuracy, and motion control, which facilitates transport and improves access to difficult-to-reach areas of the body. Therefore, the usage of micro/nanorobot designs is expected to establish the groundwork for the next generation of antimicrobial applications in medicine.
Author Contributions
Conceptualization, M.S.O., L.D., O.A. and P.E.; writing—original draft preparation, M.S.O., L.D., F.U.-K. and P.E.; writing—review and editing, M.S.O., L.D., F.U.-K., O.A. and P.E.; visualization, M.S.O., L.D., F.U.-K. and P.E.; supervision, F.U.-K., O.A. and P.E. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Mahady, G. Medicinal Plants for the Prevention and Treatment of Bacterial Infections. Curr. Pharm. Des. 2005, 11, 2405–2427. [Google Scholar] [CrossRef] [PubMed]
- 33,000 People Die Every Year Due to Infections with Antibiotic-Resistant Bacteria. Available online: https://www.ecdc.europa.eu/en/news-events/33000-people-die-every-year-due-infections-antibiotic-resistant-bacteria (accessed on 10 August 2021).
- Prestinaci, F.; Pezzotti, P.; Pantosti, A. Antimicrobial resistance: A global multifaceted phenomenon. Pathog. Glob. Health 2015, 109, 309–318. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Taylor, P.W.; Stapleton, P.D.; Paul Luzio, J. New ways to treat bacterial infections. Drug Discov. Today 2002, 7, 1086–1091. [Google Scholar] [CrossRef]
- Dhingra, S.; Rahman, N.A.A.; Peile, E.; Rahman, M.; Sartelli, M.; Hassali, M.A.; Islam, T.; Islam, S.; Haque, M. Microbial Resistance Movements: An Overview of Global Public Health Threats Posed by Antimicrobial Resistance, and How Best to Counter. Front. Public Health 2020, 8, 535668. [Google Scholar] [CrossRef] [PubMed]
- Kollef, M.H. Inadequate Antimicrobial Treatment: An Important Determinant of Outcome for Hospitalized Patients. Clin. Infect. Dis. 2000, 31, S131–S138. [Google Scholar] [CrossRef] [Green Version]
- Jakobsen, T.H.; Xu, Y.; Bay, L.; Schønheyder, H.C.; Jakobsen, T.; Bjarnsholt, T.; Thomsen, T.R. Sampling challenges in diagnosis of chronic bacterial infections. J. Med. Microbiol. 2021, 70, 001302. [Google Scholar] [CrossRef]
- Catalano, A.; Iacopetta, D.; Ceramella, J.; Scumaci, D.; Giuzio, F.; Saturnino, C.; Aquaro, S.; Rosano, C.; Sinicropi, M.S. Multidrug Resistance (MDR): A Widespread Phenomenon in Pharmacological Therapies. Molecules 2022, 27, 616. [Google Scholar] [CrossRef] [PubMed]
- Waghray, D.; Zhang, Q. Inhibit or Evade Multidrug Resistance P-Glycoprotein in Cancer Treatment. J. Med. Chem. 2018, 61, 5108–5121. [Google Scholar] [CrossRef] [PubMed]
- Vasiliou, V.; Vasiliou, K.; Nebert, D.W. Human ATP-binding cassette (ABC) transporter family. Hum. Genom. 2009, 3, 281–290. [Google Scholar] [CrossRef]
- Magiorakos, A.-P.; Srinivasan, A.; Carey, R.B.; Carmeli, Y.; Falagas, M.E.; Giske, C.G.; Harbarth, S.; Hindler, J.F.; Kahlmeter, G.; Olsson-Liljequist, B.; et al. Multidrug-resistant, extensively drug-resistant and pandrug-resistant bacteria: An international expert proposal for interim standard definitions for acquired resistance. Clin. Microbiol. Infect. 2012, 18, 268. [Google Scholar] [CrossRef] [Green Version]
- Wan, M.M.; Chen, H.; Da Wang, Z.; Liu, Z.Y.; Yu, Y.Q.; Li, L.; Miao, Z.Y.; Wang, X.W.; Wang, Q.; Mao, C.; et al. Nitric Oxide-Driven Nanomotor for Deep Tissue Penetration and Multidrug Resistance Reversal in Cancer Therapy. Adv. Sci. 2021, 8, 2002525. [Google Scholar] [CrossRef]
- Wan, M.; Chen, H.; Wang, Q.; Niu, Q.; Xu, P.; Yu, Y.; Shen, J. Bio-inspired nitric-oxide-driven nanomotor. Nat. Commun. 2019, 10, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Schairer, D.O.; Chouake, J.S.; Nosanchuk, J.D.; Friedman, A.J. The potential of nitric oxide releasing therapies as antimicrobial agents. Virulence 2012, 3, 271–279. [Google Scholar] [CrossRef] [Green Version]
- Sonntag, L.; Simmchen, J.; Magdanz, V. Nano-and Micromotors Designed for Cancer Therapy. Molecules 2019, 24, 3410. [Google Scholar] [CrossRef] [Green Version]
- Navya, P.N.; Kaphle, A.; Srinivas, S.P.; Bhargava, S.K.; Rotello, V.M.; Daima, H.K. Current trends and challenges in cancer management and therapy using designer nanomaterials. Nano Converg. 2019, 6, 23. [Google Scholar] [CrossRef] [Green Version]
- Azzopardi, E.A.; Ferguson, E.L.; Thomas, D.W. The enhanced permeability retention effect: A new paradigm for drug targeting in infection. J. Antimicrob. Chemother. 2013, 68, 257–274. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Kostarelos, K.; Nelson, B.J.; Zhang, L. Trends in Micro-/Nanorobotics: Materials Development, Actuation, Localization, and System Integration for Biomedical Applications. Adv. Mater. 2021, 33, 2002047. [Google Scholar] [CrossRef]
- Bunea, A.-I.; Taboryski, R. Recent Advances in Microswimmers for Biomedical Applications. Micromachines 2020, 11, 1048. [Google Scholar] [CrossRef]
- Taylor, E.; Webster, T.J. Reducing infections through nanotechnology and nanoparticles. Int. J. Nanomed. 2011, 6, 1463–1473. [Google Scholar]
- Zhang, Z.; Wang, L.; Chan, T.K.; Chen, Z.; Ip, M.; Chan, P.K.; Zhang, L. Micro-/Nanorobots in Antimicrobial Applications: Recent Progress, Challenges, and Opportunities. Adv. Healthc. Mater. 2022, 11, 2101991. [Google Scholar] [CrossRef]
- Wang, J.; Gao, W. Nano/Microscale Motors: Biomedical Opportunities and Challenges. ACS Nano 2012, 6, 5745–5751. [Google Scholar] [CrossRef]
- Giri, G.; Maddahi, Y.; Zareinia, K. A Brief Review on Challenges in Design and Development of Nanorobots for Medical Applications. Appl. Sci. 2021, 11, 10385. [Google Scholar] [CrossRef]
- Mathesh, M.; Sun, J.; Wilson, D.A. Enzyme catalysis powered micro/nanomotors for biomedical applications. J. Mater. Chem. B 2020, 8, 7319–7334. [Google Scholar] [CrossRef]
- Naeem, S.; Naeem, F.; Mujtaba, J.; Shukla, A.K.; Mitra, S.; Huang, G.; Gulina, L.; Rudakovskaya, P.; Cui, J.; Tolstoy, V.; et al. Oxygen generation using catalytic nano/micromotors. Micromachines 2021, 12, 1251. [Google Scholar] [CrossRef]
- Guo, Z.; Liu, J.; Wang, D.-W.; Xu, J.; Liang, K. Biofriendly micro/nanomotors operating on biocatalysis: From natural to biological environments. Biophys. Rep. 2020, 6, 179–192. [Google Scholar] [CrossRef]
- Yang, Q.; Xu, L.; Zhong, W.; Yan, Q.; Gao, Y.; Hong, W.; She, Y.; Yang, G. Recent Advances in Motion Control of Micro/Nanomotors. Adv. Intell. Syst. 2020, 2, 2000049. [Google Scholar] [CrossRef]
- Hosseinidoust, Z.; Mostaghaci, B.; Yasa, O.; Park, B.W.; Singh, A.V.; Sitti, M. Bioengineered and biohybrid bacteria-based systems for drug delivery. Adv. Drug Deliv. Rev. 2016, 106, 27–44. [Google Scholar] [CrossRef]
- Ding, S.; O’banion, C.P.; Welfare, J.G.; Lawrence, D.S. Cell Chemical Biology Review Cellular Cyborgs: On the Precipice of a Drug Delivery Revolution. Cell Chem. Biol. 2018, 25, 648–658. [Google Scholar] [CrossRef] [Green Version]
- Timin, A.S.; Litvak, M.M.; Gorin, D.A.; Atochina-Vasserman, E.N.; Atochin, D.N.; Sukhorukov, G.B. Cell-Based Drug Delivery and Use of Nano-and Microcarriers for Cell Functionalization. Adv. Healthc. Mater. 2018, 7, 1700818. [Google Scholar] [CrossRef]
- Singh, A.V.; Ansari, M.H.D.; Mahajan, M.; Srivastava, S.; Kashyap, S.; Dwivedi, P.; Pandit, V.; Katha, U. Sperm Cell Driven Microrobots—Emerging Opportunities and Challenges for Biologically Inspired Robotic Design. Micromachines 2020, 11, 448. [Google Scholar] [CrossRef]
- Wang, J.; Soto, F.; Ma, P.; Ahmed, R.; Yang, H.; Chen, S.; Wang, J.; Liu, C.; Akin, D.; Fu, K.; et al. Acoustic Fabrication of Living Cardiomyocyte-based Hybrid Biorobots. ACS Nano 2022, 16, 10219–10230. [Google Scholar] [CrossRef]
- Furusawa, K.; Teramae, R.; Ohashi, H.; Shimizu, M. Development of Living “Bio-Robots” for Autonomous Actuations. J. Robot Mechatron. 2022, 34, 279–284. [Google Scholar] [CrossRef]
- Ramanujam, E.; Rasikannan, L.; Anandhalakshmi, P.A.; Kamal, N.A. Xenobots. Int. J. Sociotechnol. Knowl. Dev. 2022, 14, 1–11. [Google Scholar] [CrossRef]
- Wang, Z.; Tu, Y.; Chen, Y.; Peng, F. Emerging Micro/Nanomotor-Based Platforms for Biomedical Therapy. Adv. Intell. Syst. 2020, 2, 1900081. [Google Scholar] [CrossRef]
- Xu, T.; Gao, W.; Xu, L.-P.; Zhang, X.; Wang, S. Fuel-Free Synthetic Micro-/Nanomachines. Adv. Mater. 2017, 29, 1603250. [Google Scholar] [CrossRef]
- Guo, J.; Gallegos, J.J.; Tom, A.R.; Fan, D. Electric-Field-Guided Precision Manipulation of Catalytic Nanomotors for Cargo Delivery and Powering Nanoelectromechanical Devices. ACS Nano 2018, 12, 1179–1187. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Mou, F.; Gong, H.; Luo, M.; Guan, J. Light-driven micro/nanomotors: From fundamentals to applications. Chem. Soc. Rev. 2017, 46, 6905–6926. [Google Scholar] [CrossRef]
- Villa, K.; Pumera, M. Fuel-free light-driven micro/nanomachines: Artificial active matter mimicking nature. Chem. Soc. Rev. 2019, 48, 4966–4978. [Google Scholar] [CrossRef]
- Safdar, M.; Simmchen, J.; Jänis, J. Light-driven micro- and nanomotors for environmental remediation. Environ. Sci. Nano 2017, 4, 1602–1616. [Google Scholar] [CrossRef]
- Wang, Y.; Tu, Y.; Peng, F. The Energy Conversion behind Micro-and Nanomotors. Micromachines 2021, 12, 222. [Google Scholar] [CrossRef]
- Zhou, H.; Mayorga-Martinez, C.C.; Pané, S.; Zhang, L.; Pumera, M. Magnetically Driven Micro and Nanorobots. Chem Rev. 2021, 121, 4999–5041. [Google Scholar] [CrossRef]
- Aghakhani, A.; Cetin, H.; Erkoc, P.; Tombak, G.I.; Sitti, M. Flexural wave-based soft attractor walls for trapping microparticles and cells. Lab Chip 2021, 21, 582–596. [Google Scholar] [CrossRef]
- Wrede, P.; Degtyaruk, O.; Kalva, S.K.; Deán-Ben, X.L.; Bozuyuk, U.; Aghakhani, A.; Akolpoglu, B.; Sitti, M.; Razansky, D. Real-time 3D optoacoustic tracking of cell-sized magnetic microrobots circulating in the mouse brain vasculature. Sci. Adv. 2022, 8, 9132. [Google Scholar] [CrossRef]
- Wan, M.; Li, T.; Chen, H.; Mao, C.; Shen, J. Biosafety, Functionalities, and Applications of Biomedical Micro/nanomotors. Angew. Chem. Int. Ed. 2021, 60, 13158–13176. [Google Scholar] [CrossRef]
- Choi, H.; Yi, J.; Cho, S.H.; Hahn, S.K. Multifunctional micro/nanomotors as an emerging platform for smart healthcare applications. Biomaterials 2021, 279, 121201. [Google Scholar] [CrossRef]
- Wang, S.; Liu, K.; Wang, F.; Peng, F.; Tu, Y. The Application of Micro- and Nanomotors in Classified Drug Delivery. Chem. Asian J. 2019, 14, 2336–2347. [Google Scholar] [CrossRef]
- Alós, J.I. Antibiotic resistance: A global crisis. Enferm. Infecc. Microbiol. Clin. 2015, 33, 692–699. [Google Scholar] [CrossRef]
- Paterson, I.K.; Hoyle, A.; Ochoa, G.; Baker-Austin, C.; Taylor, N.G.H. Optimising Antibiotic Usage to Treat Bacterial Infections. Sci. Rep. 2016, 6, 37853. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Gao, Y.; Chen, Y.; Liu, L.; Mo, A.; Peng, Q. Nanomaterials-based photothermal therapy and its potentials in antibacterial treatment. J. Control. Release 2020, 328, 251–262. [Google Scholar] [CrossRef]
- Soler, L.; Magdanz, V.; Fomin, V.M.; Sanchez, S.; Schmidt, O.G. Self-propelled micromotors for cleaning polluted water. ACS Nano 2013, 7, 9611–9620. [Google Scholar] [CrossRef]
- Paxton, W.F.; Kistler, K.C.; Olmeda, C.C.; Sen, A.; St Angelo, S.K.; Cao, Y.; Crespi, V.H. Catalytic Nanomotors: Autonomous Movement of Striped Nanorods. J. Am. Chem. Soc. 2004, 126, 13424–13431. [Google Scholar] [CrossRef] [PubMed]
- Yuan, K.; Jurado-Sánchez, B.; Escarpa, A. Dual-Propelled Lanbiotic Based Janus Micromotors for Selective Inactivation of Bacterial Biofilms. Angew. Chem. Int. Ed. 2021, 60, 4915–4924. [Google Scholar] [CrossRef] [PubMed]
- Kiristi, M.; Singh, V.V.; de Ávila, B.E.-F.; Uygun, M.; Soto, F.; Uygun, D.A.; Wang, J. Lysozyme-Based Antibacterial Nanomotors. ACS Nano 2015, 9, 9252–9259. [Google Scholar] [CrossRef] [PubMed]
- Xu, D.; Zhou, C.; Zhan, C.; Wang, Y.; You, Y.; Pan, X.; Jiao, J.; Zhang, R.; Dong, Z.; Wang, W.; et al. Enzymatic Micromotors as a Mobile Photosensitizer Platform for Highly Efficient On-Chip Targeted Antibacteria Photodynamic Therapy. Adv. Funct. Mater. 2019, 29, 1807727. [Google Scholar] [CrossRef]
- Andeventer, P.E.; Weigel, K.M.; Salazar, J.; Erwin, B.; Irvine, B.; Doebler, R.; Nadim, A.; Cangelosi, G.A.; Niemz, A. Mechanical disruption of lysis-resistant bacterial cells by use of a miniature, low-power, disposable device. J. Clin. Microbiol. 2011, 49, 2533–2539. [Google Scholar] [CrossRef] [Green Version]
- Wang, J. Nanomachines: Fundamentals and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2013; ISBN 978-3-527-65147-4. [Google Scholar]
- Flemming, H.C.; Wingender, J.; Szewzyk, U.; Steinberg, P.; Rice, S.A.; Kjelleberg, S. Biofilms: An emergent form of bacterial life. Nat. Rev. Microbiol. 2016, 14, 563–575. [Google Scholar] [CrossRef]
- Peterson, B.; He, Y.; Ren, Y.; Zerdoum, A.; Libera, M.R.; Sharma, P.K.; Van Winkelhoff, A.-J.; Neut, D.; Stoodley, P.; Van Der Mei, H.C.; et al. Viscoelasticity of biofilms and their recalcitrance to mechanical and chemical challenges. FEMS Microbiol. Rev. 2015, 39, 234–245. [Google Scholar] [CrossRef] [Green Version]
- Howlin, R.P.; Brayford, M.J.; Webb, J.S.; Cooper, J.J.; Aiken, S.S.; Stoodley, P. Antibiotic-loaded synthetic calcium sulfate beads for prevention of bacterial colonization and biofilm formation in periprosthetic infections. Antimicrob. Agents Chemother. 2015, 59, 111–120. [Google Scholar] [CrossRef] [Green Version]
- Castaneda, P.; McLaren, A.; Tavaziva, G.; Overstreet, D. Biofilm Antimicrobial Susceptibility Increases With Antimicrobial Exposure Time. Clin. Orthop. Relat. Res. 2016, 474, 1659–1664. [Google Scholar] [CrossRef]
- Li, J.; de Ávila, B.E.-F.; Gao, W.; Zhang, L.; Wang, J. Micro/Nanorobots for Biomedicine: Delivery, Surgery, Sensing, and Detoxification. Sci. Robot. 2017, 2, 1–9. [Google Scholar] [CrossRef]
- Villa, K.; Viktorova, J.; Plutnar, J.; Ruml, T.; Hoang, L.; Pumera, M. Chemical Microrobots as Self-Propelled Microbrushes against Dental Biofilm. Cell Rep. Phys. Sci. 2020, 1, 100181. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, L.; Yuan, K.; Ji, F.; Gao, J.; Zhang, Z.; Du, X.; Tian, Y.; Wang, Q.; Zhang, L. Magnetic Microswarm Composed of Porous Nanocatalysts for Targeted Elimination of Biofilm Occlusion. ACS Nano 2021, 15, 5056–5067. [Google Scholar] [CrossRef] [PubMed]
- Villa, K.; Sopha, H.; Zelenka, J.; Motola, M.; Dekanovsky, L.; Beketova, D.C.; Macak, J.M.; Ruml, T.; Pumera, M. Enzyme—Photocatalyst Tandem Microrobot Powered by Urea for Escherichia coli Biofilm Eradication. Small 2022, 2106612. Early view. [Google Scholar] [CrossRef] [PubMed]
- Cui, T.; Wu, S.; Sun, Y.; Ren, J.; Qu, X. Self-Propelled Active Photothermal Nanoswimmer for Deep-Layered Elimination of Biofilm in Vivo. Nano Lett. 2020, 20, 7350–7358. [Google Scholar] [CrossRef]
- Hwang, G.; Paula, A.J.; Hunter, E.E.; Liu, Y.; Babeer, A.; Karabucak, B.; Stebe, K.; Kumar, V.; Steager, E.; Koo, H. Catalytic antimicrobial robots for biofilm eradication. Sci. Robot. 2019, 4, eaaw2388. [Google Scholar] [CrossRef]
- Ussia, M.; Urso, M.; Dolezelikova, K.; Michalkova, H.; Adam, V.; Pumera, M. Active Light-Powered Antibiofilm ZnO Micromotors with Chemically Programmable Properties. Adv. Funct. Mater. 2021, 31, 2101178. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Y.; Shi, Y.; Song, H.; Yu, C. Antibiotic-Free Antibacterial Strategies Enabled by Nanomaterials: Progress and Perspectives. Adv. Mater. 2020, 32, 1904106. [Google Scholar] [CrossRef]
- Tezel, G.; Timur, S.S.; Kuralay, F.; Gürsoy, R.N.; Ulubayram, K.; Öner, L.; Eroğlu, H. Current status of micro/nanomotors in drug delivery. J. Drug Target. 2020, 29, 29–45. [Google Scholar] [CrossRef]
- Allocati, N.; Masulli, M.; Alexeyev, M.F.; Di Ilio, C. Escherichia coli in Europe: An Overview. Int. J. Environ. Res. Public Health 2013, 10, 6235. [Google Scholar] [CrossRef]
- Mellata, M. Human and Avian Extraintestinal Pathogenic Escherichia coli: Infections, Zoonotic Risks, and Antibiotic Resistance Trends. Foodborne Pathog. Dis. 2013, 10, 916. [Google Scholar] [CrossRef] [Green Version]
- Delezuk, J.A.M.; Ramírez-Herrera, D.E.; de Ávila, B.E.-F.; Wang, J. Chitosan-based water-propelled micromotors with strong antibacterial activity. Nanoscale 2017, 9, 2195–2200. [Google Scholar] [CrossRef] [PubMed]
- Vilela, D.; Stanton, M.M.; Parmar, J.; Sánchez, S. Microbots Decorated with Silver Nanoparticles Kill Bacteria in Aqueous Media. ACS Appl. Mater. Interfaces 2017, 9, 22093–22100. [Google Scholar] [CrossRef] [PubMed]
- Campuzano, S.; Orozco, J.; Kagan, D.; Guix, M.; Gao, W.; Sattayasamitsathit, S.; Wang, J. Bacterial Isolation by Lectin-Modified Microengines. Nano Lett. 2012, 12, 396. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Gradilla, V.; Orozco, J.; Sattayasamitsathit, S.; Soto, F.; Kuralay, F.; Pourazary, A.; Katzenberg, A.; Gao, W.; Shen, Y.; Wang, J. Functionalized ultrasound-propelled magnetically guided nanomotors: Toward practical biomedical applications. ACS Nano 2013, 7, 9232–9240. [Google Scholar] [CrossRef] [PubMed]
- Vilela, D.; Blanco-Cabra, N.; Eguskiza, A.; Hortelao, A.C.; Torrents, E.; Sanchez, S. Drug-Free Enzyme-Based Bactericidal Nanomotors against Pathogenic Bacteria. ACS Appl. Mater. Interfaces 2021, 13, 14964–14973. [Google Scholar] [CrossRef] [PubMed]
- Kobayashi, S.D.; Malachowa, N.; Deleo, F.R. Pathogenesis of Staphylococcus aureus Abscesses. Am. J. Pathol. 2015, 185, 1518–1527. [Google Scholar] [CrossRef] [Green Version]
- Lister, J.L.; Horswill, A.R. Staphylococcus aureus biofilms: Recent developments in biofilm dispersal. Front. Cell Infect. Microbiol. 2014, 4, 178. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.Y.; Chen, C.F.; Yi, Y.; Chen, L.J.; Wu, L.F.; Song, T. Construction of a microrobot system using magnetotactic bacteria for the separation of Staphylococcus aureus. Biomed. Microdevices 2014, 16, 761–770. [Google Scholar] [CrossRef]
- Blakemore, R.P. Magnetotactic Bacteria. Science 1975, 190, 377–379. [Google Scholar] [CrossRef]
- Chen, C.; Chen, L.; Wang, P.; Wu, L.F.; Song, T. Magnetically-induced elimination of Staphylococcus aureus by magnetotactic bacteria under a swing magnetic field. Nanomedicine 2017, 13, 363–370. [Google Scholar] [CrossRef]
- Chen, C.; Chen, L.; Yi, Y.; Chen, C.; Wu, L.F.; Song, T. Killing of Staphylococcus aureus via Magnetic Hyperthermia Mediated by Magnetotactic Bacteria. Appl. Environ. Microbiol. 2016, 82, 2219–2226. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Angsantikul, P.; Liu, W.; de Ávila, B.E.-F.; Chang, X.; Sandraz, E.; Wang, J. Biomimetic Platelet-Camouflaged Nanorobots for Binding and Isolation of Biological Threats. Adv. Mater. 2018, 30, 1704800. [Google Scholar] [CrossRef] [PubMed]
- Orozco, J.; Pan, G.; Sattayasamitsathit, S.; Galarnyk, M.; Wang, J. Micromotors to capture and destroy anthrax simulant spores. Analyst 2015, 140, 1421–1427. [Google Scholar] [CrossRef] [PubMed]
- Vading, M.; Nauclér, P.; Kalin, M.; Giske, C.G. Invasive infection caused by Klebsiella pneumoniae is a disease affecting patients with high comorbidity and associated with high long-term mortality. PLoS ONE 2018, 13, e0195258. [Google Scholar] [CrossRef] [PubMed]
- Podschun, R.; Ullmann, U. Klebsiella spp. as nosocomial pathogens: Epidemiology, taxonomy, typing methods, and pathogenicity factors. Clin. Microbiol. Rev. 1998, 11, 589–603. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, R.L.; Da Silva, B.C.; Rezende, G.S.; Nakamura-Silva, R.; Pitondo-Silva, A.; Campanini, E.B.; Pranchevicius, M.C.D.S. High prevalence of multidrug-resistant Klebsiella pneumoniae harboring several virulence and β-lactamase encoding genes in a brazilian intensive care unit. Front. Microbiol. 2019, 9, 3198. [Google Scholar] [CrossRef] [Green Version]
- Nirwati, H.; Sinanjung, K.; Fahrunissa, F.; Wijaya, F.; Napitupulu, S.; Hati, V.P.; Hakim, M.S.; Meliala, A.; Aman, A.T.; Nuryastuti, T. Biofilm formation and antibiotic resistance of Klebsiella pneumoniae isolated from clinical samples in a tertiary care hospital, Klaten, Indonesia. BMC Proc. 2019, 13, 20. [Google Scholar] [CrossRef]
- Xie, L.; Pang, X.; Yan, X.; Dai, Q.; Lin, H.; Ye, J.; Cheng, Y.; Zhao, Q.; Ma, X.; Zhang, X.; et al. Photoacoustic Imaging-Trackable Magnetic Microswimmers for Pathogenic Bacterial Infection Treatment. ACS Nano 2020, 14, 2880–2893. [Google Scholar] [CrossRef]
- Krakowka, S.; Eaton, K.A.; Leunk, R.D. Antimicrobial Therapies for Helicobacter pylori Infection in Gnotobiotic Piglets. Antimicrob. Agents Chemother. 1998, 42, 1549. [Google Scholar] [CrossRef] [Green Version]
- de Ávila BE, F.; Angsantikul, P.; Li, J.; Angel Lopez-Ramirez, M.; Ramírez-Herrera, D.E.; Thamphiwatana, S.; Wang, J. Micromotor-enabled active drug delivery for in vivo treatment of stomach infection. Nat. Commun. 2017, 8, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Pang, Z.; Raudonis, R.; Glick, B.R.; Lin, T.J.; Cheng, Z. Antibiotic resistance in Pseudomonas aeruginosa: Mechanisms and alternative therapeutic strategies. Biotechnol. Adv. 2019, 37, 177–192. [Google Scholar] [CrossRef] [PubMed]
- Paryab, A.; Madaah Hosseini, H.R.; Abedini, F.; Dabbagh, A. Synthesis of magnesium-based Janus micromotors capable of magnetic navigation and antibiotic drug incorporation. New J. Chem. 2020, 44, 6947–6957. [Google Scholar] [CrossRef]
- Felfoul, O.; Mohammadi, M.; Taherkhani, S.; De Lanauze, D.; Xu, Y.Z.; Loghin, D.; Essa, S.; Jancik, S.; Houle, D.; LaFleur, M.; et al. Magneto-aerotactic bacteria deliver drug-containing nanoliposomes to tumour hypoxic regions. Nat. Nanotechnol. 2016, 11, 941–947. [Google Scholar] [CrossRef] [PubMed]
- Lefèvre, C.T.; Bennet, M.; Landau, L.; Vach, P.; Pignol, D.; Bazylinski, D.A.; Frankel, R.B.; Klumpp, S.; Faivre, D. Diversity of Magneto-Aerotactic Behaviors and Oxygen Sensing Mechanisms in Cultured Magnetotactic Bacteria. Biophys. J. 2014, 107, 527. [Google Scholar] [CrossRef] [Green Version]
- Bennet, M.; McCarthy, A.; Fix, D.; Edwards, M.R.; Repp, F.; Vach, P.; Dunlop, J.; Sitti, M.; Buller, G.; Klumpp, S.; et al. Influence of Magnetic Fields on Magneto-Aerotaxis. PLoS ONE 2014, 9, e101150. [Google Scholar]
- Stanton, M.M.; Park, B.W.; Vilela, D.; Bente, K.; Faivre, D.; Sitti, M.; Sánchez, S. Magnetotactic Bacteria Powered Biohybrids Target E. coli Biofilms. ACS Nano 2017, 11, 9968–9978. [Google Scholar] [CrossRef]
- Yasa, O.; Erkoc, P.; Alapan, Y.; Sitti, M. Microalga-Powered Microswimmers toward Active Cargo Delivery. Adv. Mater. 2018, 30, 1804130. [Google Scholar] [CrossRef]
- Zhang, F.; Li, Z.; Yin, L.; Zhang, Q.; Askarinam, N.; Mundaca-Uribe, R.; Wang, J. ACE2 Receptor-Modified Algae-Based Microrobot for Removal of SARS-CoV-2 in Wastewater. J. Am. Chem. Soc. 2021, 143, 12194–12201. [Google Scholar] [CrossRef]
- Shchelik, I.S.; Sieber, S.; Gademann, K. Green Algae as a Drug Delivery System for the Controlled Release of Antibiotics. Chem A Eur. J. 2020, 26, 16644–16648. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Y.; Han, Y.; Gong, X. Micro/Nanorobots for Medical Diagnosis and Disease Treatment. Micromachines 2022, 13, 648. [Google Scholar] [CrossRef]
- Choi, J.; Hwang, J.; Kim, J.-Y.; Choi, H. Recent Progress in Magnetically Actuated Microrobots for Targeted Delivery of Therapeutic Agents. Adv. Healthc. Mater. 2021, 10, 2001596. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Li, C.; Dong, L.; Zhao, J. A Review of Microrobot’s System: Towards System Integration for Autonomous Actuation In Vivo. Micromachines 2021, 12, 1249. [Google Scholar] [CrossRef] [PubMed]
- Hu, M.; Ge, X.; Chen, X.; Mao, W.; Qian, X.; Yuan, W.E. Micro/Nanorobot: A Promising Targeted Drug Delivery System. Pharmaceutics 2020, 12, 665. [Google Scholar] [CrossRef]
- Dong, X.; Sitti, M. Controlling two-dimensional collective formation and cooperative behavior of magnetic microrobot swarms. Int. J. Robot. Res. 2020, 39, 5, 617–638. [Google Scholar] [CrossRef]
- Halder, A.; Sun, Y. Biocompatible propulsion for biomedical micro/nano robotics. Biosens. Bioelectron. 2019, 139, 111334. [Google Scholar] [CrossRef]
- Luo, M.; Feng, Y.; Wang, T.; Guan, J. Micro-/Nanorobots at Work in Active Drug Delivery. Adv. Funct. Mater. 2018, 28, 1706100. [Google Scholar] [CrossRef]
- Erkoc, P.; Yasa, I.C.; Ceylan, H.; Yasa, O.; Alapan, Y.; Sitti, M. Mobile Microrobots for Active Therapeutic Delivery. Adv. Ther. 2019, 2, 1800064. [Google Scholar] [CrossRef] [Green Version]
- Ji, X.; Yang, H.; Liu, W.; Ma, Y.; Wu, J.; Zong, X.; Yuan, P.; Chen, X.; Yang, C.; Li, X.; et al. Multifunctional Parachute-like Nanomotors for Enhanced Skin Penetration and Synergistic Antifungal Therapy. ACS Nano 2021, 15, 14218–14228. [Google Scholar] [CrossRef]
- Naha, P.C.; Liu, Y.; Hwang, G.; Huang, Y.; Gubara, S.; Jonnakuti, V.; Simon-Soro, A.; Kim, D.; Gao, L.; Koo, H.; et al. Dextran-Coated Iron Oxide Nanoparticles as Biomimetic Catalysts for Localized and pH-Activated Biofilm Disruption. ACS Nano 2019, 13, 4960–4971. [Google Scholar] [CrossRef]
- Singh, A.V.; Ansari, M.H.D.; Laux, P.; Luch, A. Micro-nanorobots: Important considerations when developing novel drug delivery platforms. Expert Opin. Drug Deliv. 2019, 16, 1259–1275. [Google Scholar] [CrossRef]
- Kumar Daima, H.; Xia, Z.; Ying, Y.; Yang, X.; Ye, W.; Qi, Y. Overcoming Multidrug Resistance in Bacteria Through Antibiotics Delivery in Surface-Engineered Nano-Cargos: Recent Developments for Future Nano-Antibiotics. Futur. Nano-Antibiot. Front. Bioeng. Biotechnol. 2021, 9, 696514. [Google Scholar]
- Citorik, R.J.; Mimee, M.; Lu, T.K. Sequence-specific antimicrobials using efficiently delivered RNA-guided nucleases. Nat. Biotechnol. 2014, 32, 1141–1145. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chakravarty, M.; Vora, A. Nanotechnology-based antiviral therapeutics. Drug Deliv. Transl. Res. 2020, 11, 748–787. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
(A) Driving mechanisms of micro-/nanorobots. (B,C) Percentile distribution of micro-/nanorobot articles published in the last 5 years, regarding the driving mechanisms. Percentages are given as a part of the whole appearance graph in (B), and comparisons in each year are given as a bar graph in (C). The data are received from Web of Science and Scopus databases on 18 July 2022 with antimicrobial, ultrasound, electric field, magnetic field, and driving mechanisms keywords.
Figure 1.
(A) Driving mechanisms of micro-/nanorobots. (B,C) Percentile distribution of micro-/nanorobot articles published in the last 5 years, regarding the driving mechanisms. Percentages are given as a part of the whole appearance graph in (B), and comparisons in each year are given as a bar graph in (C). The data are received from Web of Science and Scopus databases on 18 July 2022 with antimicrobial, ultrasound, electric field, magnetic field, and driving mechanisms keywords.
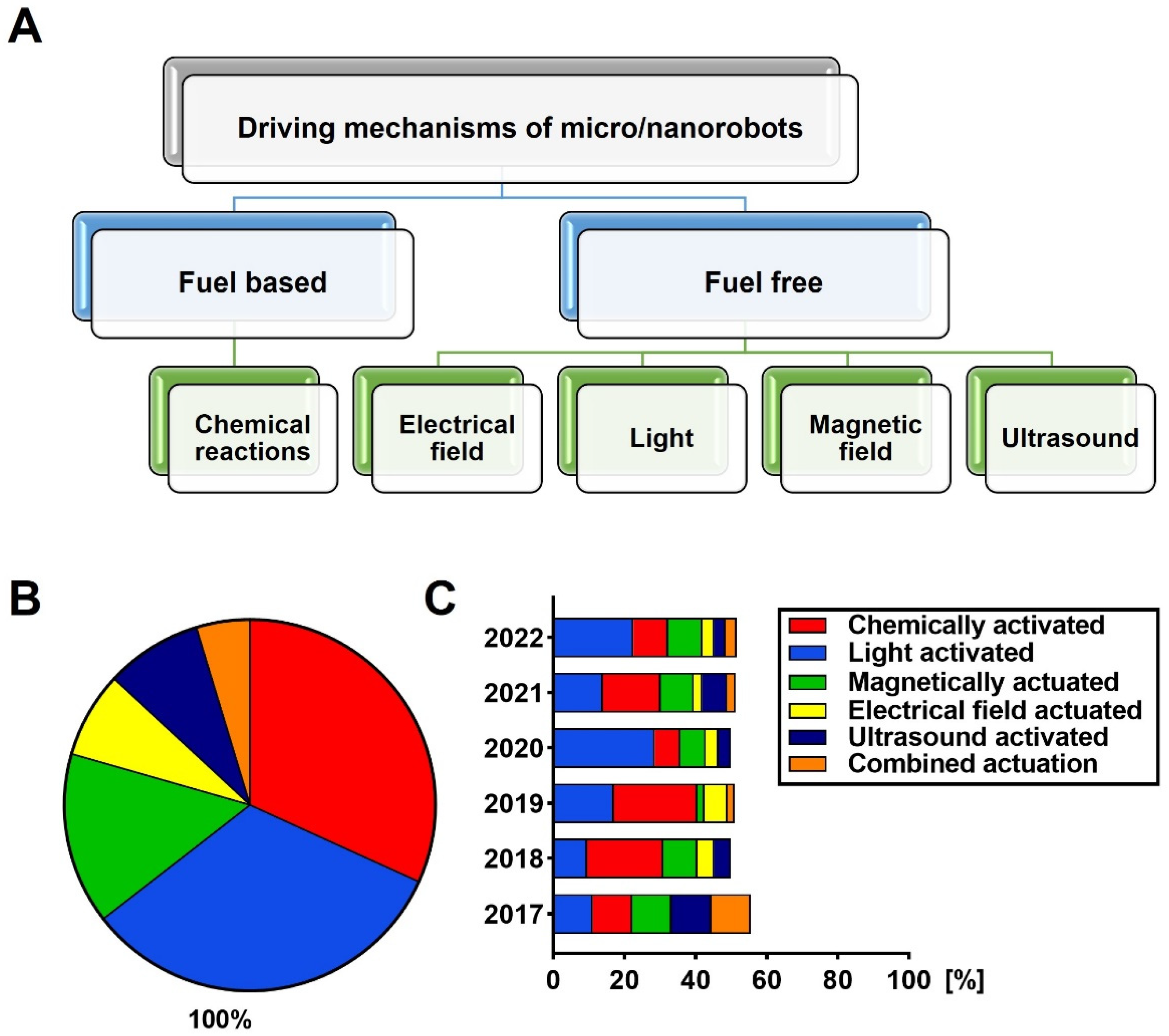
Figure 2.
The percentile distribution of antimicrobial micro-/nanorobot articles regarding the driving mechanisms in comparison with all published articles in the last 5 years is given as a bar graph. The data are received from Web of Science and Scopus databases on 18 July 2022.
Figure 2.
The percentile distribution of antimicrobial micro-/nanorobot articles regarding the driving mechanisms in comparison with all published articles in the last 5 years is given as a bar graph. The data are received from Web of Science and Scopus databases on 18 July 2022.

Figure 3.
Results of biofilm degradation by TiO2/Pt microrobots. (A) Dental biofilm viability in the presence of various H2O2 concentrations (n = 8; error bars reflect standard error of the mean). (B) Dental biofilm viability % against concentrations of microrobots (n = 4; error bars represent the standard error of the mean). (C) Fluorescence intensity of 2−hydroxytherepthalic acid. (D) Schematic illustration of dental biofilm disruption by bubble-propelled microrobots over time. Reprinted from Ref. [63] from an open-access journal of Elsevier Publishing.
Figure 3.
Results of biofilm degradation by TiO2/Pt microrobots. (A) Dental biofilm viability in the presence of various H2O2 concentrations (n = 8; error bars reflect standard error of the mean). (B) Dental biofilm viability % against concentrations of microrobots (n = 4; error bars represent the standard error of the mean). (C) Fluorescence intensity of 2−hydroxytherepthalic acid. (D) Schematic illustration of dental biofilm disruption by bubble-propelled microrobots over time. Reprinted from Ref. [63] from an open-access journal of Elsevier Publishing.
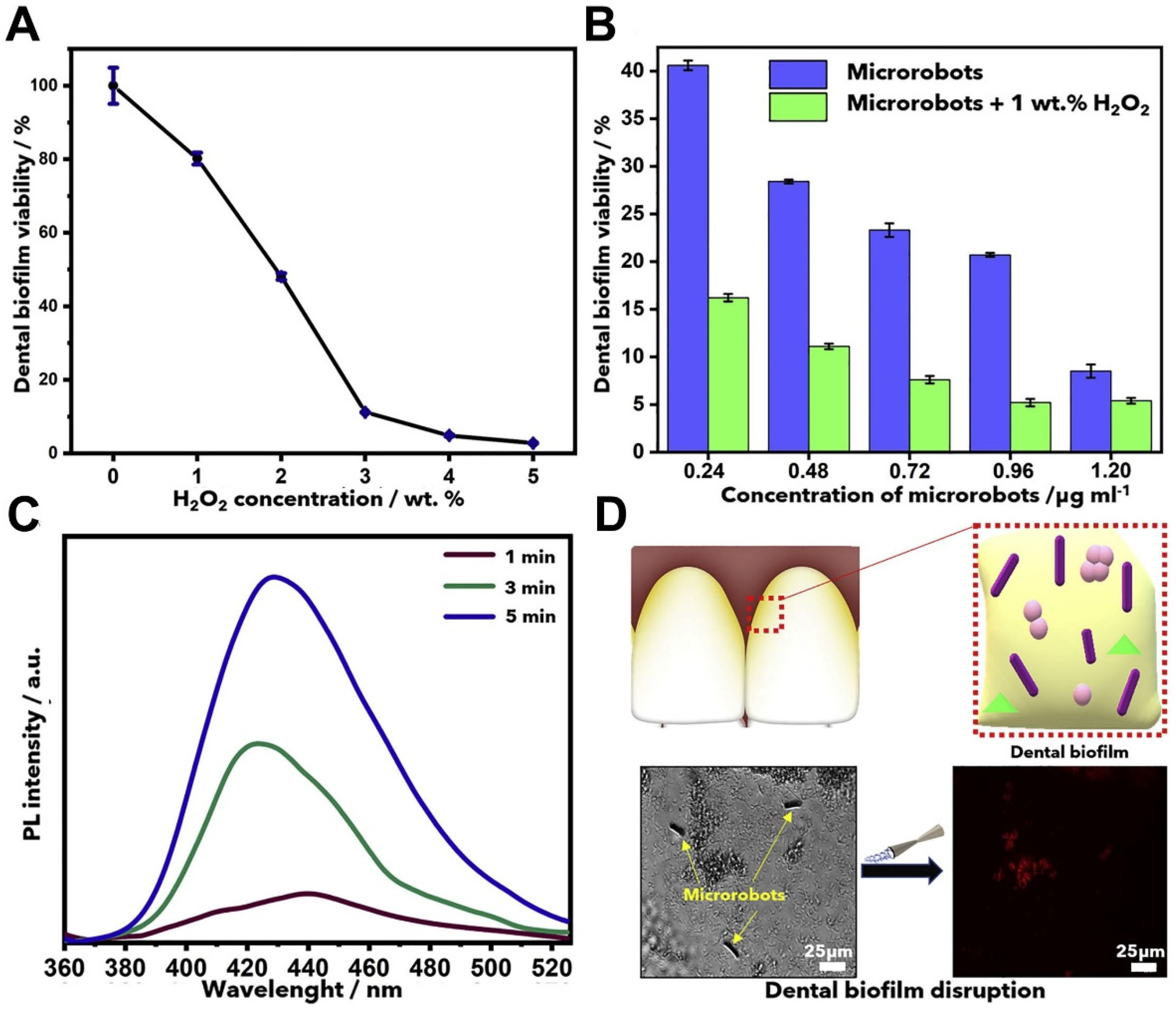
Figure 4.
Representation of hybrid photocatalytic TiO2/CdS microrobots E. coli biofilm removal. Reprinted from Ref. [65] from an open-access journal of Wiley Publishing.
Figure 4.
Representation of hybrid photocatalytic TiO2/CdS microrobots E. coli biofilm removal. Reprinted from Ref. [65] from an open-access journal of Wiley Publishing.
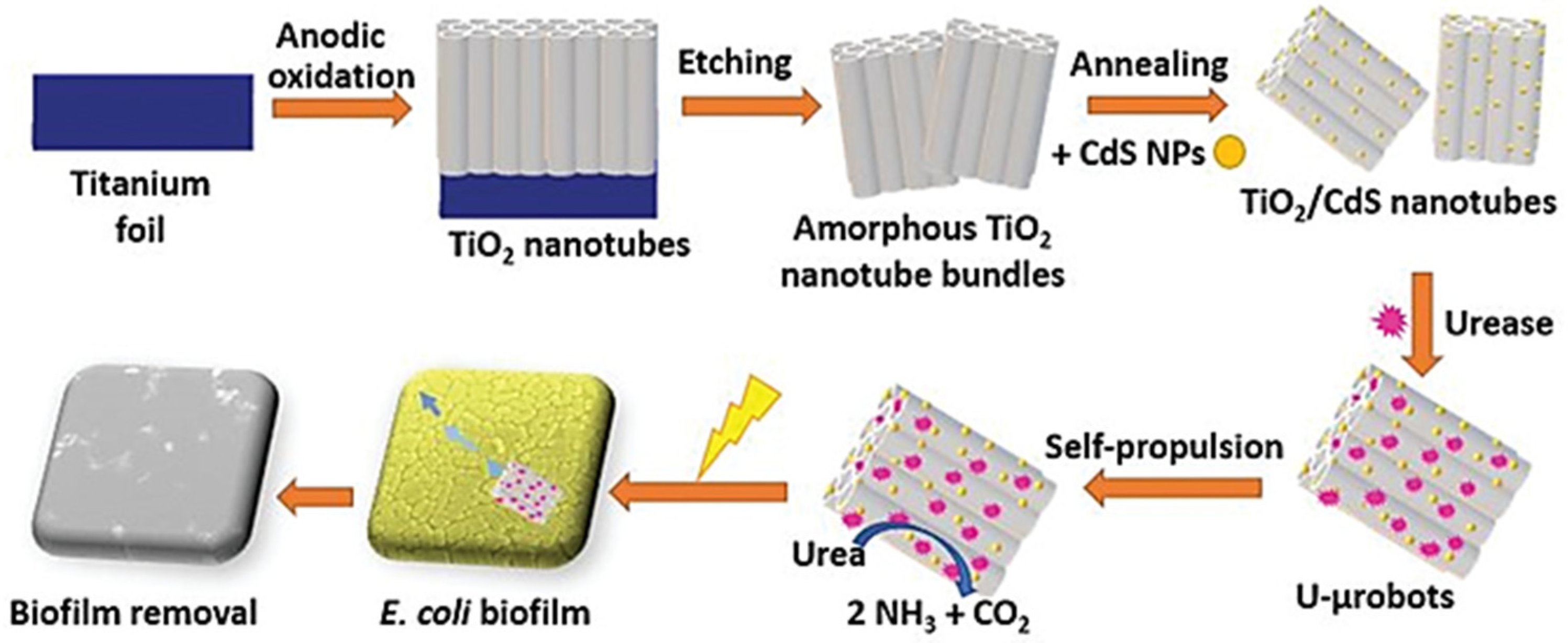

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Studies of micro-/nanorobots against different bacteria.
| Micro-/Nanorobot Types | Targeted Bacteria | Outcomes |
|---|---|---|
| Pt/TiO2 | Dental biofilm | The effect of TiO2 microrobots of up to 1% H2O2 in the in vitro biofilm model system was investigated. In addition, its toxic effect on HEK293T and HaCaT cell lines was investigated [63]. |
| p-Fe3O4 MPs | E. coli and B. cereus biofilms | Firstly, the effect of p-Fe3O4 MPs microrobots on biofilm in PBS and LCM solutions has been demonstrated. In addition, its toxic effect on 3T3 cells was investigated [64]. |
| Enzyme-bound Fe3O4 NPs | Streptococcus mutans biofilms | It has been reported that Fe3O4 nanorobots formulated with mutase dextranase enzymes have a high biofilm effect in vitro [67]. |
| ZnO: Ag | S. aureus and P. aeruginosa biofilms | More than 80% killing was observed in the in vitro biofilm environment of ZnO: Ag nanorobots, together with the photocatalytic effect [68]. |
| NIR-Mesoporous Silica Half-Shell | S. aureus biofilms | The toxic effect of NIR-guided HSMV on 3T3 fibroblasts was investigated. In addition, its effect on the biofilm in mice was studied and high efficiency was obtained [66]. |
| Mg/Au/PLGA/Alg/Chi | E. coli | The Mg/Au/PLGA/Alg/Chi nanorobot has been designed to kill E.coli bacteria by 90% in seawater and drinking water [73]. |
| Au/Ni/PANI/Pt microtubular | E. coli | It was observed that E.coli bacteria were cleared in vitro with lectin-modified Au/Ni/PANI/Pt microtubular [75]. |
| Au/Ni/Au Nanowire | E. coli | E.coli was removed with lectin-modified Au/Ni/Au nanowire in vitro [76]. |
| MRS-1-MSM | E. coli | MRS-1 bacteria and MSM were combined, and efficient results were obtained on E. coli in vitro by loading ciprofloxacin antibiotics [98]. |
| Ag/Mg Janus | E. coli | The effect of Ag/Mg Janus microrobots on E. coli bacteria was investigated on water and PBS and high efficiency was obtained [74]. |
| U-MNSP | E. coli | Mesoporous silica nanoparticles urease, lysozyme, and the combination of urease and lysozyme were modified in 3 different ways and their effect on E. coli was investigated. Up to 80% kill has been reported with the urease-functionalized MNSP [77]. |
| (COOH-PPy): PEDOT/Ni/Pt | Bacillus globigii | PEDOT/Ni/Pt microrobots were modified with an anti-B antibody that has been shown to kill B. globigii spores in high-efficiency in vitro environments such as lake water [85]. |
| PDA-MSP | Klebsiella pneumoniae | The photothermal effect of PDA-MSP magnetic microrobots resulted in high activity on Klebsiella pneumoniae bacteria in vitro [90]. |
| Mg/TiO2 Janus | Helicobacter pylori | When the efficiency of CLR antibiotic-loaded Mg-TiO2 Janus microrobots on Helicobacter pylori-infected mice was examined, an efficiency close to 99% was obtained [92]. |
| Mg/Fe3O4 Janus | Pseudomonas aeruginosa | When the effects of Janus nanorobots, consisting of magnesium and superparamagnetic iron oxide, with and without antibiotics were examined, efficiencies of 80% and 100% were obtained in vitro, respectively [94]. |
| sMF attached to MO-1 cells | S. aureus | Magnetotactic bacteria designed with a low frequency and low heat generating oscillating magnetic field were coated with rabbit anti-MO-1 polyclonal antibody and its effect on S. aureus bacteria in vitro was investigated [82]. |
| Magnetotactic bacteria MO-1 | S. aureus | Magnetotactic bacterial nanorobots rabbit anti-MO-1 cell polyclonal antibodies have been modified and its effect on S.auerus has been observed in vitro [80]. |
| Alternating Magnetic Field (AMF)-MO-1 | S. aureus | Effective results have been reported in mice at 43.0 °C by hyperthermia by modifying magnetotactic bacteria with rabbit anti-MO-1 polyclonal antibodies [83]. |
| Platelet-Membrane Cloaked Nanorobots | S. aureus | The effect of platelet-membrane cloaked nanorobots on S. aureus was investigated in vitro [84]. |
| ACE2-Algae | SARS-CoV-2 | SARS-CoV-2 was removed from the water by using C. reinhardtii algae [100]. |
| Antibiotic-loaded algae | Bacillus subtilis | High efficiency as a result of photo light triggering of vancomycin-loaded algae B. subtilis bacteria was inhibited [101]. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ozaydin, M.S.; Doganturk, L.; Ulucan-Karnak, F.; Akdogan, O.; Erkoc, P. Contemporary Tools for the Cure against Pernicious Microorganisms: Micro-/Nanorobots. Prosthesis 2022, 4, 424-443. https://doi.org/10.3390/prosthesis4030034
AMA Style
Ozaydin MS, Doganturk L, Ulucan-Karnak F, Akdogan O, Erkoc P. Contemporary Tools for the Cure against Pernicious Microorganisms: Micro-/Nanorobots. Prosthesis. 2022; 4(3):424-443. https://doi.org/10.3390/prosthesis4030034
Chicago/Turabian StyleOzaydin, Mustafa Sami, Lorin Doganturk, Fulden Ulucan-Karnak, Ozan Akdogan, and Pelin Erkoc. 2022. "Contemporary Tools for the Cure against Pernicious Microorganisms: Micro-/Nanorobots" Prosthesis 4, no. 3: 424-443. https://doi.org/10.3390/prosthesis4030034