
Resilient Predictive Control Coupled with a Worst-Case Scenario Approach for a Distributed-Generation-Rich Power Distribution Grid



Abstract
:1. Introduction
2. Case Study
2.1. Low-Voltage Power Distribution Grid
2.2. Flexible Assets
2.2.1. Biogas Plant
2.2.2. Water Tower
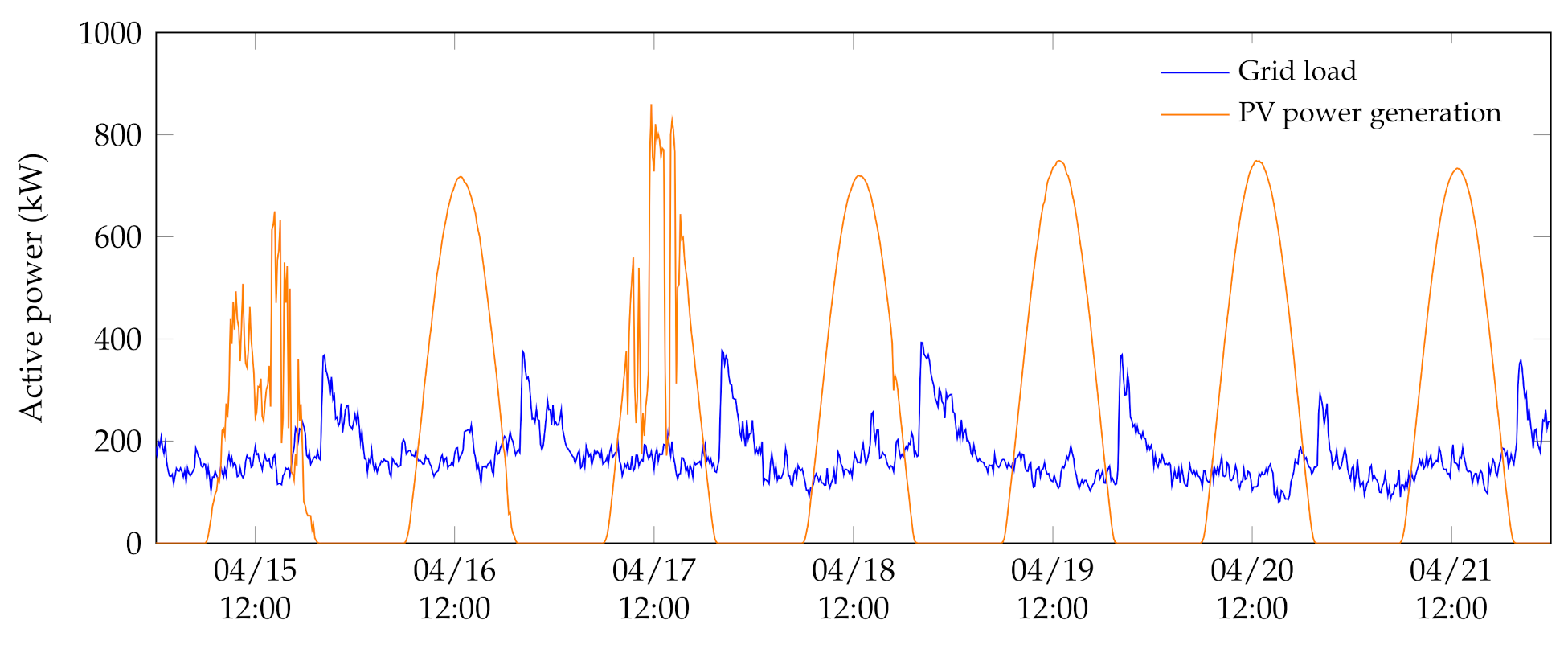
2.3. PV Power Generation Inferred from Global Horizontal Irradiance
2.4. Initial Operation Strategy
3. Intraday Forecasting of Stochastic Quantities
3.1. Introduction
3.2. Gaussian Process Regression
3.3. Data Description and Kernel Compositions
- Power grid loadHerein, the period of the data is 24 h and the structure of translates the daily periodic pattern. is used to capture the long-term trend of the data, namely the seasonal tendencies present in the power grid load. is used to capture the intraday variations observed in the data, namely intraday fluctuations due to behavioural patterns of end-users.
- Water demandmodels the daily periodic shape of the data and is used to fit the data’s intraday fluctuations. A brief kernel study leads to the conclusion that the simple addition of a squared exponential kernel is sufficient to have satisfactory results without adding too much computational burden to the model.
- Global horizontal irradiancemodels the daily periodic shape of the data and captures the intraday fluctuations present in these data. A thorough study has been conducted in [47] to determine the most suitable kernel composition for intraday GHI forecasting.
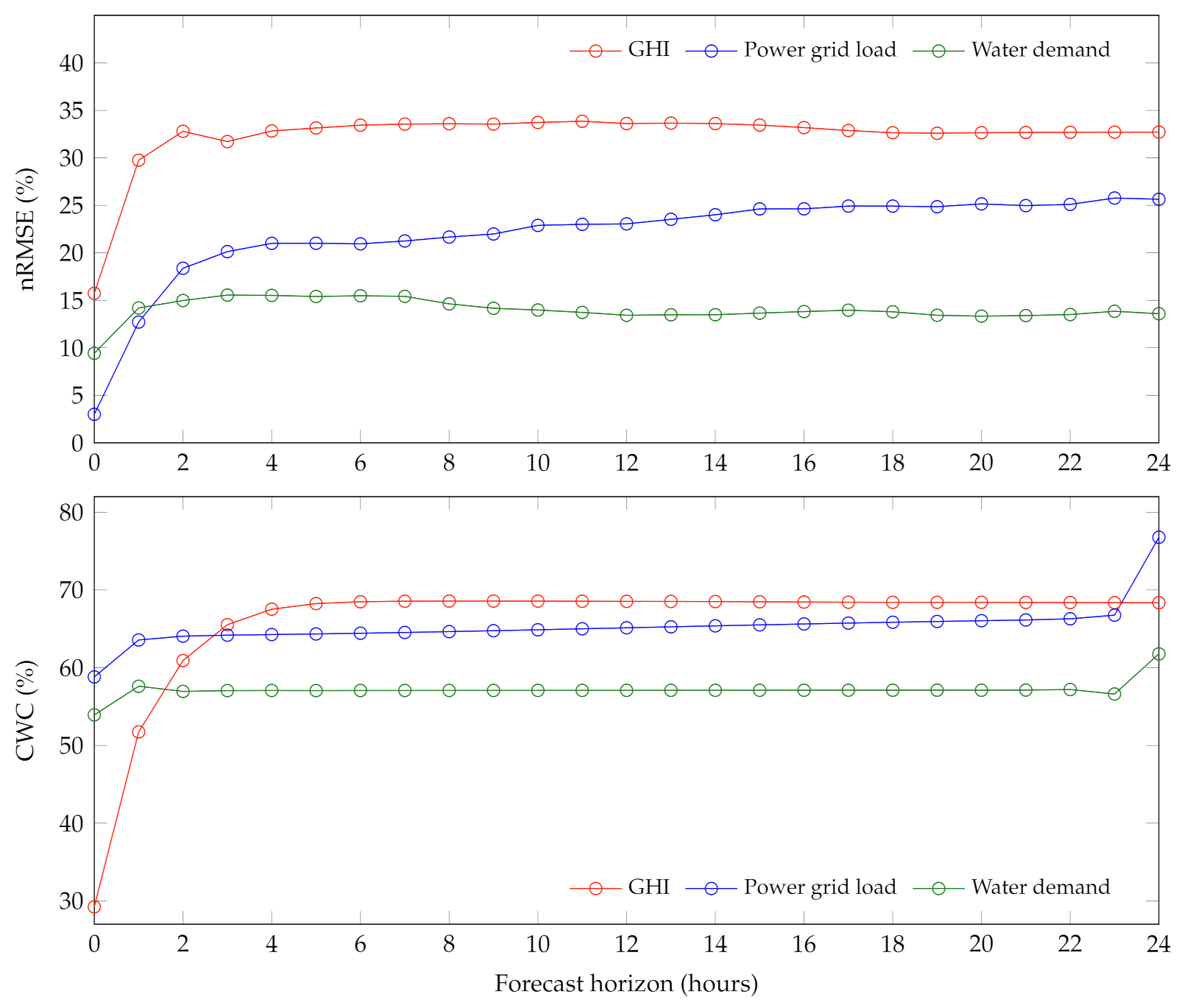
3.4. Forecasting Results
- The normalized root mean square error (nRMSE), expressed as follows:where are the test data, are the forecasts given by the models, and is the number of data points in the forecast horizon.
- The coverage width-based criterion () [50], defined as a combination of two different criteria, i.e., the prediction interval normalized average width () and the prediction interval coverage probability ().The criterion allows the surface area of the confidence intervals associated with the forecasts to be assessed:where R is the difference between the maximum and minimum in test data and and are the upper and lower bounds of the confidence interval, respectively.The criterion informs on the probability that measurements would fall within the confidence interval:where is used to detect whether the target value is in the confidence interval.The coverage width-based criterion () is then defined as follows:where () and () are parameters, and is defined such that:
4. Model-Based Predictive Control Strategy
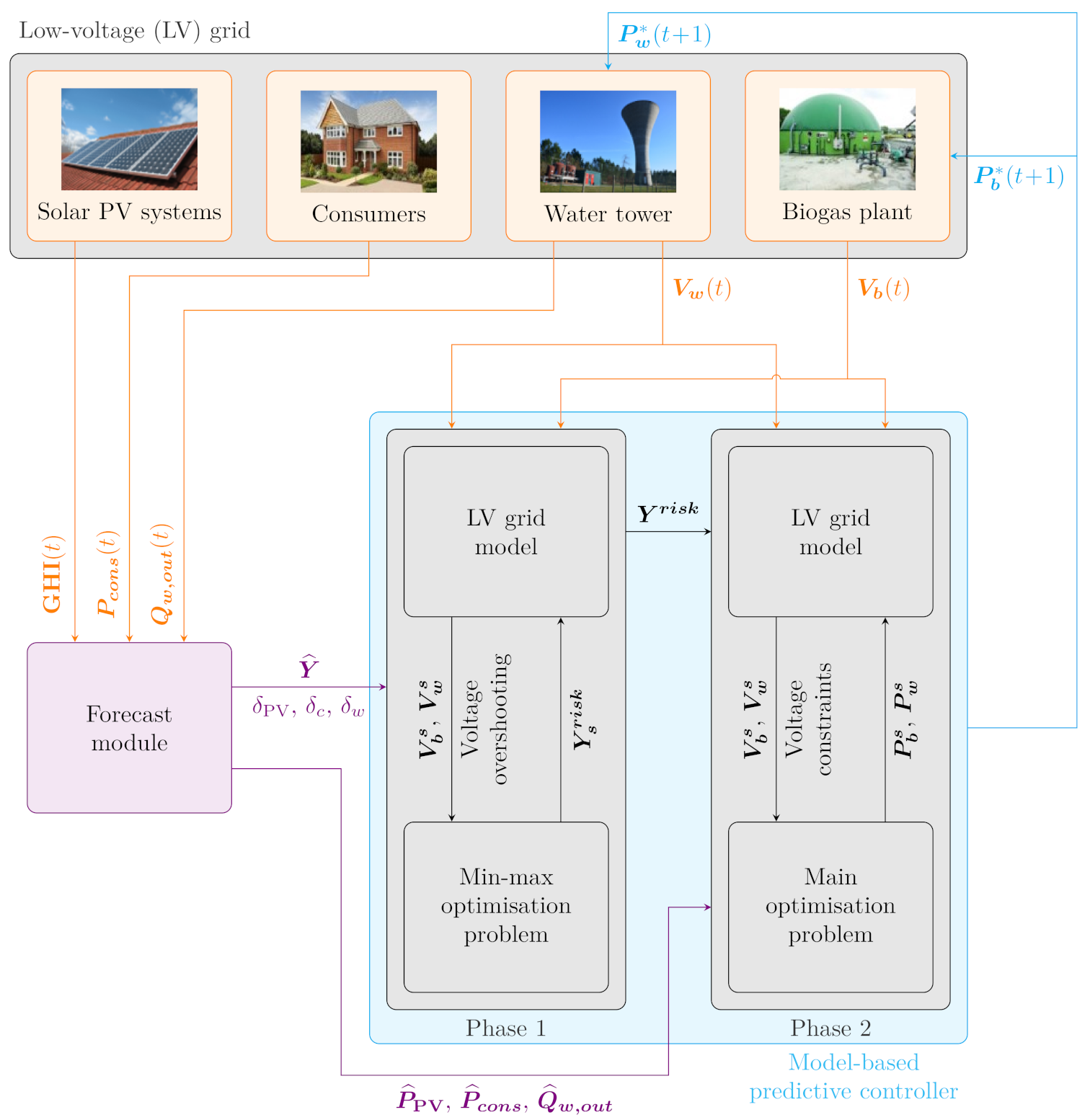
4.1. Inner-Workings of the Smart Management Scheme
- Data acquisition: measurements are taken of stored biogas volume and stored water volume and are injected into the predictive controller in order to update the system’s state. GHI and grid load are measured and water demand is inferred from measurements of water volume and incoming flow rate . These values are injected into the forecast module.
- Forecast module: measured values of the controller’s stochastic inputs (GHI, grid load, and water demand inferred from incoming flow rate) are added to the sliding databases of respective GPR models, which are then used to update the models’ parameters. Afterwards, the module produces updated forecasts of all three stochastic quantities over the forecast horizon, along with their respective confidence intervals. Lastly, GHI values and their corresponding confidence intervals are converted into PV power generation ones.
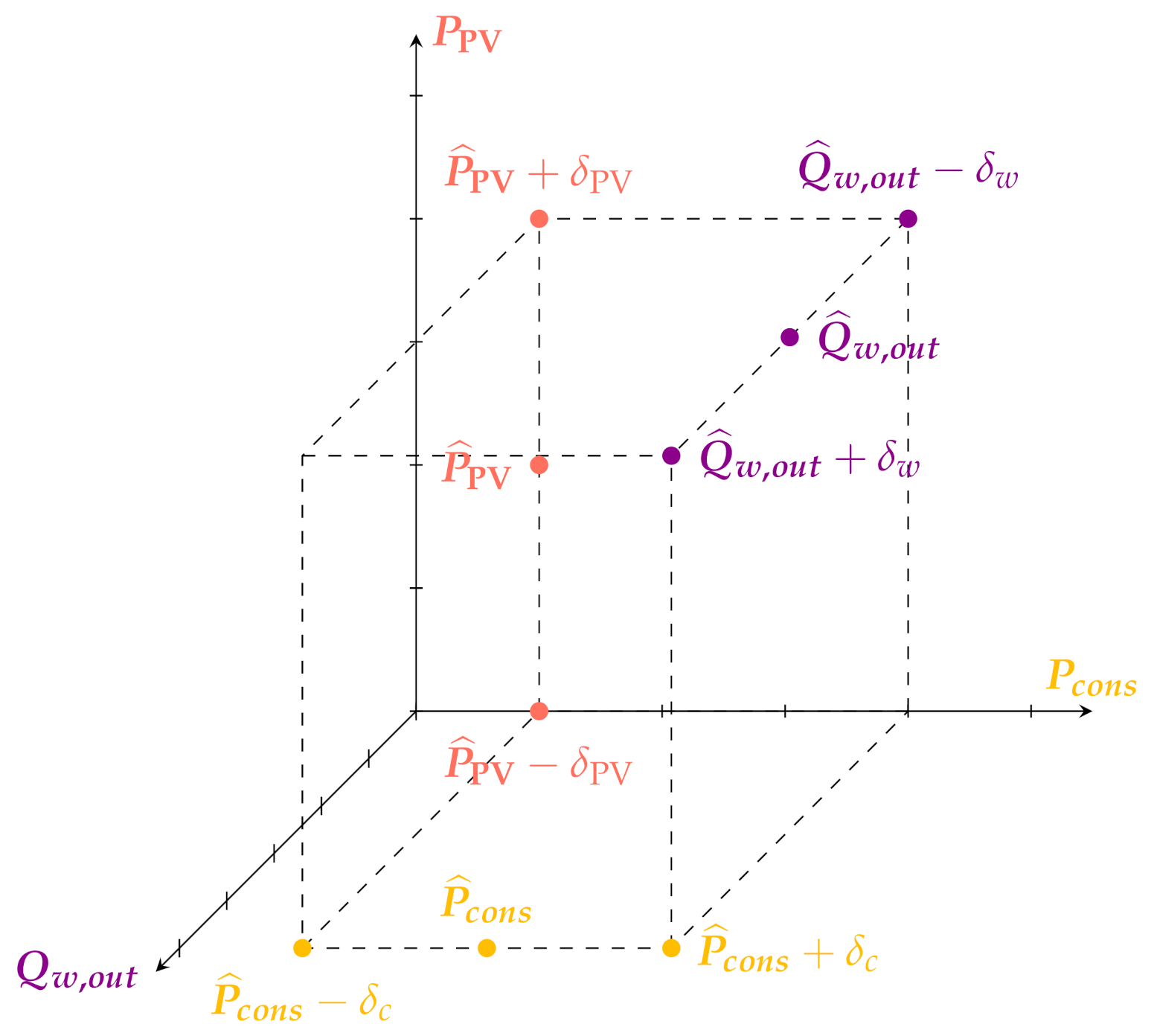
- Worst-case scenario: phase 1 of the controller’s decision-making process consists in determining the stochastic input values corresponding to the worst-case scenario of the following time slot, in terms of constraint violation. This bloc receives measurements of biogas volume and water volume, GPR forecasts of PV power generation, grid load, and water demand for the following time slot, and confidence intervals of GPR forecasts for the following time slot.
- Reduction of power supply/demand unbalance: phase 2 of the controller’s decision-making process consists in determining the flexible assets’ optimal setpoints. This bloc receives GPR forecasts of PV power generation, grid load, and water demand over the entire forecast horizon, as well as worst-case scenario input values of the following time slot, produced by phase 1.An optimisation algorithm searches for optimal setpoints of biogas plant power generation and water tower power consumption. It does so based on the optimisation problem defined in Section 4.2 and using the low-voltage grid model based on Kirchhoff laws to evaluate various constraints.
- Implementation of flexible assets’ setpoints: optimal setpoints of flexible assets are produced, the first step of which are implemented by the biogas plant and the water tower.
4.2. Main Optimisation Problem
- Biogas plant power bounds
- Switch time bounds
- Biogas volume constraints
- Water volume constraints
- Voltage constraints
4.3. The Worst-Case Scenario Approach
5. Results and Analysis
5.1. Evaluation Metrics
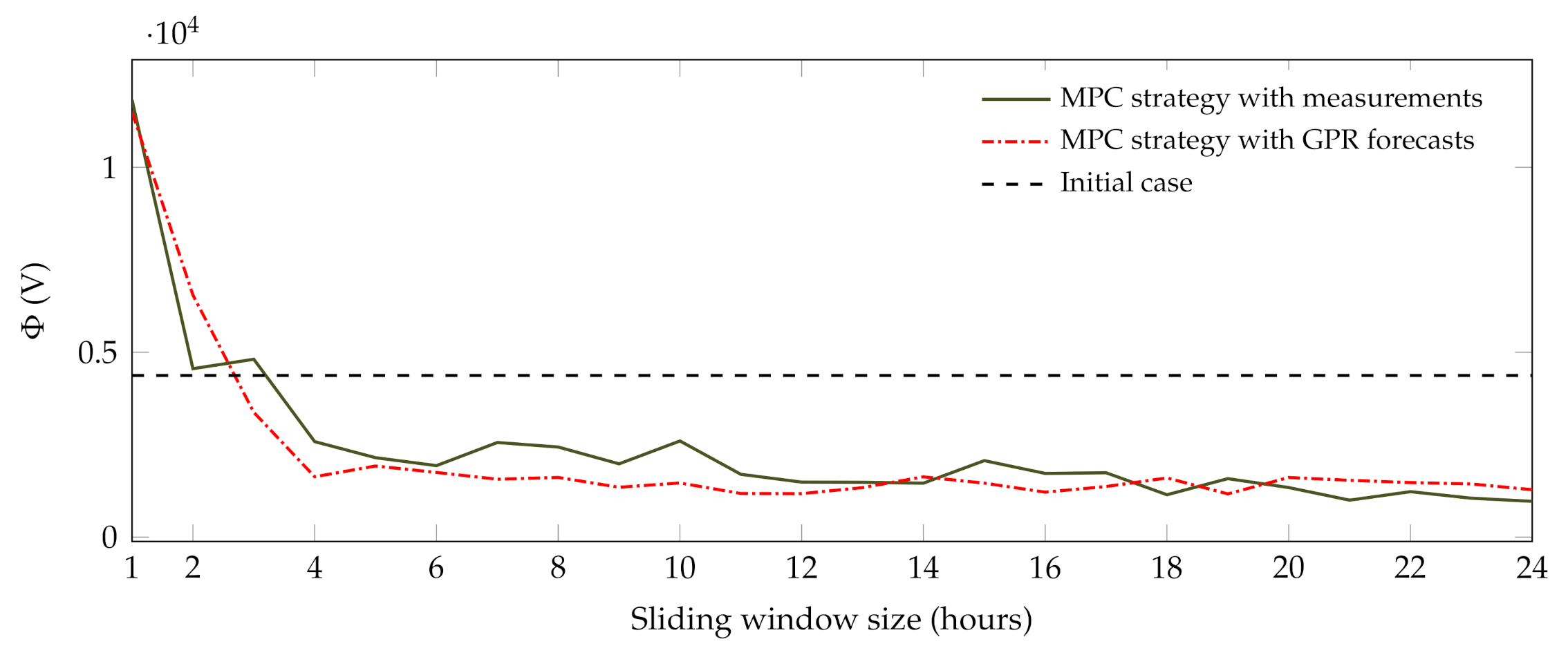
- Final value of the objective function: its square root () represents the cumulative gap between power supply and demand within the power distribution grid during the simulated week.
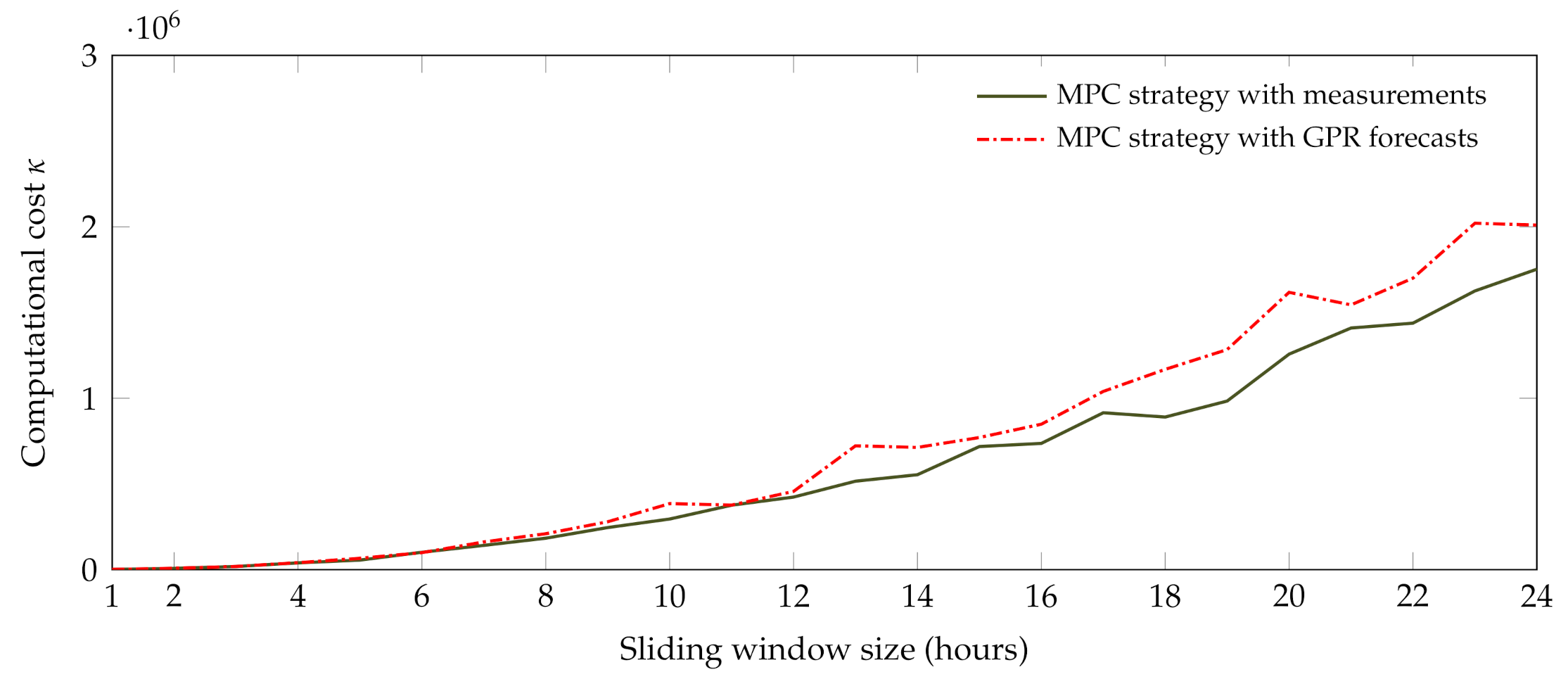
- Computational complexity : it is quantified by the mean number of objective function evaluations per window, weighted by its size. The number of objective function evaluations is provided as an output argument of the optimisation function “fmincon” in Matlab.
- Mean deviation from the forecasted values: let , , and be vectors grouping one-step-ahead forecasts (herein, 10-min forecasts) of PV power generation, grid load, and water demand, respectively, during the simulation period. This evaluation metric represents the mean deviation of stochastic input values from the ones forecasted at a one-step-ahead forecast horizon. , which is the mean deviation of PV power generation values () from the ones forecasted at a one-step-ahead forecast horizon (in ), is given by:, which is the mean deviation of grid load values () from the ones forecasted at a one-step-ahead forecast horizon (in ), is given by:, which is the mean deviation of water demand values () from the ones forecasted at a one-step-ahead forecast horizon (in ), is given by:
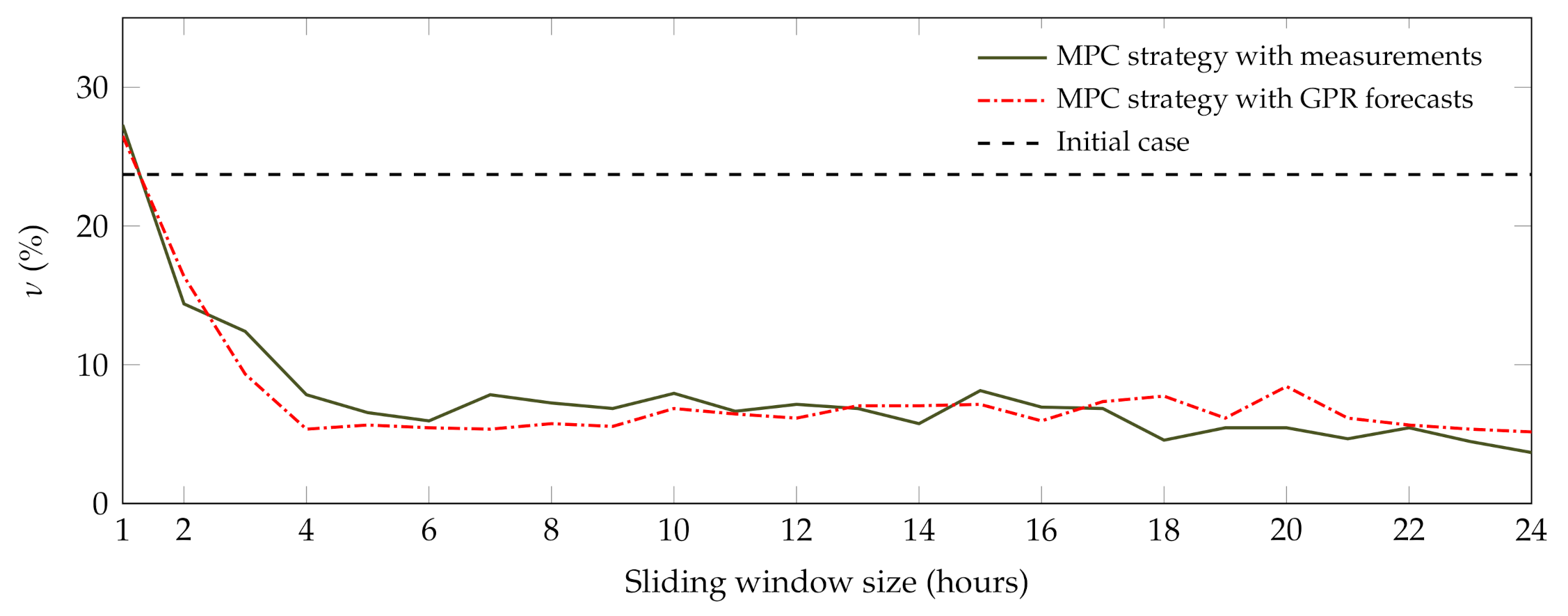
- Instances of voltage overshooting : in cases where the main optimisation problem has no feasible solution, overvoltage or undervoltage may occur in the power distribution grid. These are the instances that the present paper studies and attempts to reduce. This metric records the percentage of these instances during the simulation period.
- Surface area of voltage overshooting : this metric is complementary to the number of instances of voltage constraint violation. It represents the total surface area of voltage overshooting past the prescribed lower and upper voltage levels in the power distribution grid, during the simulated period. It is measured in volts and is calculated as follows:where N is the number of nodes in the power distribution grid, is the lower voltage threshold, is the upper voltage threshold, and , where , are voltage values in various nodes of the power distribution grid. Let be the matrix containing the measured stochastic inputs of the control strategy, over the simulation period, defined as follows:Note that voltage values across the power distribution grid are linked to the values of through Kirchhoff laws.
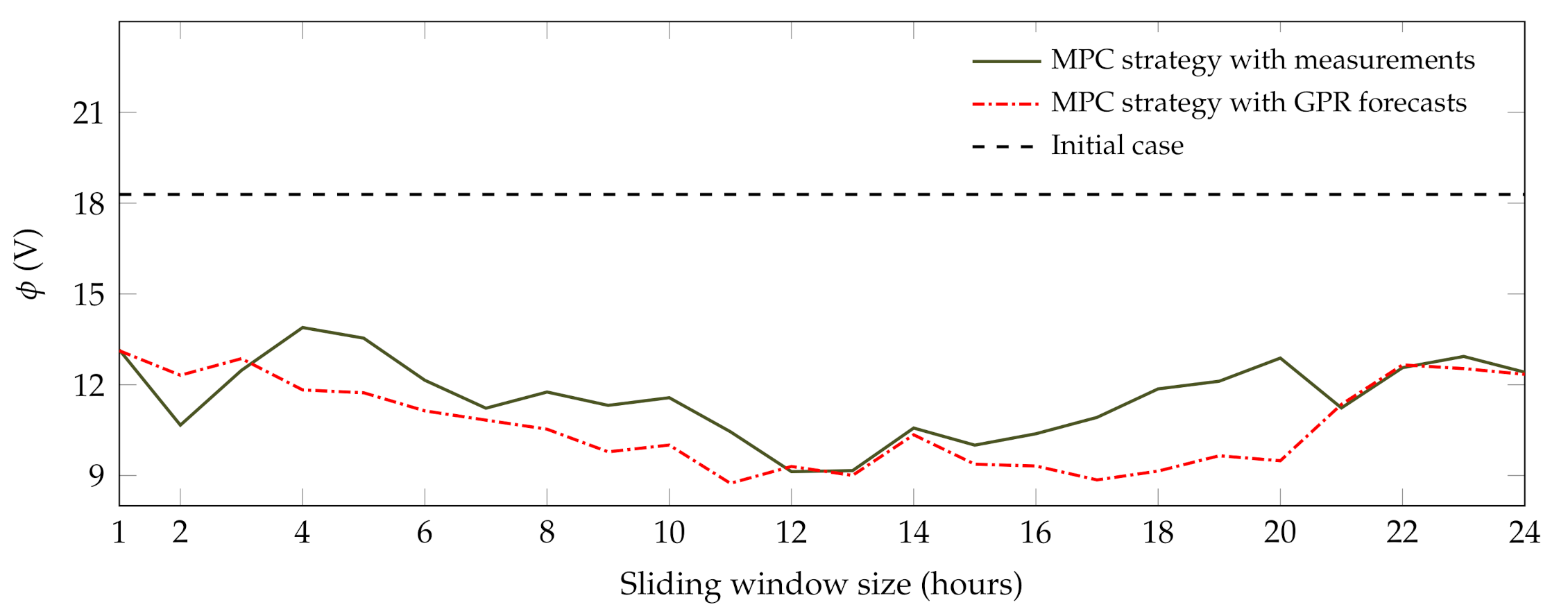
- Average voltage overshooting per time step : it corresponds to the mean of maximum voltage overshooting over the number of instances at which overshooting is observed during the simulation period. It is defined as follows:withwhere values of and are related through Kirchhoff laws.
5.2. Impact of Forecasting Errors on MPC Performance
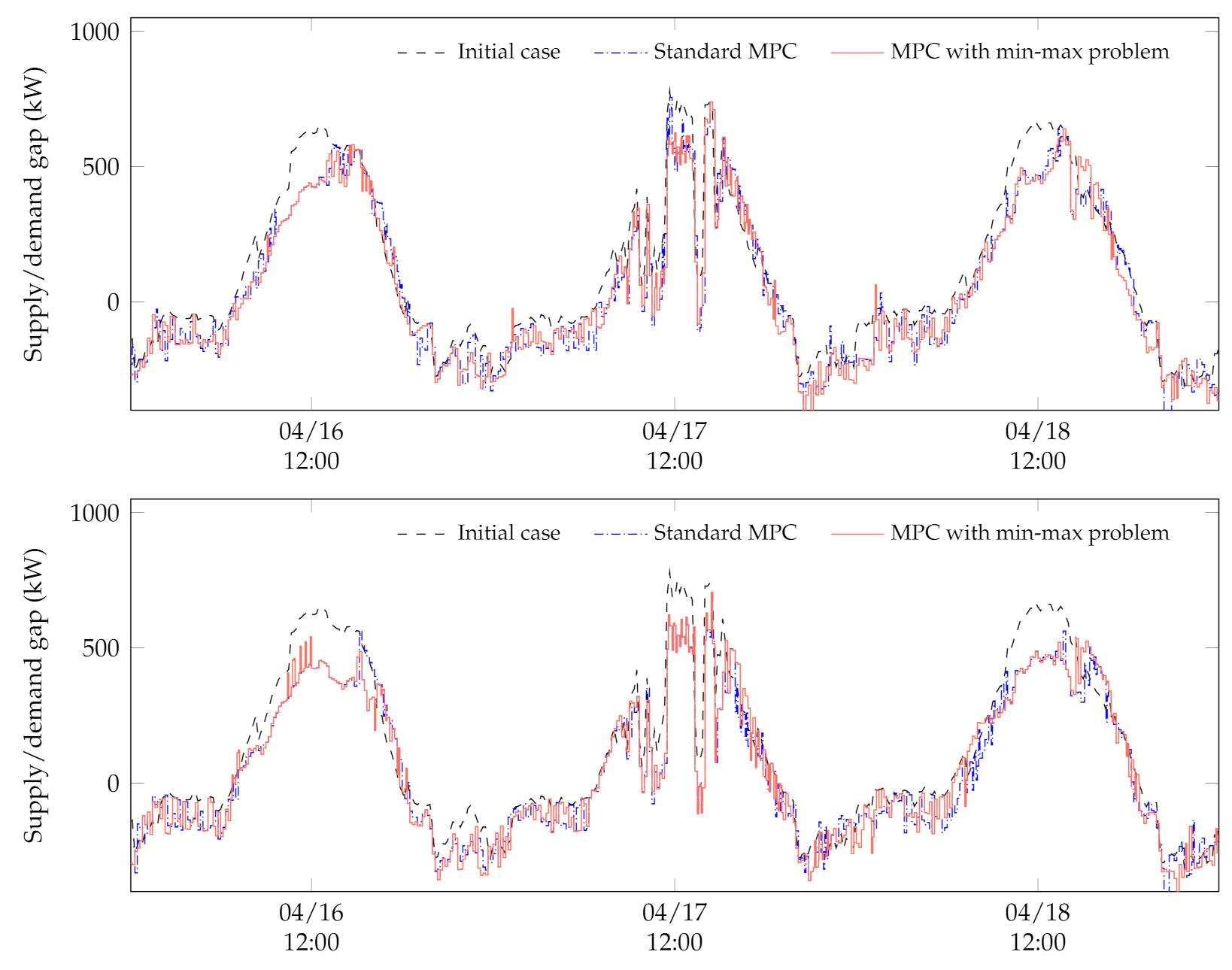
5.3. Contribution of the Worst-Case Approach
- Case 1. The initial case where no optimisation is carried out. The biogas plant has a constant power generation output. The water tower is subject to an ON/OFF controller, which activates its pump when a low-level sensor is triggered and deactivates it when a high-level sensor is triggered;
- Case 2. The predictive control strategy described in Section 4, with GPR forecasts of the PV power generation, grid load, and water demand used;
- Case 3. The amended control strategy proposed in this paper, based on the addition of the min–max problem to anticipate the worst-case scenario within the forecasts’ confidence intervals in terms of constraint violation.
5.4. Discussion
6. Conclusions and Prospects
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADEME | French agency for ecological transition |
| ANN | Artificial neural network |
| CWC | Coverage width-based criterion |
| DSM | Demand side management |
| GHI | Global horizontal irradiance |
| GP | Gaussian process |
| GPR | Gaussian process regression |
| LHV | Low heating value of the stored biogas |
| LSTM | Long short term memory |
| LV | Low voltage |
| MAS | Multi-agent systems |
| MINLP | Mixed-integer nonlinear programming |
| MPC | Model-based predictive control |
| MV/LV | Medium-voltage/low-voltage |
| nRMSE | Normalized root mean square error |
| OPF | Optimal power flow |
| PICP | Prediction interval coverage probability |
| PINAW | Prediction interval normalized average width |
| PROMES-CNRS | Processes, materials and solar energy |
| PV | Solar photovoltaics |
| RQ | Rational quadratic kernel (Gaussian process regression) |
| SE | Squared exponential kernel (Gaussian process regression) |
References
- Direction Technique ENEDIS. Principes D’étude et de Développement du Réseau Pour le Raccordement des Clients Consommateurs et Producteurs BT; Technical Report; ENEDIS: Paris La Défense, France, 2018. [Google Scholar]
- Abdi, H.; Beigvand, S.D.; La Scala, M. A review of optimal power flow studies applied to smart grids and microgrids. Renew. Sustain. Energy Rev. 2017, 71, 742–766. [Google Scholar] [CrossRef]
- Syranidis, K.; Robinius, M.; Stolten, D. Control techniques and the modeling of electrical power flow across transmission networks. Renew. Sustain. Energy Rev. 2018, 82, 3452–3467. [Google Scholar] [CrossRef]
- De Oliveira-De Jesus, P.M.; Henggeler Antunes, C. A detailed network model for distribution systems with high penetration of renewable generation sources. Electr. Power Syst. Res. 2018, 161, 152–166. [Google Scholar] [CrossRef]
- Joshi, K.; Pindoriya, N. Advances in Distribution System Analysis with Distributed Resources: Survey with a Case Study. Sustain. Energy Grids Netw. 2018, 15, 86–100. [Google Scholar] [CrossRef]
- Frank, S.; Rebennack, S. An introduction to optimal power flow: Theory, formulation, and examples. IIE Trans. 2016, 48, 1172–1197. [Google Scholar] [CrossRef]
- Riffonneau, Y.; Bacha, S.; Barruel, F.; Ploix, S. Optimal Power Flow Management for Grid Connected PV Systems With Batteries. IEEE Trans. Sustain. Energy 2011, 2, 309–320. [Google Scholar] [CrossRef]
- Strbac, G. Demand side management: Benefits and challenges. Energy Policy 2008, 36, 4419–4426. [Google Scholar] [CrossRef]
- Palensky, P.; Dietrich, D. Demand side management: Demand response, intelligent energy systems, and smart loads. IEEE Trans. Ind. Inf. 2011, 7, 381–388. [Google Scholar] [CrossRef] [Green Version]
- Meyabadi, A.F.; Deihimi, M.H. A review of demand-side management: Reconsidering theoretical framework. Renew. Sustain. Energy Rev. 2017, 80, 367–379. [Google Scholar] [CrossRef]
- Balijepalli, V.M.; Pradhan, V.; Khaparde, S.A.; Shereef, R. Review of Demand Response under Smart Grid Paradigm. In Proceedings of the ISGT2011-India, Kollam, India, 1–3 December 2011; pp. 236–243. [Google Scholar]
- Aghaei, J.; Alizadeh, M.I. Demand response in smart electricity grids equipped with renewable energy sources: A review. Renew. Sustain. Energy Rev. 2013, 18, 64–72. [Google Scholar] [CrossRef]
- Siano, P. Demand response and smart grids—A survey. Renew. Sustain. Energy Rev. 2014, 30, 461–478. [Google Scholar] [CrossRef]
- McArthur, S.D.J.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-Agent Systems for Power Engineering Applications—Part I: Concepts, Approaches, and Technical Challenges. IEEE Trans. Power Syst. 2007, 22, 1743–1752. [Google Scholar] [CrossRef] [Green Version]
- McArthur, S.D.J.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-Agent Systems for Power Engineering Applications – Part II: Technologies, Standards and Tools for Building Multi-Agent Systems. IEEE Trans. Power Syst. 2007, 22, 1753–1759. [Google Scholar] [CrossRef] [Green Version]
- Mocci, S.; Natale, N.; Pilo, F.; Ruggeri, S. Demand side integration in LV smart grids with multi-agent control system. Electr. Power Syst. Res. 2015, 125, 23–33. [Google Scholar] [CrossRef]
- You, S.; Segerberg, H. Integration of 100% micro-distributed energy resources in the low voltage distribution network: A Danish case study. Appl. Therm. Eng. 2014, 71, 797–808. [Google Scholar] [CrossRef]
- Haque, A.N.M.M.; Nguyen, P.H.; Vo, T.H.; Bliek, F.W. Agent-based unified approach for thermal and voltage constraint management in LV distribution network. Electr. Power Syst. Res. 2017, 143, 462–473. [Google Scholar] [CrossRef] [Green Version]
- Dkhili, N.; Eynard, J.; Thil, S.; Grieu, S. A survey of modelling and smart management tools for power grids with prolific distributed generation. Sustain. Energy Grids Netw. 2020, 21, 100284. [Google Scholar] [CrossRef]
- Dkhili, N.; Salas, D.; Eynard, J.; Thil, S.; Grieu, S. Innovative application of model-based predictive control for low-voltage power distribution grids with significant distributed generation. Energies 2021, 14, 1773. [Google Scholar] [CrossRef]
- Pesaran, M.H.A.; Huy, P.D.; Ramachandaramurthy, V.K. A review of the optimal allocation of distributed generation: Objectives, constraints, methods, and algorithms. Renew. Sustain. Energy Rev. 2017, 75, 293–312. [Google Scholar] [CrossRef]
- Sugihara, H.; Yokoyama, K.; Saeki, O.; Tsuji, K.; Funaki, T. Economic and efficient voltage management using customer-owned energy storage systems in a distribution network with high penetration of photovoltaic systems. IEEE Trans. Power Syst. 2013, 28, 102–111. [Google Scholar] [CrossRef]
- Karimyan, P.; Gharehpetian, G.B.; Abedi, M.R.; Gavili, A. Long term scheduling for optimal allocation and sizing of DG unit considering load variations and DG type. Int. J. Electr. Power Energy Syst. 2014, 54, 277–287. [Google Scholar] [CrossRef]
- Bruni, G.; Cordiner, S.; Mulone, V.; Rocco, V.; Spagnolo, F. A study on the energy management in domestic micro-grids based on model predictive control strategies. Energy Convers. Manag. 2015, 102, 50–58. [Google Scholar] [CrossRef]
- Prodan, I.; Zio, E. A model predictive control framework for reliable microgrid energy management. Int. J. Electr. Power Energy Syst. 2014, 61, 399–409. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model predictive control: A review of its applications in power electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Tøndel, P.; Johansen, T.A. Complexity reduction in explicit linear model predictive control. IFAC Proc. Vol. 2002, 35, 189–194. [Google Scholar] [CrossRef] [Green Version]
- Belotti, P.; Kirches, C.; Leyffer, S.; Linderoth, J.; Luedtke, J.; Mahajan, A. Mixed-integer nonlinear optimization. Acta Numer. 2013, 22, 1–131. [Google Scholar] [CrossRef] [Green Version]
- Burer, S.; Letchford, A.N. Non-convex mixed-integer nonlinear programming: A survey. Surv. Oper. Res. Manag. Sci. 2012, 17, 97–106. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Leyffer, S. Mixed Integer Nonlinear Programming; Springer: New York, NY, USA, 2012. [Google Scholar]
- Nocedal, J.; Wright, S.J. Numerical Optimization; Springer: New York, NY, USA, 2006. [Google Scholar]
- Tawarmalani, M.; Sahinidis, N.V.; Sahinidis, N. Convexification and Global Optimization in Continuous and Mixed-Integer Nonlinear Programming: Theory, Algorithms, Software, and Applications; Springer Science & Business Media: New York, NY, USA, 2002; Volume 65. [Google Scholar]
- Sahinidis, N. Mixed-integer nonlinear programming 2018. Optim. Eng. 2019, 20, 301–306. [Google Scholar] [CrossRef] [Green Version]
- Trespalacios, F.; Grossmann, I. Review of mixed-integer nonlinear and generalized disjunctive programming methods. Chem. Ing. Tech. 2014, 86, 991–1012. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M. Robust model predictive control: A survey. In Robustness in Identification and Control; Springer: Berlin/Heidelberg, Germany, 1999; pp. 207–226. [Google Scholar]
- Mayne, D.Q.; Seron, M.M.; Raković, S. Robust model predictive control of constrained linear systems with bounded disturbances. Automatica 2005, 41, 219–224. [Google Scholar] [CrossRef]
- Di Cairano, S.; Bernardini, D.; Bemporad, A.; Kolmanovsky, I.V. Stochastic MPC with learning for driver-predictive vehicle control and its application to HEV energy management. IEEE Trans. Control. Syst. Technol. 2013, 22, 1018–1031. [Google Scholar] [CrossRef]
- Köhler, J.; Soloperto, R.; Müller, M.A.; Allgöwer, F. A computationally efficient robust model predictive control framework for uncertain nonlinear systems. arXiv 2019, arXiv:1910.12081. [Google Scholar] [CrossRef] [Green Version]
- Fioriti, D.; Poli, D. A novel stochastic method to dispatch microgrids using Monte Carlo scenarios. Electr. Power Syst. Res. 2019, 175, 105896. [Google Scholar] [CrossRef]
- Lucia, S.; Finkler, T.; Basak, D.; Engell, S. A new robust NMPC scheme and its application to a semi-batch reactor example. IFAC Proc. Vol. 2012, 45, 69–74. [Google Scholar] [CrossRef]
- Lucia, S.; Andersson, J.A.; Brandt, H.; Diehl, M.; Engell, S. Handling uncertainty in economic nonlinear model predictive control: A comparative case study. J. Process. Control. 2014, 24, 1247–1259. [Google Scholar] [CrossRef]
- Raimondo, D.M.; Limon, D.; Lazar, M.; Magni, L.; ndez Camacho, E.F. Min-max model predictive control of nonlinear systems: A unifying overview on stability. Eur. J. Control. 2009, 15, 5–21. [Google Scholar] [CrossRef]
- Limón, D.; Alamo, T.; Salas, F.; Camacho, E.F. Input to state stability of min–max MPC controllers for nonlinear systems with bounded uncertainties. Automatica 2006, 42, 797–803. [Google Scholar] [CrossRef] [Green Version]
- Skoplaki, E.; Palyvos, J.A. On the temperature dependence of photovoltaic module electrical performance: A review of efficiency/power correlations. Sol. Energy 2009, 83, 614–624. [Google Scholar] [CrossRef]
- Jakhrani, A.Q.; Othman, A.K.; Rigit, A.R.H.; Samo, S.R. Comparison of Solar Photovoltaic Module Temperature Models. World Appl. Sci. J. (Special Issue Food Environ.) 2011, 14, 1–8. [Google Scholar]
- Tolba, H.; Dkhili, N.; Nou, J.; Eynard, J.; Thil, S.; Grieu, S. GHI forecasting using Gaussian process regression: Kernel study. IFAC-PapersOnLine 2019, 52, 455–460. [Google Scholar] [CrossRef]
- Gbémou, S.; Tolba, H.; Thil, S.; Grieu, S. Global horizontal irradiance forecasting using online sparse Gaussian process regression based on quasiperiodic kernels. In Proceedings of the 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Genova, Italy, 4–10 June 2019. [Google Scholar]
- Tolba, H.; Dkhili, N.; Nou, J.; Eynard, J.; Thil, S.; Grieu, S. Multi-Horizon Forecasting of Global Horizontal Irradiance Using Online Gaussian Process Regression: A Kernel Study. Energies 2020, 13, 4184. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; The MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Khosravi, A.; Nahavandi, S.; Creighton, D.; Atiya, A.F. Lower upper bound estimation method for construction of neural network-based prediction intervals. IEEE Trans. Neural Netw. 2010, 22, 337–346. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Metric | Case 1 | Case 2 | Case 3 | ||
|---|---|---|---|---|---|
| 4-h | 10-h | 4-h | 10-h | ||
| () | 10,035 | 8984 | 8700 | 8966 | 8648 |
| (–) | – | 40,872 | 385,320 | 39,700 | 358,990 |
| () | – | – | – | 16.26 | 19.41 |
| () | – | – | – | 5.56 | 6.73 |
| () | – | – | – | −4.24 × 10−15 | −6.41 × 10−16 |
| (%) | 23.71 | 5.36 | 6.85 | 4.96 | 6.35 |
| () | 4371.4 | 1632.7 | 1464.6 | 1464.5 | 1176.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dkhili, N.; Eynard, J.; Thil, S.; Grieu, S. Resilient Predictive Control Coupled with a Worst-Case Scenario Approach for a Distributed-Generation-Rich Power Distribution Grid. Clean Technol. 2021, 3, 629-655. https://doi.org/10.3390/cleantechnol3030038
Dkhili N, Eynard J, Thil S, Grieu S. Resilient Predictive Control Coupled with a Worst-Case Scenario Approach for a Distributed-Generation-Rich Power Distribution Grid. Clean Technologies. 2021; 3(3):629-655. https://doi.org/10.3390/cleantechnol3030038
Chicago/Turabian StyleDkhili, Nouha, Julien Eynard, Stéphane Thil, and Stéphane Grieu. 2021. "Resilient Predictive Control Coupled with a Worst-Case Scenario Approach for a Distributed-Generation-Rich Power Distribution Grid" Clean Technologies 3, no. 3: 629-655. https://doi.org/10.3390/cleantechnol3030038