
Robust Control and Thermal Analysis of a Reduced Model of Kirchhoff Composite Plate with Random Distribution of Thermopiezoelectric Sensors and Actuators


Abstract
:1. Introduction
2. Mathematical Modeling
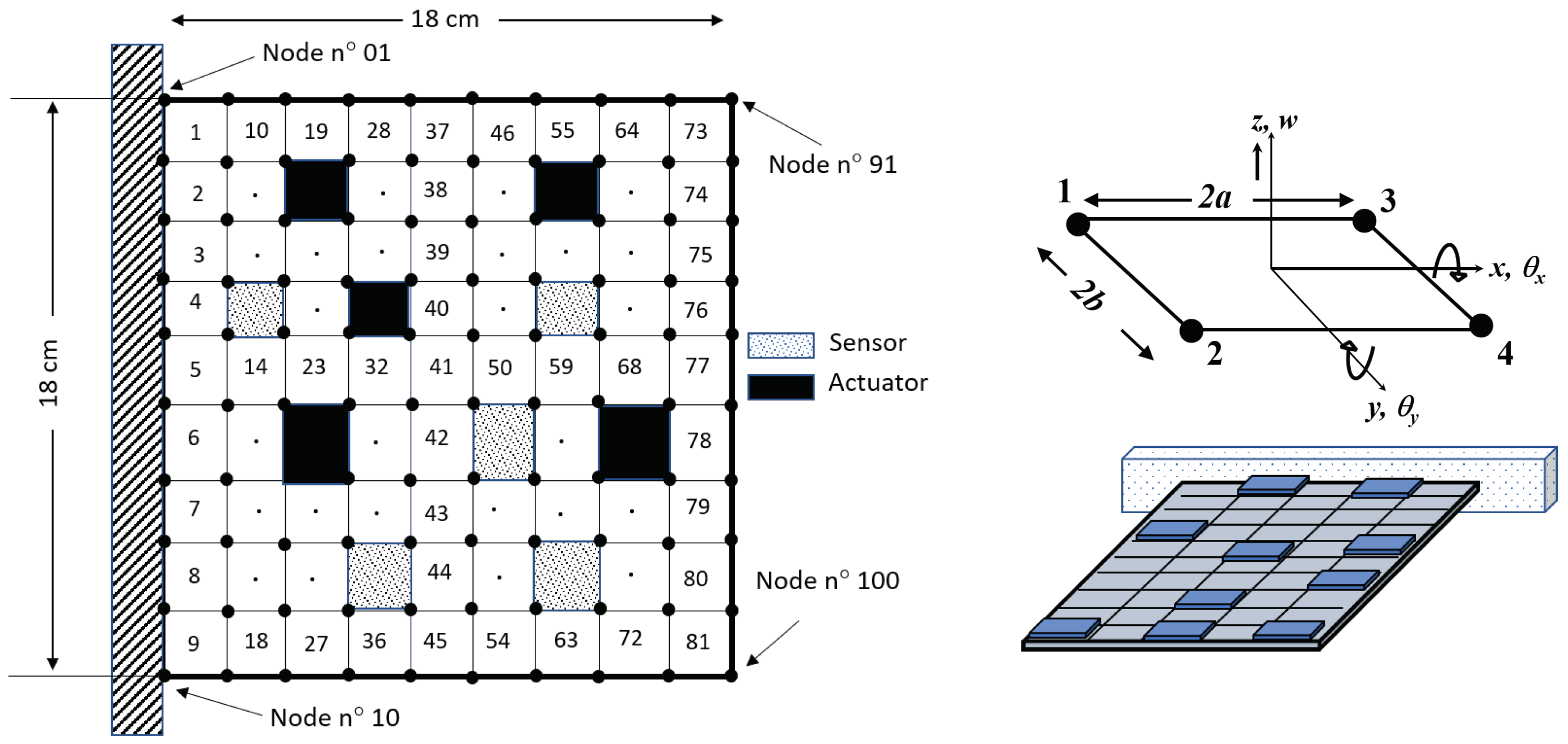
2.1. Kirchhoff Plate Model
2.2. Constitutive Equations of Thermopiezoelectric Material
2.3. Dynamic Equation
3. Finite Element Formulation
3.1. Full Order Process
3.2. Modal Analysis
3.3. General Reduction Model
3.4. Monte Carlo Method
4. Control Design
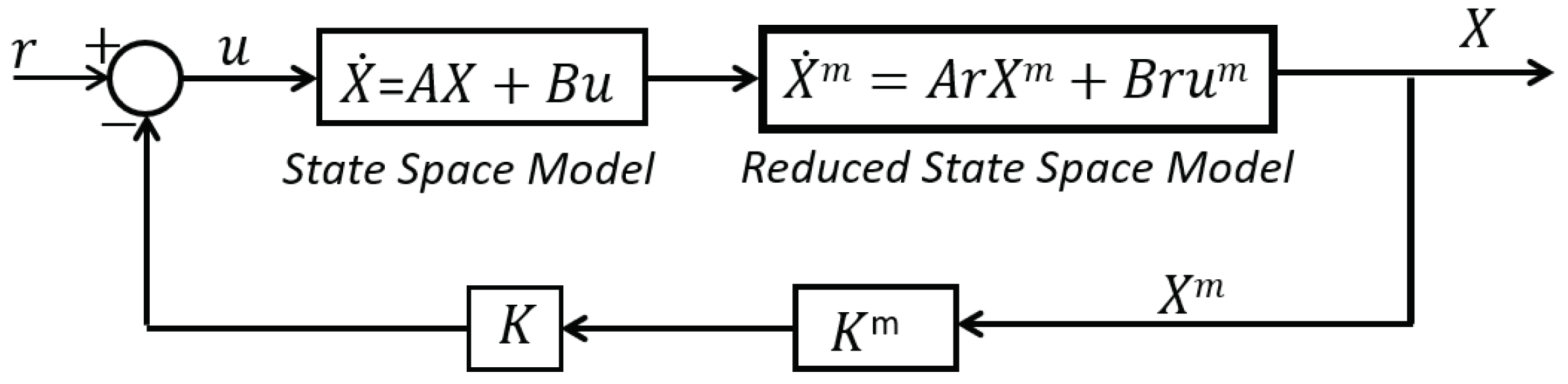
4.1. State Space Model
4.2. LQR Control
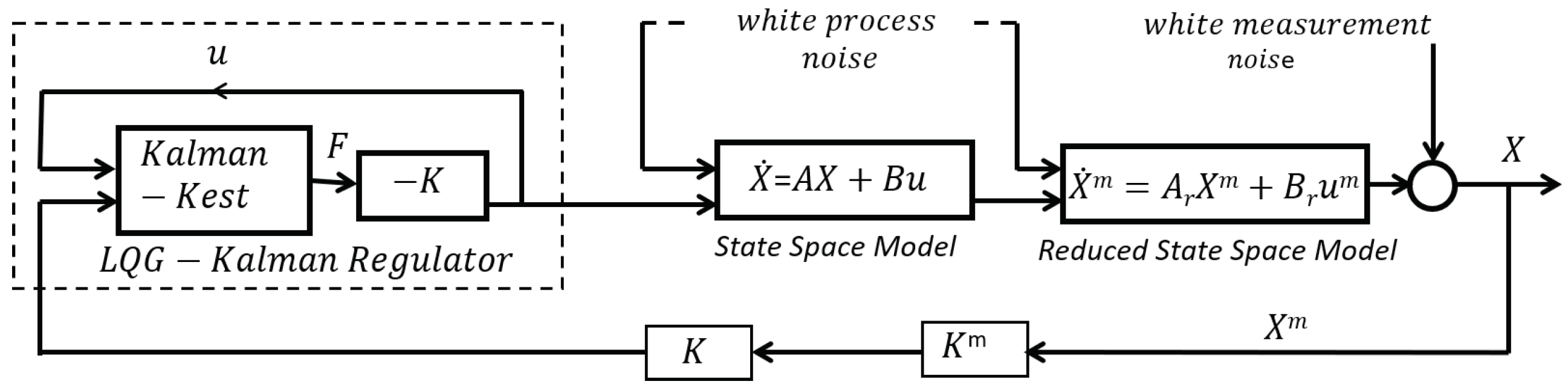
4.3. LQG-Kalman Estimator
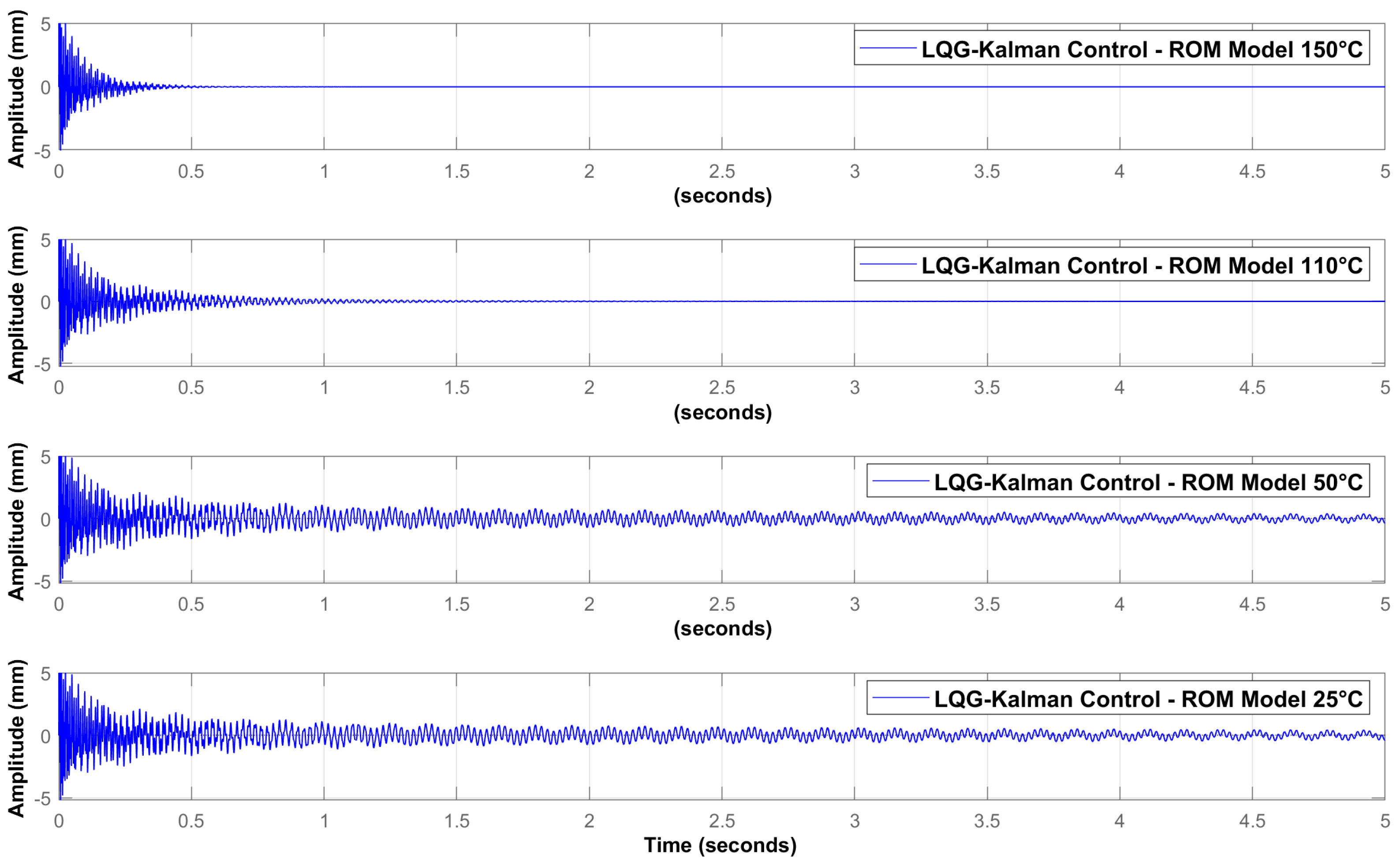
5. Discussion
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Tauchert, T. Piezotheelmoelastic behavior of a laminated plate. J. Therm. Stress. 1992, 15, 25–37. [Google Scholar] [CrossRef]
- Lee, H.; Saravanos, D. Generalized finite element formulation for smart multilayered thermal piezoelectric composite plates. Int. J. Solids Struct. 1997, 34, 3355–3371. [Google Scholar] [CrossRef]
- Caruso, G.; Galeani, S.; Menini, L. Active vibration control of an elastic plate using multiple piezoelectric sensors and actuators. Simul. Model. Pract. Theory 2003, 11, 403–419. [Google Scholar] [CrossRef]
- Kumar, K.; Narayanan, S. The optimal location of piezoelectric actuators and sensors for vibration control of plates. Smart Mater. Struct. 2007, 16, 2680–2691. [Google Scholar] [CrossRef]
- Dong, X.; Meng, G.; Peng, J. Vibration control of piezoelectric smart structures based on system identification technique: Numerical simulation and experimental study. J. Sound Vib. 2006, 297, 680–693. [Google Scholar] [CrossRef]
- Xu, S.; Koko, T. Finite element analysis and design of actively controlled piezoelectric smart structure. Finite Elem. Anal. Des. 2004, 40, 241–262. [Google Scholar] [CrossRef]
- Kim, H.; Sohn, J.; Choi, S. Vibration control of a cylindrical shell structure using macro fibre composite actuators. Mech. Based Des. Struct. Mach. 2011, 39, 491–506. [Google Scholar] [CrossRef]
- Kusculuoglu, Z.; Royston, T. Finite element formulation for composite plates with piezoceramic layers for optimal vibration control applications. Smart Mater. Struct. 2005, 14, 1139–1153. [Google Scholar] [CrossRef]
- Tzou, H.; Bao, Y. Nonlinear piezothermoelasticity and multi-field actuations. J. Vib. Acoust. 1997, 119, 374–381. [Google Scholar] [CrossRef]
- Sanbi, M.; Saadani, R.; Sbai, K.; Rahmoune, M. Thermoelastic and Pyroelectric Couplings Effects on Dynamics and Active Control of Smart Piezolaminated Beam Modeled by Finite Element Method. Smart Mater. Res. 2014, 2014, 145087.1–145087.10. [Google Scholar] [CrossRef]
- Sanbi, M.; Saadani, R.; Sbai, K.; Rahmoune, M. Thermal Effects on Vibration and Control of Piezocomposite Kirchhoff Plate Modeled by Finite Elements Method. Smart Mater. Res. 2015, 2015, 1–15. [Google Scholar] [CrossRef]
- Mitchell, J.; Reddy, H. A refined hybrid platetheoryfor composite laminates with piezoelectric laminae. Int. J. Solids Struct. 1995, 32, 2345–2367. [Google Scholar] [CrossRef]
- Gu, H.; Chattopadhyay, A.; Li, J.; Zhou, X. A higher order temperature theory for coupled thermopiezoelectric-mechanical modeling of smart composites. Int. J. Solids Struct. 2000, 37, 6479–6497. [Google Scholar] [CrossRef]
- Hughes, P.; Skelton, R. Modal truncation for flexible spacecraft. J. Guid. Control 1981, 4, 291–297. [Google Scholar] [CrossRef]
- Willcox, K.; Peraire, J. Balanced model reduction via the proper orthogonal decomposition. AIAA J. 2002, 40, 2323–2330. [Google Scholar] [CrossRef]
- Hsieh, W. Nonlinear principal component analysis by neural networks. Tellus A 2002, 53, 2323–2330. [Google Scholar] [CrossRef]
- Callahan, J.; Avitabile, P.; Riemer, R. System equivalent reduction expansion process (SEREP). In Proceedings of the 7th International Modal Analysis Conference, Las Vegas, NV, USA, 30 January–2 February 1989; Union College: Schenectady, NY, USA, 1989; pp. 29–37. [Google Scholar]
- Sharma, M.; Singh, S.; Sachdeva, B. Modal control of a plate using fuzzy logic controller. Smart Mater. Struct. 2007, 16, 1331–1341. [Google Scholar] [CrossRef]
- Tanaka, N.; Sanada, T. Modal control of a rectangular plate using smart sensors and smart actuators. Smart Mater. Struct. 2007, 16, 36. [Google Scholar] [CrossRef]
- Rader, A.; Afagh, F.; Yousefi-Koma, A.; Zimcik, D. Optimization of piezoelectric actuator configuration on a flexible fin for vibration control using genetic algorithms. J. Intell. Mater. Syst. Struct. 2007, 18, 1015. [Google Scholar] [CrossRef]
- Spier, C.; Bruch, J.; Sloss, J.; Adali, S.; Sadek, I. Placement of multiple piezo patch sensors and actuators for a cantilever beam to maximize frequencies and frequency gaps. J. Vib. Control 2009, 15, 643. [Google Scholar] [CrossRef]
- Sharma, S.; Vig, R.; Kumar, N. Temperature compensation in a smart structure by the application of DC bias on piezoelectric patches. J. Intell. Mater. Struct. 2016, 27, 2524–2535. [Google Scholar] [CrossRef]
- Gupta, V.; Sharma, M.; Thakur, N. Active structural vibration control: Robust to temperature variations. Mech. Syst. Signal Process. 2012, 33, 80. [Google Scholar] [CrossRef]
- Nowacki, W. Some general theorems of thermopiezoelectricity. J. Therm. Stress. 1978, 1, 171–182. [Google Scholar] [CrossRef]
- Lal, H.; Sarkar, S.; Gupta, S. Stochastic model order reduction in randomly parametered linear dynamical systems. Appl. Math. Model. 2017, 51, 744–763. [Google Scholar] [CrossRef]
- Anderson, B.; Moore, J. Optimal Filtering; Thomas Kailath Editor: Piscataway, NJ, USA, 1979. [Google Scholar]
- Simon, D.; Curadelli, O.; Ambrosini, D. Kalman Filtering for fuzzy discrete time dynamic systems. Appl. Soft Comput. 2003, 3, 191–207. [Google Scholar] [CrossRef]
- Garrido, H.; Curadelli, O.; Ambrosini, D. A straightforward method for tuning of Lyapunov based controllers in semi active vibration control applications. J. Sound Vib. 2014, 333, 1119–1131. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Actuators PZT | Sensors PVDF | Host Plate |
|---|---|---|---|
| Length (cm) | 18 | ||
| Width (cm) | 18 | ||
| Thickness (cm) | |||
| Piezoelectric constant (pm/V) | −220, −220, 374, 670, 670 | −22, 22, 0, 0, 0 | — |
| Permittivity (nF/m) | 15, 3 | 0, 1062 | — |
| Density (Kg/m) | 7600 | 2700 | 1800 |
| Young’s modulus E (GPa) | 63 | 70 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
EI Khaldi, L.; Sanbi, M.; Saadani, R.; Rahmoune, M. Robust Control and Thermal Analysis of a Reduced Model of Kirchhoff Composite Plate with Random Distribution of Thermopiezoelectric Sensors and Actuators. J. Compos. Sci. 2022, 6, 242. https://doi.org/10.3390/jcs6080242
EI Khaldi L, Sanbi M, Saadani R, Rahmoune M. Robust Control and Thermal Analysis of a Reduced Model of Kirchhoff Composite Plate with Random Distribution of Thermopiezoelectric Sensors and Actuators. Journal of Composites Science. 2022; 6(8):242. https://doi.org/10.3390/jcs6080242
Chicago/Turabian StyleEI Khaldi, Loukmane, Mustapha Sanbi, Rachid Saadani, and Miloud Rahmoune. 2022. "Robust Control and Thermal Analysis of a Reduced Model of Kirchhoff Composite Plate with Random Distribution of Thermopiezoelectric Sensors and Actuators" Journal of Composites Science 6, no. 8: 242. https://doi.org/10.3390/jcs6080242