
Selection of Take-Off and Landing Sites for Firefighter Drones in Urban Areas Using a GIS-Based Multi-Criteria Model



1
School of Architecture, Civil, Environmental and Energy Engineering, Kyungpook National University, Daegu 41566, Republic of Korea
2
Department of Fire and Disaster Prevention Engineering, Changshin University, Changwon 51352, Republic of Korea
3
Department of Architecture, Kyungil University, Gyeongsan 38428, Republic of Korea
*
Authors to whom correspondence should be addressed.
Drones 2022, 6(12), 412; https://doi.org/10.3390/drones6120412
Submission received: 21 October 2022
/
Revised: 28 November 2022
/
Accepted: 9 December 2022
/
Published: 14 December 2022
Abstract
:Currently, firefighter drones in Republic of Korea underperform due to the lack of take-off site reservations in advance. In order to address this issue, this study proposes a GIS-based multi-criteria model for selecting take-off and landing sites for firefighter drones in urban areas. Seven criteria were set for the selection of take-off and landing sites based on building roofs. Buildings at 318 sites in the target area that satisfy all seven criteria were extracted and grouped according to the geographical location. Among the grouped buildings, 11 sites were reselected through network analysis and central feature methods. In addition, two more sites were selected through the relaxation of criteria for take-off and landing sites for firefighter drones. Validation was performed using the data of building fires that occurred in the target area in the past. The results confirmed the effectiveness of the method applied in this study, as potential responses could be verified for ≥95% of the buildings with a past fire incidence. By introducing a simple methodology in which a multi-criteria model is built through spatial information, this study contributes to the literature on improving operational firefighting strategies and provides practitioners and policymakers with valuable insights to support decision-making.
1. Introduction
Recently, unmanned aerial vehicles (UAVs) have witnessed rapid advancements in technology. UAVs have numerous applications in different fields, ranging from aerial photography to public health care, disaster management, inspection of industrial facilities, vegetation mapping, wetland ecosystem monitoring, traffic monitoring, and delivery of automated external defibrillators (AEDs) and other items [1,2,3,4,5,6,7,8,9,10,11,12] based on the ability to efficiently carry out diverse tasks, including those with reduced operational cost compared to satellites and conventional aircraft, those in areas preventing ready access by human resources, and those requiring high mobility unaltered by traffic congestion or topography [13].
Further, UAVs have proved their high utility in the field of firefighting worldwide. In the case of a large-scale explosion accident, firefighters might not be able to access the accident scene due to the release of chemical substances and poisonous gases. Thus, firefighter drones are used to search and scan the scene to transfer the data collected related to the accident to the command unit [14]. Another use of UAVs is to gather and provide spatial information on areas that require a focused fire suppression activity, in which firefighters identify the hotspots via a thermal imaging camera prior to the onset of the operation [15]. As such, firefighter drones are utilized in various activities in the field of firefighting as they provide a solid basis for decision-making by the command unit [16,17].
The aforementioned advantages have led to the introduction and utilization of firefighter drones to perform tasks by Republic of Korea’s National 119 Rescue Headquarters in September 2013. According to the National Fire Agency (NFA), a total of 200 firefighter drones have been in operation 2231 times nationwide as of September 2020. These drones comprised 159 drones for actual tasks and 41 drones for training. The operational tasks included 632 fire incidences and 1599 rescue missions. In addition, the efficiency of firefighter drones applied in firefighting scenes in Republic of Korea has been verified through actual tasks and experiments (up to 3- to 5-fold reduced time of arrival at the scene and up to 3- to 30-fold reduced time of locating the victims), with a trend of the annual increase in operational performance of firefighter drones [18].
The operation of UAVs in urban areas that are characterized by high-rise buildings and complex structural changes could be difficult because of a variety of factors that interfere with flight. The high-rise buildings prevent a steady line of control, while the multipath effects, interference, or antenna obscuration by the Global Navigation Satellite System (GNSS) degrade data performance, which reduces the accuracy of GPS-based positioning or causes the complete loss of signals [19,20]. The 2022 World Population of the United Nations reports that the number of inhabitants per square km in Republic of Korea is 523.8 [21] and the consequent high population density and high-rise buildings pose challenges to the take-off site reservation on ground surfaces in these areas.
Heo (2020) showed that the time taken to secure a take-off site for the use of a firefighter drone in an urban area ranged between 1 min at a minimum and 30 min at a maximum (3 min 32 s on average) in the past five years in Republic of Korea, with the percentage of attempts at re-securing a take-off site due to a problem in operation being as big as 95% [22]. This lack of take-off site reservation not only delays the overall time of the firefighter drone entering the scene of an accident but also induces psychological pressure regarding operating hasty flights to compensate for the delayed time as well as having an effect on the use of drones being avoided at the firefighting scene. Thus, securing a take-off site in advance is a prerequisite for the use of a firefighter drone.
To provide a solution for this issue, previous studies on automated drone landing have suggested a method of landing the drone on a horizontal topography (e.g., parks or meadows) instead of searching for a high one in an environment with uncertain probabilities [23]. The rarity of such emergency landing sites as parks and meadows in urban areas nonetheless raises the problem of restricted access [24]. In the case of playgrounds with an abundance of dry sand, small particles (e.g., dust and sand) can enter the drone, accelerating the mechanical erosion of components and sensors [25]. There are also various problems, such as the difficulty of ensuring safety for drone operation through traffic control of vehicles and pedestrians (i.e., the invasion of the landing site by citizens and the increased psychological anxiety due to nearby obstacles [22].
However, flat-roof buildings are present in high frequency in urban areas, and they can provide safe take-off and landing sites for drones [24]. Hence, building roofs may provide a solution for the site reservation problem. A flat-roof building also offers an adequate area to house the drone-related infrastructure, and as the building roof structure is flat and horizontal without surrounding obstacles, the safety of drone operation may be guaranteed.
This study thus suggests a methodology for selecting suitable buildings for the operation of firefighter drones in Republic of Korea, considering the set factors of candidate take-off sites in the target urban areas, using a multi-criteria model. It aims at improving the current status of firefighter drones in Republic of Korea, which suffer from limited effectiveness due to the lack of take-off site reservation in advance, particularly in urban areas. We validate our methodology through the application in urban areas in Republic of Korea.
2. Background: A Rationale for Developing Our Methodology for the Selection of Take-Off and Landing Sites for Firefighter Drones in Urban Areas
Although numerous studies have been conducted regarding drone stations, most focused on the site selection for delivery drone stations using different algorithms (e.g., dynamic programming for the traveling salesperson problem) [26] and the selection of target site locations and numbers for AED-transport drones using data of past cases, such as those involving an out-of-hospital cardiac arrest (OHCA) [2,3,27,28,29,30,31].
Meanwhile, only a few studies have investigated the take-off and landing sites for firefighter drones. A well-known one of those is the study by Heo (2020), conducted to resolve the challenges of the use of firefighter drones in urban areas in Republic of Korea due to the high population density and high-rise buildings. In the study, seven necessary conditions (i.e., accessibility, visibility, GNSS reception, signal interference and cancellation, rapidity, take-off site reservation, and the presence of obstacles in the vicinity) and six sufficient conditions (address of the site, high-tension wires, distance from the base station or transmission tower, passage of people, relative height of the building, factors of sensor problems, and the ease of drone retrieval upon accident) were set and based on these conditions. Take-off sites were selected on ground surfaces within the administrative district of the fire department. Additionally, the time is taken for the operation was comparatively analyzed according to whether a take-off site had been reserved [22].
As such, in selecting take-off sites on ground surfaces, various problems may arise, including the difficulty of ensuring safety due to traffic control for drone operation with respect to vehicles. The selection of take-off sites on open surfaces in this way also entails vulnerability in managerial perspectives so that a case may arise in an actual disaster incidence where the landing at the selected site is impossible. Thus, this study focuses on flat-roof buildings in lieu of ground surfaces with various potential problems while applying a geographic information system (GIS)-based multi-criteria decision-making (MCDM) method.
An MCDM method is characterized by the presence of conflicting factors across the evaluation criteria without the standardization of criteria for the alternatives under evaluation. It is an approach to identify suitable alternatives among the suggested contradictory evaluation criteria through decision-making. In order to do so, a matrix is composed to compare a criterion given its weight against other criteria in terms of the level of importance based on the opinion of the decision maker [32]. Since the 1950s, MCDM methods have become an essential analysis tool that aids the decision-maker [33,34,35,36].
The convergence of the multi-criteria approach and GIS-based models has received much interest from urban planners since the 1990s [35,37]. As an analytic tool of spatial visualization that allows decision makers to collect data and store, manage, visualize, and analyze a variety of geographical information [37], the GIS ensures efficient and accurate utilization of diverse data. Multiple aspects, including environmental, economic, and social factors, are considered so that the GIS can serve as a tool to support efficient decision-making [38]. Hence, a GIS-based MCDM analysis can aid in obtaining suitable information for decision-making by combining and converting value judgments to reflect the preferences of the decision-maker and geographical data [39]. With such advantages, GIS-based MCDM analyses have been applied in various decision-making cases, such as the selection of optimal sites in different fields, from health care to distribution [40,41,42].
To specify the importance of each criterion, the weights of all criteria should be determined. Two methods are commonly used to estimate the weight of each criterion: the rank-order weights method (e.g., the analytic hierarchy process (AHP), analytic network process (ANP), and pairwise comparison) and the equal-weights method [43,44].
The AHP is a technique with structured analyses for complex decisions based on mathematics and psychology. It is a decision-making method that captures the raters’ knowledge, experience, and intuition through paired comparisons across the factors constituting hierarchical structures of decision-making [45]. Meanwhile, the ANP is a more generalized form than the AHP and is used in MCDM analyses to take into account the mutual dependency of the included criteria. The equal-weights method was introduced to produce outstanding results as with the optimal weighting methods by Dawes and Corrian in 1974 [44], and since then, it has been popularized and applied in numerous decision-making problems. It is a method in which every criterion holds an equal level of importance. However, there is a need for minimum knowledge and inputs on priority by the decision maker [44]. To our knowledge, only a few studies have investigated the selection of take-off and landing sites for the use of firefighter drones in urban areas. Thus, we adopt the equal-weights method in this study, owing to its advantages of requiring minimum knowledge and inputs for weight calculation toward the selection of take-off and landing sites for firefighter drones in urban areas.
3. Materials and Methods
3.1. Flight Plan of Firefighter Drones
In this study, for the drone operation in an environment that involves an urban area with a complex mixture of various obstacles, the firefighters dispatched upon receipt of a report of an accident moved to the take-off and landing site selected in advance. Operated the firefighter drones to the preset height, then moved to the incident location instead of the previous way of selecting the take-off and landing site at the incident location to operate the firefighter drones. We did not conduct flights in prohibited regions and beyond visual line-of-sight environments. In addition, this study established a flight path plan for a drone to a fire building at an altitude higher than the maximum height building between flight paths. Accordingly, the drone’s flight path between buildings was not considered. The total task performance time starting from receiving the report at the fire department to the arrival at the scene of the accident and task performance, was set as 30 min. The flight plan of firefighter drones is illustrated in Figure 1.
A: Time of transfer to the selected building: 3 min,
B: Time of transfer to the building roof and the time of drone inspection, etc.: 1 min,
C: Drone ascent from the take-off and landing site to the set height: 1 min,
D: Time taken between the take-off and landing site and the incident location: 2 min,
E: Drone descent to the set height after arrival at the incident location: 1 min,
F: Time of task performance: 18 min,
G: Drone ascent to the set height at the incident location: 1 min,
H: Time taken to the take-off and landing site: 2 min,
I: Drone descent to the take-off and landing site after arrival at the respective air space: 1 min
3.2. Flow Chart of Analysis
As shown in Figure 2, in this study, we selected 7 criteria, based on which the GIS-based MCDM method was applied to identify suitable sites. The equal-weights method was used to estimate the weight of each criterion. The layer of each criterion was summed up, considering the constraint criteria, such as roof instead of flat roof and fire-vulnerable buildings. The data of buildings that satisfy all seven criteria were extracted, and the buildings were grouped based on their geographical location. Through network and central feature analyses, the grouped buildings and the distance from the fire department were analyzed. Then, the building located at the center of the grouped buildings was selected. The data of buildings with a past fire incidence in the target area were used in the validation.
3.3. Multi-Criteria Selection
Table 1 lists the seven criteria used in this study for the selection of the take-off and landing sites for firefighter drones. The rationale for setting these seven criteria is as follows.
- Height of the building
The time is taken to reach the building roof (1 min), the speed of firefighters climbing the stairs, and the mean number of floors of buildings in Republic of Korea was used to set the building height and floor number. In this study, the time of firefighters moving to the building roof was set to 30 s, and the time of drone inspection was set to 30 s as well: 1 min in total. Shin & Park (2020) reported that the mean speed of Korean firefighters without gear climbing the stairs of a 30-story building (mean vertical moving speed) was 0.24 m/s [18]. According to Iwona Cłapa et al. (2015), the mean speed for climbing the stairs in a 5-story building was 1.02 m/s for five firefighters in a full uniform composed of special clothing, a belt, and a helmet and equipped with breathing apparatuses, demolition tools, torches, hoses, nozzles, and a rescue rope [46]. Thus, the mean speed for climbing the stairs (mean vertical moving speed) in this study was set to 1.02 m/s, and the height of the building was set to ≤30 m.
- 2.
- Number of floors
According to the 2021 Statistics on Buildings of the Ministry of Land, Infrastructure, and Transport Statistics System, the percentage of 1-story buildings in Republic of Korea is 61% (4,463,261 sites), and that of 2- to 4-story buildings is 33.2% (2,426,975 sites), accounting for 94.2% of total buildings. In the GNSS, the multipath effect is one of the main causes of reduced location accuracy due to high-rise buildings in urban areas with a concentration of buildings [47,48,49]. Thus, considering the potential multipath effect in low-rise buildings, and in reference to the Safety on Building Sites for buildings with 5 or more floors, 4- to 5-story buildings were determined to be suitable.
- 3.
- Shape of the roof
Flat-roof buildings provide adequate area to accommodate the infrastructure for drones, and the flat and horizontal roof structure without surrounding obstacles ensures the safety of drone operation. Thus, flat-roof buildings were determined to be suitable for subsequent analyses in this study.
- 4.
- Area of the roof
Based on the information on drone specifications provided by the manufacturers, after excluding 13 drones with unknown specifications from the total of 159 drones, the width and depth of the remaining 146 firefighter drones for missions in firefighting scenes in Republic of Korea were the highest at 1990 mm × 1990 mm for the firefighter drones manufactured by a company located in Republic of Korea. The number of drones per size was n = 43 for 350 mm × 250 mm, n = 35 for 450 mm × 450 mm, n = 21 for 300 mm × 300 mm, and n = 20 for 900 mm × 900 mm. All drones used by fire departments in Republic of Korea were rotorcraft multicopters that did not pose constraints in take-off or landing or necessitate an independent infrastructure. Thus, this study determined that 32 m2 (4 m × 8 m) of the area was suitable for building roofs, considering the size of firefighter drones in Republic of Korea and the minimum safety distance to identify nearby obstacles.
- 5.
- Uses of the building
In Republic of Korea, the Building Act stipulates that the entrance to the roof of a building with a rooftop or heliport should have no obstacles to its use upon evacuation. Nonetheless, there is no regulation prohibiting the locking of any other doors installed on building roofs. Hence, a considerable number of apartment or common building roof doors are locked for security, privacy protection, or safety issues, as the locking of these roof doors does not violate the regulation on the locking of evacuation facilities. For such private buildings, it is difficult to request cooperation upon firefighting missions. In the group of facilities for residential and business purposes, residential buildings such as detached houses and multi-family housing facilities were determined to be not suitable. In addition, buildings with a high risk of fire, such as factories, warehouses, and hazardous substance storage and treatment facilities, were excluded as potential fire incidences could inflict substantial damage to surrounding areas due to explosion and release of poisonous gas. Furthermore, priority was given to public (government administrative) buildings, such as government offices and public institutions, that would offer ready cooperation regarding the mission, maintenance, and management.
- 6.
- Floating population
To consider the floating population of the target area, in this study, the respective data at LG U+, one of the three major mobile communication businesses in Republic of Korea, was used. The floating population data comprised the estimations of the Call Detail Record Data of all users. For such data, children aged below 5 years and older adults aged 85 years or above were set as individuals without a mobile phone. In addition, the communication data at each station were used to exclude office workers and residents based on whether the time at a particular place at a specific time range accounted for 60% of the total time (approximately 5 h and 30 min) [50]. The floating population data collected from each station revealed the coordinates in 25-m intervals and the information on pedestrians and vehicle users at each time range (age and gender). Thus, the buildings in areas with high floating populations were deemed unsuitable due to the high volume of traffic and number of pedestrians. To our knowledge, there is no existing evidence to quantify the high and low levels of floating populations. As each area exhibits a different level of floating population, the floating population point DB with 25-m intervals was converted to a feature DB with 50 m × 50 m grids. The total number of generated grids in the target area was 1856, of which the top 185 sites with high floating populations on average as measured for a year (January 2021–December 2021) were deemed unsuitable as take-off and landing sites for firefighter drones.
- 7.
- Distance from the fire department (within an administrative district)
A delay in the time of dispatch of fire engines to the fire incidence scene would escalate the scale of the fire. In Republic of Korea, for a fire incident at a building, it is determined that the time from the recognition of fire through reporting the accident and the time the fire engine leaves the garage to the time of arrival at the scene should be 5 min or less to ensure the protection of the building against fire [51]. Thus, considering the preparation time for drone inspection and other tasks after the arrival at the building with a reserved take-off and landing site as well as the take-off time, the maximum time between the fire department and the take-off and landing site was set as 2 min in this study. The vehicle speed was set to 39.76 km/h, the average speed on the main roads in the target area, following 2010 road speed survey data by Daegu Gyeongbuk Institute. Thus, the buildings within a 1.33 km distance from the fire department were determined to be suitable as candidate take-off and landing sites for firefighter drones.
4. Case Study and Results
4.1. Overview of Research Area
Daegu metropolitan city (Daegu-si) is divided into eight administrative districts with approximately 884 km2 of total area. As of 2020, the total number of inhabitants was 2.24 million, with a population density of approximately 2533 persons/km2. The Building Registry from the Ministry of Land, Infrastructure, and Transport reveals that the total number of buildings in Daegu-si, as of December 2021, was 235,969, excluding the buildings with missing data on the number of building floors. The target area in this study was set as Seo-gu in Daegu-si. Seo-gu has the second-highest number of buildings per unit area. Compared to Jung-gu, with the highest number of buildings per unit area, Seo-gu has a complex mixture of buildings with a varying number of floors. According to fire incidences reported in Daegu-si from 2017 to 2020, the number of fire incidents in Seo-gu was 462, close to the average. Table 2 shows the current status of buildings in Daegu-si and Figure 3 shows the current status of the study site.
The building attributes are critical factors in this study. Thus, the building data were constructed based on the Building Registry (a vector format DB) provided by the Ministry of Land, Infrastructure, and Transport.
Building Registry (a vector format DB) provided by the Ministry of Land has 28 types of attribute information, such as the number of basement and ground floors of a building, building area, total floor area of a building, site area, height, structure of a building, and use of the building. Complementation was conducted using the open API of Building Ledger for any inadequate attribute data, such as roof shape and building structural materials. A Building Ledger is a document where the current statuses of buildings and respective lands are recorded so that the data may be used in checking the building ownership, uses, maintenance, and management or in developing the building construction policies. Hence, the data provided by a Building Ledger include the lot number address and road address, the main building and annex, the area of land and of building, the building-to-land ratio and floor area ratio, the building structure and purpose, the roof structure, as well as the number of parked cars. For complementation of the Building Registry, the building data from the open API of the Building Ledger were incorporated based on the parcel number (PNU) code, a code used for the management of buildings in Republic of Korea alongside the unique feature identifier (UFID) code assigned to each district nationwide in preparation for computerization according to the Cadastral Act [52].
The UFID code is a code given to geographical features defined in the basic geographical information for systematic management and effective search and use of those features, as well as for liaison with other databases or references across the features. Hence, where the UFID may vary, but the PNU may be identical for such buildings as the apartments of identical lot numbers, a problem might arise. In this study, however, the attribute data were integrated based on the PNU code, as the UFID code was missing in the open API of the Building Ledger used for complementation of the building attribute data. Excluding the buildings without PNU code from the 30,880 sites of buildings in the target area, the buildings at 26,334 sites (85.27%) were analyzed in this study. Figure 4 shows the current status of buildings in the study site and the target buildings.
4.2. GIS-Based Multi-Criteria Model
The GIS analysis was used for selecting the take-off and landing sites for firefighter drones. The ArcGIS Desktop (ArcMap 10.8) of Esri was used to perform the analysis. Each criterion was applied to evaluate the suitability of a given building as a candidate for a take-off and landing site. The criteria reflecting the characteristics of the target area were as follows.
- 8.
- Height of the building
The height of the building in the target area ranged between 1 m and 63.70 m. For buildings with aboveground floors but without the data of height (8083 sites) or those of 2.5 m elevation (with the number of floors recorded as n = 3, but the height of the building recorded as 1.1 m, 0.2 m; 9 sites), complementation was conducted in reference to previous studies. According to Jeong et al. (2020), non-residential buildings at 435 sites showed 4 m elevation on average [53]. Thus, the data in this study was complemented as follows: Number of floors 4 m. The current status of the height of the building in the target area is shown in Figure 5a.
- 9.
- Number of floors
The number of floors of the buildings in the target area ranged between 1 to 3 floors at 23,298 sites out of 26,334 sites (88.48%) and 4 to 5 floors at 2844 sites (12.21%). The buildings at 192 sites (0.73%) had six or more floors. The current status of the number of floors of the buildings in the target area is shown in Figure 5b.
- 10.
- Shape of the roof
Regarding the shape of the roof of the buildings in the target area, they were classified into four types: concrete (3274 sites), tile (590 sites), others (312 sites), and slab (166 sites). The slab, tile, and other types were excluded because they pose difficulties to the take-off of drones and reduce accessibility due to their slope. Conversely, concrete buildings offered flat roofs and were deemed suitable. For the 21,992 sites with missing data, the attribute data were complemented by defining the shape of the roof using the map service at a portal site. The current status of the roof shape of buildings in the target area is shown in Figure 5c.
- 11.
- Area of the roof
The buildings with the flat roof were targeted in this study. Thus, it was presumed that the building roof had no obstacles. The Building Registry and Building Ledger used in this study did not contain data on the area of the roof; thus, the building area was used to estimate the roof area. The building area is the area of the building in the horizontal projection. For this, the basis is the floor area of the first floor of the building as the largest area, and a problem arises if the roof is narrower than other floors. Thus, the roof area in this study was presumed to be 80% of the building area. Hence, 90.78% of buildings (23,906 sites) were determined to be suitable. The current status of the area of the roof at 32 m2 or above for the buildings in the target area is shown in Figure 5d.
- 12.
- Uses of the building
Analyzing the uses of buildings in the target area showed that, among the buildings at 26,334 sites, the residential buildings (detached or multi-family houses) at 15,480 sites were not suitable. The buildings at 5707 sites, of which the uses were unknown, and those with a high risk of fire (warehouses, factories, etc.) at 1905 sites, were excluded. The current status of the uses of the buildings in the target area is shown in Figure 5e.
- 13.
- Floating population
For the analysis of the floating population, the total number of 50 m × 50 m grids generated for the target area was 1856. From January 2021 to December 2021, the average floating population at 1856 sites was 633.69, the average for the top 10% (185 sites) was 1999.84, and for the bottom 90% (1671 sites), it was 482.44. Additionally, there were 20,904 sites (79.38%) with buildings in the bottom 90%, as shown in Figure 5f.
- 14.
- Distance from the fire department
In order to identify the buildings within a 1.33 km distance from the fire department, the service area was analyzed. The fire departments in the target area included one 119 rescue squad and four 119 safety centers. The Seobu 119 Rescue Squad and Pyeongni 119 Safety Center were at identical locations, and among the 26,334 sites, 20,595 sites (78.21%) had a building within a 1.33 km distance from the fire department. Figure 5g shows the current status of the fire department locations and the service area as well as the buildings within a 1.33 km distance.
In Figure 5a–g, Value 1 (Green Color) indicates the fit of the building to the specified criteria as a take-off and landing site for firefighter drones, whereas Value 0 (Red Color) indicates the lack of fit. The buildings without flat roofs and those with a high risk of fire were excluded based on the constraint criteria (Black Color). As shown in Figure 5h, the sum of weights for the layers of each of the seven criteria ranged between two and seven. The buildings at 318 sites (1.21%) were shown to have a sum of seven. However, setting all 318 sites as candidates could cause confusion upon the dispatch of firefighters in an emergency case. Thus, the buildings in proximity were grouped based on the PNU with the information on the geographical location. Through the closest facility of the network analysis in the ArcGIS Desktop, fire departments close to the grouped buildings were analyzed, as shown in Figure 6. Even for grouped buildings, the locations of nearby fire departments varied. Hence, considering the factors of grouped buildings and those of nearby fire departments, and using the central feature tool in ArcGIS Desktop, the building located at the center was selected as the candidate take-off and landing site for firefighter drones. Figure 7 shows the locations of such candidate buildings, the details of which are summarized in Table 3.
Among the candidate buildings at 318 sites, 12 candidate take-off and landing sites for firefighter drones were analyzed in consideration of the PNU-based grouping of buildings and the distance from fire departments. Candidate 3 was excluded as it was located at an identical site as the fire department. Hence, a total of 11 take-off and landing sites for firefighter drones were selected.
4.3. Validation
For the validation of the selection, the drone coverage distance was determined based on previous studies, such as those on AED-transport drones, to set the distance range for firefighter drones. In the study by Claesson (2017), 18 measurements were taken for the arrival time of emergency medical services (EMS) and medical drones per distance, finding that approximately a time of 5 min and 18 s was required for arrival at the mean distance of 3215 m at the speed of 50 km/h [4]. In another study, the distance and flight speed of drones for medical purposes were set to 10 and 70 km/h [3]. In Pulver (2018), to measure the time taken for the delivery of AED to the patient, the service range was set to 1609 m for the distance traveled per min, considering the maximum drone speed of 60 mph [54]. Based on the drone specification provided by the manufacturers, Heo (2020) set the operational range to 1.1 km, considering the surrounding environment (signal transmission, etc.) [22] in urban areas, as well as the average speed of 59.03 km/h and the distance, traveled for 2 min at 1966 m in the standard flight mode of the investigated 146 firefighter drones. In the target area, there has been a total of 462 fire incidences between 2017 and 2020. The current status of buildings with a past fire incidence is shown in Figure 8.
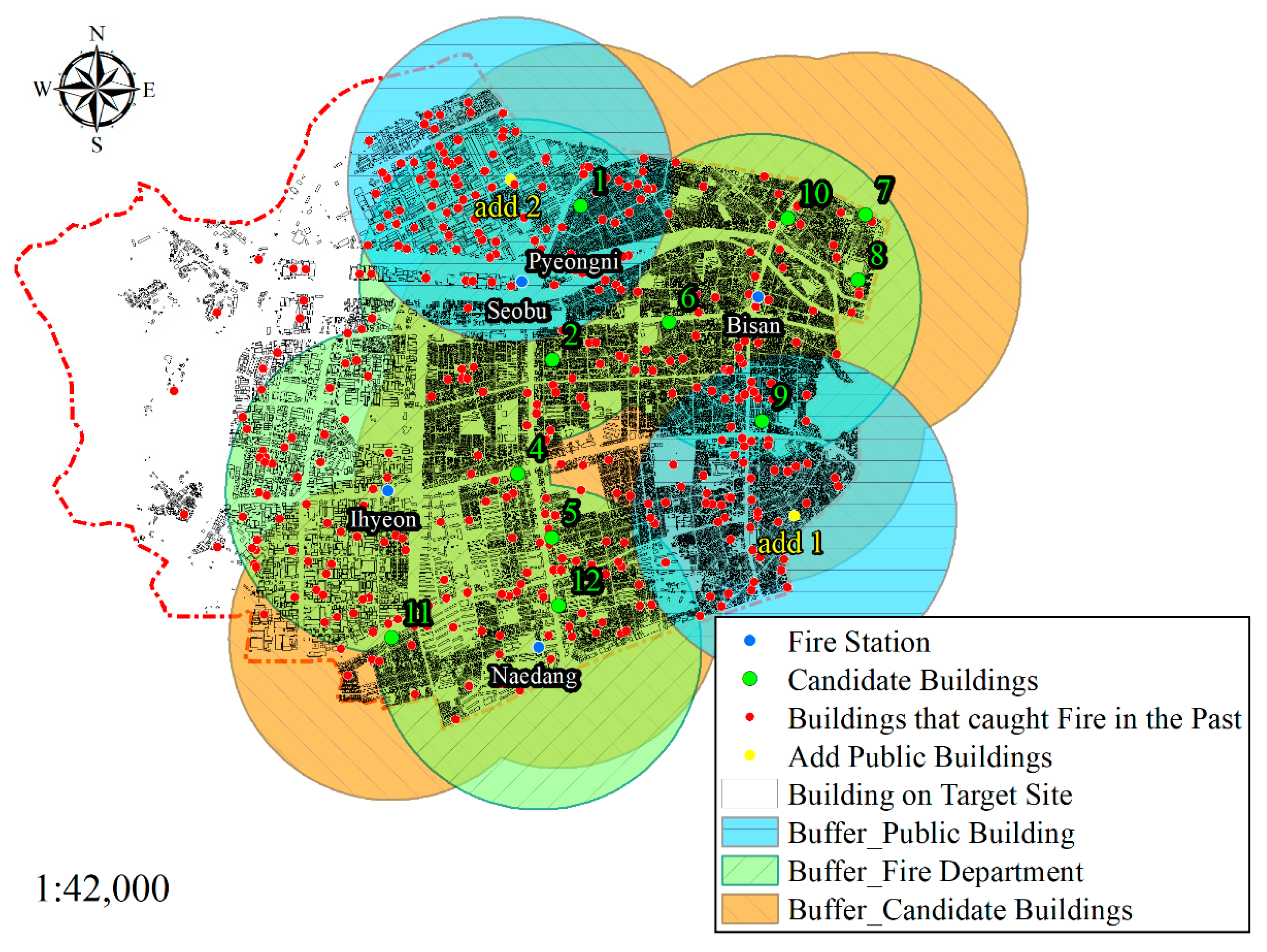
Based on the data from past fire incidences, the scope of fire responses using firefighter drones was determined, as shown in Figure 9. Using the buffer tool in the ArcGIS Desktop, the distance range of 1.1 km for firefighter drones was buffered based on the fire departments and the candidate buildings of take-off and landing sites. In the case of firefighter drones sent from the fire department, the rate of response was 80% (370 sites) of buildings with a past fire incidence, while for responses at the candidate buildings of take-off and landing sites, the rate was 81.39% (376 sites), indicating an overall rate of fire responses of 92% (425 sites) for fire departments and candidate buildings of take-off and landing sites. On the west side of the target area, a vulnerability was detected for fire responses using firefighter drones. The cause may be the industrial complex located in this part of the region. Among the buildings at 1449 sites in the complex, those at 1448 sites did not satisfy the criteria of the shape of the roof, and those at 1300 sites did not satisfy the criteria of the uses of the building (e.g., fire-vulnerable buildings). Further,1448 sites out of 1449 sites did not satisfy both criteria and thus could not be identified as candidate buildings. In order to make complementation for this region outside the coverage of firefighter drones, the standards were relaxed to select two more buildings, the government office and public buildings, as take-off and landing sites for firefighter drones. The standards were relaxed by selecting two public buildings that are easier to request cooperation for firefighting than private buildings.
Figure 10 shows the scope of fire responses after performing the complementation via the relaxation of standards. The added candidate buildings allowed the response to 211 sites of buildings with a fire incident. The overall rate of fire response in the target area was 95% for buildings at 442 sites.
5. Discussion and Conclusions
For more effective utilization of drones, an environment free of obstacles, such as a wide-open space, is recommended for the flight. In urban areas with a complex mixture of various obstacles, however, the flight of drones is a challenge. Specifically, in Republic of Korea, firefighter drones have been used in various scenes to which firefighters are dispatched; however, the lack of take-off site reservation has hindered the utilization of firefighting drones. Thus, a GIS-based multi-criteria model is proposed in this study for the selection of take-off and landing sites for firefighter drones. The model is based on seven criteria, and its application led to 95% response on buildings with a past fire incidence, thus verifying the effectiveness of the suggested methodology. The introduced multi-criteria model based on spatial information is both simple and effective in enabling simultaneous analyses of multiple criteria. This offers valuable insights for decision-makers. Thereby, this study contributes to improving the operational firefighting strategies in fire disaster cases.
The current study has the following limitations. As drones utilize diverse advanced technologies to involve various sensors, these sensors are sensitive to errors and variations. Specifically, in a city where a variety of obstacles are found in a complex environment, there could be myriads of factors with a deteriorating effect on drones, which, however, could not be all considered in this study. The flight plan was established in consideration of the current state of Korean buildings, where the proportion of buildings with four or less floors is 94.2%. In this study, a flight plan was established for drone take-off (height not affected by buildings), movement, and descent near fire buildings, and accordingly, flights between buildings were not considered. This study was conducted based on seven criteria that were judged to have a high impact on location selection for building take-off sites, excluding factors that affect flight planning. However, problems such as GNSS errors due to multipath studied by Ragothaman (2019) and Yang (2021) may occur when flying in areas with high-rise buildings. When considering this issue, the flight plan should be supplemented by flying between buildings or bypassing them [55,56,57].
In addition, the weight estimation in this study relied on the equal-weights method, which allows a high-quality analysis with minimum knowledge and inputs; however, there is a limitation of all criteria being equally weighted. In future works, the criteria should be complemented with expert consultation, while the rank-order weighting methods, such as AHP, ANP, and pairwise comparisons, should be adopted for the weight estimation. Moreover, only public data were used in this study. Approximately 15% of buildings were excluded due to missing data caused by inadequate data construction and management. In the case of vector format data, individual attribute data could still vary after the data construction for attributes of an identical object. To substitute for missing attributes, such as the shape and structure of the roof, public data constructed for other purposes were used for analyzing the buildings in the target area based on the PNU. While the minimum unit of building objects in Republic of Korea is UFID, the PNU for land objects was used to complement the building attributes. As the PNU is for land objects, a problem arises where the UFID may vary, but the PNU may be identical. Thus, future research should perform complement missing data using the UFID method.
Nevertheless, our method offers significant practical implications. The concept of spatial data infrastructure (SDI) refers to the infrastructure to promote efficient use of spatial data as well as systematic and physical structures. It is thus a data platform for the exchange and sharing of spatial data across stakeholders [58,59,60]. In many countries, SDIs at national, state, and regional levels are developed for efficient management and utilization of spatial data [33,60]. As such, SDIs are constructed as the database for utilizing GIS in numerous countries [61]. In this study, therefore, public data from Republic of Korea, as a form of SDI, was used to construct and apply the dataset in analyzing the candidate buildings for selecting the take-off and landing sites for firefighter drones, and the methodology is anticipated to be applicable to various other city environments.
Recently, drones have been increasingly and effectively utilized in various disaster situations, such as floods and earthquakes [62,63]. The methodology proposed in this study, the GIS-based multi-criteria model can be applied in various disaster cases in urban areas with a prerequisite understanding of the criteria of the operator and the characteristics of the target area and disaster type.
Author Contributions
Conceptualization, M.-S.K., W.-H.H., Y.-H.L. and S.-C.B.; methodology, M.-S.K. and Y.-H.L.; software, M.-S.K. and Y.-H.L.; validation, Y.-H.L. and S.-C.B.; formal analysis, S.-C.B.; investigation, M.-S.K.; resources, M.-S.K.; data curation, M.-S.K.; writing—original draft preparation, M.-S.K. and S.-C.B.; writing—review and editing, M.-S.K., W.-H.H. and Y.-H.L.; visualization, M.-S.K.; supervision, Y.-H.L. and S.-C.B.; project administration, Y.-H.L.; funding acquisition, S.-C.B. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korean government (MSIT) (No. 2020R1F1A1073244).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Basso, M.; Zacarias, I.; Tussi Leite, C.E.; Wang, H.; Pignaton de Freitas, E. A Practical Deployment of a Communication Infrastructure to Support the Employment of Multiple Surveillance Drones Systems. Drones 2018, 2, 26. [Google Scholar] [CrossRef] [Green Version]
- Boutilier, J.J.; Brooks, S.C.; Janmohamed, A.; Byers, A.; Buick, J.E.; Zhan, C.; Schoellig, A.P.; Cheskes, S.; Morrison, L.J.; Chan, T.C. Optimizing a Drone Network to Deliver Automated External Defibrillators. Circulation 2017, 135, 2454–2465. [Google Scholar] [CrossRef]
- Claesson, A.; Fredman, D.; Svensson, L.; Ringh, M.; Hollenberg, J.; Nordberg, P.; Rosenqvist, M.; Djarv, T.; Österberg, S.; Lennartsson, J. Unmanned Aerial Vehicles (Drones) in Out-of-Hospital-Cardiac-Arrest. Scand. J. Trauma Resusc. Emerg. Med. 2016, 24, 124. [Google Scholar] [CrossRef] [Green Version]
- Claesson, A.; Bäckman, A.; Ringh, M.; Svensson, L.; Nordberg, P.; Djärv, T.; Hollenberg, J. Time to Delivery of an Automated External Defibrillator using a Drone for Simulated Out-of-Hospital Cardiac Arrests vs. Emergency Medical Services. JAMA 2017, 317, 2332–2334. [Google Scholar] [CrossRef]
- Ezequiel, C.A.F.; Cua, M.; Libatique, N.C.; Tangonan, G.L.; Alampay, R.; Labuguen, R.T.; Favila, C.M.; Honrado, J.L.E.; Canos, V.; Devaney, C. UAV Aerial Imaging Applications for Post-Disaster Assessment, Environmental Management and Infrastructure Development. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27 May 2014. [Google Scholar]
- Ling, G.; Draghic, N. Aerial Drones for Blood Delivery. Transfusion 2019, 59, 1608–1611. [Google Scholar] [CrossRef] [Green Version]
- Allauddin, M.S.; Kiran, G.S.; Kiran, G.R.; Srinivas, G.; Mouli, G.U.R.; Prasad, P.V. Development of a Surveillance System for Forest Fire Detection and Monitoring using Drones. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July 2019. [Google Scholar]
- Mairaj, A.; Baba, A.I.; Javaid, A.Y. Application Specific Drone Simulators: Recent Advances and Challenges. Simul. Model. Pract. Theory 2019, 94, 100–117. [Google Scholar] [CrossRef] [Green Version]
- Kornatowski, P.M.; Bhaskaran, A.; Heitz, G.M.; Mintchev, S.; Floreano, D. Last-Centimeter Personal Drone Delivery: Field Deployment and User Interaction. IEEE Robot. Autom. Lett. 2018, 3, 3813–3820. [Google Scholar] [CrossRef]
- Rosser, J.C., Jr.; Vignesh, V.; Terwilliger, B.A.; Parker, B.C. Surgical and Medical Applications of Drones: A Comprehensive Review. JSLS: J. Soc. Laparoendosc. Surg. 2018, 22, e2018.00018. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Poikonen, S.; Golden, B. The Vehicle Routing Problem with Drones: Several Worst-Case Results. Optim. Lett. 2017, 11, 679–697. [Google Scholar] [CrossRef]
- Wulfovich, S.; Rivas, H.; Matabuena, P. Drones in healthcare. In Digital Health; Rivas, H., Wac, K., Eds.; Springer: Cham, Switzeland, 2018; pp. 159–168. [Google Scholar]
- Martínez-Vásquez, A.; Rodriguez-Mata, A.; González-Hernández, I.; Salazar, S.; Montiel-Varela, A.; Lozano, R. Linear Observer for Estimating Wind Gust in UAV’S. In Proceedings of the 2015 12th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 28 October 2015. [Google Scholar]
- Deng, L.; He, Y.; Liu, Q. Research on Application of Fire Uumanned Aerial Vehicles in Emergency Rescue. In Proceedings of the 2019 9th International Conference on Fire Science and Fire Protection Engineering (ICFSFPE), Chengdu, China, 18 October 2019. [Google Scholar]
- How Firefighters Are Using Drones to Save Lives. Available online: https://www.cnbc.com/2017/08/26/skyfire-consulting-trains-firefighters-to-use-drones-to-save-lives.html (accessed on 14 June 2022).
- Khan, M.N.H.; Neustaedter, C. An Exploratory Study of the use of Drones for Assisting Firefighters during Emergency Situations. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Scotland, UK, 4 May 2019. [Google Scholar]
- Firefighter Drones—How Drones Are Being Used for Helping Fire Departments. Available online: https://dronenodes.com/firefighter-drones (accessed on 15 June 2022).
- Shin, Y.; Park, J. Analysis of the Effectiveness of Fire Drone Missions at Disaster Sites: An Empirical Approach. Fire Sci. Eng. 2020, 34, 112–119. [Google Scholar] [CrossRef]
- Kapoor, R.; Ramasamy, S.; Gardi, A.; Sabatini, R. UAV Navigation using Signals of Opportunity in Urban Environments: A Review. Energy Procedia 2017, 110, 377–383. [Google Scholar] [CrossRef]
- Lee, J.Y.; Chung, A.Y.; Shim, H.; Joe, C.; Park, S.; Kim, H. UAV Flight and Landing Guidance System for Emergency Situations. Sensors 2019, 19, 4468. [Google Scholar] [CrossRef] [Green Version]
- World Population Prospects 2022. Available online: https://population.un.org/wpp/Download/Standard/MostUsed (accessed on 14 June 2022).
- Heo, C.S. A Study on Securing Pre Take-Off Space for Efficient Fire Drone Operation in Disaster Sites. Master’s Thesis, University of Seoul, Seoul, Korea, 2020. [Google Scholar]
- Desaraju, V.R.; Michael, N.; Humenberger, M.; Brockers, R.; Weiss, S.; Nash, J.; Matthies, L. Vision-Based Landing Site Evaluation and Informed Optimal Trajectory Generation Toward Autonomous Rooftop Landing. Auton. Robot. 2015, 39, 445–463. [Google Scholar] [CrossRef]
- Castagno, J.; Ochoa, C.; Atkins, E. Comprehensive Risk-Based Planning for Small Unmanned Aircraft System Rooftop Landing. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12 June 2018. [Google Scholar]
- Duffy, J.P.; Cunliffe, A.M.; DeBell, L.; Sandbrook, C.; Wich, S.A.; Shutler, J.D.; Myers-Smith, I.H.; Varela, M.R.; Anderson, K. Location, Location, Location: Considerations when using Lightweight Drones in Challenging Environments. Remote Sens. Ecol. Conserv. 2018, 4, 7–19. [Google Scholar] [CrossRef]
- Lynskey, J.; Thar, K.; Oo, T.Z.; Hong, C.S. Facility Location Problem Approach for Distributed Drones. Symmetry 2019, 11, 118. [Google Scholar] [CrossRef] [Green Version]
- Ayhan, B.; Kwan, C.; Um, Y.; Budavari, B.; Larkin, J. Semi-Automated Emergency Landing Site Selection Approach for UAVs. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 1892–1906. [Google Scholar] [CrossRef]
- Faheem, R.M.; Aziz, S.; Khalid, A.; Bashir, M.; Yasin, A. Uav Emergency Landing Site Selection System using Machine Vision. J. Mach. Intell. 2015, 1, 13–20. [Google Scholar]
- Fitzgerald, D.L. Landing Site Selection for UAV Forced Landings Using Machine Vision. Ph.D. Thesis, Queensland University of Technology, Brisbane, Australia, 2007. [Google Scholar]
- Mejias, L.; Fitzgerald, D. A Multi-Layered Approach for Site Detection in UAS Emergency Landing Scenarios using Geometry-Based Image Segmentation. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems, Atlanta, GA, USA, 28 May 2013. [Google Scholar]
- Shavarani, S.M.; Nejad, M.G.; Rismanchian, F.; Izbirak, G. Application of Hierarchical Facility Location Problem for Optimization of a Drone Delivery System: A Case Study of Amazon Prime Air in the City of San Francisco. Int. J. Adv. Manuf. Technol. 2018, 95, 3141–3153. [Google Scholar] [CrossRef]
- Mokhtar, M.R.; Abdullah, M.P.; Hassan, M.Y.; Hussin, F. Combination of AHP-PROMETHEE and TOPSIS for Selecting the Best Demand Side Management (DSM) Options. In Proceedings of the 2015 IEEE Student Conference on Research and Development, Kuala Lumpur, Malaysia, 13 December 2015. [Google Scholar]
- Crompvoets, J.; Bregt, A.; Rajabifard, A.; Williamson, I. Assessing the Worldwide Developments of National Spatial Data Clearinghouses. Int. J. Geogr. Inf. Sci. 2004, 18, 665–689. [Google Scholar] [CrossRef]
- Fadhil, D.N. A GIS-Based Analysis for Selecting Ground Infrastructure Locations for Urban Air Mobility. Master’s Thesis, Technical University of Munich, Munich, Germany, 2018. [Google Scholar]
- Phua, M.; Minowa, M. A GIS-Based Multi-Criteria Decision Making Approach to Forest Conservation Planning at a Landscape Scale: A Case Study in the Kinabalu Area, Sabah, Malaysia. Landsc. Urban Plann. 2005, 71, 207–222. [Google Scholar] [CrossRef]
- Sumathi, V.R.; Natesan, U.; Sarkar, C. GIS-Based Approach for Optimized Siting of Municipal Solid Waste Landfill. Waste Manag. 2008, 28, 2146–2160. [Google Scholar] [CrossRef] [PubMed]
- Malczewski, J. On the use of Weighted Linear Combination Method in GIS: Common and Best Practice Approaches. Trans. GIS 2000, 4, 5–22. [Google Scholar]
- Villacreses, G.; Gaona, G.; Martínez-Gómez, J.; Jijón, D.J. Wind Farms Suitability Location using Geographical Information System (GIS), Based on Multi-Criteria Decision Making (MCDM) Methods: The Case of Continental Ecuador. Renew. Energy 2017, 109, 275–286. [Google Scholar] [CrossRef]
- Malczewski, J. GIS and Multicriteria Decision Analysis; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Dereli, M.A.; Tercan, E. Comparison of GIS-Based Surrogate Weighting Methods for Multi-Directional Landfill Site Selection in West Mediterranean Planning Region in Turkey. Environ. Dev. Sustain. 2021, 23, 3438–3457. [Google Scholar] [CrossRef]
- Halder, B.; Bandyopadhyay, J.; Banik, P. Assessment of Hospital Sites’ Suitability by Spatial Information Technologies using AHP and GIS-Based Multi-Criteria Approach of Rajpur–Sonarpur Municipality. Model. Earth Syst. Environ. 2020, 6, 2581–2596. [Google Scholar] [CrossRef]
- Vahidnia, M.H.; Alesheikh, A.A.; Alimohammadi, A. Hospital Site Selection using Fuzzy AHP and its Derivatives. J. Environ. Manag. 2009, 90, 3048–3056. [Google Scholar] [CrossRef]
- Cheng, C.; Thompson, R.G. Application of Boolean Logic and GIS for Determining Suitable Locations for Temporary Disaster Waste Management Sites. Int. J. Disaster Risk Reduct. 2016, 20, 78–92. [Google Scholar] [CrossRef]
- Wang, J.; Jing, Y.; Zhang, C.; Zhao, J. Review on Multi-Criteria Decision Analysis Aid in Sustainable Energy Decision-Making. Renew. Sustain. Energy Rev. 2009, 13, 2263–2278. [Google Scholar] [CrossRef]
- Yang, C.L.; Chuang, S.P.; Huang, R.H.; Tai, C.C. Location Selection Based on AHP/ANP Approach. In Proceedings of the 2008 IEEE International Conference on Industrial Engineering and Engineering Management, Singapore, 8 December 2008. [Google Scholar]
- Cłapa, I.; Cisek, M.; Tofiło, P.; Dziubiński, M. Firefighters Ascending and Evacuation Speeds during Counter Flow on Staircase. Saf. Sci. 2015, 78, 35–40. [Google Scholar] [CrossRef]
- Kim, D.; Youn, J.; Kim, T.; Kim, G. 3D Grid-Based Global Positioning System Satellite Signal Shadowing Range Modeling in Urban Area. Sens. Mater. 2019, 31, 3835–3848. [Google Scholar] [CrossRef]
- Lee, Y.; Park, B. Nonlinear Regression-Based GNSS Multipath Modelling in Deep Urban Area. Mathematics 2022, 10, 412. [Google Scholar] [CrossRef]
- Lee, Y.; Suh, Y.; Shibasaki, R. A Simulation System for GNSS Multipath Mitigation using Spatial Statistical Methods. Comput. Geosci. 2008, 34, 1597–1609. [Google Scholar] [CrossRef]
- Park, Y.R.; Kang, Y. Estimation of Flow Population of Seoul Walking Tour Courses using Telecommunications Data. J. Cadastre Land Inf. 2019, 49, 181–195. [Google Scholar]
- Jang, K.; Cho, S.; Cho, Y.; Son, S. Development of Fire Engine Travel Time Estimation Model for Securing Golden Time. J. Korea Inst. Intell. Transp. Syst. 2020, 19, 1–13. [Google Scholar]
- Seo, D.; Woo, H.; Kim, M.; Hong, W.; Kim, I.; Baek, S. Identification of Asbestos Slates in Buildings Based on Faster Region-Based Convolutional Neural Network (Faster R-CNN) and Drone-Based Aerial Imagery. Drones 2022, 6, 194. [Google Scholar] [CrossRef]
- Jeong, Y.; Jung, H.; Jang, H.; Yu, K. A Study on the Reference Building Based on the Building Design Trends for Non-Residential Buildings. J. Korean Sol. Energy Soc. 2014, 34, 1–11. [Google Scholar]
- Pulver, A.; Wei, R. Optimizing the Spatial Location of Medical Drones. Appl. Geogr. 2018, 90, 9–16. [Google Scholar] [CrossRef]
- Ragothaman, S.; Maaref, M.; Kassas, Z.M. Multipath-optimal UAV trajectory planning for urban UAV navigation with cellular signals. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 7 November 2019. [Google Scholar]
- Yang, Y.; Khalife, J.; Morales, J.J.; Kassas, Z.M. Uav waypoint opportunistic navigation in gnss-denied environments. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 663–678. [Google Scholar] [CrossRef]
- Wu, Y.; Low, K.H. An adaptive path replanning method for coordinated operations of drone in dynamic urban environments. IEEE Syst. J. 2020, 15, 4600–4611. [Google Scholar]
- Hendriks, P.H.; Dessers, E.; Van Hootegem, G. Reconsidering the Definition of a Spatial Data Infrastructure. Int. J. Geogr. Inf. Sci. 2012, 26, 1479–1494. [Google Scholar]
- Hjelmager, J.; Moellering, H.; Cooper, A.; Delgado, T.; Rajabifard, A.; Rapant, P.; Danko, D.; Huet, M.; Laurent, D.; Aalders, H. An Initial Formal Model for Spatial Data Infrastructures. Int. J. Geogr. Inf. Sci. 2008, 22, 1295–1309. [Google Scholar] [CrossRef]
- Rajabifard, A.; Binns, A.; Masser, I.; Williamson, I. The Role of Sub-national Government and the Private Sector in Future Spatial Data Infrastructures. Int. J. Geogr. Inf. Sci. 2006, 20, 727–741. [Google Scholar] [CrossRef] [Green Version]
- Makanga, P.; Smit, J. A Review of the Status of Spatial Data Infrastructure Implementation in Africa. S. Afr. Comput. J. 2010, 2010, 18–25. [Google Scholar] [CrossRef] [Green Version]
- Al-Naji, A.; Perera, A.G.; Mohammed, S.L.; Chahl, J. Life Signs Detector using a Drone in Disaster Zones. Remote Sens. 2019, 11, 2441. [Google Scholar] [CrossRef] [Green Version]
- Mohd Daud, S.M.S.; Mohd Yusof, M.Y.P.; Heo, C.C.; Khoo, L.S.; Singh, M.K.C.; Mahmood, M.S.; Nawawi, H. Applications of Drone in Disaster Management: A Scoping Review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Flight plan of firefighter drones.
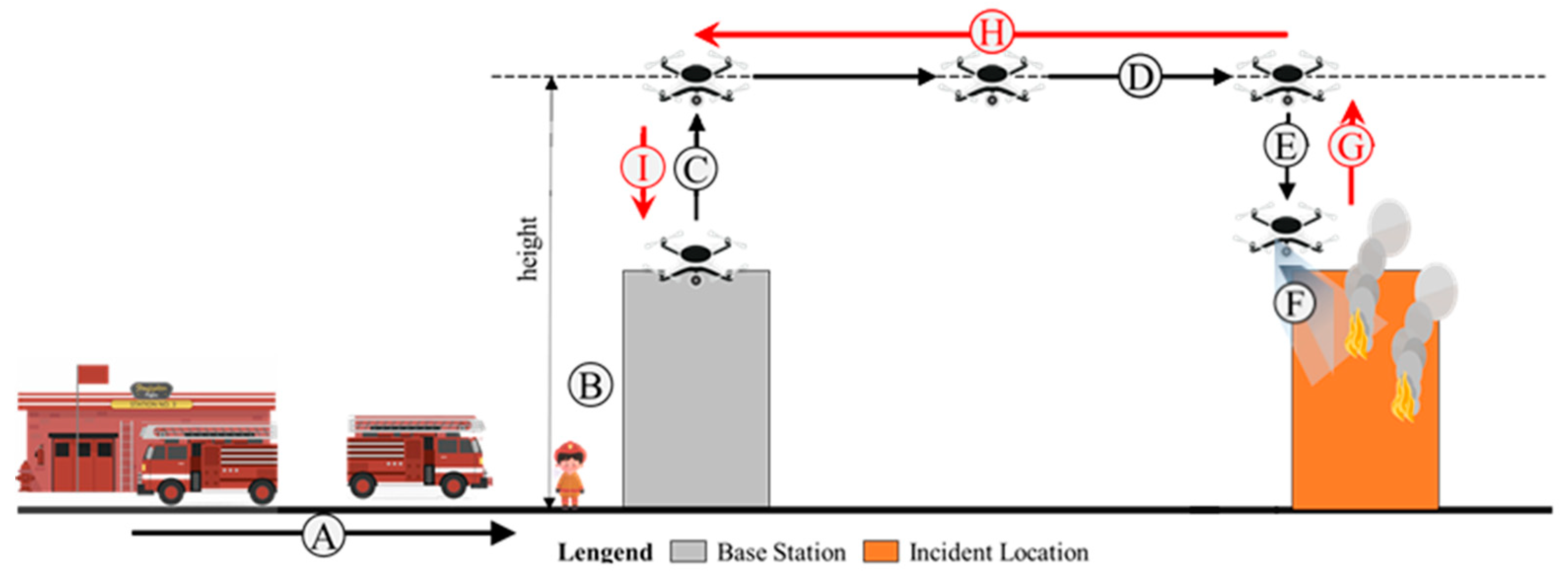
Figure 2.
Research analysis flow chart.
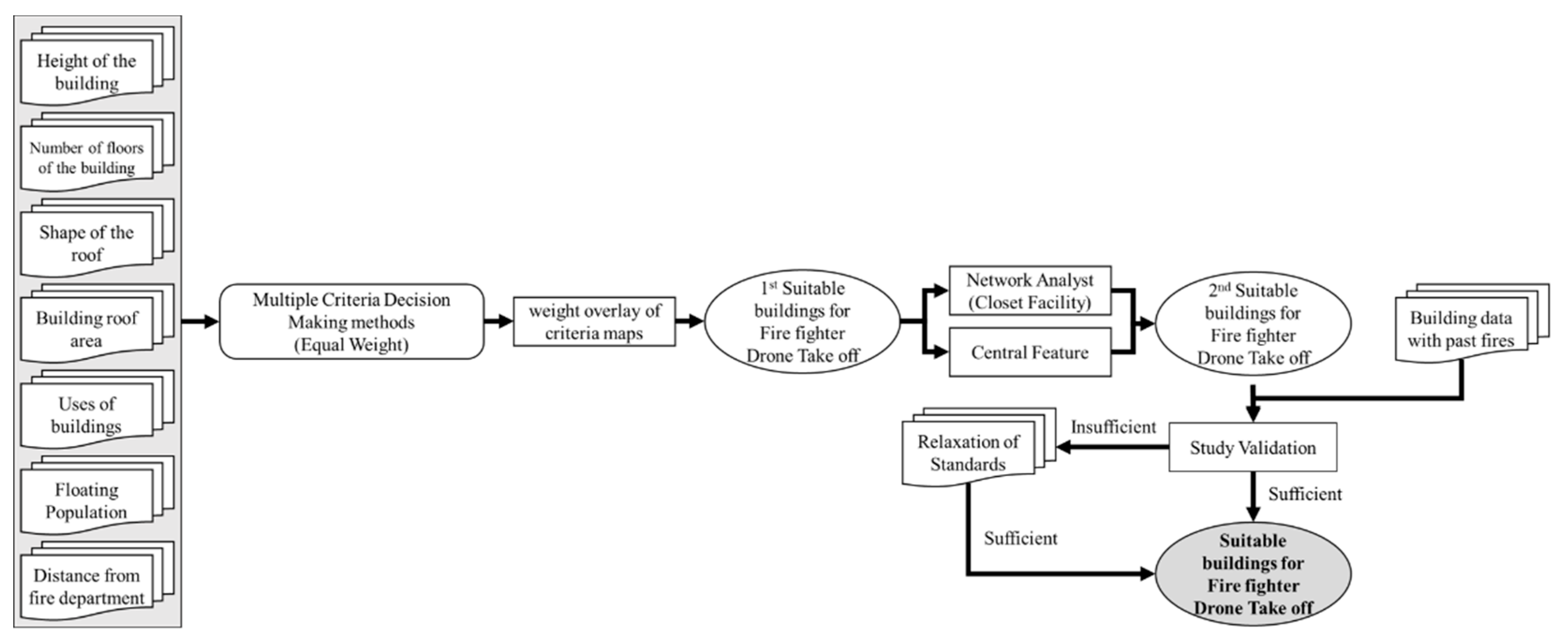
Figure 3.
Research target area.

Figure 4.
Current status of buildings in the target area and target buildings for research.
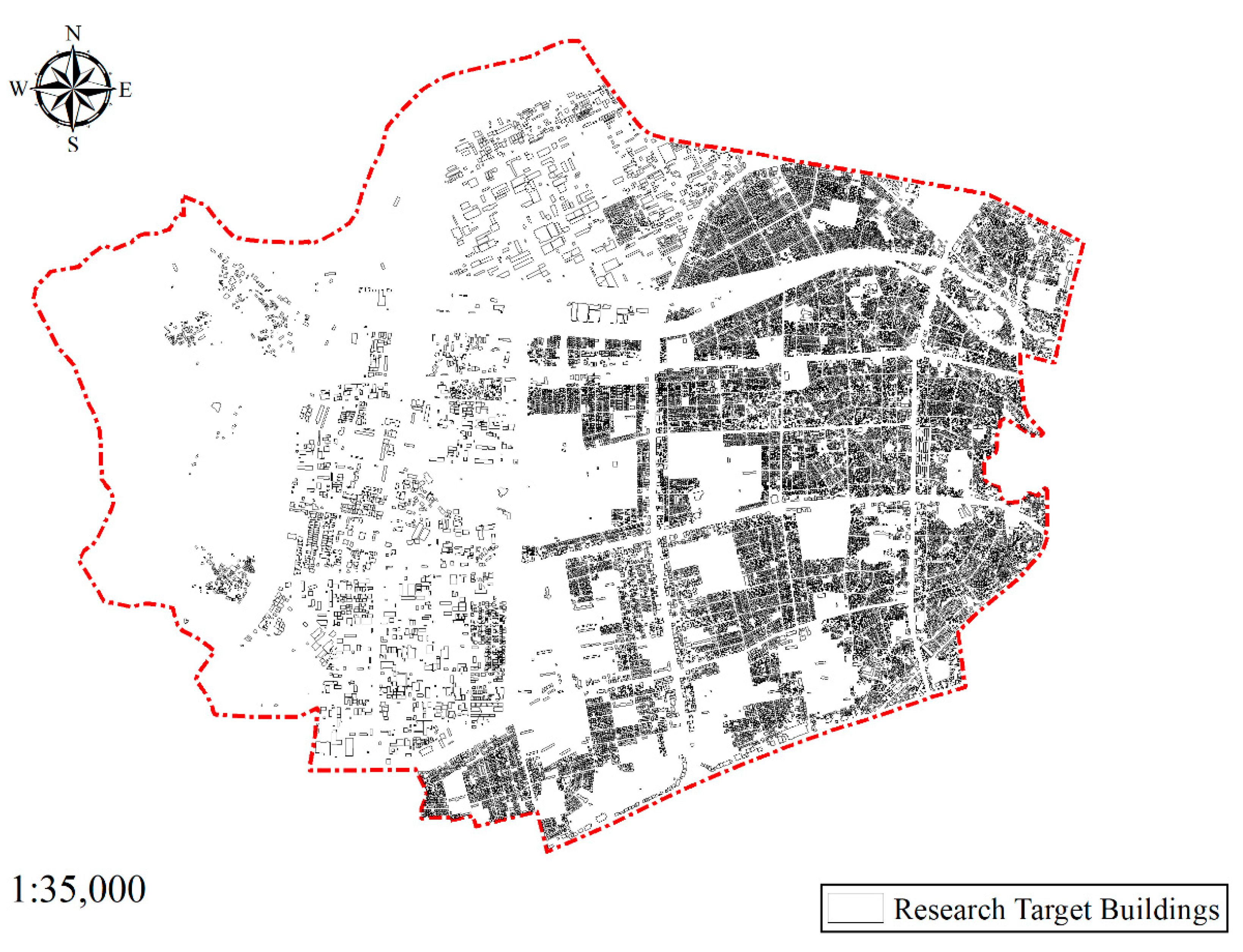
Figure 5.
Suitability of drone take-off and landing sites by each: (a) Height of the building; (b) Number of floors; (c) Shape of the roof; (d) Area of the roof; (e) Uses of the building; (f) Floating population; (g) Distance from the fire department; (h) Weight sum.
Figure 5.
Suitability of drone take-off and landing sites by each: (a) Height of the building; (b) Number of floors; (c) Shape of the roof; (d) Area of the roof; (e) Uses of the building; (f) Floating population; (g) Distance from the fire department; (h) Weight sum.

Figure 6.
The PNU-based grouping of buildings for the selection of candidates and the analysis of the distance from fire departments.
Figure 6.
The PNU-based grouping of buildings for the selection of candidates and the analysis of the distance from fire departments.
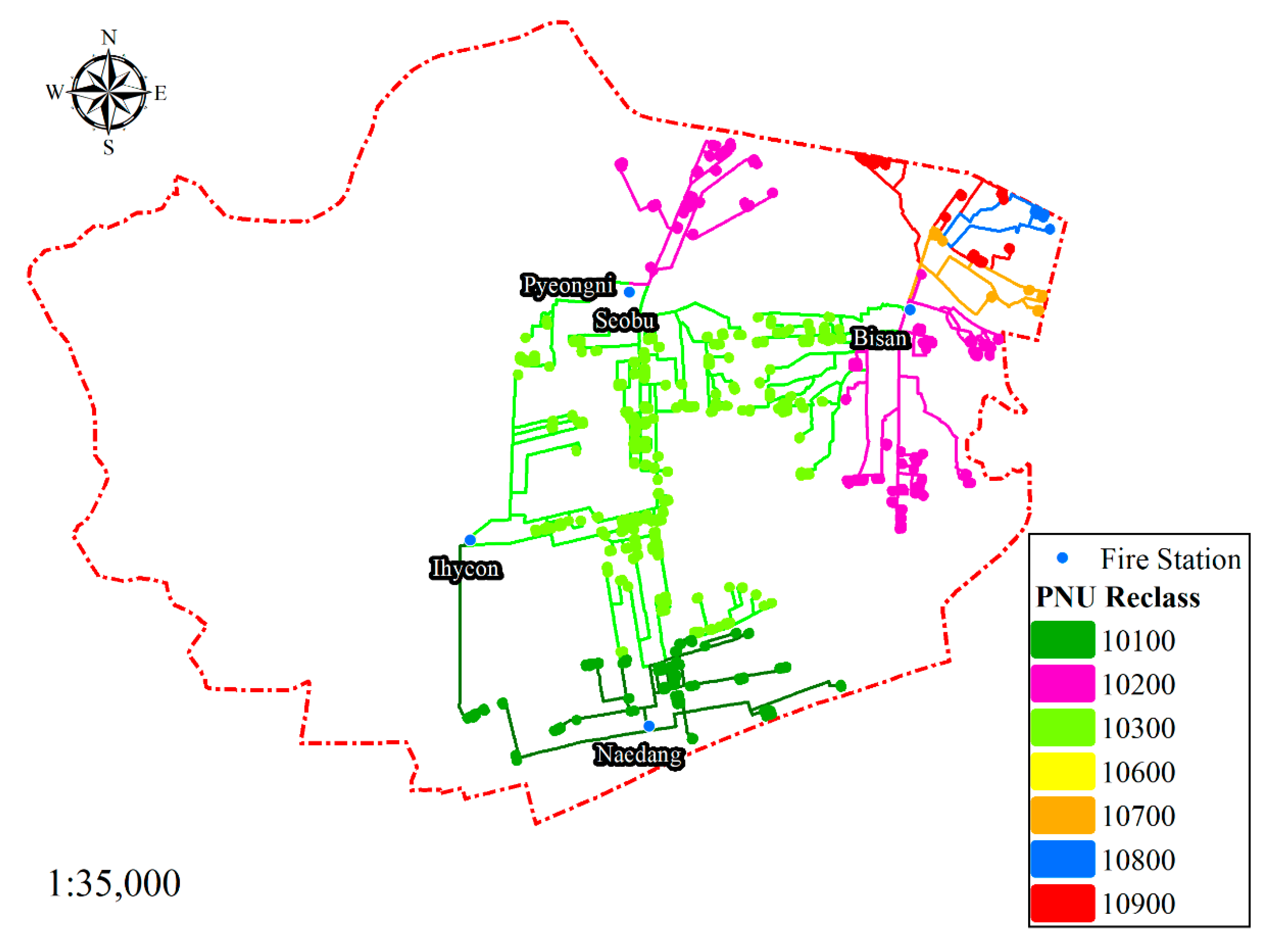
Figure 7.
Locations of the fire departments and the candidate buildings of take-off and landing sites for firefighter drones.
Figure 7.
Locations of the fire departments and the candidate buildings of take-off and landing sites for firefighter drones.
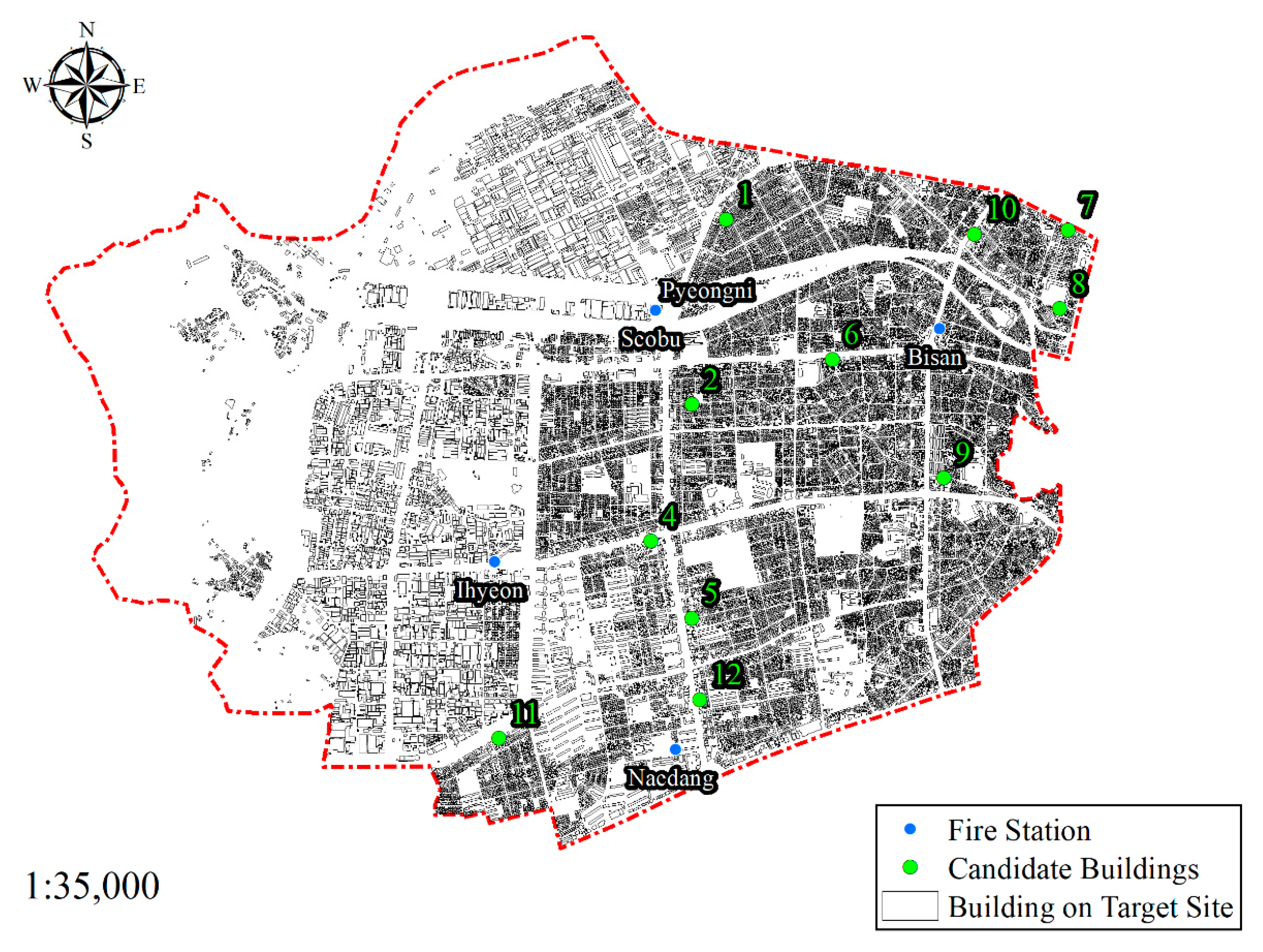
Figure 8.
Building fires that occurred in the target area in the past.
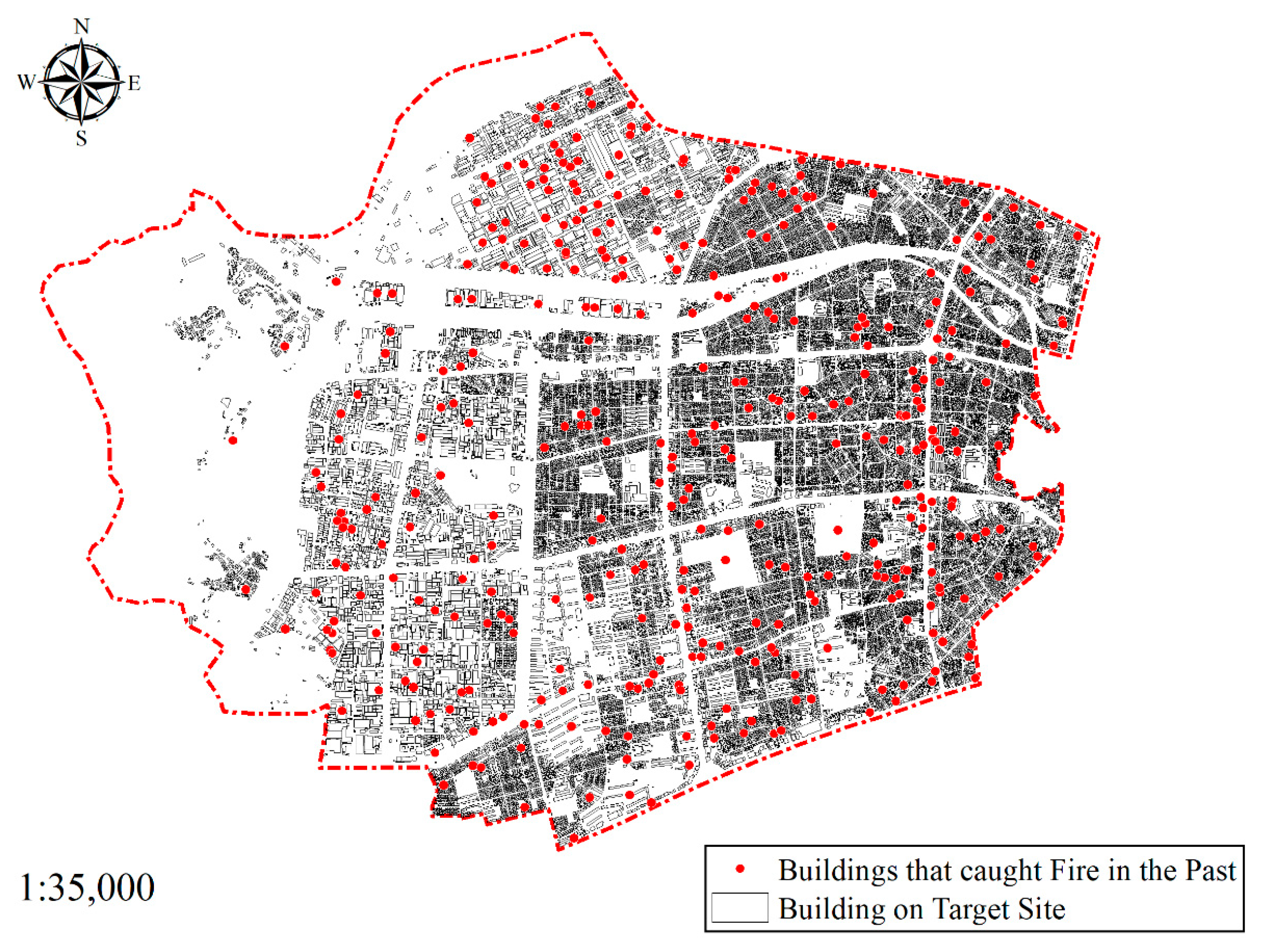
Figure 9.
The scope of fire responses.
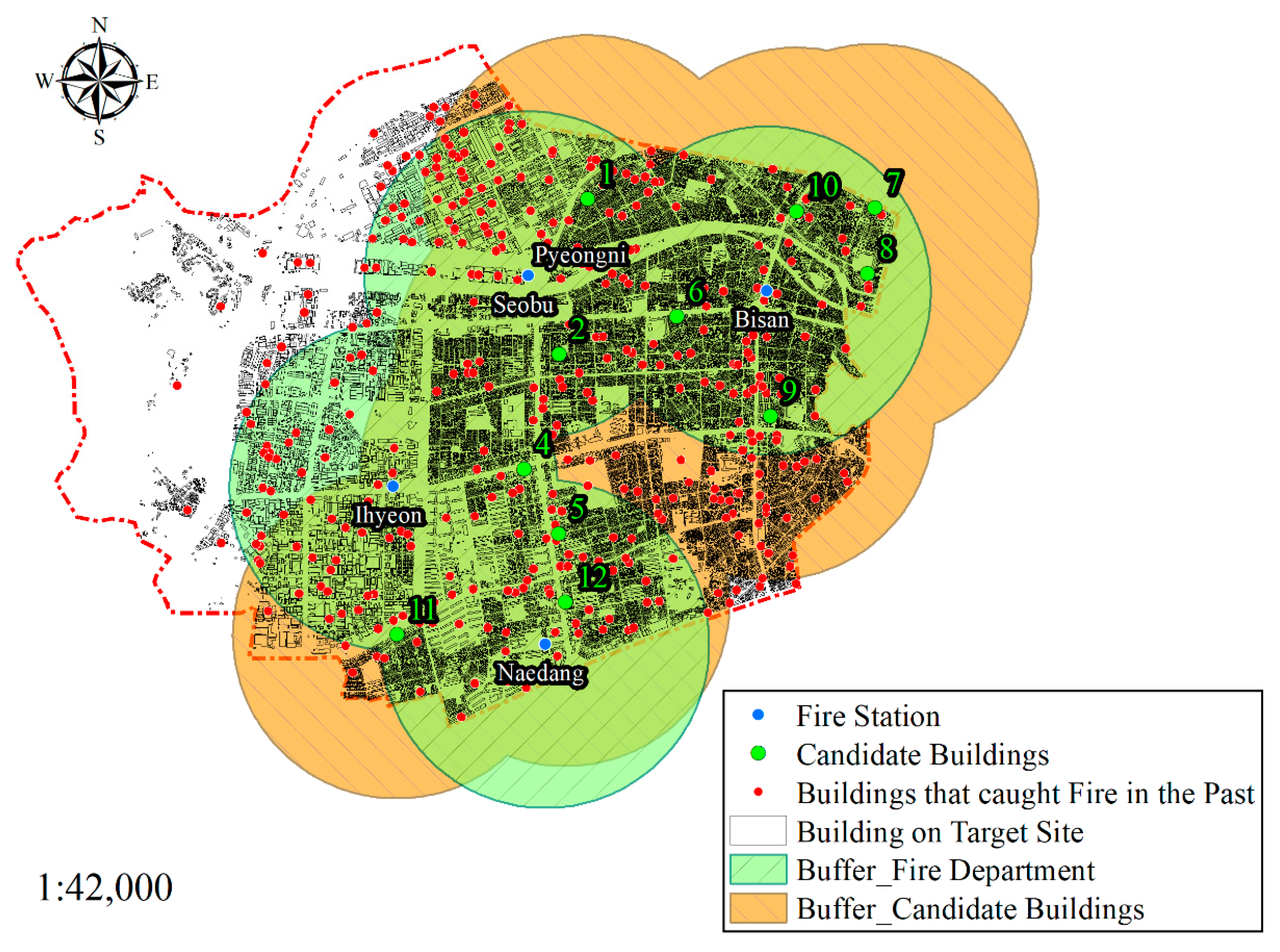
Figure 10.
The fire response scope is based on relaxed standards.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Summary of the applied criteria.
| Criteria | Value | |
|---|---|---|
| 1 | 0 | |
| Height of the building | ≤30 m | >30 m |
| Number of floors | 4 or 5 | Other number of floors |
| Shape of the roof | Flat roof | Other roof shapes (constraint criteria) |
| Area of the roof | ≥32 | <32 |
| Uses of the building | Residential buildings and fire vulnerable buildings are excluded (priority for government office buildings and public institution buildings) | Residential buildings (detached houses, multi-family housing) Fire vulnerable buildings (warehouse, factory, etc.; constraint criteria) |
| Floating population | Lower 90% of total floating population | Upper 10% of total floating population |
| Distance from the fire department (within an administrative district) | ≤1.33 km | >1.33 km |
Table 2.
Overview of Daegu-si.
| Category | Area (Unit: km2) | Number of Buildings per Unit Area (km2) | Total Number of Buildings | Number of Building Floors | Number of Fire Incidence | ||
|---|---|---|---|---|---|---|---|
| 1st–5th | 6th–15th | ≥15th | |||||
| Jung-gu | 7.06 | 2064.45 | 14,575 | 14,229 | 287 | 59 | 257 |
| Dong-gu | 182.14 | 201.04 | 36,618 | 35,889 | 598 | 131 | 504 |
| Seo-gu | 17.33 | 1781.88 | 30,880 | 30,683 | 169 | 28 | 462 |
| Nam-gu | 17.43 | 1322.38 | 23,049 | 22,804 | 210 | 35 | 258 |
| Buk-gu | 93.99 | 393.90 | 37,023 | 35,910 | 760 | 353 | 641 |
| Suseong-gu | 76.54 | 423.49 | 32,414 | 31,289 | 677 | 448 | 470 |
| Dalseo-gu | 62.34 | 513.70 | 32,024 | 30,594 | 772 | 658 | 767 |
| Dalseong-gun | 426.68 | 68.87 | 29,386 | 28,990 | 204 | 192 | 524 |
Table 3.
Overview of the candidate buildings as take-off and landing sites for firefighter drones.
| Candidate | Distance/Time from the Fire Department (Unit: m/min, Based on 39.76 km/h) | PNU Class | Near Fire Department |
|---|---|---|---|
| 1 | 693.38 m/1 min 2 s | 10200 | Seobu 119 Rescue Squad |
| 2 | 827.01 m/1 min 14 s | 10300 | Seobu 119 Rescue Squad |
| 3 | 1.13 m/1 s | 10600 | Ihyeon 119 Safety Center |
| 4 | 1051.62 m/1 min 35 s | 10300 | Ihyeon 119 Safety Center |
| 5 | 937.78 m/1 min 25 s | 10300 | Naedang 119 Safety Center |
| 6 | 694.15 m/1 min 3 s | 10300 | Bisan 119 Safety Center |
| 7 | 1229.12 m/1 min 51 s | 10800 | Bisan 119 Safety Center |
| 8 | 1059.56 m/1 min 36 s | 10700 | Bisan 119 Safety Center |
| 9 | 935.54 m/1 min 25 s | 10200 | Bisan 119 Safety Center |
| 10 | 632.82 m/57 s | 10900 | Bisan 119 Safety Center |
| 11 | 1125.11 m/1 min 41 s | 10100 | Ihyeon 119 Safety Center |
| 12 | 466.32 m/42 s | 10100 | Naedang 119 Safety Center |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Kim, M.-S.; Hong, W.-H.; Lee, Y.-H.; Baek, S.-C. Selection of Take-Off and Landing Sites for Firefighter Drones in Urban Areas Using a GIS-Based Multi-Criteria Model. Drones 2022, 6, 412. https://doi.org/10.3390/drones6120412
AMA Style
Kim M-S, Hong W-H, Lee Y-H, Baek S-C. Selection of Take-Off and Landing Sites for Firefighter Drones in Urban Areas Using a GIS-Based Multi-Criteria Model. Drones. 2022; 6(12):412. https://doi.org/10.3390/drones6120412
Chicago/Turabian StyleKim, Min-Seok, Won-Hwa Hong, Yoon-Ha Lee, and Seung-Chan Baek. 2022. "Selection of Take-Off and Landing Sites for Firefighter Drones in Urban Areas Using a GIS-Based Multi-Criteria Model" Drones 6, no. 12: 412. https://doi.org/10.3390/drones6120412