Ground Control Point Distribution for Accurate Kilometre-Scale Topographic Mapping Using an RTK-GNSS Unmanned Aerial Vehicle and SfM Photogrammetry


Abstract
:1. Introduction
Study Area
2. Materials and Methods
2.1. Field Data Acquisition
2.2. SfM Photogrammetry
2.3. Ground Control Point Test Scenarios
2.4. Validation: RTK-GNSS Water Edge Check Points
3. Results
3.1. Ground Control Point Analysis
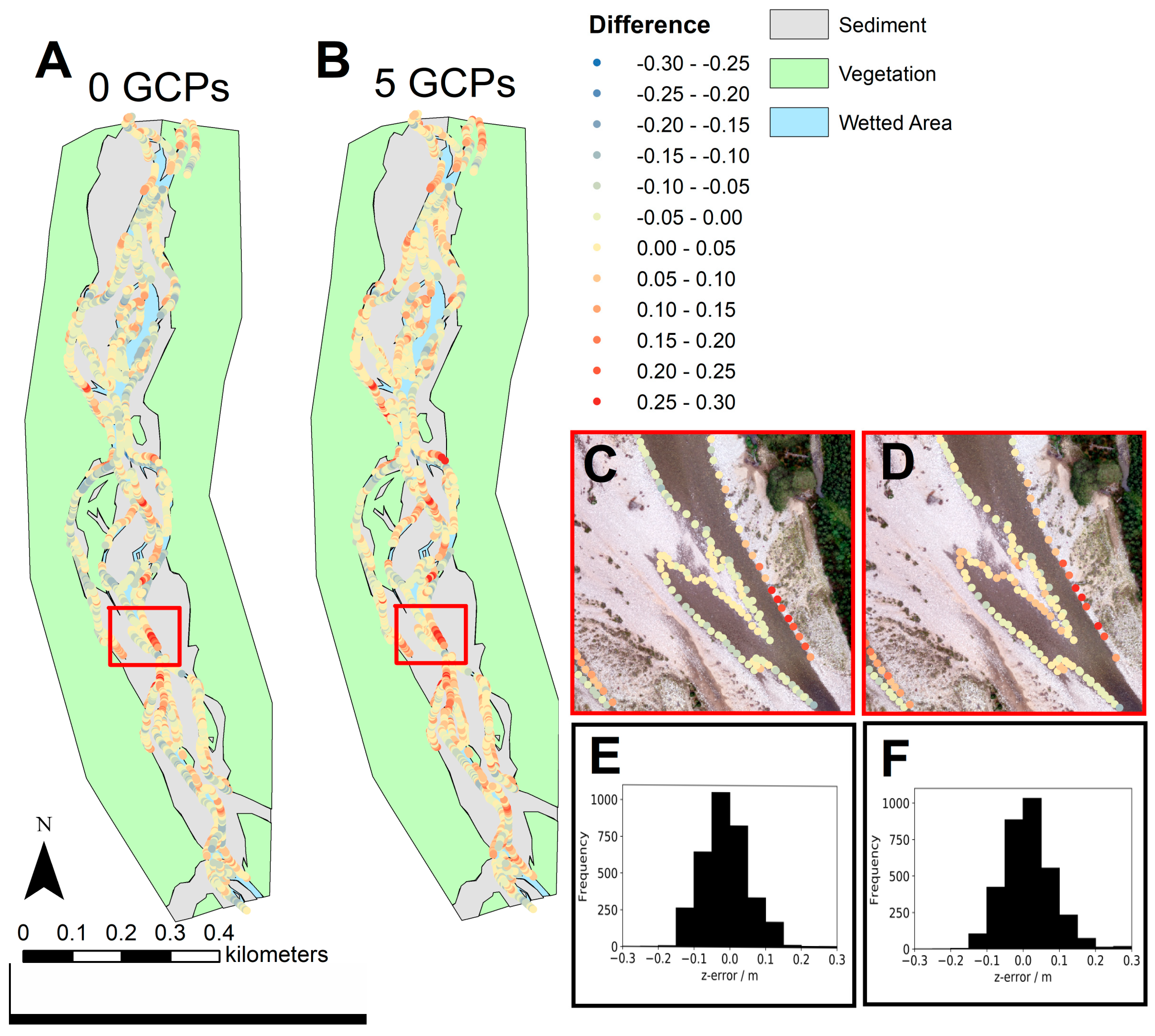
3.2. Check Point Validation
4. Discussion
4.1. Ground Control
4.2. Flight Design and Systematic Error
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Williams, R.D.; Brasington, J.; Vericat, D.; Hicks, D.M. Hyperscale terrain modelling of braided rivers: Fusing mobile terrestrial laser scanning and optical bathymetric mapping. Earth Surf. Process. Landf. 2014, 39, 167–183. [Google Scholar] [CrossRef]
- Nahorniak, M.; Wheaton, J.; Volk, C.; Bailey, P.; Reimer, M.; Wall, E.; Whitehead, K.; Jordan, C. How do we efficiently generate high-resolution hydraulic models at large numbers of riverine reaches? Comput. Geosci. 2018, 119, 80–91. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in dems from repeat topographic surveys: Improved sediment budgets. Earth Surf. Process. Landf. 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Lallias-Tacon, S.; Liebault, F.; Piegay, H. Step by step error assessment in braided river sediment budget using airborne lidar data. Geomorphology 2014, 214, 307–323. [Google Scholar] [CrossRef]
- Buchanan, D.H.; Naylor, L.A.; Hurst, M.D.; Stephenson, W.J. Erosion of rocky shore platforms by block detachment from layered stratigraphy. Earth Surf. Process. Landf. 2020, 45, 1028–1037. [Google Scholar] [CrossRef]
- Gilham, J.; Barlow, J.; Moore, R. Detection and analysis of mass wasting events in chalk sea cliffs using uav photogrammetry. Eng. Geol. 2019, 250, 101–112. [Google Scholar] [CrossRef] [Green Version]
- Williams, R.; Bangen, S.; Gillies, E.; Kramer, N.; Moir, H.; Wheaton, J. Allt Lorgy River Restoration Scheme: Geomorphic Change Detection and Geomorphic Unit Mapping. Available online: http://researchdata.gla.ac.uk/947/ (accessed on 22 June 2020).
- Demarchi, L.; Bizzi, S.; Piegay, H. Hierarchical object-based mapping of riverscape units and in-stream mesohabitats using lidar and vhr imagery. Remote Sens. 2016, 8, 97. [Google Scholar] [CrossRef] [Green Version]
- Wyrick, J.R.; Pasternack, G.B. Geospatial organization of fluvial landforms in a gravel-cobble river: Beyond the riffle-pool couplet. Geomorphology 2014, 213, 48–65. [Google Scholar] [CrossRef] [Green Version]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising uav topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef] [Green Version]
- Woodget, A.S.; Austrums, R. Subaerial gravel size measurement using topographic data derived from a uav-sfm approach. Earth Surf. Process. Landf. 2017, 42, 1434–1443. [Google Scholar] [CrossRef]
- Carrivick, J.L.; Smith, M.W. Fluvial and aquatic applications of structure from motion photogrammetry and unmanned aerial vehicle/drone technology. Wiley Interdiscip. Rev. -Water 2019, 6, e1328. [Google Scholar] [CrossRef] [Green Version]
- Tamminga, A.; Hugenholtz, C.; Eaton, B.; Lapointe, M. Hyperspatial remote sensing of channel reach morphology and hydraulic fish habitat using an unmanned aerial vehicle (uav): A first assessment in the context of river research and management. River Res. Appl. 2015, 31, 379–391. [Google Scholar] [CrossRef]
- Marteau, B.; Vericat, D.; Gibbins, C.; Batalla, R.J.; Green, D.R. Application of structure-from-motion photogrammetry to river restoration. Earth Surf. Process. Landf. 2017, 42, 503–515. [Google Scholar] [CrossRef] [Green Version]
- Flener, C.; Vaaja, M.; Jaakkola, A.; Krooks, A.; Kaartinen, H.; Kukko, A.; Kasvi, E.; Hyyppa, H.; Hyyppa, J.; Alho, P. Seamless mapping of river channels at high resolution using mobile lidar and uav-photography. Remote Sens. 2013, 5, 6382–6407. [Google Scholar] [CrossRef] [Green Version]
- Schumann, G.J.P.; Muhlhausen, J.; Andreadis, K.M. Rapid mapping of small-scale river-floodplain environments using uav sfm supports classical theory. Remote Sens. 2019, 11, 982. [Google Scholar] [CrossRef] [Green Version]
- Javernick, L.; Hicks, D.M.; Measures, R.; Caruso, B.; Brasington, J. Numerical modelling of braided rivers with structure-from-motion-derived terrain models. River Res. Appl. 2016, 32, 1071–1081. [Google Scholar] [CrossRef]
- Reid, H.E.; Williams, R.D.; Brierley, G.J.; Coleman, S.E.; Lamb, R.; Rennie, C.D.; Tancock, M.J. Geomorphological effectiveness of floods to rework gravel bars: Insight from hyperscale topography and hydraulic modelling. Earth Surf. Process. Landf. 2019, 44, 595–613. [Google Scholar] [CrossRef]
- Williams, R.D.; Reid, H.E.; Brierley, G.J. Stuck at the bar: Larger-than-average grain lag deposits and the spectrum of particle mobility. J. Geophys. Res. -Earth Surf. 2019, 124, 2751–2756. [Google Scholar] [CrossRef] [Green Version]
- Woodget, A.S.; Austrums, R.; Maddock, I.P.; Habit, E. Drones and digital photogrammetry: From classifications to continuums for monitoring river habitat and hydromorphology. Wiley Interdiscip. Rev. -Water 2017, 4, e1222. [Google Scholar] [CrossRef] [Green Version]
- Martinez-Carricondo, P.; Aguera-Vega, F.; Carvajal-Ramirez, F.; Mesas-Carrascosa, F.-J.; Garcia-Ferrer, A.; Perez-Porras, F.-J. Assessment of uav-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. -Earth Environ. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- Hardin, P.J.; Lulla, V.; Jensen, R.R.; Jensen, J.R. Small unmanned aerial systems (suas) for environmental remote sensing: Challenges and opportunities revisited. GIScience Remote Sens. 2019, 56, 309–322. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from uav and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Wackrow, R.; Chandler, J.H. Minimising systematic error surfaces in digital elevation models using oblique convergent imagery. Photogramm. Rec. 2011, 26, 16–31. [Google Scholar] [CrossRef] [Green Version]
- Woodget, A.S.; Carbonneau, P.E.; Visser, F.; Maddock, I.P. Quantifying submerged fluvial topography using hyperspatial resolution uas imagery and structure from motion photogrammetry. Earth Surf. Process. Landf. 2015, 40, 47–64. [Google Scholar] [CrossRef] [Green Version]
- Dietrich, J.T. Bathymetric structure-from-motion: Extracting shallow stream bathymetry from multi-view stereo photogrammetry. Earth Surf. Process. Landf. 2017, 42, 355–364. [Google Scholar] [CrossRef]
- Zahawi, R.A.; Dandois, J.P.; Holl, K.D.; Nadwodny, D.; Reid, J.L.; Ellis, E.C. Using lightweight unmanned aerial vehicles to monitor tropical forest recovery. Biol. Conserv. 2015, 186, 287–295. [Google Scholar] [CrossRef] [Green Version]
- Klingbeil, L.; Eling, C.; Heinz, E.; Wieland, M.; Kuhlmann, H. Direct georeferencing for portable mapping systems: In the air and on the ground. J. Surv. Eng. 2017, 143, 04017010. [Google Scholar] [CrossRef]
- Grayson, B.; Penna, N.T.; Mills, J.P.; Grant, D.S. Gps precise point positioning for uav photogrammetry. Photogramm. Rec. 2018, 33, 427–447. [Google Scholar] [CrossRef] [Green Version]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; di Cella, U.M.; Roncella, R.; Santise, M. Quality assessment of dsms produced from uav flights georeferenced with on-board rtk positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef] [Green Version]
- Eltner, A.; Sofia, G. Structure from motion photogrammetric technique. In Developments in Earth Surface Processes; Elsevier: Amsterdam, The Netherlands, 2020; Volulme 23, pp. 1–24. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Chris, M.J.; Edward, M.M.; James, S. Manual of Photogrammetry; ASPRS: Bethesda, MD, USA, 2004. [Google Scholar]
- Han, S. Quality-control issues relating to instantaneous ambiguity resolution for real-time gps kinematic positioning. J. Geod. 1997, 71, 351–361. [Google Scholar] [CrossRef]
- Hamshaw, S.D.; Bryce, T.; Rizzo, D.M.; O’Neil-Dunne, J.; Frolik, J.; Dewoolkar, M.M. Quantifying streambank movement and topography using unmanned aircraft system photogrammetry with comparison to terrestrial laser scanning. River Res. Appl. 2017, 33, 1354–1367. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dietrich, J.T. Cost-effective non-metric photogrammetry from consumer-grade suas: Implications for direct georeferencing of structure from motion photogrammetry. Earth Surf. Process. Landf. 2017, 42, 473–486. [Google Scholar] [CrossRef] [Green Version]
- Stöcker, C.; Nex, F.; Koeva, M.; Gerke, M. Quality assessment of combined imu/gnss data for direct georeferencing in the context of uav-based mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 355. [Google Scholar] [CrossRef] [Green Version]
- Lerch, A.W.A.T. Comparing Workflow and Point Cloud Outputs of the Trimble sx10 tls and Sensefly Ebee Plus Drone. Available online: https://www.sensefly.com/app/uploads/2018/05/Comparing-workflow-and-point-cloud-outputs-of-the-Trimble-SX-10-TLS-and-senseFly-eBee-Plus.pdf (accessed on 22 June 2020).
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Coastal mapping using dji phantom 4 rtk in post-processing kinematic mode. Drones 2020, 4, 9. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Aldana-Jague, E.; Clapuyt, F.; Wilken, F.; Vanacker, V.; Van Oost, K. Evaluating the potential of post-processing kinematic (ppk) georeferencing for uav-based structure-from-motion (sfm) photogrammetry and surface change detection. Earth Surf. Dyn. 2019, 7, 807–827. [Google Scholar] [CrossRef] [Green Version]
- Hastedt, H.; Luhmann, T. Investigations on the quality of the interior orientation and its impact in object space for uav photogrammetry. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, International Conference on Unmanned Aerial Vehicles in Geomatics, Toronto, ON, Canada, 30 August–2 September 2015; Volume 40. [Google Scholar]
- Fraser, C.S. Automatic camera calibration in close range photogrammetry. Photogramm. Eng. Remote Sens. 2013, 79, 381–388. [Google Scholar] [CrossRef] [Green Version]
- Sanz-Ablanedo, E.; Chandler, J.H.; Ballesteros-Pérez, P.; Rodríguez-Pérez, J.R. Reducing systematic dome errors in digital elevation models through better uav flight design. Earth Surf. Process. Landf. 2020. [Google Scholar] [CrossRef]
- Griffiths, D.; Burningham, H. Comparison of pre-and self-calibrated camera calibration models for uas-derived nadir imagery for a sfm application. Prog. Phys. Geogr. Earth Environ. 2019, 43, 215–235. [Google Scholar] [CrossRef] [Green Version]
- Jaud, M.; Passot, S.; Allemand, P.; Le Dantec, N.; Grandjean, P.; Delacourt, C. Suggestions to limit geometric distortions in the reconstruction of linear coastal landforms by sfm photogrammetry with photoscan® and micmac® for uav surveys with restricted gcps pattern. Drones 2019, 3, 2. [Google Scholar] [CrossRef] [Green Version]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Kasprak, A.; Sear, D.; Vericat, D. Morphodynamic signatures of braiding mechanisms as expressed through change in sediment storage in a gravel-bed river. J. Geophys. Res. -Earth Surf. 2013, 118, 759–779. [Google Scholar] [CrossRef] [Green Version]
- Hodge, R.; Brasington, J.; Richards, K. Analysing laser-scanned digital terrain models of gravel bed surfaces: Linking morphology to sediment transport processes and hydraulics. Sedimentology 2009, 56, 2024–2043. [Google Scholar] [CrossRef]
- Williams, R.D.; Lamy, M.-L.; Maniatis, G.; Stott, E. Three-dimensional reconstruction of fluvial surface sedimentology and topography using personal mobile laser scanning. Earth Surf. Process. Landf. 2020, 45, 251–261. [Google Scholar] [CrossRef]
- Brasington, J.; Rumsby, B.; McVey, R. Monitoring and modelling morphological change in a braided gravel-bed river using high resolution gps-based survey. Earth Surf. Process. Landf. J. Br. Geomorphol. Res. Group 2000, 25, 973–990. [Google Scholar] [CrossRef]
- Gilvear, D.; Cecil, J.; Parsons, H. Channel change and vegetation diversity on a low-angle alluvial fan, river feshie, scotland. Aquat. Conserv. Mar. Freshw. Ecosyst. 2000, 10, 53–71. [Google Scholar] [CrossRef]
- Werritty, A.; McEwen, L. Glen feshie. In Quaternary of Scotland; Chapman and Hall: London, UK, 1993; Volume 6, pp. 298–303. [Google Scholar]
- Stott, E. Rainfall-to-Reach, Modelling of Braided Morphodynamics. University of Glasgow. 2019. Available online: http://theses.gla.ac.uk/70942/7/2019StottMSc.pdf (accessed on 22 June 2020).
- Lingua, A.; Noardo, F.; Spanò, A.; Sanna, S.; Matrone, F. 3d model generation using oblique images acquired by uav. In Proceedings of the The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, FOSS4G-Europe 2017–Academic Track, Marne La Vallée, France, 18–22 July 2017; Volume 42. [Google Scholar]
- James, M.R.; Chandler, J.H.; Eltner, A.; Fraser, C.; Miller, P.E.; Mills, J.P.; Noble, T.; Robson, S.; Lane, S.N. Guidelines on the use of structure-from-motion photogrammetry in geomorphic research. Earth Surf. Process. Landf. 2019, 44, 2081–2084. [Google Scholar] [CrossRef]
- Pix4D. Processing dji Phantom 4 rtk Datasets with pix4d. Available online: https://community.pix4d.com/t/processing-dji-phantom-4-rtk-datasets-with-pix4d/7823 (accessed on 22 June 2020).
- DEFRA. Map Projections Explained. Available online: https://magic.defra.gov.uk/Help_Projections.htm (accessed on 22 June 2020).
- Uren, J.; Price, W.F. Surveying for Engineers; Macmillan International Higher Education: London, UK, 2010. [Google Scholar]
- Williams, R.D.; Brasington, J.; Hicks, M.; Measures, R.; Rennie, C.; Vericat, D. Hydraulic validation of two-dimensional simulations of braided river flow with spatially continuous adcp data. Water Resour. Res. 2013, 49, 5183–5205. [Google Scholar] [CrossRef] [Green Version]
- McKean, J.; Nagel, D.; Tonina, D.; Bailey, P.; Wright, C.W.; Bohn, C.; Nayegandhi, A. Remote sensing of channels and riparian zones with a narrow-beam aquatic-terrestrial lidar. Remote Sens. 2009, 1, 1065–1096. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Antoniazza, G.; Robson, S.; Lane, S.N. Mitigating systematic error in topographic models for geomorphic change detection: Accuracy, precision and considerations beyond off-nadir imagery. Earth Surf. Process. Landf. 2020. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of unmanned aerial vehicle (uav) and sfm photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Investigation Details | Hamshaw et al., (2017) [37] | Carbonneau and Dietrich (2017) [38] | Stocker et al., (2017) [39] | Weber and Lerch (2018) [40] | Forlani et al., (2018) [32] | Zhang et al., (2019) [42] | Taddia et al., (2020) [41] | Grayson et al., (2020) [31] |
|---|---|---|---|---|---|---|---|---|
| UAV Type | (i) Sensefly eBee Classic; (ii) SenseFly eBee Plus RTK | (i) DJI Phantom 3 Professional; (ii) DJI Inspire 1 | DelairTech DT 18 UAV | SenseFly eBee Plus RTK | SenseFly eBee-RTK | (i) Custom-Hexacopter (w/DSLR camera and GNSS RTK); (ii) DJI Phantom 3 Advanced UAV (adapted: + fisheye camera and GNSS RTK) | DJI Phantom 4 RTK | QuestUAV fixed-wing Q-200 aircraft |
| Camera Type, and Megapixels | (i) SenseFly S.O.D.A. (20 Mpixel); (ii) Compact Sony Cyber-Shot DSC-WX220 (18.2 Mpixel) | (i) Integrated camera model FC300, 12 Mpixel; (ii) Integrated camera model FC350, 12 Mpixel | Industrial grade 5 MP RGB sensor (pixel pitch of 3.45μm) | Compact Sony Cyber-Shot DSC-WX220 (18.2 Mpixel) | Compact Sony Cyber-Shot DSC-WX220 (18.2 Mpixel) | (i) Canon EOS 550D camera (18 Mpixel); (ii) Hero GoPro 3 camera (12 Mpixel) | DJI 1” CMOS sensor camera (20 Mpixel) | Sony ILCE-6000 digital compact camera (24.3 Mpixel) |
| Flying Height | 100 m | 60 m and 80 m | 100 m | 100 and 150 m | 90 m | (i) 20 m, 35 m; (ii) 45 m | 80 m | 120 m |
| Ground Sampling Distance | 3.6 cm | not given | 2.8 cm | 2.5 cm and 3.6 cm | 2.3 cm | (i) 0.63 cm; (ii) 3.11 cm | 2 cm | 3 cm |
| Number of Targets | 10 (4 GCPs, 6 CKPs) | 0 | 22 | 9 | 23 (Tests: (i) 12 GCPs; (ii) 0 GCPs; (iii) 1 GCP) | 16. Different GCP/Check Point configurations tested. | 40. Different GCP/Check Point configurations tested. | 40 |
| Survey Setting | Rural (500 m × 500 m per site, 7 sites total) | Rural (150 × 150 m) and Urban (150 × 90 m) | Urban (1400 × 1400 m) | Rural (4 ha) | Urban (550 × 330 m) | Rural (1.7 ha) | Rural (2000 m × 130 m) | Rural (250 m × 600 m) |
| Imagery Orientation | Oblique | Nadiral and Oblique | Oblique | Not stated | Oblique | Not stated | Nadiral and Oblique | Not stated |
| GNSS Positioning | RTK | RTK | PPK | RTK and PPK | RTK and NRTK | PPK | PPK | PPP vs. PPK |
| GNSS Data Processing | SenseFly eMotion software package and Pix4D | MATLAB and Photoscan Pro and CloudCompare | Applanix POSPac UAV software | Agisoft PhotoScan and Cloud Compare and AutoCAD. | Photoscan | RTKLib and Pix4D | MATLAB and Agisoft Metashape | PANDA scientific software (Liu and Ge, 2003) and APERO Software |
| Error and Assessment Method | UAV, TLS (RIEGEL VZ-1000) and RTK-GNSS data compared. RMSE 0.022–0.154 m (TLS/RTK). RMSE 0.033–0.698 m (UAV/RTK). | Error was determined by PSfM = M7 Ptrue + η. η = precision (scatter) of the SfM point cloud. η ranges from 0.06 to 0.55 m. | PPK compared to no post processing (pp). Mean Error (ME) on check point residuals calculated for 8 scenarios (S). S1 and S2 (no pp), ME −9.284 m (S2). S5–8 (PPK) ME range 0.033 to 0.727 m. | UAV and TLS (Trimble SX10) point clouds compared. ME and standard deviation (CloudCompare), volume and spatial extent differences (AutoCAD). ME ranged from 0.055 to 0.095 m. | RTK only: z RMSE ranged from 0.02 to 0.12 m. GCP and RTK + 1 GCP: z RMSE ranged from 0.018 to 0.045 m. DSM mean error (cm) and standard deviation were also calculated. | PPK Compared to no pp for different GCP configurations. (i) z RMSE 3.45 m (no PPK, no GCP), 0.03 m (PPK, 1 GCP); (ii) z RMSE 3.27 m (No PPK, no GCP), 0.03 m (PPK, 1 GCP). | Compared image orientation and GCP configuration. z RMSE: Nadiral −0.051 m 1 GCP, 0.021 m (21 GCPs), Oblique −0.022 m (0GCPs), 0.016 m (21 GCPs), Nadiral + Oblique −0.025 m (0 GCPs). | Compared PPP to PPK. PPP: z RMSE is 3 pixels (0 GCP), 1 pixel (4 GCPs). PPK: z RMSE is <1 pixel (0GCP). |
| Setting: | Survey Type | Braided River Survey | ||||||
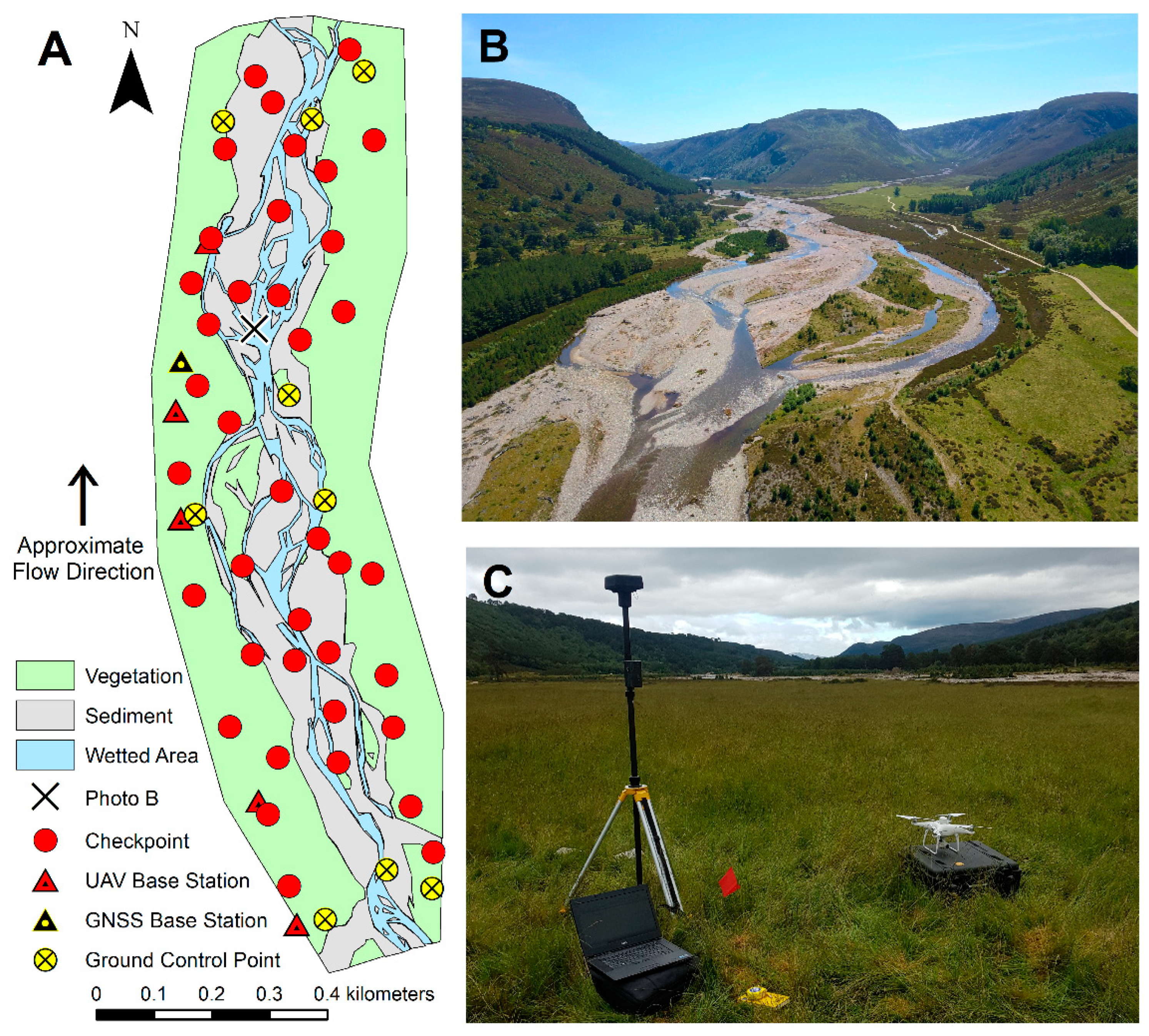
| Location | River Feshie, Glen Feshie, Scotland | |||||||
| Latitude, Longitude | 57.0089°, −3.9020° | |||||||
| Date (dd/mm/yyyy) | 01/07/2019 | |||||||
| Equipment: | Camera Manufacturer | DJI | ||||||
| Camera Model | FC6310R_8.8_5472×3648 | |||||||
| Number of Images | 3390 | |||||||
| Number of Flights | 12, Flying 5 Flight Blocks | |||||||
| Image Size (pixels) | 5472 × 3648 | |||||||
| Sensor Size | 1” CMOS; Effective pixels: 20 M (13.2 × 8.8 mm) | |||||||
| Focal Length | 8.55 mm; 3658.3 pixels | |||||||
| Lens Type | FOV (Field of View) 84°, 8.8 mm | |||||||
| Sensor Shutter Type | Rolling | |||||||
| Mechanical Shutter Speed | 8-1/2000s | |||||||
| Electronic Shutter Speed | 8-1/8000s | |||||||
| Survey Design: | Flight Height (m) | 70 | ||||||
| Ground Sampling Distance | 2.276 cm | |||||||
| Area Covered (m) | 1710 × 460 | |||||||
| Perspective of Images | Oblique (15°) | |||||||
| Image Overlap (front) | 80% | |||||||
| Weather | Sun and Cloud, <20 mph Winds, 10 °C | |||||||
| Photogrammetric Processing: | Software | Pix4D Mapper Version 4.4.12 | ||||||
| Keypoints Image Scale | 1 (original image size) | |||||||
| Matching Image Pairs | Aerial Grid or Corridor | |||||||
| Calibration Method | Standard | |||||||
| Internal Parameters Optimization | All | |||||||
| External Parameters Optimization | All | |||||||
| Lens Used | Perspective Lens | |||||||
| Internal Camera Parameters | Focal Length (mm) | Principal Point x (mm) | Principal Point y (mm) | R1 | R2 | R3 | T1 | T2 |
| Initial Values | 8.580 | 6.385 | 4.304 | −0.269 | 0.112 | −0.033 | 0.000 | −0.001 |
| Optimised Values | 8.618 | 6.405 | 4.253 | −0.267 | 0.112 | −0.034 | 0.000 | −0.001 |
| Uncertainty (Sigma) | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| Mean Error (m) | Mean Absolute Error (m) | Standard Deviation (m) | Root Mean Squared Error (m) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Number of GCPs | Configuration | x-axis | y-axis | z-axis | x-axis | y-axis | z-axis | x-axis | y-axis | z-axis | x-axis | y-axis | z-axis |
| 0 | Zero | −0.002 | 0.001 | 0.018 | 0.016 | 0.020 | 0.056 | 0.023 | 0.024 | 0.070 | 0.023 | 0.024 | 0.073 |
| 1 | Centre | −0.001 | 0.001 | 0.013 | 0.014 | 0.020 | 0.054 | 0.023 | 0.024 | 0.070 | 0.023 | 0.024 | 0.071 |
| 2 | Ends | 0.000 | 0.001 | 0.030 | 0.014 | 0.020 | 0.057 | 0.022 | 0.023 | 0.069 | 0.022 | 0.024 | 0.076 |
| 3 | Ends + Centre | 0.020 | 0.001 | −0.026 | 0.021 | 0.020 | 0.057 | 0.022 | 0.023 | 0.070 | 0.032 | 0.024 | 0.074 |
| 4 | Edges | 0.015 | 0.009 | 0.002 | 0.018 | 0.021 | 0.055 | 0.022 | 0.023 | 0.071 | 0.028 | 0.026 | 0.071 |
| 5 | Edges + Centre | 0.013 | 0.002 | −0.020 | 0.018 | 0.020 | 0.057 | 0.022 | 0.023 | 0.072 | 0.027 | 0.024 | 0.075 |
| 6 | Edges | 0.002 | −0.006 | 0.005 | 0.015 | 0.019 | 0.054 | 0.022 | 0.022 | 0.072 | 0.022 | 0.023 | 0.072 |
| Scenario | Mean Error (m) | Mean Absolute Error (m) | Root Mean Squared Error (m) | Standard Deviation Error (m) |
|---|---|---|---|---|
| 0 GCPs | −0.010 | 0.053 | 0.067 | 0.066 |
| 0.028 | 0.003 | 0.003 | 0.007 | |
| 5 GCPs | 0.016 | 0.054 | 0.074 | 0.072 |
| 0.036 | 0.003 | 0.002 | 0.003 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stott, E.; Williams, R.D.; Hoey, T.B. Ground Control Point Distribution for Accurate Kilometre-Scale Topographic Mapping Using an RTK-GNSS Unmanned Aerial Vehicle and SfM Photogrammetry. Drones 2020, 4, 55. https://doi.org/10.3390/drones4030055
Stott E, Williams RD, Hoey TB. Ground Control Point Distribution for Accurate Kilometre-Scale Topographic Mapping Using an RTK-GNSS Unmanned Aerial Vehicle and SfM Photogrammetry. Drones. 2020; 4(3):55. https://doi.org/10.3390/drones4030055
Chicago/Turabian StyleStott, Eilidh, Richard D. Williams, and Trevor B. Hoey. 2020. "Ground Control Point Distribution for Accurate Kilometre-Scale Topographic Mapping Using an RTK-GNSS Unmanned Aerial Vehicle and SfM Photogrammetry" Drones 4, no. 3: 55. https://doi.org/10.3390/drones4030055