Proximity and Contact Sensing with Instrumented Compliant Wrist for Close Guidance of Robotic Manipulators †


1
University of Ottawa, 800 King Edward, Ottawa, ON K1N 6N5, Canada
2
University of Ottawa, 800 King Edward, Ottawa, ON K1N 6N5, Canada
*
Author to whom correspondence should be addressed.
†
Presented at the 3rd International Electronic Conference on Sensors and Applications, 15–30 November 2016; Available online: https://sciforum.net/conference/ecsa-3.
Proceedings 2017, 1(2), 31; https://doi.org/10.3390/ecsa-3-E009
Published: 14 November 2016
(This article belongs to the Proceedings of Proceedings of the 3rd International Electronic Conference on Sensors and Applications, 15–30 November 2016; Available online: https://sciforum.net/conference/ecsa-3.)
Abstract
:Compliance in robotic systems has been exploited to allow rigid mechanisms to come into contact with complex and possibly fragile objects. By incorporating compliance and instrumentation into a single device nearby objects can be detected before direct contact occurs. That way, safer and smoother robot guidance can be achieved both while approaching and while touching surfaces. Furthermore, the path planning and control problem is simplified as position based algorithms can be used regardless of the state of the system, be it in free motion or constrained motion, or even during transitions between the two modes. This paper presents the design and experimental validation of a lightweight, low-cost and stand-alone instrumented compliant wrist mechanism which can be mounted on the tool plate of any rigid robotic manipulator. Embedded arrays of infrared sensors provide distance measurements. Each is finely tuned via a novel calibration procedure that overcomes inter-sensor variability. All signal processing is also embedded and wireless transmission connects the device to the robot controller to support path control. Real-time acquired measurements on the position and orientation of surfaces located in close proximity or in contact with the robot’s end effector permit close guidance of its operation. Experimental work demonstrates how the device provides physical compliance to prevent large impact forces to occur during non-contact to contact transitions by the manipulator’s end effector. It also demonstrates the stability and accuracy of the device outputs. Primary applications of the proposed instrumented compliant wrist include smooth surface following in manufacturing and safe human-robot interaction.
1. Introduction
The vast majority of robotic manipulators currently in use in manufacturing are designed to meet very specific precision and repeatability requirements. However, this becomes a limitation when dealing with unstructured environments. Research is therefore conducted to determine how existing robotic platforms could be enhanced without making significant changes to their fundamental structure while introducing a level of adaptivity and response to a transforming environment. Taking inspiration from how humans interact with their environment, compliance was identified as a key aspect required for adaptive and responsive robotic interaction with objects. This paper reports on the development and experimental evaluation of a sensing device capable of providing compliance to a rigid robotic structure while measuring the relative position and orientation of objects in its close proximity as well as the surface coordinates of objects in direct physical contact with the device. The sensing device is referred to as an instrumented compliant wrist. It is meant to serve as an un-actuated end-effector attachment to be mounted on a robotic arm in order to provide the robot controller with sensory information to safely operate either in close proximity with a target object or maneuver while in contact with said object. It supports fine motion guidance in applications such as smooth surface following or interaction with sensitive objects.
One key aspect that biological systems have over many robotic technologies are their intrinsic elastic properties and material flexibility. This is often referred to as compliance in robotic contexts. Compliance provides an adaptable interface between the environment and the robot that can relax some of the strict constraints often seen in complex motion planning techniques. Compliant manipulators have been designed with intrinsic compliance either in the form of flexible links or by incorporating compliant structures directly into the connecting joints. In [1] a manipulator makes use of series of elastic actuators [2] that incorporate a degree of compliance into the joints by making use of springs. In the context of force control, elasticity influences the control scheme of a robot. Much like humans who can feel forces being applied to the body but lacking the means of precisely measuring those forces, simply being aware of these forces by inferring them nevertheless allows for the ability to react to them when sensed. The concept of making touch a primary source of information during motion guidance is analogous to how humans are able to interact with their environment when their vision is impaired. The work of Bach-y-Rita and Kercel [3] provides useful insights as to how the human brain can make use of one type of sensory information and effectively translate it into another form. The Obrero manipulator [4] was inspired by how humans manipulate objects, favoring sensing of their environment via multiple modalities over precision. However, the development of robotic systems which are able to take advantage of these innovative ideas can be a costly endeavour, mostly because of the required modifications to existing mechanisms [5]. With the large supply of industrial robots currently in operation, it is preferable to apply the concepts used in compliant manipulators without incurring such massive investments. The proposed compliant wrist design aims at fulfilling this gap.
Compliant wrists have been investigated in the literature. An initial design was presented in 1982 [6] for improving the accuracy of industrial robots in manufacturing applications. Another compliant wrist sensor [7,8] makes use of capacitive principles to measure 2D bending moments, as well as force and torsion in the perpendicular direction. The limited thickness of the compliant layer however provides only a limited range of movement and therefore limits the applications of the device. In [9] a compliant wrist is designed based on passive compliance analysis. The wrist produces estimation of two rotations and one translation. Its kinematic model however resolves to a complex implementation due to the movement of the joints and position of attachment points. Paul et al. [10,11] introduced a compliant wrist structure that consists of two plates separated by a compliant, damped rubber structure to provide passive compliance and is equipped with a sensing mechanism to measure the deflections of the 6 DOFs allowed by the compliance. Another compliant wrist was designed for performing surface exploration tasks with the goal of extracting geometric features of the surface being contacted [12]. This compliant wrist can provide gross position and orientation estimations as well as finer geometric surface profile information. The latter however allowed very little displacement and its motion was highly constrained.
2. Instrumented Compliant Wrist Design
Building upon the principle of multiple modality sensors, a design is proposed that provides feedback to the robot arm controller both while the end effector is approaching a surface, and after contact is achieved. This not only provides additional information to the robot but also allows it to take advantage of the pre-contact information, increasing safety during navigation and fulfilling the gap of information available from vision sensors that may be occluded or not accurate enough [13].
The compliant wrist assembly consists of two plates separated by components allowing for deflection of the upper compliant plate under externally applied forces. Instrumentation capable of dynamically measuring this deflection is embedded within the wrist assembly providing a sense of touch to the device. Additional instrumentation is added to the periphery of the bottom plate to measure the location of an object’s surface before it comes into contact with the upper compliant plate, providing the proximity detection capability of the device. The combination of these two sensory layers provides the necessary measurements for fine tuning the movements of the robot arm while maneuvering in close proximity to the surface with which it is meant to interact but before contact occurs, as well as adapting the end effector’s configuration to conform to the surface’s position and orientation after contact occurs. Figure 1a shows the primary mechanical components of the device. The enclosure at the base of the wrist houses an embedded microcontroller, wireless communications module, and power source. The mechanism which provides passive compliance sits above the electronics enclosure. The mechanism achieves its compliance with a combination of compression and tension springs that apply forces on the upper plate to maintain an equilibrium state when no external forces are applied to it. Under influence from external forces, the upper plate rotates about its pivot point centered on the plate and can compress toward the bottom plate.
Four analog infrared (IR) range sensors are mounted to the bottom plate and positioned in such a way as to allow for direct measurement of the distance between the sensors and the movable upper plate. These are referred to as the internal, or contact, sensors. Four additional IR sensors located at the outermost periphery act as the proximity sensory layer and measure distance to closest objects in front of the compliant wrist. These are referred to as the external, or proximity, sensors. Figure 1b provides a top down view of the positioning of all sensors on the compliant wrist. The latter is also designed to be mounted to the tool plate of any manipulator robot, as shown in Figure 1c. Embedded wireless communication ensures that all information generated by the compliant wrist is delivered to the robot controller. The communication channel is bidirectional allowing also the robot controller to make data requests as necessary. This information, coupled with the state information of the robot, is used by the robot controller within the implemented trajectory planning algorithms to direct the motion of the robot.
The infrared range sensors are the key components for the instrumentation of the compliant wrist module. They allow for the detection of objects in proximity to the device as well as an indirect means of detecting physical contact between the device and its environment by measuring deflections of the movable (upper) plate interface. In order to effectively integrate these sensors into the compliant wrist system, an extensive experimental study of their operational characteristics was conducted. The output of these IR sensors exhibit a nonlinear relationship to the physical distance, as shown in Figure 2a. Because two different IR sensors typically provide slightly different measurements over identical distances, and given that these measurements are not exactly matched to the specifications, a formal calibration procedure [13] was developed to ensure consistency and to increase accuracy of the compliant wrist measurements. Moving average filtering of the raw signals is also implemented. Figure 2b,d demonstrate the favorable impact of the filtering and calibration processes for the compliant wrist to produce reliable distance estimates.
The physical design of the proposed compliant wrist provides for a simple kinematic representation of the device with 3 DOFs, namely two rotational DOFs and one translational DOF. As the device employs two independent sets of four IR sensors, both sets of sensors operate in the same fashion and are capable of generating similar distance information from their respective anchor points. The internal sensors are used for measuring the deflection of the movable contact plate while the external sensors are charged with the detection of objects in the environment and estimating their relative pose with respect to the compliant wrist. For the internal sensors, since the surface of the movable plate is assumed to be uniformly planar (by design), the representation involves only two rotations and one translation to completely charaterize the detected displacement of the compliant plate. When dealing with the external sensor array any surface shape can be encountered. Normal vectors meant to further describe the general surface characteristics of the encountered objects are also estimated from the measured distances to refine the object’s shape description and its relative orientation [13,14].
3. Compliant Wrist Experimental Performance Evaluation
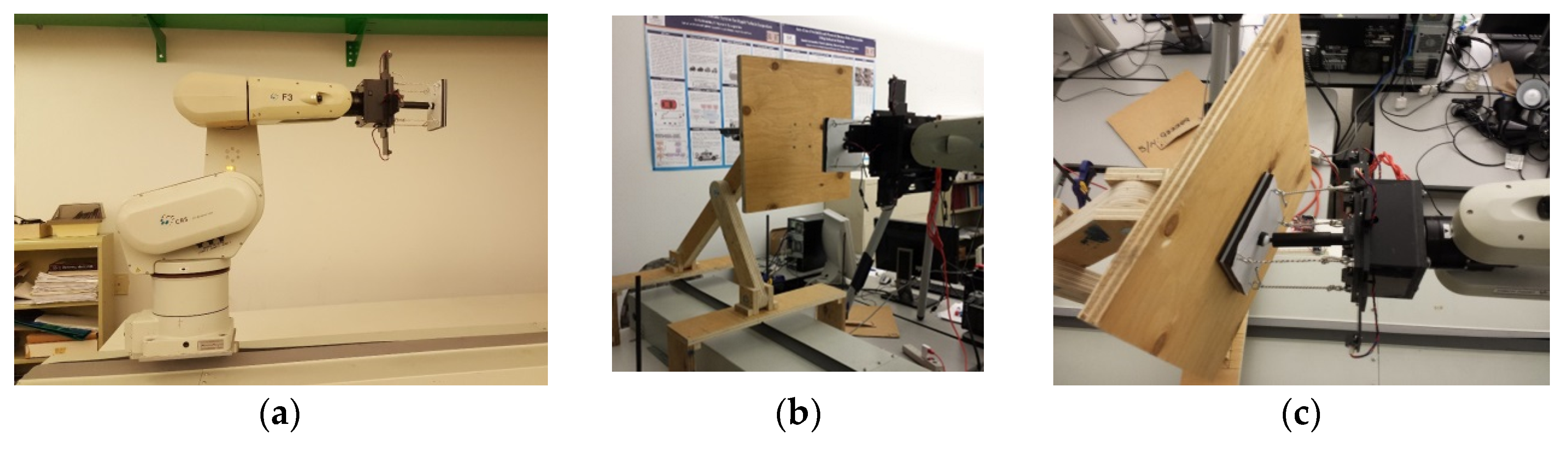
To evaluate the performance of the compliant wrist under various operating conditions, it was mounted onto a CRS-F3 6 degrees-of-freedom manipulator robot, as shown in Figure 3. Various scenarios of interaction were examined: (i) cases where the wrist is positioned at a particular orientation and distance away from the surface, as shown in Figure 3b, that is when the external sensory layer monitors the distance to a proximal surface; and (ii) cases where the compliant surface of the wrist is in contact with a planar surface and with various orientations, as shown in Figure 3c, that is when the internal sensory layer monitors the relative transformation between the base and the compliant plates of the wrist. In all test cases, distance measurements were collected and compared to ground truth values obtained by manual distance and orientation measurements. These experiments provided data to evaluate the stability and accuracy of the pose estimates provided by the instrumented wrist, under proximity and in-contact operational conditions.
Table 1 reports on average distance and rotation estimates provided by the wrist when operating in the proximity mode. Distance between the wrist and the target planar surface (Tz) was respectively set to 50, 75 and 100 mm, and relative rotations of 0° and −30° around the X axis respectively were considered in each case. The results show that variations slightly increase with the distance for all parameters, as expected as the IR sensors’ resolution decreases for larger distances (Figure 2a).
Similarly Table 2 reports on average distance and rotations estimates provided by the wrist when operating in the contact mode. In this case, two distances (Tz) are considered, −10 and −20 mm, corresponding to the compression magnitude of the compliant wrist under the force exerted by the surface with which it is in contact. Respective rotations of the planar surface with respect to the wrist are 0° (parallel) and −10° (angled). The signal variations in distance and orientation are fairly constant for both compression distances. The smaller distances allowed by the wrist when in contact impose lower limits to the errors associated with the parameters.
The slight deviations of the mean values from their respective set points are due in part to the amount of precision with which the calibration of the IR sensors can effectively be performed as well as the difficulties faced when trying to obtain sub millimetre precision on the ground truth values. These experiments demonstrate the accuracy and stability achieved by the instrumentation embedded in the compliant wrist as narrow standard deviations are observed across all experiments. The compliant wrist’s sensing system has a distance resolution of approximately 2.3 mm at maximum range of operation (40 cm), and 0.085 mm at the closest range. For rotations, the worst angular sensitivity is 1.435 degree over largest distances for the compliant plate (0.5 degree for external surfaces). In comparison, [10] reports worst-case accuracies of 0.6 mm for translation and 0.0099 radians (0.57°) for rotation. The compliant plate of the prototype also supports a translation range of −25 mm to +10 mm with rotation ranges for both axes of ±40°. Comparatively, [12] reports a 10 mm travel distance of the upper plate. The developed compliant wrist is therefore more versatile and as accurate as comparable devices reported in the literature.
4. Conclusions
This paper presented the development of a flexible and affordable mechanical structure designed and equipped with sensing apparatus to support multi-step compliant interaction between a manipulator robot and its environment. The measurements provided by the external array of IR range sensors allow for real-time refinement of the trajectory while the manipulator is approaching a surface to ensure smooth initial contact. Information from the internal sensory layer is used to control the robot’s motion during contact. Experimental validation of the compliant wrist mounted on an industrial manipulator showed that the compliant wrist system is capable of achieving precise measurements, reaching sub-millimeter variations in favorable conditions. Additionally, the physical compliance afforded by the compliant wrist prevents large impact forces to be incurred during non-contact to contact transitions by the manipulator’s end effector.
Author Contributions
The authors jointly developed the concept; P. Laferrière designed and built the prototype, and performed the experiments; all the authors analyzed the data and jointly wrote the paper.
Acknowledgments
The authors wish to acknowledge the contribution of R. Toledo and D. Nakhaeinia to the early design and experimental validation phases of this research. This work has been supported in part by the Natural Sciences and Engineering Research Council of Canada (NSERC).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Quigley, M.; Asbeck, A.; Ng, A. A Low-Cost Compliant 7-DOF Robotics Manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 6051–6058. [Google Scholar]
- Pratt, G.A.; Williamson, M.M. Series of Elastic Actuators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems–Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995; pp. 399–406. [Google Scholar]
- Bach-y-Rita, P.; Kercel, S.W. Sensory Substitution and the Human-Machine Interface. Trends Cognit. Sci. 2003, 7, 541–546. [Google Scholar] [CrossRef] [PubMed]
- Torres-Jara, E. Obrero: A Platform for Sensitive Manipulation. In Proceedings of the IEEE-RAS International Conference on Humanoid Robotics, Tsukuba, Japan, 5–7 December 2005; pp. 327–332. [Google Scholar]
- Bicchi, A.; Peshkin, M.A.; Colgate, J.E. Safety for Physical Human-Robot Interaction. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1335–1348. [Google Scholar]
- Cutkosky, M.R.; Wright, P.K. Position Sensing Wrists for Industrial Manipulators. In Proceedings of the 12th International Symposium of Industrial Robots, Paris, France, 9–11 June 1982. [Google Scholar]
- Wolffenbuttel, R.F.; Mahmoud, K.M.; Regtien, P.P.L. Compliant Capacitive Wrist Sensor for Use in Industrial Robots. IEEE Trans. Instrum. Meas. 1990, 39, 991–997. [Google Scholar] [CrossRef]
- Wolffenbuttel, R.F.; Mahmoud, K.M.; Regtien, P.P.L. Multiaxis Compliant Capacitive Wrist Sensor for Use in Automated Assembly with Industrial Robots. In Proceedings of the IEEE International Conference on Instrumentation and Measurement Technology, San Jose, CA, USA, 13–15 February 1990; pp. 54–59. [Google Scholar]
- Hashimoto, M.; Imanura, Y. Design and Characteristics of a Parallel Link Compliant Wrist. In Proceedings of the IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; Volume 3, pp. 2457–2462. [Google Scholar]
- Lindsay, T.S.; Sinha, P.R.; Paul, R.P. An Instrumented Compliant Wrist for Robotics Applications. In Proceedings of the IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; pp. 648–653. [Google Scholar]
- Sinha, P.R.; Xu, Y.; Bajcsy, R.K.; Paul, R.P. Robotic Exploration of Surfaces with a Compliant Wrist Sensor. Int. J. Robot. Res. 1993, 12, 107–120. [Google Scholar] [CrossRef]
- Petriu, E.; McMath, W.S.; Yueng, S.S.K.; Trif, N. Active Tactile Perception of Object Surface Geometric Profiles. IEEE Trans. Instrum. Meas. 1992, 41, 87–92. [Google Scholar] [CrossRef]
- Laferrière, P. Instrumented Compliant Wrist System for Enhanced Robotic Interaction. M.Sc. Thesis, University of Ottawa, Ottawa, ON, Canada, 2016. [Google Scholar]
- Nakhaeinia, D.; Laferrière, P.; Payeur, P.; Laganière, R. Safe Close-Proximity and Physical Human-Robot Interaction Using Industrial Robots. In Proceedings of the 12th Conference on Computer and Robot Vision, Halifax, NS, Canada, 3–5 June 2015; pp. 237–244. [Google Scholar]
Figure 1.
Compliant wrist prototype: (a) Mechanical assembly; (b) Sensors arrangement; (c) Communication with robot controller.
Figure 1.
Compliant wrist prototype: (a) Mechanical assembly; (b) Sensors arrangement; (c) Communication with robot controller.
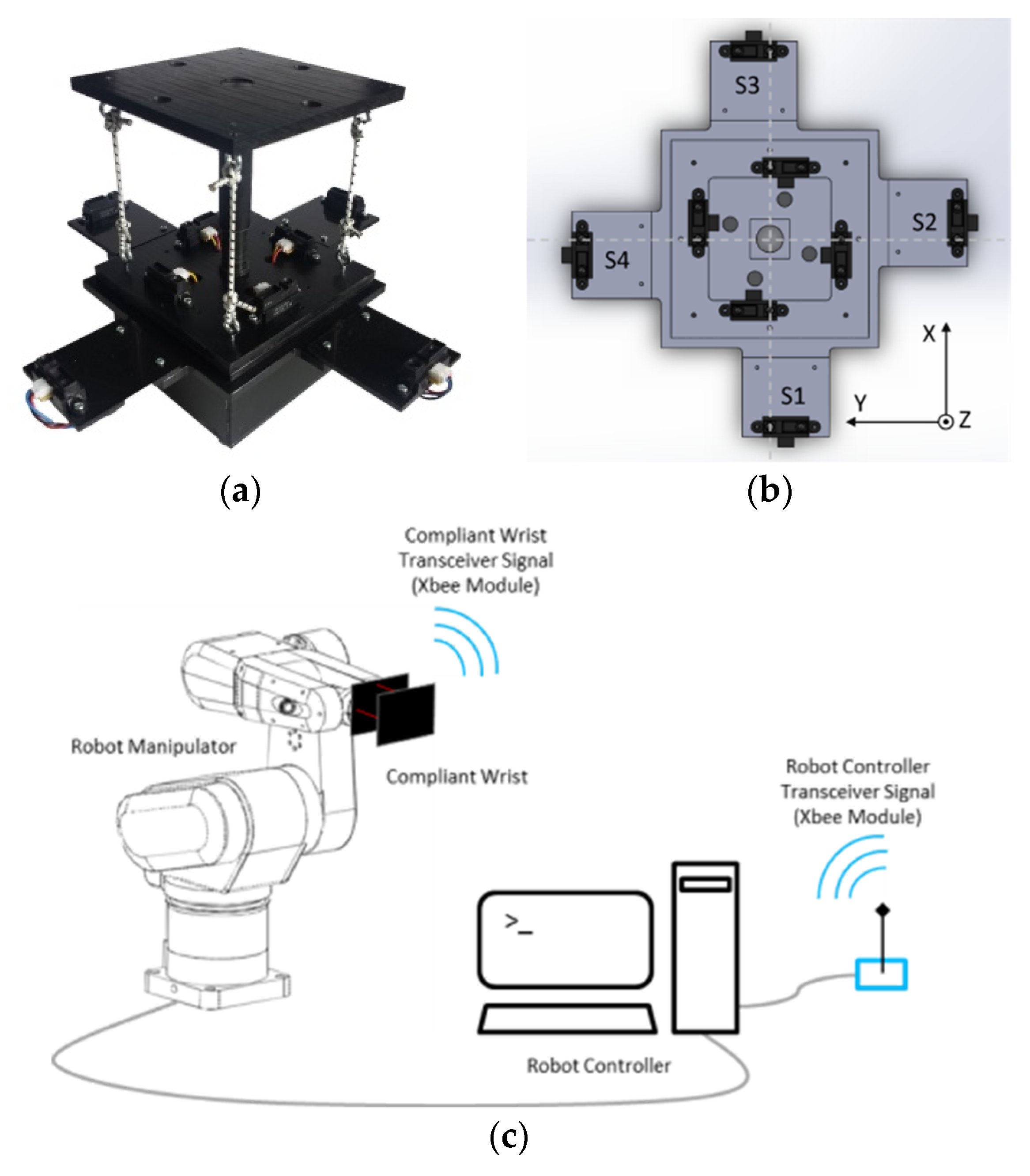
Figure 2.
Compliant wrist’s IR sensors: (a) Characteristic response; (b) Raw response from four sensors; (c) Filtered response from four sensors; (d) Filtered and calibrated response from four sensors at a same distance from a surface (here 60 mm).
Figure 2.
Compliant wrist’s IR sensors: (a) Characteristic response; (b) Raw response from four sensors; (c) Filtered response from four sensors; (d) Filtered and calibrated response from four sensors at a same distance from a surface (here 60 mm).
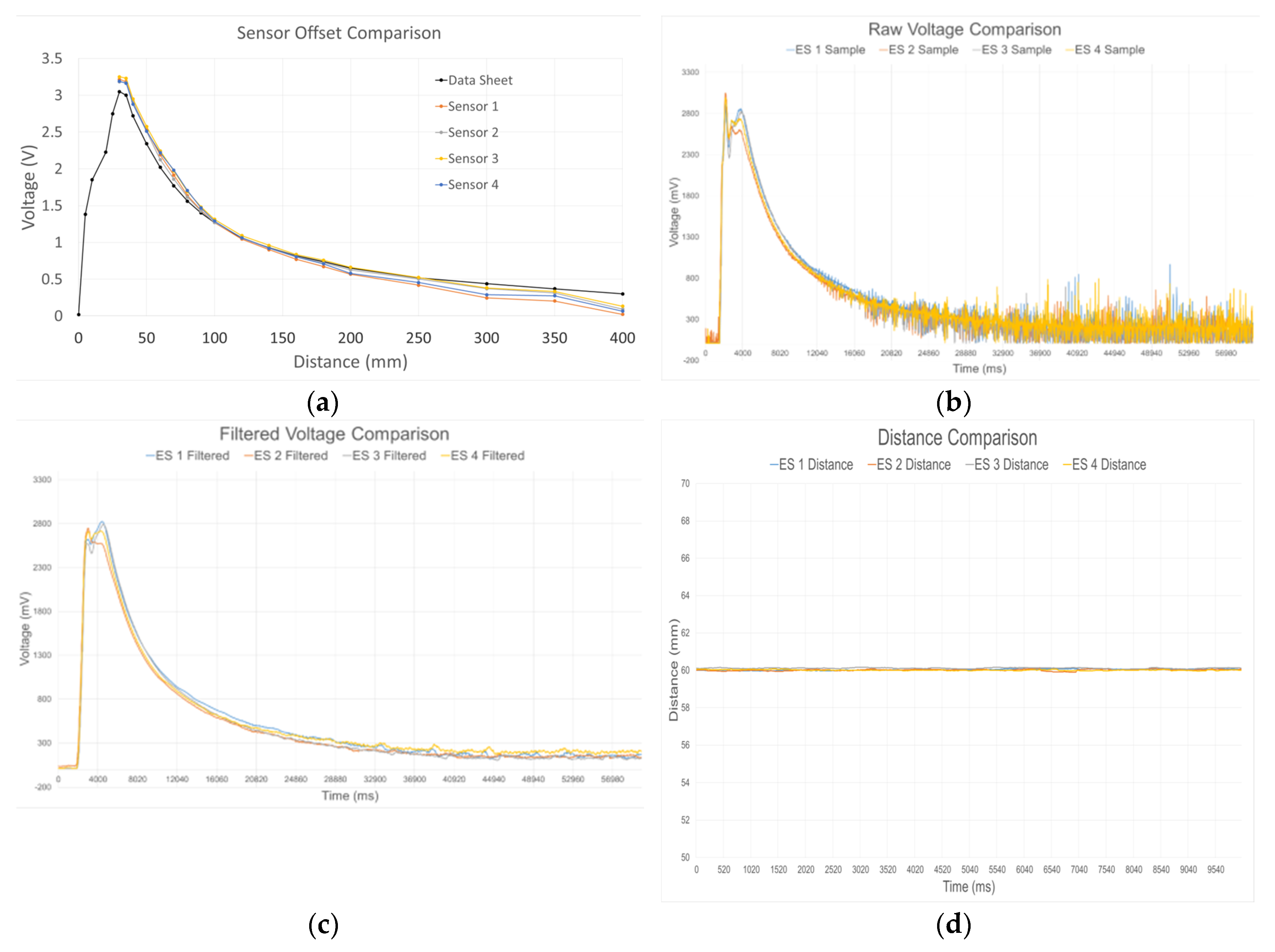
Figure 3.
Experimental performance evaluation of the compliant wrist: (a) Assembly mounted as the end effector of a CRS-F3 manipulator; (b) Compliant wrist in proximity to a planar surface; (c) Compliant wrist in contact with angled planar surface.
Figure 3.
Experimental performance evaluation of the compliant wrist: (a) Assembly mounted as the end effector of a CRS-F3 manipulator; (b) Compliant wrist in proximity to a planar surface; (c) Compliant wrist in contact with angled planar surface.

{kind=link}
{kind=link}
{kind=link}
Table 1.
3-DOF transformation parameters obtained when operating close to a planar surface.
| Tz(Rx = 0°) (mm) | Tz(Rx = −30°) (mm) | Rx(Rx = 0°) (°) | Rx(Rx = −30°) (°) | Ry(Rx = 0°) (°) | Ry(Rx = −30°) (°) | |
|---|---|---|---|---|---|---|
| Tz = 50 mm | 50.33 ± 0.15 | 49.32 ± 0.49 | −0.04 ± 0.06 | −30.62 ± 0.33 | 0.01 ± 0.12 | −0.16 ± 0.04 |
| Tz = 75 mm | 75.59 ± 0.25 | 75.47 ± 0.74 | 0.19 ± 0.18 | −29.97 ± 0.40 | 0.06 ± 0.24 | 0.09 ± 0.19 |
| Tz = 100 mm | 102.23 ± 0.33 | 101.60 ± 0.62 | 0.25 ± 0.27 | −30.47 ± 0.33 | −0.06 ± 0.22 | 0.38 ± 0.22 |
Table 2.
3-DOF transformation parameters obtained when operating in contact with a planar surface.
| Tz(Rx = 0°) (mm) | Tz(Rx = −10°) (mm) | Rx(Rx = 0°) (°) | Rx(Rx = −10°) (°) | Ry(Rx = 0°) (°) | Ry(Rx = −10°) (°) | |
|---|---|---|---|---|---|---|
| Tz = −10 mm | −9.91 ± 0.08 | −9.88 ± 0.09 | 0.02 ± 0.14 | −10.36 ± 0.13 | 0.05 ± 0.15 | −0.10 ± 0.19 |
| Tz = −20 mm | −19.91 ± 0.07 | −20.01 ± 0.07 | −0.08 ± 0.08 | −10.21 ± 0.11 | −0.01 ± 0.08 | 0.13 ± 0.14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Laferrière, P.; Payeur, P. Proximity and Contact Sensing with Instrumented Compliant Wrist for Close Guidance of Robotic Manipulators. Proceedings 2017, 1, 31. https://doi.org/10.3390/ecsa-3-E009
AMA Style
Laferrière P, Payeur P. Proximity and Contact Sensing with Instrumented Compliant Wrist for Close Guidance of Robotic Manipulators. Proceedings. 2017; 1(2):31. https://doi.org/10.3390/ecsa-3-E009
Chicago/Turabian StyleLaferrière, Pascal, and Pierre Payeur. 2017. "Proximity and Contact Sensing with Instrumented Compliant Wrist for Close Guidance of Robotic Manipulators" Proceedings 1, no. 2: 31. https://doi.org/10.3390/ecsa-3-E009