Consensus-Based Cooperative Control Approach Applied to Urban Traffic Networks †


Centre for Automation and Robotics (CSIC—UPM), Ctra. Campo Real Km. 0.2, Arganda del Rey,28500 Madrid, Spain
*
Author to whom correspondence should be addressed.
†
Presented at the 3rd International Electronic Conference on Sensors and Applications, 15–30 November 2016; Available online: https://sciforum.net/conference/ecsa-3.
Proceedings 2017, 1(2), 29; https://doi.org/10.3390/ecsa-3-E008
Published: 14 November 2016
(This article belongs to the Proceedings of Proceedings of the 3rd International Electronic Conference on Sensors and Applications, 15–30 November 2016; Available online: https://sciforum.net/conference/ecsa-3.)
{kind=link}
{kind=link}
Abstract
:Nowadays many studies are conducted to develop solutions for improving the performance of urban traffic networks. One of the main challenges is the necessary cooperation among different entities such as vehicles or infrastructure systems and exploit the information available through networks of sensors deployed as infrastructures for smart cities. In this work an algorithm for cooperative control of urban subsystems is applied in order to provide solutions for mobility related problems in cities. The interconnected traffic lights controllers (TLC) network adapts traffic lights cycles, based on traffic and air pollution information, in order to improve the performance of urban traffic networks. The presence of air pollution in cities is not only caused by road traffic but there are other pollution sources that contribute to increase or decrease of the pollution level. Then the problem becomes more complex. Due to the distributed and heterogeneous nature of the different components involved, a system of systems engineering approach has been followed as design method and a distributed consensus-based control algorithm has been applied. The applied control law contains a consensus-based component that uses the information shared in the network for reaching a consensus in the state of TLC network components. Furthermore, Discrete Event Systems Specification (DEVS) formalism is applied for modelling and simulation purpose. The proposed solution has been tested and validated in a simulated environment corroborating that the proposed solution is a powerful technique to deal with simultaneous responses to both pollution levels and traffic flows in urban traffic networks.
1. Introduction
Current smart cities research aims to integration of urban subsystems where the subsystems have to work together [1]. From a system engineering standpoint, a city can be considered as a physical system composed by several coupled, also physical, subsystems. These subsystems usually have different nature, i.e. system with different domain or different timing aspects, such as pollution measurement systems or traffic monitoring and control systems. However their behaviours are somehow related. The heterogeneity of the systems involves new challenges in the model-based design approach. On the other hand, the increasing number of sensors, actuators, communication systems and low cost computation already deployed in cities, enable new applications that can go beyond specific systems and cover different urban systems and scenarios.
In this work we apply System of System (SoS) Engineering design methods and a consensus-based cooperative control algorithm to urban scenarios in order to provide solutions for mobility-related problems in cities. Due to the distributed nature of the involved subsystems, distributed consensus-based control algorithm is applied.
Consensus is a fundamental problem in the study of cooperative control for distributed multi-agent coordination. Nanayakkara et al. [2], proposed consensus-based control as a SoS cooperative control paradigm for extract greater benefit from systems constituents of a SoS. This approach aims to make a set of systems to achieve their own objectives as well as their common goals using communications between them. Consensus algorithms have been widely applied to distributed cooperative systems such as swarm robots [3], urban traffic control systems [4] and wireless sensor networks, among others. Furthermore, the problem of traffic optimization in urban environments based on city pollution information can be engineered as a consensus between control agents [5].
2. Proposed Solution in a Simulated Environment
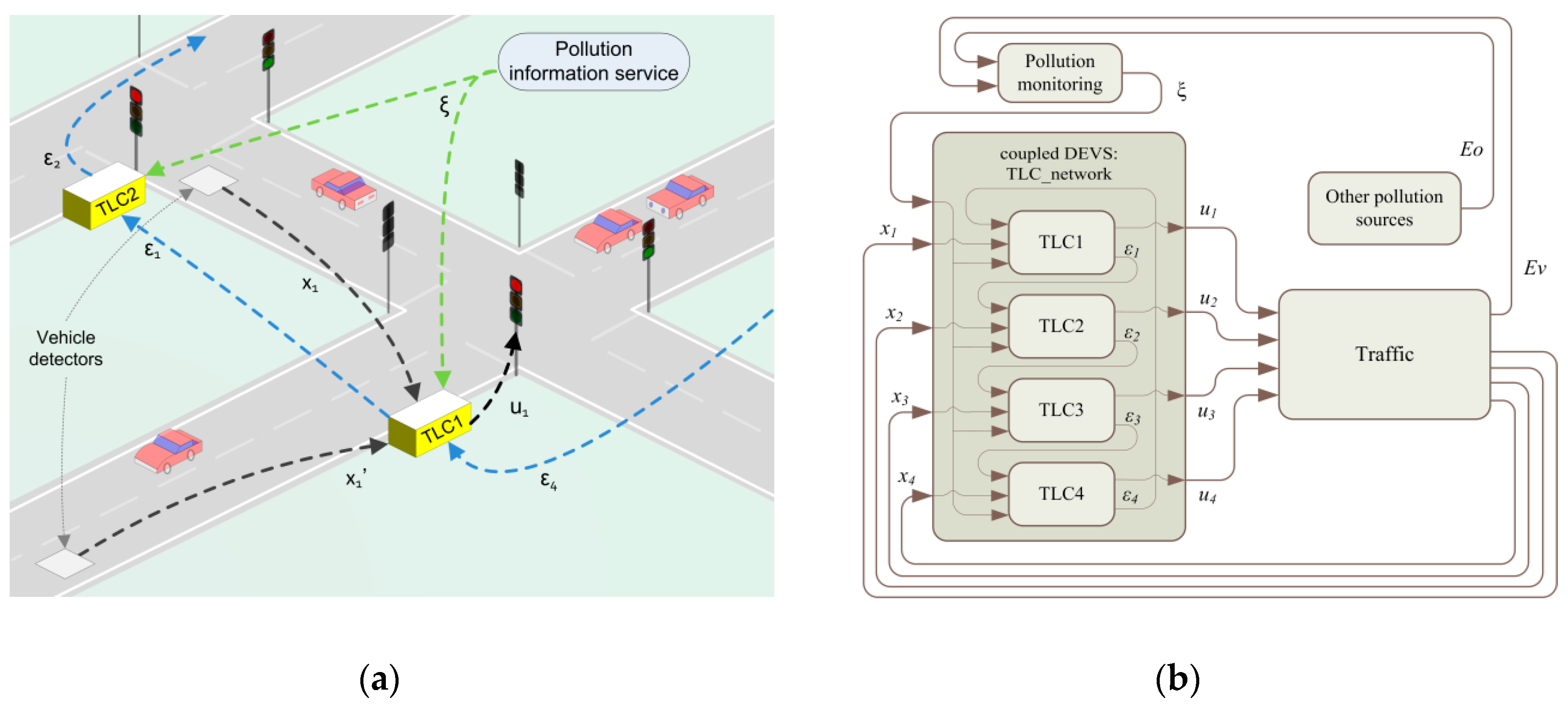
We have defined a scenario based on a smart mobility application with the aim of improving the performance of urban traffic networks in specific regions of a city. This scenario is based on an emission control scheme proposed by Andò et al. [6]. These authors suggested the idea of integrating a pollutant concentration prediction model to a vehicles emission control scheme which enables the control of urban air quality by actuating in the traffic subsystem. Figure 1a shows a general diagram of the scenario and the new approach proposed in our work, where an interconnected traffic lights control (TLC) network adapts their traffic-light cycles based on air pollution provided by a city information service and traffic information. This information service provides data () obtained from the city pollution sensing system. Moreover, traffic information () is supplied by vehicle detection sensor placed at each intersection of the urban traffic network. The traffic lights cycles () are updated by TLC units which make decisions based on a consensus variable () through a distributed consensus control algorithm. The use of city air pollution information implies other urban subsystems that contribute to the increase or decrease of the pollution level. Then the problem becomes more complex.
2.1. Modeling
In order to study the dynamic behaviour and the interaction between the different components of the scenario we have selected Discrete Event Systems Specification (DEVS) as a framework for SoS modelling and simulation. This formalism can be used for modelling and simulating complex and heterogeneous dynamical systems and their interactions [7]. DEVS modelling based approach enables specifying basic models and how they are connected together. These basic models are called atomic models and they are modular systems receiving inputs (through input ports), changing states, and generating outputs (through output ports) over a time base. The couplings between atomic models generate so-called coupled models. There exist some extensions of DEVS formalism. In this work we used Parallel DEVS formalism (PDEVS). PDEVS solves collisions between internal and external transitions allowing all imminent components to be activated and to send their output to other components. Figure 1b depicts the structure of DEVS model of the proposed scenario and how the different subsystems are connected.
2.2. Consensus-Based Cooperative Control Design
From the characterization of the problem as a system of systems, the consensus-based control is proposed as a suitable solution for the presented problem. The main idea of a consensus algorithm is to impose similar dynamics on the information states of each subsystem of the network [8]. The goal of the control system is to reach a consensus between the intersections related to an estimation of local emissions (consensus state variable) by adapting local traffic lights cycles. Specifically, a discrete form of consensus-based control algorithm is used for control coordination of the TLC network. The network communication topology is a key aspect in the system behaviour. In this case, the communication topology is defined by a directed cycle graph composed by 4 nodes.
In order to apply consensus-based control, a consensus variable that represents the system dynamics must be defined. Each TLC uses local traffic information and pollution information from a pollution information service. The dynamics of each of the intersection is the same and it has been considered that they behave as a linear system. The discrete dynamic model of the node is defined by the following recursive equation:
where [gNOx/m3] is the state of the system at instant . The pollutant considered for this work was NOx. [gNOx/m3] is a system input and represents the pollution information provided to the TLCs delayed time instants. is a dimensionless factor that represents the estimated contribution of intersection to the whole city pollution. It has been calculated based on the maximum occupancy of intersection over the total maximum occupancy. [veh] is a system input that contains the quantity of vehicles at every approach of the intersection controlled by TLCi and represents the time delay between traffic queue measurement and traffic information reception at TLCi; [gNOx/veh/m3] is a factor that characterizes the pollutant emissions of a given traffic queue at an intersection: , where is the emission factor of the pollutant (gNOx/veh/km); is the dispersion factor of the pollutants (s/m2) and is the simulation step [9]. is the control action (defined in detail later) represented as the percentage change of the cycle length of the traffic lights with respect to the initial cycle length in a limited range. [gNOx/m3/% T.L. cycle] represents the influence of the pollutant emissions in the traffic lights timing change; , where [veh/% T.L. cycle] is a factor that characterizes the queue length with respect to changes on traffic lights cycle length. This factor assumes that this relationship is proportional.
Taking into account the dynamic model considered in the Equation (1) and applying the consensus control strategy [10], a control law expression has been defined in Equation (2). The control action for each TLC uses as feedforward action the pollution (), local traffic data () and also information from the neighbour of each node of the network as a consensus-based control action.
In this control law is a parameter referred to the stability of the system and are the corresponding values of the adjacency matrix of the network defined by its communication topology. The values of the control signal () were restricted to a maximum variation of ±50% over the initial value in order to avoid large dissimilarities from the original cycle lengths that were adjusted for an open loop behaviour.
2.3. Scenario Simulation
The simulation scenario is based in an urban-like road network. It consists of an interconnected network of 4 signalized traffic intersections. The vehicles drive on the road network by following predefined routes that are generated randomly trying to imitate urban traffic. The vehicles included in the scenario are of the same type and use the same car-following model with the following parameters: length of 5 m, 2.5 m of minimum gap, 55.56 m/s of maximum speed, maximum acceleration of 2.6 m/s2, maximum deceleration 4.5 m/s2, imperfection 0.5, reaction time of 1 s and 4 persons of capacity. The number of trips is defined by the repetition rate (number of trips per second) which is calculated randomly by using a normal distribution with a mean of 5 and standard deviation of 0.25. For this scenario the routes were generated ensuring a minimum straight-line distance between start and end edges of a trip of 170 m. The simulation length was 7200 s with a simulation step size of 1 s.
Moreover, the pollutant considered in this work was NOx and the value produced by vehicles was taken from the HBEFA [11], considering they were passenger cars between 2005 and 2015 (0.35 gNOx/veh/km); the DEVS model of “Other pollution sources” produces pollution information every 5 seconds from statistical data of a common urban area without taking into account the traffic contribution to the pollution. It generates random numbers from the normal distribution with mean: μEo = 30.36 µgNOx/m³ and standard deviation: σEo = 10.48 µgNOx/m³. The DEVS model “Pollution monitoring” filters the input data by using a moving average filter with a window size of 100 s and outputs a value every 10 s. The TLC DEVS model execution period is 1 s and uses a moving average filter with a window size of 100 s.
The scenario was simulated in open and closed loop. For the open-loop simulation, the TLCs work with a fixed timing (). In the case of the closed-loop simulation, for assuring consensus stability and [veh/%T.L. cycle] (it was estimated by applying linear regression with values obtained via simulation). Also in closed-loop, each TLC calculates the new values of traffic queues (based on vehicles detector sensors placed at each intersection), the consensus variable εi and the control action . Finally, the cycle length of each traffic light is calculated and updated as , where represents its initial value.
3. Results & Discussion
Owing to the behaviour of the system is highly dependent of traffic conditions, the scenario was simulated 50 times both open loop (TLCs work with a fixed timing or ) and closed loop for subsequent comparison. In every new simulation random vehicle routes were generated.
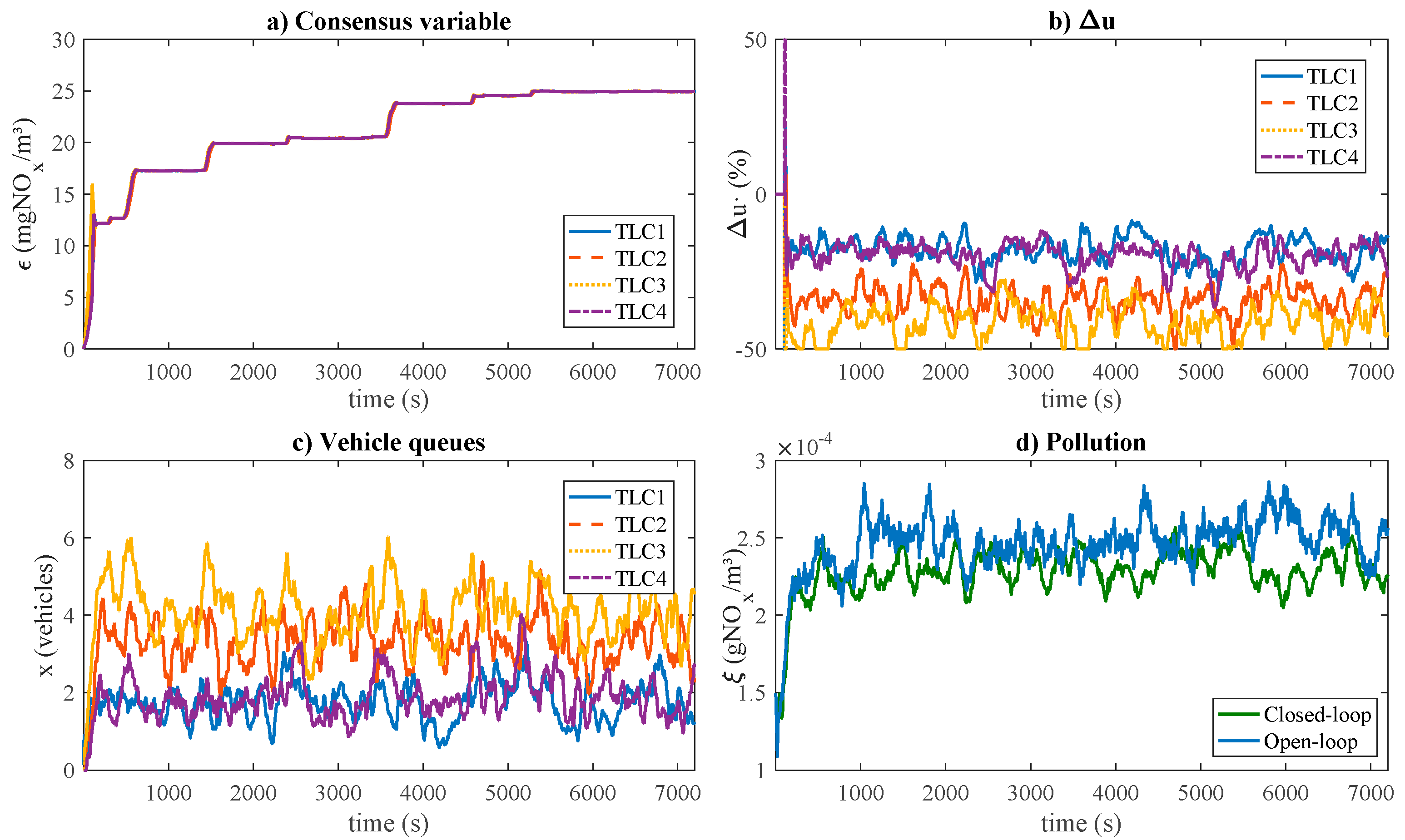
In order to evaluate the performance of the control system, two key performance indicators (KPIs) were defined as the mean of the absolute value of vehicle queues at all intersections and the global pollution during the simulation time (2 hours). In the case of vehicle queues, the average value for all simulations was 13.48 for open-loop and 12.04 for closed-loop, representing an improvement of 10.70%. Regarding global pollution, the average value was 2.39 × 10−4 for open-loop and 2.38 × 10−4 for closed-loop, with a difference of 0.37%. As can be seen, the values of closed-loop KPIs are smaller than open-loop ones. It demonstrates that vehicle queues have therefore been reduced by applying the consensus-based cooperative control system for the urban traffic network. Accordingly, the effect of balancing consensus variables in every TLC produces a global reduction of vehicle queues, because the control system is always trying to reduce traffic queues at congested intersections and increase them at uncongested ones.
4. Conclusions
In this work a cooperative control approach for a smart city environment has been introduced. In this application a traffic control subsystem uses information from the city pollution sensing system for adapting the cycle length of the traffic lights. Furthermore, consensus-based control algorithms can be applied to the specific problems of traffic optimization and pollution control. On the other hand, Discrete Event System Specification (DEVS) was used to model and simulate the whole system. This modelling paradigm allowed dealing with systems that have different sensing nature and temporal behaviour.
The proposed solution has been tested and validated in a simulated environment. The results corroborated that it is a powerful technique to deal simultaneously with information from different sensing systems for coordinating responses to both pollution levels and traffic flows in urban traffic networks. These simulations showed that the number of vehicles in queue decreased, while consensus state variable at each intersection tended towards a common value, demonstrating the validity of the proposed solution.
Author Contributions
Rodolfo Haber contributed to the state of the art analysis. Antonio Artuñedo was in charge of modeling and simulation tasks and analyzed the data. Raúl M. del Toro and Antonio Artuñedo designed the scenario, the control system and wrote the paper.
Acknowledgments
Authors wish to thank the support given by the project IoSENSE: Flexible FE/BE Sensor Pilot Line for the Internet of Everything, funded by the Electronic Component Systems for European Leadership Joint (ECSEL) Undertaking under grant agreement No 692480.This work has been also supported by MINECO (Spain) through the project RTC-2015-3942-4 TCAP: Auto. Moreover, Dr. Raúl M. del Toro acknowledges the financial support received from MINECO through grant "Juan de la Cierva-incorporación", code IJCI-2014-20169.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Gurgen, L.; Gunalp, O.; Benazzouz, Y.; Gallissot, M. Self-aware cyber-physical systems and applications in smart buildings and cities. In Proceedings of the Design, Automation & Test in Europe Conference & Exhibition (DATE), 18–22 March 2013; pp. 1149–1154. [Google Scholar]
- Nanayakkara, T.; Sahin, F.; Jamshidi, M. Intelligent Control Systems with an Introduction to System of Systems Engineering; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Joordens, M.A.; Jamshidi, M. Consensus Control for a System of Underwater Swarm Robots. Syst. J. IEEE 2010, 4, 65–73. [Google Scholar] [CrossRef]
- Wang, Z.; Sui, C. Distributed traffic network control system. In Proceedings of the 2013 IEEE International Conference on Signal Processing, Communication and Computing (ICSPCC), Kunming, China, 5–8 August 2013; pp. 1–4. [Google Scholar]
- Castro, G.; Martini, J.; Hirakawa, A. Multilayer distributed model predictive control of urban traffic. WIT Trans. Ecol. Environ. 2013, 179, 967–976. [Google Scholar]
- Ando, B.; Baglio, S.; Graziani, S.; Pecora, E.; Pitrone, N. A predictive model for urban air pollution evaluation. In Proceedings of the IEEE Instrumentation and Measurement Technology Conference Sensing, Processing, Networking, IMTC/97. Proceedings, 19–21 May 1997; Volume 2, pp. 1056–1059. [Google Scholar]
- Zeigler, B.P.; Sarjoughian, H.S. Guide to Modeling and Simulation of Systems of Systems; Springer: London, UK, 2013. [Google Scholar]
- Ren, W.; Beard, R. Distributed Consensus in Multi-Vehicle Cooperative Control: Theory and Applications; Springer: London, UK, 2007. [Google Scholar]
- Belalcazar, L.C.; Fuhrer, O.; Ho, M.D.; Zarate, E.; Clappier, A. Estimation of road traffic emission factors from a long term tracer study. Atmos. Environ. 2009, 43, 5830–5837. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent development and applications of SUMO–simulation of urban mobility. Int. J. Adv. Syst. Meas. 2012, 5, 128–138. [Google Scholar]
- Rexeis, M.; Hausberger, S.; Kühlwein, J.; Luz, R. Update of Emission Factors for Euro 5 and Euro 6 Vehicles for the HBEFA Version 3.2; TUG Report I-31/2013/Rex EM-I 2011/20/679 (http://www.hbefa.net/), TU Graz; Graz University of Technology: Graz, Austria, 2014. [Google Scholar]
- Acosta, A.; Espinosa, J.; Espinosa, J. TraCI4Matlab: Enabling the Integration of the SUMO Road Traffic Simulator and Matlab® Through a Software Re-engineering Process. In Modeling Mobility with Open Data; Behrisch, M., Weber, M., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 155–170. [Google Scholar]
- Pawletta, T.; Deatcu, C.; Pawletta, S.; Hagendorf, O.; Colquhoun, G. DEVS-based modeling and simulation in scientific and technical computing environments. Simul. Ser. 2006, 38, 151. [Google Scholar]
Figure 1.
(a) General diagram of the scenario; (b) DEVS model diagram.

Figure 2.
Close-loop simulation results: (a) Consensus variable (ε); (b) Control input (Δu); (c) Vehicle queues (x); (d) Pollution level (ξ) (closed-loop and open-loop).
Figure 2.
Close-loop simulation results: (a) Consensus variable (ε); (b) Control input (Δu); (c) Vehicle queues (x); (d) Pollution level (ξ) (closed-loop and open-loop).

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Artuñedo, A.; Del Toro, R.M.; Haber, R. Consensus-Based Cooperative Control Approach Applied to Urban Traffic Networks. Proceedings 2017, 1, 29. https://doi.org/10.3390/ecsa-3-E008
AMA Style
Artuñedo A, Del Toro RM, Haber R. Consensus-Based Cooperative Control Approach Applied to Urban Traffic Networks. Proceedings. 2017; 1(2):29. https://doi.org/10.3390/ecsa-3-E008
Chicago/Turabian StyleArtuñedo, Antonio, Raúl M. Del Toro, and Rodolfo Haber. 2017. "Consensus-Based Cooperative Control Approach Applied to Urban Traffic Networks" Proceedings 1, no. 2: 29. https://doi.org/10.3390/ecsa-3-E008