
The Way Forward for Indirect Structural Health Monitoring (iSHM) Using Connected and Automated Vehicles in Europe



Abstract
:1. Introduction
- The vehicle-acquired measurements are mathematically a function of the dynamic/modal properties of the two mechanical systems involved, the vibrating bridge and the moving vehicle [17,18]. Therefore, the bridge dynamic properties can only be inferred by the highly coupled vehicle‒bridge interaction system, while their extraction may be quite a challenging task if the vehicle-acquired data are dominated by the vehicle’s response in real applications (e.g., [19]).
2. State of Play of Research and Policy
2.1. CAV Policy Outlook in Europe
- deployment in complex urban environments, across countries, and involving large groups of end users;
- validation of the operational procedures for large-scale deployment;
- definition of test approaches to evaluate the impact of architecture and services.
2.2. Research Perspectives for iSHM Using CAVs
2.3. International Research on iSHM
- A search was carried out in January 2021 on the title, abstract, and keywords, and limited to journal papers. The exact query used was: TITLE-ABS-KEY ((“Vehicle‒Bridge Interaction” AND (“monitoring” OR “shm” OR “i-shm”)) OR ((“passing vehicle” AND bridge AND monitoring) OR ((“drive by”) AND bridge AND monitoring) OR (indirect AND bridge AND (“monitoring” OR “shm”))) AND NOT ((cable OR scour OR suspension OR “train passage”))) AND (LIMIT-TO (SUBJAREA, “ENGI”) OR LIMIT-TO (SUBJAREA, “COMP”)) AND (LIMIT-TO (DOCTYPE, “ar”) OR LIMIT-TO (DOCTYPE, “re”)). The query resulted in 102 items.
- A further manual filtering of the documents, based on the title, abstract, or full paper, narrowed down the results to 37 articles, including three review articles. The aim of this filtering was to eliminate those documents that were relevant to the field but not relevant to iSHM. Examples include documents related to vehicle‒bridge interaction in general or papers focusing on the monitoring of the road surface. Additionally, there have been several cases of lexical ambiguity.
- All articles were further analyzed on the basis of the full text.
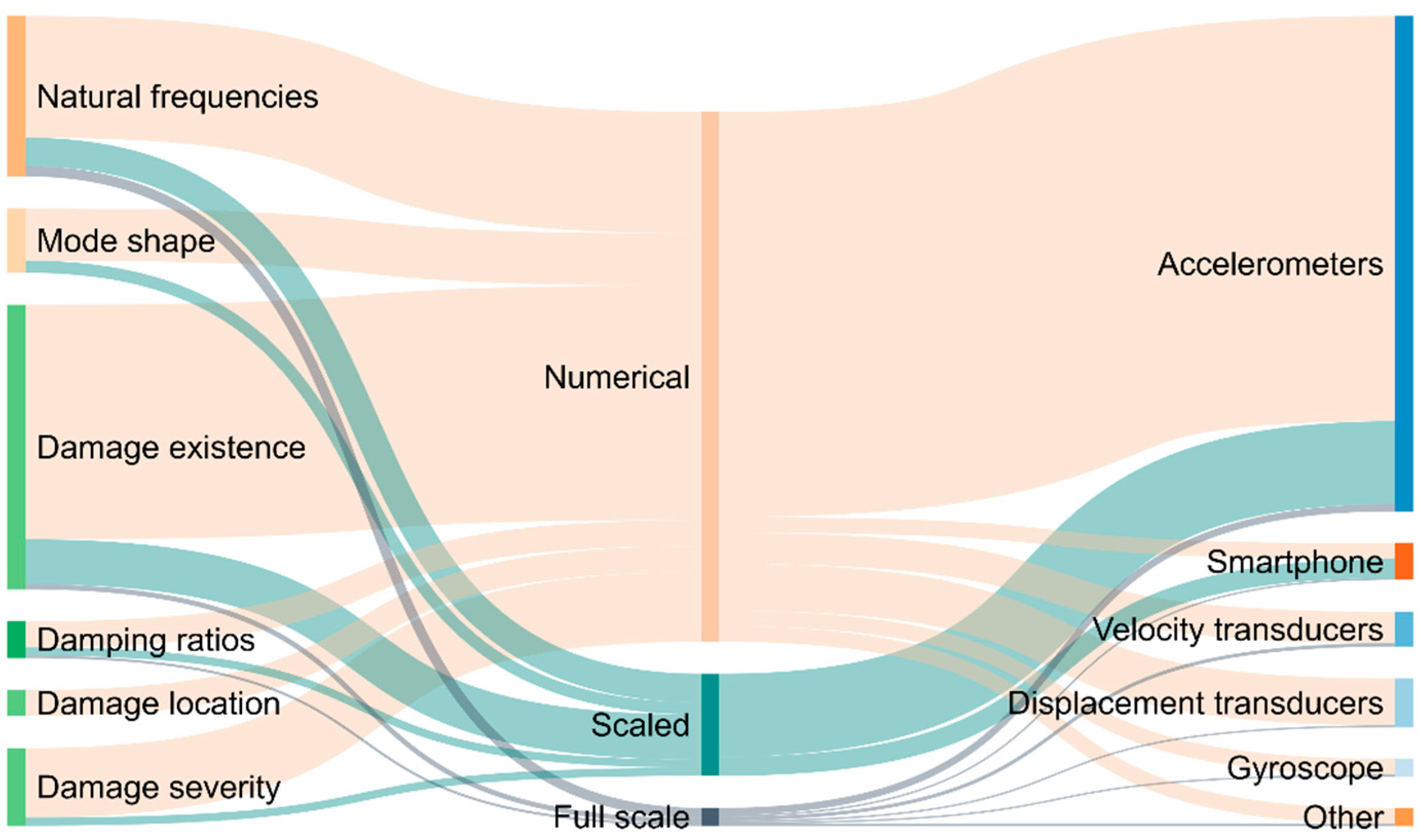
- “Publication type” (discussion paper; numerical study; scaled experimental; full-scale experimental).
- “Scope”:
- ○
- structural modal identification: natural frequencies; mode shapes; damping ratios
- ○
- damage detection: existence; location; severity
- ○
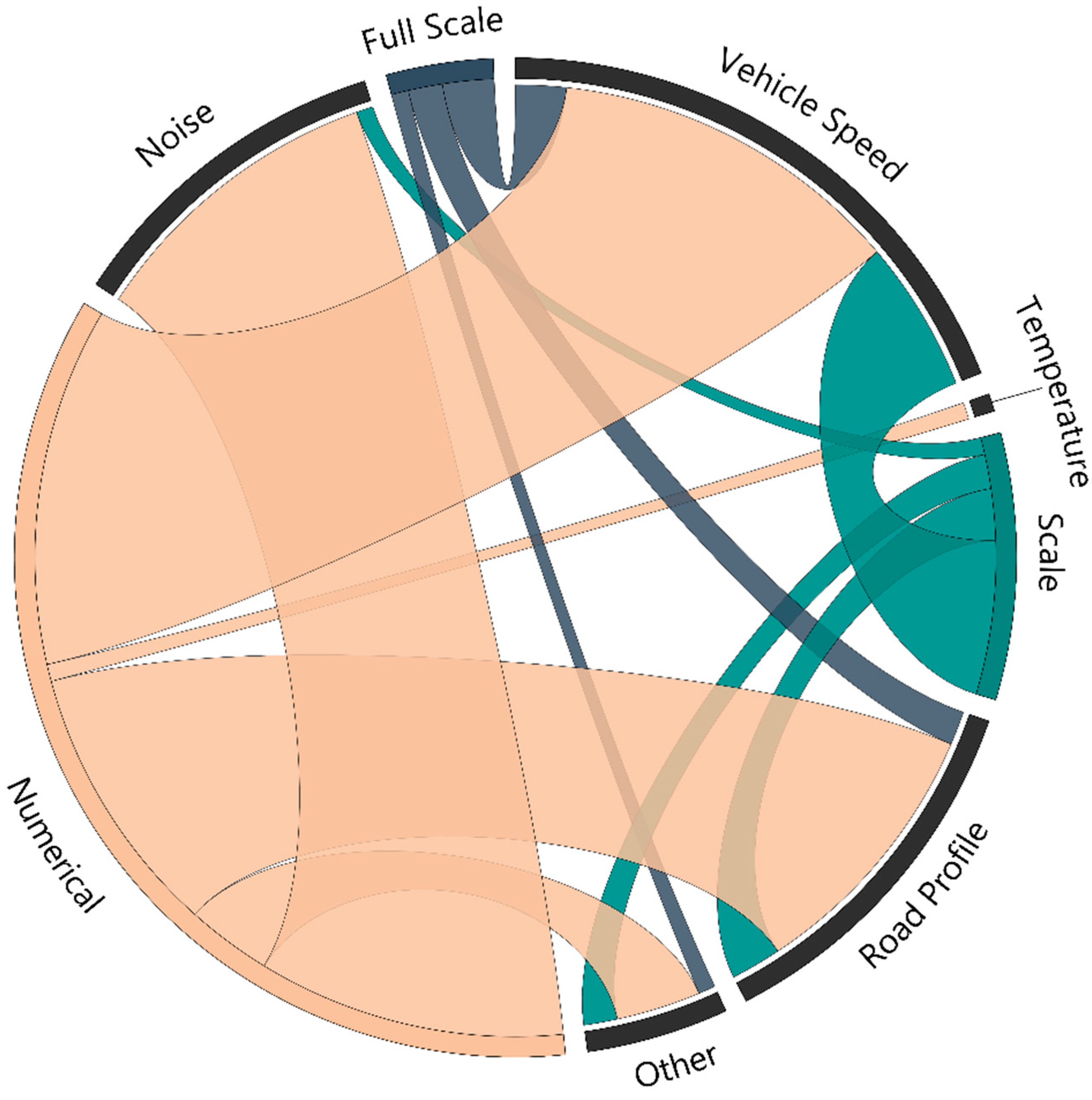
- Vehicle‒bridge interaction (VBI) sensitivity assessment: vehicle speed; road profile; temperature; noise; other.
- “Vehicle sensor system” (only for experimental studies): car; truck; tractor/trailer system; simulated scaled vehicles.
- “Vehicle simulation” (only for numerical studies): half-car model; quarter-car model.
- “Sensing units”: accelerometers; velocity transducers; displacement transducers; GPS; gyroscope; smartphone; other.
- the road profile;
- the bridge length and type;
- the interacting vehicle load and geometry;
- the vehicle speed;
- the limited interaction time between the vehicle and the bridge; and,
- the temperature/environmental effects.
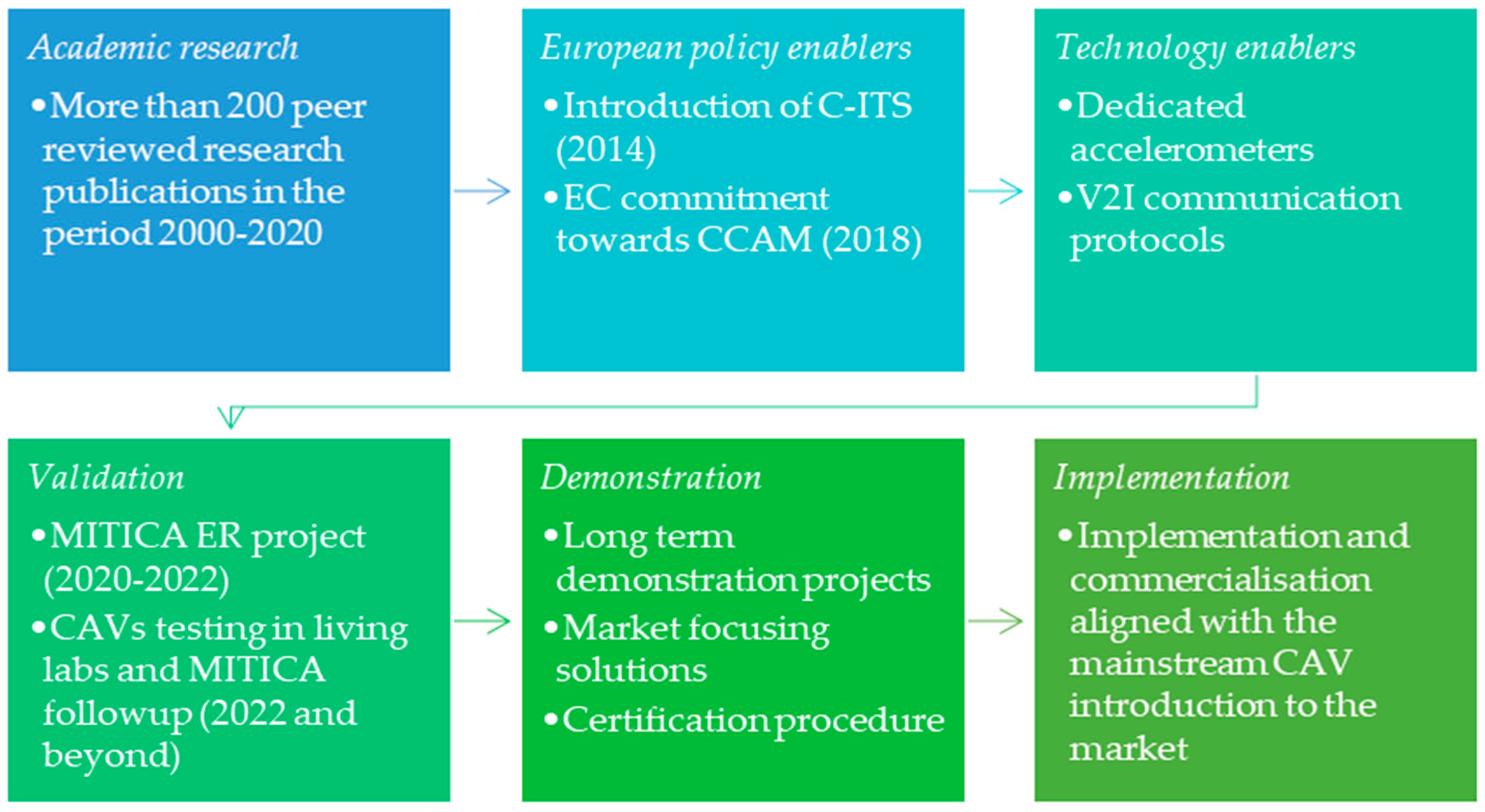
- The link between research, demonstration, and implementation is weak. Much research is limited to specific case studies, while the path is long for large-scale implementation, something that would require additional efforts in other aspects (e.g., certification).
- In line with the above, there is a need for full-scale testing of iSHM.
3. The Way Forward for iSHM Using CAVs
- the dynamic properties of the monitored structure and the moving vehicle;
- the road roughness profile;
- the influence of environmental, temperature, and noise effects.
4. Discussion and Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Glossary
| 5G | Fifth-generation mobile networks |
| 5G PPP | 5G Infrastructure Public Private Partnership |
| ABS | Abstract |
| ACC | Adaptive Cruise Control |
| AI | Artificial Intelligence |
| Ar | Article |
| AV | Autonomous Vehicle |
| BMS | Bridge Management System |
| CCAM | Cooperative, connected, and automated mobility |
| C-ITS | Cooperative Intelligent Transport Systems |
| COMP | Computer science |
| DSM | Digital Single Market |
| EC | European Commission |
| EDPB | European Data Protection Board |
| ENEA | Italian National Agency for New Technologies, Energy and Sustainable Economic Development |
| ENGI | Engineering |
| EU | European Union |
| FE | Finite Element |
| FEM | Finite Element Method |
| GDPR | General Data Protection Regulation |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| H2020 | Horizon 2020 Framework Programme for Research and Innovation |
| ISAD | Infrastructure Support Levels for Automated Driving |
| ITS | Intelligent Transport Systems |
| JRC | Joint Research Centre |
| MITICA | MonItoring Transport Infrastructures with Connected and Automated vehicles |
| MS | Member State |
| PPP | Public Private Partnership |
| Re | Review |
| R&I | Research and Innovation |
| SAE | Society of Automotive Engineers |
| SAR | Synthetic Aperture Radar |
| SHM | Structural Health Monitoring |
| SUBJAREA | Subject Area |
| TLS | Terrestrial Laser Scanners |
| iSHM | Indirect Structural Health Monitoring |
| TEN-T | Trans-European Transport Network |
| UAV | Unmanned Aerial Vehicle |
| UNECE | United Nations Economic Commission for Europe |
| V2I | Vehicle to infrastructure |
| V2V | Vehicle to vehicle |
| VANET | Vehicular Ad hoc Network |
| VBI | Vehicle‒bridge interaction |
References
- CEDR. 2020–01 Trans-European Road Network TEN-T (Roads) 2019 Performance Report. Available online: https://www.cedr.eu/download/Publications/2020/CEDR-Technical-Report-2020-01-TEN-T-2019-Performance-Report.pdf (accessed on 15 February 2021).
- BRIME. Deliverable D14 Final Report. 2001. Available online: https://trimis.ec.europa.eu/sites/default/files/project/documents/brimerep.pdf (accessed on 15 February 2021).
- Marzahn, G. Requirements for the Safety Management of Bridges in Europe: Results of the Preliminary Country Query. European Bridge Forum, 9 July 2020. Available online: https://bmvi-eu2020.de/european-bridge-forum/downloads/ (accessed on 15 February 2021).
- Maurey, H.; Chaize, P.; Dagbert, M. Sécurité des Ponts: Éviter un Drame Rapport D’information (in French) 2019. Available online: https://www.senat.fr/rap/r18-609/r18-6091.pdf (accessed on 15 February 2021).
- Dianeosis. Bridges and Infrastructures in Greece. 2019. Available online: https://www.dianeosis.org/2019/09/gefyres/ (accessed on 15 February 2021). (In Greek).
- Gkoumas, K.; Marques Dos Santos, F.L.; van Balen, M.; Tsakalidis, A.; Ortega Hortelano, A.; Grosso, M.; Haq, G.; Pekár, F. Research and Innovation in Bridge Maintenance, Inspection and Monitoring—A European Perspective Based on the Transport Research and Innovation Monitoring and Information System (TRIMIS), EUR 29650 EN; Publications Office of the European Union: Luxembourg, 2019; ISBN 978-92-79-99679-5. JRC115319. [Google Scholar] [CrossRef]
- Clemente, P. Monitoring and evaluation of bridges: Lessons from the Polcevera Viaduct collapse in Italy. J. Civ. Struct. Health Monit. 2020, 10, 177–182. [Google Scholar] [CrossRef]
- Calvi, G.M.; Moratti, M.; O’Reilly, G.J.; Scattarreggia, N.; Monteiro, R.; Malomo, D.; Calvi, P.M.; Pinho, R. Once upon a Time in Italy: The Tale of the Morandi Bridge. Struct. Eng. Int. 2019, 29, 198–217. [Google Scholar] [CrossRef]
- Ministero Delle Infrastrutture e dei Trasporti. Linee Guida per la Classificazione e Gestione del Rischio, la Valutazione Della Sicurezza ed il Monitoraggio dei Ponti Esistenti. 2020. Available online: http://www.mit.gov.it/sites/default/files/media/notizia/2020-05/1_Testo_Linee_Guida_ponti.pdf (accessed on 15 February 2021). (In Italian)
- European Commission. Directorate-General for Internal Market, Industry, Entrepreneurship and SMEs. In Discussion Paper: State of Infrastructure Maintenance; Brussels, Belgium, 2019; Available online: https://ec.europa.eu/docsroom/documents/34561 (accessed on 15 February 2021).
- Brownjohn, J.M.W. Structural health monitoring of civil infrastructure. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2006, 365, 589–622. [Google Scholar] [CrossRef] [Green Version]
- Lynch, J.P.; Loh, K.J. A summary review of wireless sensors and sensor networks for structural health monitoring. Shock Vibrat Digest 2006, 38, 91–128. [Google Scholar] [CrossRef] [Green Version]
- Lynch, J.P. An overview of wireless structural health monitoring for civil structures. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2006, 365, 345–372. [Google Scholar] [CrossRef]
- Nagayama, T.; Spencer, B.F.J. Structural Health Monitoring Using Smart Sensors. Report No NSEL-001 Newmark Structural Engineering Laboratory University of Illinois at Urbana-Champaign, 186. 2007. Available online: https://www.ideals.illinois.edu/handle/2142/3521 (accessed on 15 February 2021).
- Malekjafarian, A.; McGetrick, P.J.; Obrien, E.J. A Review of Indirect Bridge Monitoring Using Passing Vehicles. Shock. Vib. 2015, 2015, 286139. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Law, S. Structural Health Monitoring Based on Vehicle-Bridge Interaction: Accomplishments and Challenges. Adv. Struct. Eng. 2015, 18, 1999–2015. [Google Scholar] [CrossRef]
- Yang, Y.-B.; Yau, J.-D. Vehicle-Bridge Interaction Element for Dynamic Analysis. J. Struct. Eng. 1997, 123, 1512–1518. [Google Scholar] [CrossRef]
- Yang, Y.-B.; Li, Y.; Chang, K. Constructing the mode shapes of a bridge from a passing vehicle: A theoretical study. Smart Struct. Syst. 2014, 13, 797–819. [Google Scholar] [CrossRef]
- Yang, Y.-B.; Lin, C.; Yau, J. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Matarazzo, T.J.; Santi, P.; Pakzad, S.N.; Carter, K.; Ratti, C.; Moaveni, B.; Osgood, C.; Jacob, N. Crowdsensing Framework for Monitoring Bridge Vibrations Using Moving Smartphones. Proc. IEEE 2018, 106, 577–593. [Google Scholar] [CrossRef]
- Matarazzo, T.; Vazifeh, M.; Pakzad, S.; Santi, P.; Ratti, C. Smartphone data streams for bridge health monitoring. Procedia Eng. 2017, 199, 966–971. [Google Scholar] [CrossRef]
- Rashidi, M.; Mohammadi, M.; Kivi, S.S.; Abdolvand, M.M.; Truong-Hong, L.; Samali, B. A Decade of Modern Bridge Monitoring Using Terrestrial Laser Scanning: Review and Future Directions. Remote Sens. 2020, 12, 3796. [Google Scholar] [CrossRef]
- Zollini, S.; Alicandro, M.; Dominici, D.; Quaresima, R.; Giallonardo, M. UAV Photogrammetry for Concrete Bridge Inspection Using Object-Based Image Analysis (OBIA). Remote Sens. 2020, 12, 3180. [Google Scholar] [CrossRef]
- Biondi, F.; Addabbo, P.; Ullo, S.L.; Clemente, C.; Orlando, D. Perspectives on the Structural Health Monitoring of Bridges by Synthetic Aperture Radar. Remote Sens. 2020, 12, 3852. [Google Scholar] [CrossRef]
- Dong, C.-Z.; Catbas, F.N. A review of computer vision–based structural health monitoring at local and global levels. Struct. Health Monit. 2020. [Google Scholar] [CrossRef]
- Zona, A. Vision-Based Vibration Monitoring of Structures and Infrastructures: An Overview of Recent Applications. Infrastructures 2020, 6, 4. [Google Scholar] [CrossRef]
- Soilán, M.; Sánchez-Rodríguez, A.; Del Río-Barral, P.; Perez-Collazo, C.; Arias, P.; Riveiro, B. Review of Laser Scanning Technologies and Their Applications for Road and Railway Infrastructure Monitoring. Infrastructures 2019, 4, 58. [Google Scholar] [CrossRef] [Green Version]
- Rosique, F.; Navarro, P.J.; Fernández, C.; Padilla, A. A Systematic Review of Perception System and Simulators for Autonomous Vehicles Research. Sensors 2019, 19, 648. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- European Commission. Regulation (EU) 2016/679 of the European Parliament and of the Council of 27 April 2016 on the Protection of Natural Persons with Regard to the Processing of Personal Data and on the Free Movement of Such Data, and Repealing Directive 95/46/EC (General Data Protection Regulation). 2016. Available online: https://eur-lex.europa.eu/eli/reg/2016/679/oj (accessed on 15 February 2021).
- Costantini, F.; Thomopoulos, N.; Steibel, F.; Curl, A.; Lugano, G.; Kováčiková, T. Chapter Eight—Autonomous vehicles in a GDPR era: An international comparison. In Policy Implications of Autonomous Vehicles; Milakis, D., Thomopoulos, N., van Wee, B.B.T.-A., Eds.; Cambridge, MA, USA, 2020; Volume 5, pp. 191–213. ISBN 2543-0009. [Google Scholar]
- Aktan, A.E.; Chase, S.; Inman, D.; Pines, D.D. Monitoring and Managing the Health of Infrastructure Systems, Health Monitoring and Management of Civil Infrastructure Systems; Chase, S.B., Aktan, A.E., Eds.; SPIE: Bellingham, WA, USA, 2001; Volume 4337. [Google Scholar]
- Gkoktsi, K.; Giaralis, A. A multi-sensor sub-Nyquist power spectrum blind sampling approach for low-power wireless sensors in operational modal analysis applications. Mech. Syst. Signal Process. 2019, 116, 879–899. [Google Scholar] [CrossRef]
- Gao, Y.; Spencer, B. Structural Health Monitoring Strategies for Smart Sensor Networks; NSEL Report Series. Report No. NSEL-011; Newmark Structural Engineering Laboratory, University of Illinois at Urbana-Champaign: Urbana, IL, USA, 2008. [Google Scholar]
- Ou, J.; Li, H. Structural Health Monitoring in mainland China: Review and Future Trends. Struct. Health Monit. 2010, 9, 219–231. [Google Scholar] [CrossRef]
- Ko, J.; Ni, Y. Technology developments in structural health monitoring of large-scale bridges. Eng. Struct. 2005, 27, 1715–1725. [Google Scholar] [CrossRef]
- An, Y.; Chatzi, E.; Sim, S.; Laflamme, S.; Blachowski, B.; Ou, J. Recent progress and future trends on damage identification methods for bridge structures. Struct. Control. Health Monit. 2019, 26, e2416. [Google Scholar] [CrossRef]
- Achillopoulou, D.V.; Mitoulis, S.A.; Argyroudis, S.A.; Wang, Y. Monitoring of transport infrastructure exposed to multiple hazards: A roadmap for building resilience. Sci. Total. Environ. 2020, 746, 141001. [Google Scholar] [CrossRef]
- Muttoni, A. Some Innovative Prestressed Concrete Structures in Switzerland. In Proceedings of the Keynote Lecture at the 23rd Symposium on Developments in Prestressed Concrete, Japan Prestressed Concrete Institute, Morioka, Japan, 23–24 October 2014. [Google Scholar]
- Bentur, A.; Berke, N.; Diamond, S. Steel Corrosion in Concrete- Fundamentals and Civil Engineering Practice; Taylor & Francis Ltd.: London, UK, 2019; p. 208. [Google Scholar]
- Bonopera, M.; Chang, K.-C.; Lee, Z.-K. State-of-the-Art Review on Determining Prestress Losses in Prestressed Concrete Girders. Appl. Sci. 2020, 10, 7257. [Google Scholar] [CrossRef]
- Alonso Raposo, M.; Ciuffo, B.; Ardente, F.; Aurambout, J.-P.; Baldini, G.; Braun, R.; Christidis, P.; Christodoulou, A.; Duboz, A.; Felici, S.; et al. The Future of Road Transport—Implications of Automated, Connected, Low-Carbon and Shared Mobility, EUR 29748 EN; Publications Office of the European Union: Luxembourg, 2019; ISBN 978-92-76-03409-4. [Google Scholar] [CrossRef]
- SAE. J3016 Standards. 2019. Available online: https://www.sae.org/standards/content/j3016_201806/ (accessed on 15 February 2021).
- ERTRAC. Connected Automated Driving Roadmap—Version 8. 2019. Available online: https://www.ertrac.org/uploads/documentsearch/id57/ERTRAC-CAD-Roadmap-2019.pdf (accessed on 15 February 2021).
- European Commission. EU and EEA Member States Sign up for Cross Border Experiments on Cooperative, Connected and Automated Mobility. 2017. Available online: https://ec.europa.eu/digital-single-market/en/news/eu-and-eea-member-states-sign-cross-border-experiments-cooperative-connected-and-automated (accessed on 15 February 2021).
- European Commission. Cross-Border Corridors for Connected and Automated Mobility (CAM). 2020. Available online: https://ec.europa.eu/digital-single-market/en/cross-border-corridors-connected-and-automated-mobility-cam (accessed on 15 February 2021).
- European Commission. Europe on the Move—Sustainable Mobility for Europe: Safe, Connected, and Clean COM/2018/0293 Final; European Commission: Brussels, Belgium, 2018. [Google Scholar]
- European Commission. Europe on the Move—On the Road to Automated Mobility: An EU Strategy for Mobility of the Future COM/2018/283 Final; European Commission: Brussels, Belgium, 2018. [Google Scholar]
- European Parliament; Council of the European Union. Directive 2010/40/EU of the European Parliament and of the Council of 7 July 2010 on the Framework for the Deployment of Intelligent Transport Systems in the Field of Road Transport and for Interfaces with Other Modes of Transport Text with EEA Relevance; Publications Office of the European Union: Luxemburg, 2010.
- European Commission. C-ITS Platform: Final Report Phase II. C-ITS Platform. Available online: https://ec.europa.eu/transport/sites/transport/files/2017-09-c-its-platform-final-report.pdf (accessed on 15 February 2021).
- European Commision. A European Strategy on Cooperative Intelligent Transport Systems, a Milestone Towards Cooperative, Connected and Automated Mobility. COM (2016) 766 Final; European Commission: Brussels, Belgium, 2016. [Google Scholar]
- Lu, M.; Türetken, O.; Adali, O.E.; Castells, J.; Blokpoel, R.; Grefen, P.W.P.J. C-ITS (Cooperative Intelligent Transport Systems) deployment in Europe—challenges and key findings. In Proceedings of the 25th ITS World Congress, Copenhagen, Denmark, 17–21 September 2018. Paper ID EU-TP1076. [Google Scholar]
- Lu, M.; Castells, J.; Hofman, P.; Blokpoel, R.; Vallejo, A. Pan-European deployment of C-ITS: The way forward. In Proceedings of the 26th World Congress on Intelligent Transport Systems, Singapore, 21–25 October 2019. [Google Scholar]
- European Commission. Commission Delegated Regulation (EU) of 13.3.2019 Supplementing Directive 2010/40/EU of the European Parliament and of the Council with Regard to the Deployment and Operational Use of Cooperative Intelligent Transport Systems C/2019/1789 Final; European Commission: Brussels, Belgium, 2019. [Google Scholar]
- Council of the European Union. Commission Delegated Regulation (EU) of 13.3.2019 Supplementing Directive 2010/40/EU of the European Parliament and of the Council with Regard to the Deployment and Operational Use of Cooperative Intelligent Transport Systems—Decision to Raise Objections to the Delegated act ST 10471 2019 INIT; Council of the European Union: Brussels, Belgium, 2019.
- Amditis, A.; Lytrivis, P.; Papanikolaou, E.; Carreras, A.; Daura, X. Road infrastructure taxonomy for connected and automated driving. Coop. Intell. Transp. Syst. Towards High Level Autom. Driv. 2019, 14, 309–325. [Google Scholar] [CrossRef]
- Sony, S.; Laventure, S.; Sadhu, A. A literature review of next-generation smart sensing technology in structural health moni-toring. Struct. Control Health Monit. 2019, 26, e2321. [Google Scholar] [CrossRef]
- Shokravi, H.; Shokravi, H.; Bakhary, N.; Heidarrezaei, M.; Koloor, S.S.R.; Petrů, M. Vehicle-Assisted Techniques for Health Monitoring of Bridges. Sensors 2020, 20, 3460. [Google Scholar] [CrossRef]
- Elhattab, A.; Uddin, N.; OBrien, E. Extraction of Bridge Fundamental Frequencies Utilizing a Smartphone MEMS Accelerom-eter. Sensors 2019, 19, 3143. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Botte, M.; Pariota, L.; D’Acierno, L.; Bifulco, G.N. An Overview of Cooperative Driving in the European Union: Policies and Practices. Electronics 2019, 8, 616. [Google Scholar] [CrossRef] [Green Version]
- Keenahan, J.; O’Brien, E.J.; McGetrick, P.J.; Gonzalez, A. The use of a dynamic truck–trailer drive-by system to monitor bridge damping. Struct. Health Monit. 2013, 13, 143–157. [Google Scholar] [CrossRef] [Green Version]
- Li, W.-M.; Jiang, Z.-H.; Wang, T.-L.; Zhu, H.-P. Optimization method based on Generalized Pattern Search Algorithm to identify bridge parameters indirectly by a passing vehicle. J. Sound Vib. 2014, 333, 364–380. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Obrien, E. Identification of bridge mode shapes using Short Time Frequency Domain Decomposition of the responses measured in a passing vehicle. Eng. Struct. 2014, 81, 386–397. [Google Scholar] [CrossRef] [Green Version]
- Obrien, E.; McGetrick, P.; Gonzalez, A. A drive-by inspection system via vehicle moving force identification. Smart Struct. Syst. 2014, 13, 821–848. [Google Scholar] [CrossRef] [Green Version]
- Hester, D.; Gonzalez, A. A bridge-monitoring tool based on bridge and vehicle accelerations. Struct. Infrastruct. Eng. 2015, 11, 619–637. [Google Scholar] [CrossRef] [Green Version]
- Elhattab, A.; Uddin, N.; Obrien, E. Drive-by bridge damage monitoring using Bridge Displacement Profile Difference. J. Civ. Struct. Health Monit. 2016, 6, 839–850. [Google Scholar] [CrossRef]
- Obrien, E.J.; Martinez, D.; Malekjafarian, A.; Sevillano, E. Damage detection using curvatures obtained from vehicle meas-urements. J. Civ. Struct. Health Monit. 2017, 7, 333–341. [Google Scholar] [CrossRef] [Green Version]
- Tan, C.; Elhattab, A.; Uddin, N. “Drive-by’’ bridge frequency-based monitoring utilizing wavelet transform. J. Civ. Struct. Health Monit. 2017, 7, 615–625. [Google Scholar] [CrossRef]
- Hester, D.; González, A. A discussion on the merits and limitations of using drive-by monitoring to detect localised damage in a bridge. Mech. Syst. Signal Process. 2017, 90, 234–253. [Google Scholar] [CrossRef] [Green Version]
- Keenahan, J.C.; Obrien, E.J. Drive-by damage detection with a TSD and time-shifted curvature. J. Civ. Struct. Health Monit. 2018, 8, 383–394. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Golpayegani, F.; Moloney, C.; Clarke, S. A Machine Learning Approach to Bridge-Damage Detection Using Responses Measured on a Passing Vehicle. Sensors 2019, 19, 4035. [Google Scholar] [CrossRef] [Green Version]
- Locke, W.; Sybrandt, J.; Redmond, L.; Safro, I.; Atamturktur, S. Using drive-by health monitoring to detect bridge damage considering environmental and operational effects. J. Sound Vib. 2020, 468, 115088. [Google Scholar] [CrossRef]
- Nayek, R.; Narasimhan, S. Extraction of contact-point response in indirect bridge health monitoring using an input estimation approach. J. Civ. Struct. Health Monit. 2020, 10, 815–831. [Google Scholar] [CrossRef]
- Tan, C.; Elhattab, A.; Uddin, N. Wavelet-Entropy Approach for Detection of Bridge Damages Using Direct and Indirect Bridge Records. J. Infrastruct. Syst. 2020, 26, 04020037. [Google Scholar] [CrossRef]
- Tan, C.; Uddin, N. Hilbert transform based approach to improve extraction of “drive-by” bridge frequency. Smart Struct Syst. 2020, 25, 265–277. [Google Scholar]
- Jian, X.; Xia, Y.; Sun, L. An indirect method for bridge mode shapes identification based on wavelet analysis. Struct. Control. Health Monit. 2020, 27, e2630. [Google Scholar] [CrossRef]
- Krishnanunni, C.G.; Rao, B.N. Indirect health monitoring of bridges using Tikhonov regularization scheme and signal averaging technique. Struct. Control Health Monit. 2021, 28, e2686. [Google Scholar] [CrossRef]
- Cerda, F.; Chen, S.; Bielak, J.; Garrett, J.H.; Rizzo, P.; Kovacevic, J. Indirect structural health monitoring of a simplified laboratory-scale bridge model. Smart Struct. Syst. 2014, 13, 849–868. [Google Scholar] [CrossRef]
- Kim, C.W.; Chang, K.C.; McGetrick, P.J.; Inoue, S.; Hasegawa, S. Utilizing moving vehicles as sensors for bridge condition screening-A laboratory verification. Sens. Mater. 2017, 29, 153–163. [Google Scholar]
- Shirzad-Ghaleroudkhani, N.; Mei, Q.; Gül, M. Frequency Identification of Bridges Using Smartphones on Vehicles with Vari-able Features. J. Bridg. Eng. 2020, 25, 04020041. [Google Scholar] [CrossRef]
- Shirzad-Ghaleroudkhani, N.; Gül, M. Inverse Filtering for Frequency Identification of Bridges Using Smartphones in Passing Vehicles: Fundamental Developments and Laboratory Verifications. Sensors 2020, 20, 1190. [Google Scholar] [CrossRef] [Green Version]
- McGetrick, P.J.; Hester, D.; Taylor, S.E. Implementation of a drive-by monitoring system for transport infrastructure utilising smartphone technology and GNSS. J. Civ. Struct. Health Monit. 2017, 7, 175–189. [Google Scholar] [CrossRef] [Green Version]
- Kim, C.; Isemoto, R.; McGetrick, P.; Kawatani, M.; Obrien, E. Drive-by bridge inspection from three different approaches. Smart Struct. Syst. 2014, 13, 775–796. [Google Scholar] [CrossRef] [Green Version]
- McGetrick, P.J.; Kim, C.-W.; González, A.; Brien, E.J.O. Experimental validation of a drive-by stiffness identification method for bridge monitoring. Struct. Health Monit. 2015, 14, 317–331. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Zhu, X.; Law, S.-S.; Samali, B. Indirect bridge modal parameters identification with one stationary and one moving sen-sors and stochastic subspace identification. J. Sound Vib. 2019, 446, 1–21. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M.; Boay, M. Indirect health monitoring of bridges using Mel-frequency cepstral coefficients and principal com-ponent analysis. Mech. Syst. Signal. Process. 2019, 119, 523–546. [Google Scholar] [CrossRef]
- Tan, C.; Uddin, N.; Obrien, E.J.; McGetrick, P.J.; Kim, C.-W. Extraction of Bridge Modal Parameters Using Passing Vehicle Response. J. Bridg. Eng. 2019, 24, 04019087. [Google Scholar] [CrossRef]
- Liu, J.; Chen, S.; Bergés, M.; Bielak, J.; Garrett, J.H.; Kovačević, J.; Noh, H.Y. Diagnosis algorithms for indirect structural health monitoring of a bridge model via dimensionality reduction. Mech. Syst. Signal Process. 2020, 136, 106454. [Google Scholar] [CrossRef]
- Sitton, J.D.; Rajan, D.; Story, B.A. Bridge frequency estimation strategies using smartphones. J. Civ. Struct. Health Monit. 2020, 10, 513–526. [Google Scholar] [CrossRef]
- Tan, C.; Zhao, H.; Obrien, E.J.; Uddin, N.; Fitzgerald, P.C.; McGetrick, P.J.; Kim, C.-W. Extracting mode shapes from drive-by measurements to detect global and local damage in bridges. Struct. Infrastruct. Eng. 2020, 1–15. [Google Scholar] [CrossRef]
- Li, J.; Zhu, X.; Law, S.-S.; Samali, B. A Two-Step Drive-by Bridge Damage Detection Using Dual Kalman Filter. Int. J. Struct. Stab. Dyn. 2020, 20, 2042006. [Google Scholar] [CrossRef]
- Lin, C.; Yang, Y. Use of a passing vehicle to scan the fundamental bridge frequencies: An experimental verification. Eng. Struct. 2005, 27, 1865–1878. [Google Scholar] [CrossRef]
- Elhattab, A.; Uddin, N.; Obrien, E. Drive-By Bridge Frequency Identification under Operational Roadway Speeds Employing Frequency Independent Underdamped Pinning Stochastic Resonance (FI-UPSR). Sensors 2018, 18, 4207. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.F.; Pan, J.C.; Zhang, J.T.; Ye, G.R.; Xu, R.Q. Vehicle–bridge interaction analysis by the state-space method and symplectic orthogonality. Arch. Appl. Mech. 2019, 90, 533–557. [Google Scholar] [CrossRef]
- Makridis, M.; Mattas, K.; Ciuffo, B. Response Time and Time Headway of an Adaptive Cruise Control. An Empirical Characterization and Potential Impacts on Road Capacity. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1677–1686. [Google Scholar] [CrossRef]
- Makridis, M.; Mattas, K.; Ciuffo, B.; Re, F.; Kriston, A.; Minarini, F.; Rognelund, G. Empirical Study on the Properties of Adaptive Cruise Control Systems and Their Impact on Traffic Flow and String Stability. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 471–484. [Google Scholar] [CrossRef] [Green Version]
- Makridis, M.; Mattas, K.; Anesiadou, A.; Ciuffo, B. OpenACC. An open database of car-following experiments to study the properties of commercial ACC systems. Transp. Res. Part C Emerg. Technol. 2021, 125, 103047. [Google Scholar] [CrossRef]
- European Commission—CORDIS. SHared Automation Operating Models for Worldwide Adoption. 2020. Available online: https://cordis.europa.eu/project/id/875530 (accessed on 15 February 2021).
- European Commission. Pilot Living Labs at the JRC. 2019. Available online: https://ec.europa.eu/jrc/en/research-facility/living-labs-at-the-jrc (accessed on 15 February 2021).
- United Nations. Revised Framework Document on Automated/Autonomous Vehicles; Economic and Social Council ECE/TRANS/WP.29/2019/34/Rev.1; United Nations: Geneva, Switzerland, 2019. [Google Scholar]
- Galassi, M.C.; Lagrange, A. New Approaches for Automated Vehicles Certification: Part I—Current and Upcoming Methods for Safety Assessment; Tsakalidis, A., Ed.; EUR 30087 EN; Publications Office of the European Union: Luxembourg, 2020; ISBN 978-92-76-10720-0. [Google Scholar] [CrossRef]
- European Commission. Commission Decision of 11.12.2018 Updating the Working Programme in Relation to the Actions Under Article 6(3) of Directive 2010/40/EU, Brussels, 11.12.2018, C(2018) 8264 Final; European Commission: Brussels, Belgium, 2018. [Google Scholar]
- European Data Protection Board. EDPB Letter to DG Move Regarding C-ITS. 2019. Available online: https://edpb.europa.eu/sites/edpb/files/files/file1/edpb_letter_c-its_20190605_en.pdf (accessed on 20 February 2021).
- European Commission. Sustainable and Smart Mobility Strategy—Putting European Transport on Track for the Future SWD/2020/331 Final; European Commission: Brussels, Belgium, 2020. [Google Scholar]
- European Commission. Commission Work Programme 2020 A Union That Strives for More COM/2020/37 Final; European Commission: Brussels, Belgium, 2020. [Google Scholar]
- European Commission. A European strategy for data. In COM/2020/66 Final; European Commission: Brussels, Belgium, 2020. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scientific Research Analysis | |
|---|---|
| Data origin | Scopus dataset |
| Timeframe | Documents as of January 2021 |
| Search type | Text search on title, abstract, and keywords |
| Filtering | Manual check and validation of the results based on the abstracts and, when necessary, on the full papers |
| Detailed analysis | Thorough analysis of full-text articles and clustering under 29 topics and subtopics |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gkoumas, K.; Gkoktsi, K.; Bono, F.; Galassi, M.C.; Tirelli, D. The Way Forward for Indirect Structural Health Monitoring (iSHM) Using Connected and Automated Vehicles in Europe. Infrastructures 2021, 6, 43. https://doi.org/10.3390/infrastructures6030043
Gkoumas K, Gkoktsi K, Bono F, Galassi MC, Tirelli D. The Way Forward for Indirect Structural Health Monitoring (iSHM) Using Connected and Automated Vehicles in Europe. Infrastructures. 2021; 6(3):43. https://doi.org/10.3390/infrastructures6030043
Chicago/Turabian StyleGkoumas, Konstantinos, Kyriaki Gkoktsi, Flavio Bono, Maria Cristina Galassi, and Daniel Tirelli. 2021. "The Way Forward for Indirect Structural Health Monitoring (iSHM) Using Connected and Automated Vehicles in Europe" Infrastructures 6, no. 3: 43. https://doi.org/10.3390/infrastructures6030043