Augmented Aircraft Performance with the Use of Morphing Technology for a Turboprop Regional Aircraft Wing

Abstract
1. Introduction: The Different Uses of Morphing Technology for Aerodynamic Performance Enhancement
1.1. Use of Morphing Technology for Flight Control
1.2. Use of Morphing Technology for Adaptation to Flight Conditions
1.3. Use of Morphing Technology for Performance Improvements at off Design Conditions
1.4. Use of Morphing Technology at Low-Speed
2. Design of the Regional Aircraft AG2-NLF Wing
2.1. Aircraft Configuration
2.2. Numerical Methods Used
2.3. AG2-NLF Wing Design
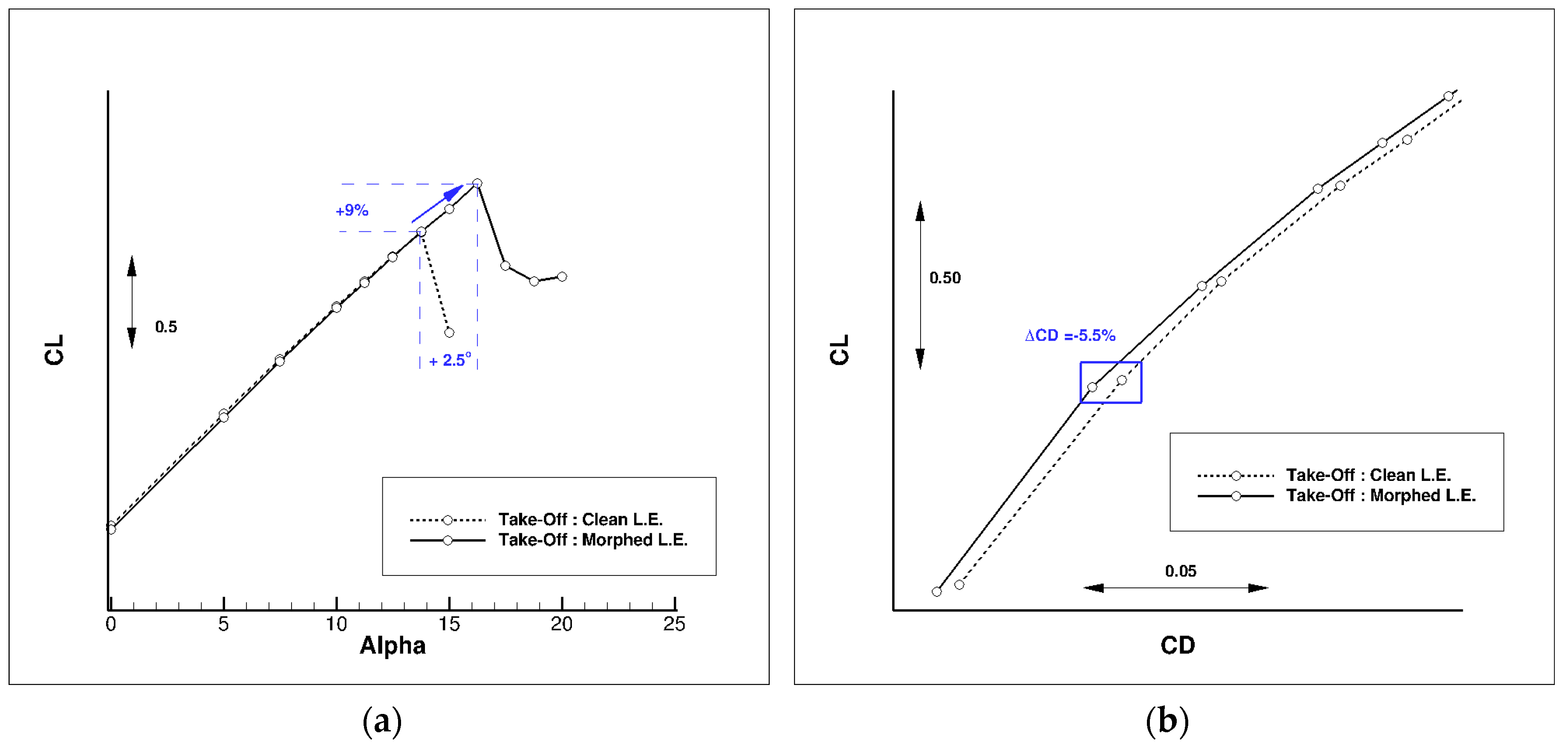
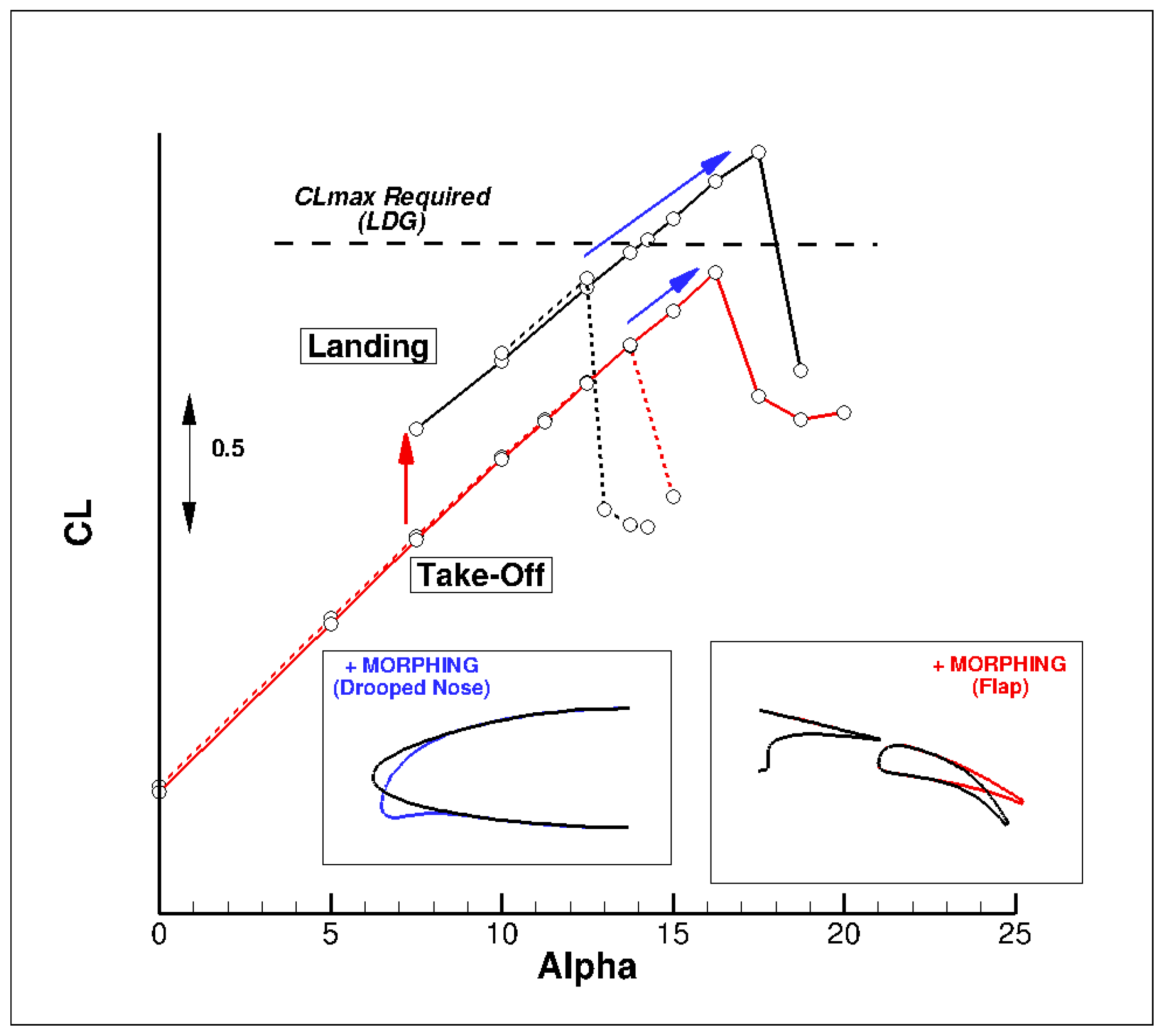
3. Leading Edge Device: Use of a Morphed Droop Nose
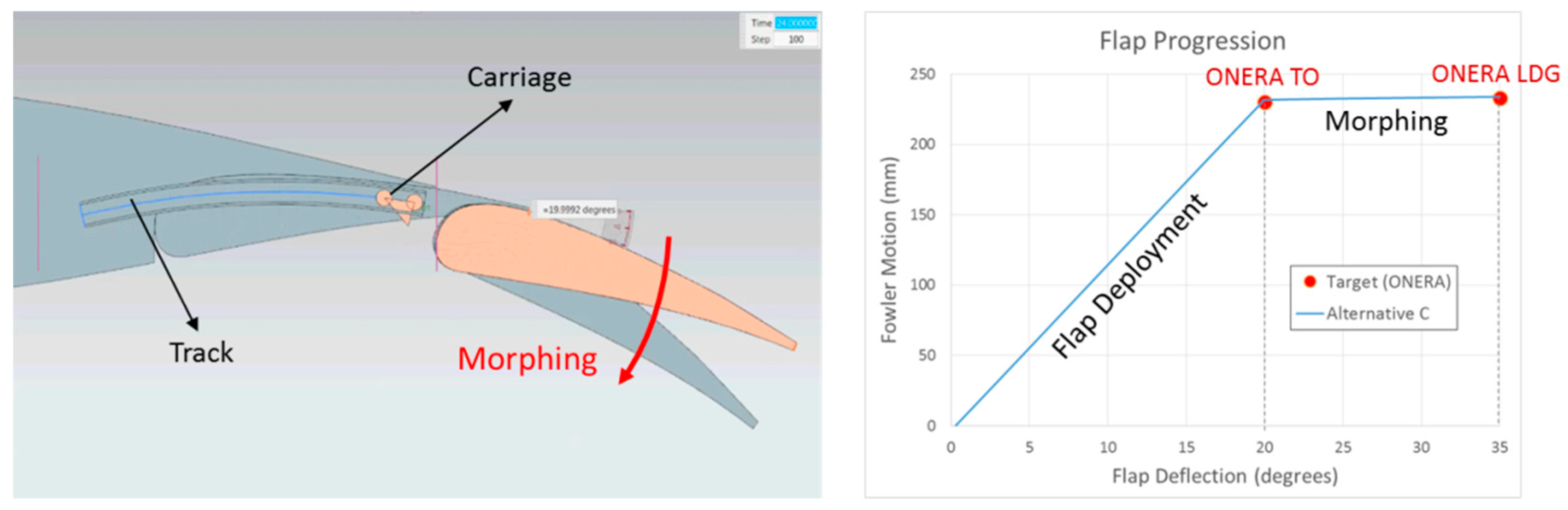
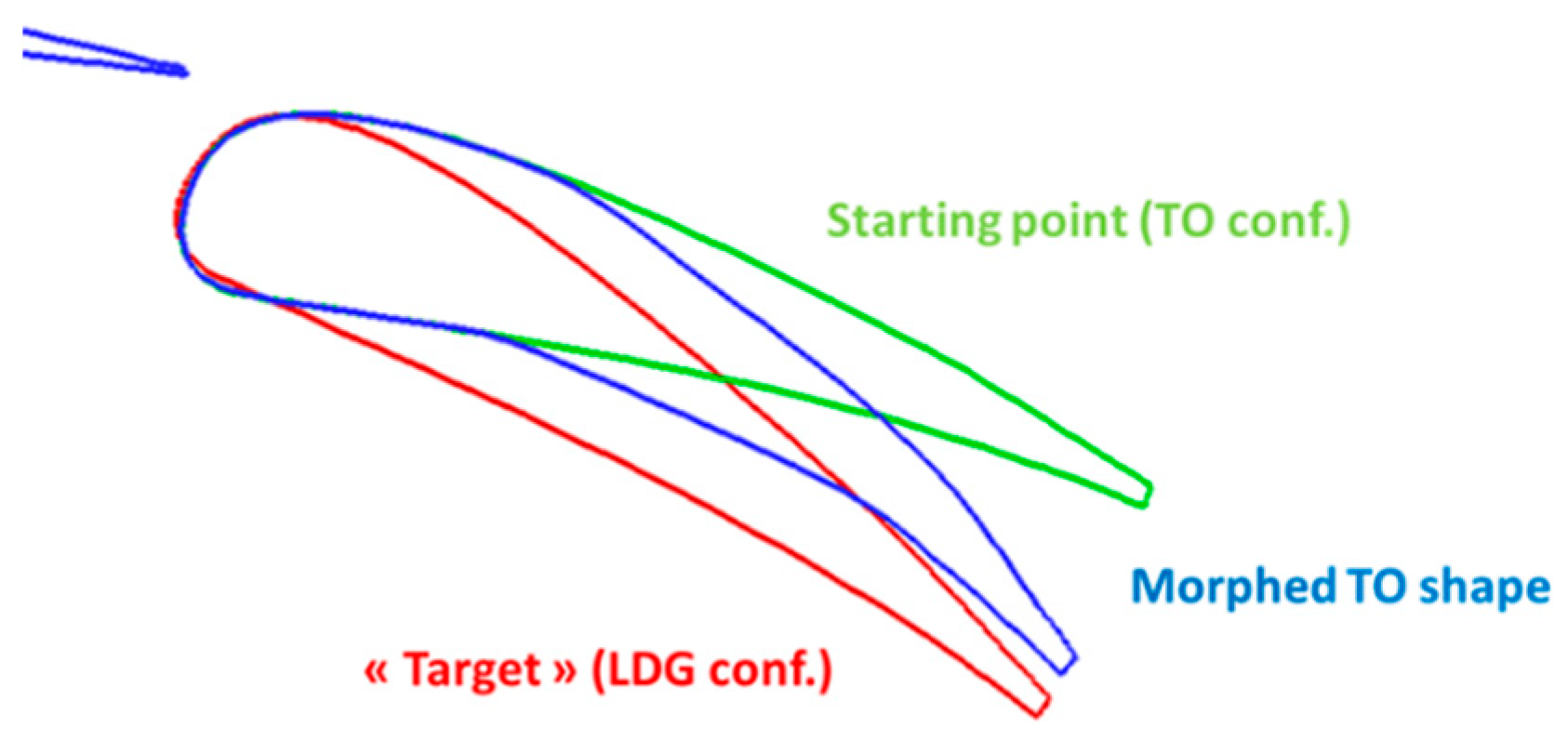
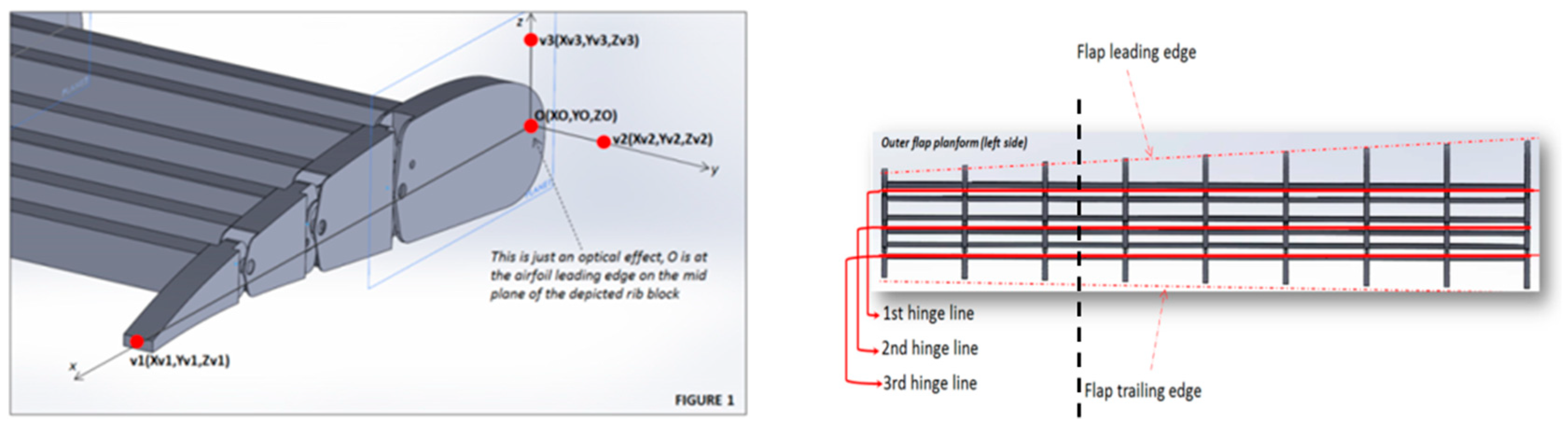
4. Trailing Edge Device: Use of a Multi-Segmented Flap System
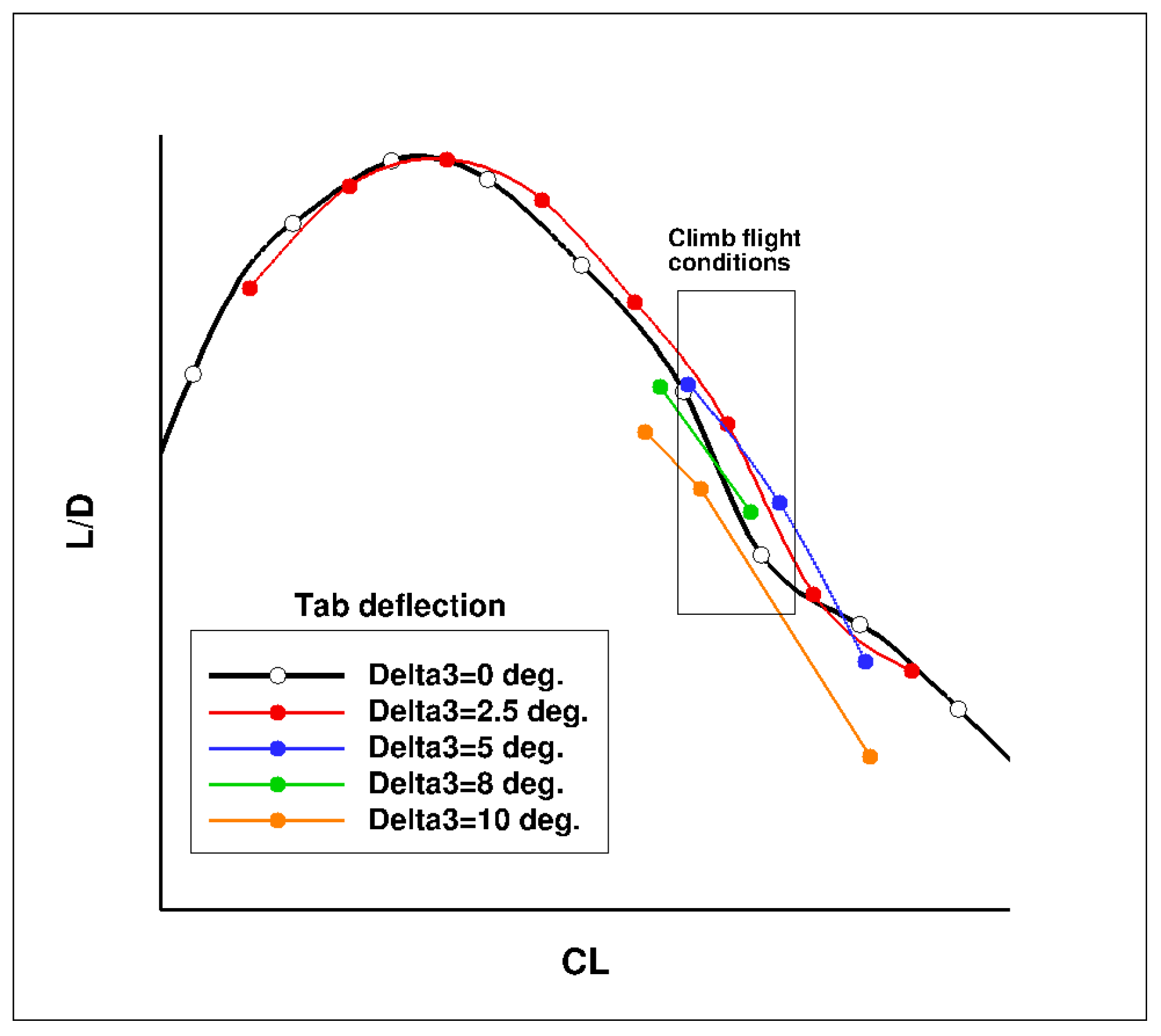
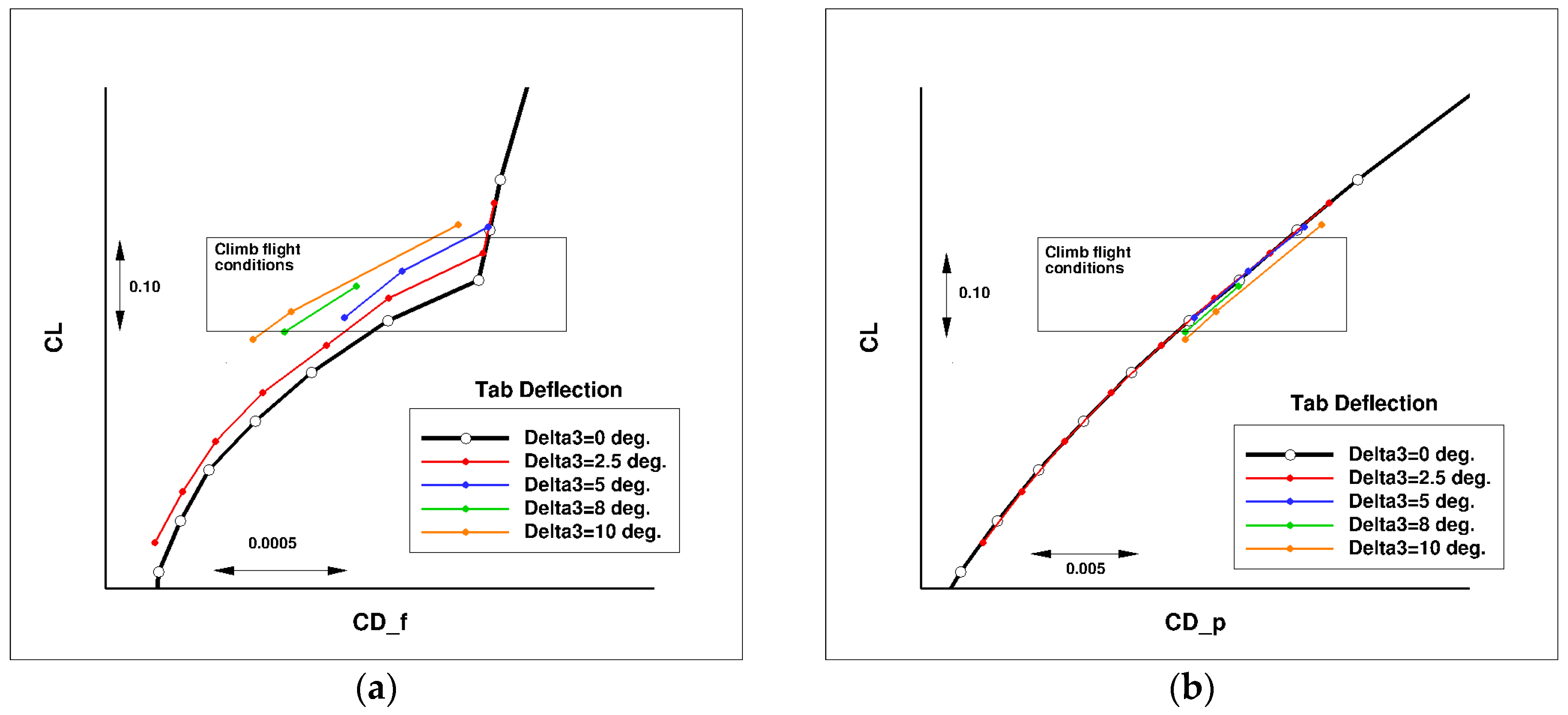
5. Use of the Flap Morphing System for Performance Improvement in Climb Conditions
6. Conclusions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CL | Lift coefficient |
| CD | Drag coefficient |
| CD_f | Friction drag coefficient |
| CD_p | Pressure drag coefficient |
| Cp | Pressure coefficient |
| CFD | Computational Fluid Dynamics |
| EU | European Union |
| LoD | Lift over Drag ratio |
| L.E. | Leading Edge |
| T.E. | Trailing Edge |
| DN | Droop Nose |
| TO | Take-off |
| LDG | Landing |
| NLF | Natural Laminar Flow |
| GRA-ITD | Green Regional Aircraft Innovative Technology Demonstrator |
| A/C | Aircraft |
| ACTE | Adaptive Compliant Trailing Edge program |
| AG2 | AIRGREEN 2 program |
| RANS | Reynolds Averaged Navier Stokes |
| AHD | Arnal Habiballah Delcourt criterion |
| AG2-NLF | Regional aircraft of the AIRGREEN2 project equipped with the NLF wing |
| SARISTU | Smart Intelligent Aircraft Structures project |
| CRIAQ | Consortium of Research in the Aerospace Industry in Quebec |
| α | Aircraft incidence |
| Pax | passengers |
| DeltaI | Deflection angle applied at the Ith hinge of the multi-segmented flap system |
| ONERA | Office National d’Etudes et de Recherches Aérospatiales |
| PoliMi | Politecnico di Milano |
| UniNa | University of Naples “Federico II” |
References
- Picture: Design of a Flying Machine (Public Domain). Available online: https://commons.wikimedia.org/wiki/File:Leonardo_Design_for_a_Flying_Machine,_c._1488.jpg (accessed on 2 August 2019).
- Prototype of Clément Ader AVION III. Musée des Arts et Métiers, Paris. (Picture by Roby, CC BY-SA 2.0 be). Available online: https://commons.wikimedia.org/w/index.php?curid=220593 (accessed on 2 August 2019).
- Wright, W.; Wright, O. Flight 41: Orville Flying to the Left at a Height of About 60 Feet; Huffman Prairie, Dayton, Ohio. Dayton Ohio, 1905. [Sept. 29] [Photograph] Retrieved from the Library of Congress. Available online: https://www.loc.gov/item/2001696566/ (accessed on 2 August 2019).
- Picture by Joao Luiz Musa; Marcelo Breda Mourao, Ricardo Tilklan, Public Domain. Available online: https://commons.wikimedia.org/w/index.php?curid=9845344 (accessed on 2 August 2019).
- Three F111 at different swept wing configurations—Picture by Jason Baker (Australia), CC-BY-2.0. Available online: https://c ommons.wikimedia.org/wiki/File:Three_F-111s_with_different_wing_configurations.jpg (accessed on 9 September 2019).
- Smith, S.B.; Nelson, D.W. Determination of the aerodynamic characteristics of the mission adaptive wing. AIAA J. Aircr. 1990, 27, 950–958. [Google Scholar] [CrossRef]
- Pictures. Available online: http://www.nasa.gov/centers/dryden/multimedia/imagegallery/F-111AFTI/EC85-33205-07.html (accessed on 2 August 2019).
- Pictures. Available online: http://www.nasa.gov/centers/dryden/multimedia/imagegallery/F-111AFTI/EC86-33385-002.html (accessed on 2 August 2019).
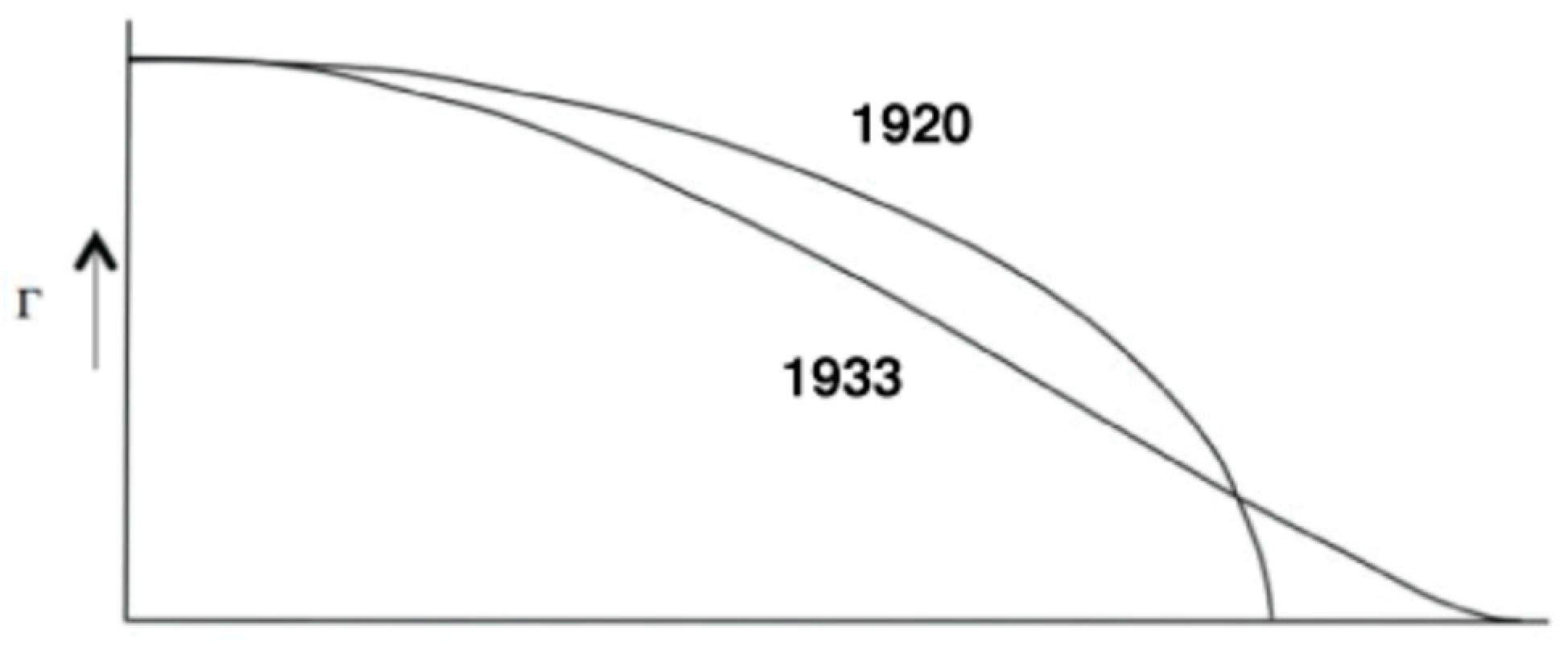
- Bowers, A.H.; Murillo, O.J.; Jensen, R.; Eslinger, B.; Gelzer, C. On Wings of the Minimum Induced Drag: Spanload Implications for Aircraft and Birds; NASA/TP-2016-219072; Armstrong Flight Research Center: Edwards, CA, USA, 2016.
- Hibig, R.; Koerner, H. Aerodynamic Design Trends for Commercial Aircraft; NASA TM-77976; NASA: Washington, DC, USA, 1986.
- Concilio, A.; Dimino, I.; Lecce, L.; Pecora, R. Morphing Wing Technologies. Large Commercial Aircraft and Civil Helicopters; Butterworth-Heinemann: Oxford, UK, 2018. [Google Scholar]
- Fischer, M.; Friedel, H.; Holthusen, H.; Gölling, B.; Emunds, R. Low noise design trends derived from wind tunnel testing on advanced high-lift devices. In Proceedings of the 12th AIAA/CEAS Aeroacoustics Conference (27th AIAA Aeroacoustics Conference), Cambridge, MA, USA, 8–10 May 2006. [Google Scholar]
- Picture: NASA/Ken Ulbrich. Available online: http://www.nasa.gov/sites/default/files/flap_0.jpg (accessed on 9 September 2019) (Public Domain).
- Smith, A.M.O. High-Lift Aerodynamics. AIAA J. Aircr. 1975, 12, 501–530. [Google Scholar] [CrossRef]
- De Gaspari, A.; Moens, F. Aerodynamic Shape Design and Validation of an Advanced High-Lift Device for a Regional Aircraft with Morphing Droop Nose. Hindawi Int. J. Aerosp. Eng. 2019. [Google Scholar] [CrossRef]
- De Gaspari, A.; Gilardelli, A.; Ricci, S.; Airoldi, A.; Moens, F. Design of a Leading Edge Morphing Based on Compliant Structures for a Twin-Prop Regional Aircraft. In Proceedings of the 2018 AIAA/AHS Adaptive Structure Conference, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Drela, M.; Giles, M. Viscous-Inviscid Analysis of Transonic and Low Reynolds Number Airfoils. AIAA J. 1987, 25, 1347–1353. [Google Scholar] [CrossRef]
- Sobieczky, H. Parametric Airfoil and Wings. In Notes on Numerical Fluid Mechanics; Vieweg: Wiesbaden, Germany, 1998; pp. 71–88. [Google Scholar]
- Vanderplaats, G.N. DOT-Design Optimisation Tools Program; Vanderplaats Research and Development: Colorado Springs, CO, USA, 1995. [Google Scholar]
- Cambier, L.; Heib, S.; Plot, S. The Onera elsA CFD Software: Input from Research and Feedback from Industry. Mech. Ind. 2013, 14, 159–174. [Google Scholar] [CrossRef]
- Jameson, A.; Schmidt, W.; Turkel, E. Numerical Solutions of the Euler Equations by Finite Volume Methods Using Runge-Kutta Time Stepping. In Proceedings of the 14th Fluid and Plasma Dynamics Conference, Palo Alto, CA, USA, 23–25 June 1981. [Google Scholar]
- Spalart, P.R. Strategies for Turbulence Modelling and Simulation. Int. J. Heat Fluid Flow 2000, 21, 252–263. [Google Scholar] [CrossRef]
- Menter, F.R. Two-Equation Eddy-Viscosity Turbulence Models for Engineering Applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Moens, F.; Perraud, J.; Krumbein, A.; Toulorge, T.; Iannelli, P.; Hanifi, A. Transition Prediction and Impact on 3D High-Lift Wing Configuration. In Proceedings of the 25th AIAA Applied Aerodynamics Conference, Miami, FL, USA, 25–28 June 2007. [Google Scholar]
- De Gaspari, A.; Gilardelli, A.; Ricci, S.; Airoldi, A.; Moens, F. Design of a Leading Edge Morphing Based on Compliant Structures in the Framework of the CD2-Airgreen2 Project. In Proceedings of the SMASIS 2018 Conference, San Antonio, TX, USA, 10–12 September 2018. [Google Scholar]
- Amedola, G.; Dimino, I.; Magnifico, M.; Pecora, R. Distributed Actuation Concepts for a Morphing Aileron Device. Aeronaut. J. 2016, 120, 1365–1385. [Google Scholar] [CrossRef]
- Rea, F.; Amoroso, F.; Pecora, R.; Moens, F. Exploitation of a Multifonctional Twistable Wing Trailing-Edge for Performance Improvement of a Turboprop 90-Seats Regional Aircraft. Aerospace 2018, 5, 122. [Google Scholar] [CrossRef]
- Allegaert, A.E.Ö.; Lemmens, Y. A Simulation Methodology for the Design of Trailing-Edge Flap Deployment Mechanism. In Proceedings of the CAASE18, Cleveland, OH, USA, 5–7 June 2018. [Google Scholar]
- Öngüt, A.E.; Esposito, M.; Barile, M.; Lemmens, Y. Design of a Novel Trailing-Edge Flap Deployment Mechanism. In Proceedings of the 8th European Aeronautics Days, Bucharest, Romania, 27–30 May 2019. [Google Scholar]
- Mamou, M.; Mébarki, Y.; Khalid, M.; Genest, M.; Coutu, D.; Popov, A.V.; Sainmont, C.; Georges, T.; Grigorie, L.; Botez, R.M. Aerodynamic Performance Optimization of a Wind Tunnel Morphing Wing Model Subject to Various Cruise Flow Conditions. In Proceedings of the 27th International Congress of the Aeronautical Sciences (ICAS), Nice, France, 19–24 September 2010. [Google Scholar]
- Popov, A.; Grigoire, L.T.; Botez, R.; Mamou, M.; Mebarki, Y. Real Time Morphing Wing Optimization Valiation using Wind Tunnel Tests. AIAA J. Aircr. 2010, 47, 1346–1355. [Google Scholar] [CrossRef]
- Wölcken, P.; Papadopoulos, M. (Eds.) Smart Intelligent Aircraft Structures (SARISTU): Proceedings of the Final Project Conference; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Liauzun, C.; le Bihan, D.; David, J.M.; Joly, D.; Paluch, B. Study of Morphing Winglet Concepts Aimed at Improving Load Control and the Aeroelastic Behavior of Civil Transport Aircraft. AerospaceLab J. 2018, 14. Available online: http://www.aerospacelab-journal.org/ (accessed on 2 August 2019).































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mach Number | Altitude | Reynolds Number | CL (Wing + Body) | |
|---|---|---|---|---|
| Cruise | 0.52 | 20,000 ft | 17.3 × 106 | 0.50 |
| Long-Range | 0.45 | 20,000 ft | 15.0 × 106 | 0.67 |
| Low Speed | 0.20 | 0 ft | 11.8 × 106 | - |
| Lower CL | Nominal CL | Upper CL | |
|---|---|---|---|
| Root Airfoil | 0.25 | 0.50 | 0.90 |
| Tip Airfoil | 0.10 | 0.30 | 0.60 |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moens, F. Augmented Aircraft Performance with the Use of Morphing Technology for a Turboprop Regional Aircraft Wing. Biomimetics 2019, 4, 64. https://doi.org/10.3390/biomimetics4030064
Moens F. Augmented Aircraft Performance with the Use of Morphing Technology for a Turboprop Regional Aircraft Wing. Biomimetics. 2019; 4(3):64. https://doi.org/10.3390/biomimetics4030064
Chicago/Turabian StyleMoens, Frédéric. 2019. "Augmented Aircraft Performance with the Use of Morphing Technology for a Turboprop Regional Aircraft Wing" Biomimetics 4, no. 3: 64. https://doi.org/10.3390/biomimetics4030064
APA StyleMoens, F. (2019). Augmented Aircraft Performance with the Use of Morphing Technology for a Turboprop Regional Aircraft Wing. Biomimetics, 4(3), 64. https://doi.org/10.3390/biomimetics4030064