
Plasma-Textured Teflon: Repulsion in Air of Water Droplets and Drag Reduction Underwater




 and
and 
Abstract
:1. Introduction
2. Materials and Methods
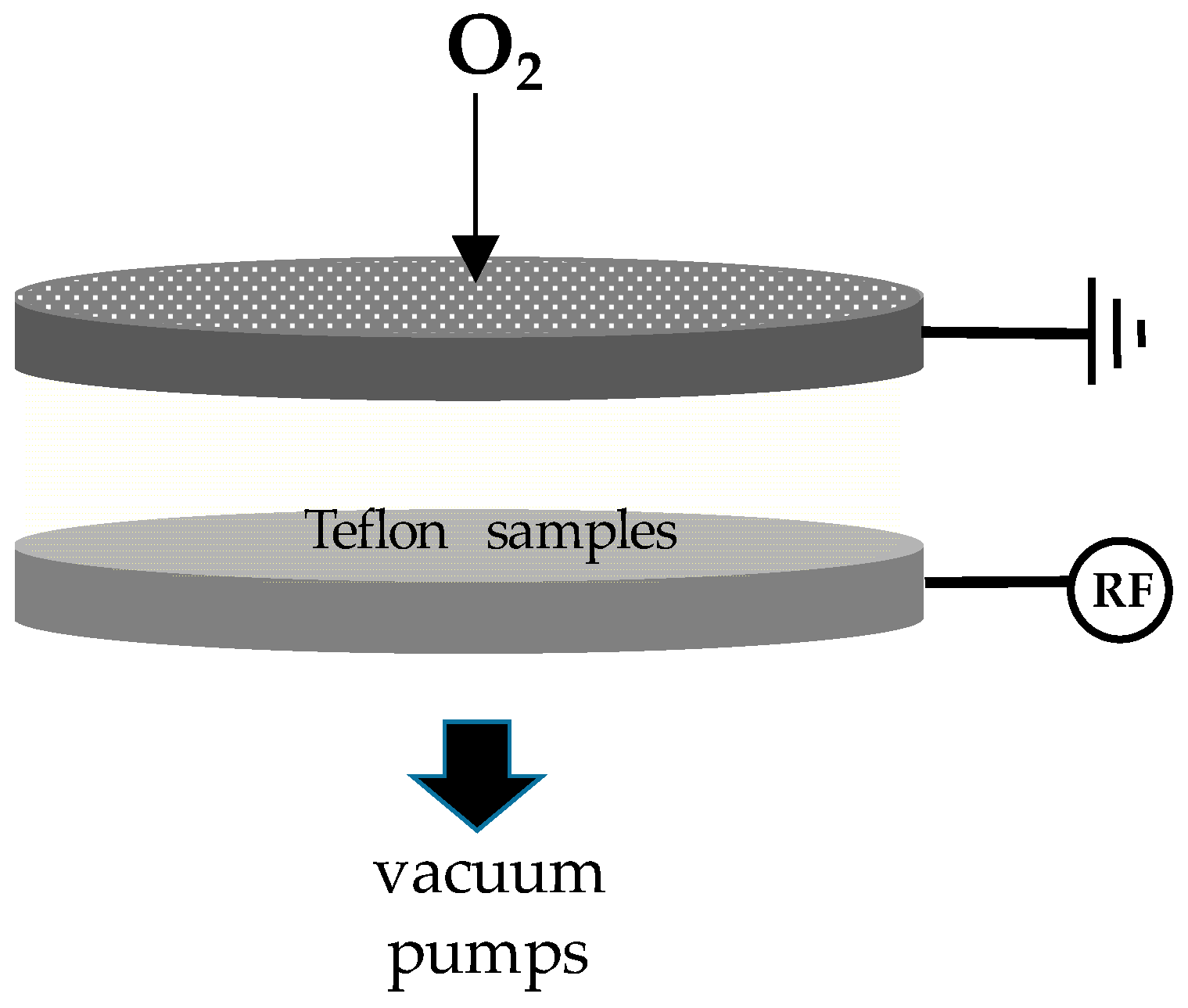
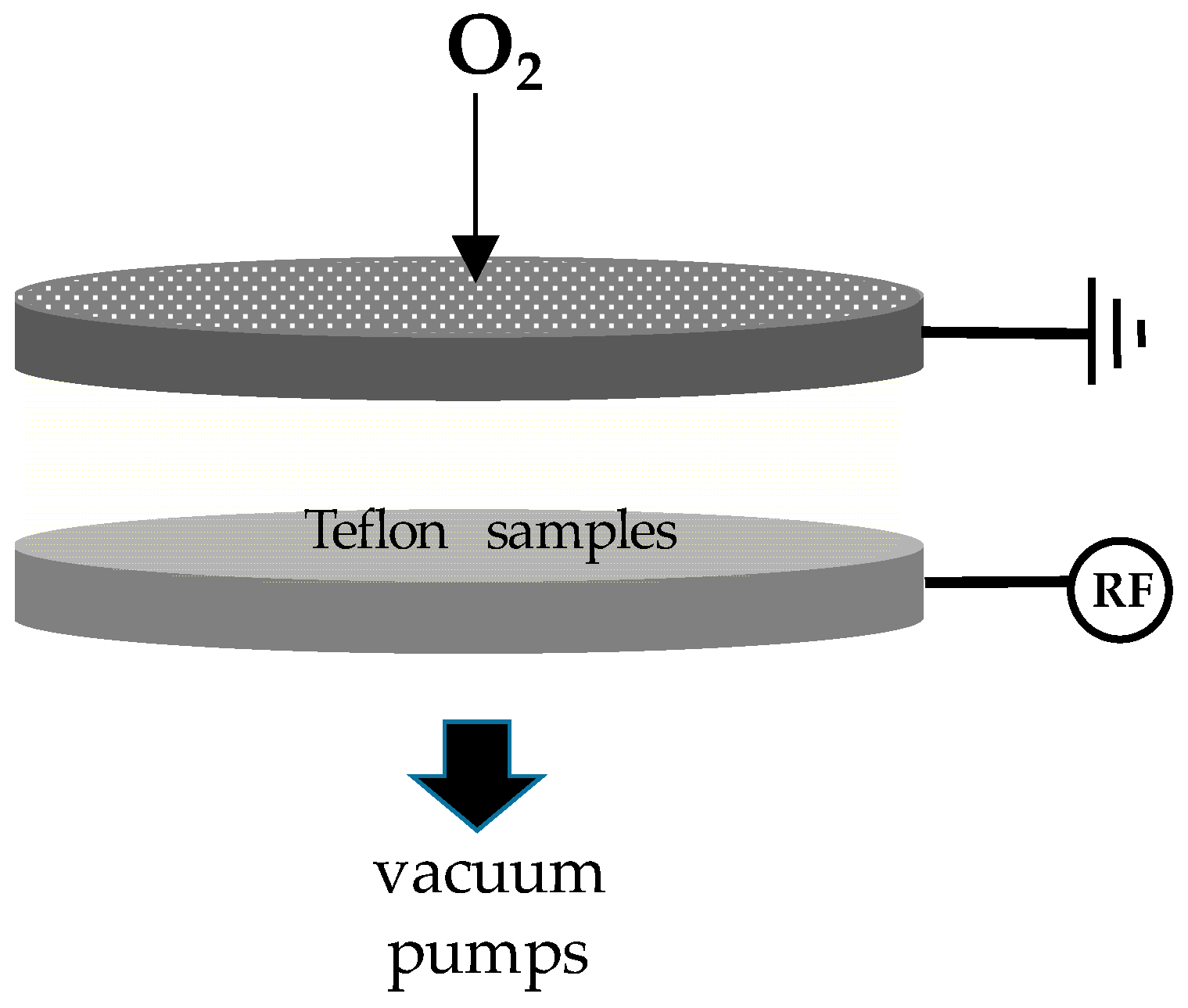
2.1. Teflon Surface Modification
2.2. Topographical and Chemical Characterization
2.3. Water Contact Angle and Drop Impact Measurement
2.4. Optical Imaging of Air Layer on Submerged Surfaces
2.5. Vertical Fall in Water Experiments
3. Results and Discussion
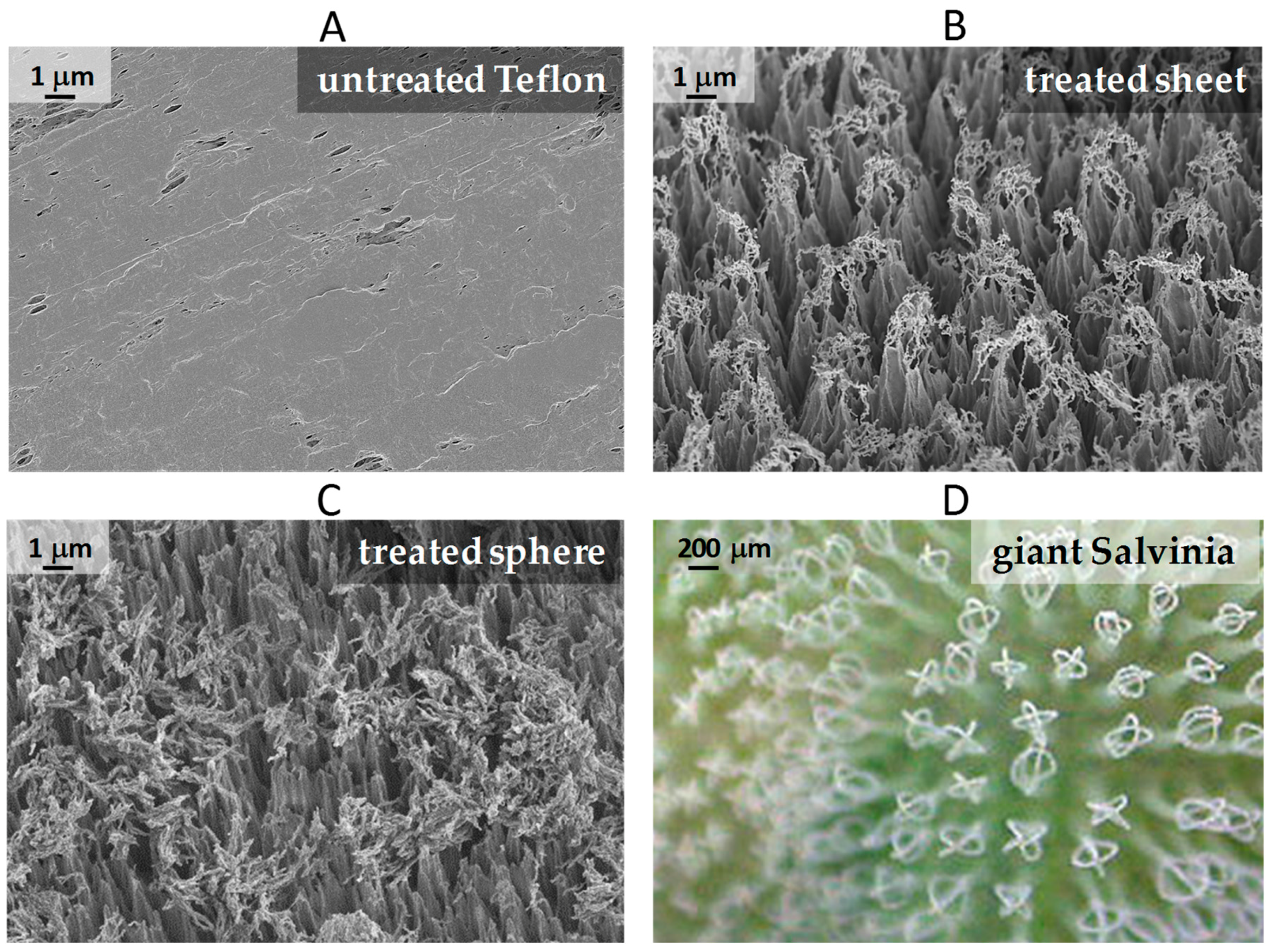
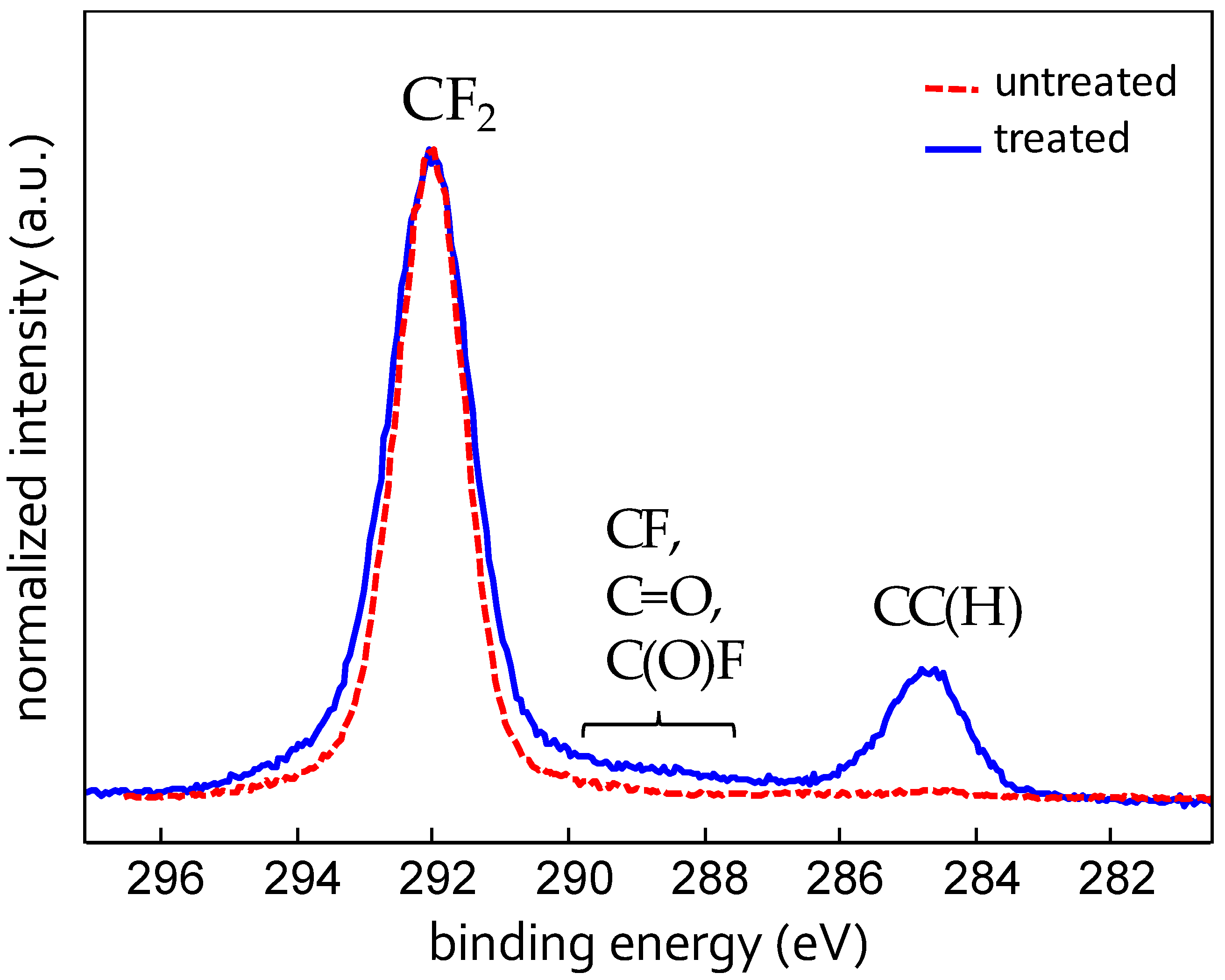
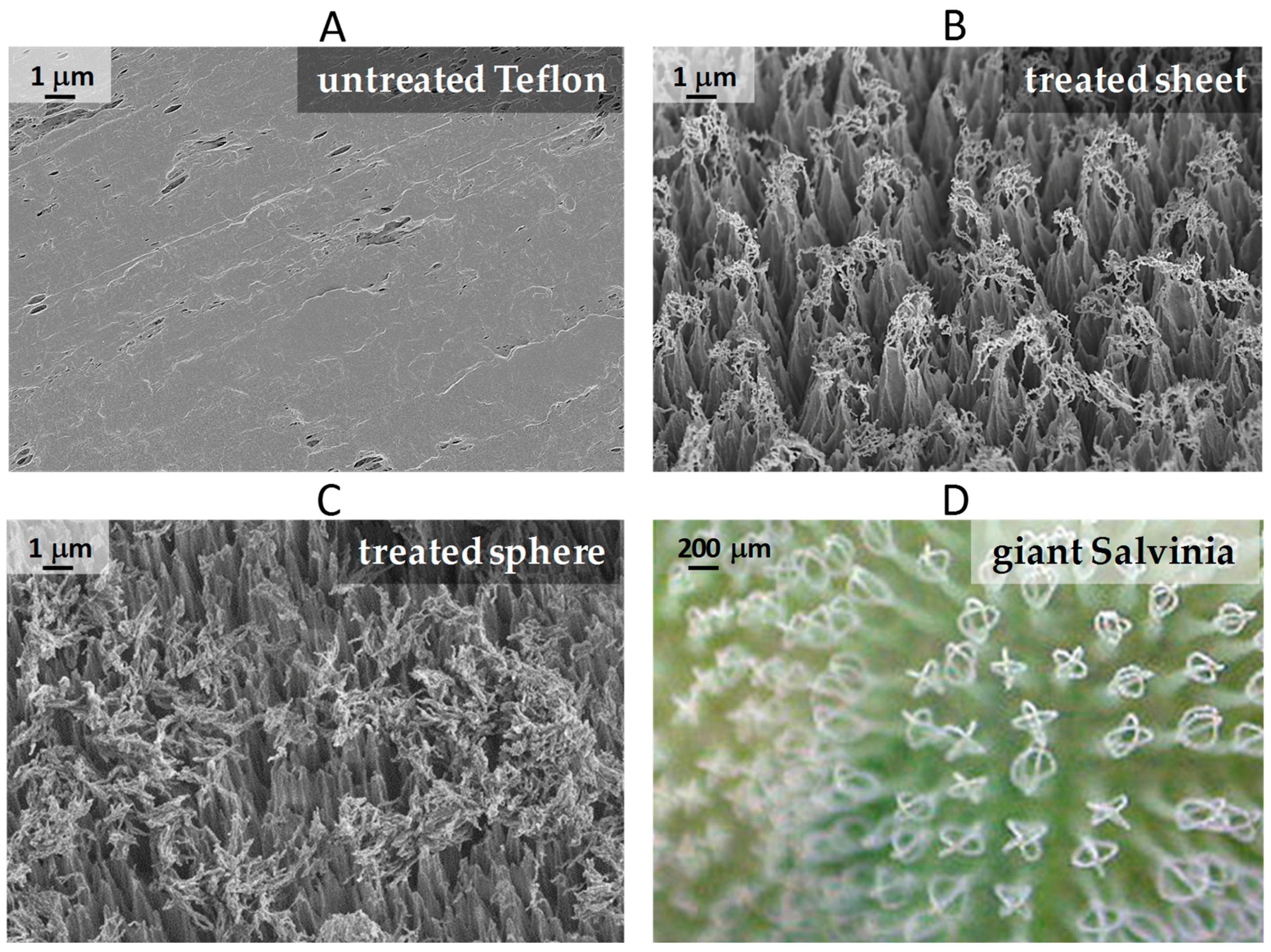
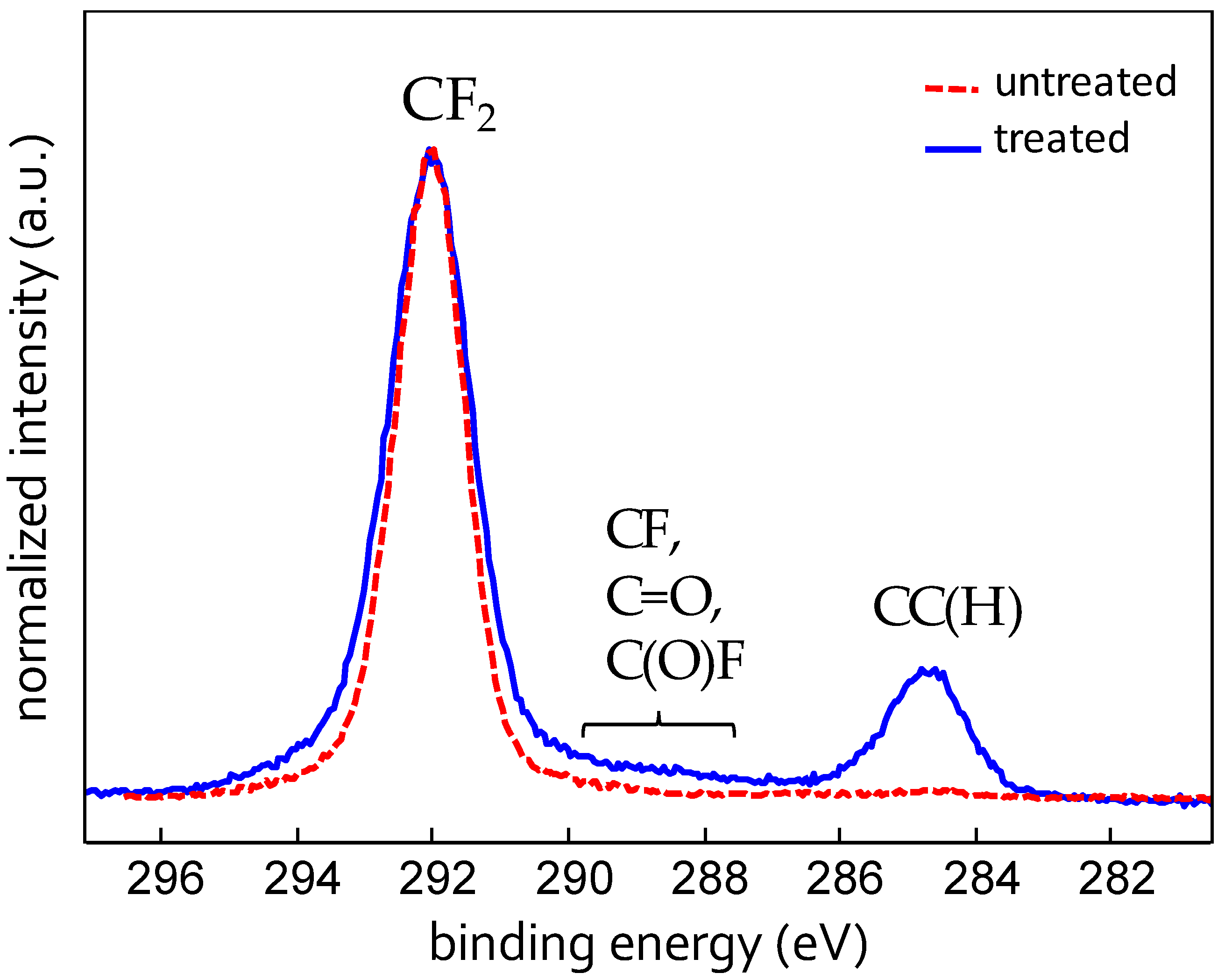
3.1. Effect of Plasma Modification: Chemical and Topographical Features
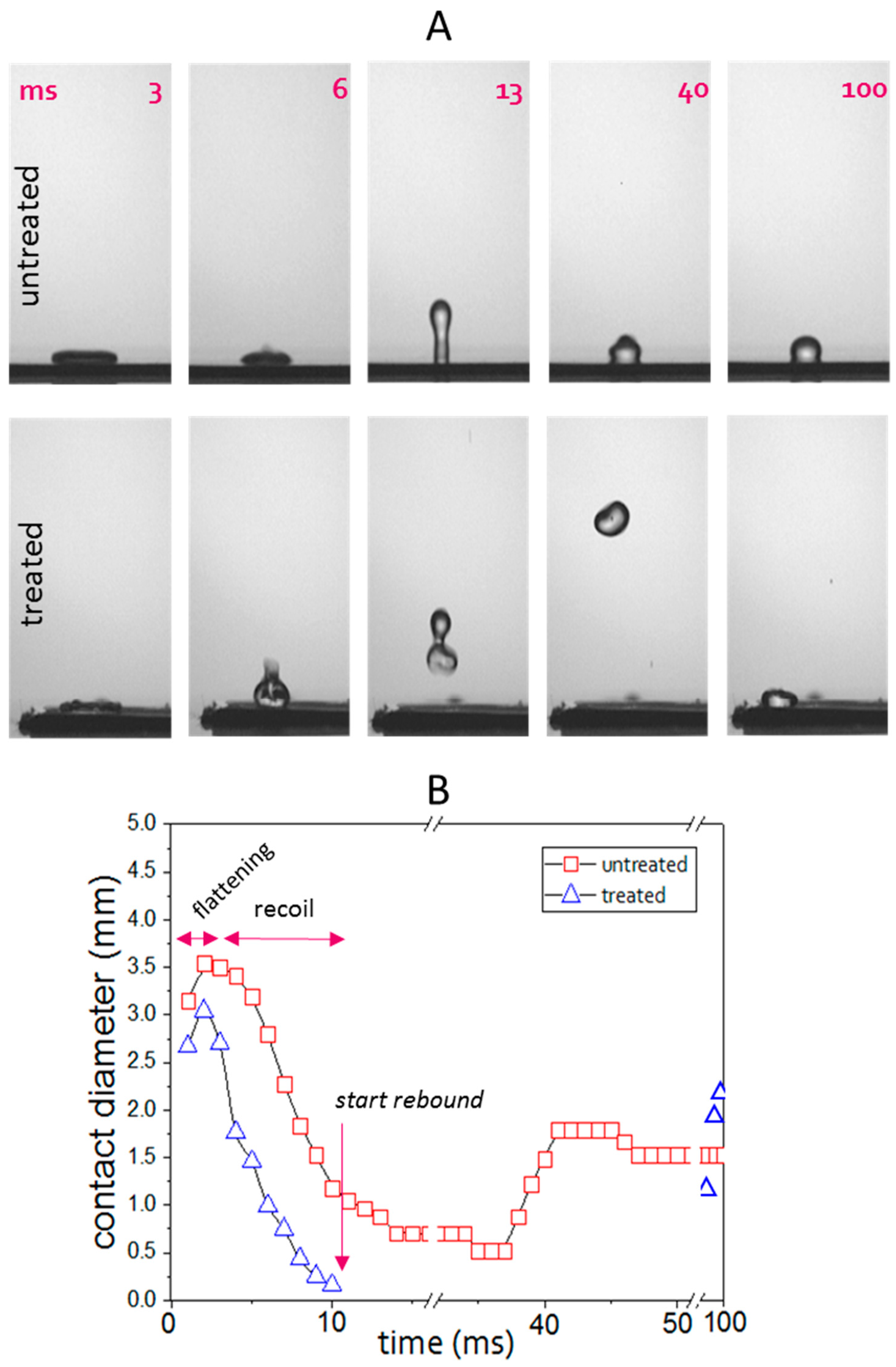
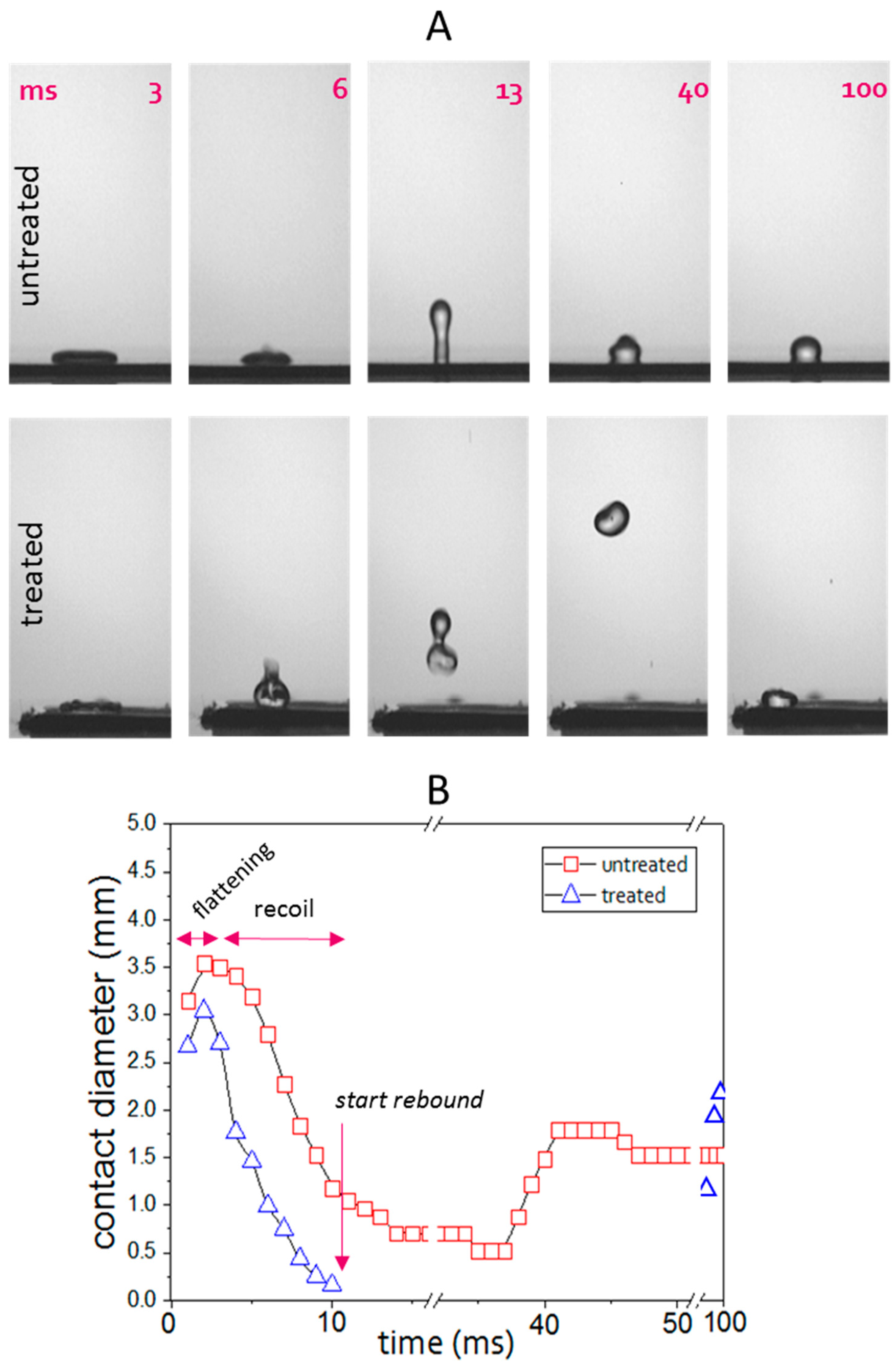
3.2. Repulsive Behavior against Impacting Water Drops
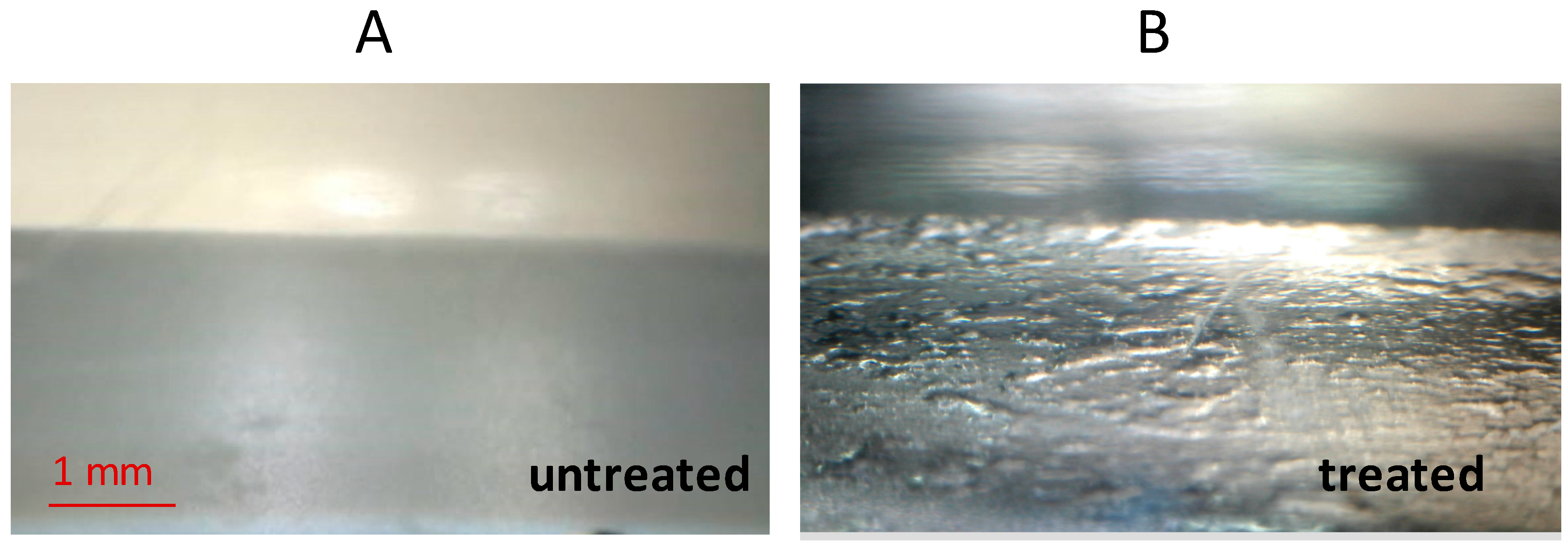
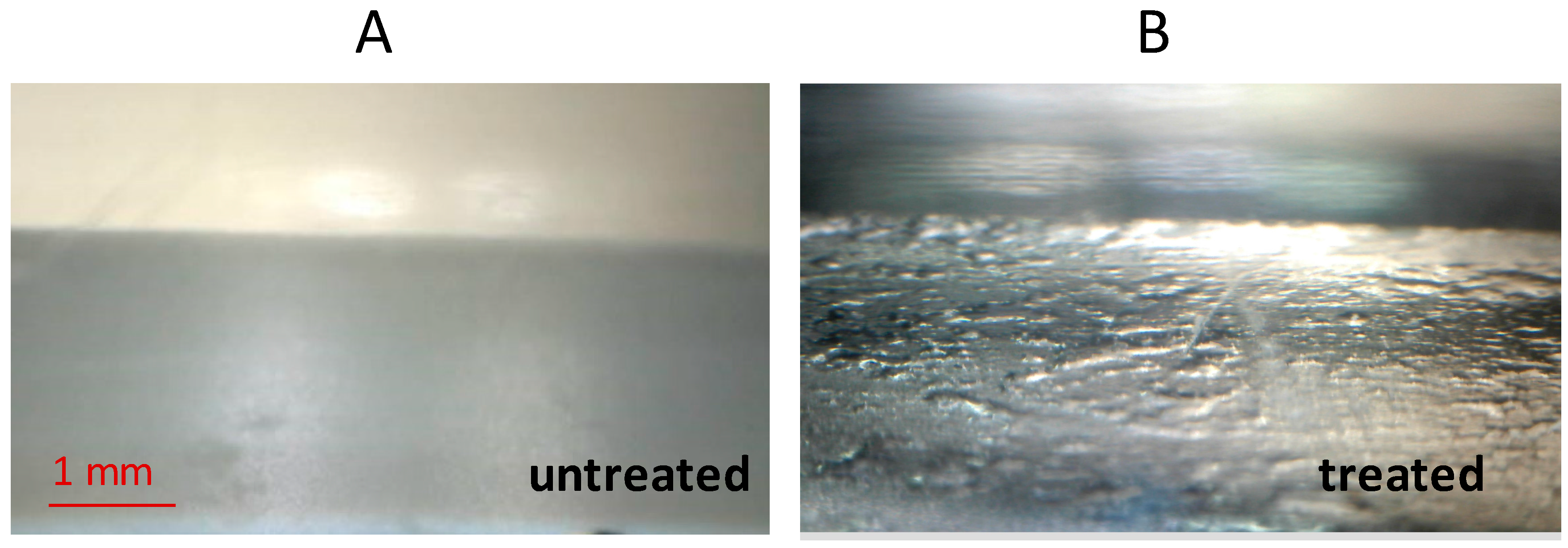
3.3. Appearance of Still Surfaces Underwater
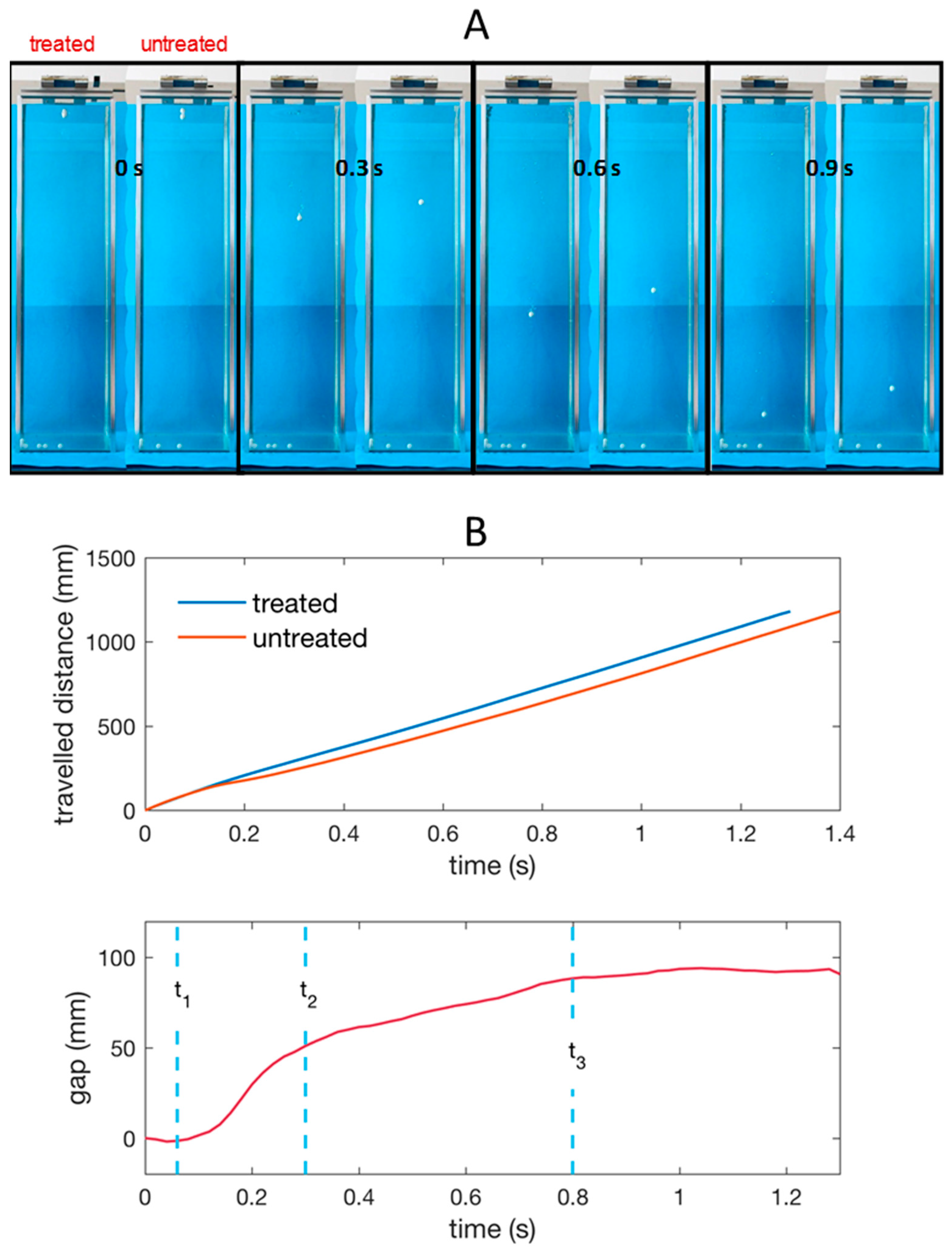
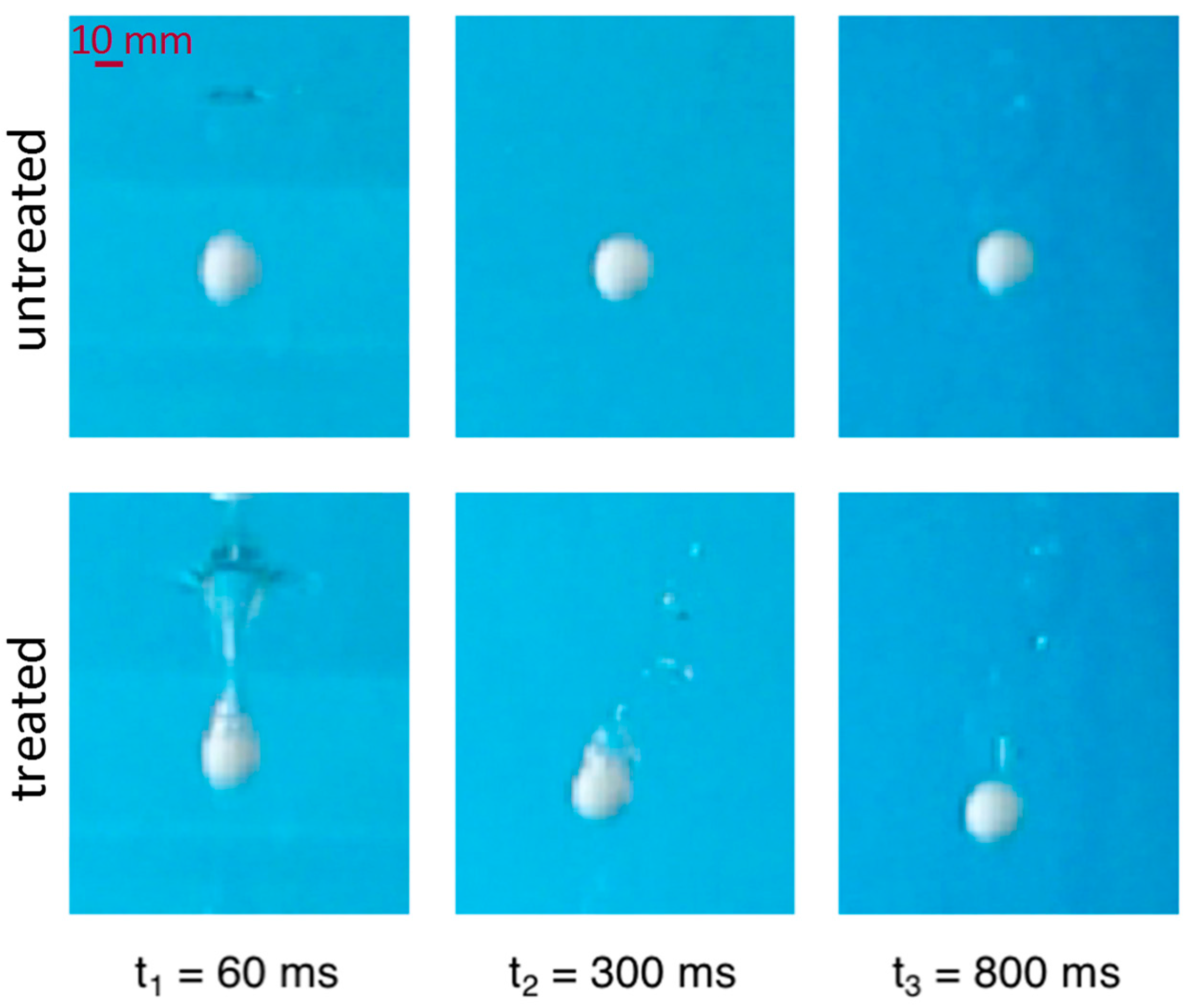
3.4. Drag Variation on Teflon Sphere Falling in Water
4. Conclusions
- (i)
- Modified plane Teflon in ambient air repels impacting droplets at high velocity by promoting a full detachment of the liquid in a time as low as previously observed only on heated solids;
- (ii)
- When placed underwater, a shiny film is observed on the treated surface, indicating the formation of a continuous air layer between the solid and the liquid;
- (iii)
- The above-mentioned performances are more pronounced on this surface than on other previously shown textured surfaces with higher water contact angle, indicating a relatively higher retaining capacity though a relatively lower superhydrophobicity. These results recall a wetting effect which is similar to that of the giant salvinia leaf, which has a high air retention ability though not being particularly superhydrophobic. This may be correlated to the morphology generated by the plasma etching process, similar to the eggbeaters structures on that leaf, both characterized by pillars bearing a curved feature on the top, hiding, this way, the bottom part of the surface cavities.
- (iv)
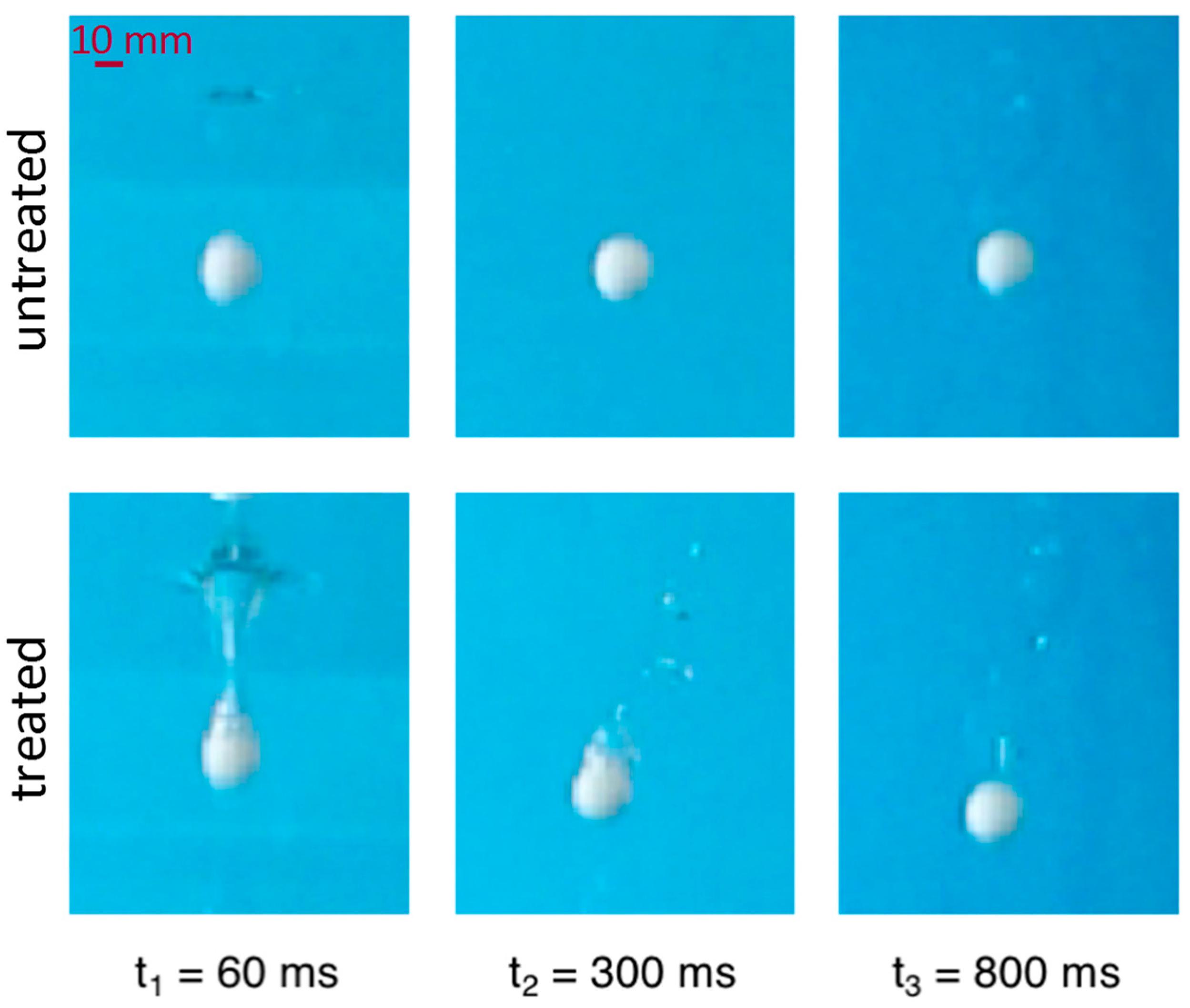
- Teflon spheres modified under the same conditions present a similar texture; when falling into water (laminar conditions) these samples show a higher mean velocity than the pristine ones. This effect slightly decreases in time (i.e., along the fall), with a rate which appears to be correlated with depletion of an “air spindle” connected with the superhydrophobic sphere.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wenzel, R.N. Surface roughness and contact angle. J. Phys. Chem. 1949, 53, 1466–1470. [Google Scholar] [CrossRef]
- Cassie, A.B.D.; Baxter, S. Wettability of porous surface. Trans. Faraday Soc. 1944, 40, 546–551. [Google Scholar] [CrossRef]
- Barthlott, W.; Ehler, N. Raster-Elektronenmikroskopie der Epidermis-Oberflächen von Spermatophyten; Tropische und subtropische Pflanzenwelt; Akademie der Wiss. u.d. Literatur: Mainz, Germany, 1977; pp. 19–110. [Google Scholar]
- Drelich, J.; Marmur, A. Physics and applications of superhydrophobic and superhydrophilic surfaces and coatings. Surface Innov. 2014, 2, 211–227. [Google Scholar] [CrossRef]
- Gogolides, E.; Ellinas, K.; Tserepi, A. Hierarchical micro and nano-structured, hydrophilic, superhydrophobic and superoleophobic surfaces incorporated in microfluidics, microarrays and lab on chip microsystems. Microelectron. Eng. 2015, 132, 135–155. [Google Scholar] [CrossRef]
- Quéré, D. Non-sticking drops. Rep. Prog. Phys. 2005, 68, 2495–2532. [Google Scholar] [CrossRef]
- Richard, D.; Clanet, C.; Quéré, D. Contact time of a bouncing droplet. Nature 2002, 417, 811–820. [Google Scholar] [CrossRef] [PubMed]
- Richard, D.; Quéré, D. Bouncing water drops. Europhys. Lett. 2000, 50, 769–775. [Google Scholar] [CrossRef]
- Bartolo, D.; Bouamrirene, F.; Verneuil, É.; Buguin, A.; Silberzan, P.; Moulinet, S. Bouncing or sticky droplets: Impalement transitions on superhydrophobic micropatterned surfaces. Europhys. Lett. 2006, 74, 299–305. [Google Scholar] [CrossRef]
- Reyssat, M.; Pépin, A.; Marty, F.; Chen, Y.; Quéré, D. Bouncing Transitions on microtextured materials. Europhys. Lett. 2006, 74, 306–312. [Google Scholar] [CrossRef]
- Wu, Y.; Saito, N.; Nae, F.A.; Inoue, Y.; Takai, O. Water droplets interaction with super-hydrophobic surfaces. Surf. Sci. 2006, 600, 3710–3714. [Google Scholar] [CrossRef]
- Rioboo, R.; Voué, M.; Vaillant, A.; De Conick, J. Drop Impact on Porous Superhydrophobic Polymer Surfaces. Langmuir 2008, 24, 14074–14077. [Google Scholar] [CrossRef] [PubMed]
- Brunet, P.; Lapierre, F.; Thomy, V.; Coffinier, Y.; Boukherroub, R. Extreme Resistance of Superhydrophobic Surfaces to Impalement: Reversible Electrowetting Related to the Impacting/Bouncing Drop Test. Langmuir 2008, 24, 11203–11208. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Ma, X.; Lan, Z. Dynamic Behavior of the Water Droplet Impact on a Textured Hydrophobic/Superhydrophobic Surface: The Effect of the Remaining Liquid Film Arising on the Pillars Tops on the Contact Time. Langmuir 2010, 26, 4831–4838. [Google Scholar] [CrossRef] [PubMed]
- Gao, X.; Jiang, L. Water-Repellent Legs of Water Strider. Nature 2004, 432, 36. [Google Scholar] [CrossRef] [PubMed]
- Su, B.; Li, M.; Lu, Q. Toward Understanding Whether Superhydrophobic Surfaces Can Really Decrease Fluidic Friction Drag. Langmuir 2010, 26, 6048–6052. [Google Scholar] [CrossRef] [PubMed]
- Shi, F.; Niu, J.; Liu, J.; Liu, F.; Wang, Z.; Feng, Q.X.; Zhang, X.; Shi, F. Towards Understanding Why a Superhydrophobic Coating Is Needed by Water Striders. Adv. Mater. 2007, 19, 2257–2261. [Google Scholar] [CrossRef]
- Cheng, M.; Zhang, S.; Dong, H.; Han, S.; Wei, H.; Shi, F. Improving the durability of a drag-reducing nanocoating by enhancing its mechanical Stability. ACS Appl. Mater. Interfaces 2015, 7, 4275–4282. [Google Scholar] [CrossRef] [PubMed]
- McHale, G.; Shirtcliffe, N.J.; Evans, C.R.; Newton, M.I. Terminal velocity and drag reduction measurements on superhydrophobic spheres. Appl. Phys. Lett. 2009, 94, 064104. [Google Scholar] [CrossRef]
- Zhang, S.; Ouyang, X.; Li, J.; Gao, S.; Han, S.; Liu, L.; Wei, H. Underwater drag-reducing effect of superhydrophobic submarine model Zhang. Langmuir 2015, 31, 587–593. [Google Scholar] [CrossRef] [PubMed]
- Brassard, J.-D.; Sarkar, D.K.; Perron, J. Studies of drag on the nanocomposite superhydrophobic surfaces. Appl. Surf. Sci. 2015, 324, 525–531. [Google Scholar] [CrossRef]
- Kavalenka, M.N.; Vüllers, F.; Lischker, S.; Zeiger, C.; Hopf, A.; Röhrig, M.; Rapp, B.; Worgull, E.; Hölscher, H. Bioinspired Air-Retaining Nanofur for Drag Reduction. ACS Appl. Mater. Interfaces 2015, 7, 10651–10655. [Google Scholar] [CrossRef] [PubMed]
- Barthlott, W.; Schimmel, T.; Wiersch, S.; Koch, K.; Brede, M.; Barczewski, M.; Walheim, S.; Weis, A.; Kaltenmaier, A.; Leder, A.; et al. The Salvinia Paradox: Superhydrophobic Surfaces with Hydrophilic Pins for Air Retention under Water. Adv. Mater. 2010, 22, 2325–2328. [Google Scholar] [CrossRef] [PubMed]
- Di Mundo, R.; Palumbo, F.; d’Agostino, R. Nanotexturing of Polystyrene Surface in Fluorocarbon Plasmas: From Sticky to Slippery Superhydrophobicity. Langmuir 2008, 24, 5044–5051. [Google Scholar] [CrossRef] [PubMed]
- Di Mundo, R.; Bottiglione, F.; Carbone, G. Cassie state robustness of plasma generated randomly nano-rough surfaces. Appl. Surf. Sci. 2014, 316, 324–332. [Google Scholar] [CrossRef]
- Di Mundo, R.; Troia, M.; Palumbo, F.; d’Agostino, R. Nano-texturing of Transparent Polymers with Plasma Etching: Tailoring Topography for a Low Reflectivity. Plasma Proc. Polym. 2012, 9, 947–954. [Google Scholar] [CrossRef]
- Song, D.; Daniello, R.J.; Rothstein, J.P. Drag reduction using superhydrophobic sanded Teflon surfaces. Exp. Fluids 2014, 55, 1783. [Google Scholar] [CrossRef]
- Di Mundo, R.; Bottiglione, F.; Palumbo, F.; Favia, P.; Carbone, G. Sphere-on-cone microstructures on Teflon surface: Repulsive behavior against impacting water droplets. Mater. Des. 2016, 92, 1052–1061. [Google Scholar] [CrossRef]
- Schneider, C.A.; Rasband, W.S.; Eliceiri, K.W. NIH Image to ImageJ: 25 years of image analysis. Nat. Methods 2012, 9, 671–675. [Google Scholar] [CrossRef] [PubMed]
- Open Source Physics. Available online: http://www.opensourcephysics.org/ (accessed on 21 January 2017).
- Mic Julien, Commonwealth Scientific and Industrial Research Organization, Bugwood.org. Available online: http://www.insectimages.org/browse/detail.cfm?imgnum=0002107#collapseseven (accessed on 21 January 2017).
- Wildeman, S.; Sun, C.; Lohse, D. On the spreading of impacting drops. J. Fluid Mech. 2016, 805, 636–655. [Google Scholar] [CrossRef]
- Ramachandran, R.; Sobolev, K.; Nosonovsky, M. Dynamics of Droplet Impact on Hydrophobic/Icephobic Concrete with the Potential for Superhydrophobicity. Langmuir 2015, 31, 1437–1444. [Google Scholar] [CrossRef] [PubMed]
- Bird, C.; Dhiman, R.; Kwon, H.-M.; Varanasi, K.K. Reducing the contact time of a bouncing drop. Nature 2013, 503, 385–388. [Google Scholar] [CrossRef] [PubMed]
- Shen, Y.; Tao, J.; Tao, H.; Chen, S.; Pan, L.; Wang, T. Approaching the theoretical contact time of a bouncing droplet on the rational macrostructured superhydrophobic surfaces. Appl. Phys. Lett. 2015, 107, 111604-1–111604-4. [Google Scholar] [CrossRef]
- Sheng, X.; Zhang, J. Air layer on superhydrophobic surface underwater. Colloids Surf. A 2011, 377, 374–378. [Google Scholar] [CrossRef]
- Poetes, R.; Holtzmann, K.; Franze, K.; Steiner, U. Metastable Underwater Superhydrophobicity. Phys. Rev. Lett. 2010, 105, 166104-1–166104-4. [Google Scholar] [CrossRef] [PubMed]
- Di Mundo, R.; Bottiglione, F.; Palumbo, F.; Notarnicola, M.; Carbone, G. Filamentary superhydrophobic Teflon surfaces: Moderate apparent contact angle but superior air-retaining properties. J. Colloid Interface Sci. 2016, 482, 175–182. [Google Scholar] [CrossRef] [PubMed]
- Aristoff, J.M.; Bush, J.W.M. Water entry of small hydrophobic spheres. J. Fluid Mech. 2009, 619, 45–78. [Google Scholar] [CrossRef]
- Aristoff, M.; Truscott, T.T.; Techet, A.H.; Bush, J.W.M. The water entry of decelerating spheres. Phys. Fluids 2010, 22, 032102-1–032102-8. [Google Scholar] [CrossRef]
- Clift, R.; Grace, J.R.; Weber, M.E. Bubbles, Drops, and Particles; Academic Press: New York, NY, USA, 1978. [Google Scholar]
- McHale, G.; Flynn, R.M.; Newton, M.I. Plastron induced drag reduction and increased slip on a superhydrophobic sphere. Soft Matter 2011, 7, 10100–10107. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Teflon Surface | C (%) | F (%) | O (%) | Fe (%) | Adv. WCA (°) | Rec. WCA (°) |
|---|---|---|---|---|---|---|
| Untreated | 33 | 66 | 1 | - | 125 | 94 |
| Treated | 33 | 58 | 4 | 4 | 162 | 160 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Mundo, R.; Bottiglione, F.; Notarnicola, M.; Palumbo, F.; Pascazio, G. Plasma-Textured Teflon: Repulsion in Air of Water Droplets and Drag Reduction Underwater. Biomimetics 2017, 2, 1. https://doi.org/10.3390/biomimetics2010001
Di Mundo R, Bottiglione F, Notarnicola M, Palumbo F, Pascazio G. Plasma-Textured Teflon: Repulsion in Air of Water Droplets and Drag Reduction Underwater. Biomimetics. 2017; 2(1):1. https://doi.org/10.3390/biomimetics2010001
Chicago/Turabian StyleDi Mundo, Rosa, Francesco Bottiglione, Michele Notarnicola, Fabio Palumbo, and Giuseppe Pascazio. 2017. "Plasma-Textured Teflon: Repulsion in Air of Water Droplets and Drag Reduction Underwater" Biomimetics 2, no. 1: 1. https://doi.org/10.3390/biomimetics2010001
APA StyleDi Mundo, R., Bottiglione, F., Notarnicola, M., Palumbo, F., & Pascazio, G. (2017). Plasma-Textured Teflon: Repulsion in Air of Water Droplets and Drag Reduction Underwater. Biomimetics, 2(1), 1. https://doi.org/10.3390/biomimetics2010001