1. Introduction
In a previous work, the development of soft surfaces with controllable adhesion was presented [
1]; this was brought about by the pressurization of subsurface chambers, which allowed a switch in the magnitude of the adhesion force against a harder counterface from one level to another by modifying the soft surface’s waviness or long wavelength undulations. In that study, both the surfaces participating in the contact were nominally smooth with root-mean-square or roughnesses of less than 20 nm. These are very much lower roughness values than those of conventionally engineered metallic surfaces, which will typically have roughnesses of between ten and hundred times this figure.
The extent of adhesion between a hard and a smooth soft material is greatly reduced by any roughness on the harder surface. This is because of the very short-range nature (only nanometres) of the van der Waal forces on which adhesion depends. To be effective there must be intimate contact between the two surfaces. When the hard surface is insufficiently smooth, the soft material has to deform elastically to conform to the detailed topography of the counterface and this stores additional elastic energy within the soft material. When the external load is reduced or removed, this stored energy becomes available to peel apart any adhered junctions that have been formed and thus destroy the observation of macroscopic adhesion. It is primarily for this reason that adhesion between macroscopic objects is not encountered in everyday life. Paradoxically, in order to maintain adhesion with a rough hard surface it is necessary to introduce some texture onto the softer surface so the local accommodation to the counterface topography becomes possible with a reduced elastic energy penalty and, thus, improved maintenance of macroscopic adhesion.
Nature has mastered the task of providing “good” adhesion between naturally rough surfaces by developing features with distributed structural stiffness. Hierarchical fibrillar pads represent a frequently found natural solution for situations in which a strong adhesive force is required which must be highly dynamic and effective over a wide range of surface roughnesses: examples are the feet of geckos [
2] and of insects, such as spiders and beetles [
3]. The physical principle behind the versatility of these fibrillar pads lies in the hierarchical compliance in the outermost regions of their structure. This allows the deformation of their surface to conform to the counter-surface topography with the minimum storage of elastic energy. This ensures a large area in intimate contact that can collectively provide a greater energy of adhesion than the elastic energy stored due to the deformation of the surface [
4,
5]. Taking inspiration from these natural structures for enhanced adhesion against rough counterfaces, we have introduced a “brush-like” texture on the surfaces of the switchable adhesion devices. Once again, increasing the long wavelength waviness in the contact, through a network of pressurized buried chambers, will peel the surfaces apart.
3. Results and Discussion
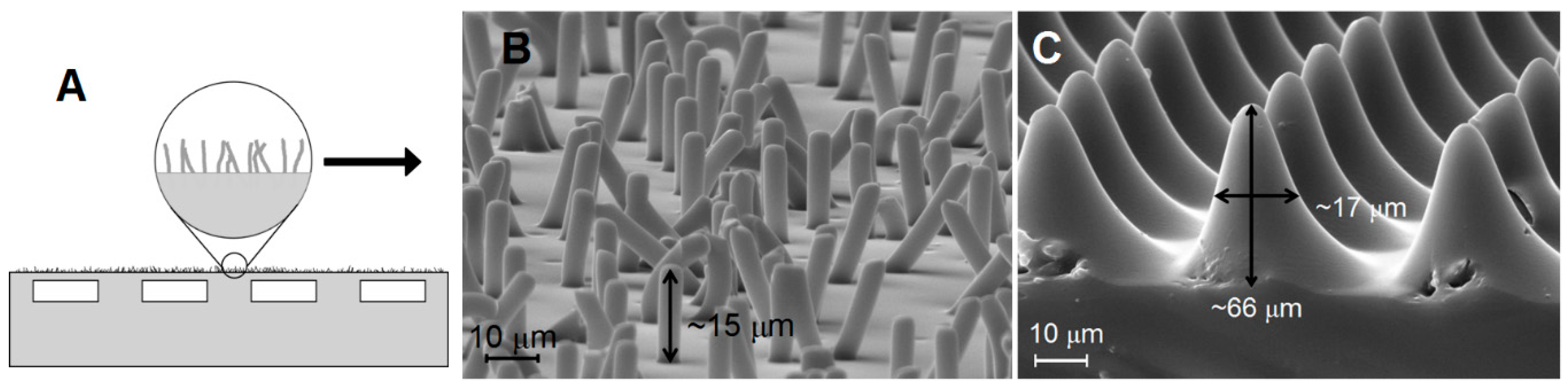
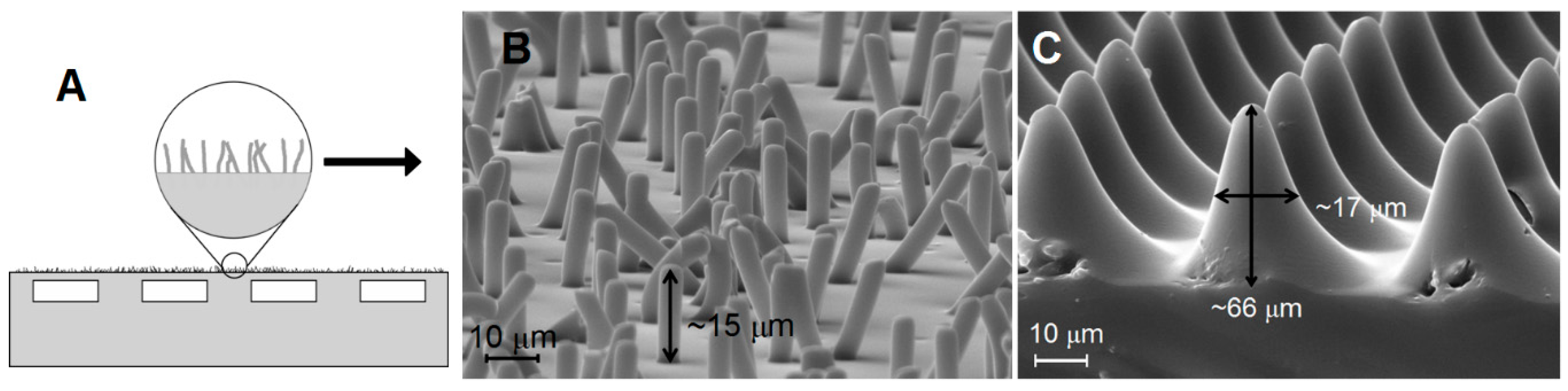
A set of preliminary measurements were carried out on the textured surfaces shown in
Figure 2. In these, PDMS textured surfaces fixed on spherical PDMS lenses were pressed against the hard flat and smooth (
Rq < 10 nm) top surface of the glass beam splitter under a load of 25 mN. The compliant spring was replaced by an effectively rigid link. These experiments allowed a clear visualization of the contact regions formed with each polymeric texture. Parts A, B and C in
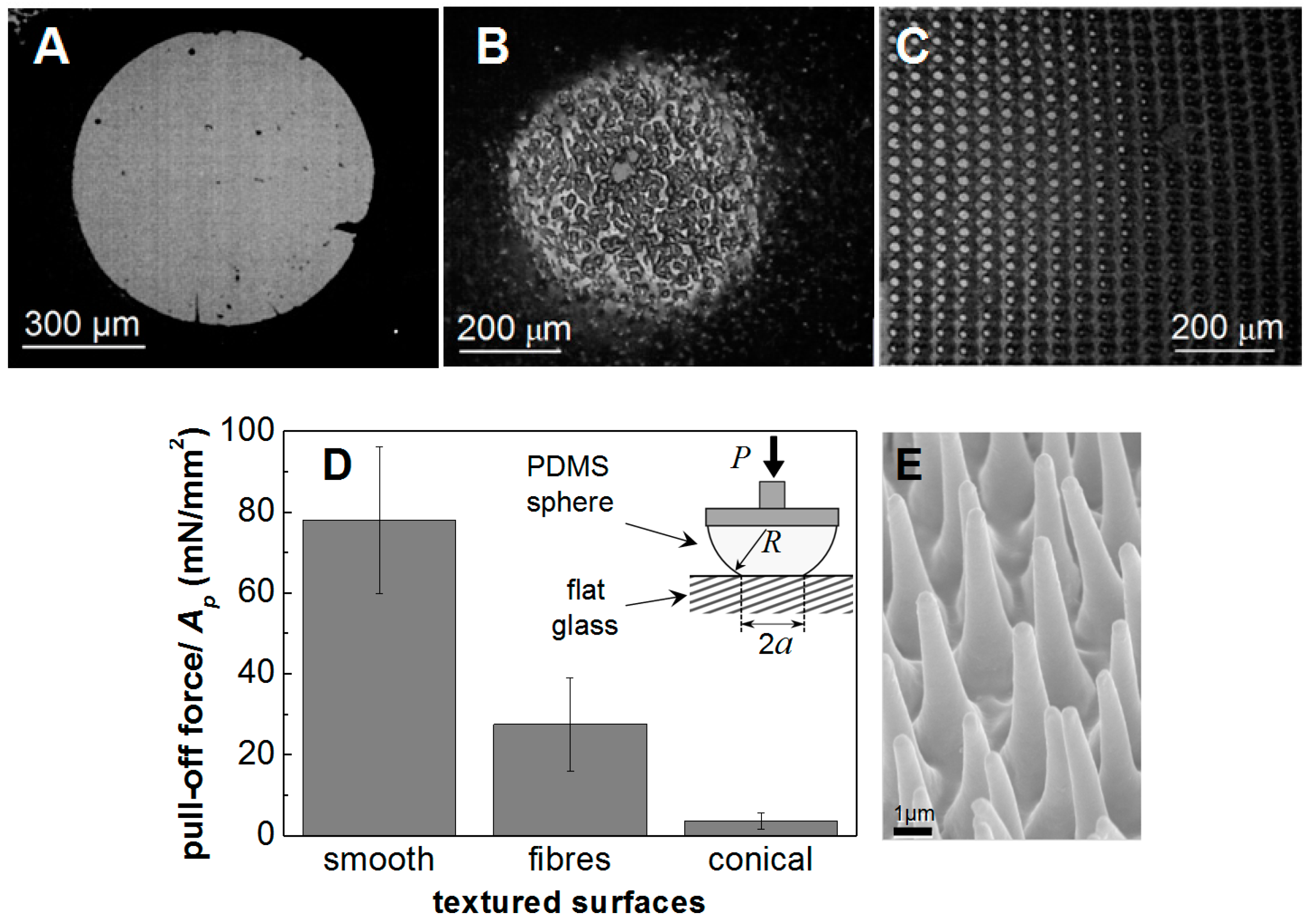
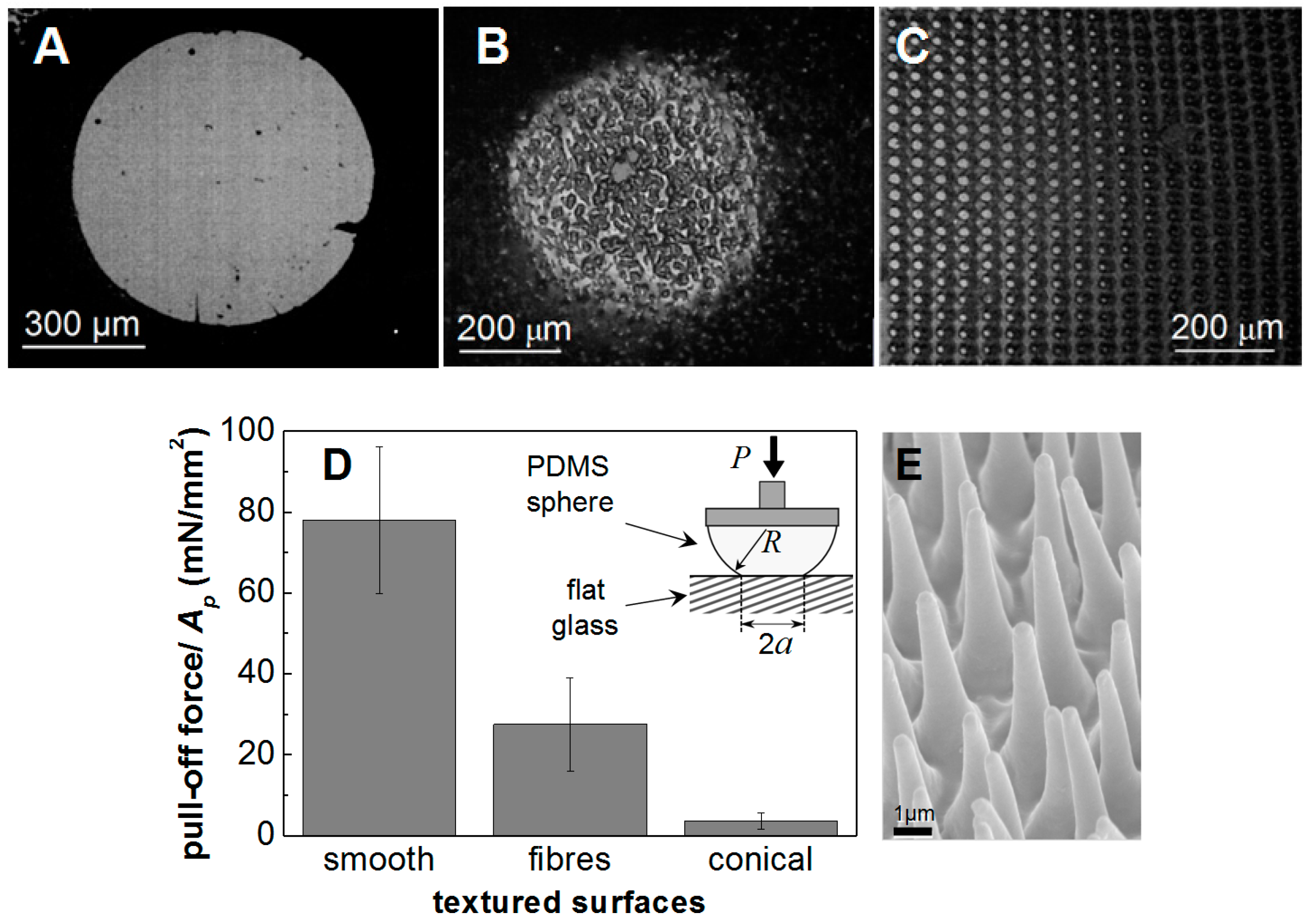
Figure 4 show images of the contact area against the beam splitter of smooth, fibrillar and conical pillars textures, respectively. In
Figure 4D a comparative figure is presented of the pull-off force measured from each surface normalized by the Hertzian contact area,
Ap, of a contact with similar load and radius but untextured surfaces. The area is given by
Ap = π
a2 where
a is the radius of contact estimated from the Hertzian expression [
6]:
with
R being the reduced radius of curvature of the conjunction in this case determined by the radius of the PDMS sphere,
P is the applied load and
K = 4.6 MPa is the elastic constant of the combined PDMS-glass contact pair. The bars indicate the range of values measured in three experiments.
As anticipated from the significantly larger contact area, the contact with the smooth PDMS surface (
Figure 4A) exhibited the highest adhesion force, at 78 mN, among the three types of contact shown in
Figure 4. In the case of the textured surfaces, both the reduction in the area available for “true contact” and the energy stored in the elastic hinterland behind the contact spots formed by the higher asperities within the gross contact area, which becomes available to peel apart the adhesive junctions formed by the less prominent asperities, results in the reduction of the adhesion force to values of 23 mN and
ca. 3 mN, respectively.
The behavior of the fibrillar surface in
Figure 2B (contact in
Figure 4B) can be contrasted to that of the surface with conical features in
Figure 2C (contact in
Figure 4C). Although having rather similar tip dimensions, the individual conical pillars will be much more resistant to buckling and so present a much stiffer surface layer than the fibrils of
Figure 2B. Consequently they will store more elastic energy in comparison with the similar reduction in surface energy and so would be expected to further reduce the propensity to adhere giving highly reduced values of pull-off force. Experiment shows this to be the case, as shown in
Figure 4D. The fibrillar structure retained about 30% of the adhesion of a smooth PDMS surface but the conical pillars required an extremely small pull-off force (<4 mN) compared to the force of
ca. 80 mN needed to separate a smooth PDMS surface from the same glass counterface.
The requirement for a satisfactory adhesive to exhibit a certain minimum level of compliance to give useful values of “tackiness” has been the subject of various empirical rules in the field of adhesives. The best known being the Dahlquist criterion [
8], which states that for success as an adhesive a necessary (though, presumably, not sufficient) condition is that the effective surface modulus
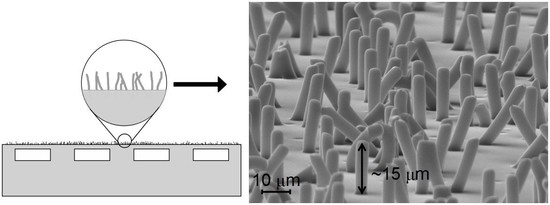
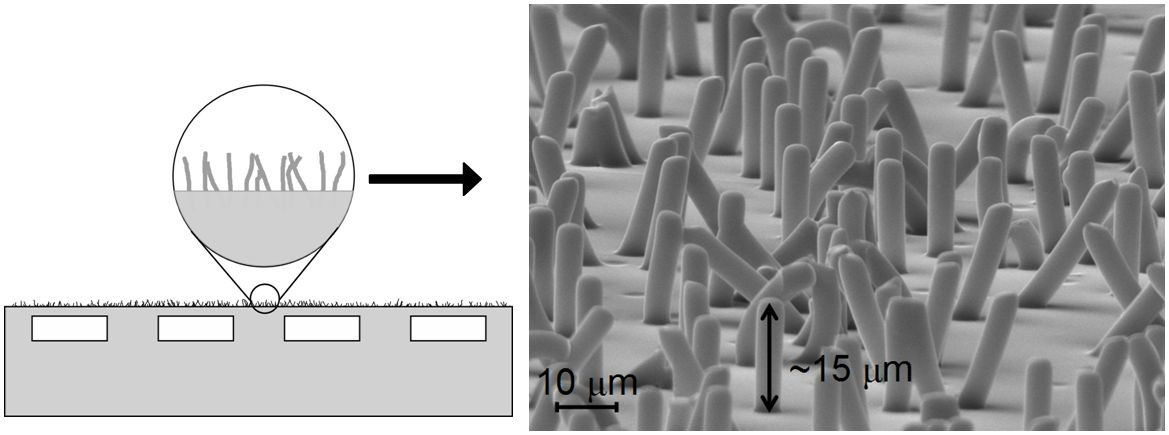
Eeff ≤ 100 kPa. Taking dimensions from the micrographs,
Figure 2A,B, and a suitable of value for the modulus of PDMS of about 2.6 MPa, it is possible to estimate the surface compliance of these two morphologies viewed as potential adhesives. Take a mean fibril as having length of 15 µm, diameter 5 µm and inclination to the surface of 10° suggests an individual element compliance of no more than
ca. 0.55 m N
−1. Estimating an areal density of fibrils at 2.5 × 10
9 m
−2 gives an effective surface modulus of 67 kPa. Analysis, for example, that by Smith [
9], indicates that the individual conical peaks of
Figure 2C will be much more resistant to buckling than cylindrical pillars of the same tip diameter and material and elastically stiffer by the same factor by which the base diameter exceeds the tip. Taking this ratio as 4 and a slightly lower areal feature density of 1.1 × 10
9 m
−2 gives a surface stiffness of these features as 174 kPa. These two values then rather neatly bracket the Dahlquist criterion.
In the same way, there is evidence of natural examples of fibrillar surfaces enhancing adhesion [
2,
3] so there is for conical protuberances being used to minimize adhesion. Many stick-insects possess tarsal heel pads (euplantulae) covered by arrays of conical, micron sized hairs (acanthae).
Figure 4E shows those of the stick-insect Carausius morosus. Acanthae are used mainly under compression and, although are capable of generating high friction, show negligible adhesion. This attribute of their behavior appears to be essential for the pads’ use in locomotion [
7].
The data presented thus far were all generated against the very smooth,
Rq < 10 nm, hard counterface of the top face of a beam splitter. The situation changes when the hard counterface becomes rougher. Topographies of this sort will exhibit markedly lower adhesion against smooth PDMS due to stored elastic energy within the deformed zone around the contact. This energy balance was explored, inter alia, by Fuller and Tabor [
10] who produced a modified adhesion parameter given by:
in which σ is the standard deviation of the surface roughness. This non-dimensional group can be interpreted as the ratio of the force needed to elastically indent a block of material with elasticity
E* to a depth
R by a sphere of radius
R to the potential adhesive force experienced by a sphere of that radius. Significant adhesion requires that θ is small, say θ < 0.1, and adhesion is substantially lost for values of θ > 5. For a glass lens of radius 18 mm, against a block of smooth PDMS, this would correspond to roughness of around 5 µm. This effect was investigated by roughening the surface of a glass lens by sand blasting to a value of 3.7 µm so that its adhesion to both a smooth and a fibrillar surface could be compared to the values obtained from the contact with a nominally smooth glass lens of the similar radius of curvature.
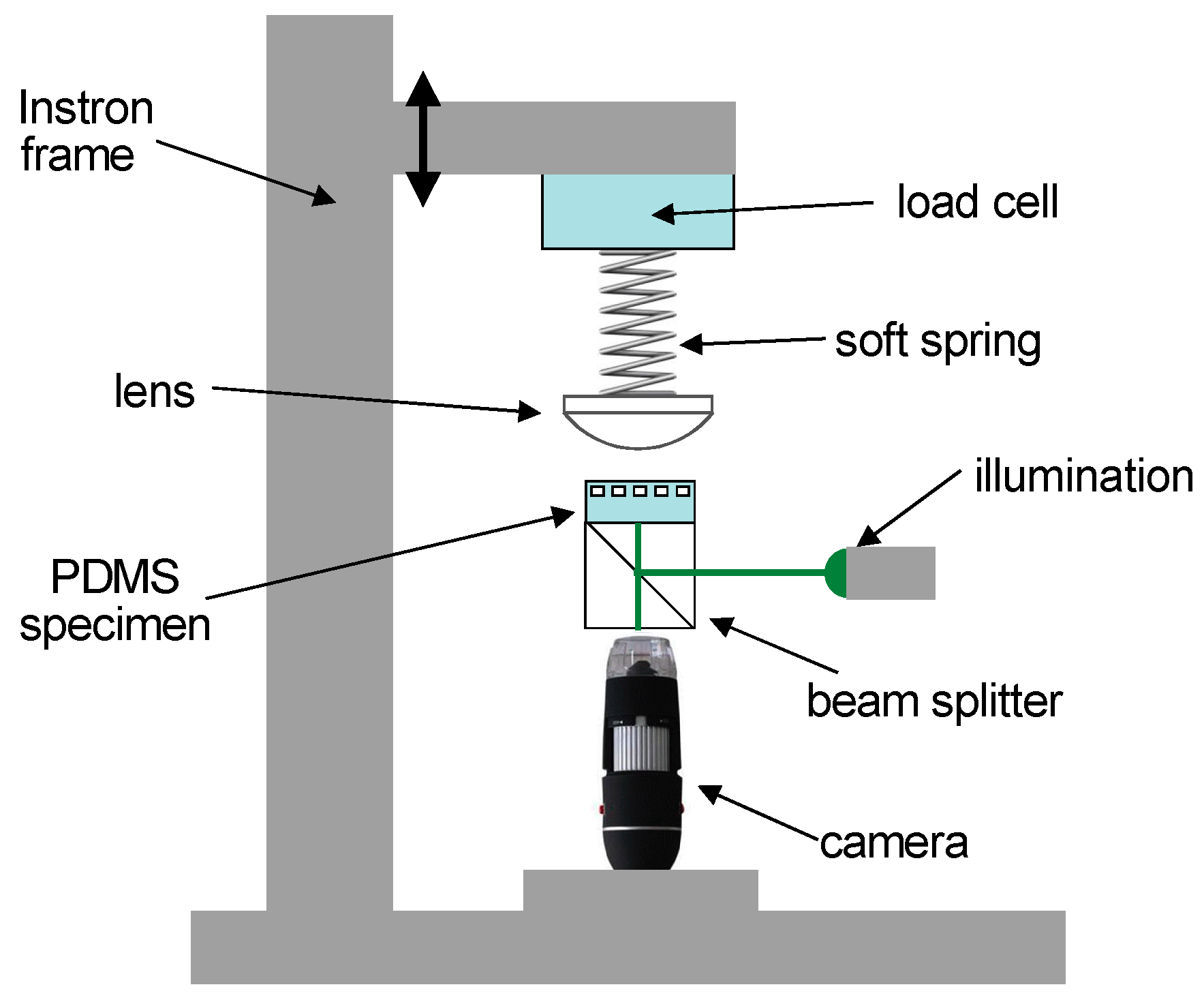
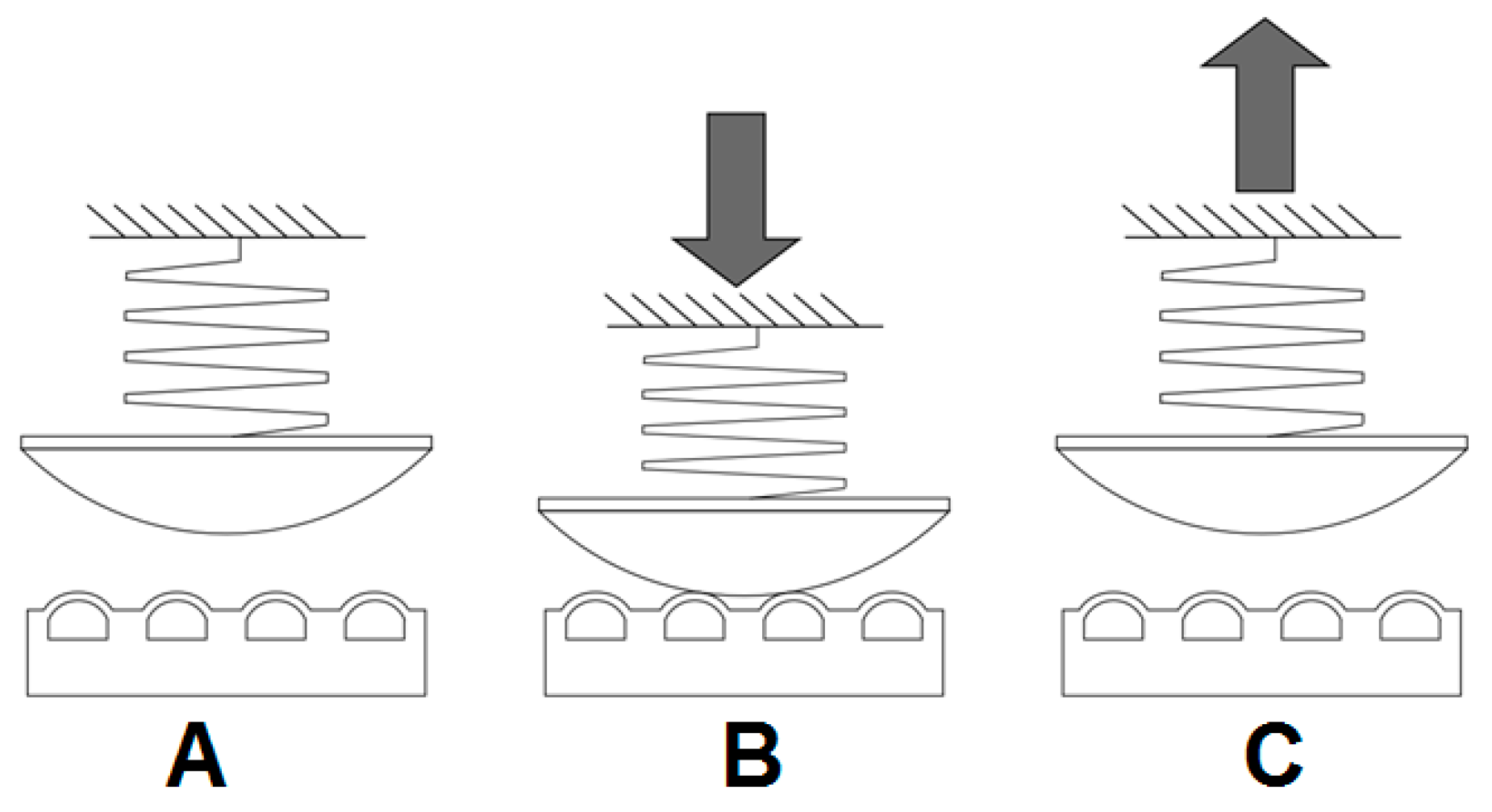
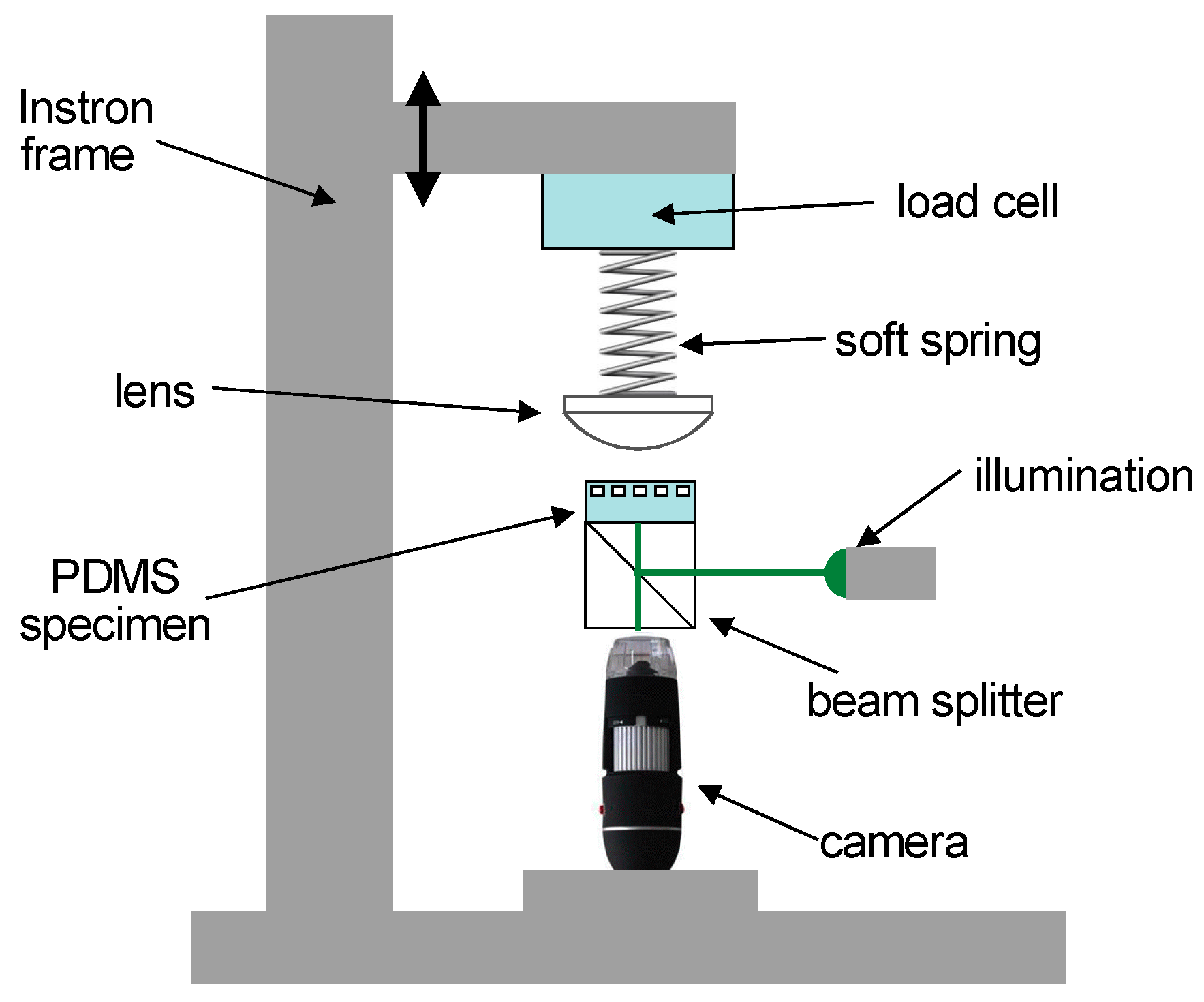
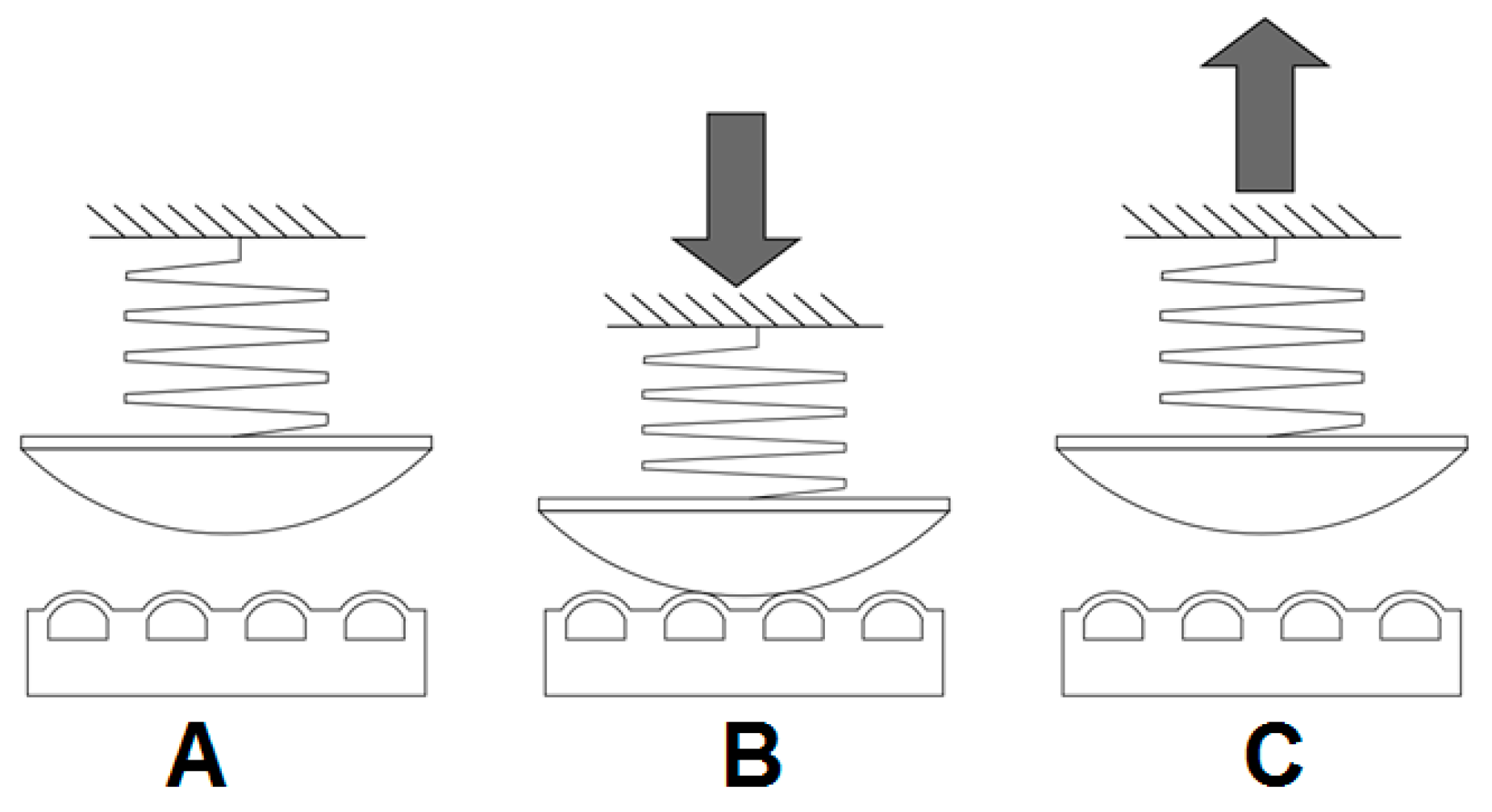
This set of adhesion tests followed the sequence illustrated in
Figure 5. The PDMS specimen, which could either be planar or initially pressurized to certain level to produce a change in its surface topography, was mounted on the upper surface of the beam splitter, as indicated in
Figure 3. The glass lens was then lowered into contact with the specimen at a machine cross-head speed of 5 μm s
−1, equivalent to a loading rate of 75 μN s
−1, up to a maximum load of 5 mN. The load was maintained for a dwell time of 60 s after which the lens was withdrawn at a cross-head rate of 5 μm s
−1 until a critical tensile load
Ppo produced detachment. The tensile force required for breaking the contact between the lens and the specimen was again taken as a measure of the adhesive properties of the surface.
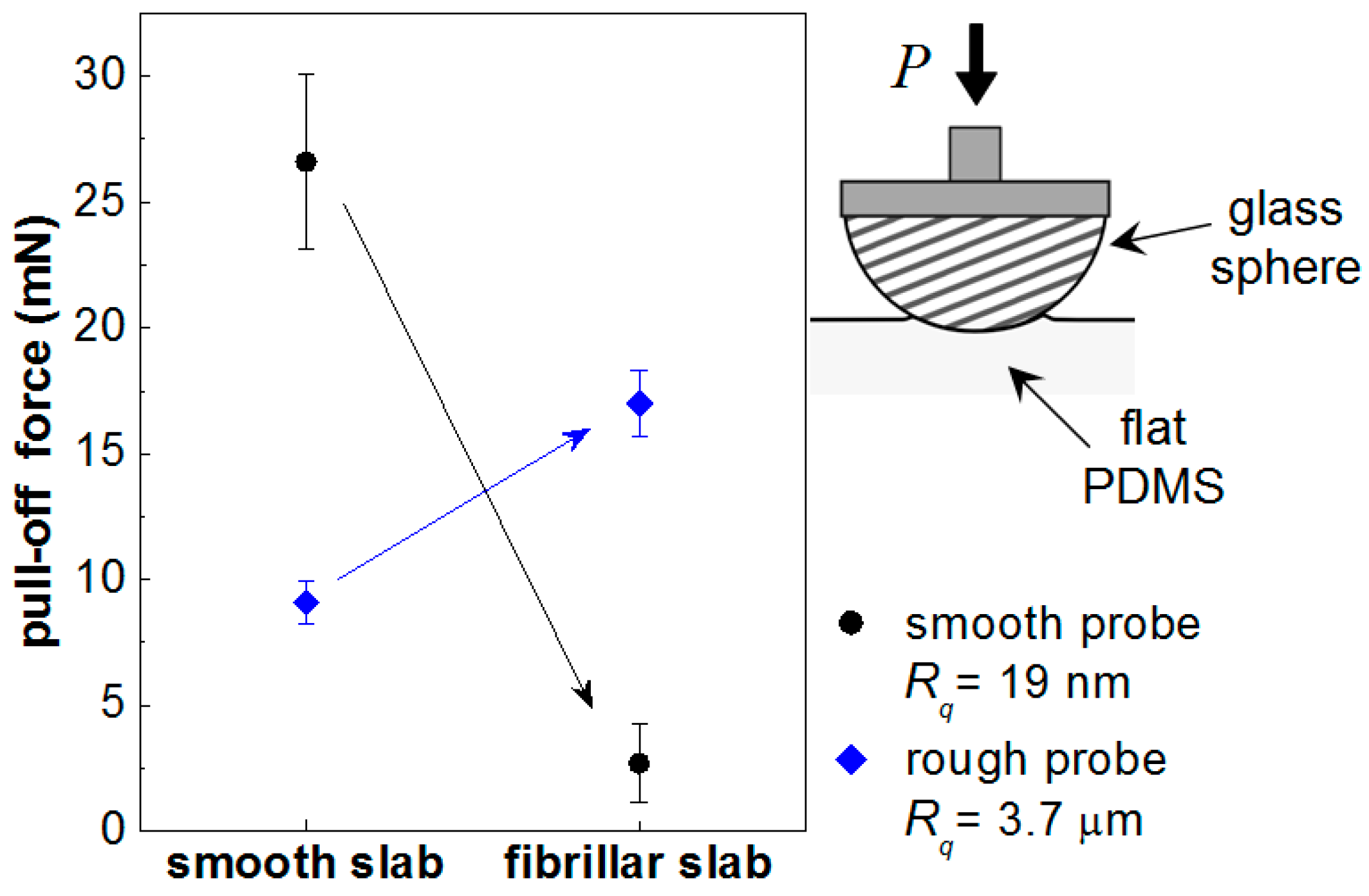
Figure 6 indicates the effect surface texture had on the observed pull-off forces against both smooth and rough glass lenses. Using the smooth polymer slab, roughening the glass counterface reduced measured adhesion from about 27 mN with the smooth lens to values of
ca. 9 mN,
i.e., a reduction of some 67%. The fibrillar PDMS surface had an even lower adhesive force measured against a smooth counterface at about 3 mN. On the other hand, adhesion between the rough glass surface and the fibrillar PDMS, at 17 mN, was very much more than with the smooth lens and nearly 63% of the value of adhesion between the two materials with smooth surfaces.
These results demonstrate that the interaction between adjacent contact spots that is responsible for the reduction in the overall adhesive force can be overcome, at least to some extent, if the softer surface exhibits an appropriate morphology to conform to the counterface topography. If individual adhered spots can be effectively isolated from their neighbors, for example by some form of compliant element, then the transfer of elastic energy from one region to another can be attenuated and adhesion maintained when the normal load is removed. When the fibrillar surface is loaded against a surface, smooth or rough, individual fibres, many of which are not perfectly normal to the surface, bend and buckle so acting as relatively weak, almost constant force, spring elements that store relatively little elastic energy. Consequently, when the surface is unloaded many of the small areas of intimate contact that have been formed, whether involving the tips or the flanks of the fibrils, remain intact and a level of macroscopic adhesion is maintained.
Switchable Adhesion
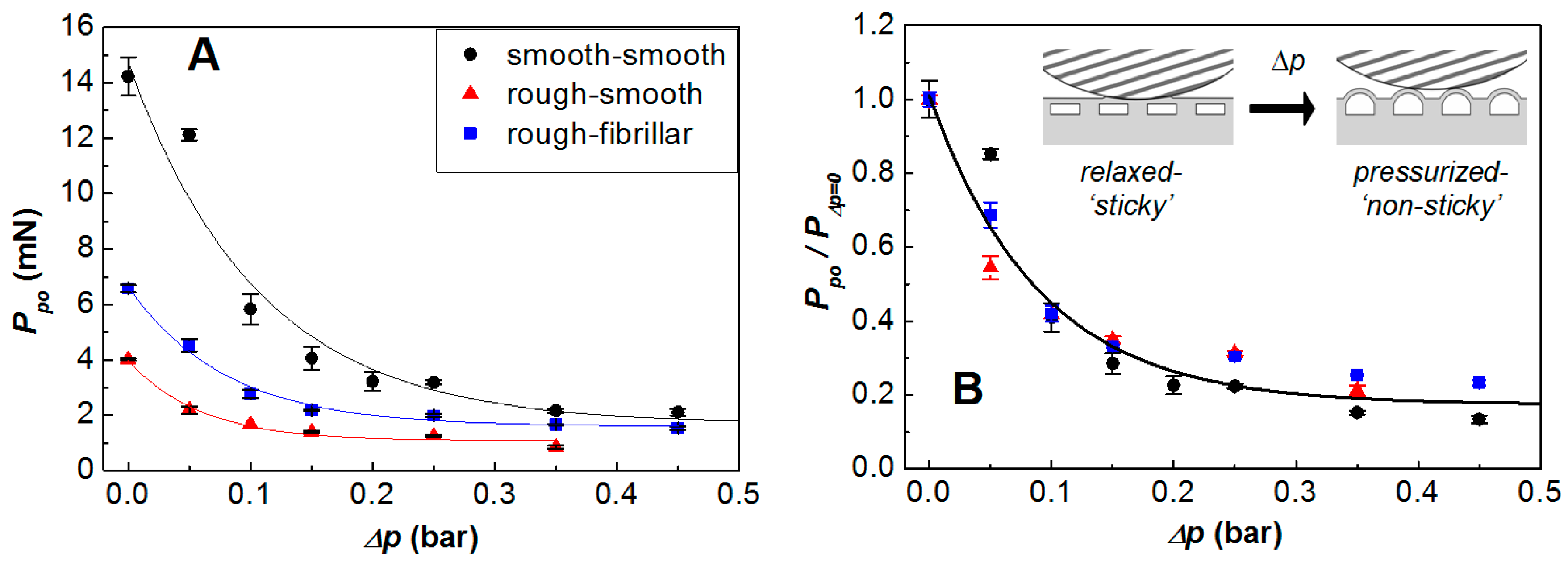
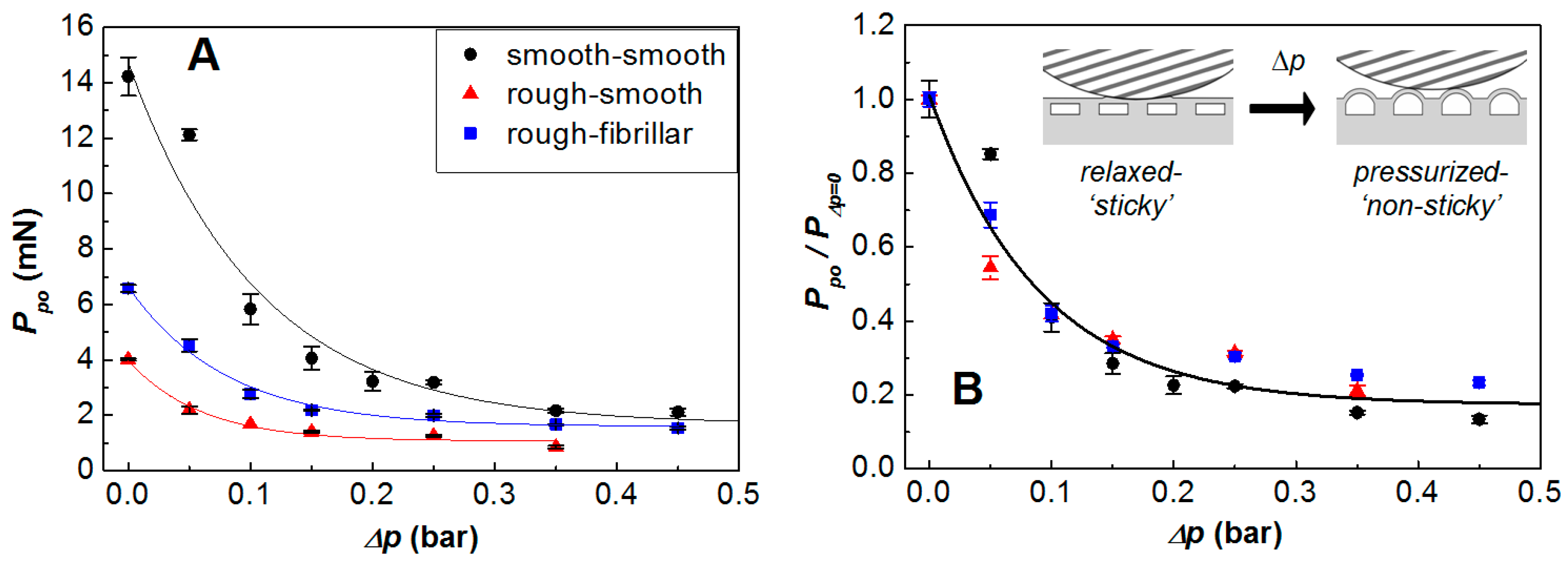
The presence of fibrils on the outer surface can be combined with sub-surface channels to retain some element of adhesive switchability by modifying the waviness (or long wavelength undulation) of the soft surface through pressurization of its subsurface structures in a similar manner as previously demonstrated for the contact between nominally smooth surfaces. This is illustrated by data shown in
Figure 7A. Against both smooth and rough glass counterfaces the introduction of a positive differential pressure of the order of 0.2 bar in the subsurface features of a specimen (in this case channel widths of 300 µm and gaps between channels of 200 µm) significantly reduces the adhesion of the surface. Removal of the pressure restores adhesion to the previous level.
Data in
Figure 7A are shown for experiments on specimens with each type of surface finish, smooth and fibrillar. The black circles show the results from a specimen with smooth surface measured against a smooth probe (
Rq~19 nm): these represent the control data set. The red triangles show the results from the same PDMS specimen with a smooth surface measured against the sand blasted probe (
Rq: 3.7 μm). The effect of the surface roughness is clearly observed in the reduction of about 70% of the adhesion of the surface in its relaxed state,
i.e., Δ
p = 0, from ~14 to 4 mN. The introduction of the fibrillar texture on the polymer specimen surface led to enhanced adhesion of the specimen in its relaxed or “sticky” state against the rough probe with a restoration of about 50% of the pull-off force between smooth surfaces.
Figure 7B presents the data sets in
Figure 7A normalized by the magnitude of adhesion from each surface in its relaxed state. A generalized reduction tendency of the adhesion force with increasing differential pressure can be described by the expression:
where
Pnpo is the normalized pull-off force and Δ
p the differential pressure applied to the subsurface features. This expression is similar to that previously found for specimens of a range of subsurface geometries and smooth surface finish of
[
1].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}