
Non-Destructive Evaluation of White-Flesh Dragon Fruit Decay with a Robot


1
Rural and Agri-Food Engineering Department, Universitat Politècnica de València, Camino de Vera s/n, 46022 Valencia, Spain
2
Instituto de Automática e Informática Industrial, Universitat Politècnica de València, Edificio 8G, Acceso D, 1a Planta, Camino de Vera s/n, 46022 Valencia, Spain
*
Author to whom correspondence should be addressed.
Horticulturae 2023, 9(12), 1286; https://doi.org/10.3390/horticulturae9121286
Submission received: 30 October 2023
/
Revised: 26 November 2023
/
Accepted: 27 November 2023
/
Published: 30 November 2023
(This article belongs to the Section Postharvest Biology, Quality, Safety, and Technology)
Abstract
:Dragon fruit is a tropical fruit with significant potential for consumers and producers. The quality assurance of this high-value product is crucial to satisfy consumer expectations. The quality of imported dragon fruit after storage may deteriorate due to inappropriate storage conditions. The firmness of dragon fruit is an essential parameter to estimate its conditions, and it is usually measured by destructive testing. The objective of the present study is to develop and test a non-destructive robotic sensor for assessing dragon fruit quality related to texture deterioration. Sixty white-fresh dragon fruits obtained from a store were divided in two sets of thirty fruits and stored 48 h at different conditions (cold and room storage) to produce deteriorated and consumer-acceptable fruits. First, the fruit samples were assessed non-destructive with the force sensor of a collaborative robot while they were touched. The robot tool is a pad capable of adapting and copying fruit shapes while controlling its hardness with the jamming transition of its internal granular fill. Second, the fruits were evaluated with destructive tests such as fruit firmness, flesh firmness, and soluble solid content. The procedure followed to produce deteriorated and acceptable fruits were confirmed. A discriminant analysis was carried out to segregate the fruit between the two categories according to the non-destructive variables extracted from the sensor. The variables obtained from the robotic first slope (S1) and the difference between the maximum value and the first overshoot (Os) were significant predictors for the separation in the two quality categories. Promising results were obtained with 77.50% of well classified fruit from the model data set, and 84.21% from the validation data set. The use of the robot could be an efficient tool in evaluating the quality of dragon fruit. This process may lead to substantial savings, particularly considering the elevated cost associated with the importation of tropical fruits into the European market.
1. Introduction
The white-flesh dragon fruit (Hylocereus undatus) is a non-climacteric fruit that thrives in tropical climates. Its unique combination of appealing taste, nutritional benefits, and visually striking appearance positions it as a fruit with significant potential for both consumers and producers alike [1,2]. Dragon fruit has been proven to be a healthy and nutritious fruit due to its vitamins, minerals, complex carbohydrates, dietary fibers, and antioxidants [3]. Originally native from Mexico and Central America, it has been currently expanded to Southeast Asia, Europe, and the United States [4]. In Europe, it is offered as an expensive exotic fruit. This fact, together with the favorable climate conditions, is encouraging Spanish farmers from the warm Mediterranean coast, to grow this subtropical crop. However, consumers demand higher levels of safety and quality of fruit products, and therefore demand a wide array of quality attributes [5]. During the commercialization of fresh products, the quality can be reduced before reaching the consumer, especially in the phase from the producer facilities to the wholesaler storage chambers [6]. Quality-control procedures could be necessary to assure the high quality of imported fruit, even though defining the quality of fresh horticultural products has been a challenging task [7]. Several definitions and concepts related to the quality of fruits and vegetables have been provided by different authors [8]. For example, some attributes related to fruit quality are based on the intrinsic and extrinsic characteristics of the products. The demand for food quality assurance has increased in the last years, requiring new techniques for in-line quality control [9]. Different techniques have been developed to non-destructively assess fruit quality. These methodologies require the utilization of real-time, dependable, and non-intrusive technologies [10]. Among them, near-infrared spectroscopy (NIRS) has emerged as a powerful tool for non-destructive fruit quality analysis [11]. NIRS technology utilizes the absorption of near-infrared light to analyze the chemical composition of fruit, providing valuable insights into parameters like sugar content, moisture levels, and acidity. Its non-invasive nature allows for continuous monitoring and has significantly reduced the need for destructive sampling. Hyperspectral imaging combines the principles of spectroscopy and imaging to assess fruit quality. It captures a wide range of spectral information, enabling the identification of subtle variations in fruit attributes [12,13]. This technology is particularly useful for detecting defects, bruises, and ripeness levels in real-time, thus minimizing post-harvest losses [14].
Firmness in dragon fruits is an essential parameter that influences consumer preferences, shelf life, and post-harvest handling decisions [1,15,16]. In dragon fruit, firmness is crucial to determine the harvesting time [17]. Texture of dragon fruit changes after harvest with a decrease in fruit firmness, this is due to the disintegration of the cell wall and largely related to the activity of cell wall degrading enzymes [18]. When the fruit are very soft, handling and transportation could be difficult due to the increase of damage susceptibility that will reduce market value of the fruit. The postharvest deterioration of dragon fruit quality limits its commercial and edible value [18].
Force-deformation curves have been employed for assessing fruit firmness, usually destructively, and measured with a portable penetrometer or a universal testing machine. Manual devices have been proposed for assessing dragon fruit firmness, ref. [19] indicated two different destructive instruments to assess dragon fruit firmness, Effigi Penetrometer for flesh firmness and Imada Penetrometer for skin and flesh textural responses. Despite the fact that many different systems and prototypes have been proposed for fruit firmness mechanical assessment, correlations between firmness measured by mechanical-based methods and the reference puncture firmness are poor, and optical methods have obtained limited results too [20].
Pneumatic jamming pads impact with ultra-low pressures have been shown to be a promising technique for assessing fruit firmness of very delicate fruits [21]. Robotic tactile sensing has been proposed as a prospective tool for achieving precise physical manipulation tasks and extracting physical parameters such as firmness [22,23], but no robot force control signal has been used for fruit assessment yet. Some recent researchers have used extrinsic tactile sensors in robot grippers applying low forces. Microforce tactile sensors sliding along the fruit surface assessed the ripeness of apples and strawberries in two categories [24]. Several force-sensitive resistors added to a gripper’s fingers could identify different fruits [25]. With intrinsic tactile sensors [26] equipped with accelerometers in robot gripper fingers, the firmness of fruits and vegetables was assessed while they were grasped.
This study aims to analyze how dragon fruit degrades under incorrect storage conditions and to use the robot’s internal force sensor to predict this degradation in a non-destructive manner.
2. Materials and Methods
Fruit material was obtained from a wholesaler in Spain from the production area in Vietnam (transported by plane). Sixty fruits were selected based on the absence of physical damage, lack of disease or infection, and uniformity of color and size. They were divided into two sets of thirty similar fruits and then weighted. The two sets were stored for 48 h at different storage conditions: cold storage and room storage. The set A was stored at cool chamber conditions (6 °C, 85% RH) and the set B was stored at room conditions (25 °C, 65% RH). After the storage treatment, the fruits were taken to the robotics laboratory and tested with the robotic impact device (Figure 1).
The information of the internal force sensor of a collaborative robot UR5e (Universal Robot, Odense, Denmark) was used as a tactile sensor to estimate the product decay. This sensor has six degrees of freedom and is located just before its Tool Center Point (TCP). The robot has functions to establish an internal control motion to ensure its TCP can achieve the desired force value. In this case, a gain adjustment of 1.5 and damping with a value of 0.01 were applied, and the nominal reference value was set at 20 N for vertical forces. The adjustments were deduced from experimental results to achieve an underdamped response.
Dragon fruits have irregular surface shapes and are sensitive to damage if excessive pressure is applied to their surface. The robot TCP has a small silicone pad filled with granular fluid to prevent dragon fruit damage. The granular fluid within the pad suffers a jamming transition by changing its pressure. The soft state is when its pressure equals or exceeds the external (quasi-liquid). Granular particles can move freely. The soft state is when the pressure is lower than the external (quasi-solid). Granular particles collapse and cannot move freely. The control of this pad is accomplished through a vacuum generator (VADMI-300-LS-P Festo, Esslingen, Germany). The dragon fruits rested on a bed of powdered flour to prevent damage from hard contact with the table.
The robot was positioned with its sixth axis vertically above the dragon fruit. The robot was programmed to descend at 0.1 ms in force control mode to reach a force of 20 N on the fruit. During the movement, overpressure was generated in the pad by activating the vacuum generator with a digital output for 0.5 s, being the pad soft before it contacts the dragon fruit. The robot reaches the desired force after a waiting period. The pad’s surface copies the shape of the dragon fruit’s surface. Then, the robot activates the vacuum, and the pad transitions to a rigid state, conforming to the contact area on the dragon fruit. The robot moved vertically up 50 mm and descended again in force control mode to achieve a force of 20 N on the product. At the same time, the vertical force signal was sent via Ethernet to a LabVIEW program (National Instruments, Austin, TX, USA). After 2 s, the signal usually reaches a steady state. The robot returns to its initial position and stops transmitting information. Figure 2 shows the whole process of the robot program, devices and communication paths.
Sensor information is acquired through Ethernet sockets using LabVIEW (National Instruments, Austin, TX, USA). The vertical forces were sampled at 500 Hz. The signal processing was also performed with LabVIEW, from which the parameters of the force-time curves are deduced. Figure 3 shows an example signal for both room storage and cold storage dragon fruits.
The parameters extracted from the robotic sensor signal were: maximum force (), first slope (), second slope (), the first overshoot () Equation (1), and the steady-state () (Figure 3).
After the non-destructive robotic measurements were finished, weight, whole and pulp fruit firmness, soluble solid content and titratable acidity were tested. Weight loss was measured using a digital balance (Mettler Toledo AL104 electronic balance, Im Langacher 44, 8606 Greifensee, Switzerland). Fruit weight was measured before storage and after storage. The firmness was measured using a universal stress strain machine (Ibertest, model IBTH 2730, www.ibertest.es (accessed on 28 November 2023)), with a constant speed of 1.67 ms. The firmness of each fruit was measured at three points of the equatorial area by using an 0.008 m probe, with (whole fruit firmness) and without peel (fruit flesh firmness). Three repetitions were carried out per test and fruit.
The dragon fruits were juiced individually using a blender, and the filtered liquid was used to measure chemical parameters. Soluble solid content was determined with a digital refractometer (Atago model PAL-3; Atago Co., Tokyo, Japan). Tritatable acidity was measured with an automatic titrator (Mettler Toledo AL104 electronic balance, Im Langacher 44, 8606 Greifensee, Switzerland).
The statistical analysis was performed with a commercially available software package (Statgraphics Centurion 18 Software, version 18.1.13 (Statgraphics Technologies, Inc., The Plains, VA, USA)). One-way analysis of variance was used to assess the effect of the treatments on the destructive measured variables (weight loss, whole and pulp fruit firmness, and soluble solid content). Step-by-step discriminant analysis (based on the variables firmness, weight loss and soluble solid; and based on the non -destructive variables extracted from the robotic sensor) were used.
3. Results
The external appearance of the room temperature storage fruit was visually acceptable and a little more red-colored than the cold storage fruits (Figure 4). No significant differences were found between the two sets in measured weight (g).
In a first step, the capability of the procedure to create two different fruit categories was studied. Significant differences were found in the effect of the factor set (cold storage and room storage) on the variables related to firmness (Whole Fruit Firmness and Fruit Flesh Firmness) and weight loss, Table 1, Figure 5, Figure 6, Figure 7 and Figure 8. However, no significant differences were found in the soluble Solid Content (p value > 0.05).
A step-by-step discriminant analysis based on the variables related to firmness, weight loss and soluble solid content was addressed achieving a 94.35% of well classified fruit (Figure 9). This classification confirmed the internal decay of the fruit stored at room temperature, compared to the fruit stored in the cool chamber. Finally, the two sets were classified as two quality categories: Acceptable Fruit (A) and Deteriorated Fruit (D).
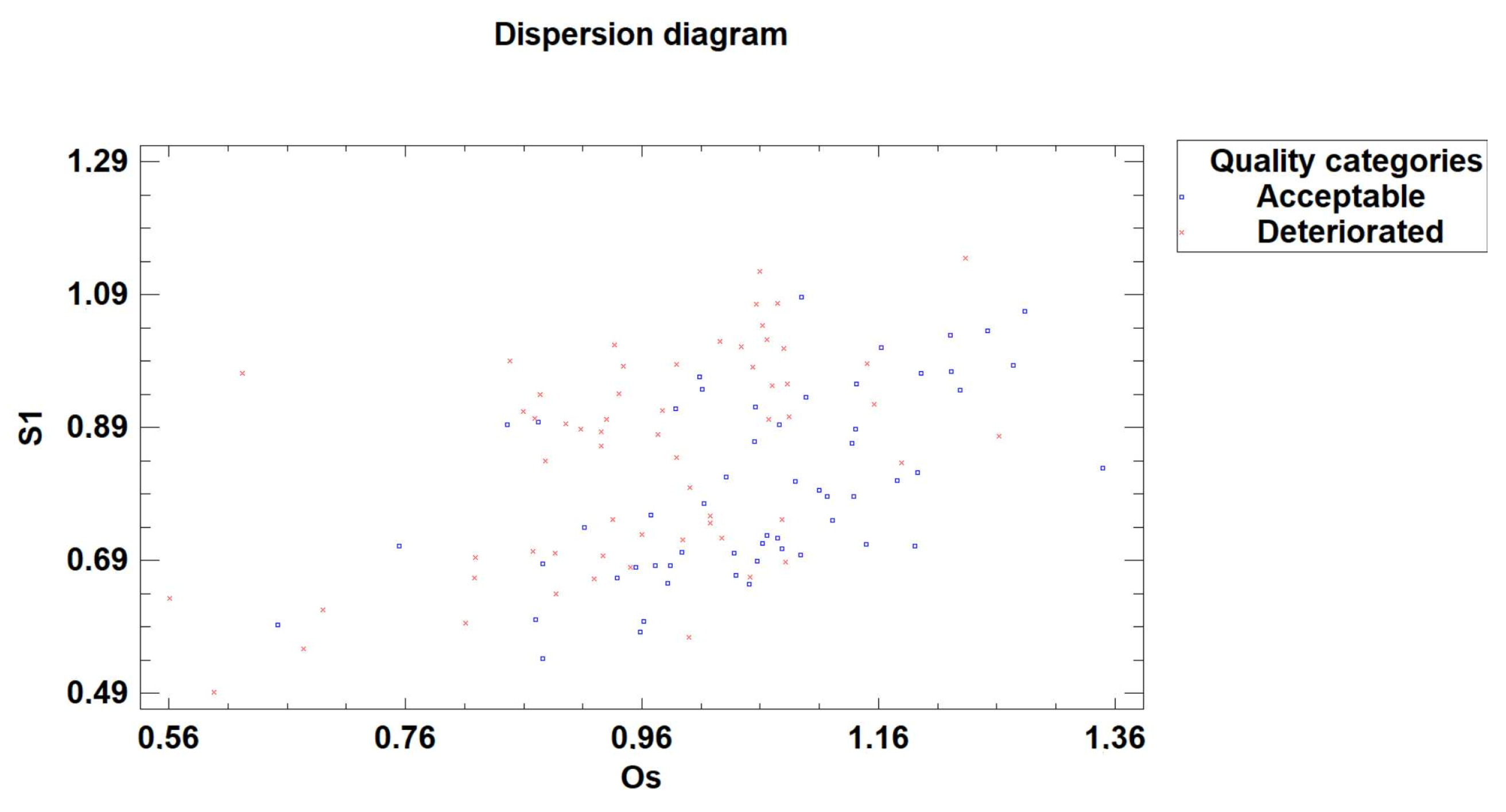
In a second step, once the difference in quality of the two sets was corroborated (acceptable and deteriorated fruit), a classification model of the two categories based on the non-destructive parameters was carried out using a step-by-step discriminant analysis with the robotic sensor parameters. Two thirds of the data set were aleatory selected to build the model while the rest one third of the data set was used to validate the model. The variables obtained from the robotic first slope () and the difference between the maximum value and the first overshoot () were significant predictors for the separation in the two quality categories (acceptable fruit and deteriorated fruit), Equation (2), Figure 10.
The percentage of well-classified fruits from the model data set was 77.50%. Furthermore, related to the validation data set, the validation accuracy obtained was 84.21%.
4. Discussion
Non-destructive analysis of fruit quality is a challenging objective. In a first place, the definition of fruit quality could be confusing, objectively measurable quality attributes have to be selected. A reference destructive analysis method needs to be established. Sensory attributes, evaluated by an expert sensory panel, are usually considered as a reliable reference measurement. The attributes related to fruit texture (whole fruit and flesh), external and internal color, and taste (sugar and acidity) are commonly considered associated to the quality of fresh horticultural products. However, the procedure with expert sensory panels is laborious and time consuming. In this line, mechanical and chemical destructive tests have also been proposed to assess fruit quality attributes. Texture analysis using a universal testing machine with a compression test is an acknowledged analysis to asses firmness attribute of fresh fruits. Determination of soluble solid content and tritatrable acidity of the fruit juice is also a common approach to asses fruit juice quality relate to fruit taste.
A non-destructive sensor fixed in a robotic arm for assessing postharvest dragon fruit quality has been proposed. The validation of the proposed non-destructive devise is based on the forced segregation of fruits in two postharvest categories (acceptable and deteriorated fruit). A percentage of well classified fruit of more than 77% has been found based on two variables obtained from the robotic sensor signal. Other authors using discriminant analysis reported percentages of well classified fruits around these values when discriminating fruits according to non-destructive variables. Classification methods are crucial in fruit quality assurance, contributing to the precision and reliability of assessments. However, the implementation of these methods is complicated. Various classification approaches have been used in fruit quality assurance, ranging from traditional rule-based systems to modern machine learning algorithms. While traditional methods rely on predetermined rules and human expertise, machine learning models, such as support vector machines and neural networks, leverage vast datasets to autonomously learn and classify fruits based on multiple attributes. One of the primary difficulties in classification methods lies in achieving standardized datasets. Fruits exhibit inherent variability in size, color, and texture across different varieties and even within the same crop. Creating comprehensive and representative datasets that include this diversity is a difficult task, impacting the ability of algorithms to generalize across various fruit types. Ensuring the robustness and adaptability of classification algorithms poses another challenge. A model trained on one set of fruits could have difficulties when applied to a different variety or when faced with variations in environmental conditions. Developing algorithms that can adapt to these changes while maintaining high accuracy is an area of research and development still in progress. Imbalances in datasets, where certain fruit types are underrepresented, can lead to biased models. Addressing this issue is crucial for ensuring fair and accurate classification across the entire spectrum of fruits. Techniques such as oversampling, undersampling, or employing ensemble methods are employed to mitigate these imbalances. Previous authors proposed classification models related to fruit structure according to time-resolved reflectance spectroscopy providing percentages of correctly classified fruit of about 70% [26]. In a previous study [27] separated 180 apples in four ripeness levels based on color coordinates. They found a correct classification rate of 93.72% after 1000 iterations selecting 30% of the samples in each interaction.
In the present study, it is important to remark that the method used to define fruit quality could include certain inaccuracies. It is essential to understand the level of accuracy and precision of the previously validated destructive technique, as identifying an appropriate reference method can be challenging. The reference method based on destructive firmness (using a standard test with a universal-test machine) and soluble solid content (sugar) has been widely accepted. However, even accepted reference methods may have limitations. Nonetheless, the proposed non-destructive technique is capable of classifying dragon fruit into two categories and identifying the deteriorated fruits. The tested fruits had a similar external appearance, and the significantly different measured weight loss was not externally appreciated. However, the external color measurement could have improved the classification analysis. Nine false negatives (fruits classified as Deteriorated while they had been stored in the cold chamber) and six false positives (fruits classified as Acceptable while they had been stored at room temperature) were obtained. This procedure is crucial considering the high price of these imported tropical fruits in Europe. This identification of non-acceptable dragon fruit could be very interesting to avoid deteriorated fruit arriving to the consumer. Besides, the definition of destructive and non-destructive techniques and parameters to assess dragon fruit quality are especially important to promote the production of dragon fruit in some Mediterranean areas in Europe.
5. Conclusions
A procedure to force two different internal quality categories in white flesh dragon fruit has been corroborated using destructive fruit quality parameters as whole fruit firmness, flesh fruit firmness and soluble solid content. A discriminant analysis based on these parameters and weight loss resulted in 94.50% well classified fruits in the two categories defined (Acceptable fruit and Deteriorated fruit).
The signal of a force sensor in a robot has been used to assess dragon fruit quality non-destructively. Without damaging any fruit, a discriminant analysis of the first slope and the overshoot led to promising results for the percentage of well-classified fruits above 77%. This procedure may lead to substantial savings, especially considering the high price of these tropical fruits imported into the European market. The robot information is efficient in evaluating the dragon fruit decay.
The integration of other sensor technologies, including spectrometry and hyperspectral imaging, could improve the reliability of the non-destructive quality classification methods. The adoption of advanced non-destructive fruit quality measurement techniques represents a significant advancement in agriculture. These technologies can offer precision, efficiency, and objectivity in assessing fruit quality, leading to reduce waste, improve product consistency, and increase profitability for growers. Further research should be directed towards improving the proposed technique with more dragon fruit samples, other varieties, and a wider range of ripeness stages.
Author Contributions
Conceptualization C.O.; methodology, C.O. and C.B.; software, C.O. and C.B.; validation, C.O. and P.G.-P.; formal analysis, C.O., C.B. and F.R.-M.; investigation, C.O., C.B. and P.G.-P.; resources, C.O. and F.R.-M.; data curation, C.O., C.B. and P.G.-P.; writing—original draft preparation, C.O.; writing—review and editing, C.O., C.B., P.G.-P. and F.R-M.; visualization, C.O., C.B. and P.G.-P.; supervision, C.O. and F.R.-M.; project administration, C.O. and F.R.-M.; funding acquisition, C.O. and F.R.-M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Valencia Government (Spain) through the projects “INTEGRACIÓN DE SISTEMAS AGRONÓMICOS Y FOTOVOLTAICOS PARA LA PRODUCCIÓN INTELIGENTE DE CULTIVOS MEDITERRÁNEOS Y SUBTROPICALES (INNEST/2022/115)” and “RECOLECCIÓN INTELIGENTE Y AUTOMATIZADA DE CULTIVOS DE ALTO VALOR EN INVERNADEROS SOSTENIBLES (INNEST/2023/106)”. The authors are most grateful to CANSA-FRESH for providing the fruit samples.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Magalhães, D.S.; da Silva, D.M.; Ramos, J.D.; Pio, L.A.S.; Pasqual, M.; Vilas Boas, E.V.B.; Galvão, E.C.; de Melo, E.T. Changes in the physical and physico-chemical characteristics of red-pulp dragon fruit during its development. Sci. Hortic. 2019, 253, 180–186. [Google Scholar] [CrossRef]
- Verona-Ruiz, A.; Urcia-Cerna, J.; Paucar-Menacho, L.M. Pitahaya (Hylocereus spp.): Culture, physicochemical characteristics, nutritional composition, and bioactive compounds. Sci. Agropecu. 2020, 11, 439–453. [Google Scholar] [CrossRef]
- Hossain, F.M.; Numan, S.M.N.; Akhtar, S. Cultivation, nutritional value, and health benefits of Dragon Fruit (Hylocereus spp.): A Review. Int. J. Hortic. Sci. Technol. 1988, 8, 259–269. [Google Scholar]
- Pérez, A.L.D.Á.; Garay, A.V.A.; Gutiérrez, R.G.R.; Rangel, P.P. Elements to improve the management and commercialization of dragon fruit (Hylocereus undatus (Haworth) DR Hunt). Agro Product. 2023, 2, 129–135. [Google Scholar] [CrossRef]
- Moser, R.; Raffaelli, R.; Thilmany, D.D. Consumer preferences for fruit and vegetables with credence-based attributes: A review. Int. Food Agribus. Manag. Rev. 2011, 14, 121–142. [Google Scholar]
- Omar, A.F.; MatJafri, M.Z. Principles, methodologies and technologies of fresh fruit quality assurance. Qual. Assur. Saf. Crop. Foods 2013, 5, 257–271. [Google Scholar] [CrossRef]
- Abbott, J.A. Quality measurement of fruit and vegetables. Postharvest Biol. Technol. 1999, 15, 207–225. [Google Scholar] [CrossRef]
- Kyriacou, M.C.; Rouphael, Y. Towards a new definition of quality for fresh fruits and vegetables. Sci. Hortic. 2018, 234, 463–469. [Google Scholar] [CrossRef]
- Cortés, V.; Blasco, J.; Aleixos, N.; Cubero, S.; Talens, P. Monitoring strategies for quality control of agricultural products using visible and near-infrared spectroscopy: A review. Trends Food Sci. Technol. 2019, 85, 138–148. [Google Scholar] [CrossRef]
- Magwaza, L.S.; Opara, U.L. Analytical methods for determination of sugars and sweetness of horticultural products—A review. Sci. Hortic. 2015, 184, 179–192. [Google Scholar] [CrossRef]
- Magwaza, L.S.; Opara, U.L.; Nieuwoudt, H.; Cronje, P.J.; Saeys, W.; Nicolaï, B. NIR spectroscopy applications for internal and external quality analysis of citrus fruit—A review. Food Bioprocess Technol. 2012, 5, 425–444. [Google Scholar] [CrossRef]
- Wieme, J.; Mollazade, K.; Malounas, I.; Zude-Sasse, M.; Zhao, M.; Gowen, A.; Van Beek, J. Application of hyperspectral imaging systems and artificial intelligence for quality assessment of fruit, vegetables and mushrooms: A review. Biosyst. Eng. 2022, 222, 156–176. [Google Scholar] [CrossRef]
- Lu, Y.; Saeys, W.; Kim, M.; Peng, Y.; Lu, R. Hyperspectral imaging technology for quality and safety evaluation of horticultural products: A review and celebration of the past 20-year progress. Postharvest Biol. Technol. 2022, 170, 111318. [Google Scholar] [CrossRef]
- Mei, M.; Li, J. An overview on optical non-destructive detection of bruises in fruit: Technology, method, application, challenge and trend. Comput. Elect. Agric. 2023, 213, 108195. [Google Scholar] [CrossRef]
- Wanitchang, J.; Terdwongworakul, A.; Wanitchang, P.; Noypitak, S. Maturity sorting index of dragon fruit: Hylocereus polyrhizus. J. Food Eng. 2010, 100, 409–416. [Google Scholar] [CrossRef]
- Singh, A.; Swami, S.; Panwar, N.R.; Kumar, M.; Shukla, A.K.; Rouphael, Y.; Kumar, P. Development changes in the physicochemical composition and mineral profile of red-fleshed dragon fruit grown under semi-arid conditions. Agronomy 2022, 12, 355. [Google Scholar] [CrossRef]
- Tavarini, S.; Degl’innocenti, E.; Remorini, D.; Massai, R.; Guidi, L. Polygalacturonase and B-galactosidase activities in Hayward kiwifruit as affected by light exposure, maturity stage and storage time. Sci. Hortic. 2009, 120, 342–347. [Google Scholar] [CrossRef]
- Huang, M.; Zhao, J. Recent advances in postharvest storage and preservation technology of pitaya (dragon fruit). J. Hortic. Sci. Biotechnol. 2023, 1–15. [Google Scholar] [CrossRef]
- Woolf, A.; Hien, D.M.; Hoa, T.T.; Jackman, R.; Clark, C. HortResearch and SOFRI. Dragon Fruit Assessment Manual; SOFRI: Tien Giang, Vietnam, 2006; ISBN 0-478-06839-5. [Google Scholar]
- Tian, S.; Xu, H. Mechanical-based and optical-based methods for nondestructive evaluation of fruit firmness. Food Rev. Int. 2023, 39, 4009–4039. [Google Scholar] [CrossRef]
- Ortiz, C.; Blanes, C.; Mellado, M. An ultra-low pressure pneumatic jamming impact device to non-destructively assess cherimoya firmness. Biosyst. Eng. 2019, 180, 161–167. [Google Scholar] [CrossRef]
- Mandil, W.; Rajendran, V.; Nazari, K.; Ghalamzan-Esfahani, A. Tactile-Sensing Technologies: Trends, Challenges and Outlook in Agri-Food Manipulation. Sensors 2023, 23, 7362. [Google Scholar] [CrossRef] [PubMed]
- Blanes, C.; Mellado, M.; Beltrán, P. Tactile sensing with accelerometers in prehensile grippers for robots. Mechatronics 2016, 33, 1–12. [Google Scholar] [CrossRef]
- Ribeiro, P.; Cardoso, S.; Bernardino, A.; Jamone, L. Fruit quality control by surface analysis using a bio-inspired soft tactile sensor. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020. [Google Scholar]
- Zhang, J.; Lai, S.; Yu, H.; Wang, E.; Wang, X.; Zhu, Z. Fruit Classification Utilizing a Robotic Gripper with Integrated Sensors and Adaptive Grasping. Math. Probl. Eng. 2021, 2021, 7157763. [Google Scholar] [CrossRef]
- Rizzolo, A.; Vanoli, M.; Spinelli, L.; Torricelli, A. Sensory characteristics, quality and optical properties measured by time-resolved reflectance spectroscopy in stored apples. Postharvests Biol. Technol. 2010, 58, 1–12. [Google Scholar] [CrossRef]
- Pourdarbani, R.; Sabzi, S.; Kalantari, D.; Karimzadeh, R.; Ilbeygi, E.; Arribas, J.I. Automatic non-destructive video estimation of maturation levels in Fuji apple (Malus Malus pumila) fruit in orchard based on colour (Vis) and spectral (NIR) datag. Biosyst. Eng. 2020, 195, 136–151. [Google Scholar] [CrossRef]
Figure 1.
Robotic impact device.
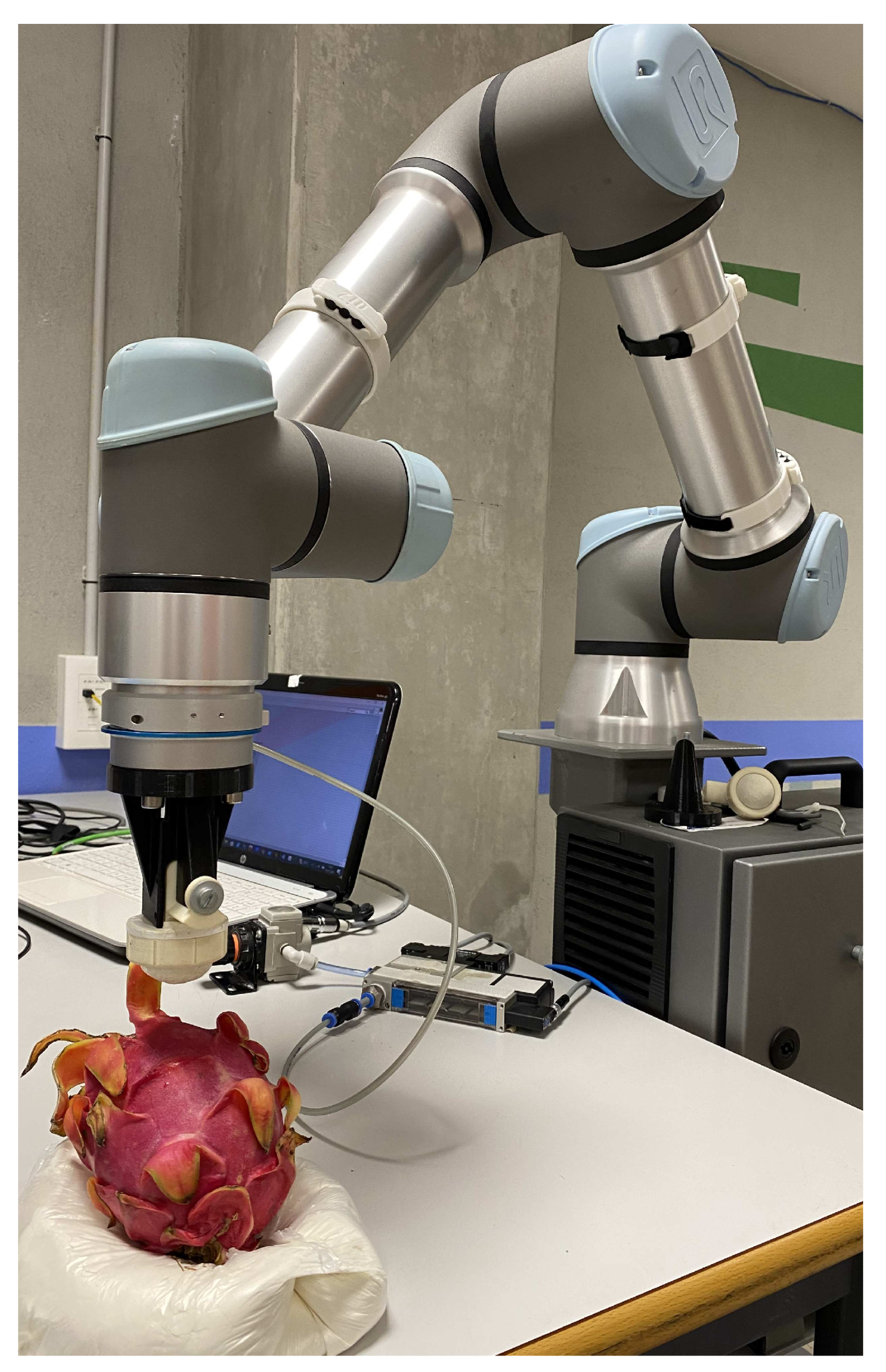
Figure 2.
Flow chart of the operational process of the robot arm, related devices, and communication paths (Vacuum Generator (VC)).
Figure 2.
Flow chart of the operational process of the robot arm, related devices, and communication paths (Vacuum Generator (VC)).
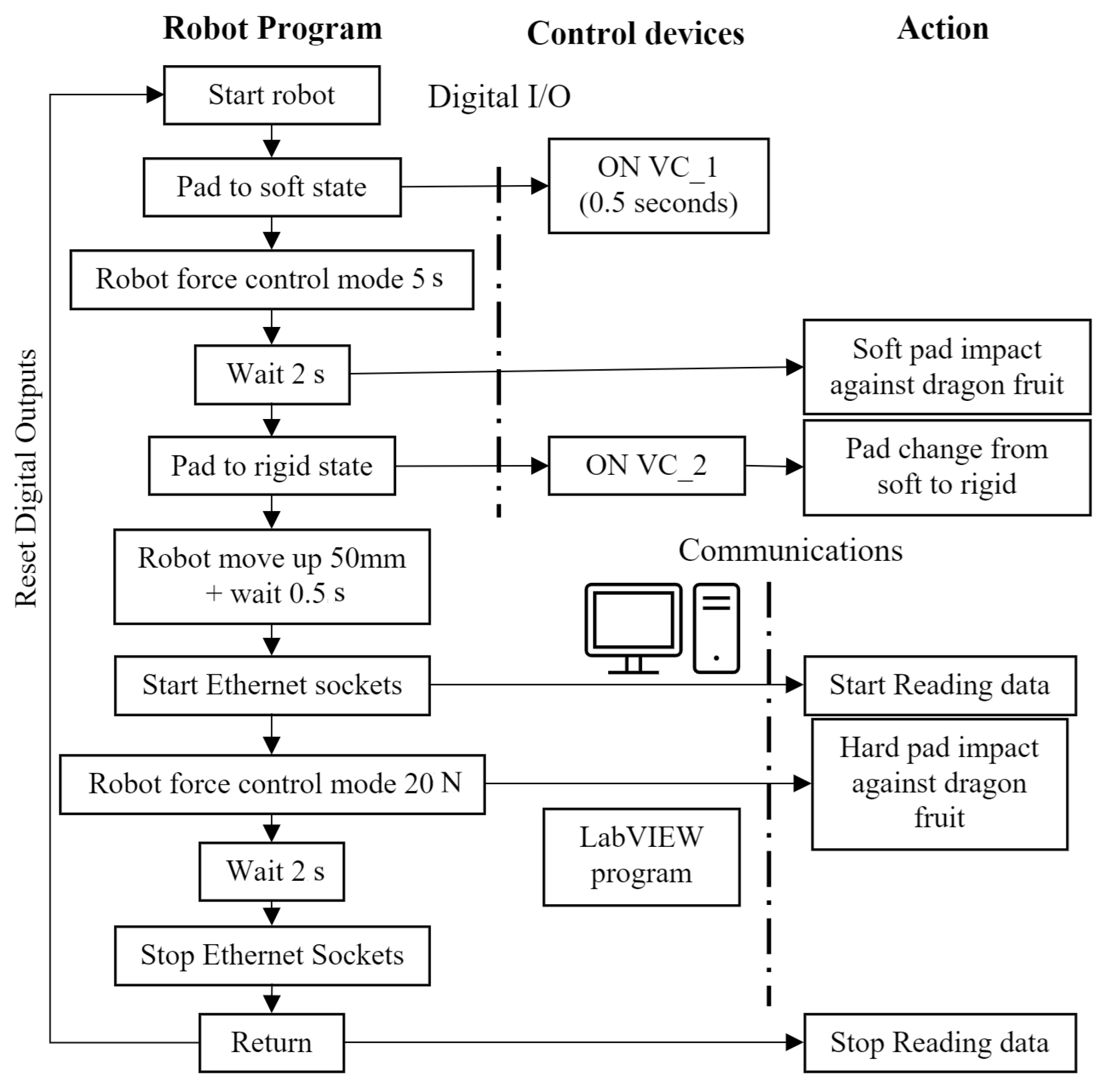
Figure 3.
Robotic impact signal and parameters used (Fmax, S1, S2 and Ss).
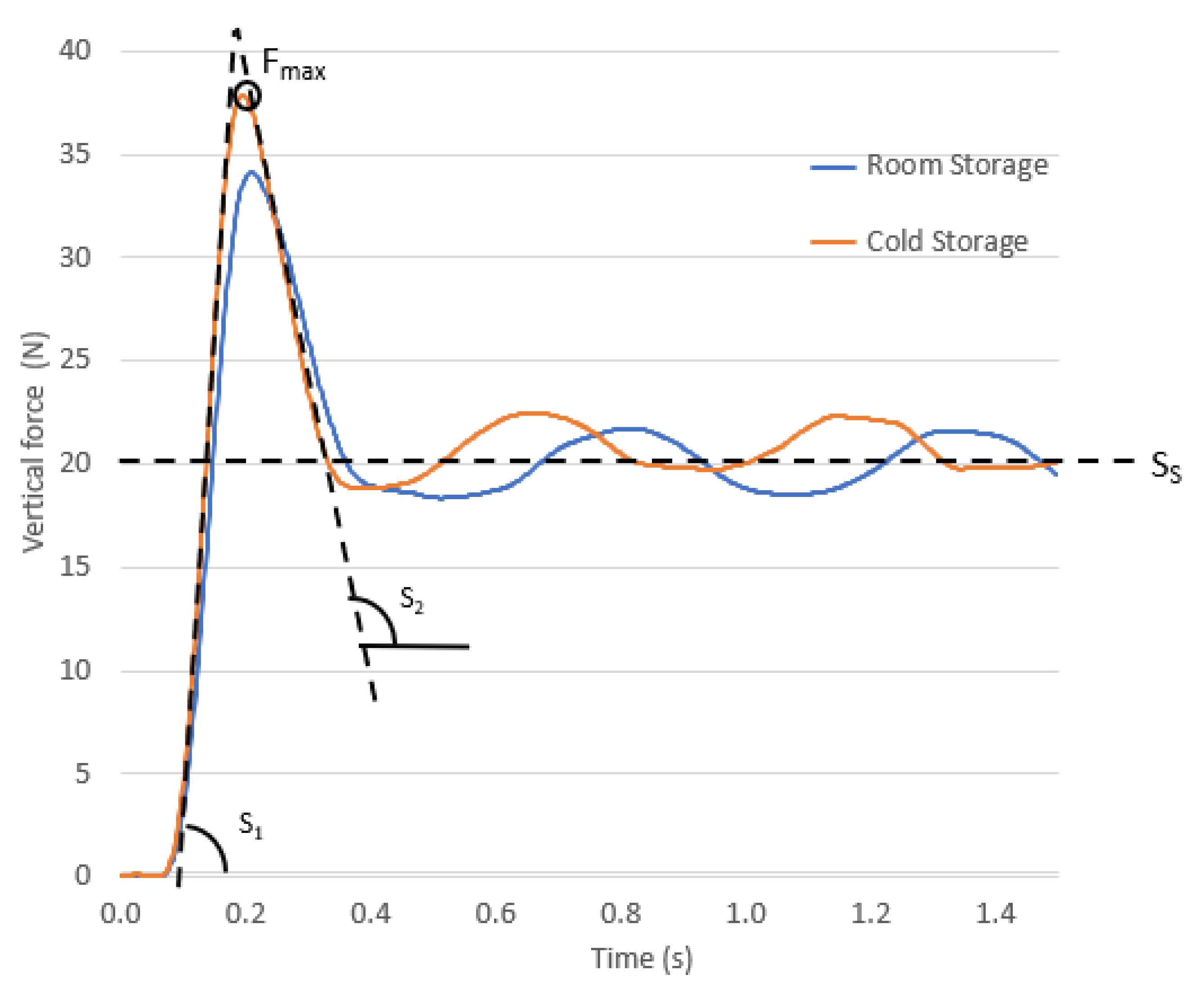
Figure 4.
Set of fruit from cold storage (left) and fruit from room storage (right) after the storage period.
Figure 4.
Set of fruit from cold storage (left) and fruit from room storage (right) after the storage period.

Figure 5.
Average and standard error of measured destructive fruit firmness with peel, Whole Fruit Firmness (N·mm) according to set (Cold storage and Room storage).
Figure 5.
Average and standard error of measured destructive fruit firmness with peel, Whole Fruit Firmness (N·mm) according to set (Cold storage and Room storage).
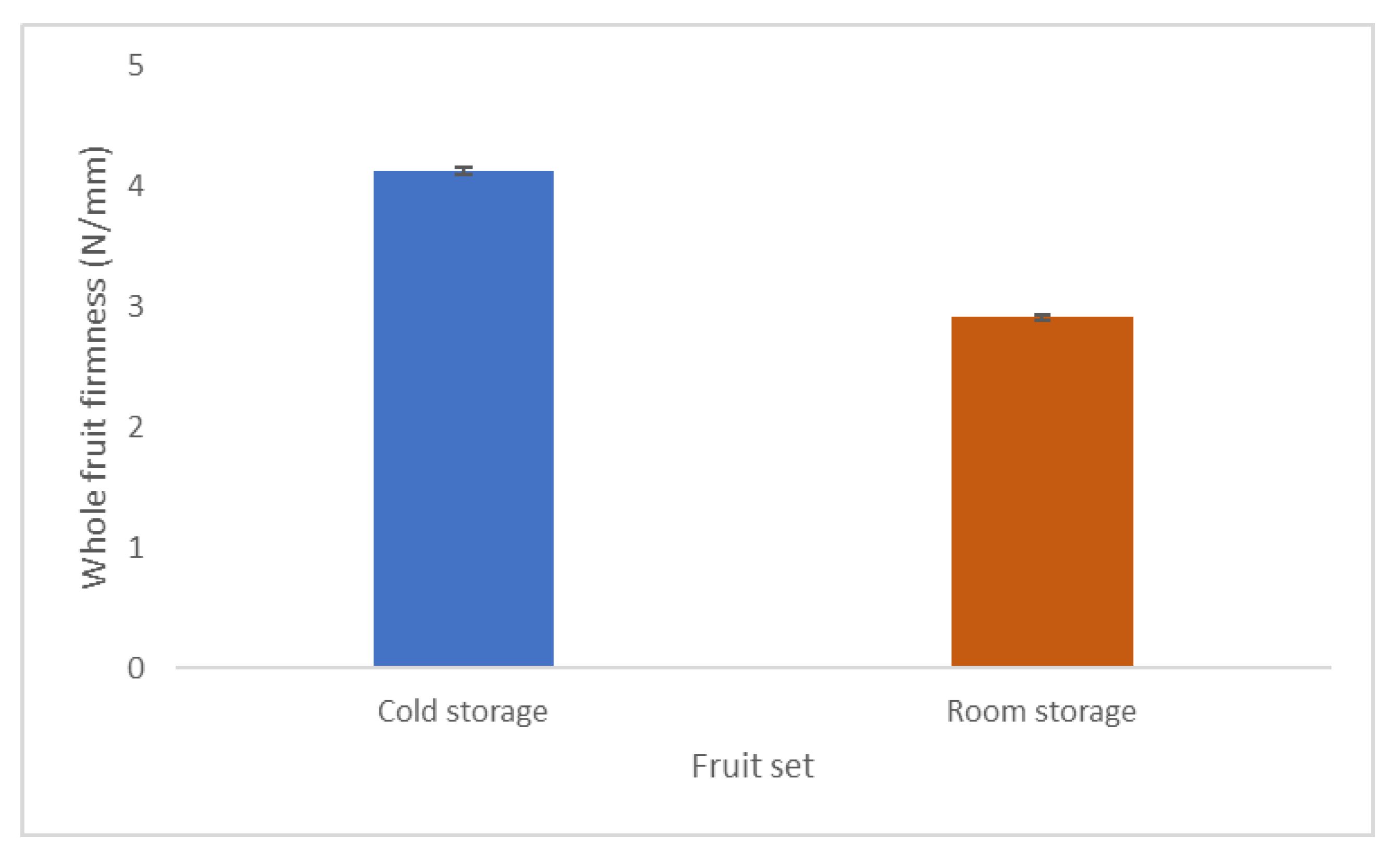
Figure 6.
Average and standard error of measured destructive fruit firmness without peel, Fruit Flesh Firmness (N·mm) according to set (Cold storage and Room storage).
Figure 6.
Average and standard error of measured destructive fruit firmness without peel, Fruit Flesh Firmness (N·mm) according to set (Cold storage and Room storage).
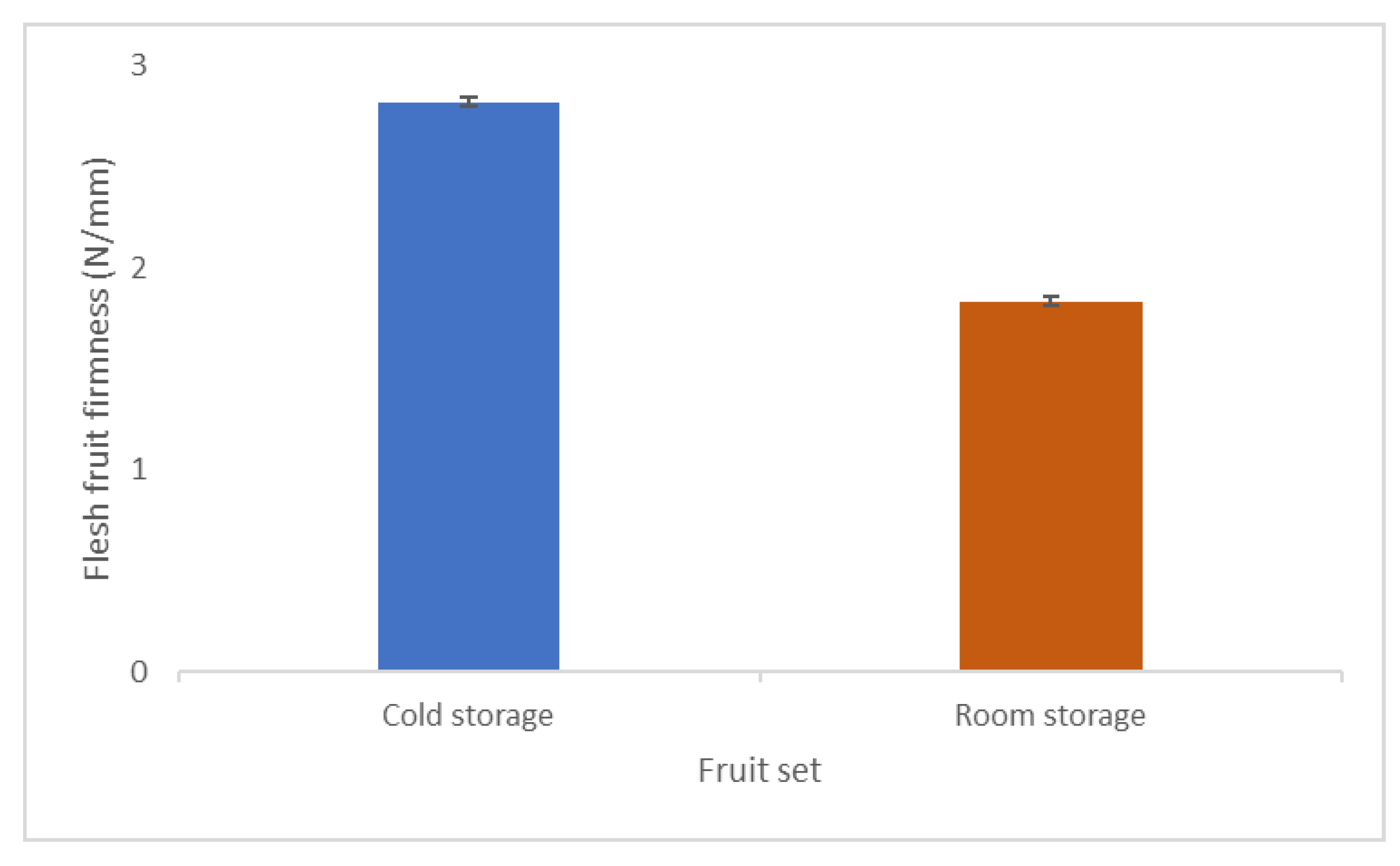
Figure 7.
Average and standard error of measured destructive Weight loss (g) according to set (Cold storage and Room storage).
Figure 7.
Average and standard error of measured destructive Weight loss (g) according to set (Cold storage and Room storage).
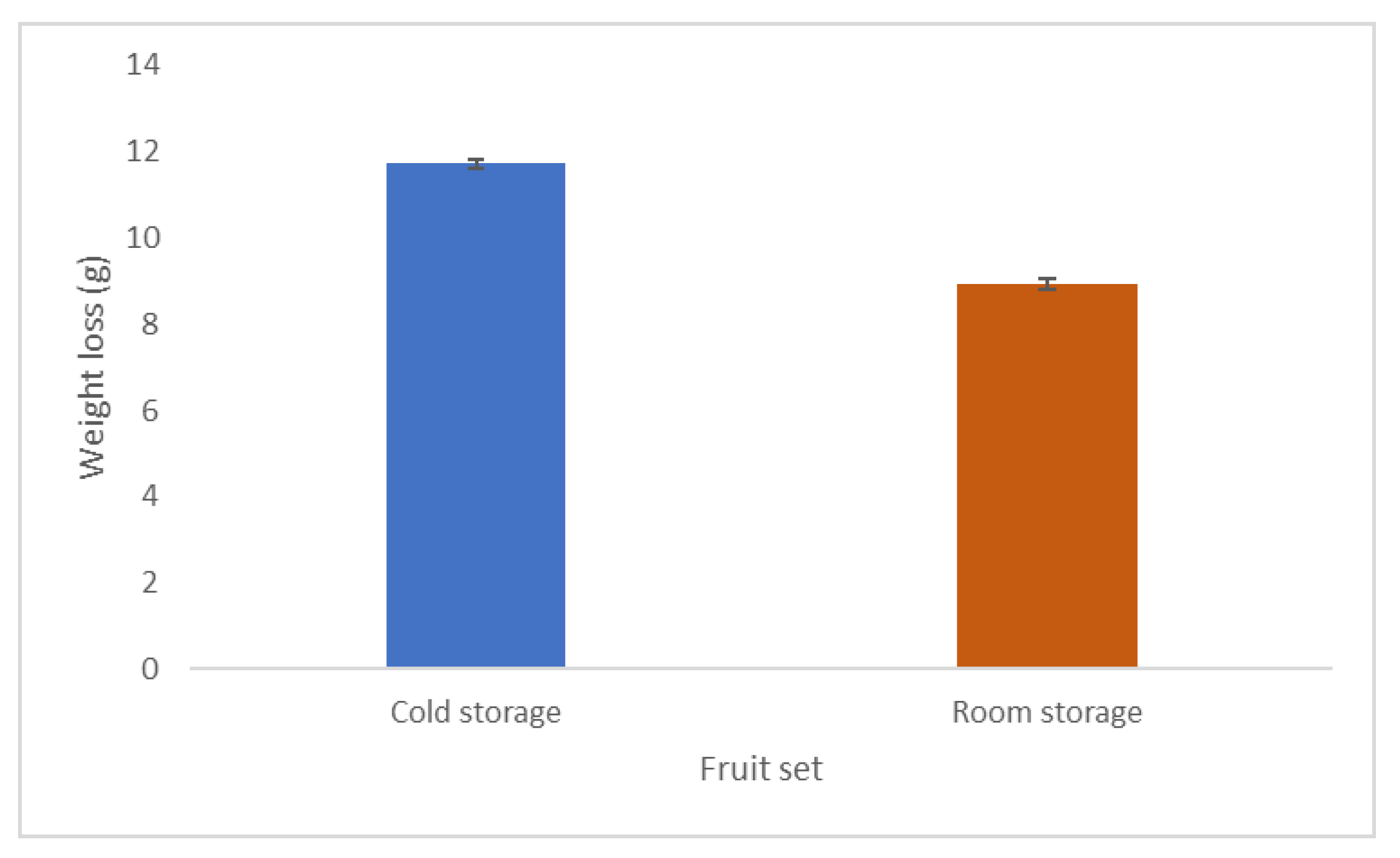
Figure 8.
Average and standard error of measured Soluble solid content (° Brix) according to set (Cold storage and Room storage).
Figure 8.
Average and standard error of measured Soluble solid content (° Brix) according to set (Cold storage and Room storage).
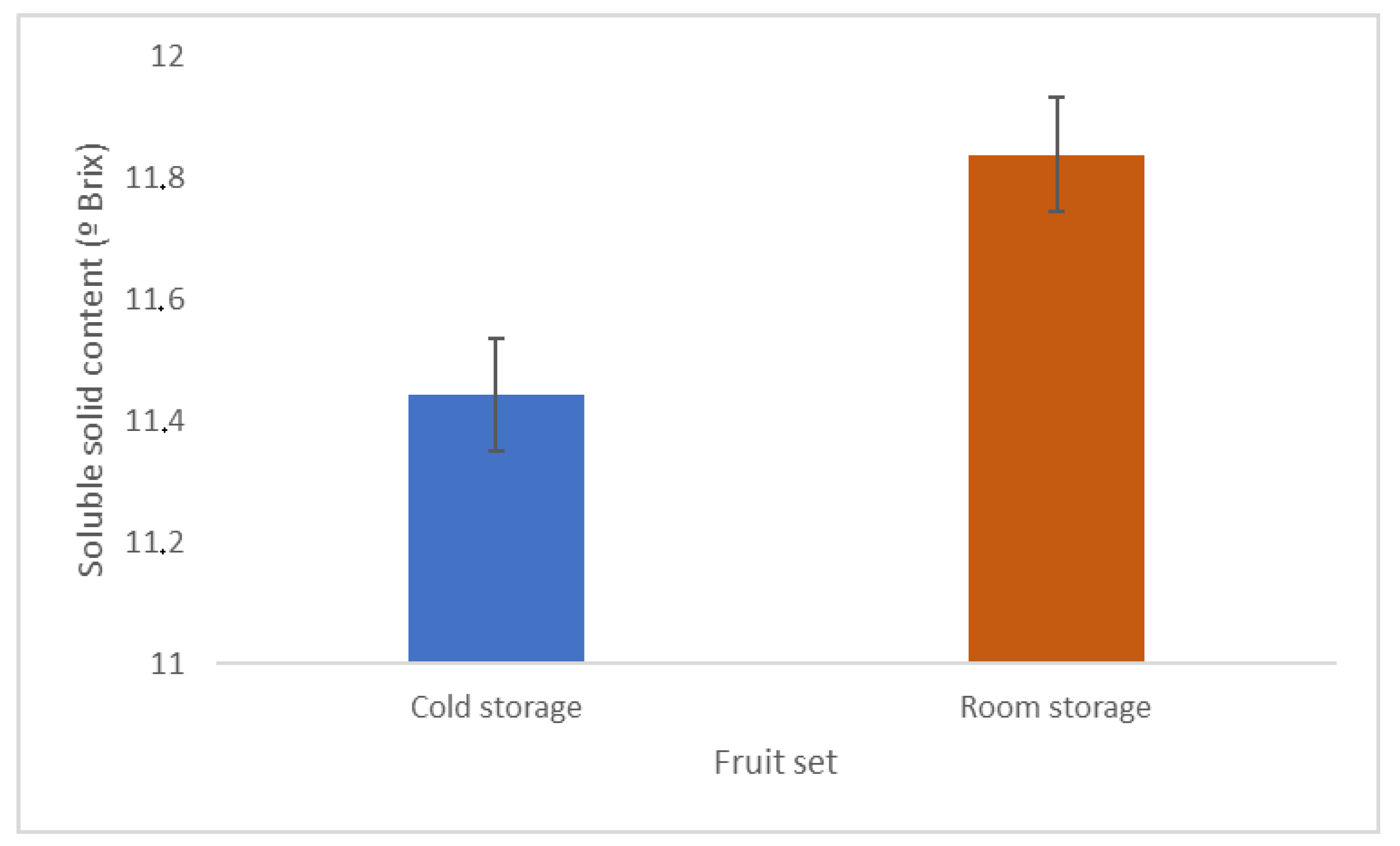
Figure 9.
Dispersion diagram of the discriminant analysis of the two sets (Cold storage and Room storage) according to Fruit Flesh Firmness (N·mm) in OY and Whole Fruit Firmness (N·mm) in OX.
Figure 9.
Dispersion diagram of the discriminant analysis of the two sets (Cold storage and Room storage) according to Fruit Flesh Firmness (N·mm) in OY and Whole Fruit Firmness (N·mm) in OX.
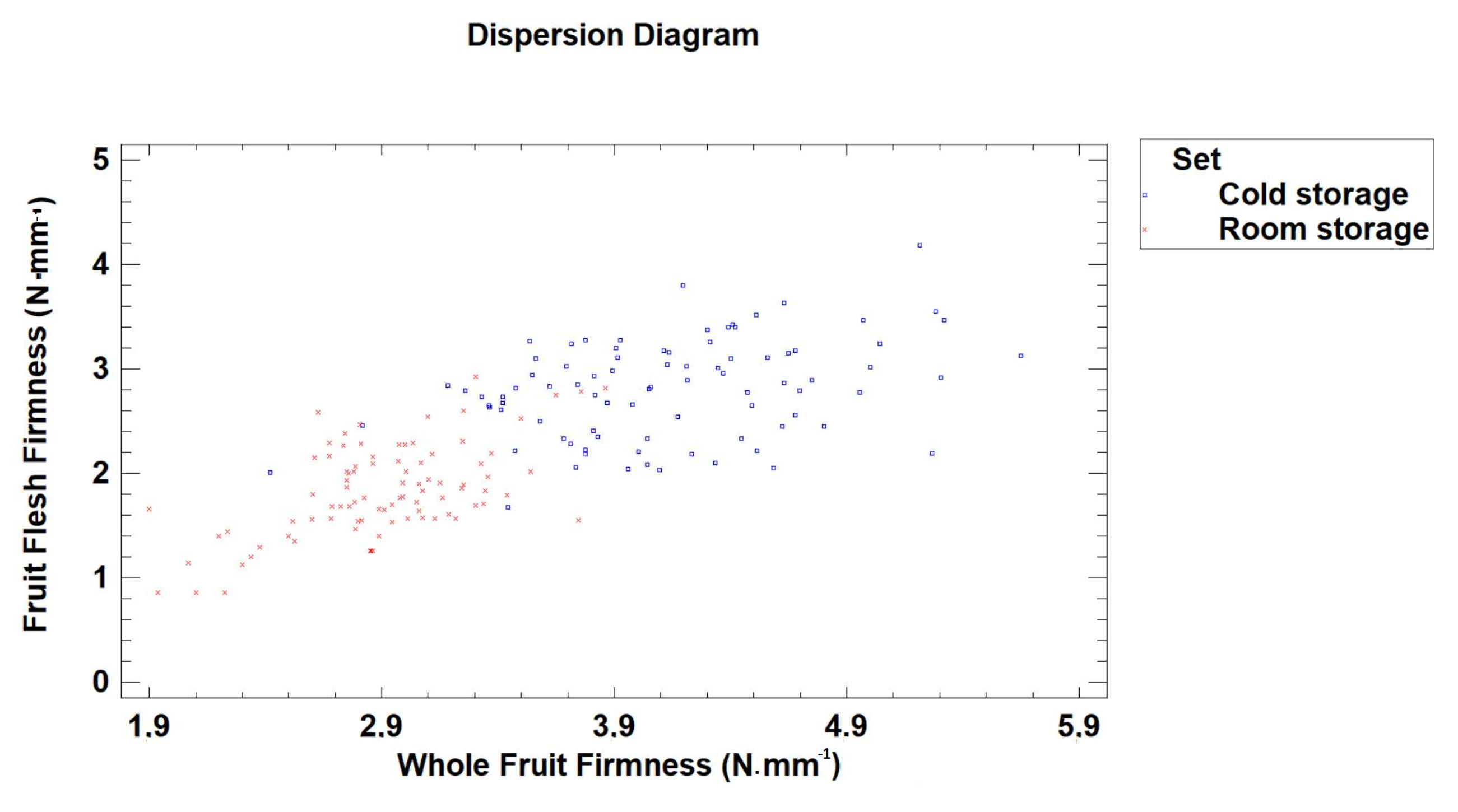
Figure 10.
Dispersion diagram of the discriminant analysis of the two quality categories (Acceptable fruit and Deteriorated fruit) according to the non-destructive variables obtained from the robotic sensor signal in OY and in OX.
Figure 10.
Dispersion diagram of the discriminant analysis of the two quality categories (Acceptable fruit and Deteriorated fruit) according to the non-destructive variables obtained from the robotic sensor signal in OY and in OX.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Effect of the factor set (acceptable/deteriorated) related to the forced storage on the quality variables.
Table 1.
Effect of the factor set (acceptable/deteriorated) related to the forced storage on the quality variables.
| Variable | F-Ratio | p-Value |
|---|---|---|
| Whole Fruit Firmness (N mm) | 260.04 | 0.0000 |
| Fruit Flesh Firmness (N mm) | 211.36 | 0.0000 |
| Weight loss | 70.39 | 0.0000 |
| Soluble Solid Content (Brix) | 2.54 | 0.1126 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ortiz, C.; Blanes, C.; Gonzalez-Planells, P.; Rovira-Más, F. Non-Destructive Evaluation of White-Flesh Dragon Fruit Decay with a Robot. Horticulturae 2023, 9, 1286. https://doi.org/10.3390/horticulturae9121286
AMA Style
Ortiz C, Blanes C, Gonzalez-Planells P, Rovira-Más F. Non-Destructive Evaluation of White-Flesh Dragon Fruit Decay with a Robot. Horticulturae. 2023; 9(12):1286. https://doi.org/10.3390/horticulturae9121286
Chicago/Turabian StyleOrtiz, Coral, Carlos Blanes, Pablo Gonzalez-Planells, and Francisco Rovira-Más. 2023. "Non-Destructive Evaluation of White-Flesh Dragon Fruit Decay with a Robot" Horticulturae 9, no. 12: 1286. https://doi.org/10.3390/horticulturae9121286
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.